| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Поиск на сайте DPVA Поставщики оборудования Полезные ссылки О проекте Обратная связь Ответы на вопросы. Оглавление
| Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация/ / Оборудование/ / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета. Поделиться:
Поиск в инженерном справочнике DPVA. Введите свой запрос: | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Если Вы не обнаружили себя в списке поставщиков, заметили ошибку, или у Вас есть дополнительные численные данные для коллег по теме, сообщите , пожалуйста. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Коды баннеров проекта DPVA.ru Консультации и техническая | Проект является некоммерческим. Информация, представленная на сайте, не является официальной и предоставлена только в целях ознакомления.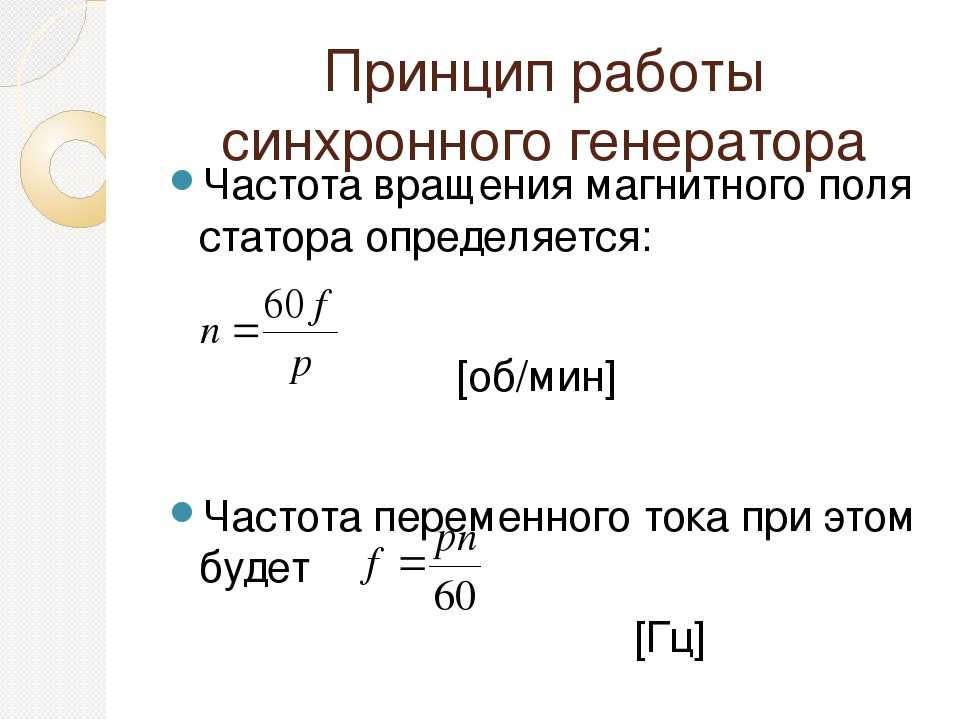 Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса. Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса.Free xml sitemap generator | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


Регулирование частоты вращения асинхронного двигателя
Регулирование частоты вращения асинхронного двигателя определяется в соответствии с требованиями технологических процессов и тех производственных механизмов, в которых он используются. Оно характеризуется следующими основными показателями.
Диапазон регулирования Д (предел изменения частоты вращения). Под этой величиной понимается отношение максимальной частоты вращения двигателя nmах к его минимальной частоте вращения nmin:
D=nmax/nmin. (54)
Плавность регулирования, которая характеризуется минимальным скачком частоты вращения двигателя при переходе с одной механической характеристики на другую.
Направление возможного изменения частоты вращения двигателя (зона регулирования).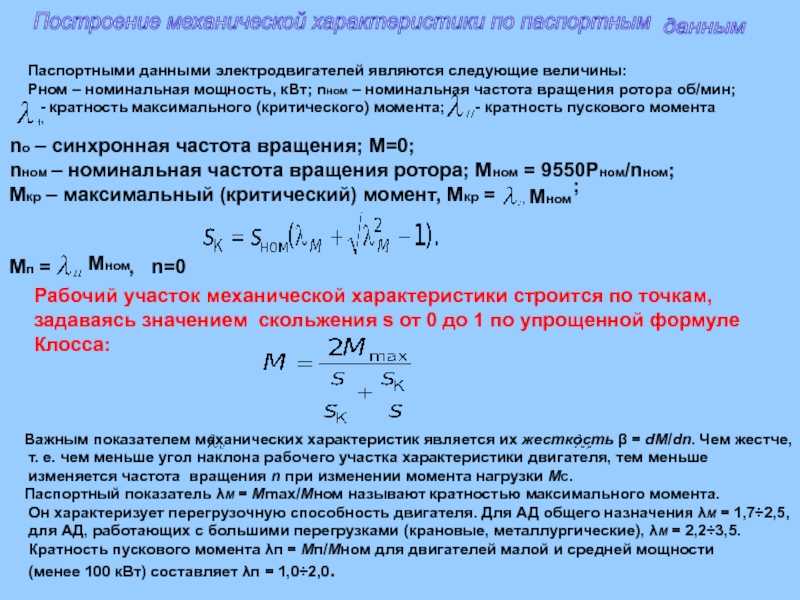 При номинальных условиях работы (напряжении и частоте питающей сети) асинхронный двигатель имеет естественную механическую характеристику. При регулировании частоты вращения соответствующие им характеристики будут отличаться от естественной. Эти характеристики носят название искусственных (регулировочных) характеристик. С помощью одних методов регулирования удается получить искусственные характеристики, располагающиеся только ниже естественной. Другие методы обеспечивают регулирование частоты вращения асинхронного двигателя выше и ниже естественной характеристики.
При номинальных условиях работы (напряжении и частоте питающей сети) асинхронный двигатель имеет естественную механическую характеристику. При регулировании частоты вращения соответствующие им характеристики будут отличаться от естественной. Эти характеристики носят название искусственных (регулировочных) характеристик. С помощью одних методов регулирования удается получить искусственные характеристики, располагающиеся только ниже естественной. Другие методы обеспечивают регулирование частоты вращения асинхронного двигателя выше и ниже естественной характеристики.
Экономичность регулирования определяется по дополнительным капитальным затратам, необходимым при создании регулировочных устройств, а также по потерям электроэнергии при регулировании.
Следует отметить, что в ряде случаев, например для механизмов, работающих сравнительно малое время на искусственных характеристиках, потери электроэнергии даже при неэкономичных способах регулирования будут невелики (работа на низких доводочных скоростях лифтов, кранов и др. ). При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии.
). При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии.
Допустимая нагрузка двигателя при работе его на регулировочных характеристиках ограничивается величинами токов в статорной и роторных цепях. Эта нагрузка определяется допустимым нагревом двигателя и во многом определяется механическими характеристиками производственных механизмов, моментом сопротивления на валу, моментом инерции двигателя и механизма и т. д.
Регулирование частоты вращения асинхронного двигателя может производиться способом воздействия на него со стороны статора или со стороны ротора.
Чтобы рассмотреть возможные способы регулирования частоты вращения, сначала получим ее выражение. В соответствии с приведенными ранее формулами (3), (4) можно записать, что частота вращения ротора n, об/мин, равна:
(55)
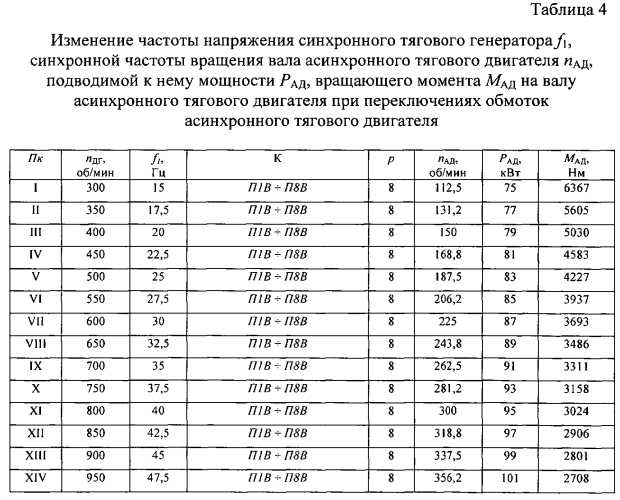
где f1 — частота питающей сети, Гц; р — число пар полюсов двигателя; s — скольжение, отн. ед.
ед.
Из формулы (55) следует, что существуют три основных способа регулирования частоты вращения:
- изменением частоты f1 питающего двигатель напряжения;
- изменением числа пар полюсов р;
- изменением скольжения s.
Воздействие на асинхронный двигатель может осуществляться как со стороны статора, так и со стороны ротора. Все три способа нашли широкое применение на практике. Рассмотрим эти способы подробнее.
Электрические асинхронные двигатели — синхронная скорость
Синхронная скорость электрического асинхронного двигателя определяется
- источником питания частотой и
- числом полюсов в обмотке двигателя.
Синхронная скорость может быть рассчитана как:
n = F (2 / P) 60 (1)
Где
N = Скорость ротационной сети (оборот / мин, мин. об/мин)
F = частота электроснабжения (Гц, циклы/с, 1/с)
P = Количество поляков
. никогда не достигнет своей синхронной скорости. Если бы это было так, то ротор казался бы неподвижным по отношению к вращающемуся полю статора, поскольку он вращался бы с той же скоростью. При отсутствии относительного движения между полем статора и ротора в двигателе не будет индуцироваться напряжение. Поэтому скорость асинхронного двигателя ограничивается скоростью ниже синхронной скорости, а разница между синхронной скоростью и фактической скоростью называется скольжением.
никогда не достигнет своей синхронной скорости. Если бы это было так, то ротор казался бы неподвижным по отношению к вращающемуся полю статора, поскольку он вращался бы с той же скоростью. При отсутствии относительного движения между полем статора и ротора в двигателе не будет индуцироваться напряжение. Поэтому скорость асинхронного двигателя ограничивается скоростью ниже синхронной скорости, а разница между синхронной скоростью и фактической скоростью называется скольжением.
Пример — Синхронная скорость электродвигателя с двумя полюсами
На двигатель с двумя полюсами подается питание с частотой 50 Гц (1/с) . Скорость вращения можно рассчитать как
n = (50 1/с) (2 / 2) (60 с/мин)
= 3000 об/мин (1/мин) 8 скорость вращения при разных частотах и числе полюсов Скорость вращения вала — n — (rev/min, rpm) Frequency
— f —
(Hz) Number of poles — p — 2 4 6 8 10 12 10 600 300 200 150 120 100 20 1200 600 400 300 240 200 30 1800 900 600 450 360 300 40 2400 1200 800 600 480 400 50 1) 3000 1500 1000 750 600 500 60 2) 3600 1800 1200 900 720 600 70 4200 2100 1400 1050 840 700 80 4800 2400 1600 1200 960 800 90 5400 2700 1800 1350 1080 900 100 6000 3000 2000 1500 1200 1000 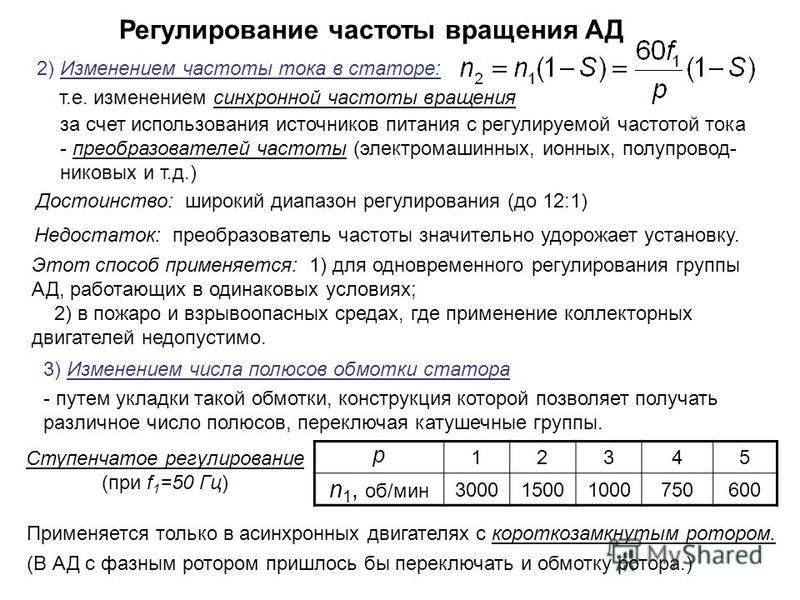
Как рассчитать число оборотов двигателя
При эксплуатации, контроле, ремонте или замене двигателя важно понимать его технические характеристики. Одним из важных измерений является число оборотов в минуту или RPM, которое описывает скорость двигателя. В этом руководстве мы обсудим, как рассчитать число оборотов двигателя и почему это так важно.
Что такое число оборотов двигателя?
Об/мин — это единица измерения, используемая для описания скорости двигателя. Он обозначает количество оборотов в минуту и описывает скорость, с которой вращается ротор, то есть количество раз, которое вал ротора совершает полный оборот в минуту. Его можно использовать для измерения скорости двигателей, турбин, центрифуг, конвейеров и другого оборудования.
Почему важно рассчитывать число оборотов в минуту
Расчет числа оборотов двигателя, а также другие измерения, такие как крутящий момент, напряжение и мощность, необходимы при выборе двигателя для конкретного применения.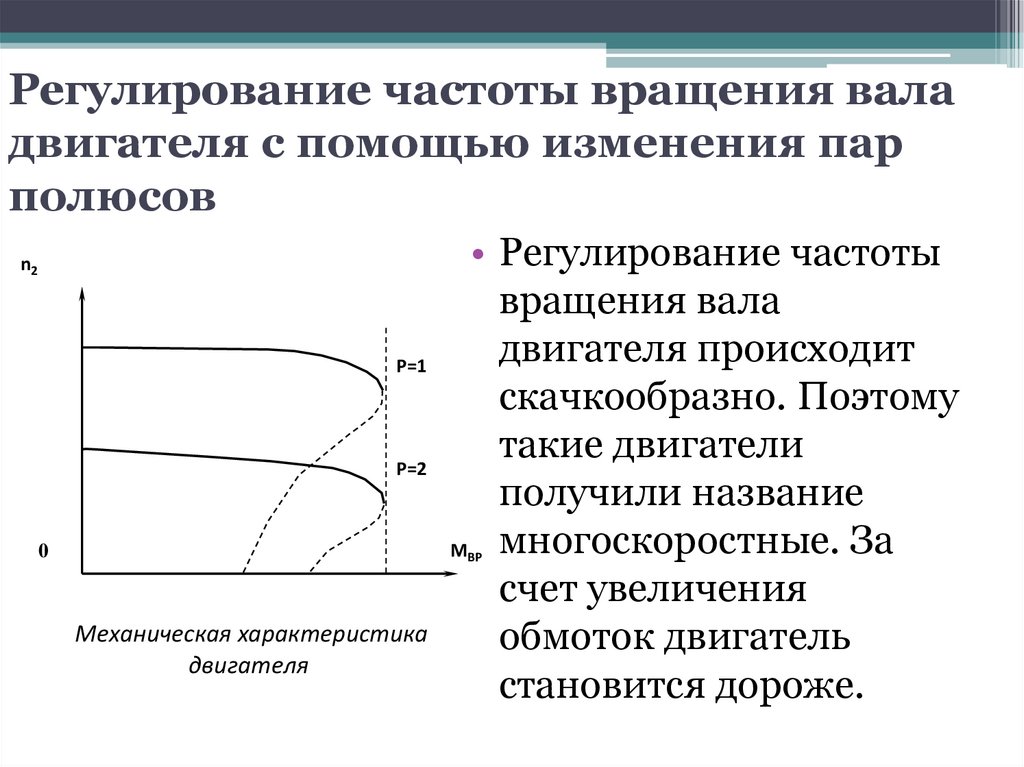 Расчет скорости двигателя может помочь вам выбрать правильный тип двигателя при замене компонентов и принять более взвешенные решения по ремонту. Вам также необходимо понимать число оборотов в минуту, чтобы эффективно контролировать и контролировать работу двигателя.
Расчет скорости двигателя может помочь вам выбрать правильный тип двигателя при замене компонентов и принять более взвешенные решения по ремонту. Вам также необходимо понимать число оборотов в минуту, чтобы эффективно контролировать и контролировать работу двигателя.
Запросить цену
Скорости асинхронного двигателя переменного тока
Двигатели переменного тока предназначены для работы на определенных скоростях. Эти скорости одинаковы даже для разных моделей и производителей. Скорость данного двигателя зависит от частоты сети источника питания, а не от напряжения, а также от количества полюсов, которые он имеет. Двигатели переменного тока часто имеют два или четыре полюса, но могут иметь и больше. Связь между полюсами и числом оборотов двигателя связана с магнитным полем, создаваемым полюсами статора. Это поле приводит к созданию магнитных полей в роторе, которые связаны с частотой поля в статоре.
Также необходимо учитывать скольжение, которое представляет собой разницу между синхронной скоростью статора и фактической рабочей скоростью. Ротор всегда вращается немного медленнее, чем магнитное поле статора, и всегда пытается «догнать» его, что создает крутящий момент, необходимый для запуска двигателя.
Ротор всегда вращается немного медленнее, чем магнитное поле статора, и всегда пытается «догнать» его, что создает крутящий момент, необходимый для запуска двигателя.
Чтобы отрегулировать скорость трехфазного двигателя переменного тока, вы можете отрегулировать частоту источника питания двигателя переменного тока с помощью элемента управления. Многие устройства управления переменным током также имеют однофазный вход, что позволяет запускать трехфазные двигатели, даже если у вас нет трехфазного питания. С другой стороны, большинство однофазных двигателей переменного тока не регулируются, поскольку они подключаются непосредственно к стандартной розетке и используют доступную частоту.
Скорости двигателя постоянного тока
Как и асинхронные двигатели переменного тока, двигатели постоянного тока с постоянными магнитами также имеют полюса, но полюса не влияют на скорость, как у двигателей переменного тока. На скорость двигателей постоянного тока влияет несколько других факторов, в том числе рабочее напряжение двигателя, сила магнитов и количество витков провода в якоре. Двигатели постоянного тока могут работать только на скоростях, номинальных для доступного для них напряжения.
Двигатели постоянного тока могут работать только на скоростях, номинальных для доступного для них напряжения.
Если батарея, от которой работает двигатель, начинает разряжаться и подавать меньшее напряжение, скорость двигателя снижается. Если вы подключите двигатель к источнику питания, скорость увеличится, хотя это может вызвать дополнительный износ двигателя. Вы также можете использовать элементы управления для регулировки скорости двигателя постоянного тока, который работает путем изменения напряжения, доступного для двигателя.
Услуги по ремонту двигателей переменного/постоянного тока
Как рассчитать число оборотов двигателя
Чтобы рассчитать число оборотов асинхронного двигателя переменного тока, вы умножаете частоту в герцах (Гц) на 60 — — для количества секунд в минуте — на два для отрицательные и положительные импульсы в цикле. Затем вы делите на количество полюсов двигателя:
- (Гц x 60 x 2) / количество полюсов = об/мин без нагрузки
Вы также можете рассчитать коэффициент скольжения, вычитая номинальную скорость при полной нагрузке из синхронной скорости, разделив полученный результат на синхронную скорость и умножив его на 100:
- ((синхронная скорость при номинальной скорости при полной нагрузке) / (синхронная скорость)) x 100 = коэффициент скольжения
Затем, чтобы найти число оборотов при полной нагрузке, вы конвертируете показатель скольжения в число оборотов в минуту, а затем вычитаете его из числа оборотов без нагрузки:
- Для расчета оборотов при полной нагрузке: об/мин – проскальзывание оборотов = об/мин при полной нагрузке
Скорость вращения двигателя постоянного тока зависит от напряжения, подаваемого на двигатель. Как правило, производитель двигателя сообщает вам число оборотов в минуту, которое вы можете ожидать при различных напряжениях. Чтобы достичь желаемых оборотов, вы можете отрегулировать напряжение в соответствии с рекомендациями.
Как правило, производитель двигателя сообщает вам число оборотов в минуту, которое вы можете ожидать при различных напряжениях. Чтобы достичь желаемых оборотов, вы можете отрегулировать напряжение в соответствии с рекомендациями.
Примеры расчета формулы оборотов двигателя
Давайте рассмотрим некоторые примеры формулы оборотов. Для двигателя переменного тока число полюсов и частота определяют число оборотов холостого хода. Для системы с частотой 60 Гц с четырьмя полюсами уравнение оборотов будет следующим:
- (Гц x 60 x 2) / количество полюсов = число оборотов без нагрузки
- (60 х 60 х 2) / 4
- 7 200 / 4 = 1 800 об/мин
Величина скольжения незначительно зависит от конструкции двигателя. Разумная скорость при полной нагрузке для четырехполюсного двигателя с частотой 60 Гц составляет 1725 об/мин. Скольжение – это разница между скоростью без нагрузки и скоростью с полной нагрузкой. В данном случае это будет:
- Обороты при полной нагрузке – Обороты без нагрузки = проскальзывание оборотов
- 1800 – 1725 = 75 об/мин
При частоте 60 Гц двухполюсный двигатель работает со скоростью 3600 об/мин без нагрузки и около 3450 об/мин с нагрузкой:
- (Гц x 60 x 2) / число полюсов = об/мин без нагрузки
- (60 х 60 х 2) / 4
- 7 200 / 2 = 3 600 об/мин
При частоте 60 Гц шестиполюсный двигатель будет работать со скоростью 1200 об/мин без нагрузки и приблизительно со скоростью 1175 об/мин с нагрузкой.