Содержание
clover/lesson5.md at master · CopterExpress/clover · GitHub
Принцип работы бесколлекторного электродвигателя
Бесколлекторные двигатели постоянного тока называют так же вентильными, в зарубежной литературе BLDCM (BrushLes Direct Current Motor) или PMSM (Permanent Magnet Synchronous Motor).
Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками, в отличие от коллекторного двигателя, где обмотки находятся на роторе. Из конструкции двигателя удаляется довольно сложный, требующий обслуживания тяжелый и искрящий узел – коллектор. Конструкция двигателя существенно упрощается. Двигатель получается легче и компактнее. Значительно уменьшаются потери на коммутацию, поскольку контакты коллектора и щетки заменяются электронными ключами. В итоге получаем электродвигатель с наилучшими показателями КПД и показателем мощности на килограмм собственного веса, с наиболее широким диапазоном изменения скорости вращения. На практике бесколлекторные двигатели греются меньше, чем их коллекторные братья. Переносят большую нагрузку по моменту. Применение мощных неодимовых магнитов сделали бесколлекторные двигатели еще более компактными. Конструкция бесколлекторного двигателя позволяет эксплуатировать его в воде и агрессивных средах (разумеется, только двигатель, регулятор мочить будет очень дорого). Бесколлекторные двигатели практически не создают радиопомех.
На практике бесколлекторные двигатели греются меньше, чем их коллекторные братья. Переносят большую нагрузку по моменту. Применение мощных неодимовых магнитов сделали бесколлекторные двигатели еще более компактными. Конструкция бесколлекторного двигателя позволяет эксплуатировать его в воде и агрессивных средах (разумеется, только двигатель, регулятор мочить будет очень дорого). Бесколлекторные двигатели практически не создают радиопомех.
Единственным недостатком считают сложный дорогостоящий электронный блок управления (регулятор или ESC). Однако, если вы хотите управлять оборотами двигателя, без электроники никак не обойтись. Если вам не надо управлять оборотами бесколлекторного двигателя, без электронного блока управления все равно не обойтись. Бесколлекторный двигатель без электроники – просто железка. Нет возможности подать на него напряжение и добиться нормального вращения как у других двигателей.
Применение датчиков
Двигатели с датчиками положения более предпочтительны с технической точки зрения. Алгоритм управления такими двигателями значительно проще. Однако есть и свои минусы: требуется обеспечить питание датчиков и прокладку проводов от датчиков в двигателе к управляющей электронике; в случае выхода со строя одного из датчиков, двигатель прекращает работу, а замена датчиков, как правило, требует разборки двигателя.
Алгоритм управления такими двигателями значительно проще. Однако есть и свои минусы: требуется обеспечить питание датчиков и прокладку проводов от датчиков в двигателе к управляющей электронике; в случае выхода со строя одного из датчиков, двигатель прекращает работу, а замена датчиков, как правило, требует разборки двигателя.
В тех случаях, когда конструктивно невозможно разместить датчики в корпусе двигателя, используют двигатели без датчиков. Конструктивно такие двигатели практически не отличаются от двигателей с датчиками. А вот электронный блок должен уметь управлять двигателем без датчиков. При этом блок управления должен соответствовать характеристикам конкретной модели двигателя.
Если двигатель должен стартовать с существенной нагрузкой на валу двигателя (электротранспорт, подъёмные механизмы и т.п.) – применяют двигатели с датчиками.
Если двигатель стартует без нагрузки на валу (вентиляция, воздушный винт, применяется центробежная муфта сцепления и т. п.), можно применять двигатели без датчиков. Запомните: двигатель без датчиков положения должен стартовать без нагрузки на валу. Если это условие не соблюдается, следует использовать двигатель с датчиками. Кроме того, в момент старта двигателя без датчиков возможны вращательные колебания оси двигателя в разные стороны. Если это критично для Вашей системы, применяйте двигатель с датчиками.
п.), можно применять двигатели без датчиков. Запомните: двигатель без датчиков положения должен стартовать без нагрузки на валу. Если это условие не соблюдается, следует использовать двигатель с датчиками. Кроме того, в момент старта двигателя без датчиков возможны вращательные колебания оси двигателя в разные стороны. Если это критично для Вашей системы, применяйте двигатель с датчиками.
Три фазы
Трехфазные бесколлекторные двигатели приобрели наибольшее распространение. Но они могут быть и одно, двух, трех и более фазными. Чем больше фаз, тем более плавное вращение магнитного поля, но и сложнее система управления двигателем. 3-х фазная система наиболее оптимальна по соотношению эффективность/сложность, поэтому и получила столь широкое распространение. Далее будет рассматриваться только трехфазная схема, как наиболее распространенная. Фактически фазы – это обмотки двигателя. Поэтому если сказать “трехобмоточный”, думаю, это тоже будет правильно. Три обмотки соединяются по схеме “звезда” или “треугольник”. Трехфазный бесколлекторный двигатель имеет три провода – выводы обмоток.
Трехфазный бесколлекторный двигатель имеет три провода – выводы обмоток.
Двигатели с датчиками имеют дополнительных 5 проводов (2-питание датчиков положения, и 3 сигналы от датчиков).
В трехфазной системе в каждый момент времени напряжение подается на две из трех обмоток. Таким образом, есть 6 вариантов подачи постоянного напряжения на обмотки двигателя, как показано на рисунке ниже.
Это позволяет создать вращающееся магнитное поле, которое будет проворачиваться “шагами” на 60 градусов при каждом переключении.
Основные характеристики контроллеров
Для управления двигателем применяется электронный регулятор. В зарубежной литературе Speed Controller или ESC (Electronic speed control).
Максимальный постоянный (сontinius) ток – указывает, какой ток контроллер способен держать продолжительное время. Как правило, этот параметр входит в обозначение контроллера (например Jes -18, Phoenix -10). Иногда указывают величину «кратковременного» тока, допустимого в течении нескольких секунд.
Иногда указывают величину «кратковременного» тока, допустимого в течении нескольких секунд.
«Кратковременный» ток способны держать выходные транзисторы контроллера, но рассеивать выделяемое при этом токе количество тепла контроллер не в состоянии.
Максимальное рабочее напряжение — указывается, с каким количеством NiCd или литий-полимерных банок можно использовать контроллер. Для контроллеров с ВЕС-ом, эта величина может быть разная, в зависимости от количества сервомашинок. Это связано с рассеиванием тепла стабилизатором схемы ВЕС — при большем числе банок максимальный ток нагрузки BEC и, следовательно, количество сервомашинок меньше. Как правило, если используется ВЕС, количество банок не превышает 12. Если вы хотите работать с большим количеством банок, то придется ставить или отдельную батарею питания приемника, или использовать внешний ВЕС. Но в любом случае нельзя превышать максимальное напряжение, допустимое для контроллера.
Максимальные обороты (maximum rpm) — программное ограничение максимальных оборотов. Всегда указывается для двухполюсного двигателя. Для многополюсных моторов это число надо разделить на количество пар полюсов. Например, если указано 63000 rpm, то для мотора с 12-ю магнитами максимальные обороты будут 63000/6=10500 rpm, а это уже не так много… Данная функция не дает мотору набрать большее, чем указано количество оборотов, некоторые контроллеры при превышении этого значения на холостом ходу начинают сбоить, вызывая значительные броски тока — мотор начинает резко дергаться. Этот эффект не является признаком неисправности мотора ли контроллера.
Всегда указывается для двухполюсного двигателя. Для многополюсных моторов это число надо разделить на количество пар полюсов. Например, если указано 63000 rpm, то для мотора с 12-ю магнитами максимальные обороты будут 63000/6=10500 rpm, а это уже не так много… Данная функция не дает мотору набрать большее, чем указано количество оборотов, некоторые контроллеры при превышении этого значения на холостом ходу начинают сбоить, вызывая значительные броски тока — мотор начинает резко дергаться. Этот эффект не является признаком неисправности мотора ли контроллера.
Внутреннее сопротивление – полное сопротивление силовых ключей контроллера, без учета проводов. Чем мощнее контроллер, тем меньше его внутреннее сопротивление. Как правило, сопротивление проводов сравнимо с внутренним сопротивлением контроллера и вносит до 30% потерь. Для примера, внутреннее сопротивление контроллера Castle Creations Phoenix-25 13 mOhm, а сопротивление 30 см провода сечением 1кв.мм – 6 mOhm, то есть почти треть потерь приходится на провода.
Частота импульсов контроллера (PWM Frequency) — как правило, составляет 7-8 Кгц. У «продвинутых» контроллеров частоту регулирования можно программировать на другие значения- 16 и 32 Кгц. Эти значения применяется в основном для высокооборотных 3-4-х витковых моторов с малой индуктивностью, при этом улучшается линейность регулирования частоты вращения.
Особенности подключения
Провода — не такое простое дело, как может показаться на первый взгляд. Есть несколько важных аспектов.
Самое главное — нельзя делать провода от контроллера до аккумулятора большой длины! Дело в том, что стартовые токи беколлекторных моторов намного больше, чем аналогичных коллекторных, и при работе моторов возникают большие броски тока. Конденсаторы, всегда стоящие на входе контроллера, должны быть специального типа, но многие производители ставят обычные.
При удлинении проводов от контроллера до батареи начинает сказываться их индуктивность, и может возникнуть ситуация, когда уровень помех по напряжению питания на входе контроллера станет настолько высок, что контроллер не сможет правильно определить положение ротора мотора (иногда при этом еще и «повисает» процессор контроллера). Известно несколько случаев полного «выгорания в дым» контроллеров, при удлинении проводов со стороны аккумулятора до 30см. Если необходимо увеличить длину проводов (например, двигатель стоит в хвосте модели), то надо увеличивать длину проводов от мотора до контроллера. Как правило, контроллеры поставляются с проводами до батареи длиной 13-16см. Такая длина вполне достаточна для надежной работы контроллера, и не следует ее увеличивать более чем на 5см.
Известно несколько случаев полного «выгорания в дым» контроллеров, при удлинении проводов со стороны аккумулятора до 30см. Если необходимо увеличить длину проводов (например, двигатель стоит в хвосте модели), то надо увеличивать длину проводов от мотора до контроллера. Как правило, контроллеры поставляются с проводами до батареи длиной 13-16см. Такая длина вполне достаточна для надежной работы контроллера, и не следует ее увеличивать более чем на 5см.
Кроме того, длинные провода до батареи могут вызывать проблемы при резком старте мотора — контроллер может не перейти от режима старта к рабочему режиму при слишком резком прибавлении “газа”. Для предотвращения этого эффекта во многих контроллерах есть специальные настройки.
Настройки
Практически все современные контроллеры имеют множество программных настроек. От них зависит режим работы, надежность, а иногда и работоспособность контроллера в паре с тем или иным мотором. Здесь мы попробуем перечислить основные настройки, и объяснить, как и на что они влияют.
Напряжение выключения мотора (cut-off voltage) – при каком минимальном напряжении на батарее мотор будет выключен. Эта функция предназначена для сохранения работоспособности аппаратуры при разряде батареи и для защиты самой батареи от переразряда (последнее особенно важно для литий- полимерных аккумуляторов). На некоторых контроллерах (например, Jeti серии “ Advansed ”) нет установки напряжения на конкретное число банок в случае использования литиевых батарей, количество банок при этом определяется автоматически.
Тип выключения мотора (cut-off voltage) – как правило имеет 2 значения — плавный (soft cut-off) и жесткий (hard cut-off).
При плавном выключении мотора контроллер сбрасывает обороты постепенно, не позволяя напряжению на батарее упасть ниже заданного, при этом контроль над моделью сохраняется до последнего.
При жестком — мотор немедленно останавливается если зафиксированно падение напряжения ниже заданного. Жесткое отключение может доставить некоторые неудобства при разряженном аккумуляторе: манипулируя газом, вместо небольшой прибавки оборотов иногда получается полный останов мотора.
Тормоз (brake) – торможение мотора после установки газа в «ноль». Может иметь значения включен/выключен, на некоторых контроллерах есть еще программируемая величина тормоза 50-100% и задержка включения тормоза после полного сброса газа. Это необходимо для защиты шестеренок редуктора в случае использования больших и тяжелых пропеллеров. В некоторых контроллерах, например том же Jeti серии «Advanced» тормоз и плавное выключения мотора – установки взаимоисключающие – для включения плавного отключения мотора надо выключить тормоз и наоборот… Намудрили чехи, однако.
Опережение (Timing) – параметр, от которого зависит мощность и КПД двигателя. Может находится в пределах от 0° до 30°. Физически это электрический угол опережения коммутации обмоток.
Режим старта (start mode) — не имеет как правило каких-то числовых значений, описывается только как мягкий, (soft) жесткий (hard), быстрый (fast) и пр. Быстрый старт рекомендуется для моторов без редукторов и для использования в соревнованиях. При использовании быстрого старта в моторах с редукторами возможно повреждение шестерен. Плавный старт обеспечивает меньшие пусковые токи в момент старта и позволяет избежать возможных перегрузок по току контроллера, но время раскрутки мотора до полных оборотов увеличивается.
Быстрый старт рекомендуется для моторов без редукторов и для использования в соревнованиях. При использовании быстрого старта в моторах с редукторами возможно повреждение шестерен. Плавный старт обеспечивает меньшие пусковые токи в момент старта и позволяет избежать возможных перегрузок по току контроллера, но время раскрутки мотора до полных оборотов увеличивается.
Время акселерации или задержка акселерации (acceleration time или acceleration delay) – устанавливает время набора оборотов после старта до максимума. Устанавливается меньше для моторов с легкими пропеллерами без редукторов и больше для моторов с редукторами и в случае срабатывания защиты по току при резком прибавлении газа.
Ограничение тока (Current limiting) – уровень срабатывания защиты по току. Устанавливается более чувствительным в случае применения моторов с большим стартовым током и батарей с высоким внутренним сопротивлением. При этом желательно установить плавное отключение мотора, в противном случае при резких манипуляциях газом мотор будет останавливаться. Не рекомендуется отключать защиту по току, если вы не уверены ,что ток мотора не может превысить максимально допустимое значение для контроллера. Это может привести к повреждению контроллера большими стартовыми токами.
Не рекомендуется отключать защиту по току, если вы не уверены ,что ток мотора не может превысить максимально допустимое значение для контроллера. Это может привести к повреждению контроллера большими стартовыми токами.
Режим газа (throttle type или throttle mode) – устанавливает зависимость оборотов мотора от ручки газа. Может иметь значения автокалибровки ( auto calibrating ) – при этом контроллер самостоятельно определяет положение малого и полного газа, а также фиксированный ( fixed ) — когда характеристика задана производителем.
Также в некоторых контроллерах присутствует режим «гувернер» (governor), он предназначен для вертолетов, когда положению ручки газа соответствуют определенные обороты, а не мощность двигателя, контроллер в данном режиме работает как автоматическая система поддержания оборотов, прибавляя мощность при увеличении нагрузки на двигатель.
Реверс (reverse) — смена направления вращения. Обычно для изменения направления вращения двигателя надо поменять местами любые два провода от мотора. Но в продвинутых контроллерах, возможно изменить направление вращения мотора программно.
Обычно для изменения направления вращения двигателя надо поменять местами любые два провода от мотора. Но в продвинутых контроллерах, возможно изменить направление вращения мотора программно.
Возможные проблемы
Как показывает практика — 70% проблем при использовании контроллеров связано со стартом двигателей. Если мотор у вас плохо стартует, то есть начинает вращаться, а потом останавливается — большинство причин кроется в больших бросках тока и как следствие, провалах питающего напряжения. В первую очередь проверьте провода до батареи. Пробную проверку лучше производить на той длине проводов, которые даны изготовителем, или короче.
Далее — попробуйте снять нагрузку с мотора и проверить его на холостом ходу. Если на хостом ходу все в порядке, а при установке пропеллера мотор упорно не желает крутится, только дергается в одном направлении, попробуйте поставить мягкий старт или увеличить время акселерации. Также здесь поможет установка плавного выключения мотора. Контроллеры, у которых есть ограничение тока, всегда имеют индикацию этого режима — опять же читайте инструкцию, чтобы установить, произошло срабатывание токовой защиты или нет…
Контроллеры, у которых есть ограничение тока, всегда имеют индикацию этого режима — опять же читайте инструкцию, чтобы установить, произошло срабатывание токовой защиты или нет…
Старые «золотые» Jeti серия Jes 18, отличаются, например одной особенностью — у них нет плавного выключения, и при попытке работы мотора с большими пусковыми токами от старых аккумуляторов, при резком движении ручкой газа мотор останавливается, если напряжение упало до 5.2 вольта. Это не неисправность контроллеров, это у них такой алгоритм выключения мотора: напряжение упало — мотор остановился…
Иногда бывает, что мотор стартует в другую сторону, набирает примерно 20-30% оборотов, потом «одумывается», и резко начинает крутится в нужном направлении. Останов и реверс сопровождаются резким броском тока, иногда срабатывает токовая защита. Данная ситуация происходит только с 2-3х витковыми двухполюсными спортивными моторами при наличии резкого старта. Причем мотор ведет так себя не всегда, примерно в 10% случаев. Выход из этой ситуации — опять же использование плавного старта.
Выход из этой ситуации — опять же использование плавного старта.
Контрольные вопросы
- Зачем нужны датчики в бесколлекторных электродвигателях?
- На что влияет количество фаз в бесколлекторном электродвигателе?
- Перечислите основные характеристики контроллеров.
- Какие ошибки при подключении контроллеров возможно допустить?
- К каким последствиям могут привести эти ошибки?
- Перечислите возможные настройки контроллера.
Бесколлекторные двигатели постоянного тока в Нижнем Новгороде: 70-товаров: бесплатная доставка, скидка-50% [перейти]
EMP Электродвигатель бесколлекторный EMP BL3656/04 KV2600 с рубашкой водяного охлаждения (судомодельный) — BL3656_04-2600
ПОДРОБНЕЕЕще цены и похожие товары
 jpeg/300×300″>
jpeg/300×300″>
Бесколлекторный электродвигатель Rimfire 400 28-26-1000 — GPMG4560
ПОДРОБНЕЕЕще цены и похожие товары
28 192
Двигатель постоянного тока (BLDC) 3000W, бесколлекторный с редуктором
ПОДРОБНЕЕЕще цены и похожие товары
11 900
Бесколлекторный электродвигатель Spektrum Firma 1400Kv Brushless Sensored Crawler Motor — SPMXSM3000
ПОДРОБНЕЕЕще цены и похожие товары
Электродвигатель для судомоделей б|к EMP — BL3656|04-2600 Производитель: EMP
ПОДРОБНЕЕЕще цены и похожие товары
 jpeg/300×300″>
jpeg/300×300″>
E-flite Бесколлекторный электродвигатель E-Flite Power 25 1000Kv — EFLM4025C Производитель: E-Flite
ПОДРОБНЕЕЕще цены и похожие товары
Iron Track Бесколлекторный бессенсорный электродвигатель для Iron Track 1/8 — IT-8E103
ПОДРОБНЕЕЕще цены и похожие товары
E-flite Бесколлекторный электродвигатель E-Flite Power BL25 1000Kv — EFLM7300 Производитель: E-Flite
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-mpic/5258494/img_id1061405736057515437.jpeg/300×300″>
mds.yandex.net/get-mpic/5258494/img_id1061405736057515437.jpeg/300×300″>
12 440
Spektrum Бесколлекторный электродвигатель Spektrum Firma 1400Kv Brushless Sensored Crawler Motor — SPMXSM3000
ПОДРОБНЕЕЕще цены и похожие товары
 jpg»>
jpg»>
12 440
Spektrum Бесколлекторный электродвигатель Spektrum Firma 2800Kv Brushless Sensored Crawler Motor — SPMXSM3002
ПОДРОБНЕЕЕще цены и похожие товары
 regmarkets.ru/listpreview/images3/41/46/4146382034f21426df3349cc5d824f36.jpg»>
regmarkets.ru/listpreview/images3/41/46/4146382034f21426df3349cc5d824f36.jpg»>
Высокоэффективный сенсорный Бесколлекторный двигатель 540 17,5 T 1/10 кв для радиоуправляемого автомобиля
ПОДРОБНЕЕЕще цены и похожие товары
25 794
Бесколлекторный двигатель с редуктором FL57BLB76-3644-3.6
ПОДРОБНЕЕЕще цены и похожие товары
E-flite Бесколлекторный электродвигатель E-Flite Power 46 670Kv — EFLM4046A Производитель: E-Flite
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-marketpic/1588068/pic4ef8d2bfa9305129fd5ed3e17fc142a8/300×300″>
mds.yandex.net/get-marketpic/1588068/pic4ef8d2bfa9305129fd5ed3e17fc142a8/300×300″>
10 690
E-flite Бесколлекторный электродвигатель E-Flite Power 60 470Kv — EFLM4060B Производитель: E-Flite
ПОДРОБНЕЕЕще цены и похожие товары
Бесщеточный двигатель постоянного тока Nema 42 0,2 нм 3,7 А, длина 67 мм, радиальные шарикоподшипники для электромобиля
ПОДРОБНЕЕЕще цены и похожие товары
 jpeg/300×300″>
jpeg/300×300″>
2 289
3012
Высокоэффективный сенсорный Бесколлекторный двигатель 540 17,5 T 1/10 кв для радиоуправляемого автомобиля
ПОДРОБНЕЕЕще цены и похожие товары
EMP Электродвигатель бесколлекторный EMP K4465/06 KV1430 для автомоделей — K4465_06-1430
ПОДРОБНЕЕЕще цены и похожие товары
10 690
Бесколлекторный электродвигатель Power 60 BL Outrunner Motor 470Kv Производитель: E-Flite
ПОДРОБНЕЕЕще цены и похожие товары
 jpeg/300×300″>
jpeg/300×300″>
Двигатель бесколлекторный A2204/13T, 1000KV
В МАГАЗИНЕще цены и похожие товары
Двигатель бесколлекторный A2212/13T, 1000KV
В МАГАЗИНЕще цены и похожие товары
TPRO-2415-7T Двигатель бесколлекторный TowerPro 2415-7T
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-mpic/5209894/img_id3862486203091910528.jpeg/300×300″>
mds.yandex.net/get-mpic/5209894/img_id3862486203091910528.jpeg/300×300″>
NTM3536A-1400 Двигатель бесколлекторный NTM Prop Drive Series 35-36A 1400Kv / 550W
ПОДРОБНЕЕЕще цены и похожие товары
E-Sky Электродвигатель бесколлекторный E-Sky (D700) — 003991 Производитель: E-sky
ПОДРОБНЕЕЕще цены и похожие товары
 ru/listpreview/images3/d3/f5/d3f5c24079e1ebd518ae9c64837ba4df.jpg»>
ru/listpreview/images3/d3/f5/d3f5c24079e1ebd518ae9c64837ba4df.jpg»>
Регулятор скорости бесколлекторный 40A DUALSKY (авиамодельный) Производитель: Без бренда
ПОДРОБНЕЕЕще цены и похожие товары
Бессенсорный бесщеточный двигатель SURPASS HOBBY 2000KV 4P для радиоуправляемого грузовика 1/8
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-mpic/4954989/img_id7271506027506502999.jpeg/300×300″>
mds.yandex.net/get-mpic/4954989/img_id7271506027506502999.jpeg/300×300″>
24 077
Новинка 2022, Бесколлекторный двигатель Hobbywing EZRUN 70125SD, 1/5 кВ, для тяжёлого внедорожника
ПОДРОБНЕЕЕще цены и похожие товары
Remo Hobby Бесколлекторный двигатель (3650) 2700KV для моделей 1/10 — E9632-UPG Производитель: Remo
ПОДРОБНЕЕЕще цены и похожие товары
 regmarkets.ru/listpreview/images3/eb/9b/eb9b0b3c8c835e211efd99f9bbc3fa2f.jpg»>
regmarkets.ru/listpreview/images3/eb/9b/eb9b0b3c8c835e211efd99f9bbc3fa2f.jpg»>
550 Коллекторный двигатель 35Т с 60A ESC для 1/10 RC Crawler Axial SCX10 AXI03007 90046 Traxxas TRX4 TRX6 Slash,4
ПОДРОБНЕЕЕще цены и похожие товары
Подшипник шариковый радиальный маховика на автомобили УАЗ, ГАЗ двигатель ЗМЗ 406, 405, 409 Тип:
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-marketpic/1713343/picbf5cbb24fb60a99a60c4b2afb6f4b793/300×300″>
mds.yandex.net/get-marketpic/1713343/picbf5cbb24fb60a99a60c4b2afb6f4b793/300×300″>
825
1399
2212 920KV бесщеточный двигатель с самоблокировкой для DJI F330 F450 F550 модели авиационный двигатель Аксессуары Четыре оси шесть оси
ПОДРОБНЕЕЕще цены и похожие товары
897
1574
2212 920KV бесщеточный двигатель с самоблокировкой для DJI F330 F450 F550 модели авиационный двигатель Аксессуары Четыре оси шесть оси
ПОДРОБНЕЕЕще цены и похожие товары
2212 920Kv Бесщеточный Двигатель CW для F330 F450 F550 Мультикоптер Комплект Рамы Квадрокоптера для Гоночной части FPVЧерный+Серебристый
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-marketpic/1595955/pic9faee202cbdf4ed2090f5910ce2fe331/300×300″>
mds.yandex.net/get-marketpic/1595955/pic9faee202cbdf4ed2090f5910ce2fe331/300×300″>
Регулятор оборотов для бесколлекторных двигателей
ПОДРОБНЕЕЕще цены и похожие товары
Art-Tech Бесколлекторный электродвигатель Art-tech h4D043 для авиамоделей — 41391 Производитель:
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-marketpic/196254/pic1bda16537556844394c46ad094e52c89/300×300″>
mds.yandex.net/get-marketpic/196254/pic1bda16537556844394c46ad094e52c89/300×300″>
Новый бесщеточный двигатель 2312A 800KV для DJI Phantom 3 Professional Advanced 3A 3 P 3S SE Drone CW CCW, запасные части для двигателя
ПОДРОБНЕЕЕще цены и похожие товары
Новый бесщеточный двигатель 2312A 800kv для DJI Phantom 3 Professional Advanced 3A 3 P 3S SE Drone CW CCW, запасные части для двигателя
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-marketpic/1866806/pic95e61ea5ee0abc33611f4fb32ab8a4be/300×300″>
mds.yandex.net/get-marketpic/1866806/pic95e61ea5ee0abc33611f4fb32ab8a4be/300×300″>
Мотор бесколлекторный 2900 оборот/В (RPM/V) для Remo Hobby Производитель: Remo Hobby
ПОДРОБНЕЕЕще цены и похожие товары
Мотор бесколлекторный 2900 оборот/В (RPM/V) для Remo Hobby E9636 Производитель: Remo Hobby
ПОДРОБНЕЕЕще цены и похожие товары
Мотор бесколлекторный 2900 оборот/В (RPM/V) для Remo Hobby Производитель: Remo Hobby
ПОДРОБНЕЕЕще цены и похожие товары
mds.yandex.net/get-marketpic/1663482/pic727024dce568448013d6c13e4416b88f/300×300″>
Многоосевой Бесколлекторный двигатель Tarot 4114 320KV/Orange TL100B08-02, Мультикоптер, запчасти для электронного оборудования
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-mpic/6069165/img_id7729469044359204036.jpeg/300×300″>
mds.yandex.net/get-mpic/6069165/img_id7729469044359204036.jpeg/300×300″>
12 528
14739
Maytech двигатель радиоуправляемого самолета, 8085, 250кв, 170кв, бесколлекторный, 5330 Вт, мощный двигатель для самолета, вертолета
ПОДРОБНЕЕЕще цены и похожие товары
HSP Бесколлекторный двигатель HSP 5500kV (1:18) — 58097 Производитель: HSP
ПОДРОБНЕЕЕще цены и похожие товары
Readytosky 3660 3800KV бесколлекторный мотор
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-marketpic/1105066/pic6465f50782015d2d3ac1f0270a8dfa6d/300×300″>
mds.yandex.net/get-marketpic/1105066/pic6465f50782015d2d3ac1f0270a8dfa6d/300×300″>
46 751
Бесколлекторный двигатель DT80BLF180-3140
ПОДРОБНЕЕЕще цены и похожие товары
856
1259
2212 920KV бесщеточный двигатель с самоблокировкой для DJI F330 F450 F550 модели авиационный двигатель Аксессуары Четыре оси шесть оси
ПОДРОБНЕЕЕще цены и похожие товары
857
1071
2212 920KV бесщеточный двигатель с самоблокировкой для DJI F330 F450 F550 модели авиационный двигатель Аксессуары Четыре оси шесть оси
ПОДРОБНЕЕЕще цены и похожие товары
Spektrum Датчик оборотов бесколлекторного электродвигателя для модуля телеметрии Spektrum — SPMA9558
ПОДРОБНЕЕЕще цены и похожие товары
mds.yandex.net/get-mpic/4949903/img_id1555689510224411735.jpeg/300×300″>
Бесколлекторный двигатель PL57BLM05
ПОДРОБНЕЕЕще цены и похожие товары
2212 920Kv Бесщеточный двигатель CW для F330 F450 F550 Multicopter Quadcopter Frame Kit для FPV Racing Часть черный серебристый
ПОДРОБНЕЕЕще цены и похожие товары
HSP Бесколлекторный двигатель HSP 3000kV (1:8) — 61028 Производитель: HSP
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-mpic/4954989/img_id7271506027506502999.jpeg/300×300″>
mds.yandex.net/get-mpic/4954989/img_id7271506027506502999.jpeg/300×300″>
Мотор бесколлекторный 2900 оборот/В (RPM/V) для Remo Hobby E9636 Производитель: Remo Hobby
ПОДРОБНЕЕЕще цены и похожие товары
Бесколлекторный мотор Park 400 BL 740Kv — EFLM1300 Производитель: Park
ПОДРОБНЕЕЕще цены и похожие товары
HSP Бесколлекторный двигатель HSP 3300KV — 03302 Производитель: HSP
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-mpic/5233681/img_id7825765895946956679.jpeg/300×300″>
mds.yandex.net/get-mpic/5233681/img_id7825765895946956679.jpeg/300×300″>
883
1118
2212 920KV бесщеточный двигатель с самоблокировкой бесщеточный двигатель для DJI Genie F450 F550 бесщеточный мотор аксессуары для дрона
ПОДРОБНЕЕЕще цены и похожие товары
Бесколлекторный мотор A2212 1000KV Производитель: Без бренда
ПОДРОБНЕЕЕще цены и похожие товары
6010 бесщеточный двигатель DJI Дрон двигатель кВ Защита от растений бесщеточный двигатель многоосевой фиксированные крылья UAV мотор с внешним ротором
ПОДРОБНЕЕЕще цены и похожие товары
2 страница из 9
Как работает бесколлекторный двигатель постоянного тока
Добавлено 16 июля 2019 в 22:15
Узнайте обо всех достоинствах бесколлекторных двигателей, а также о преимуществах и недостатках выбора этого типа двигателей для вашего проекта.
Если вы работаете над проектом, в котором есть движущаяся часть, вы, вероятно, будете искать двигатель, чтобы сделать это движение возможным. В этой серии статей мы рассмотрим наиболее популярные типы двигателей, которые используют разработчики. Сначала мы рассмотрели коллекторные двигатели постоянного тока. Теперь давайте посмотрим на их ближайший аналог: бесколлекторный двигатель постоянного тока.
Чтобы узнать, для каких проектов лучше всего подходят бесколлекторные двигатели постоянного тока, ознакомьтесь с обзором:
- Какой тип электродвигателя лучше всего подходит для моего проекта?
Обзор бесколлекторных двигателей постоянного тока
Бесколлекторные двигатели – это новая технология двигателей, быстро внедряемая в высокотехнологичных приборах и электромобилях (например, Tesla Model S) в качестве замены коллекторных двигателей постоянного тока. Они также чрезвычайно распространены в любительских летательных аппаратах, включая многомоторные. Поскольку бесколлекторные двигатели постоянного тока не имеют коллектора и щеток (что очевидно), они работают без многих ограничений коллекторных двигателей постоянного тока.
Поскольку бесколлекторные двигатели постоянного тока не имеют коллектора и щеток (что очевидно), они работают без многих ограничений коллекторных двигателей постоянного тока.
Бесколлекторные двигатели постоянного тока обычно используются в многомоторных летательных аппаратах из-за их высокой скорости и эффективности
Как они работают?
Бесколлекторные двигатели постоянного тока обычно используются в многомоторных летательных аппаратах из-за их высокой скорости и эффективности.
Оценка характеристик бесколлекторных двигателей
Как и коллекторные двигатели постоянного тока, бесколлекторные двигатели работают путем изменения полярности обмоток внутри двигателя. Магнитные поля, создаваемые при возбуждении обмоток, оказывают толкающее воздействие на постоянные магниты, расположенные вокруг внешнего корпуса.
На бесколлекторном двигателе постоянного тока вращается не вал двигателя, а внешний корпус. Поскольку центральный вал, к которому прикреплены обмотки, является неподвижным, питание может подаваться непосредственно на обмотки, что устраняет необходимость в щетках и коллекторе.
Без щеток бесколлекторные двигатели изнашиваются намного менее быстро, чем коллекторные двигатели постоянного тока. Они работают с гораздо меньшим звуковым и электрическим шумом и способны работать на гораздо более высоких скоростях.
Из чего состоит бесколлекторный двигатель постоянного тока
Бесколлекторные двигатели постоянного тока только недавно начали использоваться в потребительских товарах и любительских проектах, потому что их сложно контролировать.
В то время как коллекторные двигатели постоянного тока для изменения полярности обмоток используют просто вращение самого двигателя, бесколлекторные двигатели постоянного тока управляются активно и требуют сложной схемы управления обмоткой, которая также должна масштабироваться при увеличении скорости.
Только благодаря тому, что микроконтроллеры стали дешевле и доступнее, стало возможным, чтобы недорогие системы могли удерживать правильную частоту вращения, необходимую для работы двигателя.
Достоинства бесколлекторных двигателей постоянного тока
Низкий износ
Единственным физическим интерфейсом между вращающейся внешней стороной корпуса двигателя и стационарными обмотками внутри являются шарикоподшипники, что означает, что бесколлекторные двигатели постоянного тока изнашиваются очень медленно.
Высокая скорость
Бесколлекторные двигатели имеют намного меньшее трение, чем коллекторные двигатели постоянного тока, поэтому они могут работать на более высоких скоростях.
Высокая эффективность
По сравнению с другими типами двигателей бесколлекторные двигатели обладают очень высокой эффективностью работы, что означает более низкое энергопотребление при той же выходной мощности по сравнению с коллекторными двигателями постоянного тока.
Недостатки бесколлекторных двигателей постоянного тока
Очень высокая сложность управления
Бесколлекторные двигатели постоянного тока для правильной работы требуют специализированных контроллеров и сложных алгоритмов управления.
Высокая цена
Стоимость самих двигателей не слишком высока, но когда добавляется стоимость контроллера, общая стоимость использования бесколлекторного двигателя постоянного тока в проекте становится относительно высокой.
Необходимость специализированных передач
В таких приложениях, как вакуумные пылесосы Dyson, бесколлекторные двигатели постоянного тока должны быть снабжены передачей для преобразования высоких скоростей до нужной скорости.
Оригинал статьи:
- Scott Hatfield. How a Brushless DC Motor Works
Теги
Бесколлекторный двигательДвигательЭлектродвигатель
Бесколлекторный двигатель — Большая Энциклопедия Нефти и Газа, статья, страница 1
Cтраница 1
Бесколлекторные двигатели с полупроводниковыми коммутаторами, созданные на основе синхронных машин, или так называемые вентильные двигатели, могут стать серьезными конкурентами двигателей постоянного тока с коллекторами.
[1]
Магнитные полюсы бесколлекторного двигателя постоянного тока выполнены из сплава алнико-9. Вал двигателя, в который вмонтирован магнит, представляет собой сложную конструкцию из магнитной и немагнитной нержавеющей сталей. Обмотка статора двухполюсная, трехфазная.
[2]
Поле постоянного магнита бесколлекторного двигателя постоянного тока должно быть устойчивым по отношению ко всем эффектам размагничивания от действия реакции якоря во время работы. Наиболее подходит для этой цели постоянный магнит из сплава алнико-9. Однако материалы типа алнико недостаточно прочны. Поэтому необходима защитная оболочка магнита для сохранения механической целостности при высоких скоростях вращения.
Наиболее подходит для этой цели постоянный магнит из сплава алнико-9. Однако материалы типа алнико недостаточно прочны. Поэтому необходима защитная оболочка магнита для сохранения механической целостности при высоких скоростях вращения.
[3]
Принципиальная функциональная схема бесколлекторного двигателя постоянного тока с коммутатором приведена на рис. 2.10. Эта схема показывает, что бесколлекторный двигатель постоянного тока состоит из электрической части двигателя и коммутатора.
[4]
На установившемся режиме работы бесколлекторный двигатель постоянного тока подобен синхронному двигателю с постоянным возбуждением. Но в отличие от синхронного двигателя скорость вращения бесщеточного двигателя определяется напряжением, подаваемым на клеммы. Скорость вращения практически пропорциональна напряжению.
[5]
Во втором варианте используются бесколлекторные двигатели постоянного тока с управляемыми полупроводниковыми кремниевыми вентилями в качестве коллекторных переключателей. Эта машина конструктивно более сложна, чем асинхронный двигатель.
Эта машина конструктивно более сложна, чем асинхронный двигатель.
[6]
Кроме того, у бесколлекторного двигателя можно значительно увеличить скорость вращения и плотность тока в якоре, что дает возможность увеличить его мощность или уменьшить вес.
[7]
| Принципиальная функциональная схема бесколлекторного двигателя постоянного тока с коммутатором.
[8] |
Рассмотрим электрическую принципиальную схему бесколлекторного двигателя постоянного тока с коммутатором. Датчик положения ротора ДПР состоит из якоря и обоймы. Якорь ДПР закреплен неподвижно на валу двигателя и состоит из сектора магнита с углом 180 и противовеса. Обойма закреплена неподвижно относительно статора и содержит три магниточувствитель-ных элемента — дроссели насыщения, расположенные по внутренней окружности обоймы под углом 120 относительно друг друга. Вне магнитного поля индуктивное сопротивление дросселя максимально. В результате сигнал на соответствующем входе логического устройства минимальный, что соответствует уровню-логического нуля. Дроссель, который находится в магнитном поле якоря ДПР, имеет минимальное сопротивление, что соответствует максимальному значению сигнала или уровню логической единицы на соответствующем входе логического устройства.
В результате сигнал на соответствующем входе логического устройства минимальный, что соответствует уровню-логического нуля. Дроссель, который находится в магнитном поле якоря ДПР, имеет минимальное сопротивление, что соответствует максимальному значению сигнала или уровню логической единицы на соответствующем входе логического устройства.
[9]
| Коллектор на пластмассе.| Принципиальная конструкция коллектора с бандажными кольцами.
[10] |
В последние годы получают распространение бесколлекторные двигатели постоянного тока, в которых механический преобразователь тока — коллектор со щеточным аппаратом — заменен вентильным коммутатором. Вентильные двигатели имеют широкий диапазон регулирования, частоты вращения и-не имеют недостатков, связанных с работой скользящих контактов коллектор-щетки, характерных для коллекторных машин постоянного тока.
[11]
В модели 1975 г применен 6-полюсный бесколлекторный двигатель постоянного тока со встроенным в ие-го датчиком переменного тока для электронного регулирования оборотов. Cie-ма БУД выполнена на 10 транзисторах и двух диодах. Введение этих изменений позволило улучшить качество работы электрофона и обеспечить cia — бильность параметров при серийном производстве. Электроакустические параметры обеих моделей одинаковы.
Cie-ма БУД выполнена на 10 транзисторах и двух диодах. Введение этих изменений позволило улучшить качество работы электрофона и обеспечить cia — бильность параметров при серийном производстве. Электроакустические параметры обеих моделей одинаковы.
[12]
В связи с этими достоинствами бесколлекторных двигателей в нашей стране созданы опытные образцы электроподвижного состава с асинхронными и вентильными тяговыми двигателями.
[13]
| Схема соединений конденсаторного двухфазного двигателя.
[14] |
Применяются два способа создания в бесколлекторных двигателях, питаемых от одной фазы сети, начального пускового момента, в соответствии с чем эти двигатели делятся на двухфазные и однофазные.
[15]
Страницы:
1
2
3
4
Бесколлекторный электродвигатель принцип работы – Tokzamer
Современные бесколлекторные двигатели постоянного тока
Благодаря существенному прогрессу в области полупроводниковой электроники и в технологии создания мощных неодимовых магнитов, широкое распространение получили сегодня бесколлекторные двигатели постоянного тока. Они применяются в стиральных машинах, пылесосах, вентиляторах, дронах и т. д.
Они применяются в стиральных машинах, пылесосах, вентиляторах, дронах и т. д.
И хотя идея касательно принципа работы бесколлекторного двигателя высказывалась еще в начале 19 века, она ждала своего часа до начала полупроводниковой эры, когда технологии стали готовы к практической реализации этой интересной и эффективной концепции, позволившей бесколлекторным двигателям постоянного тока шагать так широко, как это происходит сегодня.
В англоязычной версии двигатели данного типа именуются BLDC motor – Brushless Direct Current Motor — бесщеточный двигатель постоянного тока. Ротор двигателя содержит постоянные магниты, а рабочие обмотки располагаются на статоре, то есть устройство BLDC двигателя полностью противоположно тому, как это имеет место в классическом коллекторном двигателе. Управляется BLDC двигатель электронным регулятором, который называют ESC — Electronic speed controller — электронный регулятор хода.
Электронный регулятор хода и высокий КПД
Электронный регулятор хода позволяет плавно варьировать электрическую мощность, подаваемую на бесколлекторный электродвигатель. В отличие от ранних, более простых версий резистивных регуляторов хода, которые просто ограничивали мощность путем включения в цепь последовательно с двигателем активной нагрузки, превращающей избыточную мощность в тепло, электронный регулятор хода позволяет получить значительно более высокий КПД, не расходуя подводимую электрическую энергию на бесполезный нагрев.
В отличие от ранних, более простых версий резистивных регуляторов хода, которые просто ограничивали мощность путем включения в цепь последовательно с двигателем активной нагрузки, превращающей избыточную мощность в тепло, электронный регулятор хода позволяет получить значительно более высокий КПД, не расходуя подводимую электрическую энергию на бесполезный нагрев.
Бесколлекторный двигатель постоянного тока можно классифицировать как самосинхронизируемый синхронный двигатель, в котором полностью исключен искрящий узел, требующий регулярного обслуживания — коллектор. Функцию коллектора несет на себе электроника, благодаря чему вся конструкция изделия сильно упрощается и становится компактнее.
Щетки заменены, по сути, на электронные ключи, потери в которых сильно меньше чем были бы при механической коммутации. Мощные неодимовые магниты на роторе позволяют добиться большего момента на валу. И греется такой двигатель меньше нежели его коллекторный предшественник.
В итоге КПД двигателя получается наилучшим, а показатели мощности на килограмм веса — выше, плюс достаточно широкий диапазон регулировки скорости вращения ротора и практически полное отсутствие генерируемых радиопомех. Конструктивно двигатели данного типа легко адаптируются для эксплуатации в воде и в агрессивных средах.
Конструктивно двигатели данного типа легко адаптируются для эксплуатации в воде и в агрессивных средах.
Электронный блок управления — очень важная и дорогостоящая часть бесколлекторного двигателя постоянного тока, без которой, однако, никак не обойтись. От данного блока двигатель получает питание, параметры которого одновременно влияют и на скорость, и на мощность, которую двигатель будет в состоянии развить под нагрузкой.
Даже если скорость вращения регулировать не нужно, все равно электронный блок управления необходим, ведь он несет на себе не только функцию управления, но также имеет силовую составляющую. Можно сказать, что ESC – это аналог частотного регулятора для асинхронных двигателей переменного тока, специально предназначенный для питания и управления бесколлекторным двигателем постоянного тока.
Управление двигателем BLDC
Чтобы понять как происходит управление BLDC двигателем, сначала вспомним как работает коллекторный двигатель. В его основе принцип вращения рамки с током в магнитном поле.
Каждый раз, когда рамка с током повернулась и нашла положение равновесия, коммутатор (щетки прижатые к коллектору) изменяет направление тока через рамку, и рамка движется дальше. Этот процесс повторяется при движении рамки от полюса к полюсу. Только вот в коллекторном двигателе таких рамок много и магнитных полюсов несколько пар, поэтому коллекторно-щеточный узел содержит не два контакта, а много.
Электронный блок управления бесколлекторным двигателем делает то же самое. Он изменяет полярность магнитного поля как только ротор необходимо провернуть дальше из положения равновесия. Только управляющее напряжение подается не на ротор, а на обмотки статора, и делается это при помощи полупроводниковых ключей в нужные моменты времени (фазы ротора).
Очевидно, что ток на обмотки статора бесколлекторного двигателя необходимо подавать в правильные моменты времени, то есть тогда, когда ротор находится в определенном известном положении. Для этого применяется один из следующих методов. Первый — на основе датчика положения ротора, второй — путем измерения ЭДС на одной из обмоток, которая в данный момент не получает питание.
Первый — на основе датчика положения ротора, второй — путем измерения ЭДС на одной из обмоток, которая в данный момент не получает питание.
Датчики бывают разными, магнитными и оптическими, наиболее популярны магнитные датчики на основе эффекта Холла. Второй способ (на основе измерения ЭДС) хотя и эффективен, однако он не позволяет осуществлять точное управление на низких скоростях и при старте. А вот датчики Холла обеспечивают возможность более точного управления во всех режимах. В трехфазных BLDC двигателях таких датчиков три штуки.
Двигатели без датчиков положения ротора применимы в тех случаях, когда старт двигателя происходит без нагрузки на валу (вентилятор, пропеллер и т. п.). Если же старт происходит под нагрузкой, необходим двигатель с датчиками положения ротора. В том и в другом варианте есть свои плюсы и минусы.
Решение с датчиком оборачивается более удобным управлением, но при выходе из строя хотя бы одного из датчиков, двигатель придется разбирать, к тому же датчики требуют отдельных проводов. В варианте без датчика нет надобности в специальных проводах, но во время старта ротор будет раскачиваться туда-сюда. Если это недопустимо, необходимо ставить в систему датчики.
В варианте без датчика нет надобности в специальных проводах, но во время старта ротор будет раскачиваться туда-сюда. Если это недопустимо, необходимо ставить в систему датчики.
Ротор и статор, количество фаз
Ротор BLDC двигателя может быть наружным или внутренним, а статор, соответственно, внутренним или наружным. Статор изготавливают из магнитопроводящего материала, с количеством зубцов, которое нацело делится на количество фаз. Ротор может быть изготовлен необязательно из магнитопроводящего материала, но обязательно с жестко зафиксированными на нем магнитами.
Чем сильнее магниты — тем выше доступный вращающий момент. Количество зубцов статора не обязательно должно быть равно количеству магнитов на роторе. Минимальное количество зубцов равно количеству фаз управления.
Большинство современных бесколлекторных двигателей постоянного тока — трехфазные, просто в силу простоты такой конструкции и способа управления ею. Как и в асинхронных двигателях переменного тока, обмотки трех фаз соединяются здесь на статор «треугольником» либо «звездой».
Такие двигатели без датчиков положения ротора имеют 3 питающих провода, а двигатели с датчиками — 8 проводов: дополнительные два провода — для питания датчиков и три — сигнальные выводы датчиков.
Обмотка статора выполняется изолированным медным проводом так, чтобы сформировать магнитные полюса необходимого количества фаз, равномерно распределенные по окружности ротора. Количество отдельно стоящих полюсов на статоре для каждой фазы выбирается исходя из требуемой скорости вращения двигателя (и вращающего момента).
Низкооборотные двигатели с наружным ротором делают с большим количеством полюсов (и соответственно зубцов) на каждую фазу, чтобы получить вращение с угловой частотой значительно меньше частоты управляющего тока. Но даже в высокооборотных трехфазных двигателях обычно не применяют количество зубцов меньше 9.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Что такое бесколлекторный двигатель постоянного тока и его принцип работы
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Рис. 2. Устройство бесколлекторного двигателя
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
Рис. 3. Конструкция с внешним якорем (outrunner)
Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
Бесколлекторный двигатель в компьютерном дисководе
Принцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
Наглядно этот процесс продемонстрирован на рисунке 4.
Фазы работы бесколлекторного привода
Как видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.

- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Рисунок 7. Диаграммы напряжений БД
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
 Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Бесщеточный двигатель принцип работы
Как устроен бесщеточный двигатель
Работа бесщеточного электродвигателя основывается на электрических приводах, создающих магнитное вращающееся поле.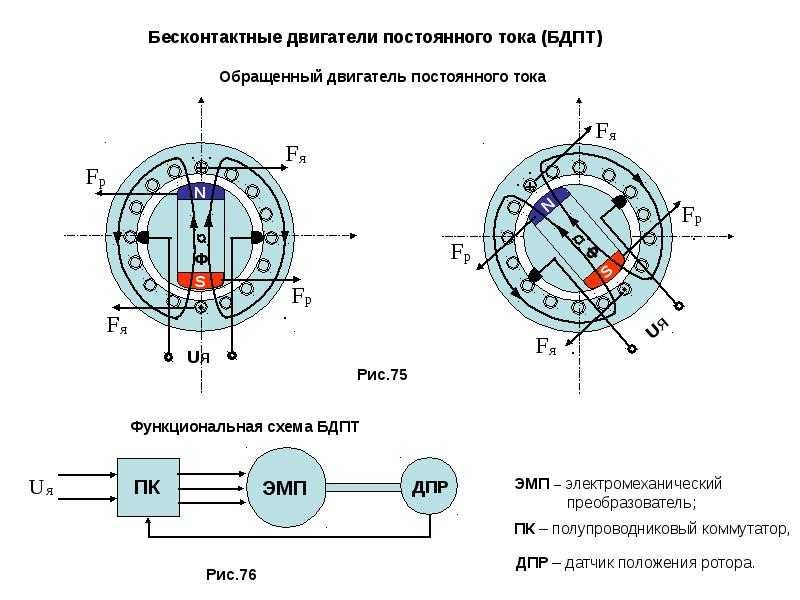
В настоящее время существует несколько типов устройств, имеющих различные характеристики.
С развитием технологий и использованием новых материалов, отличающихся высокой коэрцитивной силой и достаточным уровнем магнитного насыщения, стало возможным получение сильного магнитного поля и, как следствие, вентильных конструкций нового вида, в которых отсутствует обмотка на роторных элементах или стартере.
Обширное распространение переключателей полупроводникового типа с высокой мощностью и приемлемой стоимостью ускорило создание подобных конструкций, облегчило исполнение и избавило от множества сложностей с коммутацией.
Использование
Бесщеточный двигатель постоянного тока с постоянными магнитами встречается в основном в устройствах с мощностью в пределах 5 кВт.
В более мощной аппаратуре их применение нерационально.
Магниты в двигателях данного типа отличаются особой чувствительностью к высоким температурам и сильным полям.
Двигатели активно используются в электрических мотоциклах, автомобильных приводах благодаря отсутствию трения в коллекторе.
Описание и принцип работы
Бесщеточный (бесколлекторный) двигатель постоянного тока очень похож на двигатель постоянного тока с постоянными магнитами, но не имеет щеток для замены или износа из-за искрения коммутатора.
Поэтому в роторе выделяется мало тепла, что увеличивает срок службы двигателей.
Конструкция бесщеточного двигателя устраняет необходимость в щетках благодаря более сложной схеме привода, в которой магнитное поле ротора является постоянным магнитом, который всегда синхронизирован с полем статора, что позволяет более точно контролировать скорость и крутящий момент.
Управление бесщеточными двигателями постоянного тока очень отличается от обычного щеточного двигателя постоянного тока тем, что этот тип двигателя включает в себя некоторые средства для определения углового положения роторов (или магнитных полюсов), необходимые для получения сигналов обратной связи, необходимых для управления переключением полупроводников. Появление процессорной техники и силовых транзисторов позволило конструкторам отказаться от узла механической коммутации и изменить роль ротора и статора в электромоторе постоянного тока.
Принцип работы БДКП
В бесколлекторном электродвигателе роль механического коммутатора выполняет электронный преобразователь. Это позволяет осуществить «вывернутая наизнанку» схема БДКП — его обмотки расположены на статоре, что исключает необходимость в коллекторе.
Иными словами, основное принципиальное различие между классическим двигателем и БДКП в том, что вместо стационарных магнитов и вращающихся катушек последний состоит из неподвижных обмоток и вращающихся магнитов. Несмотря на то что сама коммутация в нём происходит похожим образом, её физическая реализация в бесщёточных приводах гораздо более сложна.
Как работает коллекторная машина
Чтобы произвести запуск коллекторного двигателя, потребуется подать напряжение на обмотку возбуждения, которая расположена непосредственно на якоре. При этом образуется постоянное магнитное поле, которое взаимодействует с магнитами на статоре, в результате чего проворачиваются якорь и коллектор, закрепленный на нём. При этом подается питание на следующую обмотку, происходит повтор цикла.
При этом подается питание на следующую обмотку, происходит повтор цикла.
Как осуществляется управление
Электронный блок управления позволяет провести коммутацию обмоток привода. Для определения момента переключения при помощи драйвера отслеживается положение ротора по датчику Холла, установленном на приводе.
В том случае, если нет таких устройств, необходимо считывать обратное напряжение.
Оно генерируется в катушках статора, не подключенных на данный момент времени.
Контроллер — это аппаратно-программный комплекс, он позволяет отслеживать все изменения и максимально точно задавать порядок коммутации.
Трехфазные бесколлекторные электродвигатели
Очень много бесколлекторных электродвигателей для авиамоделей выполняется под питание постоянным током.
Но существуют и трехфазные экземпляры, в которых устанавливаются преобразователи.
Они позволяют из постоянного напряжения сделать трехфазные импульсы.
Работа происходит следующим образом:
- На катушку «А» поступают импульсы с положительным значением. На катушку «В» — с отрицательным значением. В результате этого якорь начнет двигаться. Датчики фиксируют смещение и подаётся сигнал на контроллер для осуществления следующей коммутации.
- Происходит отключение катушки «А», при этом импульс положительного значения поступает на обмотку «С». Коммутация обмотки «В» не претерпевает изменений.
- На катушку «С» попадается положительный импульс, а отрицательный поступает на «А».
- Затем вступает в работу пара «А» и «В». На них и подаются положительные отрицательные значения импульсов соответственно.
- Затем положительный импульс опять поступает на катушку «В», а отрицательный на «С».
- На последнем этапе происходит включение катушки «А», на которую поступает положительный импульс, и отрицательный идет к С.
 На катушку «В» — с отрицательным значением. В результате этого якорь начнет двигаться. Датчики фиксируют смещение и подаётся сигнал на контроллер для осуществления следующей коммутации.
На катушку «В» — с отрицательным значением. В результате этого якорь начнет двигаться. Датчики фиксируют смещение и подаётся сигнал на контроллер для осуществления следующей коммутации.И после этого происходит повтор всего цикла.
Преимущества использования
Изготовить своими руками бесколлекторный электродвигатель сложно, а реализовать микроконтроллерное управление практически невозможно. Поэтому лучше всего использовать готовые промышленные образцы.
Поэтому лучше всего использовать готовые промышленные образцы.
Но обязательно учитывайте достоинства, которые получает привод при использовании бесколлекторных электродвигателей:
- Существенно больший ресурс, нежели у коллекторных машин.
- Высокий уровень КПД.
- Мощность выше, нежели у коллекторных моторов.
- Скорость вращения набирается намного быстрее.
- Во время работы не образуются искры, поэтому их можно использовать в условиях с высокой пожарной опасностью.
- Очень простая эксплуатация привода.
- При работе не нужно использовать дополнительные компоненты для охлаждения.
«Бесколлекторные двигатели» ЛикБез и проектирование
Принцип работы электрического двигателя:
В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера, которая создаст вращательный момент. Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
Устройство электрического двигателя:
Любой электрический двигатель состоит из неподвижной части — Статора и подвижной части — Ротора. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор (щетки).
Бесколлекторный двигатель — это двигатель ПОСТОЯННОГО ТОКА без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от «порций» коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)
Устройство бесколлекторного двигателя:
Inrunner (произносится как «инраннер»). Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Outrunner (произносится как «аутраннер»). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами.
Принцип работы:
Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:
Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.
Что бы измерить это напряжение изпользуется метод «виртуальной точки». Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально «переложить провод» в место соединения всех обмоток:
Регулятор скорости бесколлекторного двигателя:
Бесколлекторный двигатель без электроники — просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости — это довольно сложная система радиокомпонентов, т.к. она должна:
1) Определять начальное положение ротора для запуска электродвигателя
2) Управлять электродвигателем на низких скоростях
3) Разгонять электродвигатель до номинальной (заданной) скорости вращения
4) Поддерживать максимальный момент вращения
Принципиальная схема регулятора скорости (вентильная):
Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать. И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).
И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Разобравшись с теорией, перейдем к практике: спроектируем и сделаем двигатель для пилотажной модели МХ-2.
Список материалов и оборудования:
1) Проволока (взятая из старых трансформаторов)
2) Магниты (купленные в интернете)
3) Статор (барашек)
4) Вал
5) Подшипники
6) Дюралюминий
7) Термоусадка
8) Доспуп к неограниченному техническому хламу
9) Доступ к инструментам
10) Прямые руки 🙂
Ход работы:
1) С самого начала решаем:
Для чего делаем двигатель?
На что он должен быть рассчитан?
В чем мы ограничены?
В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.
Нашел я её в старой видеоголовке от видеорекоудора.
2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя. Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения:
1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм
3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
10А — 0.25мм; 30А — 0.55мм; 60А — 0.95мм
3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение.
4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1. 73 раз. (впоследствии было выбрано соединение треугольник)
73 раз. (впоследствии было выбрано соединение треугольник)
5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея.
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.
Чтобы увидеть отличия соединений «звезда» и «треугольник» я соединял по разному обмотки:
В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм.
Характеристики полученного двигателя:
Потребляемый ток: 34.1А
Ток холостого хода: 2. 1А
1А
Сопротивление обмоток: 0.02 Ом
Количество полюсов: 14
Обороты: 8400 об/мин
Расчет КПД двигателя:
Очень хороший показатель. Хотя можно было еще выше добиться.
Выводы:
1) У бесколлекторных двигателей высокая эффективность и КПД
2) Бесколлекторные двигатели компактны
3) Бесколлекторные двигатели можно использовать во взрывоопасных средах
4) Соединение звездой дает больший крутящий момент, но меньшее количество оборотов в 1.73 раза, чем соединение треугольником.
Таким образом, изготовить собственный бесколлекторный мотор для пилотажной модели самолета- задача выполнимая
Если у вас есть вопросы или вам что-то не понятно, задавайте мне вопросы в комметариях этой статьи. Удачи всем)
Бесколлекторный двигатель постоянного тока
Бесколлкторные двигатели постоянного тока (бдпт) являются разновидностью синхронных двигателей с постоянными магнитами, которые питаются от цепи постоянного тока через инвертор, управляемый контроллером с обратной связью. Контроллер подаёт на фазы двигателя напряжения и токи, необходимые для создания требуемого момента и работы с нужной скоростью. Такой контроллер заменяет щёточно-коллекторный узел, используемый в коллекторных двигателях постоянного тока. Бесколлекторные двигатели могут работать как с напряжениями на обмотках в форме чистой синусоиды, так и кусочно-ступенчатой формы (например, при блочной коммутации).
Контроллер подаёт на фазы двигателя напряжения и токи, необходимые для создания требуемого момента и работы с нужной скоростью. Такой контроллер заменяет щёточно-коллекторный узел, используемый в коллекторных двигателях постоянного тока. Бесколлекторные двигатели могут работать как с напряжениями на обмотках в форме чистой синусоиды, так и кусочно-ступенчатой формы (например, при блочной коммутации).
Появились бесколлекторные двигатели постоянного тока как попытка избавить коллекторные двигатели постоянного тока с постоянными магнитами от их слабого места – щёточно-коллекторного узла. Этот узел, представляющий собой вращающийся электрический контакт, является слабым местом у коллекторных двигателей с точки зрения надёжности и в ряде случаев ограничивает их параметры.
Принцип работы и устройство бесколлекторного двигателя
Как и остальные двигатели, бесколлекторный двигатель состоит из двух основных частей – ротора (подвижная часть) и статора (неподвижная часть). На статоре располагается трёхфазная обмотка. Ротор несёт на себе постоянный магнит, который может иметь одну или несколько пар полюсов. Когда к обмотке статора приложена трёхфазная система напряжений, то обмотка создаёт вращающееся магнитное поле. Оно взаимодействует с постоянным магнитом на роторе и приводит его в движение. По мере того как ротор поворачивается, вектор его магнитного поля проворачивается по направлению к магнитному полю статора. Управляющая электроника отслеживает направление, которое имеет магнитное поле ротора и изменяет напряжения, приложенные к обмотке статора, таким образом чтобы магнитное поле, создаваемое обмотками статора, повернулось, опережая магнитное поле ротора. Для определения направления магнитного поля ротора используется датчик положения ротора, поскольку магнит, создающий это поле жёстко закреплён на роторе. Напряжения на обмотках бесколлекторного двигателя можно формировать различными способами: простое переключение обмоток через каждые 60° поворота ротора или формирование напряжений синусоидальной формы при помощи широтно-импульсной модуляции.
На статоре располагается трёхфазная обмотка. Ротор несёт на себе постоянный магнит, который может иметь одну или несколько пар полюсов. Когда к обмотке статора приложена трёхфазная система напряжений, то обмотка создаёт вращающееся магнитное поле. Оно взаимодействует с постоянным магнитом на роторе и приводит его в движение. По мере того как ротор поворачивается, вектор его магнитного поля проворачивается по направлению к магнитному полю статора. Управляющая электроника отслеживает направление, которое имеет магнитное поле ротора и изменяет напряжения, приложенные к обмотке статора, таким образом чтобы магнитное поле, создаваемое обмотками статора, повернулось, опережая магнитное поле ротора. Для определения направления магнитного поля ротора используется датчик положения ротора, поскольку магнит, создающий это поле жёстко закреплён на роторе. Напряжения на обмотках бесколлекторного двигателя можно формировать различными способами: простое переключение обмоток через каждые 60° поворота ротора или формирование напряжений синусоидальной формы при помощи широтно-импульсной модуляции.
Варианты конструкции двигателя
Обмотка двигателя может иметь различную конструкцию. Обмотка классической конструкции наматывается на стальной сердечник. Другой вариант конструкции обмотки – это обмотка без стального сердечника. Проводники этой обмотки равномерно распределяются вдоль окружности статора. Характеристики обмотки получаются различными, что отражается и на характеристиках двигателя. Кроме того, обмотки могут быть выполнены на различное число фаз и с различным количеством пар полюсов.
Бесколлекторные двигатели также могут иметь конструкции, различающиеся по взаимному расположению ротора и статора. Наиболее распространена конструкция, когда ротор охватывается статором снаружи – двигатели с внутренним ротором. Но также возможна, и встречается на практике конструкция в которой ротор расположен снаружи статора – двигатели с внешним ротором. Третий вариант – статор расположен параллельно ротору и оба располагаются перпендикулярно оси вращения двигателя. Такие двигатели называют двигателями аксиальной конструкции.
Датчик положения, который измеряет угловое положение ротора двигателя — это важная часть приводной системы, построенной на бесколлекторном двигателе. Этот датчик может быть самым разным как по типу, так и по принципу действия. Традиционно используемый для этой цели тип датчиков – датчики Холла с логическим выходом, устанавливаемые на каждую фазу двигателя. Выходные сигналы этих датчиков позволяют определить положение ротора с точностью до 60° — достаточной реализации самых простых способов управления обмотками. Для реализации способов управления двигателем, предполагающих формирование на обмотках двигателя системы синусоидальных напряжений при помощи ШИМ необходим более точный датчик, например, энкодер. Инкрементные энкодеры, очень широко используемые в современном электроприводе, могут обеспечить достаточно информации о положении ротора только при использовании их вместе с датчиками Холла. Если бесколлекторный двигатель оснащён абсолютным датчиком положения – абсолютным энкодером или резольвером (СКВТ), то датчики Холла становятся не нужны, так как любой из этих датчиков обеспечивает полную информацию о положении ротора.
Можно управлять бесколлекторным двигателем, и не используя датчика положения ротора – бездатчиковая коммутация. В этом случае информация о положении ротора восстанавливается на основании показаний других датчиков, например, датчиков фазных токов двигателя или датчиков напряжения. Такой способ управления часто влечёт за собой ряд недостатков (ограниченный диапазон скоростей, высокая чувствительность к параметрам двигателя, специальная процедура старта), что ограничивает его распространение.
Преимущества и недостатки
Высокая надёжность вследствие отсутствия коллектора. Это основное отличие бесколлекторных двигателей от коллекторных. Щёточно-коллекторный узел, является подвижным электрическим контактом и сам по себе имеет невысокую надёжность и устойчивость к влиянию различных воздействий со стороны окружающей среды.
Отсутствие необходимости обслуживания коллекторного узла . Является особенно актуальным для двигателей среднего и крупного габарита. Для микроэлектродвигателей, проведение ремонта экономически оправдано далеко не во всех случаях, поэтому для них этот пункт не является актуальным.
Для микроэлектродвигателей, проведение ремонта экономически оправдано далеко не во всех случаях, поэтому для них этот пункт не является актуальным.
Сложная схема управления. Прямое следствие переноса функции переключения токов обмотки во внешний коммутатор. Если в простейшем случае для управления коллекторным двигателем необходимо иметь только источник питания, то для бесколлекторного двигателя такой подход не работает – контроллер нужен даже для решения самых простых задач управления движением. Однако, когда речь идёт о решении для сложных случаев (например, задачи позиционирования), то контроллер становится необходим для всех типов двигателей.
Высокая скорость вращения. В коллекторных двигателях скорость перемещения щётки по коллектору ограничена, хотя и различна для различных конструкций этих двух деталей и различных используемых материалов. Предельная скорость перемещения щёток по коллектору сильно ограничивает скорость вращения коллекторных двигателей. Бесколлекторные двигатели не имеют такого ограничения, что позволяет выполнять их для работы на скоростях до нескольких сотен тысяч оборотов в минуту – цифра недостижимая для коллекторных двигателей.
Бесколлекторные двигатели не имеют такого ограничения, что позволяет выполнять их для работы на скоростях до нескольких сотен тысяч оборотов в минуту – цифра недостижимая для коллекторных двигателей.
Большая удельная мощность. Возможность достичь большой удельной мощности является следствием высокой скорости вращения, доступной для бесколлекторного двигателя.
Хороший отвод тепла от обмотки. Обмотка бесколлекторных двигателей неподвижно закреплена на статоре и есть возможность обеспечить хороший тепловой контакт её с корпусом, который передаёт тепло, выделяемое в двигателе, в окружающую среду. У коллекторного двигателя обмотка установлена на роторе, и её тепловой контакт с корпусом гораздо хуже, чем у бесколлекторного двигателя.
Больше проводов для подключения. Когда двигатель расположен близко от контроллера, то это конечно не повод для огорчения. Однако если условия окружающей среды, в которых работает двигатель очень сложны, то вынесение управляющей электроники на значительное расстояние (десятки и сотни метров) от двигателя является подчас единственным доступным вариантом для разработчиков системы. В таких условиях каждая дополнительная цепь для подключения двигателя, будет требовать дополнительных жил в кабеле, увеличивая его размеры и массу.
В таких условиях каждая дополнительная цепь для подключения двигателя, будет требовать дополнительных жил в кабеле, увеличивая его размеры и массу.
Уменьшение электромагнитных помех, исходящих от двигателя . Щёточно-коллекторный контакт создаёт при работе достаточно сильные помехи. Частота этих помех зависит от частоты вращения двигателя, что осложняет борьбу с ними. У бесколлекторного двигателя единственным источником помех является ШИМ силовых ключей, частота которого обычно постоянна.
Присутствие сложных электронных компонентов. Электронные компоненты (датчики Холла, например) более остальных составных частей двигателя уязвимы для действия жёстких условий со стороны внешней среды, будь то высокая температура, низкая температура или ионизирующие излучения. Коллекторные двигатели не содержат электроники и у них подобная уязвимость отсутствует.
Где применяются бесколлекторные двигатели
К настоящему времени бесколлекторные двигатели получили широкое распространение, как благодаря своей высокой надёжности, высокой удельной мощности и возможности работать на высокой скорости, так и из-за быстрого развития полупроводниковой техники, сделавшей доступными мощные и компактные контроллеры для управления этими двигателями.
Бесколлекторные двигатели широко применяются в тех системах где их характеристики дают им преимущество перед двигателями других типов. Например, там, где требуется скорость вращения несколько десятков тысяч оборотов в минуту. Если от изделия требуется большой срок службы, а ремонт невозможен или ограничен из-за особенностей эксплуатации изделия, то и тогда бесколлекторный двигатель будет хорошим выбором.
Что такое бесколлекторный двигатель постоянного тока, как он устроен и работает
Определение
Бесколлекторным называют электродвигатель постоянного тока, ток в обмотках которого переключает специальное устройство-коммутатор — он носит название «драйвер» или «инвертор» и эти обмотки всегда расположены на статоре. Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора.
В отечественной литературе такие двигатели называют «вентильными» (потому что полупроводниковые ключи называют «вентилями»), и есть разделение таких электромашин на два вида по форме противо—ЭДС. В зарубежной литературе такое различие сохраняется, один из них называют аналогично русскому «BLDC» (brushless direct current drive или motor), что в дословном переводе звучит как «бесщёточный двигатель постоянного тока» в их обмотках возникает трапецеидальная ЭДС. Вентильные же электродвигатели с синусоидальной ЭДС называют PMSM (Permanent magnet synchronous machine), что переводится как «синхронный электродвигатель с возбуждением постоянными магнитами».
В зарубежной литературе такое различие сохраняется, один из них называют аналогично русскому «BLDC» (brushless direct current drive или motor), что в дословном переводе звучит как «бесщёточный двигатель постоянного тока» в их обмотках возникает трапецеидальная ЭДС. Вентильные же электродвигатели с синусоидальной ЭДС называют PMSM (Permanent magnet synchronous machine), что переводится как «синхронный электродвигатель с возбуждением постоянными магнитами».
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
На этом и основан принцип работы любого электродвигателя.
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.
Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.
Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.
В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер «знал», в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.
В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.
Виды БДПТ
Теперь давайте разберемся, какими бывают бесколлекторные двигатели на постоянных магнитах. Их классифицируют по форме противо-ЭДС, конструкции, а также по наличию датчиков положения ротора. Итак, два основных типа отличающихся формой противо-ЭДС, которая наводится в обмотках при вращении ротора:
- BLDC — в них трапецеидальная противо-ЭДС;
- PMSM — противо-ЭДС синусоидальная.

В идеальном случае для них нужны разные источники питания (контроллеры), но на практике они взаимозаменяемы. Но если использовать контроллер с прямоугольными или трапецеидальным выходным напряжением с PMSM-двигателем, то будут слышны характерные звуки, похожие на стук во время вращения.
А по конструкции бесколлекторные двигатели постоянного тока бывают:
- С внутренним ротором. Это более привычное представление электродвигателя, когда статор — это корпус, а вращается вал, расположенный в нём. Часто их называют английским словом «Inrunner». Такой вариант обычно применяют для высокооборотистых электродвигателей
- С внешним ротором. Здесь вращается внешняя часть двигателя с закреплённым на ней валом, в англоязычных источниках его называют «outrunner». Эту схему устройства используют, когда нужен высокий момент.
Выбирают конструкцию в зависимости от того для чего нужен бесколлекторный двигатель в конкретном применении.
Современная промышленность выпускает бесколлекторные двигатели как с датчиками положения ротора, так и без них. Дело в том, что существует множество способов управления БДПТ, для некоторых из них нужны датчики положения, другие определяют положения по ЭДС в обмотках, третьи и вовсе просто подают питание на нужные фазы и электродвигатель самостоятельно синхронизируется с таким питанием и входит в рабочий режим.
Дело в том, что существует множество способов управления БДПТ, для некоторых из них нужны датчики положения, другие определяют положения по ЭДС в обмотках, третьи и вовсе просто подают питание на нужные фазы и электродвигатель самостоятельно синхронизируется с таким питанием и входит в рабочий режим.
Основные характеристики бесколлекторных двигателей постоянного тока:
- Режим работы — длительный или кратковременный.
- Максимальное рабочее напряжение.
- Максимальный рабочий ток.
- Максимальная мощность.
- Максимальные обороты, часто указывают не обороты, а KV — об/в, то есть количество оборотов на 1 вольт приложенного напряжения (без нагрузки на валу). Чтобы получить максимальные обороты — умножьте это число на максимальное напряжение.
- Сопротивление обмотки (чем оно меньше, тем выше КПД), обычно составляет сотые и тысячные доли Ома.
- Угол опережения фазы (timing) — время, через которое ток в обмотке достигнет своего максимума, это связано с её индуктивностью и законами коммутации (ток в индуктивности не может измениться мгновенно.
Схема подключения
Как было сказано выше, для работы бесколлекторного двигателя нужен специальный контроллер. На алиэкспресс можно найти как комплекты из двигателя и контроллера, так и по отдельности. Контроллер также называют ESC Motor или Electric Speed Controller. Выбирают их по силе тока, отдаваемого в нагрузку.
Обычно подключение электродвигателя к контроллеру не вызывает затруднений и понятно даже для чайников. Главное, что нужно знать — для смены направления вращения нужно изменить подключение любых двух фаз, собственно также, как и в трёхфазных асинхронных или синхронных электродвигателях.
В сети есть и ряд технических решений и схем как сложных, так и для чайников, которые вы можете увидеть ниже.
В этом видеоролике автор рассказывает, как подружить БК моторчик с «ардуиной».
А в этом ролике вы узнаете о различных способах подключения к разным регуляторам и как его можно сделать своими руками. Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
Кстати схему из видео для повторения также прикладываем:
Где применяются бесколлекторные двигатели
Сфера применения таких электродвигателей досрочно широка. Они используются как для привода мелких механизмов: в дисководах CD, DVD-приводах, жёстких дисках, так и в мощных устройствах: аккумуляторе и сетевом электроинструменте (с питанием порядка 12В), радиоуправляемых моделях (например, квадрокоптерах), станках ЧПУ для привода рабочего органа (обычно моторчики с номинальным напряжением 24В или 48В).
Широкое применение БДПТ нашли в электротранспорте, почти все современные мотор-колеса электросамокатов, велосипедов, мотоциклов и автомобилей — это бесколлекторные двигатели. К слову, номинальное напряжение электродвигателей для транспорта лежит в широком пределе, например, мотор-колесо для велосипеда зачастую работает от 36В или от 48В, за редким исключением и больше, а в автомобилях, например, на Toyota Prius порядка 120В, а на Nissan Leaf – доходит до 400, при том что заряжается от сети 220В (это реализуется с помощью встроенного преобразователя).
На самом деле область применения бесколлекторных электродвигателей очень обширна, отсутствие коллекторного узла позволяет его применять опасных местах, а также в местах с повышенной влажностью, без опасений замыканий, искрения или возгорания из-за дефектов в щеточном узле. Благодаря высокому КПД и хорошим массогабаритным показателям они нашли применение и в космической промышленности.
Преимущества и недостатки
Бесколлекторным двигателям постоянного тока, как и другим видам электромашин, присущи определенные достоинства и недостатки.
Преимущества у БДПТ заключаются в следующем:
- Благодаря возбуждению мощными постоянными магнитами (неодимовыми, например) превосходят по моменту и мощности и имеют меньшие габариты, чем асинхронные двигатели. Чем пользуется большинство производителей электротранспорта — от самокатов до автомобилей.
- Нет искрящего щеточно-коллекторного узла, который требует регулярного обслуживания.
- При использовании качественного контроллера в отличие от того же КД не выдают помехи в питающую сеть, что особенно важно в радиоуправляемых устройствах и транспорте с развитым электронным оборудованием в бортовой сети.
- КПД более 80, чаще и 90%.
- Высокая скорость вращения, в отдельных случаях до 100000 об/мин.

Но есть и существенный минус: бесколлекторный двигатель без контроллера — просто кусок железа с медной обмоткой. Он никак не сможет работать. Контроллеры стоят недешево и чаще всего их приходится заказывать в интернет-магазинах или с алиэкспресс. Из-за этого использовать БК-моторы в моделях и устройствах домашнего производства не всегда возможно.
Теперь вы знаете, что такое бесколлекторный двигатель постоянного тока, как он работает и где применяется. Надеемся, наша статья помогла вам разобраться во всех вопросах!
Бесколлекторные двигатели BLDC
Бесколлекторные двигатели постоянного тока, их также могут называть бесщеточными, вентильными, BLDC или BLDCM (Brushless Direct Current Motor), PMS или PMSM (Permanent Magnet Synchronous Motor).
Представляют собой синхронные двигатели постоянного тока с автоматической синхронизацией, обычно синхронизация достигается за счет установленных датчиков положения ротора, чаще всего для этого используют датчики Холла.
Данный тип двигателей не имеют коллектора — обмотки двигателя находяться на статоре, а на роторе установлены постоянные магниты (обычно неодимовые). Роль коллектора выполняет контроллер, без которого такие двигатели работать не будут.
Отсутствие коллектора сильно упрощает конструкцию двигателя и позволяет добиться ряда преимуществ перед остальными типами:
- Высокий КПД
- Широкий диапазон оборотов
- Большой крутящий момент
- Компактные размеры и малый вес
У нас вы можете купить бесколлекторные двигатели и контроллеры от компании Wantai Motors.
| Обороты | Крутящий момент | Цена | |||
|---|---|---|---|---|---|
| Бесколлекторный двигатель 42BLF01 | 4000 об/мин | 0. 063 Н·м 063 Н·м | 3 700 ₽ | Временно нет в наличии | |
| Бесколлекторный двигатель 42BLF02 | 4000 об/мин | 0.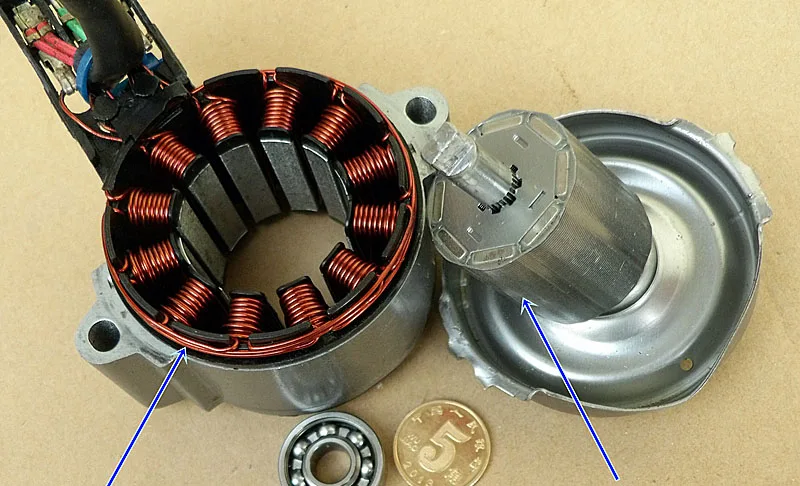 125 Н·м 125 Н·м | 3 900 ₽ | Временно нет в наличии | |
| Бесколлекторный двигатель 42BLF03 | 4000 об/мин | 0. 188 Н·м 188 Н·м | 4 150 ₽ | Временно нет в наличии | |
Бесщеточные двигатели постоянного тока
| Обратная связь | dCore | дГо | dMove | дПро | |
|---|---|---|---|---|---|
| Бездатчиковый | (✔) | — | — | — | |
| Датчики Холла | ✔ | ✔ | ✔ | ✔ | |
| Энкодер высокого разрешения | (✔) | — | — | ✔ | |
| Контроллер | dCore | дГо | dMove | дПро | |
| Блок коммутации | — | ✔ | ✔ | (✔) | |
| Синусоидальная коммутация / векторное управление | — | — | — | ✔ | |
| Скорость (разомкнутый контур) | — | ✔ | (✔) | (✔) | |
| Скорость/крутящий момент (замкнутый контур) | — | — | ✔ | ✔ | |
| Позиция | — | — | ✔ | ✔ | |
| Сложные профили движения | — | — | — | ✔ | |
| Характеристики | dCore | дГо | dMove | дПро | |
| Программируемые / Автономные приложения / Motion Apps | — | — | — | ✔ | |
| Надежная изоляция шины | — | — | — | (✔) | |
| Контур балласта параметрируемый | — | — | (✔) | ✔ | |
| Безопасное отключение крутящего момента | — | — | — | (✔) | |
| Выход тормоза | — | — | (✔) | ✔ | |
| Команды быстрого запуска | — | — | ✔ | ✔ | |
| Интерфейс | dCore | дГо | dMove | дПро | |
| Цифровые и аналоговые входы/выходы | — | (✔) | ✔ | ✔ | |
| Полевая шина (CANopen, RS485, Modbus) | — | — | (✔) | (✔) | |
Промышленный Ethernet (Profinet, EtherCAT,. ..) ..) | — | — | — | (✔) | |
| ССИ | — | — | — | (✔) | |
| Заменяет предыдущие версии | Зал | КИ | SI, CI (низкое разрешение) | SI, CI, PI, MI, EC (высокое разрешение) |
Бесщеточный двигатель 24 В пост. Название продукта: B42100-24 | Артикул: 13042053 Voltage 24VDC Nominal current 6.5A
1+ €287.20 5+ 243,10 € 25+ 172,20 € 50+ 114,00 € 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 12 В пост. Название продукта: B4240-12 | Артикул: 13042087 Voltage 12VDC Nominal current 3.9A
1+ €170.20 5+ 141,80 € 25+ 99,20 € 50+ 64,80 € 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 24 В пост. Название продукта: B4240-24 | Артикул: 13042050 Voltage 24VDC Nominal current 2A
1+ €162.60 5+ € 136,80 25+ 96,20 € 50+ 62,80 € 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 12 В пост. Название продукта: B4260-12 | Артикул: 13042088 Voltage 12VDC Nominal current 6.2A
1+ €216.70 5+ 182,80 € 25+ 128,10 € 50+ 83,60 € 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 24 В пост. Название продукта: B4260-24 | Артикул: 13042051 Voltage 24VDC Nominal current 3.2A
1+ €206.60 5+ 174,30 € 25+ 123,10 € 50+ 80,50 € 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 24 В пост. Название продукта: B4280-24 | Артикул: 13042052 Voltage 24VDC Nominal current 4.7A
1+ €252.70 5+ €212.80 25+ 151,50 € 50+ 99,20 € 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 24 В пост. Название продукта: B5755-24 | Артикул: 13042054 Voltage 24VDC Nominal current 2.17A
1+ €203.50 5+ 172,20 € 25+ 124,10 € 50+ 81,60 € 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 24 В пост. Название продукта: B86112-24 | Артикул: 13042093 Voltage 24VDC Nominal current 23A
1+ €580.90 2+ € 518.70 5+ 367,20 € 10+ 252,70 € 25+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 48 В пост. Название продукта: B86112-48 | Артикул: 13042057 Напряжение 48 В постоянного тока Номинальный ток 11,8 А
1+ €548.00 2+ €488.20 5+ €344.40 10+ €236.00 25+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 48 В пост. Название продукта: B86139-48 | Артикул: 13042058 Напряжение 48 В постоянного тока Nominal current 16.5A
1+ €741.00 2+ €662.40 5+ 469,60 € 10+ 323,70 € 25+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 12 В пост. Название продукта: B8672-12 | Артикул: 13042089 Voltage 12VDC Nominal current 14.95A
1+ €322.60 2+ 288,20 € 5+ 202,60 € 10+ 138,70 € 25+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 24 В пост. Название продукта: B8672-24 | Артикул: 13042090 Voltage 24VDC Nominal current 47A
1+ €322.60 2+ € 288,20 5+ 202,60 € 10+ 138,70 € 25+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 48 В постоянного тока 19,4А 3100об/мин 117Вт Название продукта: B8672-48 | Артикул: 13042055 Voltage 48VDC Nominal current 19.
1+ €309.00 2+ €275,60 5+ 193,90 € 10+ 132,70 € 25+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 12 В постоянного тока 51 А 1800 об/мин 116 Вт Название продукта: B8686-12 | Артикул: 13042091 Напряжение 12 В постоянного тока Номинальный ток 51 A
1+ € 450,90 2+ € 401,70 5+ € 401,70 5+ € 401,70 5+ € 401,70 | |||||||||||||
| 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 29292 6.  Spin UpSpin Down В наличии p > |
Бесщеточный двигатель 24 В постоянного тока 56 А 3100 об/мин 225 Вт Название продукта: B8686-24 | Артикул: 13042092 Напряжение 24 В постоянного тока Номинальный ток 56A
1+ €450. 2+ €401.70 5+ €280.60 10+ 192,00 € 25+ Вращать вверхВращать вниз В наличии р > | |||||||||||||
Бесщеточный двигатель 48 В пост. тока 6,61 А 3100 об/мин 228 Вт Название продукта: B8686-48 | Артикул: 13042056 Voltage 48VDC Nominal current 6.61A
1+ €429. 2+ 382,90 € 5+ 266,90 € 10+ 183,90 € 25+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 12 В пост. тока 1,1 А 4800 об/мин 4,3 Вт Название продукта: BR2245-12 | Артикул: 13042094 Voltage 12VDC Nominal current 1.1A
1+ €180. 5+ 150,50 € 25+ 108,40 € 50+ 69,9 €0 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 24 В пост. тока 0,7 А 4800 об/мин 3,8 Вт Название продукта: BR2245-24 | Артикул: 13042059 Voltage 24VDC Nominal current 0.7A
1+ €171. 5+ 143,90 € 25+ 104,30 € 50+ 66,80 € 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 12 В пост. тока 0,65 А 3500 об/мин 7 Вт Название продукта: BR2268-12 | Артикул: 13042060 Voltage 12VDC Nominal current 0.65A
1+ €192. 5+ 160,60 € 25+ 115,90 € 50+ 75,00 € 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 24 В пост. тока 1,3 А 3500 об/мин 7 Вт Название продукта: BR2268-24 | Артикул: 13042061 Voltage 24VDC Nominal current 1.3A
1+ €182. 5+ 152,50 € 25+ 111,40 € 50+ 71,9 €0 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 12 В пост. тока 1,25 А 8000 об/мин 5 Вт Название продукта: BR2826-12 | Артикул: 13042062 Voltage 12VDC Nominal current 1.25A
1+ €191. 5+ 159,50 € 25+ 115,90 € 50+ 75,00 € 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 24 В пост. тока 1,5 А 8000 об/мин 5 Вт Название продукта: BR2826-24 | Артикул: 13042063 Voltage 24VDC Nominal current 1.5A
1+ €182. 5+ 152,50 € 25+ 109,30 € 50+ 71,00 € 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 12 В пост. тока 2 А 10000 об/мин 14 Вт Название продукта: BR2838-12 | Артикул: 13042064 Voltage 12VDC Nominal current 2A
1+ €199. 5+ € 166,10 25+ 120,10 € 50+ 78,50 € 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 24 В пост. тока 2,5 А 10000 об/мин 14 Вт Название продукта: BR2838-24 | Артикул: 13042065 Voltage 24VDC Nominal current 2.5A
1+ €189. 5+ 158,50 € 25+ 114,90 € 50+ 75,00 € 100+ Spin UpSpin Down В наличии p > | |||||||||||||
Бесщеточный двигатель 12 В пост. тока 2,7 А 3700 об/мин 19Вт Название продукта: BR2877-12 | Артикул: 13042066 Voltage 12VDC Nominal current 2.7A
1+ €276. 2+ €243,10 5+ 176,20 € 10+ 118,00 € 25+ Spin UpSpin Down В наличии p > |
 тока 6,5 А 4000 об/мин 105 Вт
тока 6,5 А 4000 об/мин 105 Вт тока 3,9 А 4000 об/мин 26 Вт
тока 3,9 А 4000 об/мин 26 Вт тока, 2 А, 4000 об/мин, 26 Вт.
тока, 2 А, 4000 об/мин, 26 Вт. тока 6,2 А 4000 об/мин 52 Вт
тока 6,2 А 4000 об/мин 52 Вт тока 3,2 А 4000 об/мин 52 Вт
тока 3,2 А 4000 об/мин 52 Вт тока 2,17 А 4000 об/мин 52 Вт
тока 2,17 А 4000 об/мин 52 Вт тока 23 А 3100 об/мин 393 Вт
тока 23 А 3100 об/мин 393 Вт тока 11,8 А 3000 об/мин 436 Вт
тока 11,8 А 3000 об/мин 436 Вт тока 16,5 А 3000 об/мин 657 Вт
тока 16,5 А 3000 об/мин 657 Вт тока 14,95 А 3200 об/мин 117 Вт
тока 14,95 А 3200 об/мин 117 Вт тока 47 А 3000 об/мин 112 Вт
тока 47 А 3000 об/мин 112 Вт 4A
4A 90
90 00
00 40
40 20
20 00
00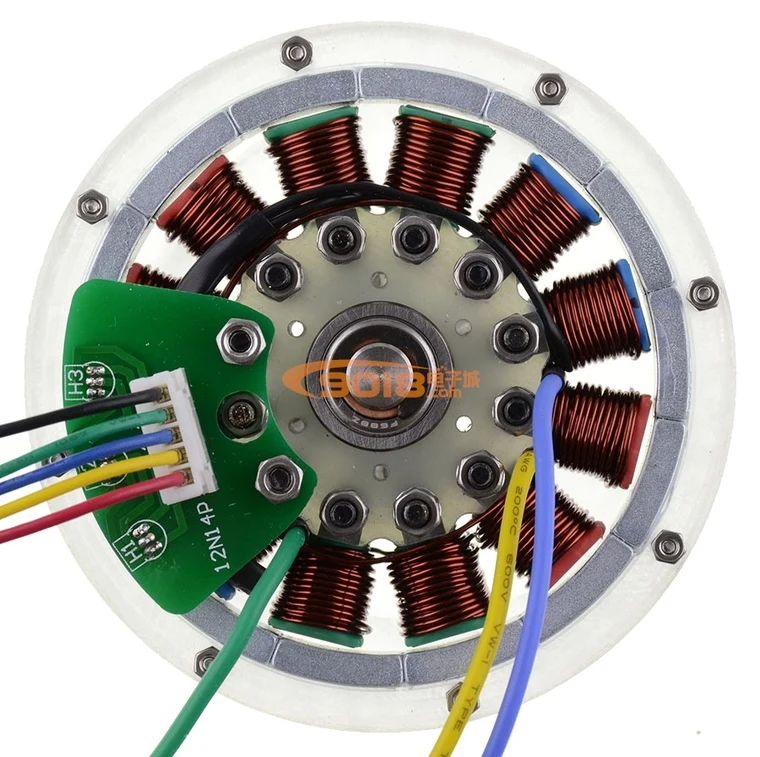 80
80 00
00 80
80 10
10 90
90 60
60Тенденции рынка бесщеточных двигателей постоянного тока и глобальная информация, 2030 г.
Исследование рынка бесщеточных двигателей постоянного тока, 2030 г.
Объем мирового рынка бесщеточных двигателей постоянного тока оценивался в 33,2 миллиарда долларов в 2020 году и, по прогнозам, достигнет 72,2 миллиарда долларов к 2030 году, увеличившись в среднем на 8,1% в период с 2021 по 2030 год. 32 684 тысячи единиц в 2020 году и, по прогнозам, к 2030 году достигнет 3 58 321 тысячи единиц, что означает среднегодовой темп роста в 10,3% с 2021 по 2030 год. Двигатель используется для преобразования электрической энергии в механическую. Двигатели BLDC имеют три катушки на статоре и могут контролировать максимальную силу вращения, известную как крутящий момент. Им можно легко управлять по сравнению с щеточными двигателями постоянного тока, используя механизм обратной связи для обеспечения желаемой скорости вращения и крутящего момента.
Двигатели BLDC имеют три катушки на статоре и могут контролировать максимальную силу вращения, известную как крутящий момент. Им можно легко управлять по сравнению с щеточными двигателями постоянного тока, используя механизм обратной связи для обеспечения желаемой скорости вращения и крутящего момента.
Вспышка COVID 19 повлияла на рост производства бесщеточных двигателей постоянного тока из-за мер по блокировке в странах и задержек с производством бесщеточных двигателей постоянного тока, которые используются в здравоохранении, автомобилестроении, ОВКВ и других отраслях.
Бесщеточные двигатели постоянного тока обеспечивают превосходную управляемость и высокий КПД и широко используются во многих областях, таких как автомобилестроение, электроинструменты и ОВКВ. Бесщеточные двигатели постоянного тока имеют преимущество в энергосбережении по сравнению с другими типами двигателей. По сравнению с обычным двигателем бесщеточные двигатели постоянного тока обеспечивают меньший износ и снижают общие затраты на техническое обслуживание.
Способность экономить энергию и повышать эффективность работы оборудования способствует росту рынка бесщеточных двигателей постоянного тока. Эти двигатели сочетают в себе высокую эффективность и надежность, что делает их экономичными в широком диапазоне применений, включая промышленность HVAC, электроинструменты и автомобилестроение. Эти двигатели термически стойкие, не требуют особого обслуживания и работают при низких температурах, что снижает вероятность искрообразования. Кроме того, рынок бесколлекторных двигателей постоянного тока растет из-за роста производства автомобилей и увеличения количества двигателей постоянного тока с бесколлекторным двигателем, используемых в транспортных средствах. В автомобилях двигатели BLDC используются в системах трансмиссии, предохранительной арматуре и шасси. Кроме того, увеличение таких функций, как сиденье с электродвигателем, двери, дворники и регулируемые зеркала, повышает спрос на двигатели BLDC.
Кроме того, автомобильная промышленность в Азиатско-Тихоокеанском регионе расширяется значительными темпами, поэтому этот фактор обеспечивает прибыльные возможности роста на рынке бесколлекторных двигателей постоянного тока. Например, по данным Управления международной торговли, ожидается, что к 2025 году внутреннее производство автомобилей в Китае достигнет 35 миллионов. Кроме того, в марте 2021 года правительство Китая инвестировало 60 миллиардов долларов в поддержку сектора электромобилей. Ожидается, что такие факторы создадут возможности для роста бесщеточных двигателей постоянного тока в течение прогнозируемого периода.
Например, по данным Управления международной торговли, ожидается, что к 2025 году внутреннее производство автомобилей в Китае достигнет 35 миллионов. Кроме того, в марте 2021 года правительство Китая инвестировало 60 миллиардов долларов в поддержку сектора электромобилей. Ожидается, что такие факторы создадут возможности для роста бесщеточных двигателей постоянного тока в течение прогнозируемого периода.
Рынок бесщеточных двигателей постоянного тока
По типу ротора
С точки зрения выручки сегмент внутреннего ротора был крупнейшим в 2020 году , внутренний ротор и внешний ротор. Сегмент внутреннего ротора занимает максимальную долю рынка. Однако ожидается, что сегмент внешних роторов будет расти быстрыми темпами в течение прогнозируемого периода. Внутренний бесщеточный. Имеет такие особенности, как вращающийся вал, обладающий малым моментом инерции, возможность уменьшения размера основного блока и способность работать при высоких температурах.
Рынок бесколлекторных двигателей постоянного тока
По диапазону мощности
751 В сегменте мощностью 3 кВт прогнозируется значительный среднегодовой рост
Получить дополнительную информацию об этом отчете: Запросить образцы страниц
в сегменте 0–750 Вт был зарегистрирован самый высокий доход в 2020 году. Бесщеточные двигатели постоянного тока используются для подъема или опускания окон транспортных средств и для электронной регулировки сидений. Кроме того, бесщеточные двигатели постоянного тока используются в электромобилях из-за их низких эксплуатационных расходов, высокой эффективности, высоких рабочих скоростей, компактных размеров и отсутствия искрения на щетках.
Бесщеточные двигатели постоянного тока используются для подъема или опускания окон транспортных средств и для электронной регулировки сидений. Кроме того, бесщеточные двигатели постоянного тока используются в электромобилях из-за их низких эксплуатационных расходов, высокой эффективности, высоких рабочих скоростей, компактных размеров и отсутствия искрения на щетках.
В 2019 году новый коронавирус (COVID-19) быстро распространился по разным странам и регионам, оказав огромное влияние на жизнь людей и общества в целом. Это началось как состояние здоровья человека, а теперь стало серьезной угрозой для мировой торговли, экономики и финансов. Пандемия COVID-19 остановила производство многих продуктов на рынке бесщеточных двигателей постоянного тока из-за ограничений. Кроме того, число случаев заболевания COVID-19 сократилось благодаря тому, что правительства взяли на себя основные меры безопасности и внедрили вакцину от COVID-19.. Кроме того, ожидается, что это приведет к возобновлению производства на полную мощность, что, в свою очередь, поможет полностью восстановить долю рынка бесколлекторных двигателей постоянного тока к середине 2022 года.
Brushless DC Motors Market
By Region
2030
Asia-pacific
North America
Europe
Lamea
Asia-Pacific holds a dominant position in 2020 and is expected to grow at a significant rate during прогнозный период.
Получите дополнительную информацию об этом отчете: Request Sample Pages
На основе региона Азиатско-Тихоокеанский регион был регионом с наибольшим доходом в 2020 году. Увеличение государственных инвестиций в автомобильный сектор и рост производства автомобилей привели к бесколлекторным двигателям постоянного тока. рост рынка двигателей в этом регионе.
Рынок сегментирован по типу ротора, диапазону мощности, скорости, конечному пользователю и региону. В зависимости от типа ротора рынок делится на внутренний ротор и внешний ротор. По диапазону мощности он подразделяется на 0-750 Вт, 751 Вт-3 кВт и более 3 кВт. В зависимости от скорости они делятся на менее 500 об/мин, от 501 до 2000 об/мин, от 2001 до 10 000 об/мин и более 10 000 об/мин. В зависимости от конечного пользователя он делится на промышленное оборудование, автомобилестроение, здравоохранение, промышленность HVAC, электроинструменты и другие. По регионам анализ рынка проводится в Северной Америке (США, Канада и Мексика), Европе (Великобритания, Франция, Германия, Италия, Испания и остальные страны Европы), Азиатско-Тихоокеанском регионе (Китай, Япония, Индия, Австралия, Южная Корея и остальные страны Азиатско-Тихоокеанского региона) и LAMEA (Бразилия, Аргентина, страны Персидского залива, Южная Африка и остальные страны LAMEA).
В зависимости от конечного пользователя он делится на промышленное оборудование, автомобилестроение, здравоохранение, промышленность HVAC, электроинструменты и другие. По регионам анализ рынка проводится в Северной Америке (США, Канада и Мексика), Европе (Великобритания, Франция, Германия, Италия, Испания и остальные страны Европы), Азиатско-Тихоокеанском регионе (Китай, Япония, Индия, Австралия, Южная Корея и остальные страны Азиатско-Тихоокеанского региона) и LAMEA (Бразилия, Аргентина, страны Персидского залива, Южная Африка и остальные страны LAMEA).
Анализ конкуренции
Ключевыми игроками, работающими в мировой индустрии бесщеточных двигателей постоянного тока, являются Allied Motion Technologies Inc., AMETEK Inc., Arc Systems Inc., Buhler Motor GmbH, Faulhaber Group, Johnson Electric Holdings Limited, Maxon Motors. AG, MinebeaMitsumi Inc., Nidec Corporation, Oriental Motor Co. Ltd. и Robert Bosch GmbH
Ключевые преимущества для заинтересованных сторон
- динамика.
- Углубленный анализ рынка бесщеточных двигателей постоянного тока проводится путем построения рыночных оценок для ключевых сегментов рынка в период с 2021 по 2030 год.
- Обширный анализ рынка бесщеточных двигателей постоянного тока проводится путем отслеживания позиционирования ключевых продуктов и мониторинга основных конкурентов на рынке. рамки.
- Всесторонний анализ всех регионов позволяет определить преобладающие возможности.
- В отчет включен прогнозный анализ мирового рынка бесщеточных двигателей постоянного тока с 2021 по 2030 год.
- В этом отчете представлены ключевые игроки на рынке, а их стратегии тщательно проанализированы, что помогает понять конкурентные перспективы рынка бесщеточных двигателей постоянного тока.

Отчет о рынке бесщеточных двигателей постоянного тока.1909 [Отчет на 181 странице] Объем мирового рынка бесщеточных двигателей постоянного тока, по прогнозам, достигнет 15,2 млрд долларов США к 2025 году при среднегодовом темпе роста 9,5% по сравнению с 9,6 млрд долларов США в 2020 году. Чтобы узнать о предположениях, рассматриваемых в исследовании, Запрос на бесплатный образец отчета Системы отопления, вентиляции и кондиционирования воздуха (HVAC) обеспечивают температурный комфорт и качество воздуха в помещениях. Они являются одним из основных строительных блоков современной инфраструктуры, особенно крупных офисных зданий или торговых центров. Электродвигатели постоянного тока широко используются в системах отопления, вентиляции и кондиционирования воздуха для достижения высокой эффективности систем воздушного потока и максимального увеличения их срока службы и мощности. Кроме того, компании, работающие в сфере HVAC, начали автоматизировать свои процессы продаж и обслуживания, что позволяет им сократить расходы на привлечение клиентов и сохранить конкурентоспособность цен. Внедрение интеллектуальных технологий, таких как использование приложений для смартфонов, помогает пользователям управлять освещением, вентиляцией и другими системами из одной точки управления. Расширение коммерческих площадей, строительство новых офисных помещений, корпоративных центров, жилых зданий и организованных торговых точек, а также повышение уровня доходов населения среднего класса в странах Юго-Восточной Азии и Ближнего Востока делают климатическое оборудование очень доступным для большое количество потребителей. Ожидается также, что постепенный рост жилищного сектора в США и Западной Европе будет стимулировать спрос на оборудование HVAC, такое как вакуумные контакторы. По данным Министерства энергетики США, к 2020 году в стране ожидается увеличение спроса на климатическое оборудование на 10% по сравнению с 2019 годом.. Таким образом, ожидается, что этот повышенный спрос на системы HVAC приведет к увеличению спроса на бесщеточные двигатели постоянного тока, тем самым подпитывая рост рынка. Бесщеточные двигатели постоянного тока дороже, чем другие типы двигателей, поскольку для обеспечения их бесперебойной работы требуются электрические контроллеры. Мировая автомобильная промышленность переходит на электрическую мобильность со значительными изменениями в технологии электромобилей. Достижения в области аккумуляторных технологий для снижения стоимости аккумуляторов и повышения скорости их зарядки, а также увеличение государственной поддержки в виде налоговых льгот и стимулов для продвижения экологически чистых электромобилей, в которых используются бесщеточные двигатели постоянного тока, открывают возможности для роста магазин. Бесщеточные двигатели постоянного тока на 80–90 % более эффективны, чем обычные коллекторные двигатели. Поскольку электромобили питаются от аккумуляторов и требуют энергосберегающих двигателей для обеспечения меньшего энергопотребления, ожидается, что это послужит возможностью для роста рынка. Рынок бесщеточных двигателей постоянного тока сильно фрагментирован, и на нем работает большое количество местных и международных игроков. Качество продукции является основным параметром для дифференциации на этом рынке. Организованный сектор рынка в основном ориентирован на промышленных покупателей и поддерживает отличное качество продукции, в то время как неорганизованный сектор рынка предлагает недорогие альтернативы для использования потенциала местных рынков. Чтобы узнать о предположениях, рассмотренных в исследовании, загрузите брошюру в формате pdf В двигателях с внутренним ротором роторы расположены в центре двигателей и окружены обмоткой статора. Поскольку роторы расположены посередине, магниты ротора препятствуют проникновению теплоизоляции внутрь, и поэтому тепло легко рассеивается. С появлением Индустрии 4.0 мировое промышленное производство претерпело значительные изменения. Бесщеточные двигатели постоянного тока со скоростью от 2001 до 10000 об/мин широко используются в медицинском оборудовании, таком как мембранные насосы газоанализаторов, стоматологические инструменты, насосы, наркозные вентиляторы и насосы дыхательных систем. Они также используются в промышленных приложениях, таких как инструменты лазерного сканирования, промышленные лазерные считыватели штрих-кода, роторы шпинделя станков с ЧПУ и приводы промышленной автоматизации. Эти двигатели также используются в бытовой технике, тяговых двигателях, системах постоянного тока с солнечными насосами и автобусных системах кондиционирования. Ожидается, что Азиатско-Тихоокеанский регион будет доминировать на рынке бесщеточных двигателей постоянного тока в течение прогнозируемого периода, поскольку регион является центром производства электронных компонентов и устройств, соответствующих различным отраслям. Кроме того, в регионе также наблюдаются большие инвестиции в производство компонентов электромобилей, в основном аккумуляторных систем. На рисунке ниже показаны прогнозируемые объемы рынка в различных регионах с соответствующими среднегодовыми темпами роста на 2025 год9.0426 AMETEK (США), Allied Motion (США), Nidec Corporation (Япония), Johnson Electric (Китай) и MinebeaMitsumi (Япония) являются ведущими игроками на рынке бесщеточных двигателей постоянного тока. Maxon Motor (Швейцария), Regal Beloit Corporation (США), Oriental Motor (Япония), Portescap (США) и ElectroCraft (США) и другие игроки, работающие на рынке, являются ведущими игроками на мировом рынке. Образец запроса Нажмите на изображение, чтобы увеличить Метрика отчета Детали Объем рынка, доступный для лет 20162025 Базовый год считается 2019 Прогнозный период 20202025 Единицы прогноза Стоимость (долл. Охваченные сегменты Тип, конечный пользователь, скорость и регион. Охваченные географии Азиатско-Тихоокеанский регион, Южная Америка, Северная Америка, Европа, Ближний Восток и Африка. Охватываемые компании AMETEK (США), Allied Motion (США), Nidec Corporation (Япония), Johnson Electric (Китай), MinebeaMitsumi (Япония), Maxon Motor (Швейцария), Regal Beloit Corporation (США), Oriental Motor (Япония), Portescap ( США) и ElectroCraft (США) (всего 24 компании) В этом исследовательском отчете рынок бесщеточных двигателей постоянного тока классифицируется по типу, конечному пользователю, скорости и региону. Каков текущий объем рынка бесщеточных двигателей постоянного тока? Объем мирового рынка бесщеточных двигателей постоянного тока в 2019 году составил 24,1 миллиарда долларов. Каковы основные движущие силы рынка бесщеточных двигателей постоянного тока? Рынок бесщеточных двигателей постоянного тока определяется основными факторами, такими как новые технологические достижения, повышение рентабельности инвестиций (ROI) и растущая потребность в увеличении добычи из зрелых скважин для оптимизации добычи. Какой регион доминирует в течение прогнозируемого периода на рынке Бесколлекторный двигатель постоянного тока? Азиатско-Тихоокеанский регион станет лидером на рынке бесколлекторных двигателей постоянного тока. Прогнозируется, что рынок в регионе будет расти с максимальным среднегодовым темпом роста 11,1% в период с 2020 по 2025 год. Рост рынка бесщеточных двигателей постоянного тока в Азиатско-Тихоокеанском регионе можно объяснить обширной производственной деятельностью, которая привела к более широкому использованию бесщеточных двигателей постоянного тока во всем мире. Какой сегмент типа является самым быстрорастущим в течение прогнозируемого периода на рынке бесщеточных двигателей постоянного тока? Сегмент внутреннего ротора является самым быстрорастущим в течение прогнозируемого периода. В связи с тенденцией увеличения спроса на электромобили и их ускоренного производства в ближайшие годы. Ожидается, что это, в свою очередь, повысит спрос на бесколлекторные двигатели постоянного тока с внутренним ротором. . Чтобы обсудить вышеуказанные выводы с нашим аналитиком, нажмите Поговорите с аналитиком СОДЕРЖАНИЕ 1 ВВЕДЕНИЕ (Страница № 23) 2 Методология исследования (Страница № 29) 3 Резюме исполнительной власти (стр. № — 39) 4 Премиумная информация (Страница № — 47) 5 Обзор рынка (стр. 6 Анализ сценария (стр. 7 7 Рынок, по типу (стр. № — 63) 9 Рынок, от конечного пользователя (стр. № 73) 10 Рынок, по региону (стр. № — 80) 11 Конкурентный ландшафт (стр. № 131) 12 Оценка компании Матрица и профили компании (Страница № — 137) 13 ПРИЛОЖЕНИЕ (Страница № — 174) В этом исследовании использовались обширные вторичные источники, каталоги и базы данных, такие как Hoovers, Bloomberg BusinessWeek, Factiva и OneSource, для выявления и сбора информации, полезной для технического, ориентированного на рынок и коммерческого изучение мирового рынка. Другие вторичные источники включали годовые отчеты, пресс-релизы и презентации компаний для инвесторов, официальные документы, сертифицированные публикации, статьи признанных авторов, ассоциации производителей, торговые справочники и базы данных. Рынок бесщеточных двигателей постоянного тока включает несколько заинтересованных сторон, таких как поставщики услуг, подрядчики и сторонние поставщики. Спросная сторона этого рынка характеризуется огромным спросом на цифровизацию со стороны операторов/поставщиков услуг. Достижения в области новых технологий в бытовой электронике со стороны спроса. Для получения качественной и количественной информации были опрошены различные первичные источники как со стороны предложения, так и со стороны спроса на рынке. Распределение первичных респондентов выглядит следующим образом: Чтобы узнать о предположениях, рассмотренных в исследовании, загрузите брошюру в формате pdf его зависимые субрынки. Эти методы также широко использовались для оценки размера различных подсегментов рынка. Методология исследования, используемая для оценки размера рынка, включает следующее: By Power range By Speed Пользователь  1909
1909 By Region Ключевые игроки рынка Buhler Motor GmbH, Faulhaberits Group, Johnson Electric Holdings Limited, Maxoneas Motor GmbH, ., Allied Motion Technologies Inc., Ametek Inc., Robert Bosch GmbH, Arc Systems Inc, Nidec Corporation, Oriental Motor Co. Ltd Объем рынка бесщеточных двигателей постоянного тока, доля, анализ отрасли
 Увеличение промышленного применения этих двигателей и Ожидается, что стремительное внедрение бесщеточных двигателей постоянного тока в приложениях HVAC, автомобилестроения и бытовой электроники станет ключевым фактором, стимулирующим рынок бесщеточных двигателей постоянного тока.
Увеличение промышленного применения этих двигателей и Ожидается, что стремительное внедрение бесщеточных двигателей постоянного тока в приложениях HVAC, автомобилестроения и бытовой электроники станет ключевым фактором, стимулирующим рынок бесщеточных двигателей постоянного тока. Динамика рынка бесколлекторных двигателей постоянного тока
Драйвер: растущий спрос на системы HVAC
 Спрос на системы HVAC растет в Азиатско-Тихоокеанском регионе, особенно в Китае и Индии, из-за постоянного роста его промышленного и коммерческого секторов. Согласно отчету Timetric Construction Intelligence Center (CIC), компании по анализу рынка, ожидается, что в глобальный строительный сектор будет инвестировано около 1,08 трлн долларов США, особенно в развитие промышленных зданий в течение следующих 4-5 лет. . Только в Индии есть проекты на сумму 411,0 млрд долларов США, за ней следуют Китай с запланированными инвестициями в размере 200,0 млрд долларов США и Индонезия с инвестициями в размере 124,0 млрд долларов США к 2020 году в своих строительных секторах.
Спрос на системы HVAC растет в Азиатско-Тихоокеанском регионе, особенно в Китае и Индии, из-за постоянного роста его промышленного и коммерческого секторов. Согласно отчету Timetric Construction Intelligence Center (CIC), компании по анализу рынка, ожидается, что в глобальный строительный сектор будет инвестировано около 1,08 трлн долларов США, особенно в развитие промышленных зданий в течение следующих 4-5 лет. . Только в Индии есть проекты на сумму 411,0 млрд долларов США, за ней следуют Китай с запланированными инвестициями в размере 200,0 млрд долларов США и Индонезия с инвестициями в размере 124,0 млрд долларов США к 2020 году в своих строительных секторах. Все эти факторы способствуют использованию бесщеточных двигателей постоянного тока в системах ОВКВ.
Все эти факторы способствуют использованию бесщеточных двигателей постоянного тока в системах ОВКВ. Ограничение: высокая стоимость бесщеточных двигателей постоянного тока и потребность в контроллерах для них
 Эти двигатели были разработаны для использования в приложениях, в которых они должны заменить недорогие коллекторные двигатели постоянного тока. Хотя щеточные двигатели постоянного тока дешевы, их щетки изнашиваются из-за трения о точку контакта и оси, что снижает их производительность. Таким образом, высокая стоимость бесколлекторных двигателей постоянного тока и потребность в контроллерах в них выступают сдерживающим фактором для роста рынка.
Эти двигатели были разработаны для использования в приложениях, в которых они должны заменить недорогие коллекторные двигатели постоянного тока. Хотя щеточные двигатели постоянного тока дешевы, их щетки изнашиваются из-за трения о точку контакта и оси, что снижает их производительность. Таким образом, высокая стоимость бесколлекторных двигателей постоянного тока и потребность в контроллерах в них выступают сдерживающим фактором для роста рынка. Возможности: переход мировой автомобильной промышленности на электромобили
 По данным МЭА, ожидается, что к 2025 году на Китай будет приходиться 50% мировых пассажирских электромобилей. двигатели постоянного тока.
По данным МЭА, ожидается, что к 2025 году на Китай будет приходиться 50% мировых пассажирских электромобилей. двигатели постоянного тока. Проблема: легкая доступность низкокачественных и недорогих бесщеточных двигателей постоянного тока
 Местные производители бесколлекторных двигателей постоянного тока в большинстве стран ориентированы на неорганизованный сектор и активно конкурируют с мировыми поставщиками на соответствующих рынках. Ведущие игроки рынка в настоящее время подвергаются острой конкуренции со стороны таких неорганизованных новых участников рынка, поставляющих недорогие и низкокачественные бесколлекторные двигатели постоянного тока. Это выступает в качестве ключевой проблемы для роста рынка.
Местные производители бесколлекторных двигателей постоянного тока в большинстве стран ориентированы на неорганизованный сектор и активно конкурируют с мировыми поставщиками на соответствующих рынках. Ведущие игроки рынка в настоящее время подвергаются острой конкуренции со стороны таких неорганизованных новых участников рынка, поставляющих недорогие и низкокачественные бесколлекторные двигатели постоянного тока. Это выступает в качестве ключевой проблемы для роста рынка. Взаимосвязь рынка
По типу сегмент внутреннего ротора является крупнейшим участником рынка бесщеточных двигателей постоянного тока в течение прогнозируемого периода.
 Это приводит к созданию большого крутящего момента бесщеточными двигателями постоянного тока с внутренним ротором. Эти двигатели используются в производстве, автомобилестроении и производстве бытовой электроники для робототехники, станков с ЧПУ, автоматических открывателей дверей и машин для резки и формовки металла. Для этих приложений требуются двигатели, которые могут выполнять быстрое ускорение и замедление скорости, обеспечивают высокий пусковой момент, имеют возможность реверсивного действия и компактны. По данным IEA EV Outlook 2020, мировые продажи электромобилей в 2019 году достигли 2 млн., что на 40% выше продаж автомобилей 2018 года. Это свидетельствует о тенденции увеличения спроса на электромобили и их ускоренного производства в ближайшие годы.
Это приводит к созданию большого крутящего момента бесщеточными двигателями постоянного тока с внутренним ротором. Эти двигатели используются в производстве, автомобилестроении и производстве бытовой электроники для робототехники, станков с ЧПУ, автоматических открывателей дверей и машин для резки и формовки металла. Для этих приложений требуются двигатели, которые могут выполнять быстрое ускорение и замедление скорости, обеспечивают высокий пусковой момент, имеют возможность реверсивного действия и компактны. По данным IEA EV Outlook 2020, мировые продажи электромобилей в 2019 году достигли 2 млн., что на 40% выше продаж автомобилей 2018 года. Это свидетельствует о тенденции увеличения спроса на электромобили и их ускоренного производства в ближайшие годы. По мнению конечных пользователей, ожидается, что сегмент бытовой электроники будет расти самыми быстрыми темпами в течение прогнозируемого периода.
 Оцифровка данных, автоматизация машин и связь между активами на производственных предприятиях подпитывают эволюцию технологических инфраструктур. Растущая конкуренция в отрасли бытовой электроники побуждает компании внедрять инновационные технологии и анализы для обеспечения оптимального использования своих ресурсов. Автоматизированная электроника, развернутая на промышленных производственных объектах, требует для своей работы непрерывного источника питания. Поэтому они используют батареи и наноматериалы. Бесщеточные двигатели постоянного тока широко используются в офисном оборудовании, таком как печатные машины, электрические шторы, факсимильные аппараты и копировальные аппараты, а также в бытовой технике высокого класса, такой как пылесосы, DVD-плееры и очистители воздуха. Они также набирают обороты в коммерческом, а также домашнем холодильном и кондиционирующем оборудовании. Бесщеточные двигатели постоянного тока с внешним ротором в основном используются в охлаждающих вентиляторах компьютеров и серверов, а шпиндельные двигатели используются в жестких дисках.
Оцифровка данных, автоматизация машин и связь между активами на производственных предприятиях подпитывают эволюцию технологических инфраструктур. Растущая конкуренция в отрасли бытовой электроники побуждает компании внедрять инновационные технологии и анализы для обеспечения оптимального использования своих ресурсов. Автоматизированная электроника, развернутая на промышленных производственных объектах, требует для своей работы непрерывного источника питания. Поэтому они используют батареи и наноматериалы. Бесщеточные двигатели постоянного тока широко используются в офисном оборудовании, таком как печатные машины, электрические шторы, факсимильные аппараты и копировальные аппараты, а также в бытовой технике высокого класса, такой как пылесосы, DVD-плееры и очистители воздуха. Они также набирают обороты в коммерческом, а также домашнем холодильном и кондиционирующем оборудовании. Бесщеточные двигатели постоянного тока с внешним ротором в основном используются в охлаждающих вентиляторах компьютеров и серверов, а шпиндельные двигатели используются в жестких дисках. Для этой бытовой электроники требуются электродвигатели для преобразования электрической энергии в механическую.
Для этой бытовой электроники требуются электродвигатели для преобразования электрической энергии в механическую. По скорости ожидается, что сегмент 2001-10 000 об/мин внесет наибольший вклад в течение прогнозируемого периода.
Ожидается, что на Азиатско-Тихоокеанский регион будет приходиться самый большой размер рынка в течение прогнозируемого периода.
Ключевые игроки рынка
Получите онлайн-доступ к отчету о первом в мире Market Intelligence Cloud
Содержание отчета
 США)
США) В зависимости от типа:
В зависимости от конечного пользователя:
В зависимости от скорости:
В зависимости от региона:
Последние разработки
 Эти новые бесщеточные двигатели с внешним ротором предназначены для приложений с высоким крутящим моментом и низким зубчатым зацеплением, таких как робототехника, AGV и ручные электроинструменты.
Эти новые бесщеточные двигатели с внешним ротором предназначены для приложений с высоким крутящим моментом и низким зубчатым зацеплением, таких как робототехника, AGV и ручные электроинструменты.
Часто задаваемые вопросы (FAQ):
 ключевые отрасли региона.
ключевые отрасли региона.
1.1 Цели исследования
1.2 Определение рынка и область применения
1.2.1 Рынок
1.2.2 Рынок, по скорости: включения и исключения
1.3 Рыночные сферы
1.3.1 Сегментация рынка
1.3.2 Региональная область
1,4 года, рассмотренные для исследования
1,5 валюта
1. 6 Ограничения
6 Ограничения
1,7 Заинтересованных сторон
1,8 Сводка изменений
1,8.1 Изменения размера рынка
Рисунок 1 МНМ показывает рост рынка с 2019 до 2020
2.1 ДАННЫЕ ИССЛЕДОВАНИЯ
РИСУНОК 2 РЫНОК: ДИЗАЙН ИССЛЕДОВАНИЯ
2.1.1 ВТОРИЧНЫЕ ДАННЫЕ
2.1.1.1 Ключевые данные из вторичных источников
ПЕРВИЧНЫЕ ДАННЫЕ
1. 2330 2.1.2.1. Ключевые данные из первичных источников
2.1.2.2 Разрушение праймериз
2.2 Область
Рисунок 3 Ключевые метрики, рассмотренные для оценки спроса на бесщеточные двигатели DC
2.3 Оценка размера рынка
2.3.1 Анализ на стороне спроса
2.3.1 Расчеты Рыночного размера
2.3.1 Анализ на стороне спроса
2.3.1.
2.3.1.2 Допущения
2.3.2 АНАЛИЗ СТОРОНЫ ПРЕДЛОЖЕНИЯ
РИСУНОК 4 АНАЛИЗ СТОРОНЫ ПРЕДЛОЖЕНИЯ
2. 3.2.1 Расчеты
3.2.1 Расчеты
Рисунок 5 Ключевые метрики, рассмотренные для оценки поставки бесщеточных двигателей DC
2.3.2.2. Предположения
Рисунок 6 Анализ доходов Компании, 2019
2.3.3 Прогноз
2.4 Разбитие рынка и триангуляция данных
Рисунок 7 Методология Триунегуляции
. 2.5 ОСНОВНЫЕ ВЫВОДЫ
РИСУНОК 8 ТОЧКА ЗРЕНИЯ ОСНОВНЫХ ПОСТАВЩИКОВ УСЛУГ
3.1 Анализ сценария
Рисунок 9 Анализ сценария: рынок, 20182025
3.1.1 Оптимистический сценарий
3.1.2 Рыночный сценарий
3.1.3 Пессимистический сценарий
Таблица 1 Рынок.
РИСУНОК 10 КРУПНЕЙШАЯ ДОЛЯ РЫНКА В 2019 ГОДУ В АЗИАТСКО-ТИХООКЕАНСКОМ РЕГИОНЕ
2330 Рисунок 12 2 00110 000 об / мин для вывода рынка с 2020 по 2025 год
Рисунок 13 Сегмент потребительской электроники для учета наибольшего размера рынка с 2020 по 2025 г.
4. 1 ПРИВЛЕКАТЕЛЬНЫЕ ВОЗМОЖНОСТИ НА РЫНКЕ
1 ПРИВЛЕКАТЕЛЬНЫЕ ВОЗМОЖНОСТИ НА РЫНКЕ
РИСУНОК 14 ПОВЫШЕНИЕ МИРОВОГО СПРОСА НА БЕСЩЕТОЧНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА ДЛЯ ИСПОЛЬЗОВАНИЯ В РАЗЛИЧНЫХ ПРИМЕНЕНИЯХ РОСТ РЫНКА ТОПЛИВА
4.2 РЫНОК БЕСЩЕТОЧНЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА ПО ТИПУ
Рисунок 15 Внутренний сегмент ротора на рынке для роста в высоком среднем CAGR с 2020 по 2025 год
4.3 Рынок бесщеточных DC Motors, по скорости
Рисунок 16 2 00110 000 Оргольдор на рынке, прогнозируемые на самом высоком CAGR с 2020 по 2025
4.4 4.4 4.4 4.4 Бесщеточный рынок DC Motors, к конечному пользователю
Рисунок 17 Автомобильный сегмент рынка, который вырос на самом высоком CAGR с 2020 по 2025 год
4.5 Рынок, по региону
Рисунок 18 Рынок в Азиатско -Тихоокеанском регионе, прогнозируемый в самом высоком CAGR с 2020 по 2025 год
4.6 Рынок в Азиатско -Тихоокеанском регионе, по конечным пользователям и страной
Рисунок 19 Сегмент потребительской электроники и Китай составляли крупнейшие акции рынка в Азиатско -Тихоокеанском регионе в 2019 году № — 51)
№ — 51)
5.1 Введение
5.2 ОЦЕНКА ЗДОРОВЬЯ COVID-19
РИСУНОК 20 ГЛОБАЛЬНОЕ РАСПРОСТРАНЕНИЕ COVID-19
2330 5.4 COVID-19 Экономическая оценка
Рисунок 23 Пересмотренный прогноз ВВП для избранных стран G20 в 2020 году
5.5 Динамика рынка
Рисунок 24 Рынок: Драйверы, ограничения, возможности и проблемы
5.5.1 Драйверы
5.5.1.1.
5.5.1.2 Низкие затраты на техническое обслуживание бесщеточных двигателей постоянного тока
5.5.1.3 Быстрое внедрение энергоэффективных бесщеточных двигателей постоянного тока во всем мире
5.5.2 ограничения
5.5.2.2. низкокачественные и недорогие бесщеточные двигатели постоянного тока
5.6 АНАЛИЗ ЦЕПОЧКИ ЦЕННОСТИ
2330 5.6.1 Поставщики сырья
5.6.2 Производители оригинального оборудования
5.6.3 Собрание/производители
5.6.4 Дистрибьюторы
5.6.5 Конечные пользователи № 59)
№ 59)
6.1.
РИСУНОК 26 КРИТЕРИИ, ВЛИЯЮЩИЕ НА МИРОВУЮ ЭКОНОМИКУ
6.1.1 ОПТИМИСТИЧЕСКИЙ СЦЕНАРИЙ
2330 6.1.2 Реалистичный сценарий
Таблица 3 Реалистичный сценарий: размер рынка, по региону, 20182025 (млн. Долларов США)
6.1.3 Пессимистический сценарий
Таблица 4 Пессимистический сценарий: размер рынка, по региону, 20182025 (миллион долларов США)
7.1 Введение
Рисунок 27 Внутренний сегмент ротора, чтобы вывести рынок с 2020 по 2025 г.
Таблица 5 Размер рынка, по типу, 20182025 (миллион долларов США)
7.2 Внутренний ротор
7.2.1. Увеличение производства электрических транспортных средств для потребления спроса на внутренний ротор бесщеточный DC Motors
Таблица 6 Внутренний ротор: рынок, по региону, 20182025 (млн. Долларов США)
7,3 Внешний ротор
7.3.1. РОТОРНЫЕ БЕСЩЕТОЧНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА ОТ СЛАБОТОЧНЫХ УСТРОЙСТВ ПОТРЕБЛЕНИЯ
0006
8. 1 ВВЕДЕНИЕ
1 ВВЕДЕНИЕ
Рисунок 28 2 00110 000 об / мин, который, по прогнозам, будет вывести на рынок с 2020 по 2025 г.
Таблица 8 Размер рынка, по скорости, 20182025 (млн. Долларов США)
8.2 <500 об / мин
8.2.1 Высокий спрос на низкий Скоровые бесщеточные двигатели постоянного тока из приложений Robotics Applications
Таблица 9 <500 об / мин: размер рынка, по региону, 20182025 (млн. Долларов США)
8,3 5012000 об / мин
8.3.1.2330 Таблица 10 5012 000 об / мин: размер рынка, по региону, 20182025 (млн. Долларов США)
8,4 2 00110 000 об / мин
8.4.1 Выразил спрос на 2 00110 000 об / мин Бесстраночные ДК в медицинском оборудовании
Таблица 11 2 Таблица 11 2 Таблица 11 2 Таблица 11 2 Таблица 11 2 Таблица 11 2 Таблица , 00110 000 об / мин: размер рынка, по региону, 20182025 (млн. Долларов США)
8,5> 10 000 об / мин
8.5.1. ПО РЕГИОНАМ, 2018–2025 (МЛН ДОЛЛ. США)
9. 1 Введение
1 Введение
Рисунок 29 Сегмент потребительской электроники для учета наибольшего размера рынка с 2020 по 2025
Таблица 13 Рыночный размер, по конечному пользователю, 20182025 (USD USD Миллион)
9,2 потребительская электроника
9.2.1. Увеличение популярности миниатюрных бесщеточных двигателей постоянного тока в высококлассных потребительских электроники
Таблица 14 Потребительская электроника: размер рынка, по региону, 20182025 (млн. Долларов США)
9.3 Automotive
9.3.1 Растущее внедрение бесщеточных двигателей постоянного тока в автомобилях для замены гидравлических систем
Таблица 15 Автомобили: размер рынка, по региону, 20182025 (млн. Долларов США)
9.4 Производство
9.4.1. ПРОМЫШЛЕННОСТЬ ДЛЯ ЗАМЕНЫ ОБЫЧНЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
ТАБЛИЦА 16 ПРОИЗВОДСТВО: ОБЪЕМ РЫНКА ПО РЕГИОНАМ, 2018–2025 (МЛН Долл. США)
9,5 МЕДИЦИНСКИЕ ПРИБОРЫ
9.5.1 Растущее включение бесщеточных двигателей постоянного тока в медицинские устройства из -за их высокой надежности
Таблица 17 Медицинские устройства: размер рынка, регион, 20182025 (миллион долларов (Млн. Долларов США)
Долларов США)
10.1 Введение
Рисунок 30 Региональный снимок: рынок
Рисунок 31 Рыночный размер, по региону, 20202025 (млн. Долларов США)
Таблица 19 Размер рынка, по региону, 20182025 (млн. Долларов США)
Таблица 20 Размер рынка, по региону, 20182025 (миллионы единиц)
10,2 Влияние COVID-19 на рынке
Таблица 21 Сравнение до- и пост-ковид-19 Сценарии бесщеточного размера двигателя постоянного тока, 20182025 (млн. Долларов США)
Рисунок 32 Рынок: COVID-19 Impact
10.3 Северная Америка
Рисунок 33 Северная Америка: Бесстраночный рынок двигателей DC
Таблица 22 Северная Америка: размер рынка, по типу, 20182025 ( МЛН долларов США)
Таблица 23 Северная Америка: размер рынка, по скорости, 20182025 (млн. Долларов США)
Таблица 24 Северная Америка: размер рынка, по конечному пользователю, 20182025 (млн. Долларов США)
Таблица 25 Северная Америка: размер рынка, по стране, 20182025 (USD Миллион)
10. 3.1 Влияние COVID-19 на Северную Америку
3.1 Влияние COVID-19 на Северную Америку
Таблица 26 Северная Америка: Сравнение сценариев до и пост-ковида-19 -19Влияние на рынок, 20182025 (млн. Долларов США)
10.3.2 US
10.3.2.1 Текущие инвестиции в разработку новых и передовых технологий производства для повышения спроса на бесщеточные двигатели DC в США
Таблица 27 США: Размер рынка, от конечного пользователя, 20182025 (DC. Млн. Долларов США)
Таблица 28 США: размер рынка, по типу, 20182025 (млн. Долларов США)
10.3.3 Канада
10.3.3.1 Процветающая автомобильная промышленность в Канаде, чтобы внести свой вклад в спрос на бесщеточные двигатели DC в стране
Таблица 29 Канада: размер рынка, к конечному пользователю, 20182025 (млн. Долларов США)
Таблица 30 Канада: размер рынка, по типу, 20182025 (млн. Долларов США)
10.3.4 Мексика
10.3.4.1. Для бесщеточных DC Motors в стране
Таблица 31 Мексика: размер рынка, от конечного пользователя, 20182025 (млн. Долларов США)
Таблица 32 Мексика: размер рынка, по типу, 20182025 (млн. Долл. США)
Долл. США)
10,4 Европа
Таблица 33 Европа: размер рынка, по типу, 20182025 (млн. Долларов США)
Таблица 34 Европа: размер рынка, по скорости, 20182025 (млн. Долл. США)
Таблица 35 Европа: размер рынка, от конечного пользователя, 20182025 (USD USD). Миллион)
Таблица 36 Европа: размер рынка, по стране, 20182025 (млн. Долларов США)
10.4.1 Влияние COVID-19 на Европу
Таблица 37 Европа: Сравнение сценариев до и после коврида 19 без бремительных размеров постоянного тока DC. , 2018-2025 (МЛН)
Рисунок 35 Европа: Влияние COVID-19 на рынок, 20182025 (млн. Долл. США)
10.4.2 UK
10.4.2.1 ОБЪЕМ РЫНКА ПО КОНЕЧНЫМ ПОЛЬЗОВАТЕЛЯМ, 2018–2025 (МЛН. Долл. США)
ТАБЛИЦА 39.2330 10.4.3.1. Увеличение производства медицинского оборудования и электрических транспортных средств в Германии для повышения спроса на бесщеточные двигатели постоянного тока в стране
Таблица 40 Германия: размер рынка, от конечного пользователя, 20182025 (млн. Долларов США)
Долларов США)
Таблица 41 Германия: размер рынка, по типу, тип, 20182025 (МЛН долларов США)
10.4.4 ИТАЛИЯ
10.4.4.1 Растущий спрос на производство медицинского оборудования и тестирование бытовой электроники, ведущий к росту рынка в Италии
Таблица 42 Италия: размер рынка, к конечному пользователю, 20182025 (млн. Долларов США)
Таблица 43 Италия: размер рынка, по типу, 20182025 (млн. Долларов США)
10.4.5 Россия
10.4.5.1 Непрерывная модернизация производственного сектора в России Внести свой вклад в рост бесщеточного DC Motor в стране
Таблица 44 Россия: размер рынка, к конечному пользователю, 20182025 (млн. Долларов США)
Таблица 45 Россия: размер рынка, по типу, 20182025 (млн. Долларов США)
10.4.6 Остальная Европа
Таблица 46 Остальная часть Европы: размер рынка, к конечному пользователю, 20182025 (млн. Долларов США)
Таблица 47 Остальная часть Европы: размер рынка, по типу, 20182025 (млн. Долларов США)
Долларов США)
10.5 Asia Pacific
Рисунок Рисунок. 36 АТР: ОБЗОР РЫНКА
ТАБЛИЦА 482330 Таблица 50 Азиатско-Тихоокеанский регион: размер рынка, к конечному пользователю, 20182025 (млн. Долларов США)
Таблица 51 Азиатско-Тихоокеанский регион: размер рынка, по стране, 20182025 (миллион долларов США)
10.5.1 Влияние Covid-19 на Asia Pacific
Таблица 52 Таблица 52 Таблица Азиатско-Тихоокеанский регион: Сравнение сценариев до и пост-ковиды 19 бесщеточных размеров постоянного тока, 2018-2025 (миллион)
Рисунок 37 Азиатско-Тихоокеанский регион: Влияние COVID-19 на рынок, 20182025 (млн. Долл. США)
10.5.2 Китай
10.5.2.1. Увеличение производственной деятельности в Китае, чтобы способствовать росту рынка в стране
Таблица 53 Китай: размер рынка, к конечному пользователю, 20182025 (млн. Долларов США)
Таблица 54 Китай: размер рынка, по типу, 20182025 (млн. Долларов США).
10.5.3 Индия
10.5.3.1 Продолжающаяся индустриализация в Индии, чтобы вызвать спрос на бесщеточные двигатели постоянного тока в стране
Таблица 55 Индия: размер рынка, от конечного пользователя, 20182025 (миллион долларов США)
Таблица 56 Индия: размер рынка, по типу, 20182025 (млн. Долларов США)
Долларов США)
10.5.4 Австралия
10.5.4.1. Продолжающийся переход автомобильной промышленности Австралии к автоматизации, приводящей к росту рынка в стране
Таблица 57 Австралия: размер рынка, КОНЕЧНЫЙ ПОЛЬЗОВАТЕЛЬ, 2018–2025 (МЛН Долл. США)
2330 10.5.5 Япония
10.5.5.1. Растущее внимание на технологически расширенном промышленном оборудовании и производственных процессах для того, чтобы способствовать спросу на бесщеточные двигатели постоянного тока в Японии
Таблица 59 Япония: размер рынка, к конечному пользователю, 20182025 (миллион долларов США)
Таблица 60. ЯПОНИЯ: ОБЪЕМ РЫНКА ПО ТИПУ, 2018–2025 (МЛН. Долл. США)
10.5.6 ЮЖНАЯ КОРЕЯ
10.5.6.1 Увеличение производства электроники и автомобилей в Южной Корее для стимулирования роста рынка в стране
Таблица 61 Южная Корея: бесщеточный размер рынка DC Motors, от конечного пользователя, 20182025 (млн. Долларов США)
Таблица 62 Южная Корея: размер рынка, по типу, 20182025 (млн. Долларов США)
Долларов США)
10.5.7 Тайвань
10.5.7.1 ТАБЛИЦА 63 ТАЙВАНЬ: ОБЪЕМ РЫНКА ПО КОНЕЧНЫМ ПОЛЬЗОВАТЕЛЯМ, 2018–2025 ГГ. (МЛН. Долл. США)
Таблица 64 Тайвань: размер рынка, по типу, 20182025 (млн. Долларов США)
10.5.8 Остальная часть Азиатско -Тихоокеанского региона
Таблица 65 Остальное Азиатско -Тихоокеанское регион: размер рынка, к конечному пользователю, 20182025 (миллион долларов США)
Таблица 66 Остальное Азиат Pacific: размер рынка, по типу, 20182025 (млн. Долларов США)
10,6 Южная Америка
Таблица 67 Южная Америка: размер рынка, по типу, 20182025 (млн. Долларов США)
Таблица 68 Южная Америка: размер рынка, по скорости, 20182025 (млн. Долларов США). )
Таблица 69 Южная Америка: размер рынка, к конечному пользователю, 20182025 (млн. Долларов США)
Таблица 70 Южная Америка: размер рынка, по стране, 20182025 (миллион долларов США)
10,6,1 Влияние COVID-19 на Южную Америку
Таблица 71 Таблица 71 71 Таблица 71. Южная Америка: Сравнение сценариев до и пост-ковиды-19 бесщеточных размеров постоянного тока, 2018-2025 (миллион)
Рисунок 38 Южная Америка: Влияние COVID-19 на рынок, 20182025 (млн. Долларов США)
Долларов США)
10.6.2 Бразилия
10.6.2.1 Процветающая автомобильная промышленность в Бразилии заправляется спрос на бесщеточные DC Motors в стране
Таблица 72 Бразилия: размер рынка, от конечного пользователя, 20182025 (миллион долларов США)
Таблица 73 Бразилия: размер рынка, по типу, 20182025 (миллион долларов США).
10.6.3 АРГЕНТИНА
10.6.3.1 Растущий спрос на бесщеточные двигатели постоянного тока со стороны производителей бытовой электроники Аргентины, стимулирующий рост рынка в стране
Таблица 74 Аргентина: размер рынка, от конечного пользователя, 20182025 (млн. Долларов США)
Таблица 75 Аргентина: размер рынка, по типу, 20182025 (миллион долларов РАЗМЕР ПО КОНЕЧНЫМ ПОЛЬЗОВАТЕЛЯМ, 2018–2025 ГГ. (МЛН ДОЛЛАРОВ США)
ТАБЛИЦА 77 ОСТАЛЬНАЯ ЮЖНАЯ АМЕРИКА: РАЗМЕР РЫНКА ПО ТИПАМ, 2018–2025 гг. (МЛН ДОЛЛАРОВ США)
10,7 БЛИЖНИЙ ВОСТОК
Таблица 78 Ближний Восток: размер рынка, по типу, 20182025 (млн. Долларов США)
Долларов США)
Таблица 79 Ближний Восток: размер рынка, скорость, 20182025 (млн. Долларов США)
Таблица 80 Ближний Восток: размер рынка, от конечного пользователя, 20182025 (доллар США Миллион)
Таблица 81 Ближний Восток: размер рынка, по стране, 20182025 (млн. Долларов США)
10.7.1 Влияние COVID-19 на Ближний Восток
Таблица 82 Ближний Восток: сравнение до и пост-ковид-19Сценарии бесщеточного размера двигателя постоянного тока, 2018-2025 (млн.)
Рисунок 39 Ближний Восток: Влияние COVID-19 на рынок бесщеточных двигателей DC, 20182025 (миллион долларов США)
10,7,2 Саудовская Аравия
10,7.2.1. рынка в Саудовской Аравии
Таблица 83 Саудовская Аравия: размер рынка, от конечного пользователя, 20182025 (млн. Долларов США)
Таблица 84 Саудовская Аравия: размер рынка, по типу, 20182025 (миллион долларов США)
10.7.3 ОАЭ
10.7.3.1. Растущая доля автомобильного сектора в экономике спроса в ОАЭ на бесщеточные двигатели постоянного тока в стране
Таблица 85 ОАЭ: размер рынка, к конечному пользователю, 20182025 (миллион долларов РАЗМЕР, ПО ТИПУ, 2018–2025 (МЛН. Долл. США)
Долл. США)
10.7.4 ИРАН
10.7.4.1 Увеличение использования дизельных двигателей местного производства в автомобилях для содействия росту рынка в Иране
Таблица 87 Иран: размер рынка, к конечному пользователю, 20182025 (млн. Долларов США)
Таблица 88 Иран: размер рынка, по типу, 20182025 (млн. Долларов США)
10,7,5 Остальное Ближнее Восток
Таблица 89 Остальной Ближний Восток: рынок РАЗМЕР ПО КОНЕЧНЫМ ПОЛЬЗОВАТЕЛЯМ, 2018–2025 ГГ. (МЛН ДОЛЛАРОВ США)
1 Африка: бесщеточный размер рынка DC Motors, по типу, 20182025 (млн. Долларов США)
Таблица 92 Африка: размер рынка, скорость, 20182025 (млн. Долларов США)
Таблица 93 Африка: размер рынка, от конечного пользователя, 20182025 (миллион долларов США).
Таблица 94 Африка: размер рынка, по стране, 20182025 (млн. Долларов США)
10.8.1 Влияние COVID-19 на Африку
Таблица 95 Африка: Сравнение сценариев до и пост-ковида 19 -2025 (МЛН)
Рисунок 40 Африка: Влияние COVID-19 на рынок, 20182025 (млн. Долларов США)
Долларов США)
10.8.2 Южная Африка
10.8.2.1. АФРИКА: ОБЪЕМ РЫНКА ПО КОНЕЧНЫМ ПОЛЬЗОВАТЕЛЯМ, 2018–2025 ГГ.2330 10.8.3 Египет
10.8.3.1. Растущие инвестиции в промышленный рост в Египте, приводящий к росту рынка в стране
Таблица 98 Египет: размер рынка, от конечного пользователя, 20182025 (млн. Долларов США)
Таблица 99 Египет: размер рынка, по типу , 20182025 (МЛН долларов США)
10.8.4 ОСТАЛЬНАЯ АФРИКА
2330 Таблица 101 Остальная часть Африки: размер рынка, по типу, 20182025 (млн. Долларов США)
11.1 Обзор
Рисунок 41 Ключевые события в бесстрахном рынке DC Motors с января 2016 г. 2020
.2330 11.4 Ключевые события на рынке
11.4.1 Запуск новых продуктов
11.4.2 Инвестиции и расширения
11.4.3 Контракты и соглашения
11.4.4 Слияния и приобретения
12. 1 МАТРИЦА ОЦЕНКИ КОМПАНИИ ОПРЕДЕЛЕНИЕ И МЕТОДОЛОГИЯ
1 МАТРИЦА ОЦЕНКИ КОМПАНИИ ОПРЕДЕЛЕНИЕ И МЕТОДОЛОГИЯ
12.1.1 STAR
12.1.2 ИННОВАТОРЫ
12.1.2 ИННОВАТОРЫ
2330 12.1.4 Образующихся компаний
Рисунок 43 Бесщета DC Motors Market Company Matrix
12.2 Профили компании
(Обзор бизнеса, предлагаемые продукты, последние разработки, SWOT -анализ, право на выигрыш)*
12.2.1. SNAPSHOT
РИСУНОК 45 AMETEK: SWOT-АНАЛИЗ
12.2.2 ALLIED MOTION
2330 FIGURE 47 ALLIED MOTION: SWOT ANALYSIS
12.2.3 NIDEC CORPORATION
FIGURE 48 NIDEC CORPORATION: COMPANY SNAPSHOT
FIGURE 49 NIDEC CORPORATION: SWOT ANALYSIS
12.2.4 MINEBEAMITSUMI
FIGURE 50 MINEBEAMITSUMI: COMPANY SNAPSHOT
FIGURE 51 MINEBEAMITSUMI: SWOT ANALYSIS
12. 2.5 JOHNSON ELECTRIC
2.5 JOHNSON ELECTRIC
РИСУНОК 52 JOHNSON ELECTRIC: КРАТКИЙ ОБЗОР КОМПАНИИ
Рисунок 53 Johnson Electric: SWOT -анализ
12.2.6 Regal Beloit Corporation
Рисунок 54 Regal Beloit Corporation: Company Snapshot
12.2.7 Electrocraft
12.2.8 Maxon Motor
12.2.9 Восточный мотор
12.2.10 Portescap
12.2.1111111111111111111111111111111111111111111111111н1н ARC SYSTEMS
12.2.12 BUHLER MOTOR
12.2.13 ANAHEIM AUTOMATION
12.2.14 LINIX MOTOR
12.2.15 Moons Industries
12.2.16 Teco Electric
12.2.17 Shenzhen Funtain Motor
12.2.18 Jiangsu Wheatstone Electrical Technology
12.2.19 Assun Motor
12.2.20. , Последние события, SWOT-анализ, Право на победу может быть не реализовано в случае компаний, не зарегистрированных на бирже.
13.1 Понимание отраслевых экспертов
13. 2 Руководство по обсуждению
2 Руководство по обсуждению
13.3 Магазин знаний: Рыночный портал подписки
13.4 Доступные настройки
13.5 Связанные отчеты
13.6. Для сбора информации о рынке и рынке аналогов было проведено исчерпывающее вторичное исследование. Следующим шагом было подтверждение этих выводов, предположений и размера рынка с помощью отраслевых экспертов по всей цепочке создания стоимости посредством первичных исследований. Для оценки общего размера рынка использовались как нисходящий, так и восходящий подходы. После этого была проведена разбивка рынка и триангуляция данных для оценки размера рынка сегментов и подсегментов. Secondary Research

Первичное исследование

Размер мирового рынка автомобильных бесщеточных двигателей постоянного тока: подход «снизу вверх» Процессы оценки размера рынка, как объяснялось выше, рынок был разделен на сегменты и подсегменты. Чтобы завершить общий процесс проектирования рынка и получить точную статистику по каждому рыночному сегменту и подсегменту, везде, где это было применимо, применялись процедуры триангуляции данных и разбивки рынка. Данные были триангулированы путем изучения различных факторов и тенденций как со стороны спроса, так и со стороны предложения.
Цели отчета
- Определить, описать и спрогнозировать мировой рынок по типу, скорости, конечному пользователю и региону
- Чтобы предоставить подробную информацию об основных факторах, влияющих на рост рынка цифровых нефтяных месторождений (движущие силы, ограничения, возможности и отраслевые проблемы)
- Стратегический анализ рынка с точки зрения индивидуальных тенденций роста, перспектив и вклада каждого сегмента в рынок
- Для анализа воздействия COVID-19на рынке для оценки размера рынка
- Для анализа рыночных возможностей для заинтересованных сторон и деталей конкурентной среды для лидеров рынка
- Для прогнозирования роста рынка по основным регионам (Азиатско-Тихоокеанский регион, Европа, Северная Америка, Южная Америка, Ближний Восток и Африка)
- Стратегический профиль ключевых игроков и всесторонний анализ их доли рынка и основных компетенций
- Для отслеживания и анализа конкурентных разработок, таких как контракты и соглашения, расширение, разработка новых продуктов, слияния и поглощения и партнерства на рынке
Доступные настройки:
С учетом данных о рынке MarketsandMarkets предлагает настройки в соответствии с конкретными потребностями клиентов. Для этого отчета доступны следующие параметры настройки:
Для этого отчета доступны следующие параметры настройки:
Региональный анализ
- Дальнейший анализ по регионам или странам
Информация о компании
- Подробный анализ и профилирование дополнительных игроков рынка (до 5)
Все о бесщеточных двигателях постоянного тока
Создание движения с помощью электричества стало возможным в значительной степени благодаря изобретению электродвигателя.
Эти очень полезные машины претерпели обширную диверсификацию благодаря открытиям последних лет, и теперь они представлены во многих вариантах в зависимости от источника питания, механизма действия и применения. Одной из таких конструкций является бесщеточный двигатель постоянного тока (BLDC) — усовершенствование обычного двигателя постоянного тока, в котором используются многие принципы двигателей переменного тока для создания точного и мощного крутящего момента. В этой статье будут рассмотрены основные функциональные возможности конструкции двигателя BLDC, как он работает для создания мощности и каковы наилучшие приложения для этого класса двигателей.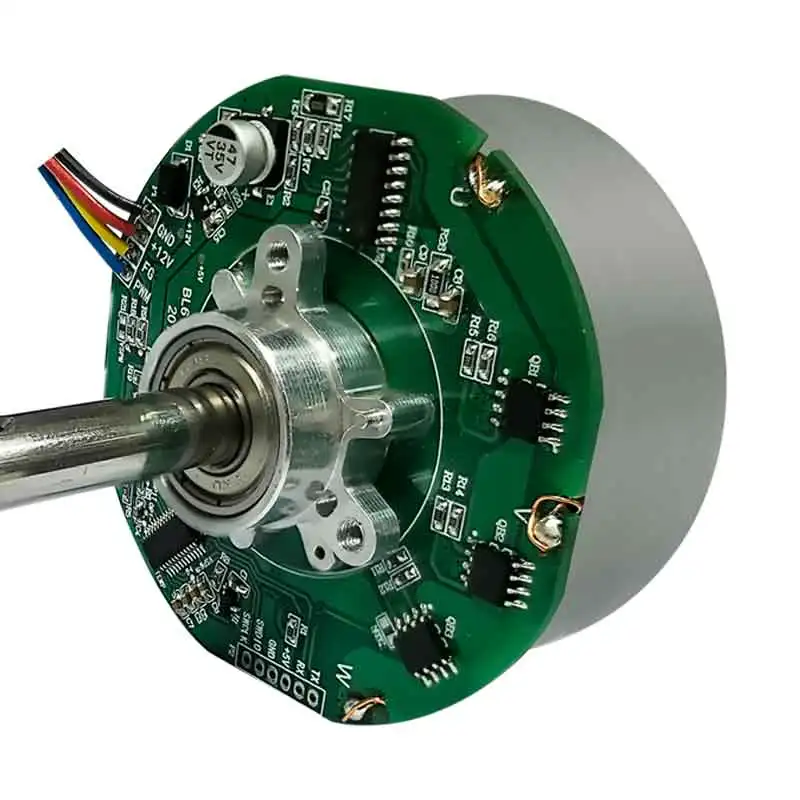 Используя это руководство, читатели получат лучшее представление о том, когда выбрать один из этих двигателей и как указать их для любого конкретного проекта.
Используя это руководство, читатели получат лучшее представление о том, когда выбрать один из этих двигателей и как указать их для любого конкретного проекта.
Что такое бесщеточные двигатели постоянного тока (BLDC)?
Двигатели
BLDC являются близкими родственниками двигателей с постоянными магнитами, щеточными двигателями постоянного тока и синхронными двигателями и имеют многие из тех же принципов работы (дополнительную информацию можно найти в наших статьях о двигателях с постоянными магнитами и синхронных двигателях). Двигатель BLDC отличается от щеточного двигателя постоянного тока тем, что, что неудивительно, в нем не используются щетки и коллекторные кольца. Вместо этого они коммутируются электрически; то есть они используют физику электромагнетизма для передачи крутящего момента на выходной вал. Они делают это, используя постоянные магниты на своем роторе, которые магнитно притягиваются к обмоткам питаемой катушки в статоре. При этом скорость вращения можно изменять, просто регулируя величину и направление тока в катушках статора, и нет необходимости в щетках или механических коммутаторах.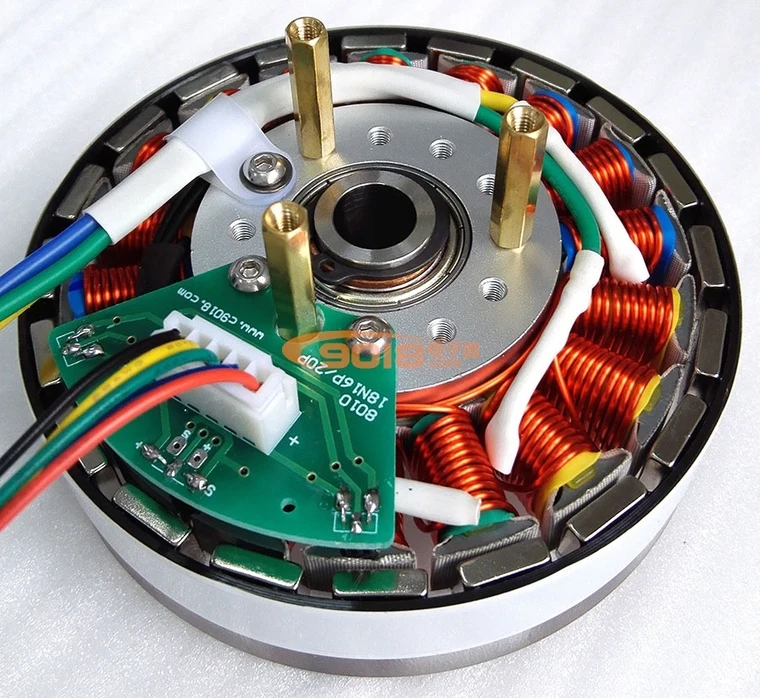 Они вращаются с частотой, пропорциональной этому току, что означает, что они являются типом синхронного двигателя и в этом отношении имеют преимущество перед асинхронными конструкциями, такими как асинхронные двигатели (более подробную информацию об асинхронных двигателях можно найти в нашей статье все об асинхронных двигателях). Они имеют простую конструкцию, более длительный срок службы, чем модели с щетками, более высокий выходной крутящий момент и используются во многих продуктах, таких как автомобильные стекла, вакуумные машины, вентиляторы и многое другое.
Они вращаются с частотой, пропорциональной этому току, что означает, что они являются типом синхронного двигателя и в этом отношении имеют преимущество перед асинхронными конструкциями, такими как асинхронные двигатели (более подробную информацию об асинхронных двигателях можно найти в нашей статье все об асинхронных двигателях). Они имеют простую конструкцию, более длительный срок службы, чем модели с щетками, более высокий выходной крутящий момент и используются во многих продуктах, таких как автомобильные стекла, вакуумные машины, вентиляторы и многое другое.
Как работают двигатели BLDC?
Двигатели
BLDC отличаются от других двигателей постоянного тока тем, что их ротор не содержит катушек и просто сделан из постоянного магнита. Статор содержит катушки, которые индуцируют магнитное поле, когда через них проходит ток. Когда любая катушка статора (или «полюс») находится под напряжением, ротор выравнивает с ней свое постоянное магнитное поле; проще говоря, ротор будет притягиваться к любому полюсу статора, находящемуся под напряжением. Конструкторы умело создали электронные коммутаторы, которые последовательно включают и выключают полюса статора вокруг ротора, таким образом приводя ротор в движение и вызывая вращение на выходном валу. Это похоже на то, как переменный ток создает вращающееся магнитное поле в двигателях переменного тока, за исключением того, что двигатели BLDC используют постоянный ток и электронно переключают ток вперед и назад в каждом полюсе, имитируя фазы переменного тока. Хотя электронная коммутация не создает действительно вращающегося магнитного поля, она дает оператору точный контроль над эффективной скоростью двигателя, чего не могут сделать асинхронные двигатели и другие конструкции переменного тока. Регулируя величину и направление тока, протекающего через статор, операторы могут генерировать диапазон скоростей и крутящих моментов, синхронизированных с входной частотой.
Конструкторы умело создали электронные коммутаторы, которые последовательно включают и выключают полюса статора вокруг ротора, таким образом приводя ротор в движение и вызывая вращение на выходном валу. Это похоже на то, как переменный ток создает вращающееся магнитное поле в двигателях переменного тока, за исключением того, что двигатели BLDC используют постоянный ток и электронно переключают ток вперед и назад в каждом полюсе, имитируя фазы переменного тока. Хотя электронная коммутация не создает действительно вращающегося магнитного поля, она дает оператору точный контроль над эффективной скоростью двигателя, чего не могут сделать асинхронные двигатели и другие конструкции переменного тока. Регулируя величину и направление тока, протекающего через статор, операторы могут генерировать диапазон скоростей и крутящих моментов, синхронизированных с входной частотой.
Работа этих двигателей зависит от электронной коммутации. Это означает, что они используют датчики (часто датчики на эффекте Холла) для определения положения вала в любой момент времени, а также широтно-импульсную модуляцию (ШИМ) и другие контроллеры цепей для переключения тока на каждую обмотку в нужное время. Это электрический аналог щеточных/коллекторных колец коллекторного двигателя постоянного тока, которые используются для механического переключения тока с обмотки на обмотку. Таким образом, двигатели BLDC не имеют трения, не производят пыли от щеток и работают тише, чем двигатели постоянного тока с щетками.
Это электрический аналог щеточных/коллекторных колец коллекторного двигателя постоянного тока, которые используются для механического переключения тока с обмотки на обмотку. Таким образом, двигатели BLDC не имеют трения, не производят пыли от щеток и работают тише, чем двигатели постоянного тока с щетками.
Технические характеристики двигателя BLDC
В этой статье подробно описаны некоторые общие характеристики, используемые при выборе двигателя BLDC. Имейте в виду, что этот список не является исчерпывающим и содержит только наиболее важные характеристики, которые следует учитывать при выборе двигателя, подходящего для вашей работы.
Пиковый, заблокированный ротор и номинальный крутящий момент
Пиковый крутящий момент — это максимальный крутящий момент, создаваемый двигателем, обычно только в течение короткого времени во время пуска/торможения. Иногда его оценивают по отношению к крутящему моменту заблокированного ротора, также известному как непрерывный крутящий момент, когда ротор находится в остановленном состоянии (нулевая скорость).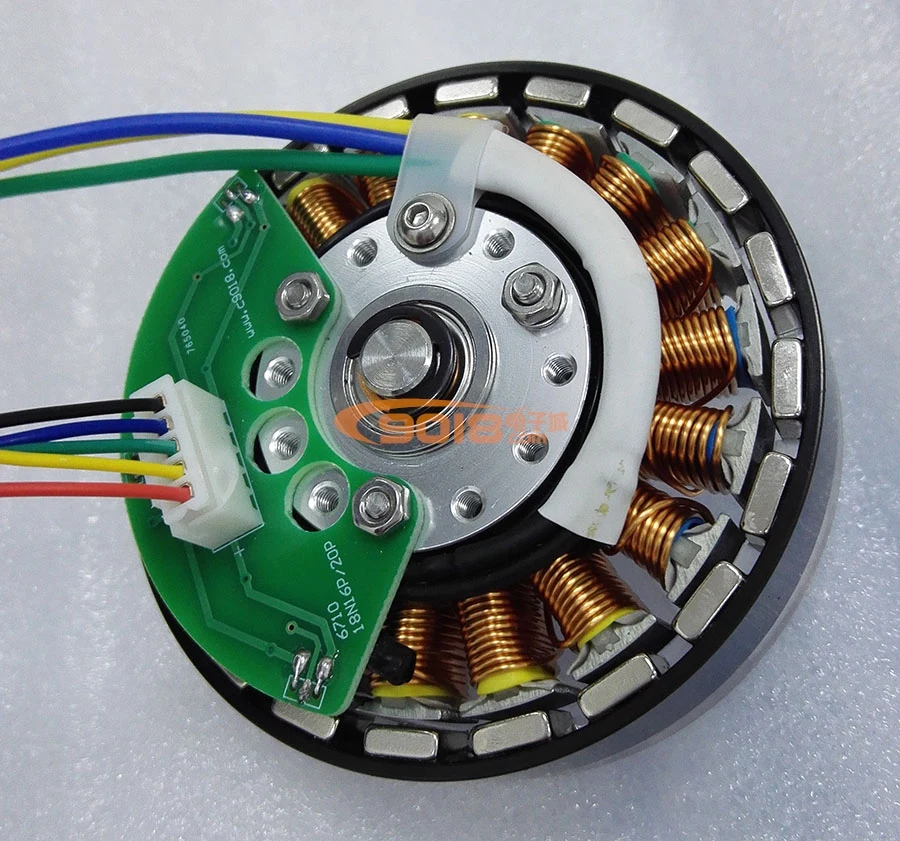 Номинальный крутящий момент представляет собой непрерывный крутящий момент на предлагаемой скорости и является хорошим показателем производительности двигателя, когда двигатель достигает номинальной скорости (скоростей). Полезно знать, что по мере увеличения скорости двигателя крутящий момент обычно уменьшается, и наоборот. Таким образом, крутящий момент заблокированного ротора является одной крайностью этой аналогии, а скорость холостого хода — другой, где оптимальная скорость и крутящий момент двигателя находятся где-то между этими двумя значениями.
Номинальный крутящий момент представляет собой непрерывный крутящий момент на предлагаемой скорости и является хорошим показателем производительности двигателя, когда двигатель достигает номинальной скорости (скоростей). Полезно знать, что по мере увеличения скорости двигателя крутящий момент обычно уменьшается, и наоборот. Таким образом, крутящий момент заблокированного ротора является одной крайностью этой аналогии, а скорость холостого хода — другой, где оптимальная скорость и крутящий момент двигателя находятся где-то между этими двумя значениями.
Размер двигателя
Размер двигателя — это общие размеры двигателя, его форм-фактор и любая другая важная геометрическая информация. Двигатели BLDC бывают разных форм, и их размер частично определяет их производительность в данном приложении.
Номинальное (номинальное) напряжение
Знание номинального напряжения двигателя поможет выбрать оптимальный источник питания. Эта спецификация напряжения показывает рекомендуемое напряжение возбуждения для двигателя и может быть постоянным: 12 В, 24 В, 48 В и т. д. для двигателей постоянного тока. Это номинальное напряжение может быть немного превышено, но следует понимать, что слишком высокое напряжение повредит катушки статора.
д. для двигателей постоянного тока. Это номинальное напряжение может быть немного превышено, но следует понимать, что слишком высокое напряжение повредит катушки статора.
Скорость без нагрузки и диапазон скоростей
Скорость холостого хода — это скорость вращения ротора при отсутствии внешнего крутящего момента под нагрузкой. Подобно крутящему моменту при заблокированном роторе, он представляет собой крайний случай, когда двигатель механически ничего не приводит в действие и не рассчитан на постоянную работу на этой скорости. Диапазон скоростей — это рекомендуемые обороты, с которыми должен работать двигатель, и часто задается как несколько оборотов в минуту ± процент при номинальном напряжении, поскольку входная мощность напрямую связана со скоростью двигателя в двигателях BLDC. Диапазон скоростей наряду с номинальным крутящим моментом является лучшим показателем производительности и ограничивает безопасные возможности двигателя BLDC.
Применение и критерии выбора
Электродвигатели
BLDC благодаря электронной коммутации обладают высокой эффективностью и служат намного дольше, чем другие электродвигатели. По этой причине они лучше всего подходят для непрерывных операций, когда двигатель будет питаться в течение длительных периодов времени: к таким примерам относятся компьютерные вентиляторы, кондиционеры, стиральные машины, жесткие диски и другие машины, которым требуется непрерывная контролируемая мощность.
По этой причине они лучше всего подходят для непрерывных операций, когда двигатель будет питаться в течение длительных периодов времени: к таким примерам относятся компьютерные вентиляторы, кондиционеры, стиральные машины, жесткие диски и другие машины, которым требуется непрерывная контролируемая мощность.
Ниже в Таблице 1 приведено качественное сравнение бесщеточных двигателей постоянного тока, коллекторных двигателей и асинхронных двигателей переменного тока, чтобы показать преимущества использования бесщеточных двигателей постоянного тока по сравнению с более традиционными моделями:
Функция | BLDC двигатель | Коллекторный двигатель постоянного тока | Асинхронный двигатель переменного тока | Дополнительные комментарии |
Эффективность | Высокий | Умеренный | Умеренный | Н/Д |
Характеристики скорости/крутящего момента | Квартира | Умеренно плоский | Нелинейный (низкий крутящий момент на низких скоростях) | «Плоская» означает линейную кривую крутящий момент-скорость |
Отношение выходной мощности к размеру корпуса | Высокий | Умеренный | Умеренный | Н/Д |
Динамический отклик | Быстро | Медленный | Медленный | Н/Д |
Диапазон скоростей | Высокий | Низкий | Умеренный/Низкий | ЧРП увеличивают запас хода асинхронных двигателей |
Срок службы | Длинный | Короткий | Длинный | Зависит от сборки и ответственного использования |
Как видно выше, совершенно очевидно, что бесщеточные двигатели постоянного тока имеют много преимуществ по сравнению как с бесщеточными, так и с асинхронными двигателями переменного тока. Однако за эти преимущества приходится платить буквально; из-за своей конструкции и необходимости в электрических схемах коммутации эти двигатели значительно дороже, чем большинство других электродвигателей того же размера. Таким образом, хотя они обеспечивают отличные характеристики по сравнению с более популярными двигателями, их сдерживает финансовый барьер входа. Если деньги не имеют значения, а требуется непрерывная, мощная и точная выходная мощность, двигатель BLDC может быть просто инструментом для работы.
Однако за эти преимущества приходится платить буквально; из-за своей конструкции и необходимости в электрических схемах коммутации эти двигатели значительно дороже, чем большинство других электродвигателей того же размера. Таким образом, хотя они обеспечивают отличные характеристики по сравнению с более популярными двигателями, их сдерживает финансовый барьер входа. Если деньги не имеют значения, а требуется непрерывная, мощная и точная выходная мощность, двигатель BLDC может быть просто инструментом для работы.
Резюме
В этой статье представлено понимание того, что такое бесколлекторные двигатели постоянного тока и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Источники:
- http://srjcstaff.santarosa.edu/~lwillia2/2B/2Bch30. pdf
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- http://www.ece.ua.edu/courses/material/EE410-Wms2/Electric%20motors.pdf
- http://www2.mae.ufl.edu/designlab/Class%20Projects/Background%20Information/Electric%20DC%20motors.htm
- http://fab.cba.mit.edu/classes/961.04/topics/бесщеточный
- https://www.monolithicpower.com/pub/media/document/Бесщеточный
- https://www.e-jpc.com/markets-applications/
 pdf
pdfг.
Другие товары для двигателей
- Все о двигателях с постоянными магнитами: что это такое и как они работают
- Все о двигателях постоянного тока с обмоткой серии — что это такое и как они работают
- Все о шунтирующих двигателях постоянного тока — что это такое и как они работают
- Все о шаговых двигателях — что это такое и как они работают
- и серводвигатели — в чем разница?
- Все о контроллерах двигателей переменного тока — что это такое и как они работают
- Синхронные двигатели и асинхронные двигатели — в чем разница?
- и щеточные двигатели — в чем разница?
- Кто изобрел паровой двигатель? Урок промышленной истории
- Все о двигателях с электронным управлением — что это такое и как они работают
- и серводвигатели — в чем разница?
- и двигатели постоянного тока — в чем разница?
- Все о контроллерах серводвигателей — что это такое и как они работают
- Что такое трехфазный двигатель и как он работает?
- ECM Motors и PSC Motors — в чем разница?
- Все о устройствах плавного пуска двигателей — что это такое и как они работают
- Все о контроллерах двигателей постоянного тока — что это такое и как они работают
- Основы испытаний двигателей (и роторов)
- Что такое штамповка двигателя и как это работает?
- Все о двигателях с дробной мощностью
г.
Шаговые двигатели
Бесщеточные двигатели
г.
Двигатели постоянного тока
Шаговые двигатели
г.
Другие товары от Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Маленькие бесколлекторные двигатели — Малые щеточные двигатели EC
УПРАВЛЕНИЕ ДВИЖЕНИЕМ НА СКОРОСТИ TECHNOLOGY™
1. 877.737.8698
Валюта
USD — доллар США
- CAD — канадский доллар
877-378-0240
Свяжитесь с нами
Поиск
Поиск
Войти
Свяжитесь с нами
Переключить навигацию
Небольшие бесщеточные ЕС-двигатели Maxon с электронной коммутацией отличаются превосходными характеристиками крутящего момента, высокой мощностью, чрезвычайно широким диапазоном скоростей и исключительно долгим сроком службы. Превосходная управляемость двигателей делает возможным высокоточное позиционирование приводов.
Экономичная серия EC называется Maxon EC-max. Когда пространство ограничено, плоские двигатели Maxon являются решением. Чтобы получить подробную информацию о бесколлекторных серводвигателях Maxon, нажмите здесь . Компания Electromate поставляет небольшие бесколлекторные двигатели, подобные двигателям Maxon, в четыре различных промышленных региона Канады: Атлантические провинции, Центральную Канаду, Прерии и Западное побережье.
Электродвигатели Maxon EC Характеристики:
г. |
г. |
Бесщеточные мини-двигатели Maxon
Мы предлагаем:
ECX Speed
Серия бесщеточных двигателей ECX SPEED оптимизирована для работы на высоких скоростях (до 120 000 об/мин). Доступны несколько классов производительности для вашего применения: стандартный, высокой мощности, стерилизуемый (до 2000 циклов) или с керамическими подшипниками для высоких скоростей. Выберите механический и электрический интерфейс онлайн. Программа ECX полностью настраивается и готова к отправке всего через 11 дней. Нажмите, чтобы просмотреть короткое видео о новом бесщеточном серводвигателе ECX Speed.
Узнать больше
EC
Бесколлекторные двигатели Maxon EC обеспечивают высокоскоростную динамичную работу и длительный срок службы. ЕС-двигатели Maxon с электрической коммутацией служат дольше, чем их аналоги в диапазоне постоянного тока. Долгий срок службы, обеспечиваемый бесщеточной конструкцией, можно особенно эффективно использовать при использовании предварительно нагруженных шарикоподшипников. ЕС-двигатели имеют отличные характеристики крутящего момента, высокую мощность и широкий диапазон скоростей до 100 000 об/мин.
Узнать больше
EC-i
Бесщеточные двигатели Maxon EC обеспечивают высокоскоростную динамичную работу и длительный срок службы. ЕС-двигатели Maxon с электрической коммутацией служат дольше, чем их аналоги в диапазоне постоянного тока. Долгий срок службы, обеспечиваемый бесщеточной конструкцией, можно особенно эффективно использовать при использовании предварительно нагруженных шарикоподшипников. ЕС-двигатели имеют отличные характеристики крутящего момента, высокую мощность и широкий диапазон скоростей до 100 000 об/мин.
Узнать больше
EC-max
Maxon EC-max — экономичная линия EC. Благодаря бесщеточной конструкции приводы хорошо подходят для длительной эксплуатации. Двигатель Maxon EC-max является дальнейшим развитием принципа, лежащего в основе программ A-max и RE-max. Автоматизированное производство обеспечивает низкие затраты. Тем не менее, вы все равно можете адаптировать продукты к своим потребностям,
Узнать больше
EC-4pole
Maxon EC-4pole поднимает планку. Мощные 4-полюсные двигатели обеспечивают максимальную производительность на единицу объема и веса. Мощные 4-полюсные двигатели обеспечивают максимальную производительность на единицу объема и веса и облегчают принятие решения о покупке благодаря непревзойденному сроку службы.
Подробнее
EC-Flat
Бесщеточные двигатели постоянного тока плоской конструкции. Ø 9,2–90 мм, 0,5–600 Вт. Высокая производительность по привлекательной цене.