Содержание
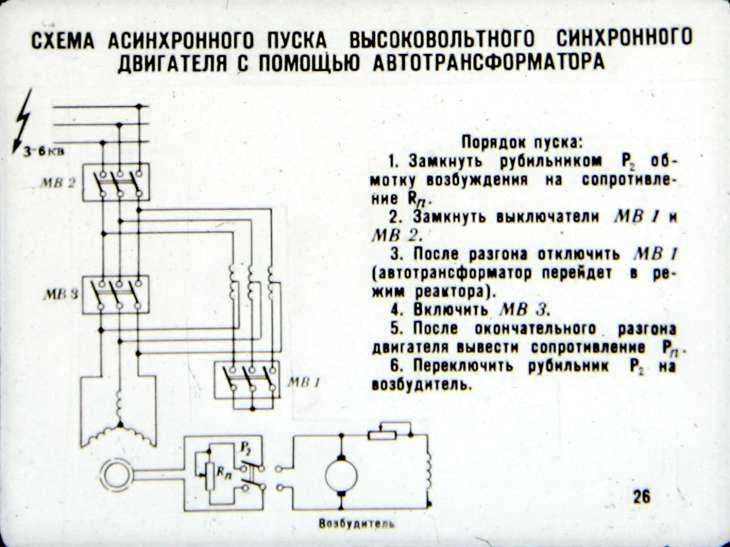
АвтотрансформаторныЙ пуск
Автотрансформаторный
пуск осуществляется по схеме (рис
1.) в следующем порядке. Сначала включаются
выключатели В1
и В2,
и на двигатель через автотрансформатор
AT
подается пониженное напряжение.
После достижения двигателем определенной
скорости выключатель В2
отключается, и двигатель получает
питание через часть обмотки
автотрансформатора AT,
который в этом случае работает как
реактор. Наконец включается выключатель
В3,
в результате чего двигатель получает
полное напряжение.
Выключатель
В1
должен быть выбран на отключающую
мощность при коротком замыкании, а
выключатели В2
и ВЗ
могут иметь меньшие отключающие мощности.
Пусковые автотрансформаторы
рассчитываются на кратковременную
работу. Согласно ГОСТ 3211—46, пусковые
автотрансформаторы должны иметь
ответвления, соответствующие величинам
вторичного напряжения, равным 73, 64 и 55%
от первичного при прямой схеме включения
и 45, 36 и 27% при
Рис 1.
Рис
2.
обратной
схеме включения (рис. 2). В каждом конкретном
случае выбирается подходящая ступень
напряжения.
Если
пусковой автотрансформатор понижает
пусковое напряжение двигателя в kат
раз, то пусковой ток в двигателе или на
стороне НН
автотрансформатора
Iп.д
уменьшается также в kат
раз, а пусковой ток на стороне ВН
автотрансформатора или в сети Iп.с
уменьшается в
раз. Пусковой момент
Mп,
пропорциональный квадрату напряжения
на зажимах двигателя, уменьшается также
в
раз.
Таким
образом, при автотрансформаторном пуске
Мп
и Iп.с
уменьшаются в одинаковое число раз. В
то же время при реакторном пуске
пусковой ток двигателей Iп.дявляется
также пусковым током в сети Iп. с
с
и пусковой момент Мп
уменьшается быстрее пускового тока
(в квадратичном отношении). Поэтому при
одинаковых величинах Iп.с
при автотрансформаторном пуске пусковой
момент будет больше. Однако это
преимущество автотрансформаторного
пуска достигается ценой значительного
усложнения и удорожания пусковой
аппаратуры. Поэтому автотрансформаторный
пуск применяется реже реакторного,
при более тяжелых условиях, когда
реакторный пуск не обеспечивает
необходимого пускового момента.
Пуск
переключением «звезда—треугольник»
может применяться в случаях, когда
выведены все шесть концов обмотки
статора и двигатель нормально работает
с соединением обмотки статора в
треугольник, например, когда двигатель
на 380/220 в
и с соединением обмоток Y/
работает от сети 220 в.
В этом случае при пуске обмотка статора
включается в звезду (нижнее положение
переключателя П),
а при достижении нормальной скорости
вращения переключается в треугольник
(верхнее положение переключателя
П).
При таком способе пуска по сравнению с
прямым пуском при соединении обмотки
в треугольник напряжение фаз обмоток
уменьшается в
раза, пусковой момент уменьшается в
раза,
пусковой ток в фазах обмотки уменьшается
в
раза, а в сети — в
раза.
Таким образом, рассматриваемый способ
пуска равноценен автотрансформаторному
пуску при
Недостатком
этого способа пуска по сравнению с
реакторным и автотрансформаторным
является то, что при пусковых переключениях
цепь двигателя разрывается, что связано
с возникновением коммутационных
перенапряжений. Этот способ ранее широко
применялся при пуске низковольтных
двигателей, однако с увеличением
мощности сетей потерял свое прежнее
значение и в настоящее время используется
сравнительно редко.
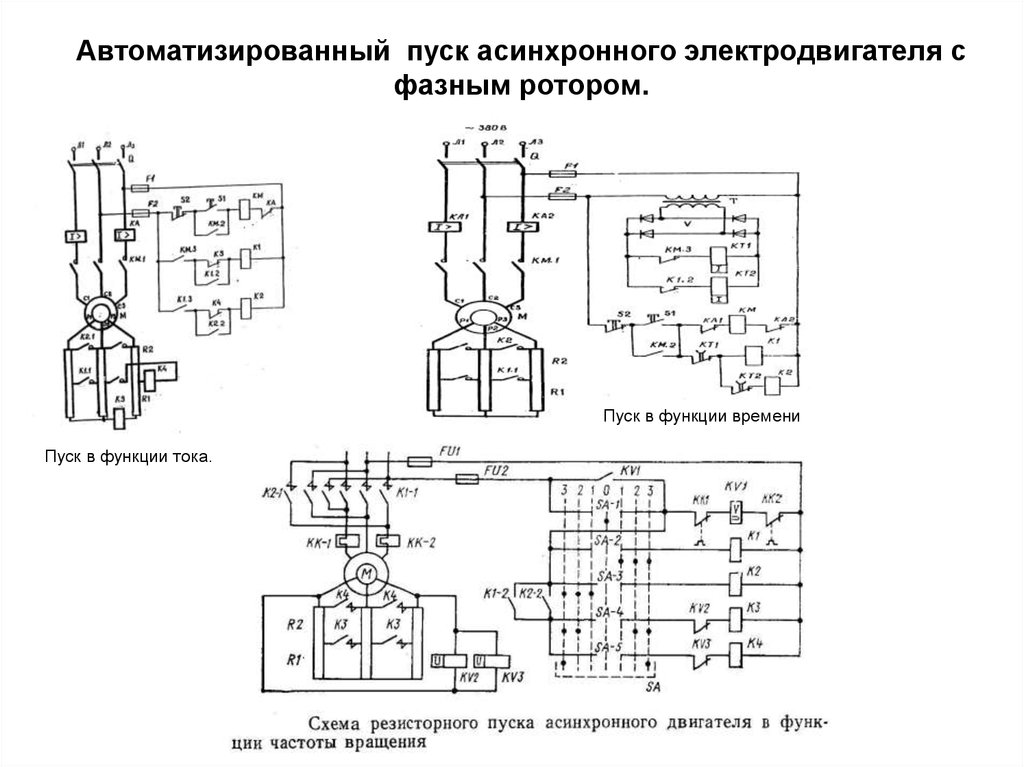
Пуск двигателя с фазным ротором с помощью
пускового реостата.
Двигатели
с фазным ротором применяются значительно
реже двигателей с короткозамкнутым
ротором. Они используются в следующих
случаях:
1)
когда двигатели с короткозамкнутым
ротором неприемлемы по условиям
регулирования их скорости вращения;
2)
когда статический момент сопротивления
на валу при пуске Мст
велик и поэтому асинхронный двигатель
с короткозамкнутым ротором с пуском
при пониженном напряжении неприемлем,
а прямой пуск такого двигателя недопустим
по условиям воздействия больших пусковых
токов на сеть;
3)
когда приводимые в движение массы
настолько велики, что выделяемая во
вторичной цепи двигателя тепловая
энергия вызывает недопустимый нагрев
обмотки ротора в виде беличьей клетки.
Пуск
двигателей с фазным ротором производится
с помощью пускового реостата в цепи
ротора. Применяются проволочные, с
литыми чугунными элементами, а также
жидкостные реостаты. По условиям нагрева
реостаты рассчитываются на кратковременную
работу. Сопротивления металлических-
реостатов для охлаждения обычно помещают
в бак с трансформаторным маслом.
Металлические реостаты являются
ступенчатыми, и переключение с одной
ступени на другую осуществляется либо
вручную с помощью рукоятки контроллера,
существенным элементом которого является
вал с укрепленными на нем контактами,
либо же автоматически (в автоматизированных
установках) с помощью контакторов или
контроллера с электрическим приводом.
Жидкостный реостат представляет собой
сосуд с электролитом (например, водный
раствор соды или поваренной соли), в
который опущены электроды.
Сопротивление
реостата регулируется путем изменения
глубины погружения электродов.
Рассмотрим
пуск двигателя с фазным ротором с помощью
ступенчатого металлического реостата,
управляемого контакторами К.
Перед
пуском щетки должны быть опущены на
контактные кольца ротора, а все
ступени реостата включены. Далее в
процессе пуска поочередно включаются
контакторы КЗ,
К.2, К1.
Характеристики вращающего момента
двигателя М =
f
(s)
и вторичного тока I2=
f
(s)
при работе на разных ступенях реостата
изображены на рис.
Предположим,
что сопротивления ступеней пускового
реостата и интервалы времени переключения
ступеней подобраны так, что момент
двигателя М
при пуске меняется в пределах от
некоторого Ммакс
до некоторого Ммин
и при включении в сеть
(кривая
3
на рис.а). В начале пуска двигатель
работает по характеристике 3,
ротор приходит во вращение, скольжение
s
начинает уменьшаться, и при s=s3,
когда М=Mмин,
производится
переключение реостата на вторую ступень.
При этом двигатель будет работать по
характеристике 2,
и при дальнейшем разбеге двигателя
скольжение уменьшится от s=s3,,
до s=s2,
а момент — от значения М
= Ммакс
до М
= Ммин.
Затем производится переключение на
первую ступень и т. д. После выключения
последней
ступени реостата
двигатель переходит на работу по
естественной характеристике 0
и достигает установившейся скорости
вращения.
При
наличии у двигателя короткозамыкающего
механизма после окончания пуска щетки
с помощью этого механизма поднимаются
с контактных колец и кольца замыкаются
накоротко, а реостат возвращается в
пусковое положение. Тем самым пусковая
аппаратура приводится в готовность
к следующему пуску. Необходимо отметить,
что дистанционное управление
короткозамыкающим механизмом
контактных колец сложно осуществить;
это затрудняет автоматическое управление
двигателем. Поэтому в последнее время
Поэтому в последнее время
фазные асинхронные двигатели строятся
без таких механизмов. При этом щетки
постоянно налегают на контактные кольца,
что несколько увеличивает потери
двигателя и износ щеток. Количество
ступеней пускового реостата с целью
упрощения схемы пуска и удешевления
аппаратуры в автоматизированных
установках выбирается небольшим (обычно
2—3 ступени).
Пусковые
характеристики асинхронного двигателя
при реостатном пуске наиболее
благоприятны, так как высокие значения
моментов достигаются при невысоких
значениях пусковых токов.
Самозапуск
асинхронных двигателей.
В
электрических сетях в результате
коротких замыканий случаются
кратковременные, длительностью до
нескольких секунд, большие понижения
напряжения или перерывы питания.
Включенные в сеть асинхронные двигатели
при этом начинают затормаживаться и
чаще всего полностью останавливаются.
При восстановлении напряжения начинается
одновременный самозапуск не отключившихся
от сети двигателей.
Такой
самозапуск двигателей способствует
быстрейшему восстановлению нормальной
работы производственных механизмов и
поэтому целесообразен, а в ряде случаев
даже чрезвычайно желателен. Однако
одновременный самозапуск большого
количества асинхронных двигателей
загружает сеть весьма большими токами,
что вызывает в ней большие падения
напряжения и задерживает процесс
восстановления нормального напряжения.
Время
самозапуска двигателей при этом
увеличивается, а в ряде случаев величина
пускового момента недостаточна для
пуска двигателя. Кроме того, самозапуск
некоторых двигателей в подобных условиях
недопустим, или невозможен (например,
двигатели с фазным ротором с пуском с
помощью реостата и двигатели с
короткозамкнутым ротором с пуском с
помощью реакторов и автотрансформаторов,
не снабженные специальной автоматической
аппаратурой для автоматического
самозапуска).
Поэтому
целесообразно возможность самозапуска
использовать только для двигателей
наиболее ответственных производственных
механизмов, а все остальные двигатели
снабдить релейной защитой для их
отключения от сети при глубоких падениях
напряжения.
Регулирование скорости вращения
асинхронных двигателей с короткозамкнутым
ротором
Скорость
вращения ротора асинхронного двигателя
Способы
регулирования скорости вращения
асинхронных двигателей можно подразделить
на два класса:
1)
регулирование скорости вращения
первичного магнитного поля
что
достигается либо регулированием
первичной частоты f1,
либо изменением числа пар полюсов р
двигателя;
2)
регулирование скольжения двигателя s
при
n/
В
первом случае к. п. д. двигателя остается
высоким, а во втором случае к. п. д.
снижается тем больше, чем больше s,
так как при этом мощность скольжения
теряется
во вторичной цепи двигателя (мощность
скольжения используется полезно
только в каскадных установках).
Регулирование
скорости изменением первичной частоты
Регулирование
скорости изменением первичной частоты
(частотное регулирование) требует
применения источников питания с
регулируемой частотой (синхронные
генераторы с переменной скоростью
вращения, ионные или полупроводниковые
преобразователи частоты и др.). Поэтому
данный способ регулирования используется
главным образом в случаях, когда для
целых групп двигателей необходимо
повышать (п
> 3000 об/мин)
скорости вращения (например, ручной
металлообрабатывающий инструмент,
некоторые механизмы деревообрабатывающей
промышленности и др.) или одновременно
и плавно их регулировать (например,
двигатели рольгангов мощных прокатных
станов и др.).
С
развитием полупроводниковых
преобразователей все более перспективным
становится также индивидуальное
частотное регулирование скорости
вращения двигателей. Схему
короткозамкнутого асинхронного двигателя
с частотным управлением при помощи
полупроводниковых преобразователей
можно получить, если заменить явнополюсный
ротор на ротор с обмоткой в виде беличьей
клетки и питать эту схему от сети
переменного тока через полупроводниковый
выпрямитель. Управление инвертором при
Управление инвертором при
этом производится особым преобразователем
частоты вне зависимости от положения
ротора двигателя. Величина напряжения
регулируется с помощью выпрямителя.
Если
пренебречь относительно небольшим
падением напряжения в первичной цепи
асинхронного двигателя, то
Существенное
изменение величины потока Ф при
регулировании п
нежелательно, так как увеличение Ф
против нормального вызывает увеличение
насыщения магнитной цепи и сильное
увеличение намагничивающего тока, а
уменьшение Ф вызывает недоиспользование
машины, уменьшение перегрузочной
способности и увеличение тока /.а при
том же значении М
и т. д. Поэтому в большинстве случаев
целесообразно поддерживать Ф
= const.
При этом одновременно с регулированием
частоты пропорционально ей необходимо
изменять также напряжение, т. е.
поддерживать
Отступление от этого
правила целесообразно только в случаях,
когда Мст быстро уменьшается
с уменьшением п (например, приводы
вентиляторов, когда
).
В этом случае более быстрое уменьшение
U1 по сравнению
с f1 вызывает
уменьшение Ф и улучшает энергетические
показатели двигателя и в то же время
уменьшение М,п с точки зрения
перегрузочной способности не опасно.
При
широком диапазоне регулирования
правильнее поддерживать
К
недостаткам частотного регулирования
относится громоздкость и высокая
стоимость питающей установки.
Регулирование
скорости изменением
числа
пар полюсов
Регулирование
скорости изменением числа пар полюсов
р
используется обычно, для .двигателей
с короткозамкнутым ротором, так как при
этом требуется изменять р
только для обмотки статора. Изменять р
можно двумя способами:
1)
применением на статоре нескольких
обмоток, которые уложены в общих пазах
и имеют разные числа пар полюсов р;
2)
применением обмотки специального типа,
которая позволяет получить различные
значения р
путем изменения (переключения) схемы
соединений обмотки.
Предложено
значительное количество различных
схем обмоток с переключением числа пар
полюсов, однако широкое распространение
из них получили только некоторые.
Применение нескольких обмоток
невыгодно,
так как при этом из-за ограниченного
места с пазах сечение проводников каждой
из обмоток нужно уменьшать, что приводит
к снижению мощности двигателя.
Использование обмоток с переключением
числа пар полюсов вызывает усложнение
коммутационной аппаратуры, в особенности,
если с помощью одной обмотки желают
получить более двух скоростей вращения.
Несколько ухудшаются также энергетические
показатели двигателей.
Двигатели
с изменением числа пар полюсов называются
многоскоростными. Обычно они выпускаются
на 2, 3 или 4 скорости вращения, причем
двухскоростные двигатели изготовляются
с одной обмоткой на статоре и с
переключением числа пар полюсов в
отношении р2
:
р1=
2 : 1, трехскоростные двигатели — с двумя
обмотками на статоре, из которых одна
выполняется с переключением
р2
:
р1=
2 : 1, четырехскоростные двигатели — с
двумя обмотками на статоре, каждая из
которых выполняется с переключением
числа пар полюсов в отношении 2:1. Например,
Например,
двигатель на f1
= 50 гц
с
синхронными скоростями вращения
1500/1000/750/500 об/мин
имеет
одну обмотку с переключением на 2р = 4 и
8 и другую обмотку с переключением
на 2р =
6 и 12.
Многоскоростные
двигатели применяются в металлорежущих
и деревообрабатывающих станках, в
грузовых и пассажирских лифтах, для
приводов вентиляторов и насосов п в
ряде других случаев.
Каждая
фаза обмотки с переключением числа пар
полюсов в отношении 2 : 1 состоит из двух
частей, или половинок, с одинаковым
количеством катушечных групп в каждой
части.
Когда
обе части обмотки обтекаются токами
одинакового направления, обмотка
создает магнитное поле с большим числом
полюсов (рис.а, 2р
=
4), а при изменении направления тока в
одной части обмотки на обратное число
полюсов уменьшается вдвое (рис. б
и в,
2р = 2).
Подобные переключения производятся во
всех фазах одновременно, и переключаемые
части обмотки могут соединяться
последовательно (рис. а и б) или параллельно
а и б) или параллельно
(рис. в).
Ширина
фазной зоны, занимаемой сторонами
катушек катушечной группы, и величина
шага обмотки в зубцовых делениях
одинаковы при обоих числах полюсов.
Поскольку, однако, при переключении
числа пар полюсов в отношении 2 : 1 полюсное
деление изменяется в два раза, то величина
фазной зоны в электрических градусах
и относительный шаг обмотки при этом
также изменяются в два раза.
Переключаемую
обмотку выполняют так, что при меньшем
числе пар полюсов (p1)
фазная зона
= 60° эл. Тогда при удвоенном числе пар
полюсов (
)
ширина этой зоны
= 120° эл
Нормальные
одной фазы обмотки с переключением
чередования фазных зон при одинаковом
направлении вращения магнитного поля
для обеих скоростей вращения должны
быть такими, как показано на рис.2
Рис
1.
Рис
2.
Из
рисунка видно, что, кроме изменения
направлений токов в зонах X,
Y,
Z
(рис. 2, а) на обратные (т. е. обращение их
2, а) на обратные (т. е. обращение их
в зоны А,
В, С),
для сохранения направления вращения
поля, а следовательно, и ротора при
переключении числа пар полюсов
(рис.2, б) необходимо также переключить
концы двух фаз обмотки (например, фазы
В
и С).
Обмотка
выполняется так, что ее шаг равен полному
(180° эл.) при большем числе полюсов (2p2),
так как кривая н. с. обмотки с зоной и
=120°
наиболее близка к синусоидальной при
полном шаге. Тогда при меньшем числе
полюсов относительный шаг
Из
сказанного следует, что обмотка с
переключением числа полюсов создает
н. с. с большей величиной высших гармоник
поля, чем нормальная трехфазная обмотка
с
=
60° и
.
Это приводит к некоторому ухудшению
энергетических показателей двигателей
с переключением числа полюсов по
сравнению с нормальными.
На
рис. 3 представлена наиболее часто
употребляемая схема обмоток с
переключением числа пар полюсов в
отношении р2
: p1
= 2 : 1.
Определим
мощности и моменты, развиваемые
двигателями с такими схемами обмоток
при неизменном линейном напряжении
сети Uл1
и наибольшем допустимом (номинальном)
токе в полуфазе обмотки
Пренебрегая разницей в условиях
охлаждения при изменении скорости
вращения, можно принять, что величина
одинакова при обеих скоростях вращения.
Приближенно можно считать, что коэффициенты
мощности и к. п. д. при одинаковых
значениях
для обеих скоростей вращения также
одинаковы. При указанных условиях
мощности на валу для схем рис. 3, а и б
соответственно равны:
Рис. 3.
Вид
механических характеристик двигателей
со схемой обмоток рис. 3 изображен на
рис.4
Рис 4.
При
переключении много скоростной обмотки
магнитные индукции на отдельных участках
магнитной цепи в общем случае изменяются,
что необходимо иметь в виду при
проектировании двигателя, чтобы, с
одной стороны, добиться по возможности
более полного использования материалов
двигателя, а с другой, не допустить
чрезмерного насыщения магнитной цепи.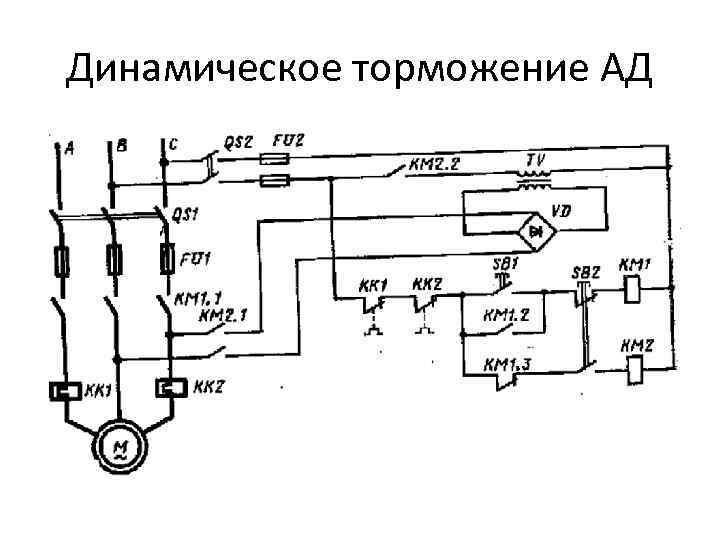
Вес
и стоимость многоскоростных двигателей
несколько больше, чем у нормальных
асинхронных двигателей такой же мощности.
Тем не менее это лучший и» наиболее
широко применяемый способ регулирования
скорости короткозамкнутых двигателей.
Регулирование скорости уменьшением
величины первичного напряжения.
При
уменьшении U1
момент двигателя изменяется пропорционально
и соответственно изменяются механические
характеристики (рис. 1),
Рис 1.
в
результате чего изменяются также
значения рабочих скольжении s1,s2,s3…
при данном виде зависимости
—
Очевидно, что регулирование s
в этом случае возможно в пределах 0
< s < sm.
Для получения достаточно большого
диапазона регулирования скорости
необходимо, чтобы активное сопротивление
цепи ротора и соответственно sм,
были достаточно велики (рис. 1, б).
1, б).
Следует
учитывать, что во вторичной цепи возникают
потери, равные мощности скольжения P2
и вызывающие повышенный нагрев
ротора.
Этот
метод регулирования скорости применяется
также для двигателей с фазным ротором,
причем в этом случае в цепь ротора
включаются добавочные сопротивления.
Рис.
2.
В
связи с пониженным к. п. д. и трудностями
регулирования напряжения рассматриваемый
метод применяется только для двигателей
малой мощности. При этом для регулирования
U1
можно использовать регулируемые
автотрансформаторы или сопротивления,
включенные последовательно в
первичную цепь. В последние годы для
этой цели все чаще применяют (рис. 2)
реакторы насыщения, регулируемые
путем подмагничивания постоянным током.
При
изменении величины постоянного тока
подмагничивания индуктивное
сопротивление реактора изменяется,
что приводит к изменению напряжения на
зажимах двигателя. Путем автоматического
Путем автоматического
регулирования тока подмагничивания
можно расширить зону регулирования
скорости в область s > sm
и получить при этом жесткие механические
характеристики.
Как рассчитать пусковой момент асинхронного двигателя
Содержание
- Как рассчитать пусковой момент асинхронного двигателя
- РАЗДЕЛ 4. РАСЧЕТ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ
- Расчет пусковых и регулировочных характеристик асинхронных двигателей
- Пусковые режимы асинхронных электродвигателей
- Пусковые режимы электрических моторов
- Пусковые режимы свободно вращающегося мотора
- Пусковые режимы переключением «звезда-треугольник»
- Каким моторам нужен пуск «звезда – треугольник»?
- Пусковые режимы с питанием части обмотки
- Резистивно-статорные пусковые режимы моторов
- Пусковые режимы автотрансформаторного хода
- Режим пуска асинхронных двигателей с фазным ротором
- Режим плавного пуска: «запуск с замедлением»
- Пусковые режимы с преобразователем частоты
- Техника плавного старта мотора на видео
- Видео
Как рассчитать пусковой момент асинхронного двигателя
В этом разделе мы разместили подборку статей посвященных такому важному в теории асинхронного привода понятию как момент. Здесь читатели найдут материалы раскрывающие значения отдельных терминов так или иначе связанных с понятием момента. Дополнительно мы организовали подборку статей с формулами по которым можно рассчитать конкретные значения моментов или построить их зависимости. Для большей наглядности сдесь же можно найти примеры иллюстирующие использование формул для рассчета того или иного показателя.
Здесь читатели найдут материалы раскрывающие значения отдельных терминов так или иначе связанных с понятием момента. Дополнительно мы организовали подборку статей с формулами по которым можно рассчитать конкретные значения моментов или построить их зависимости. Для большей наглядности сдесь же можно найти примеры иллюстирующие использование формул для рассчета того или иного показателя.
Из теории мы знаем что номинальный момент двигателя это момент на валу развиваемый при номинальной мощности и номинальных оборотах вала двигателя.
Как мы выясняли ранее под номинальным моментом понимают такой момент на валу электродвигателя, величина которого постоянна при постоянной номинальной частоте вращения вала.
Ранее мы рассмотрели подробно что представляет собой пусковой момент асинхронного электрического двигателя и по каким формулам можно посчитать значение пускового момента (новая статья). В этой статье мы приведем пример расчета значение пускового момента для линейки асинхронных электродвигателей. Для расчета мы будем использовать данные которые можно получить из паспорта двигателя: номинальный момент и кратность пускового момента по отношению к номинальному. Расчет будет выполнен по формуле:
Для расчета мы будем использовать данные которые можно получить из паспорта двигателя: номинальный момент и кратность пускового момента по отношению к номинальному. Расчет будет выполнен по формуле:
Прежде чем изложить и проанализировать формулы для вычисления пускового момента вспомним что это такое. Под пусковым моментом понимают момент на валу двигателя при определенных условиях. Ключевыми условиями являются равенство нулю скорости вращения ротора, установившееся значение тока и номинальное напряжение на обмотках двигателя.
В некоторых механизмах на начальном этапе запуска привода необходимо обеспечить максимальный пусковой момент. Для решения этой задачи хорошо подходит асинхронный двигатель с фазным ротором. Кратко опишем, что он собой представляет. Асинхронный электродвигатель с фазным ротором имеет ротор, в пазы которого уложена обмотка. Тип соединения обмотки ротора «звезда». Концы фаз обмотки ротора подключают к специальным контактным кольцам. Кольца вращаются вместе с валом двигателя. В цель обмоток ротора может быть включен реостат для пуска и регулирования. Подключение реостата выполняется с помощью щеточного контакта скользящего по кольцам. Данный реостат является добавочным активным сопротивлением. Это сопротивление одинаково для каждой из фаз обмотки.
Благодаря возможности включения реостата в обмотку ротора в данных двигателях имеется возможность обеспечивать максимальное значение пускового момента уже на этапе запуска двигателя. При этом удается снизить пусковые токи. Эти двигатели используют для приводов механизмов с высокими требованиями к уровню пускового момента (например, пуск под нагрузкой).
Дополнительная информация о пусковом моменте асинхронного двигателя
Важным понятием в области физики твердого тела является понятие крутящего момента. Особое значение имеет это понятия в области электропривода. В этой статье мы разберем базовые понятия, связанные с крутящим моментом.
Для начала заметим, что крутящий момент часто называют так же моментом силы, вращательным моментов, вертящим моментом и вращающим моментом. Все эти термины являются синонимами. Хотя в некоторых практических приложениях их следует различать. Например, в технических задачах под «вращающим моментом» понимают внешнее усилие, прикладываемое к объекту, а под «крутящим моментом» понимают внутренние усилия, которые возникают в объекте под действием приложенных нагрузок. В нашей статье мы будем использовать термин крутящий момент.
Момент нагрузки – момент, создаваемый вращающейся механической системой присоединенной к валу асинхронного двигателя. В качестве синонимов в литературе встречается термин момент сопротивления. Момент нагрузки зависит от геометрических и физических параметров тел входящих в кинематическую цепь, присоединенную к валу двигателя. Как правило, при расчете момент сопротивления принято приводить к валу двигателя.
Тормозной момент – момент, развиваемый асинхронной машиной, в режиме торможения. В литературе встречается термин синоним: тормозящий момент. В рамках теории асинхронных электродвигателей рассматривают 3 режима торможения: генераторное, динамическое и торможение противовключением.
Критический момент асинхронного двигателя – наибольшее значение момента развиваемое электродвигателем. Этого значения момент достигает при критическом скольжении. Если момент нагрузки на валу двигателя будет больше критического момента, то двигатель остановится.
Номинальный момент асинхронного двигателя – момент, возникающий на валу двигателя при номинальной мощности и номинальных оборотах. Под номинальными данными понимают данные, которые определяются при работе двигателя в режиме, для которого он был спроектирован и изготовлен.
Пусковой момент на валу асинхронника – вращающий момент, который развивает на валу электрический асинхронный двигателя при следующих условиях: скорость вращения равна нулю (ротор неподвижен), ток имеет установившееся значение, к обмоткам электродвигателя подведено номинальное по частоте и напряжению питание, соединение обмоток соответствует номинальному режиму работы электродвигателя.
Электромагнитный момент – момент, возникающий на валу электродвигателя при протекании по его обмоткам электрического тока. В литературе встречаются синонимы этого термина: вращающий момент двигателя или крутящий момент электродвигателя. Так же часто попадаются вариации с более развернутой формулировкой: электромагнитный вращающий момент или электромагнитный крутящий момент.
В литературе встречаются синонимы этого термина: вращающий момент двигателя или крутящий момент электродвигателя. Так же часто попадаются вариации с более развернутой формулировкой: электромагнитный вращающий момент или электромагнитный крутящий момент.
В рамках современной теории асинхронных электрических машин применяют ряд терминов связанных с понятием момента. Часть этих терминов относится к моменту создаваемому на валу (на роторе) электродвигателя. Другая группа терминов определяет моменты создаваемые механической нагрузкой подключенной к валу электрического двигателя.
Эти термины определяют как сам момент развиваемый двигателем, так и различный состояния момента на выходном валу двигателя. Под состоянием подразумевается значение момента в кретических точках. Например номинальный момент или пусковой момент.
Источник
РАЗДЕЛ 4. РАСЧЕТ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ
Трехфазный асинхронный двигатель с короткозамкнутым ротором, номинальная мощность которого P2н, включен в сеть на номинальное напряжение Uн частотой f=50 Гц. Определить номинальный Iн и пусковой Iп токи; номинальный Mн, пусковой Mп и максимальный Mкр моменты; полные потери мощности в двигателе при номинальной нагрузке ∆Pн. Как изменится пусковой момент двигателя при снижении напряжения на его зажимах на 15% и возможен ли пуск двигателя при этих условиях с номинальной нагрузкой? Построить механическую характеристику двигателя.
Определить номинальный Iн и пусковой Iп токи; номинальный Mн, пусковой Mп и максимальный Mкр моменты; полные потери мощности в двигателе при номинальной нагрузке ∆Pн. Как изменится пусковой момент двигателя при снижении напряжения на его зажимах на 15% и возможен ли пуск двигателя при этих условиях с номинальной нагрузкой? Построить механическую характеристику двигателя.
Данные для расчета асинхронного двигателя приведены в таблице 4.
Таблица 4 – Данные для расчета асинхронного двигателя.
| Номинальное напряжение (Uн) | 220 В |
| Номинальная мощность (P2н) | 75 кВт |
| Номинальное скольжение (Sн) | 3,0% |
| Номинальный коэффициент полезного действия (ηн) | 0,915 |
| Номинальный коэффициент мощности (cosφн) | 0,92 |
| Число пар полюсов (p) | |
| Кратность максимального момента | 2,2 |
| Кратность пускового момента | |
| Кратность пускового тока | 7,0 |
Находим потребляемую из сети мощность:
Вт. (4.1)
(4.1)
Определяем номинальный и пусковой токи:
А; (4.2)
А. (4.3)
Находим синхронную частоту вращения магнитного поля:
об/мин. (4.4)
Определяем номинальную частоту вращения ротора:
об/мин. (4.5)
Находим номинальный момент:
Н∙м. (4.6)
Определяем максимальный (критический) и пусковой моменты:
Н∙м. (4.7)
Н∙м. (4.8)
Находим полные потери при номинальной нагрузке:
Вт. (4.9)
Определяем изменение пускового момента при снижении напряжения на 15%:
Н∙м, (4.10)
и возможен ли пуск двигателя при этих условиях с номинальной нагрузкой?
А; (4. 11)
11)
А > А. (4.12)
Номинальный ток меньше в 5,95 раз – двигатель запустится.
Рассчитаем и построим механические характеристики двигателя M=f(S) и n2=f(M).
Задаваясь скольжением S от 0 до 1, рассчитаем вращающий момент и частоту вращения двигателя в соответствии с уравнениями:
, (4.13)
, (4.14)
где Sкр – скольжение, при котором двигатель развивает максимальный момент.
Критическое скольжение находим по формуле:
(4.15)
; (4.16)
. (4.17)
Данные для построения механических характеристик асинхронного двигателя приведены в таблице 5.
Таблица 5 – Расчетные данные для построения механических характеристик.
| S | n2, об/мин | М, Н∙м |
| 0,030 0,058 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0 | 441,8 541,4 469,9 289,6 201,7 153,7 123,9 103,7 89,1 78,1 69,4 62,5 |
По данным таблицы 5 строим механические характеристики.
Заключение
Оценка качества принятого в дипломном проекте технического решения должна производиться на основе анализа ее технико-экономических показателей, в число которых входят технологические и экономические показатели.
Список использованной литературы
Источник
Расчет пусковых и регулировочных характеристик асинхронных двигателей
ПРАКТИЧЕСКАЯ РАБОТА №9
«Расчет пусковых и регулировочных характеристик асинхронных двигателей»
ЦЕЛЬ РАБОТЫ: рассчитать сопротивление резисторов, подключенных к асинхронному двигателю, потребляемую им мощность и ток при номинальной нагрузке, вращающие моменты двигателя .
КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ:
Пусковые свойства двигателей с фазным ротором. Пуск асинхронного двигателя сопровождается переходным процессом, обусловленным переходом ротора и механически связанных с ним частей исполнительного механизма из состояния покоя в состояние равномерного вращения, когда вращающий момент двигателя уравновешивается суммой противодействующих моментов, действующих на ротор двигателя.
Пусковые свойства двигателя определяются в первую очередь значением пускового тока I п или его кратностью I п/ I ном и значением пускового момента Мп или его кратностью Мп/Мном. Двигатель, обладающий хорошими пусковыми свойствами, развивает значительный пусковой момент при сравнительно небольшом пусковом токе. Однако получение такого сочетания пусковых параметров в асинхронном двигателе сопряжено с определенными трудностями, а иногда оказывается невозможным.
Улучшить пусковые свойства двигателя можно увеличением активного сопротивления цепи ротора r2‘, так как в этом случае уменьшение пускового тока сопровождается увеличением пускового момента. В то же время напряжение U 1 по-разному влияет на пусковые параметры двигателя: с уменьшением U 1 пусковой ток уменьшается, что благоприятно влияет на пусковые свойства двигателя, но одновременно уменьшается пусковой момент. Целесообразность применения того или иного способа улучшения пусковых свойств двигателя определяется конкретными условиями эксплуатации двигателя и требованиями, которые предъявляются к его пусковым свойствам.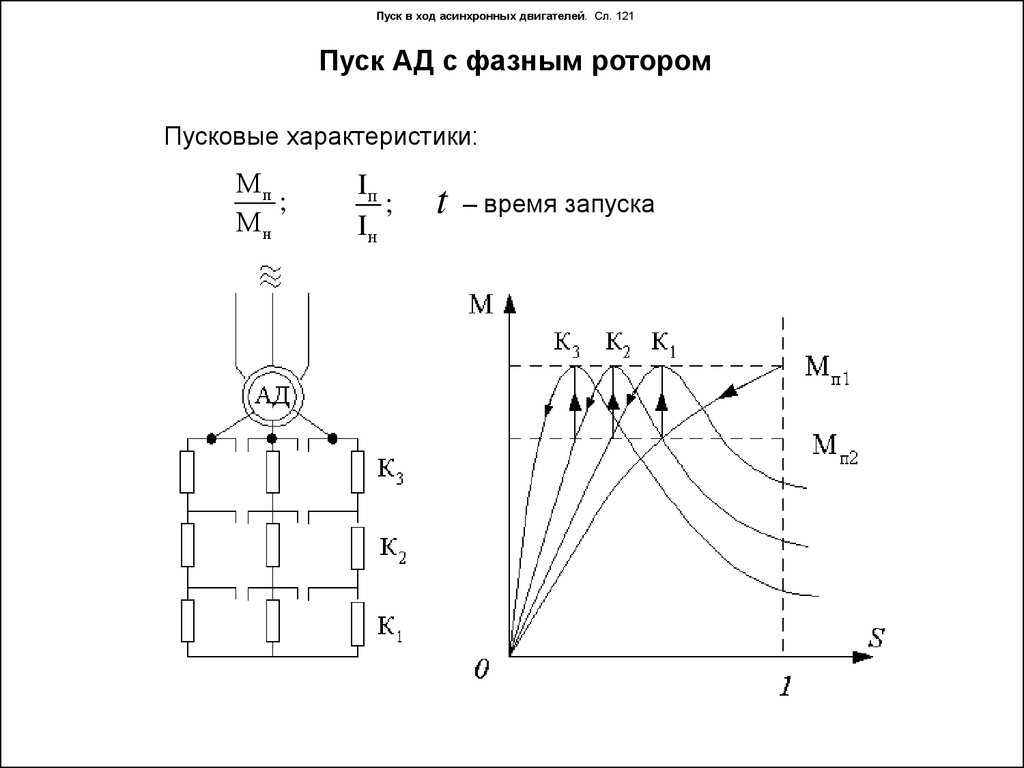
При выборе сопротивления пускового реостата rдоб исходят из условий пуска двигателя: если двигатель включают при значительном нагрузочном моменте на валу, сопротивление пускового реостата rдо6 выбирают таким, чтобы обеспечить наибольший пусковой момент; если же двигатель включают при небольшом нагрузочном моменте на валу, когда пусковой момент не имеет решающего значения для пуска, оказывается целесообразным сопротивление ПР rдоб выбирать несколько больше значения, соответствующего наибольшему пусковому моменту, т. е. чтобы R / 2 > x1 + х’2. В этом случае пусковой момент оказывается несколько меньшим наибольшего значения М п.mах, но зато пусковой ток значительно уменьшается.
На рис. 9.1, а показана схема включения ПР в цепь фазного ротора. В процессе пуска двигателя ступени ПР переключают таким образом, чтобы ток ротора оставался приблизительно неизменным, а среднее значение пускового момента было близко к наибольшему.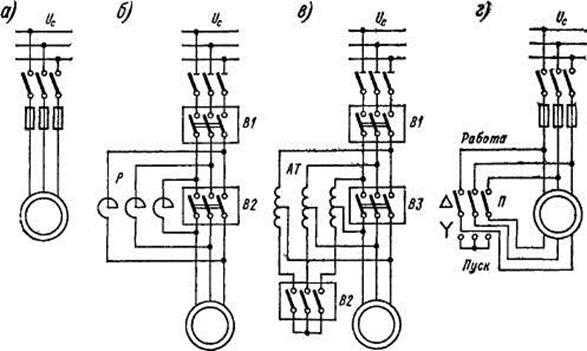
Рис. 9.1. Схема включения пускового реостата.
Пусковые реостаты состоят из кожуха, рычага с переключающим устройством и сопротивлений, выполненных из металлической проволоки или ленты, намотанной в виде спирали, или же из чугунного литья. Пусковые реостаты рассчитаны на кратковременное протекание тока, а поэтому рычаг пускового реостата нельзя долго задерживать на промежуточных ступенях, так как сопротивления реостата могут перегореть. По окончании процесса пуска, когда рычаг реостата находится на последней ступени, обмотка ротора замкнута накоротко.
В асинхронных двигателях с фазным ротором обеспечивается наиболее благоприятное соотношение между пусковым моментом и пусковым током: большой пусковой момент при небольшом пусковом токе (в 2—3 раза больше номинального). Недостатками пусковых свойств двигателей с фазным ротором являются некоторая сложность, продолжительность и неэкономичность пусковой операции. Последнее вызывается необходимостью применения в схеме двигателя пускового реостата и непроизводительным расходом электроэнергии при его нагреве.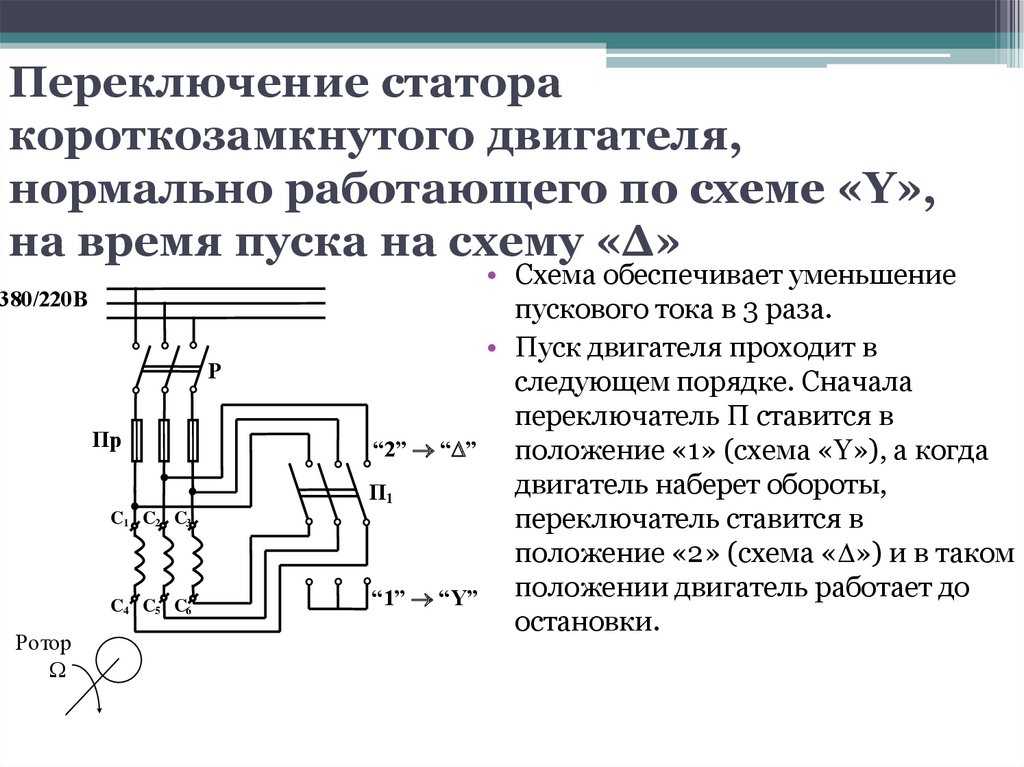
Пуск двигателей с короткозамкнутым ротором при повышенном напряжении. Этот способ пуска, отличаясь простотой, имеет существенный недостаток: в момент подключения двигателя к сети в обмотке статора возникает большой пусковой ток, в 5—7 раз превышающий номинальный ток двигателя. При небольшой инерционности исполнительного механизма частота вращения двигателя быстро достигает установившегося значения и пусковой ток также быстро спадает, не вызывая перегрева обмотки статора. Но такой значительный бросок тока в питающей сети может вызвать в ней заметное падение напряжения. Однако этот способ пуска благодаря своей простоте получил наибольшее применение для двигателей мощностью до 38—50 кВт и более (при достаточном сечении жил токоподводящего кабеля). При необходимости уменьшения пускового тока двигателя применяют какой-либо из способов пуска короткозамкнутых двигателей при пониженном напряжении.
Пуск при пониженном напряжении. Пусковой ток двигателя пропорционален подведенному напряжению U 1, уменьшение которого вызывает соответствующее уменьшение пускового тока. Существует несколько способов понижения подводимого к двигателю напряжения. Рассмотрим некоторые из них.
Существует несколько способов понижения подводимого к двигателю напряжения. Рассмотрим некоторые из них.
Для асинхронных двигателей, работающих при соединении обмоток статора треугольником, можно применить пуск переключением обмотки статора со звезды на треугольник. В момент подключения двигателя к сети переключатель ставят в положение «звезда», при котором обмотка статора оказывается соединенной в звезду. При этом фазное напряжение на статоре понижается в раз. Во столько же раз уменьшается и ток в фазных обмотках двигателя. Кроме того, при соединении обмоток звездой линейный ток равен фазному, в то время как при соединении этих же обмоток треугольником линейный ток больше фазного в раз. Следовательно, переключив обмотки статора звездой, мы добиваемся уменьшения линейного тока в () 2 = 3 раза.
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, переключатель быстро переводят в положение «треугольник» и фазные обмотки двигателя оказываются под номинальным напряжением. Возникший при этом бросок тока до значения I / пΔ является незначительным.
Возникший при этом бросок тока до значения I / пΔ является незначительным.
Описанный способ понижения напряжения при пуске применим лишь для двигателей, работающих при соединении обмотки статора треугольником. Более универсальным является способ с понижением подводимого к двигателю напряжения посредством реакторов (реактивных катушек — дросселей).
Недостаток этого способа пуска состоит в том, что уменьшение напряжения в U / 1/ U 1ном раз сопровождается уменьшением пускового момента Мп в ( U / 1/ U 1ном) 2 раз.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ:
Источник
Пусковые режимы асинхронных электродвигателей
Главная страница » Пусковые режимы асинхронных электродвигателей
Момент начала питания электродвигателя напряжением сети сопровождается высоким пусковым током. Поэтому, если участок линии электропередачи относительно слаб, фиксируется снижение напряжения, что оказывает влияние на работу рецептора. Падение напряжения может достигать значительных величин, что также сказывается на функциональности систем освещения. Исключить подобные явления призваны отраслевые правила, которыми запрещается пуск электродвигателей в режиме непосредственного старта, если оборудование выходит за пределы заданной мощности. Следует применять такие пусковые режимы электродвигателей, при которых питающая сеть и периферийное оборудование не испытывают дестабилизации в работе.
Падение напряжения может достигать значительных величин, что также сказывается на функциональности систем освещения. Исключить подобные явления призваны отраслевые правила, которыми запрещается пуск электродвигателей в режиме непосредственного старта, если оборудование выходит за пределы заданной мощности. Следует применять такие пусковые режимы электродвигателей, при которых питающая сеть и периферийное оборудование не испытывают дестабилизации в работе.
Пусковые режимы электрических моторов
Существуют и применяются на практике разные пусковые режимы асинхронных электродвигателей. Каждый имеет свои плюсы и минусы в зависимости от технических характеристик моторов и нагрузки.
Выбор конкретного режима пуска определяется электрическими, механическими, экономическими факторами. Вид управляемой нагрузки, также является важным фактором выбора режима запуска. Рассмотрим наиболее часто практикуемые варианты пусков.
Пусковые режимы свободно вращающегося мотора
Этот режим пуска асинхронного электродвигателя видится самым простым из всех существующих схем. Здесь статор мотора напрямую подключается к источнику питания. Электродвигатель стартует в соответствии с определённой для него характеристикой.
Здесь статор мотора напрямую подключается к источнику питания. Электродвигатель стартует в соответствии с определённой для него характеристикой.
Схема на прямые пусковые режимы электродвигателя: 1 — колодка предохранителей; 2 — контактор; 3 — биметаллическое реле; 4 — мотор; 5, 6 — кривые состояния в момент старта
Когда имеет место момент включения, электрический мотор, в данном случае, работает подобно вторичной обмотке трансформатора. Пусковые режимы здесь характеризуются короткозамкнутым ротором, имеющим крайне малое сопротивление.
На роторе формируется высокий индуцированный ток, превышающий в 5-8 раз номинальный параметр, за счёт чего возрастает пиковый ток в сети питания. Среднее значение пускового момента при этом составляет 0,5-1,5 от номинала.
Несмотря на явные преимущества (простая схема, высокий пусковой момент, быстрый старт, экономия), режим прямого пуска асинхронных моторов видится разумным лишь в следующих обстоятельствах:
Пусковые режимы переключением «звезда-треугольник»
Вариант с переключением схемы обмоток применим только на электродвигателях, где начальные и конечные проводники всех трёх обмоток статора выведены на клеммы БРНО.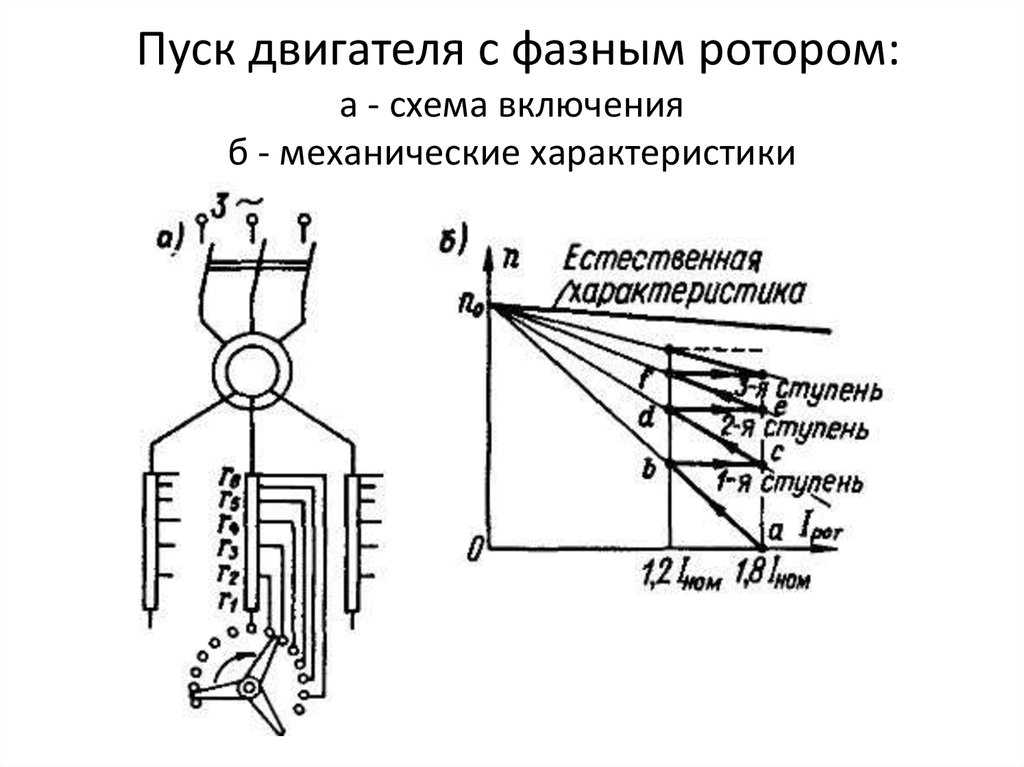 Кроме того, обмотка мотора должна иметь исполнение, когда соединение треугольником соответствует сетевому напряжению.
Кроме того, обмотка мотора должна иметь исполнение, когда соединение треугольником соответствует сетевому напряжению.
Схема старта «звезда-треугольник»: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — контактор 3; 5 — биметаллическое реле защиты; 6 — мотор
Например, для 3-фазной линейной сети 380В подойдёт электродвигатель с параметрами обмотки 380В – «треугольник» и 660В — «звезда». Принцип на пусковые режимы асинхронного электродвигателя для этого варианта — старт мотора звездообразным подключением обмотки к сетевому трёхфазному напряжению. Здесь теоретически номинальное напряжение «звезды» электродвигателя делится на корень квадратный из 3 (380В = 660В / √3). Пик пускового тока также делится на 3 и составит:
ПТ = 1,5 — 2,6 НТ (номинальный ток)
Электродвигатель с обмоткой под напряжения 380В / 660В, под номинальное напряжение 660В, потребляет меньше тока в 3,3 раза, чем на соединении «треугольник» при напряжении 380В. В режиме соединения «звездой» при напряжении 380В, ток вновь делится на √3, учитывая наличие 3 фаз. Поскольку пусковой момент (ПМ) пропорционален квадратуре значения питающего напряжения, значение ПМ также делится на 3 и составит:
В режиме соединения «звездой» при напряжении 380В, ток вновь делится на √3, учитывая наличие 3 фаз. Поскольку пусковой момент (ПМ) пропорционален квадратуре значения питающего напряжения, значение ПМ также делится на 3 и составит:
ПМ = 0.2 — 0.5 НПМ (номинальный пусковой момент)
Скорость электродвигателя стабилизируется при балансировке и резистивных крутящих моментах, как правило, на уровне 75-85% от номинальной скорости. Затем обмотки соединяются «треугольником», после чего электродвигатель восстанавливает рабочие характеристики.
Переход от соединения «звезда» на соединение «треугольник», как правило, контролируется таймером. Контактор «треугольника» закрывается спустя 30-50 миллисекунд после открытия контактора «звезды». Этой последовательностью предотвращается короткое замыкание между фазами.
Течение тока через обмотки нарушается, когда контактор «звезды» открывается и восстанавливается вновь, когда закрывается контактор «треугольника». В этот момент (сдвиг на «треугольник») формируется короткий, но сильный переходный пик тока по причине противоэлектродвижущей силы электродвигателя.
Каким моторам нужен пуск «звезда – треугольник»?
Пусковые режимы «звезда – треугольник» подходят для машин с низким резистивным крутящим моментом или когда старт выполняется без подключенной нагрузки. Для ограничения переходных явлений выше определенного уровня мощности, могут потребоваться дополнительные меры. Например, 1-2-секундная задержка на сдвиг от «звезды» к «треугольнику».
Применение такой задержки по времени способствует ослаблению противоэлектродвижущей силы. Следовательно, уменьшается пиковая составляющая переходного тока. Однако задержка рекомендуется только в том случае, когда машина имеет достаточную инерцию. Иначе время задержки значительного снижает скорость вращения. Также применим другой вариант – трёхступенчатый, где выполняется последовательность:
Разрыв по-прежнему имеет место, но резистор, включенный последовательно с обмотками подключенными «треугольником» в течение примерно трех секунд понижает переходный ток. Так предотвращается нарушение течения тока и образование переходных негативных явлений.
Пусковые режимы с питанием части обмотки
Подобный вариант режима пуска асинхронного электродвигателя — редкость для России и Европы. Эта схема на пусковые режимы электродвигателей распространена в США (для моторов напряжением 230/460В).
Схема на пусковые режимы путём питания части обмотки статора: 1 — контактор 1; 2 — контактор 2; 3 — мотор; 4 — одна половина обмотки; 5 — вторая половина обмотки
Такие двигатели имеют обмотку статора, разделенную на две параллельные обмотки, с выводом шести или двенадцати концевых проводников. Этот вариант, по сути, эквивалентен двум «половинным моторам» равной мощности.
В режиме запуска один «половинный двигатель» подключается непосредственно к полному напряжению сети. Пусковой ток и крутящий момент делятся примерно на два. Крутящий момент, однако, существенно больше, чем для электродвигателя с короткозамкнутым ротором равной мощности в режиме пуска «звезда-треугольник».
Конечным этапом режима пуска становится подключение к сети второй обмотки. В этот момент, текущий пиковый ток отмечается низким уровнем и протекает кратковременно, потому что электродвигатель не отключается от сети и уже частично раскручен.
В этот момент, текущий пиковый ток отмечается низким уровнем и протекает кратковременно, потому что электродвигатель не отключается от сети и уже частично раскручен.
Резистивно-статорные пусковые режимы моторов
Применение резистивно-статорного режима пуска электродвигателя отмечается пониженным напряжением. Причина понижения — резисторы, включенные последовательно с обмотками статора.
Когда скорость вращения ротора стабилизируется, резисторы отключаются, а статор электродвигателя подключается непосредственно к сети. Как правило, схема выстроена с участием таймера.
Этот режим пуска асинхронных электродвигателей не изменяет соединения статорных обмоток. Поэтому не требуется, чтобы на клеммы колодки БРНО выводились все концевые проводники обмотки.
Резистивный вариант старта мотора: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — тепловая защита; 5 — запускаемый мотор
Значение сопротивления рассчитывается в соответствии с максимальным пиковым током при пуске. Или же с учётом минимального тока, необходимого для крутящего момента привода машины. Значения пускового тока и крутящего момента следующие:
Или же с учётом минимального тока, необходимого для крутящего момента привода машины. Значения пускового тока и крутящего момента следующие:
ПТ = 4.5 НТ
ПМ = 0,75 НПМ
На этапе ускорения с резисторами, приложенное на клеммах электродвигателя напряжение не является полным, а равно разнице, полученной от величины напряжения сети, минус падение напряжения на сопротивлении.
Падение напряжения пропорционально току потребления электродвигателя. Поскольку ток снижается по мере ускорения вращения ротора мотора, то же самое происходит и при падении напряжения на сопротивлении.
Поэтому напряжение, приложенное на клеммы асинхронного электродвигателя, находится на самом низком уровне при запуске, а затем постепенно увеличивается.
Поскольку крутящий момент пропорционален квадрату напряжения на клеммах мотора, этот момент увеличивается быстрее, чем при пуске в режиме «звезда-треугольник», где напряжение остается постоянным на всём протяжении времени, пока действует подключение «звездой».
Таким образом, резистивно-статорный режим пуска подходит для машин с резистивным крутящим моментом, который увеличивается с набором скорости. Такой пуск оптимален для оборудования, подобного вентиляторам и центробежным насосам.
Однако есть недостаток — довольно высокий пиковый ток на запуске. Снижение тока возможно увеличением сопротивления. Но увеличение значения сопротивления грозит падением напряжения на клеммах электродвигателя и, как следствие, приводит к резкому снижению пускового момента.
Пусковые режимы автотрансформаторного хода
Режим автотрансформаторного пуска асинхронного электродвигателя характерен способом питания. На мотор подводится пониженное напряжение, благодаря автотрансформатору.
Автотрансформаторная схема: 1 — контактор 1; 2 — тепловая защита; 3 — контактор 2; 4 — контактор 3; 5 — автотрансформатор; 6 — контактор 4; 7 — мотор
По завершению процесса старта автотрансформатор отключается. Пуск выполняется в три этапа:
Пусковой процесс проходит без фактора разрыва прохождения тока в обмотках электродвигателя. Поэтому переходные явления по причине разрывов отсутствуют.
Поэтому переходные явления по причине разрывов отсутствуют.
Между тем если не соблюдать определённые меры предосторожности, подобные явления переходного процесса могут появляться при подключении полного напряжения.
Этот дефект обусловлен высоким значением индуктивности, включенной последовательно с двигателем, по сравнению с режимом работы мотора на всём протяжении времени подключения «звездой».
Отмечается резкое падение напряжения, чем вызывается высокий рост переходного тока при подключении полного напряжения. Чтобы преодолеть этот недостаток, магнитная цепь автотрансформатора выполняется с воздушным зазором.
Наличие такого зазора способствует снижению значения индуктивности. Это значение рассчитывается для предотвращения изменения напряжения на клеммах электродвигателя, когда осуществляется переход на второй шаг процесса пуска.
Воздушный зазор вызывает увеличение тока намагничивания катушки автотрансформатора. Ток намагничивания увеличивает пусковой ток электросети при включении автотрансформатора.
Автотрансформаторный режим пуска обычно используется при эксплуатации двигателей мощностью более 150 кВт. Подобные схемы считаются экономически невыгодными по причине высокой стоимости автотрансформатора.
Режим пуска асинхронных двигателей с фазным ротором
Нельзя запускать асинхронный электродвигатель с фазным ротором сразу после короткого замыкания роторных обмоток. Этот метод приводит к появлению предельных пиковых токов.
Старт для мотора с фазным ротором: 1 — предохранительный блок; 2 — защита; 3, 7, 8, 9 — контакторы; 4, 5, 6 — ограничительные резисторы: 10 — мотор с фазным ротором
Необходимо использовать резисторы в цепях питания ротора. Замыкать роторные обмотки следует постепенно, по мере набора статором полного сетевого напряжения.
Сопротивление на каждой фазе необходимо рассчитывать с учётом точного определения кривой крутящего момента. В результате расчётное сопротивление полностью включается при запуске и замыкается накоротко только при достижении ротором полной скорости вращения.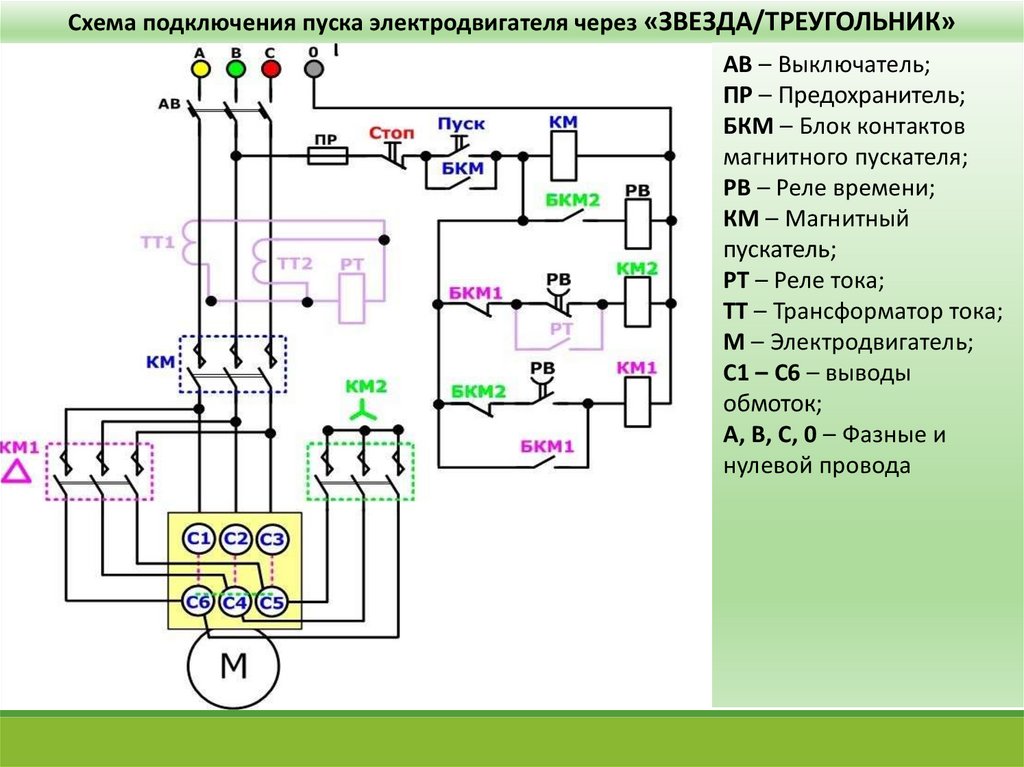
Режим пуска электродвигателя с фазным ротором является лучшим выбором для всех случаев, когда пиковые токи машин должны быть низкими, а запуск осуществляется при полной нагрузке.
Такой пуск обладает чрезвычайно плавным ходом, так как достаточно легко регулировать количество и форму кривых, представляющих собой последовательные шаги по механическим и электрическим требованиям (резистивный крутящий момент, значение ускорения, максимальный пик тока и т. д.).
Режим плавного пуска: «запуск с замедлением»
Один из эффективных стартовых режимов, подходящих для плавного пуска и останова электродвигателя. Применяется с целью ограничение тока, регулировки крутящего момента. Контроль по ограничению тока устанавливается на максимум (кратность 3-4 от номинала) при пуске, чем снижается характеристика крутящего момента.
Этот способ удачно подходит для центробежных насосов, вентиляторов и т.п. Регулирование с помощью настройки крутящего момента оптимизирует крутящие моменты в процессе пуска и снижает пусковой ток.
Схемный вариант разводки для обеспечения старта при условии каскадного объединения электрических моторов
Такой режим оптимально подходит для машин с постоянным крутящим моментом. Этим режимом поддерживается много разных вариаций:
Пусковые режимы с преобразователем частоты
Современная эффективная пусковая система, применимая для использования, когда необходимо контролировать и настраивать в широком диапазоне скорость вращения вала мотора. Поддерживаются условия:
Этот режим пуска асинхронных электродвигателей допустимо использовать на всех типах электрических машин. Однако подобные решения в основном используются для регулировки скорости вала электродвигателя, начиная с пусков второстепенного назначения.
Техника плавного старта мотора на видео
Как плавно запускать асинхронный мотор? Методика и возможные пусковые режимы показаны на видеоролике. Смотрите ниже познавательный видео-материал, который должен стать полезным уроком потенциального электрика.
Источник
Видео
Мощность асинхронного двигателя и пусковой ток
Электрические машины, часть 4. Характеристики асинхронных двигателей
Пуск электродвигателя, без пускового тока, звезда, треугольник, схема запуска, видео, энергомаг
Пуск асинхронного двигателя. Прямой пуск, звезда/треугольник, УПП, ПЧ. В чем разница?
Как определить мощность, частоту вращения, двигателя без бирки или шильдика самому и просто
Способы пуска трехфазных асинхронных двигателей
Как определить мощность электродвигателя по потребляемому току. Расчет мощности двигателя.
Рассчитать ёмкость конденсатора для трёхфазного двигателя в однофазной сети. КАК Я,ЭТО ДЕЛАЮ!!!
Плавный пуск трёхфазного эл.двигателя ограничение пусковых токов.
Этому не учат, а стоило бы. Чем отличается звезда от треугольника? #звезда #треугольник #двигатель
Методы снижения пускового тока асинхронного двигателя
Реакторный пуск
В этом случае двигатель пускается при пониженном напряжении сети с помощью реактора или трансформатора.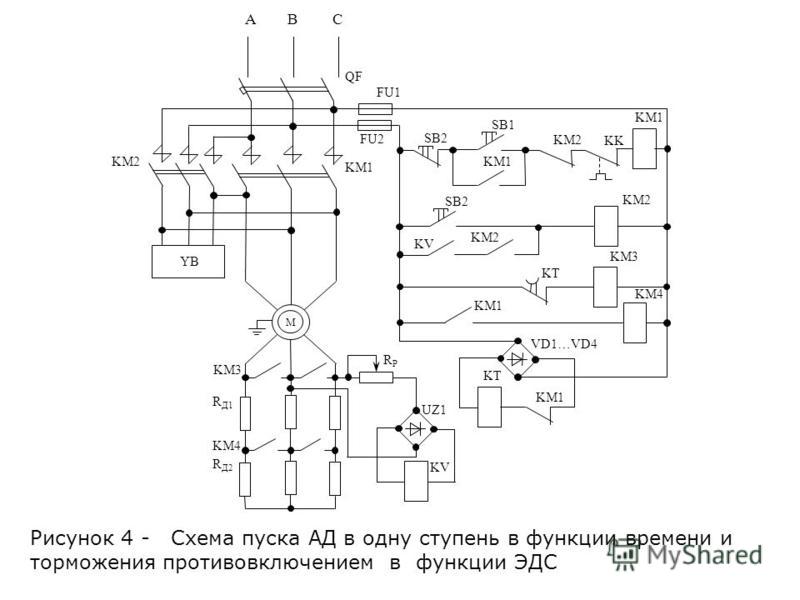 Реакторный пуск рекомендуется в первую очередь и только при невозможности его использования допу-скается автотрансформаторный пуск.
Реакторный пуск рекомендуется в первую очередь и только при невозможности его использования допу-скается автотрансформаторный пуск.
Реакторный пуск синхронных компенсаторов ( рис. 5 — 1 ж), принятый сейчас как основной, применен для мощных машин.
Реакторный, или автотрансформаторный, пуск осуществляется подачей на обмотки электродвигателей напряжения, сниженного с помощью автотрансформатора или чаще всего реактора, которые отключаются при разгоне агрегата до подсин-хронной частоты вращения. При реакторных пусках снижаются момент, развиваемый двигателем при пуске, толчки и вибрации машины, потребляемая мощность, нагрев обмоток и падение напряжения и увеличивается время пуска.
Конденсаторный или реакторный пуск.
Пуск электродвигателей серии ВДС 325 — прямой асинхронный от сети, имеющей полное напряжение. Электродвигатели ВДС 325 имеют реакторный пуск от сети с пониженным напряжением.
Трехфазный асинхронный двигатель с кратностью начального пускового тока kj 5 6 и кратностью начального пускового момента kn — 1 3 пускается в ход при нагрузке Мв 0 5 Мн. Применим ли в этом случае реакторный пуск.
Дают возможность регулировании напряжения. При до-статичнои мощности подстанции возможен реакторный пуск или непосредственный пуск от шип.
Схема электрических соединений насосной станции должна обеспечивать прямой пуск асинхронных и синхронных электродвигателей от полного напряжения сети. Для мощных электродвигателей в соответствии с указаниями заводов-изготовителей может применяться реакторный пуск. Использование крупных синхронных электродвигателей для работы в компенсаторном режиме в перерывах водоподачи должно быть обосновано технико-экономическими расчетами.
Вспомогательная схема токовых цепей защит электродвигателей с реакторным пуском от многофазных КЗ. а — при применении токовой отсечки. б — при применении дифференциальной защиты. М — электродвигатель. L — пусковой реактор. Ql, Q2 — выключатели. ТА1 — ТАЗ — трансформаторы тока. АК1, АК2 — комплекты токовых отсечек. АК — комплект дифференциальной защиты.| Принципиальная схема дифференциальной защиты электродвигателя М с реле. а — при применении токовой отсечки. б — при применении дифференциальной защиты. М — электродвигатель. L — пусковой реактор. Ql, Q2 — выключатели. ТА1 — ТАЗ — трансформаторы тока. АК1, АК2 — комплекты токовых отсечек. АК — комплект дифференциальной защиты.| Принципиальная схема дифференциальной защиты электродвигателя М с реле. |
Если применена дифференциальная защита, то в плече защиты со стороны питания с той же целью устанавливается двухфазная двухрелейная отсечка без выдержки времени, которая для повышения чувствительности выводится из действия на время пуска электродвигателя. На рис. 2.192 показаны блок-схемы токовых цепей защит электродвигателей с реакторным пуском.
Пуск синхронных компенсаторов осуществляется различными способами: асинхронный — непосредственно от сети, от разгонного двигателя, через автотрансформатор и через реактор; асинхронный пуск применяется только при малых мощностях компенсаторов.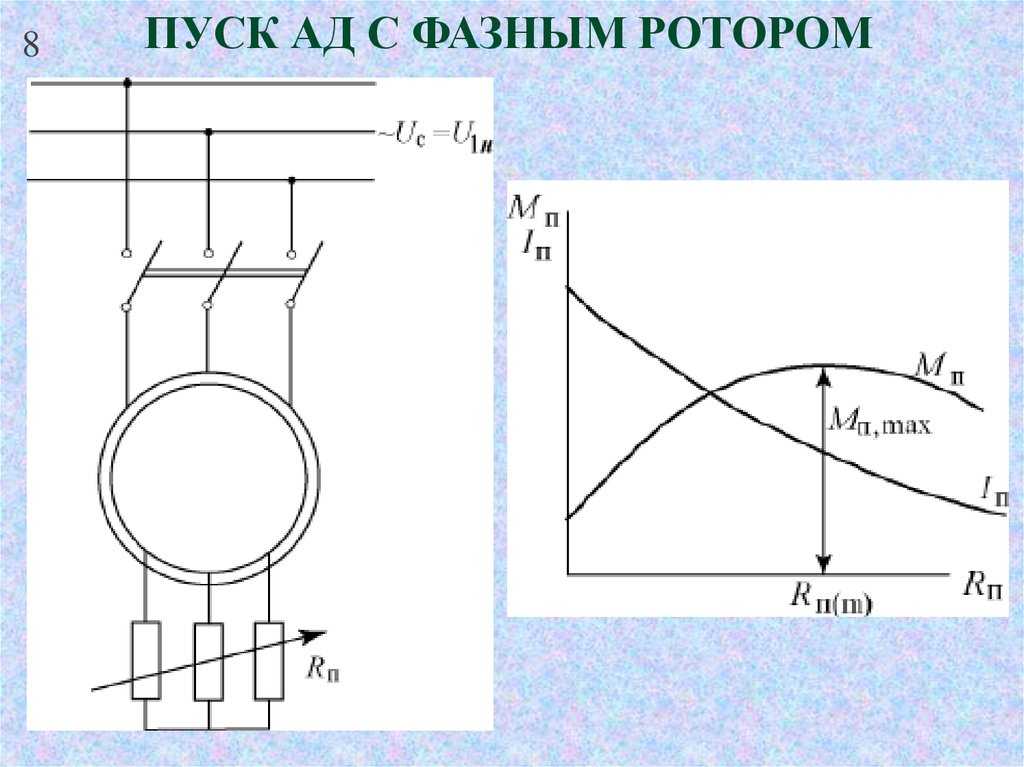 Наиболее простым способом пуска, чаще всего применяемым на практике, является реакторный пуск компенсатора. Синхронные компенсаторы типа КС до 30 000 ква включительно имеют воздушное охлаждение, а компенсатор типа КСВ-37500 ква — водородное охлаждение.
Наиболее простым способом пуска, чаще всего применяемым на практике, является реакторный пуск компенсатора. Синхронные компенсаторы типа КС до 30 000 ква включительно имеют воздушное охлаждение, а компенсатор типа КСВ-37500 ква — водородное охлаждение.
| Прямая ( а и обратная ( б схемы включения пусковых автотрансформаторов. |
Однако это преимущество автотрансформаторного пуска достигается ценой значительного усложнения и удорожания пусковой аппаратуры. Поэтому автотрансформаторный пуск применяется реже реакторного, при более тяжелых условиях, когда реакторный пуск не обеспечивает необходимого пускового момента.
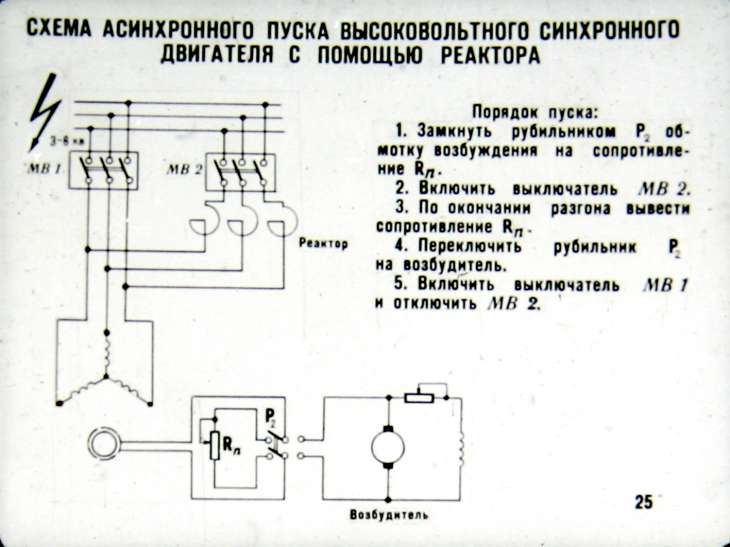
| Схема пуска синхронного двигателя с реактором. |
Все аппараты управления синхронным двигателем размещаются на станциях управления. На рис. 39 показан общий вид фасада станции управления ПН7028 для синхронных двигателей с реакторным пуском. Кроме аппаратов, перечисленных при описании схемы пуска синхронного двигателя СТМ-4000-2, на станции управления показаны приборы и аппараты, применяемые в управлении двигателей.
Кроме аппаратов, перечисленных при описании схемы пуска синхронного двигателя СТМ-4000-2, на станции управления показаны приборы и аппараты, применяемые в управлении двигателей.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
N=60f/p
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
Применение сопротивления при пуске
Метод применим для асинхронных двигателей, подключаемых к однофазной сети, и имеющих первичную дополнительную обмотку с короткозамкнутым ротором. Так называют мотор с расщепленной фазой, электроцепь которого имеет высокое активное сопротивление.
Чтобы пустить в ход двигатель, питаемый от однофазной сети, необходим пусковой резистор, соединяемый последовательно с дополнительной намоткой. Тогда сдвиг фаз составляет 30 градусов. Этого хватает для разгона. Ниже представлена схема, согласно которой достигается омический сдвиг фаз.
Ниже представлена схема, согласно которой достигается омический сдвиг фаз.
Вместо резистора можно применить дополнительную обмотку высокого сопротивления, но низкой индуктивности. В этом случае намотка имеет мало витков, которые выполняются из провода меньшего сечения в отличие от того, что используется для рабочей намотки.
В России с конвейера выходят моторы, подключаемые к однофазной сети, оснащенные резистором для сдвига фаз. Их мощность варьируется в диапазоне 18-600 Вт. Двигатели рассчитаны для сетей с напряжением 127, 220 или 380 Вольт и переменным током с частотой 50 Гц.
Основные и дополнительные функции УПП
Современные софт-стартеры – многофункциональные электротехнические устройства. Основное их предназначение – снижение пусковых токов и смягчение динамических ударов при старте двигателя. Кроме того, УПП обеспечивают:
- Пуск с номинальным моментом. При этом при старте на электродвигатель подается максимальное напряжение, после чего включаются тиристоры.
 Разгон до номинальной частоты осуществляется плавно. Софт-стартеры такой конструкции применяют для механизмов со значительной пусковой нагрузкой.
Разгон до номинальной частоты осуществляется плавно. Софт-стартеры такой конструкции применяют для механизмов со значительной пусковой нагрузкой. - Динамическое торможение. УПП с данной функцией обеспечивают остановку привода без выбега. Их устанавливают в приводе инерционного технологического оборудования: тяговых вентиляторов, подъемниках и т.д.
- Пуск в функции тока и напряжения. УПП такой конструкции позволяют задавать предельное значение пускового тока. Устройства применяются при низкой мощности сети, а также в приводе оборудования с низким стартовым моментом.
- Защиту электродвигателя. Софт-стартеры обеспечивают остановку привода при обрыве фаз, перегрузках, превышении времени разгона, а также при возникновении других аномальных и аварийных режимов. УПП не имеют защиты от коротких замыканий и включаются через предохранители или автоматы.
- Интеграцию в САР и системы телемеханики. Софт-стартеры с процессорными блоками управления и устройствами поддержки протоколов связи с удаленным оборудованием контроля легко встраиваются в многоуровневые системы автоматизации технических процессов.
- Регулировку частоты вращения вала. УПП с такой функцией не заменяют частотные преобразователи. Такой режим допустим при непродолжительной настройке оборудования.
 Разгон до номинальной частоты осуществляется плавно. Софт-стартеры такой конструкции применяют для механизмов со значительной пусковой нагрузкой.
Разгон до номинальной частоты осуществляется плавно. Софт-стартеры такой конструкции применяют для механизмов со значительной пусковой нагрузкой.
Выбор функционала софт-стартера зависит от требований к электроприводу и осуществляется на основании технико-экономической целесообразности.
Iн = Pн/(√3Uн х сosφ), кА
где Pн – номинальная мощность двигателя, кВт, Uн – напряжение в сети, кВ (0,38 кВ). Коэффициент мощности (сosφ) – паспортные значения двигателя.
Рис. 1. Паспорт электрического двигателя.
Если не известен коэффициент мощности двигателя, то номинальный его ток с малой погрешностью определяется по отношению “два ампера на киловатт”, т.е. если номинальная мощность двигателя 10 кВт, то потребляемый им из сети ток будет приблизительно равен 20 А.
Для упомянутого на рисунке двигателя это отношение также выполняется (3,4 А ≈ 2 х 1,5). Более верные величины тока при применении данного отношения получаются при мощностях электродвигателей от 3 кВт.
При холостом ходе электродвигателя из сети потребляется маленький ток (ток холостого хода). При увеличении нагрузки увеличивается и ток. С увеличением тока повышается нагрев обмоток. Большая перегрузка приводит к перегреву обмоток двигателя, и возникает опасность выхода из строя электродвигателя.
При пуске из сети электрическим двигателем потребляется пусковой ток Iпуск, который в 3 – 8 раз выше номинального. Характеристика изменения тока представлена на графике (рис. 2, а).
Рис. 2. Характеристика изменения тока, потребляемого электродвигателем из сети (а), и влияние большого тока на колебания напряжения в сети (б)
Подлинную величину пускового тока для электродвигателя определяют зная величину кратности пускового тока – Iпуск/Iном. Кратность пускового тока – техническая характеристика двигателя, ее известна из каталогов. Пусковой ток рассчитывается согласно формуле: I пуск = Iх. х (Iпуск/Iном).
Понимание истинной величины пускового тока необходимо для подбора плавких предохранителей, проверки включения электромагнитных расцепителей во время пуска двигателя, при подборе автоматических выключателей и для высчитывания величины падения напряжения в сети при пуске.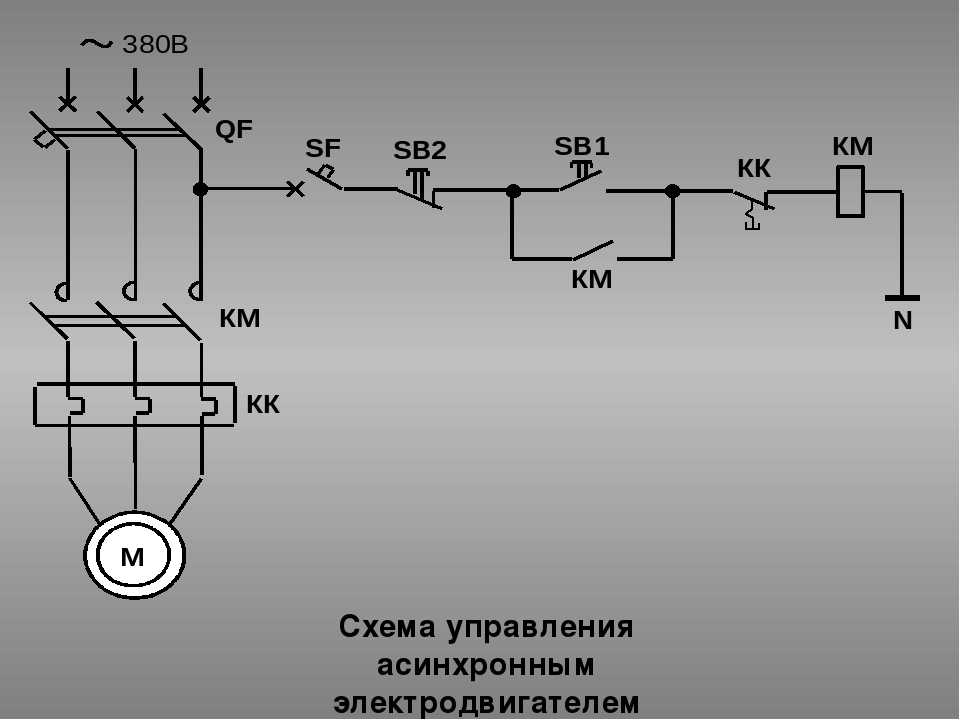
Большой пусковой ток вызывает значительное падение напряжения в сети (рис. 2, б).
Если взять электросопротивление проводов, проложенных от источника до электродвигателя, равным 0,5 Ом, номинальный ток Iн=15 А, а пусковой ток Iп равным пятикратному от номинального, потери напряжения в проводах во время пуска составят 0,5 х 75 + 0,5 х 75 = 75 В.
На клеммах электродвигателя, а также и на клеммах рядом работающих электродвигателей напряжение будет 220 – 75 = 145 В. Это понижение напряжения вызывает торможение работающих электродвигателей, что влечет за собой еще большее повышение тока в сети и выход из строя предохранителей.
В электрических лампах в моменты запуска электродвигателей уменьшается накал (лампы «мигают»). Поэтому при включении электродвигателей стремятся уменьшить пусковые токи.
Для понижения пускового тока используется схема пуска электродвигателя с переключением обмоток статора со звезды на треугольник.
Рис. 3. Схема пуска электрического электродвигателя с переключением обмоток статора со звезды на треугольник.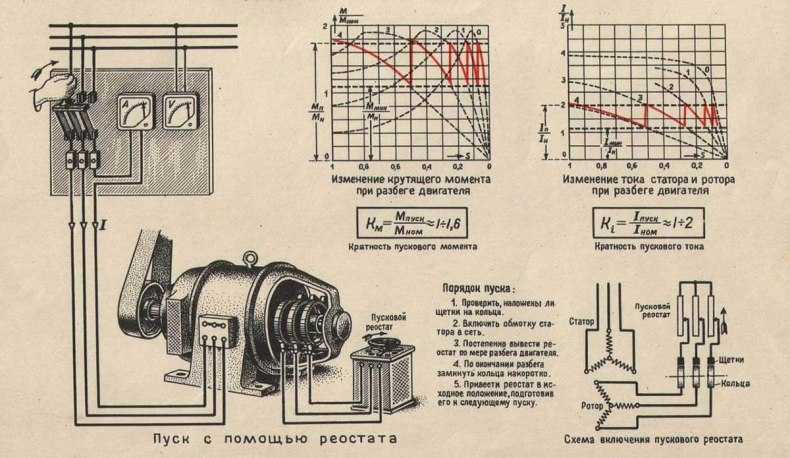
Имеет принципиальное значение то, что далеко не каждый двигатель возможно включать по этой схеме. Широко распространенные асинхронные двигатели с рабочим напряжением 220/380 В, в том числе и двигатель, показанный на рисунке 1 при включении по этой схеме выйдут из строя.
Полноценное проведение диагностического осмотра мотора
Для того, чтобы осмотреть статор и другие центральные элементы электродвигателя, используют специальные козлы, оснащенные двумя катками в верхней своей части. Последние упрощают вращение деталей.
Самостоятельный ремонт мотора следует начинать с тщательного изучения всей технической документации. Далее определяется степень износа подшипников, обнаруживаются и устраняются иные дефекты.
Технические работы ведутся с использованием набора специальных ключей, обыкновенного тестера и механизмов для подъема. Главное не забыть отключить мотор от сети. Все узлы очищаются от слоя пыли при помощи щеточек и обдуваются сжатым воздухом. В дальнейшем мелкие детали и все их крепления желательно складывать в отдельный ящик, чтобы избежать пропажи.
В дальнейшем мелкие детали и все их крепления желательно складывать в отдельный ящик, чтобы избежать пропажи.
Ротор электродвигателя разбирается с учетом следующих рекомендаций. Как только щит будет отделен от корпуса двигателя, его сдвигают вдоль вала, стараясь не повредить изоляцию обмоток. Для этих целей используют картон высокой плотности, размещая его между статором и ротором, а впоследствии укладывая на него детали.
С вала также снимаются пружины и подшипники. Демонтируется обмотка короткозамкнутого типа и сердечник. Главным требованием при выемке ротора является аккуратное движение вдоль оси.
При проверке вентиляторов обращают внимание на целостность лопастей и надежность их крепления. Делается процедура при помощи молотка. Дефектные детали заменяются
Нельзя нарушать балансировку, поэтому перед осмотром необходимо сделать заметку на роторе, чтобы при сборе каждый элемент встал на свое место
Дефектные детали заменяются. Нельзя нарушать балансировку, поэтому перед осмотром необходимо сделать заметку на роторе, чтобы при сборе каждый элемент встал на свое место.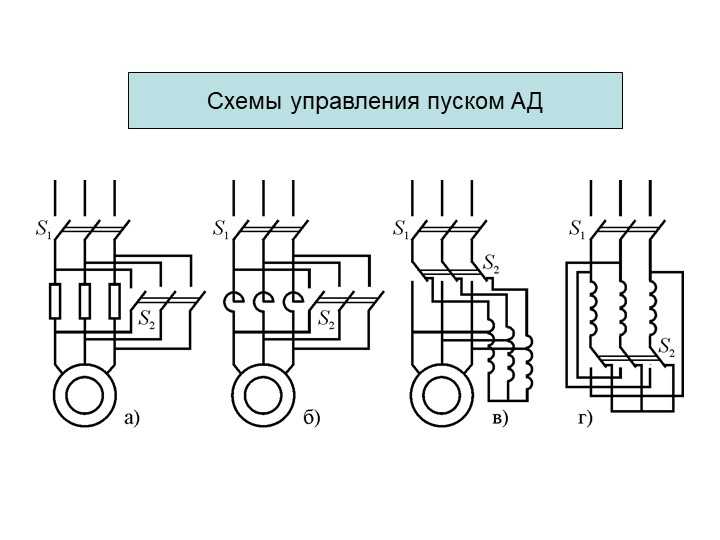
Преимущества УПП
В сравнении с другими схемами пуска асинхронных электродвигателей, УПП обеспечивает наибольшее снижение амплитуды пускового тока.
Кроме того, такие устройства обладают следующими преимуществами:
- Продление срока службы двигателя и технологического оборудования. УПП снижает нагрев обмоток, контактов, а также исключает динамические удары.
- Значительное снижение затрат на аппаратную часть электропривода. Установка софт-стартеров позволяет сэкономить на схемах защиты, устанавливать менее мощные коммутирующие устройства.
- Снижение нагрузки на электросеть. УПП снижают броски тока и предотвращают падение напряжения в электросетях. Это особенно актуально при ограниченной мощности трансформаторов и использовании автономных источников электропитания.
- Повышение безопасности производства. Плавный старт и разгон снижет травматизм при поломках оборудования, связанных с рывками при запуске, вероятность гидравлических ударов, других аварийных ситуаций.
- Уменьшение наводимых помех при старте. Софт-стартеры снижают интенсивность магнитного поля при пуске электродвигателя. УПП позволяют отказаться от фильтров для контрольных кабелей.
- Низкая стоимость. Устройства плавного пуска стоят в несколько раз дешевле преобразователей частоты той же мощности. Софт-стартеры выгодно использовать при постоянной нагрузке оборудования в условиях, где ограничение пусковых токов и стартового момента являются основными требованиями.
УПП также заменяют механические тормоза и кинематические устройства для остановки. Кроме того, софт-стартеры позволяют применять асинхронные двигатели с ротором типа “ беличья клетка” вместо дорогих электрических машин с улучшенными пусковыми характеристиками или фазным ротором.
Выбор схемы пуска осуществляется на основании анализа требований к оборудованию и характеристик электрической сети.
Асинхронные электродвигатели
Асинхронные электродвигатели переменного тока получили наибольшее распространение в промышленном производстве. Особенностью данных приводов является более высокая частота вращения магнитного поля по сравнению со скоростью вращения ротора.
Особенностью данных приводов является более высокая частота вращения магнитного поля по сравнению со скоростью вращения ротора.
В современных двигателях для изготовления ротора используется алюминий. Легкий вес этого материала позволяет уменьшить массу электродвигателя, сократить себестоимость его производства.
КПД асинхронного двигателя падает почти вдвое при эксплуатации в режиме низких нагрузок – до 30-50 процентов от номинального показателя. Еще один недостаток таких электроприводов состоит в том, что параметры пускового тока почти втрое превышают рабочие показатели. Для уменьшения пускового тока асинхронного двигателя используются частотные преобразователи или устройства плавного пуска.
Асинхронные электродвигатели удовлетворяют требованиям разных промышленных применений:
- Для лифтов и другого оборудования, требующего ступенчатого изменения скорости, выпускаются многоскоростные асинхронные приводы.
- При эксплуатации лебедок и металлообрабатывающих станков используются электродвигатели с электромагнитной тормозной системой. Это обусловлено необходимостью остановки привода и фиксации вала при перебоях напряжения или его исчезновения.
- В процессах с пульсирующей нагрузкой или при повторно-кратковременных режимах могут использоваться асинхронные электродвигатели с повышенными параметрами скольжения.
 Это обусловлено необходимостью остановки привода и фиксации вала при перебоях напряжения или его исчезновения.
Это обусловлено необходимостью остановки привода и фиксации вала при перебоях напряжения или его исчезновения.ПЛАВНЫЙ ПУСК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Логичным способом снижения пускового тока стало снижение напряжения, подаваемого на статор в момент запуска, с его постепенным увеличением при разгоне двигателя.
Простейший и наиболее старый способ плавного пуска – реостатный пуск электродвигателя: в цепь статора последовательно включается несколько мощных резисторов, последовательно закорачиваемых контакторами.
Также могут использоваться и дроссели высокой индуктивности (реакторы), а также автотрансформаторы.
Подобный способ плавного пуска имеет очевидные недостатки:
Проблематичность автоматизации.
Работа контакторов не привязывается к реальному значению тока, они либо переключаются вручную, либо перебираются с помощью реле времени автоматически.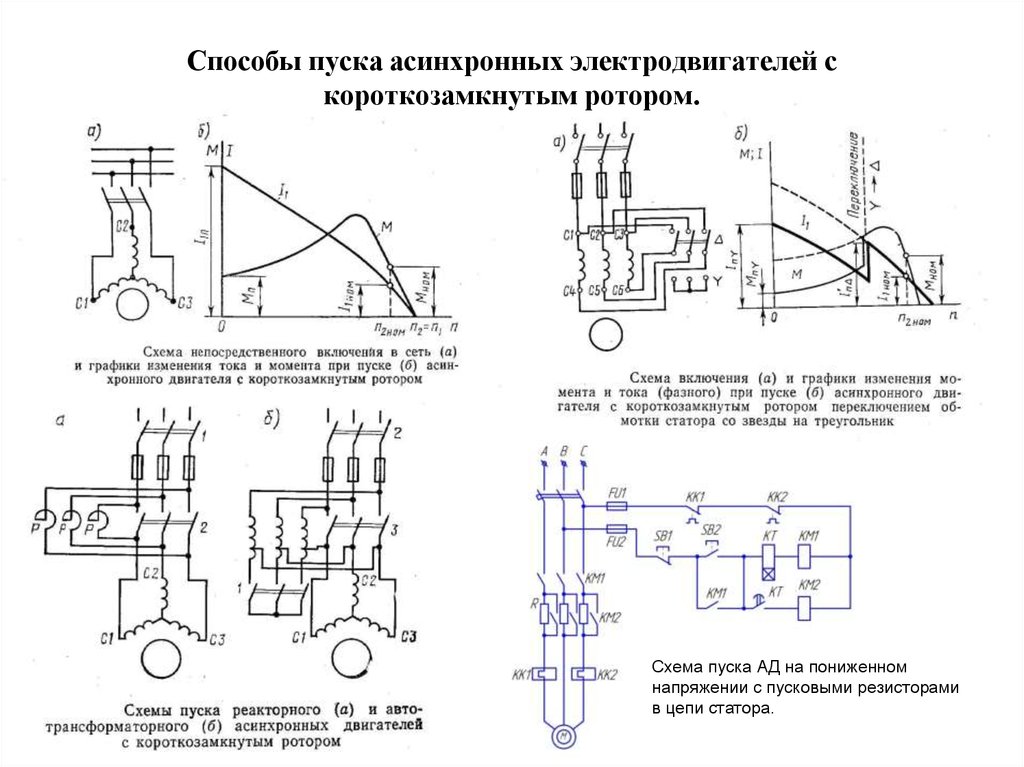
Усложнение пуска под нагрузкой.
Так как крутящий момент асинхронного двигателя пропорционален квадрату напряжения питания, снижение напряжения в момент пуска в 2 раза приведет к снижению крутящего момента в 4 раза. Применение плавного пуска с электродвигателями, напрямую подключенными к нагрузке, значительно увеличивает время выхода на рабочие обороты.
Совершенствование силовой электроники позволило создать компактные автоматические устройства плавного пуска (также называемые софтстартерами от английского soft start – «мягкий пуск») для асинхронных электродвигателей, устанавливаемые на стандартную монтажную рейку электрощитов.
Они обеспечивают не только плавный разгон, но и торможение двигателя, позволяя регулировать параметры токов пуска и остановки в различных режимах:
Постоянное токоограничение. В момент запуска ток ограничивается на заданном превышении номинального и удерживается на этой величине все время разгона двигателя. Обычно используется ограничение на уровне 200-300% номинального тока. Перегрузка становится малозначительной, хотя ее длительность возрастает. Формирование тока. В данном случае токовая кривая в момент включения двигателя имеет больший наклон, после чего софтстартер переходит в режим токоограничения.
Перегрузка становится малозначительной, хотя ее длительность возрастает. Формирование тока. В данном случае токовая кривая в момент включения двигателя имеет больший наклон, после чего софтстартер переходит в режим токоограничения.
Такой метод плавного пуска применяется при подключении к маломощным подстанциям или генераторам для снижения стартовой нагрузки, однако пусковой момент электродвигателя в данном случае минимален. Для устройств, лишенных холостого хода электродвигателя, использовать формирование тока с пологой стартовой кривой невозможно.
Ускоренный пуск (кик-старт). Применяется с двигателями, напрямую приводящими нагрузку, так как иначе их пусковой крутящий момент может оказаться недостаточным для страгивания ротора.
В этом случае устройство плавного пуска допускает кратковременное превышение пускового тока в несколько раз (фактически осуществляется прямая коммутация), по истечении заданного времени ток снижается до двух-трехкратного превышения номинала.
Останов на выбеге.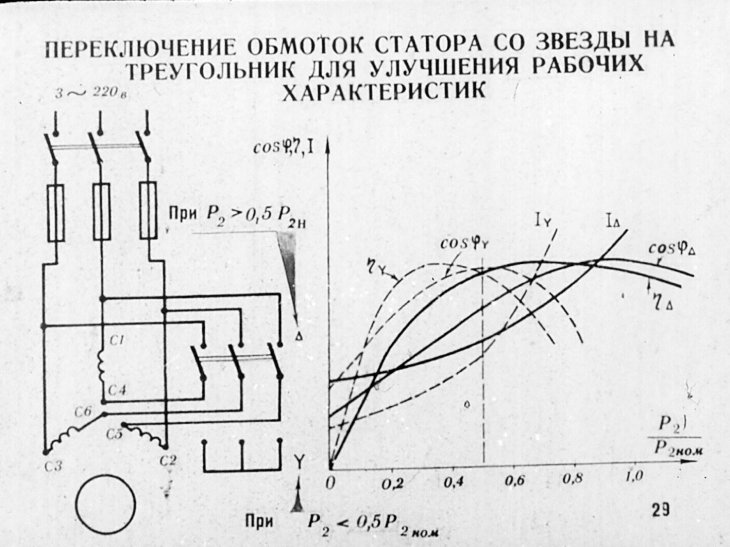 При отключении двигателя напряжение с него снимается полностью, вращение якоря продолжается по инерции. Наиболее простой способ коммутации, применимый при небольших мощностях и малой инерции привода.
При отключении двигателя напряжение с него снимается полностью, вращение якоря продолжается по инерции. Наиболее простой способ коммутации, применимый при небольших мощностях и малой инерции привода.
Однако в момент разрыва цепи происходит сильный индуктивный выброс, приводящий к сильному искрению в контакторах. На мощных электродвигателях, а также при высоких рабочих напряжениях данный способ отключения неприемлем.
Линейное снижение напряжения. Применяется для более плавной остановки двигателя. Нужно помнить, что крутящий момент двигателя при этом снижается нелинейно из-за квадратичной зависимости момента от напряжения, то есть снижение момента происходит наиболее резко в начале кривой.
Отключение питания происходит при минимальном токе в обмотке, соответственно коммутирующие выключатели практически не изнашиваются образованием искры между контактами.
Для снижения нагрузок при остановке применяется управляемое снижение напряжения:
- вначале ток снижается минимально;
- затем кривая начинает снижаться круче.
Снижение крутящего момента электродвигателя при этом близко к линейному. Этот способ управления остановом электродвигателя применяется в устройствах с высокой инерционностью привода.
При использовании такого рода устройств плавного пуска пусконаладочные работы заключаются в настройке нужного типа кривой пускового тока и, в случае использования режимов формирования тока или ускоренного старта, настройке длительности временного интервала начального участка кривой.
Применение устройств плавного пуска позволяет автоматизировать пусковой режим, но его главный минус остается – либо приходится закладывать в устройство возможность холостого хода электродвигателя, либо допускать кратковременные перегрузки сети, раскручивая мотор и нагрузку с кик-стартом.
Прямой пуск
При запуске ЭПТ токовая нагрузка растет вместе с увеличением значения крутящего момента, передаваемого на ротор. Этот момент характеризуется значительным ростом температуры обмотки статора, что может стать причиной повреждения изоляции и короткого замыкания.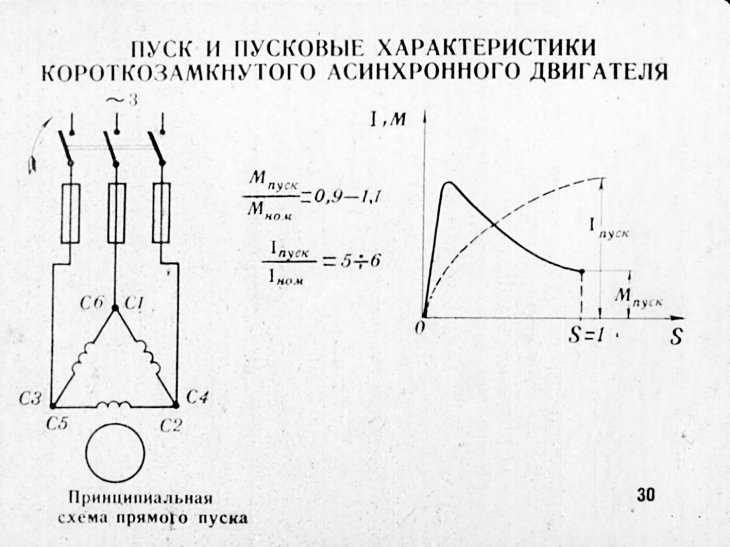 Резкое возрастание нагрузки чревато сильными вибрациями и приводит к механическому повреждению деталей мотора.
Резкое возрастание нагрузки чревато сильными вибрациями и приводит к механическому повреждению деталей мотора.
При прямом пуске проблема решается подключением обмотки якоря непосредственно к электроцепи, но при условии стабильности показателей электрического тока.
Прямой пуск электродвигателя ПТ используется для маломощных электродвигателей (с номиналом, не превышающим 1 кВт), и он самый простой в реализации. Рабочие температуры при этом растут не настолько сильно, как при использовании других способов пуска.
В случае интенсивной эксплуатации электродвигателя с частым включением/выключением его оснащают расцепителем, управляемым вручную. Его задача – подавать напряжение в момент пуска непосредственно на клеммы двигателя.
Метод пуска двигателя с пониженным напряжением – помехи напряжения
Пуск двигателей с помощью автотрансформатора широко используется для пуска больших промышленных двигателей благодаря его преимуществу, заключающемуся в обеспечении наивысшего пускового момента при наименьшем пусковом токе по сравнению с другими методами пуска с пониженным напряжением.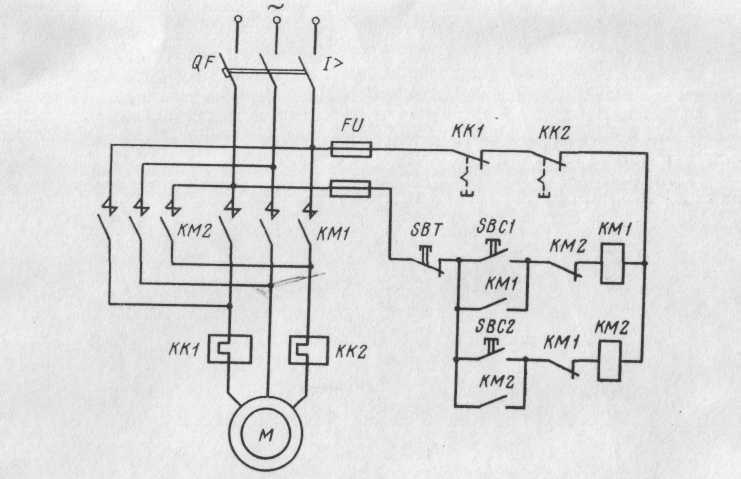 Они также известны как стартер Korndorfer . Проблем с пуском больших двигателей через линию много, некоторые из них связаны с чрезмерным падением напряжения и отключением чувствительного оборудования и т. д. На практике, если пуск двигателя через линию вызывает падение напряжения более чем на 80%, другие методы пуска необходимо исследовать. Одним из наиболее экономичных и надежных методов пуска при пониженном напряжении является пуск на основе автотрансформатора, который чаще всего используется в пускателях двигателей среднего напряжения.
Они также известны как стартер Korndorfer . Проблем с пуском больших двигателей через линию много, некоторые из них связаны с чрезмерным падением напряжения и отключением чувствительного оборудования и т. д. На практике, если пуск двигателя через линию вызывает падение напряжения более чем на 80%, другие методы пуска необходимо исследовать. Одним из наиболее экономичных и надежных методов пуска при пониженном напряжении является пуск на основе автотрансформатора, который чаще всего используется в пускателях двигателей среднего напряжения.
Ссылка на Калькулятор пуска двигателя , Калькулятор тока двигателя
Пуск через автотрансформатор включает установку автотрансформатора между двигателем и источником. Напряжение, подаваемое на вход автотрансформатора, уменьшается пропорционально настройке «отвода» автотрансформатора на выходе. Типичные настройки ответвлений для пускателей двигателей с автотрансформатором: 50 %, 65 %, 80 %.
Например, для установки ответвления автотрансформатора на 50 %, будет верно следующее:
1 Пусковой ток двигателя: Пусковой ток двигателя будет уменьшен пропорционально настройке отвода. Настройка отвода 50 % обеспечивает на 50 % меньший пусковой ток двигателя по сравнению с обычным пуском при полном напряжении.
Настройка отвода 50 % обеспечивает на 50 % меньший пусковой ток двигателя по сравнению с обычным пуском при полном напряжении.
2 Линейный ток: Линейный ток изменяется пропорционально квадрату приложенного напряжения. Отвод на 50 % снизит линейный ток на 25 % по сравнению с пуском при полном напряжении. Линейный ток определяет просадку (или провал) напряжения в системе во время пуска двигателя. Уменьшение тока пусковой линии поможет уменьшить величину провала пускового напряжения двигателя.
3 Момент двигателя: Момент двигателя зависит от квадрата приложенного напряжения. При настройке отвода 50 % крутящий момент составит только 25 % по сравнению с пуском при полном напряжении.
Автотрансформатор на 80% Отвод
Рассмотрим трехфазный пускатель двигателя на основе автотрансформатора, соединенный звездой, как показано на рисунке ниже.
Схема автотрансформаторного стартераЭквивалентная схема автотрансформаторного стартера
Линейный ток с авто
трансформатор уменьшается квадратично пропорционально настройке отвода авто
трансформатор.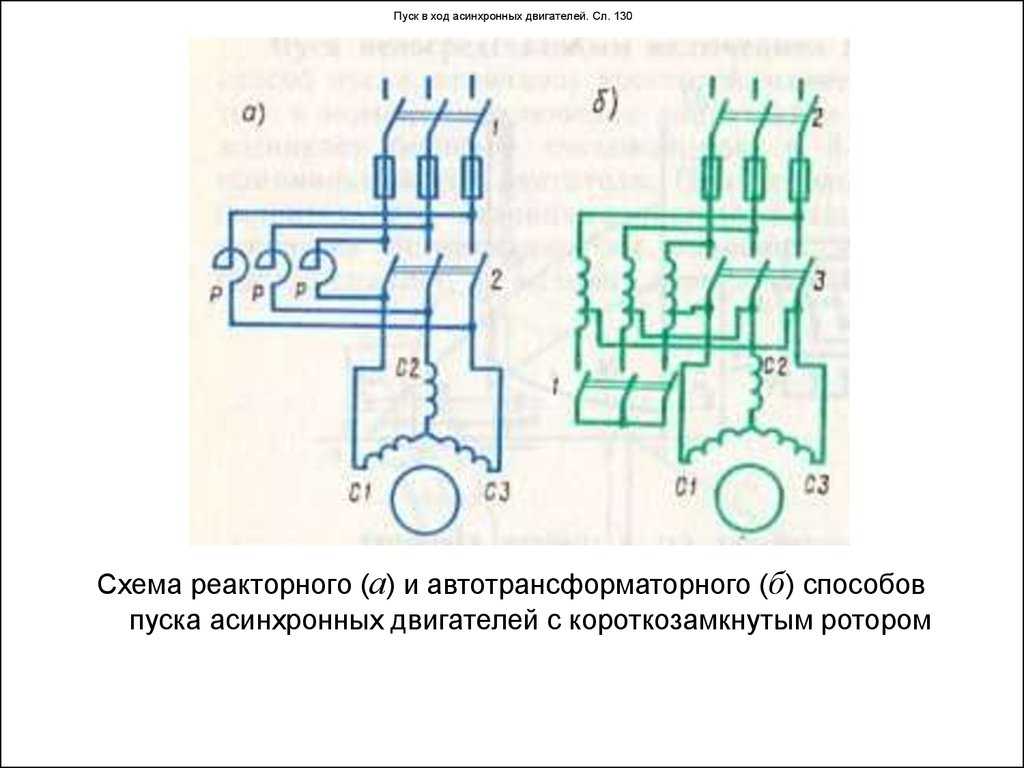 Отвод 50% снизит ток в линии на 25%.
Отвод 50% снизит ток в линии на 25%.
Пусковой момент с автотрансформатором изменяется квадратично пропорционально приложенному напряжению. Отвод на 50 % (следовательно, на 50 % меньшее напряжение) снизит крутящий момент двигателя на 25 %.
Расчет пускового тока автотрансформатора
********************************************** ******************************************************* ******************************************************* ****
Работа практического автотрансформаторного пускателя
Схема автотрансформатора
стартер показан ниже. Есть три основных контактора, которые играют решающую роль
в автотрансформаторе пониженное напряжение пуска. Они пусковой контактор ‘S’ , основной
контактор «M» и рабочий контактор
«Р» . Читателям предлагается определить их на рисунке ниже.
Убедитесь, что пусковой контактор «S» соединяет все три фазы системы вместе, создавая нейтральную точку. Эта «нейтраль» будет внутренней по отношению к пускателю и будет иметь нулевой потенциал. Эта точка не должна быть заземлена.
Эта «нейтраль» будет внутренней по отношению к пускателю и будет иметь нулевой потенциал. Эта точка не должна быть заземлена.
Автотрансформаторный пускательСхема управления автотрансформаторным пускателем
Последовательность пуска автотрансформаторного пускателя следующая:
Когда кнопка пуска
первоначально нажата, катушка пускового реле «SC» получает питание по пути
показано.
Это, в свою очередь, замыкает нормально разомкнутый контакт пускового реле «SR» и подает питание на катушку главного реле «MC», которая, в свою очередь, замыкает контакт «MR».
В силовой цепи этот
последовательность приводит к замыканию пускового контактора «S» и главного контактора «M»
и двигатель подключается к источнику питания и начинает разгоняться. Для
настройки отвода, показанные на рисунке выше (65 %), только 65 % напряжения питания
подается через обмотки двигателя. При пониженном напряжении, приложенном к
обмотки, двигатель начинает разгоняться и набирать скорость. С уменьшенным
С уменьшенным
напряжения, полностью нагруженный двигатель перестанет разгоняться через некоторое время. В этот
мгновенное (которое должно быть либо рассчитано, либо установлено на основе проб и ошибок или
прислушиваясь к шуму мотора) ‘переход
реле задержки» разомкнется там, обесточив «катушку пускового реле», которая
размыкает контакт «SR». Эта задержка перехода может быть получена несколькими способами:
1 Выполнение анализа пуска двигателя
2 Наблюдая высокий пусковой шум двигателя и время, когда двигатель прекращает разгон
3 Если реле двигателя имеет автотрансформатор доступных функций, затем используйте один из следующих:
* Текущий базовый переход (наиболее предпочтительный): В этом типе управления переходом реле задержки перехода размыкается только после того, как ток двигателя упадет ниже определенного установленного значения (обычно около 125% полной нагрузки двигателя). В реле необходимо запрограммировать отдельный таймер неполной последовательности, и если ток двигателя не упадет ниже установленного уровня тока за указанное время, реле должно инициировать отключение автоматического выключателя двигателя.
В реле необходимо запрограммировать отдельный таймер неполной последовательности, и если ток двигателя не упадет ниже установленного уровня тока за указанное время, реле должно инициировать отключение автоматического выключателя двигателя.
* Переход по току и времени : В этом типе управления переходом реле задержки перехода размыкается только после того, как ток двигателя упадет ниже определенного заданного значения (обычно около 125% полной нагрузки двигателя) и отдельный таймер истек.
* Переход по времени (наименее предпочтительный): В этом типе управления переходом реле задержки перехода размыкается по истечении установленного таймера независимо от тока двигателя. Недостаток этой схемы заключается в том, что даже если двигатель заблокирован или по другой причине не может разогнаться, или таймер установлен неправильно, контактор ПУСК разомкнется, а контактор РАБОТА замкнется. В случае заклинивания двигателя контактор ПУСК должен будет прервать высокоиндуктивный ток блокировки ротора двигателя, который был причина многих отказов автотрансформатора .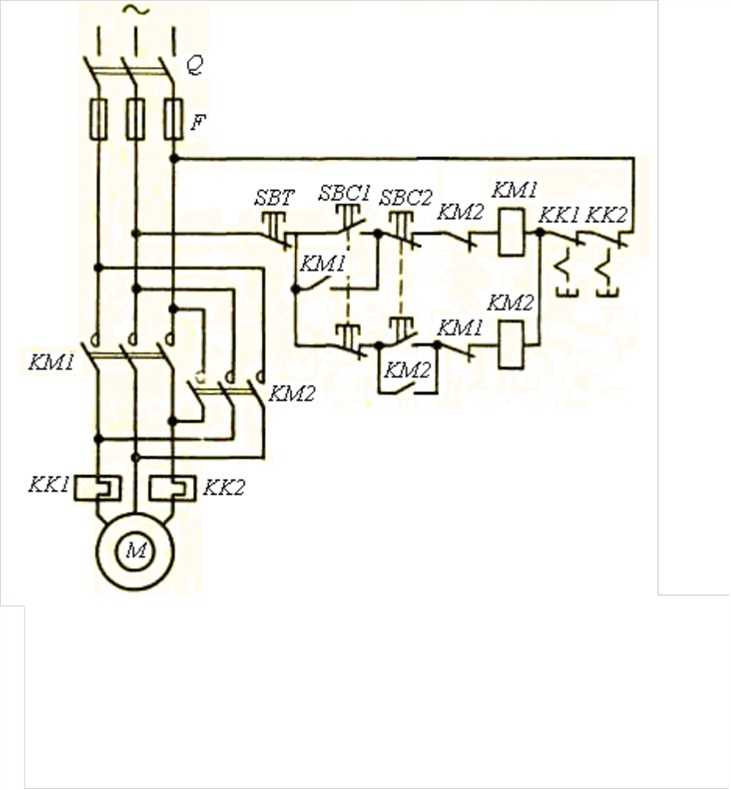
После обесточивания «катушки пускового реле» автотрансформатор
действует как последовательный реактор до момента замыкания рабочего контактора. Это означает
двигатель всегда подключен к источнику питания и нет временного
отключение от источника (как пускатель звезда-треугольник). Сделать к тому, что
двигатель всегда подключен к источнику, не будет большого тока или крутящего момента
пульсация при переходе.
Обесточивание катушки пускового реле
подаст питание на контакт реле работы «RC», который замкнет контактор «RUN». Автотрансформатор
теперь не является частью цепи, и двигатель получает полное напряжение на своей
обмотки и разгонится до своей синхронной скорости. Это пусковая последовательность для большинства коммерческих автомобильных трансформаторов.
стартеры конструкции .
Для остановки двигателя отпустите
кнопка «Стоп» на рисунке выше, которая разблокирует все реле
тем самым размыкая контакторы «Основной» и «Работа».
Типичный пусковой ток автотрансформатора соответствует приведенной ниже схеме.
Пусковая последовательность автотрансформатора для «перехода на основе тока»
Другие соображения
1 Если двигатель соединен звездой, автотрансформатор предпочтительно должен быть соединен звездой, а если двигатель соединен треугольником, то автотрансформатор предпочтительно подключать дельта.
2 Вместо трехфазного соединения звездой можно использовать два однофазных автотрансформатора . Это приемлемо с точки зрения начальной производительности. Однако при использовании двух однофазных автотрансформаторов во время пуска напряжения на клеммах будут временно несбалансированными. Это может вызвать повышенный нагрев при разгоне двигателя.
3 Сообщается о множестве отказов автотрансформатора перенапряжения ответвления. Некоторые соображения по проектированию для смягчения этих инцидентов:
a) Используйте автотрансформаторы с тремя катушками и тремя ножками вместо старой практики использования конструкций с двумя катушками и тремя ножками.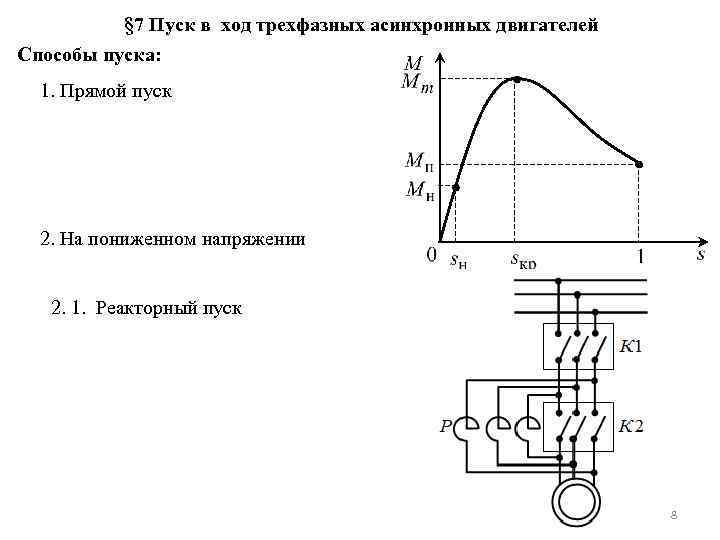
b) Использовать ток как основу перехода, а не только время . Как только ток упадет ниже установленного значения (обычно 125%), может произойти переход. Если ток не падает ниже установленного значения после установленной задержки, пускатель должен быть настроен на отключение по ошибке. Также допустим переход по току и времени (текущее + время).
4 Учитывайте нагрев автотрансформатора (наряду с нагревом двигателя) при принятии решения о максимально допустимых пусках в час. Как и двигатель, автотрансформатор также быстро нагревается во время фазы запуска двигателя. Если между пусками не будет обеспечено достаточное время охлаждения, обмотки могут выйти из строя из-за перегрева.
5 Включите ограничители перенапряжения в пускатель автотрансформатора.
6 Встроенная защита двигателя от перенапряжения для защиты двигателя от переходных процессов, вызывающих повреждение из-за включения вакуумного контактора в пускателе.
Дополнительное чтение:
Дифференциальная защита двигателя, калькулятор тока двигателя, калькулятор пускового тока двигателя
Автотрансформаторный пускатель — руководство по электротехнике
Автотрансформаторные пускатели обычно используются с двигателями переменного тока с короткозамкнутым ротором номинальной мощностью более 20 л. с. Двигатели этой номинальной мощности потребляют чрезмерный пусковой ток при использовании пускателя по схеме звезда/треугольник.
с. Двигатели этой номинальной мощности потребляют чрезмерный пусковой ток при использовании пускателя по схеме звезда/треугольник.
Это может вызвать чрезмерную нагрузку на двигатель и привести к сильным провалам напряжения. Это может оказаться вредным для двигателя в долгосрочной перспективе и может нарушить работу машин, подключенных к той же линии. Поэтому рекомендуется использовать автотрансформаторный пускатель с двигателями мощностью более 20 л.с.
Кроме того, они обеспечивают самый высокий пусковой момент при самом низком пусковом токе линии по сравнению с другими пускателями пониженного напряжения, поэтому они широко используются для пуска больших асинхронных двигателей с короткозамкнутым ротором.
Кроме того, высоковольтные электродвигатели переменного тока с короткозамкнутым ротором соединены звездой, чтобы уменьшить нагрузку напряжения на изоляцию обмотки. Таким образом, мы не можем использовать с ними пускатели звезда-треугольник, и единственным выбором является пускатель автотрансформатора.
Однако, если допустим низкий пусковой крутящий момент и позволяют обстоятельства, можно также использовать пускатели звезда/треугольник, поскольку они являются дешевой альтернативой.
Когда пускатель со звезды/треугольника изменяет соединения двигателя со звезды на треугольник, генерируется высокий переходный ток , что может привести к ложному срабатыванию других машин, подключенных к той же линии. Это также приводит к механическому рывку машины, что в некоторых случаях может привести к ее сильному износу. Стартер с автотрансформатором решает обе эти проблемы.
Такие пускатели состоят из автотрансформатора с необходимыми приспособлениями. В момент пуска на двигатель через отводы автотрансформатора подается пониженное напряжение. Двигатель получает более низкое пусковое напряжение в соответствии с выбором ответвления. Кроме того, двигатель потребляет меньший пусковой ток и, соответственно, развивает меньший пусковой момент.
Когда двигатель достигает 80 % своей нормальной скорости, автотрансформаторы отключаются, и на двигатель подается полное напряжение питания. Переключатель, выполняющий эти изменения с «пуска» на «работу», может быть с воздушным прерывателем (для небольших двигателей) или может быть погружен в масло (для больших двигателей) для уменьшения искрения.
Переключатель, выполняющий эти изменения с «пуска» на «работу», может быть с воздушным прерывателем (для небольших двигателей) или может быть погружен в масло (для больших двигателей) для уменьшения искрения.
Большинство автоматических пускателей оснащены 3 наборами отводов для снижения напряжения до 80, 65 или 50 процентов от сетевого напряжения в соответствии с местными условиями электроснабжения.
Большинство асинхронных двигателей с короткозамкнутым ротором можно успешно запустить при 65 процентах сетевого напряжения. Там, где эта доля сетевого напряжения не обеспечивает достаточный пусковой момент, можно использовать отвод 80 процентов. Там, где отвод 50% создает чрезмерное падение напряжения, можно использовать отводы 65%.
| Autotransformer tapping | 50% | 65% | 80% |
| Motor Starting Current | 50% | 65% | 80% |
| Line Current | 25% | 42% | 64% |
| Начальный крутящий момент | 25% | 42% | 64% |
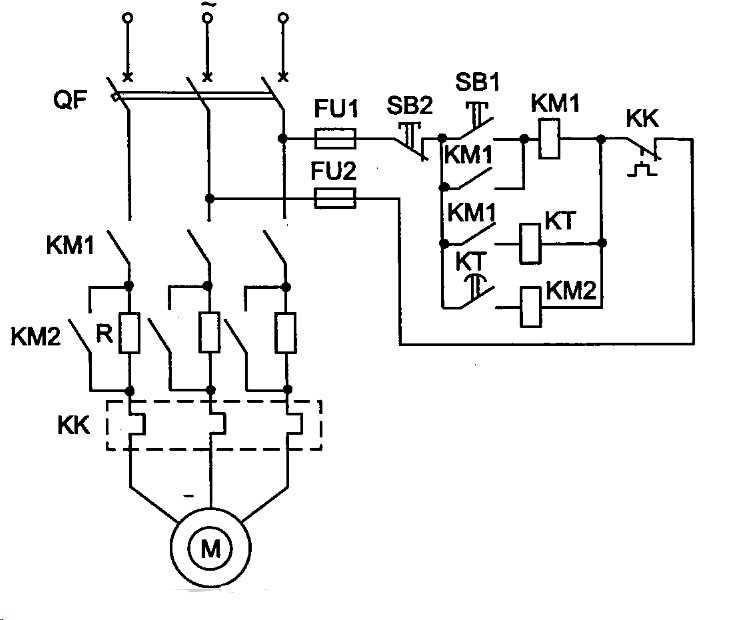 0028 Схема управления пускателем автотрансформатора
0028 Схема управления пускателем автотрансформатора
 Таким образом, пользователь может выбрать наилучшее ответвление в соответствии с потребностью в пусковом моменте и местными условиями, такими как напряжение и падение напряжения во время ввода в эксплуатацию пускателя.
Таким образом, пользователь может выбрать наилучшее ответвление в соответствии с потребностью в пусковом моменте и местными условиями, такими как напряжение и падение напряжения во время ввода в эксплуатацию пускателя. youtube.com/embed/ZADxLxHP0-s?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
youtube.com/embed/ZADxLxHP0-s?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>  В тот момент, когда двигатель запрашивается для работы и он подключен к сети, он показывает относительно небольшой импеданс, который зависит от скорости вращения: как следствие, он вызывает большой ток, пропорциональный напряжению питания, до тех пор, пока его скорость стабилизировалась до конечного режима. Это, в свою очередь, влияет на стабильность сети питания, поскольку она используется с номиналом выше нормального, а также на сам двигатель; все это дополнительно усиливается при частых запусках экземпляров.
В тот момент, когда двигатель запрашивается для работы и он подключен к сети, он показывает относительно небольшой импеданс, который зависит от скорости вращения: как следствие, он вызывает большой ток, пропорциональный напряжению питания, до тех пор, пока его скорость стабилизировалась до конечного режима. Это, в свою очередь, влияет на стабильность сети питания, поскольку она используется с номиналом выше нормального, а также на сам двигатель; все это дополнительно усиливается при частых запусках экземпляров.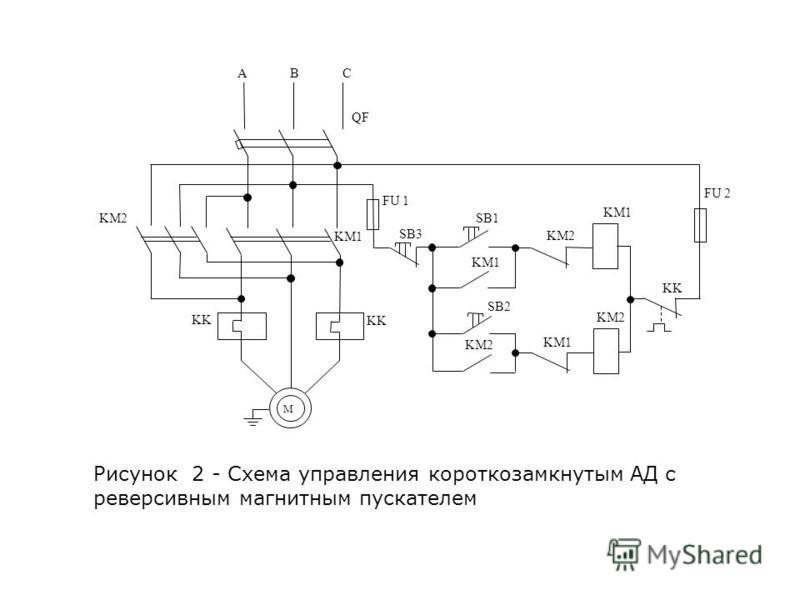 Это возвращает пусковое напряжение двигателя обратно к полному напряжению, чтобы затем он мог работать с полной скоростью и нагрузкой.
Это возвращает пусковое напряжение двигателя обратно к полному напряжению, чтобы затем он мог работать с полной скоростью и нагрузкой.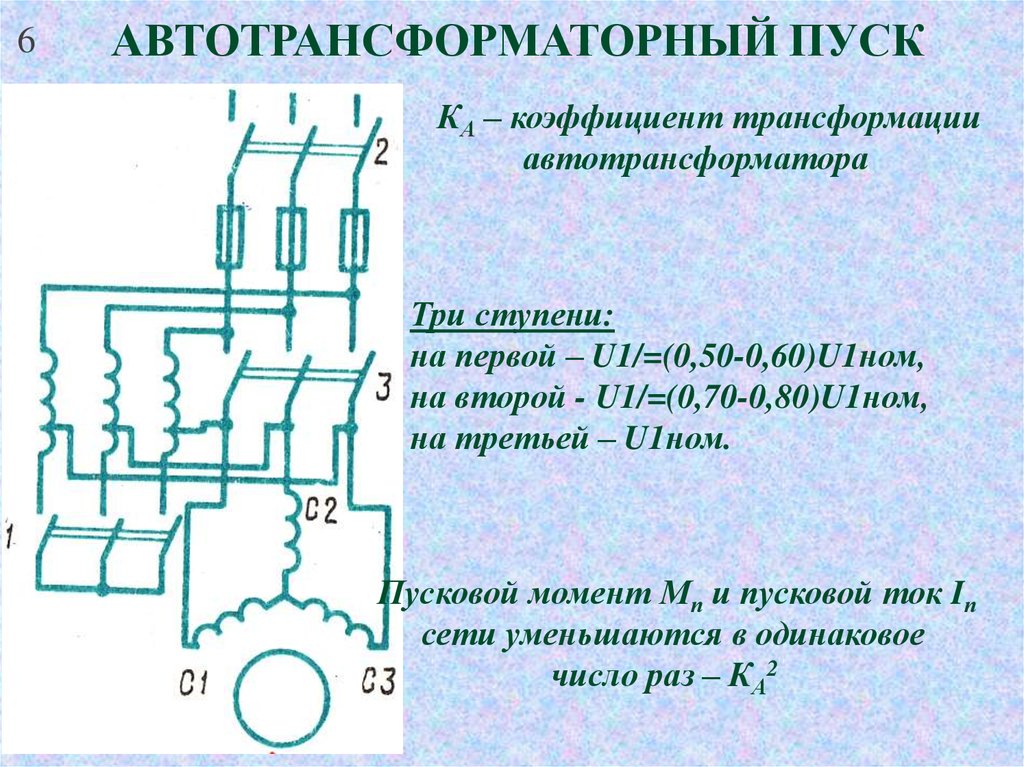 Однако запросы на более тяжелые рабочие циклы могут быть удовлетворены, если потребности более строгие.
Однако запросы на более тяжелые рабочие циклы могут быть удовлетворены, если потребности более строгие.