Содержание
Драйвер шагового двигателя a4988 в Украине. Цены на Драйвер шагового двигателя a4988 на Prom.ua
Работает
Драйвер шагового двигателя A4988 Arduino
На складе в г. Вознесенск
Доставка по Украине
41 грн
Купить
ArduinoKit обучающие наборы
Работает
Драйвер шагового двигателя A4988 3D принтер [#4-5]
На складе в г. Запорожье
Доставка по Украине
45 грн
Купить
Ardu.prom.ua (наложка НП от 150 грн!)
Работает
Драйвер шагового двигателя A4988
На складе в г. Полтава
Доставка по Украине
55.80 грн
Купить
Интернет магазин «E-To4Ka»
Работает
Драйвер шагового двигателя A4988, RAMPS, Arduino
Доставка по Украине
94 грн
90 грн
Купить
ІНТЕРНЕТ-МАГАЗИН «ЗАКУПИСЬ»
Работает
Драйвер шагового двигателя DRV8825, 3D принтер (аналог A4988) [#B-6]
На складе в г. Запорожье
Запорожье
Доставка по Украине
75 грн
Купить
Ardu.prom.ua (наложка НП от 150 грн!)
Работает
Драйвер шагового двигателя A4988
На складе в г. Одесса
Доставка по Украине
124 грн
Купить
Интернет-магазин DIYelectronics
Работает
Драйвер шагового двигателя A4988
На складе в г. Полтава
Доставка по Украине
55.80 грн
Купить
IT Electronics
Работает
Драйвер шагового двигателя A4988
Доставка по Украине
58.80 грн
Купить
РезиStore
Работает
Драйвер шагового двигателя A4988 с радиатором охлаждения
Доставка из г. Кривой Рог
43 грн
Купить
Онлайн-магазин «КласМагаз»
Работает
Драйвер шагового двигателя A4988, RAMPS, Arduino 2000-02998
На складе в г. Ровно
Доставка по Украине
55 грн
Купить
ПОЛЕЗНЫЕ МЕЛОЧИ
Работает
Драйвер шагового двигателя A4988, RAMPS, Arduino
Доставка из г.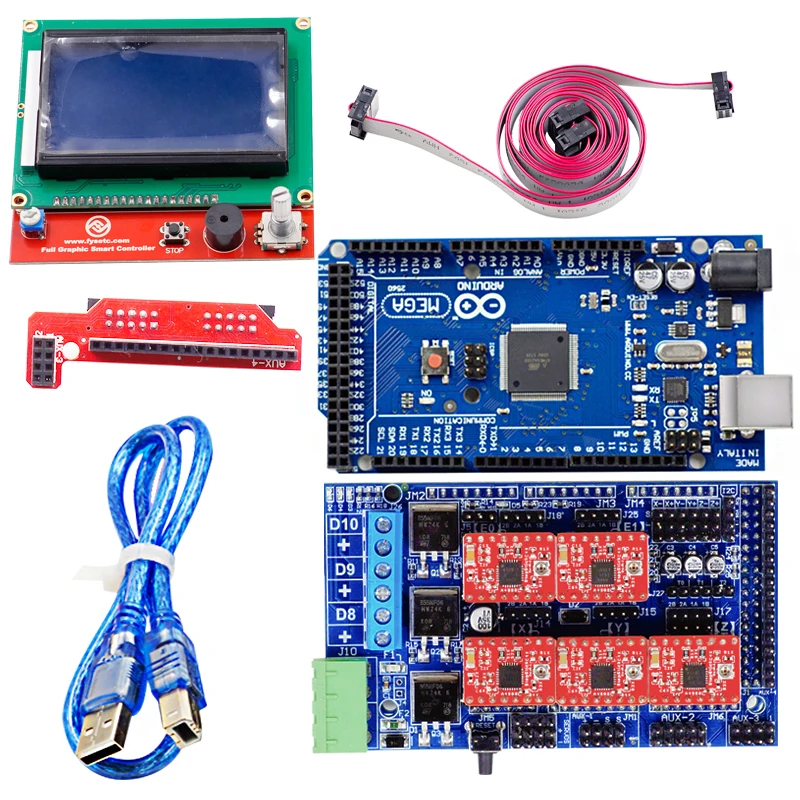 Ровно
Ровно
55 грн
Купить
freedelivery
Работает
Драйвер шагового двигателя A4988, RAMPS, Arduino
На складе
Доставка по Украине
70 — 96 грн
от 3 продавцов
100 грн
70 грн
Купить
AZON — супермаркет низких цен
Работает
Драйвер шагового двигателя A4988
Доставка из г. Полтава
55.80 грн
Купить
Интернет-магазин «Налетай»
Работает
Драйвер шагового двигателя A4988
Доставка из г. Полтава
55.80 грн
Купить
Интернет-магазин «Налетай»
Работает
Драйвер шагового двигателя A4988
Доставка из г. Умань
50 грн
Купить
Интернет-магазин «FreeBuy.in.ua»
Смотрите также
Работает
Драйвер шагового двигателя A4988
Доставка из г. Полтава
55.80 грн
Купить
МегаШара — Интернет-магазин
Работает
Драйвер шагового двигателя A4988, RAMPS, Arduino
Заканчивается
Доставка по Украине
по 55 грн
от 3 продавцов
55 грн
Купить
Магазин «Панас»
Работает
Драйвер шагового двигателя A4988, RAMPS, Arduino
На складе в г.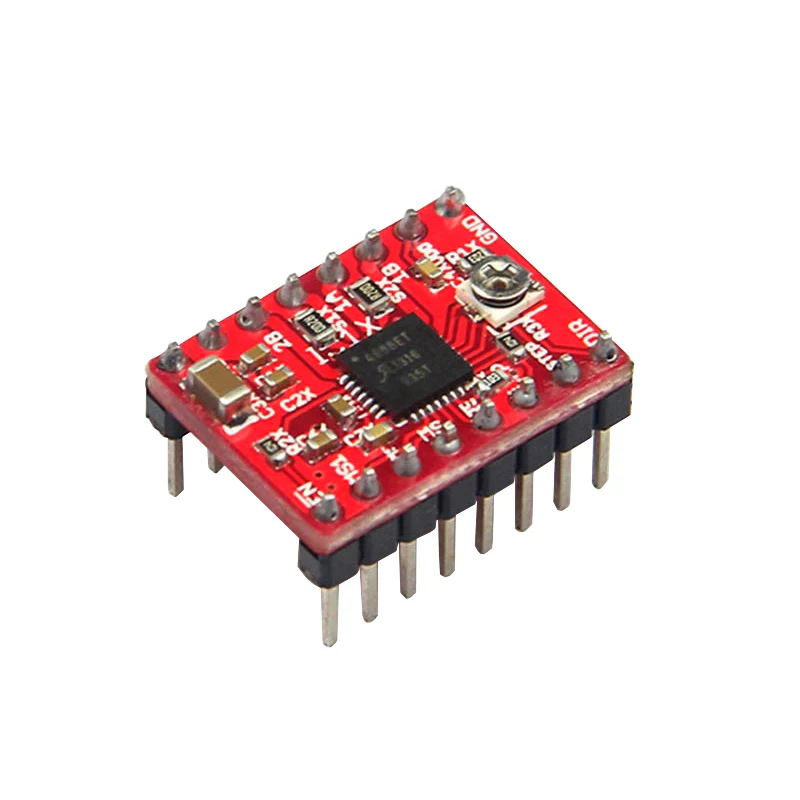 Ровно
Ровно
Доставка по Украине
55 грн
Купить
Double-Shop
Работает
A4988 драйвер шагового двигателя (Polulu)
Доставка из г. Киев
60 грн
Купить
MA store
Работает
Драйвер шагового двигателя A4988
Доставка из г. Полтава
58.80 грн
Купить
USCompany
Работает
Драйвер шагового двигателя для 3Д принтеров A4988
Доставка из г. Кропивницкий
41 грн
Купить
Montis — комплектующие для систем автоматизации
Работает
Драйвер шагового двигателя A4988, RAMPS, Arduino
На складе
Доставка по Украине
202 грн
Купить
Інтернет-магазин MINE — затребувані товари для домашнього побуту і комфорту
Работает
Драйвер шагового двигателя A4988 красный
Доставка из г. Одесса
97.80 грн
Купить
Интернет магазин «controller.in.ua»
Работает
Драйвер шагового двигателя A4988
Доставка из г.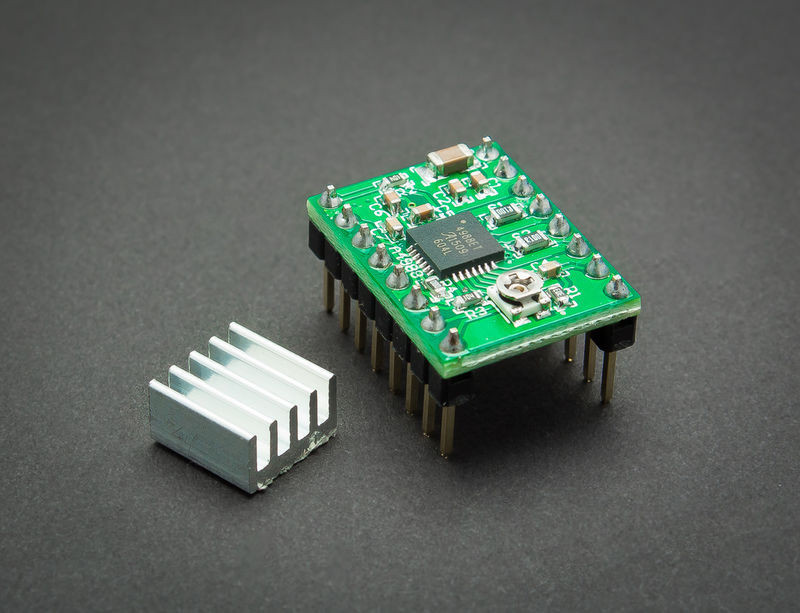 Одесса
Одесса
97.80 грн
Купить
Интернет магазин «controller.in.ua»
Работает
Драйвер крокового двигуна A4988, RAMPS
Доставка из г. Львов
65 грн
Купить
Работает
Плата адаптера драйвера шагового двигателя A4988/DRV8825
На складе
Доставка по Украине
47.20 грн
Купить
Магазин «Солдер»
Работает
Модуль драйвера шагового двигателя A4988 Red
На складе
Доставка по Украине
49.20 грн
Купить
Магазин «Солдер»
Работает
Драйвер шагового двигателя A4988, RAMPS, Arduino Без бренда
Доставка по Украине
72 грн
Купить
«Ценовал»
Работает
Драйвер шагового двигателя A4988, RAMPS, Arduino
На складе
Доставка по Украине
152 грн
126 грн
Купить
Promsnab
А4988. Драйвер шагового двигателя А4988
А4988 — популярный драйвер для управления шаговыми двигателями. Степпер – мотор, работающий не плавно, а прерывисто, шагами, вращая вал на определенное количество градусов за один шаг. Шаговые электродвигатели бывают одно и двухполярными. В настоящее время практически все выпускаемые – гибридные. Их преимущество в том, что ход их более плавный и точный из-за маленького угла перемещения (обычно 1,8 градуса). Такой маленький ход возможен из-за подачи тока на две соседние катушки одновременно, что позволяет останавливать вал между ними. Используются такие моторы часто в различных приборах: 3D-принтерах, станках с ЧПУ, плоттерах, лазерных граверах и других электронных приборах. Для работы с шаговыми электродвигателями и необходим А4988.
Степпер – мотор, работающий не плавно, а прерывисто, шагами, вращая вал на определенное количество градусов за один шаг. Шаговые электродвигатели бывают одно и двухполярными. В настоящее время практически все выпускаемые – гибридные. Их преимущество в том, что ход их более плавный и точный из-за маленького угла перемещения (обычно 1,8 градуса). Такой маленький ход возможен из-за подачи тока на две соседние катушки одновременно, что позволяет останавливать вал между ними. Используются такие моторы часто в различных приборах: 3D-принтерах, станках с ЧПУ, плоттерах, лазерных граверах и других электронных приборах. Для работы с шаговыми электродвигателями и необходим А4988.
В самом сердце находится микросхема Allegro MicroSystems, DMOS Microsteping с транслятором и защитой от перегрузки током. Это интегрированный контроллер мотора делает взаимодействие с микроконтроллером легким. Требуется лишь два пина, чтобы контролировать и направление движения и скорость.
Рассмотрим основные характеристики. Он имеет максимальную мощность 3,5 В и плюс-минус 2А. Он подходит и для маленьких и средних моторов, но он должен быть биполярным. К примеру, для NEMA 17 он подойдет, а для NEMA 23 лучше брать TB6600. Чип имеет несколько хороших функций безопасности: защита от перегрева и от скачков напряжения. Логическое напряжение – от трех вольт до пяти, что делает его совместимым с самыми популярными платами Arduino. Важной характеристикой является возможность настройки электромотора на микрошаги. Режим может быть целый шаг, одна вторая, одна четвертая, одна восьмая и одна шестнадцатая.
Он имеет максимальную мощность 3,5 В и плюс-минус 2А. Он подходит и для маленьких и средних моторов, но он должен быть биполярным. К примеру, для NEMA 17 он подойдет, а для NEMA 23 лучше брать TB6600. Чип имеет несколько хороших функций безопасности: защита от перегрева и от скачков напряжения. Логическое напряжение – от трех вольт до пяти, что делает его совместимым с самыми популярными платами Arduino. Важной характеристикой является возможность настройки электромотора на микрошаги. Режим может быть целый шаг, одна вторая, одна четвертая, одна восьмая и одна шестнадцатая.
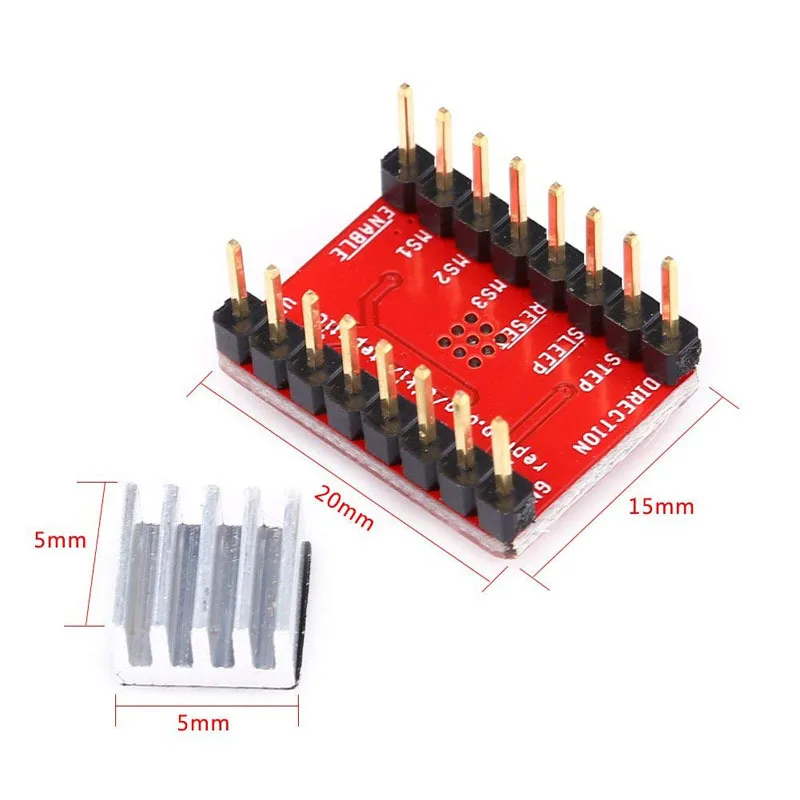
Для подключения и настройки Драйвера А4988 нам потребуются следующие предметы. В первую очередь, сам аппарат и шаговый биполярный двигатель. Платформа Arduino (например, UNO) и комплект проводов для соединения деталей. На самом устройстве 16 входов/выходов, по восемь с каждой стороны.
На одной стороне:
- направление вращения, 1 в одну сторону, 0 в другую.

- шаг, когда на него поступает логическая единица, то устройство вращает вал на один этап. Когда единица сменяется нулем и приходит еще одна единица – совершается еще один этап.
- спящий режим, единственный вывод с логической единицей по умолчанию, если подать ноль, то он заснет.
- сброс, перезагружает его, если на нем логический ноль, поэтому для нормальной работы надо подать сюда 1.
- три пина, задающие скорость. Подключение можно давать на несколько сразу. В зависимости от этих комбинаций будет меняться скорость. Комбинация есть в схеме, поставляемой с прибором.
- выключение.

Вторая сторона:
- масса
- питание цифровой части
- «ноги» для управления электромотором, две фазы.
- масса движка
- его питание
Главное помнить, что все работы производятся только при выключенном приборе!
Если Вы не можете найти схему Вашего степпера, то трудно будет понять, как правильно его подключить. Здесь требуется только определить пары проводов, соединенные с катушками. Есть небольшой трюк, как это сделать. Повращайте вал рукой, почувствуйте силу сопротивления. Возьмите пару проводов и соедините их оголенными концами, опять повращайте вал. Если сопротивление увеличилось, то Вы обнаружили правильную пару из одной катушки, если нет, попробуйте другое сочетание. Так пару от одной катушки подключаем к 1А и 1В, а другую к 2А и 2В, полярность в этом случае значения не имеет.
Здесь требуется только определить пары проводов, соединенные с катушками. Есть небольшой трюк, как это сделать. Повращайте вал рукой, почувствуйте силу сопротивления. Возьмите пару проводов и соедините их оголенными концами, опять повращайте вал. Если сопротивление увеличилось, то Вы обнаружили правильную пару из одной катушки, если нет, попробуйте другое сочетание. Так пару от одной катушки подключаем к 1А и 1В, а другую к 2А и 2В, полярность в этом случае значения не имеет.
Потом подключаем питание движка, обычно оно от 8 до 35 Вольт. Питание драйвера подается отдельно, нужен источник от 3 до 5 Вольт. Подключим его к платформе Arduino, все равно для программирования будем брать именно ее.
Прежде чем начать программировать на Ардуино, не поленитесь сделать одну серьезную вещь. Установите текущий предел тока. Это необходимо для защиты, если этого не сделать, то на двигатель может поступить больше напряжения, что повредит все устройство. На плате для этого есть потенциометр. Для расчета возьмем формулу:
Для расчета возьмем формулу:
Vref = Imax × (8 × Rcs)
Imax – ток двигателя, указанный в спецификации. Рассчитанное значение – напряжение, которое должно быть между минусом питания драйвера и самим потенциометром. Крутим его и напряжение меняется. При правильно подобранном напряжении все работает плавно, не пропускаются шаги и достаточно тихо без лишних вибраций.
Не забудьте установить радиатор для охлаждения иначе он может перегреться.
Теперь, когда физически все подключено и предел тока установлен, пришло время подключить Ардуино к компьютеру и задать первый пробный код. Все программное управление происходит с помощью Arduino IDE. Этот софт абсолютно бесплатный и находится в открытом доступе. Скачиваем на свой компьютер программу, запускаем ее, предварительно установив драйвер для платформы, которую Вы использовали при подключении мотора. В случае с самым простым запуском, нет необходимости загружать и использовать библиотеки, достаточно скачать нужный скетч, каких в Интернете предостаточно, вставить свои данные и работа обеспечена.
Существуют и очень удобные библиотеки, особенно в англоязычных источниках. Можно посоветовать попробовать свои силы на начальном этапе с библиотекой AccelStepper, написанная Майком Макколи. Одним из преимуществ этой библиотеки является поддержка режимов ускорения и замедления и многие приятные функции.
Шаговые двигатели произвели настоящую революцию в производстве цифровых устройств. Их использование повсеместно, даже начинающему конструктору без них не обойтись. Но любым аппаратом надо управлять. Для данного типа моторов незаменим Драйвер А4988, простой в использовании, совместимый с популярной платформой Arduino и доступный по цене. Простое программное обеспечение, не требующее серьезных знаний языка С++, делает создание цифровых электронных устройств доступным любому.
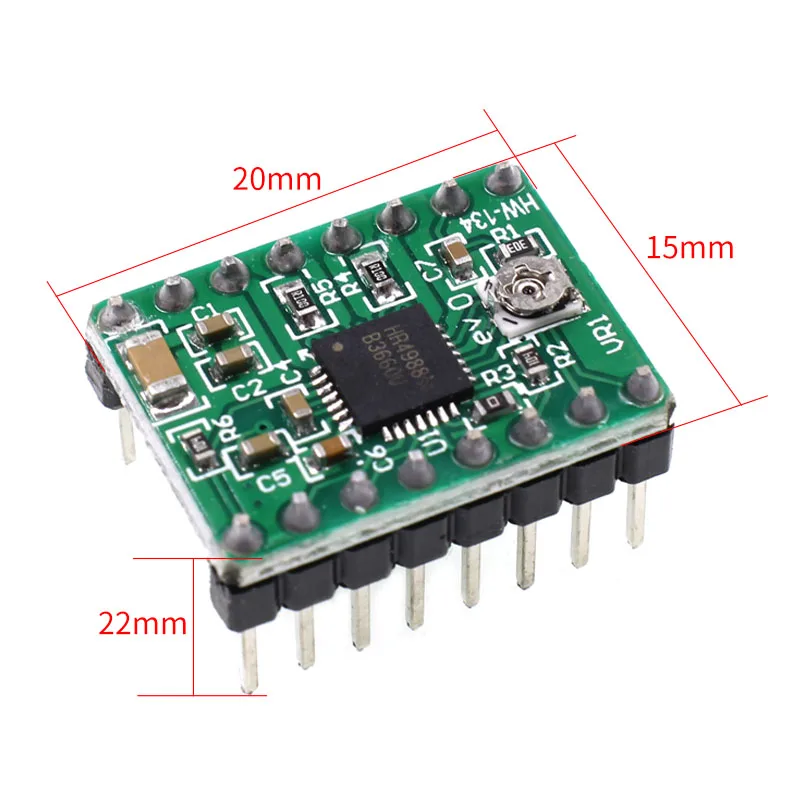
Драйвер шагового двигателя A4988 — ProGDron.com
Характеристики:
модель: A4988;
напряжения питания: от 8 до 35 В;
возможность установки шага: от 1 до 1/16 от максимального шага;
напряжение логики: 3-5. 5 В;
5 В;
защита от перегрева;
максимальный ток на фазу: 1 А без радиатора, 2 А с радиатором;
расстояние между рядами ножек: 12 мм;
размер платы: 20 х 15 мм;
габариты драйвера: 20 х 15 х 10 мм;
габариты радиатора: 9 х 5 х 9 мм;
вес с радиатором: 3 г;
вес без радиатора: 2 г.
Описание и Схемы подключения здесь.
Плата создана на базе микросхемы A4988 компании Allegro — драйвера биполярного шагового двигателя. Особенностями A4988 являются регулируемый ток, защита от перегрузки и перегрева, драйвер также имеет пять вариантов микрошага (вплоть до 1/16-шага). Он работает от напряжения 8 — 35 В и может обеспечить ток до 1 А на фазу без радиатора и дополнительного охлаждения (дополнительное охлаждение необходимо при подаче тока в 2 A на каждую обмотку).
Описание:
Драйвер создан на базе микросхемы управления шаговым двигателем компании Allegro A4988, изготовленной по ДМОП-технологии с регулятором и защитой по току, поэтому мы настоятельно рекомендуем, перед использованием этого продукта, ознакомиться со спецификацией A4988 (1MB pdf). Этот драйвер позволит управлять биполярным шаговым двигателем с выходным током до 2 А на обмотку (для получения дополнительной информации смотрите раздел о рассеивании мощности). Ниже приведены ключевые особенности драйвера:
Этот драйвер позволит управлять биполярным шаговым двигателем с выходным током до 2 А на обмотку (для получения дополнительной информации смотрите раздел о рассеивании мощности). Ниже приведены ключевые особенности драйвера:
- Простой интерфейс управления шагом и направлением вращения электродвигателя
- Пять различных разрешений перемещения: полный шаг, 1/2-шага, 1/4-шага, 1/8-шага, 1/16-шага
- Регулируемый контроль тока с помощью потенциометра, позволит установить максимальный выходной ток. Это даст вам возможность использовать напряжение выше допустимого диапазона для достижения более высокой угловой скорости шага двигателя
- Интеллектуальное управление автоматически выбирает режим регулировки затухания тока (медленный и быстрый режимы)
- Защитное отключение при перегреве и перегрузке по току, а также блокировка питания при пониженном напряжении
- Защита от короткого замыкания на землю, защита от замыкания в нагрузке
Обратите внимание, что Pololu производит несколько драйверов шаговых двигателей, которые могут быть использованы в качестве альтернативы этого модуля.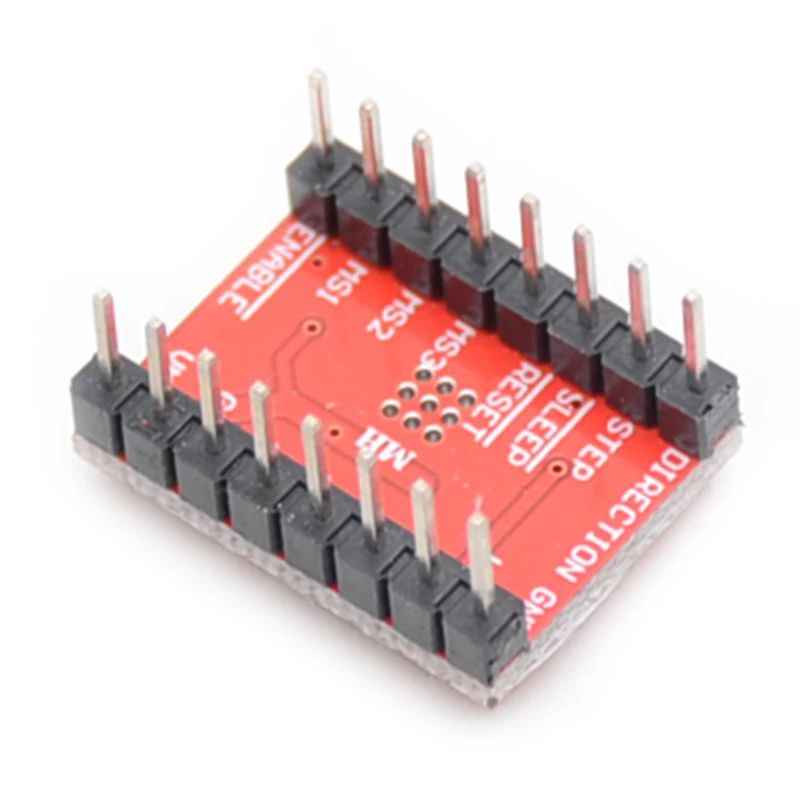 У драйвера шагового двигателя Pololu A4988 Black Edition производительность на 20% выше, и за исключением тепловых характеристик, Black Edition, и данная (зеленая) плата являются взаимозаменяемыми. Есть также большая версия драйвера Pololu на A4988, которая имеет защиту от обратной мощности на главном входе питания, а также встроенной 5 В и 3,3 В стабилизаторы напряжения, которые устраняют необходимость в покупке отдельного питания для логики и двигателей. Платы Pololu на DRV8825 предлагают на около 50% более высокую производительность в более широком диапазоне напряжений и с несколькими дополнительными функциями, в то время как платы на DRV8834 работают с двигателями с напряжением питания от 2,5 В; любую из этих плат можно использовать в качестве альтернативы этого драйвера во многих приложениях.
У драйвера шагового двигателя Pololu A4988 Black Edition производительность на 20% выше, и за исключением тепловых характеристик, Black Edition, и данная (зеленая) плата являются взаимозаменяемыми. Есть также большая версия драйвера Pololu на A4988, которая имеет защиту от обратной мощности на главном входе питания, а также встроенной 5 В и 3,3 В стабилизаторы напряжения, которые устраняют необходимость в покупке отдельного питания для логики и двигателей. Платы Pololu на DRV8825 предлагают на около 50% более высокую производительность в более широком диапазоне напряжений и с несколькими дополнительными функциями, в то время как платы на DRV8834 работают с двигателями с напряжением питания от 2,5 В; любую из этих плат можно использовать в качестве альтернативы этого драйвера во многих приложениях.
Использование:
Соединение с источником питания:
Для работы с драйвером необходимо питание логического уровня (3 — 5,5 В), подаваемое на выводы VDD и GND, а также питание двигателя (8 — 35 В) на выводы VMOT и GND. Чтобы обеспечить необходимый потребляемый ток (при пиковых до 4 А), необходимо поставить конденсаторы для гальванической развязки как можно ближе к плате.
Чтобы обеспечить необходимый потребляемый ток (при пиковых до 4 А), необходимо поставить конденсаторы для гальванической развязки как можно ближе к плате.
|
Внимание: В плате используются керамические конденсаторы с низким эквивалентным последовательным сопротивлением, что делает её уязвимой для индуктивно-ёмкостных скачков напряжения, особенно если питающие провода длиннее нескольких сантиметров. В некоторых случаях, эти скачки могут превысить максимально допустимое значение (35 В для A4988) и повредить плату. Одним из способов защиты платы от подобных скачков является установка большого (не меньше 47 мкФ) электролитического конденсатора между выводом питания (VMOT) и землёй близко к плате.
|
Соединение двигателя:
При правильном подключении, через Pololu A4988 можно управлять четырёх-, шести- и восьми- проводными шаговыми двигателями
|
Внимание: Соединение или разъединение шагового двигателя при включённом драйвере может привести к поломке двигателя.
|

Размер шага (и микрошага):
У шаговых двигателей обычно установлена конкретная величина (например 1,8° или 200 шагов на оборот), при которой достигается полный оборот в 360°. Микрошаговый драйвер, такой как A4988 позволяет увеличить разрешение за счёт возможности управления промежуточными шагами. Это достигается путём возбуждения обмоток средней величины тока. Например, управление мотором в режиме четверти шага даст двигателю с величиной 200-шагов-за-оборот уже 800 микрошагов при использовании разных уровней тока.
Разрешение (размер шага) задаётся комбинациями переключателей на входах (MS1, MS2, и MS3). С их помощью можно выбрать пять различных шагов, в соответствии с таблицей ниже. На входы MS1 и MS3 переключателя установлены 100 кОм подтягивающие на землю резисторы, а на MS2 — 50 кОм, и если оставить их не подключёнными, двигатель будет работать в полношаговом режиме. Для правильной работы в режиме микрошага необходим слабый ток (см. ниже), который обеспечивается ограничителями по току. В противном случае, промежуточные уровни будут некорректно восприниматься, и двигатель будет пропускать микрошаги.
ниже), который обеспечивается ограничителями по току. В противном случае, промежуточные уровни будут некорректно восприниматься, и двигатель будет пропускать микрошаги.
|
MS1
|
MS2
|
MS3
|
Разрешение микрошага
|
|
Низкий
|
Низкий
|
Низкий
|
Полный шаг
|
|
Высокий
|
Низкий
|
Низкий
|
1/2 шага
|
|
Низкий
|
Высокий
|
Низкий
|
1/4 шага
|
|
Высокий
|
Высокий
|
Низкий
|
1/8 шага
|
|
Высокий
|
Высокий
|
Высокий
|
1/16 шага
|
Входы управления:
Каждый импульс на входе STEP соответствует одному микрошагу двигателя, направление вращения которого зависит от сигнала на выводе DIR. Обратите внимание, что выводы STEP и DIR не подтянуты к какому-либо конкретному внутреннему напряжению, поэтому вы не должны оставлять эти выводы плавающими при создании приложений. Если вы просто хотите вращать двигатель в одном направлении, вы можете соединить DIR непосредственно с VCC или GND. Чип имеет три различных входа для управления состоянием питания: RST, SLP и EN. Дополнительные сведения об этих состояниях см. в техническом описании. Обратите внимание, что вывод RST плавает; если вы его не используете, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы подать на него высокий уровень и включить плату.
Обратите внимание, что выводы STEP и DIR не подтянуты к какому-либо конкретному внутреннему напряжению, поэтому вы не должны оставлять эти выводы плавающими при создании приложений. Если вы просто хотите вращать двигатель в одном направлении, вы можете соединить DIR непосредственно с VCC или GND. Чип имеет три различных входа для управления состоянием питания: RST, SLP и EN. Дополнительные сведения об этих состояниях см. в техническом описании. Обратите внимание, что вывод RST плавает; если вы его не используете, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы подать на него высокий уровень и включить плату.
| ePN Cashback — сервис, который возвращает часть денег с покупок, сделанных в интернет магазинах, представленных в ePN Cashback |
Ограничение тока:
Для достижения высокой скорости шага, питания двигателя, как правило, гораздо выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный ток 1 А с 5 Ом; сопротивлением обмотки, отсюда максимально допустимое питание двигателя равно 5 В (U=I*R). Использование же такого двигателя с питанием 12 В позволит повысить скорость шага. Однако чтобы предотвратить повреждение двигателя, необходимо ограничить ток до уровня ниже 1 А.
Например, типичный шаговый двигатель может иметь максимальный ток 1 А с 5 Ом; сопротивлением обмотки, отсюда максимально допустимое питание двигателя равно 5 В (U=I*R). Использование же такого двигателя с питанием 12 В позволит повысить скорость шага. Однако чтобы предотвратить повреждение двигателя, необходимо ограничить ток до уровня ниже 1 А.
Pololu A4988 поддерживает активное ограничение тока, которое можно установить подстроечным потенциометром на плате. Один из способов установить предельный ток — подключить драйвер в полношаговый режим и измерять ток, протекающий через одну обмотку двигателя без синхронизации по входу STEP. Измеренный ток будет равен 0,7 части предельного тока (так как обе обмотки всегда ограничиваются примерно на 70% от текущей настройки предельного тока в полношаговом режиме). Учтите, что при изменении логического напряжения Vdd, на другое значение, изменит предельный ток, поскольку напряжение на выводе «ref» является функцией Vdd.
Еще один способ установить предельный ток – измерить напряжение на выводе «ref» и вычислить полученное ограничение тока (резисторы SENSE равны 0,05 Ом). Напряжение вывода доступно через металлизированное сквозное отверстие (в кружке на шёлкографии печатной платы). Ограничение тока относится к опорному напряжению следующим образом:
Напряжение вывода доступно через металлизированное сквозное отверстие (в кружке на шёлкографии печатной платы). Ограничение тока относится к опорному напряжению следующим образом:
Current Limit = VREF × 2,5
Например: опорное напряжение равно 0,3 В, предельный ток 0,75 А. Как упоминалось выше, в режиме полного шага, ток через катушки ограничен 70% от текущего предела, поэтому, чтобы получить полный шаг тока катушки в 1 А, текущий предел должен быть 1 A / 0,7 = 1,4 А, что соответствует VREF 1,4 A / 2,5 = 0,56 В. Смотрите спецификацию A4988 для получения дополнительных сведений.
|
Примечание: Ток обмотки может сильно отличаться от тока источника питания, поэтому не следует измерять ток на источнике питания, чтобы установить ограничение тока. Подходящим местом для измерения тока является одна из обмоток вашего шагового двигателя.
|
Рекомендации по рассеиванию мощности:
Максимально допустимый ток подаваемый на обмотку, у микросхемы A4988 равен 2 A.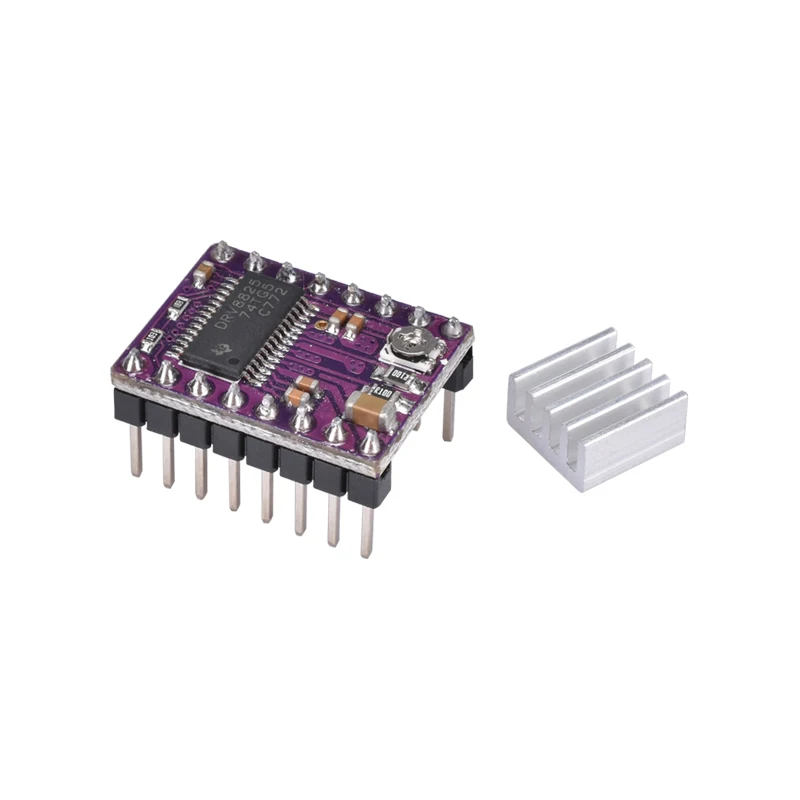 Фактический ток, который можно подать на плату, зависит от качества охлаждения микросхемы. Плата разработана с учётом отвода тепла от микросхемы, но при токе выше 1 A на обмотку необходим теплоотвод или другое дополнительное охлаждение.
Фактический ток, который можно подать на плату, зависит от качества охлаждения микросхемы. Плата разработана с учётом отвода тепла от микросхемы, но при токе выше 1 A на обмотку необходим теплоотвод или другое дополнительное охлаждение.
|
Эта плата может нагреться так, что можно получить ожог, задолго до того как перегреется сама микросхема. Будьте осторожны при обращении с платой и со всеми подключёнными к ней устройствами.
|
Обратите внимание, что ток, измеренный на источнике питания, как правило, не соответствует величине тока на обмотке. Так как напряжение, подаваемое на драйвер, может быть значительно выше напряжения на обмотке, то, соответственно, измеряемый ток на источнике питания может быть немного ниже, чем ток на обмотке (драйвер и обмотка в основном работают в качестве переключаемого источника с пошаговым понижением питания). Кроме того, если напряжение питания намного выше необходимого двигателю уровня для достижения требуемого тока, то скважность будет очень низкой, что также приводит к существенным различиям между средним и RMS током (среднеквадратичное значение переменного тока).
- Sketch code
Shield
Module
Модуль Драйвер A4988 шагового двигателя для 3D принтера с радиатором
JavaScript seems to be disabled in your browser.
You must have JavaScript enabled in your browser to utilize the functionality of this website.
Proceed to Checkout
Итоговая цена
0,00 A$
Корзина
0
Хотите бесплатную доставку? кликните сюда Узнать больше!
{{/findAutocomplete}}
SKU:
{{sku}}
{{#isFreeshipppingEnabled}}
Бесплатная доставка подходящих заказов
{{/isFreeshipppingEnabled}}
{{#isDiscountFlag1Enabled}}
{{/isDiscountFlag1Enabled}}
{{#isDiscountFlag2Enabled}}
{{/isDiscountFlag2Enabled}}
{{#isDiscountFlag3Enabled}}
{{/isDiscountFlag3Enabled}}
{{#isDiscountFlag4Enabled}}
{{/isDiscountFlag4Enabled}}
{{#isDiscountFlag5Enabled}}
{{/isDiscountFlag5Enabled}}
{{#isDiscountFlag6Enabled}}
{{/isDiscountFlag6Enabled}}
{{#isDiscountFlag7Enabled}}
{{/isDiscountFlag7Enabled}}
{{#isDiscountFlag8Enabled}}
{{/isDiscountFlag8Enabled}}
{{#isDiscountFlag9Enabled}}
{{/isDiscountFlag9Enabled}}
{{#list_image_url}}{{/list_image_url}}
{{^list_image_url}}{{/list_image_url}}
{{#isFreeshipppingEnabled}}
Бесплатная доставка подходящих заказов
{{/isFreeshipppingEnabled}}
{{#isAddToCartEnabled}}
{{#isWarehouseAddToCartEnabled}}
{{^is_combo_product}}
Количество:
{{#isAgerestrictionEnabled}}
{{/isAgerestrictionEnabled}}
{{^isAgerestrictionEnabled}}
{{/isAgerestrictionEnabled}}
{{/is_combo_product}}
{{/isWarehouseAddToCartEnabled}}
{{/isAddToCartEnabled}}
{{#availableInOtherWarehouses}}
{{{availableInOtherWarehouses}}}
{{/availableInOtherWarehouses}}
{{#is_combo_product}}
{{^isProhibited}}
Подробнее
{{/isProhibited}}
{{/is_combo_product}}
{{#isProhibited}}
We are sorry, this product is not available in your country
{{/isProhibited}}
{{#hbk_price.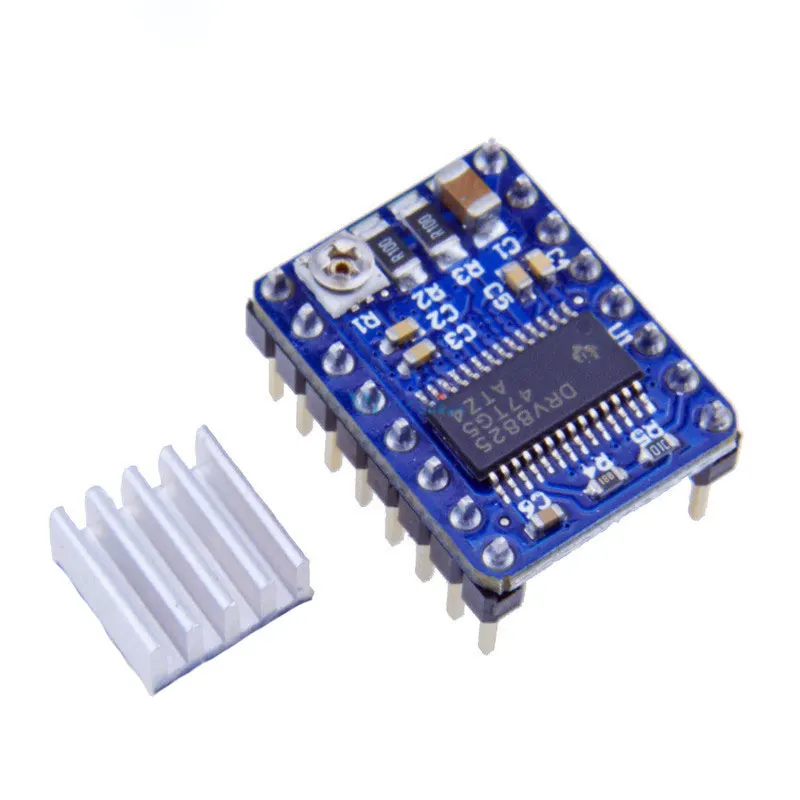 stock_2_group_0_original_formated}}
stock_2_group_0_original_formated}}
{{hbk_price.stock_2_group_0_original_formated_label}}
{{hbk_price.stock_2_group_0_original_formated}}
{{/hbk_price.stock_2_group_0_original_formated}}
{{#is_combo_product}}
{{hbk_price.stock_2_group_0_combo_price_label}}
{{/is_combo_product}}
{{hbk_price.stock_2_group_0_formated}}
{{#hbk_price.stock_2_group_0_original_formated}}
{{hbk_price.stock_2_group_0_you_save_formated_label}}
{{hbk_price.stock_2_group_0_you_save_formated}}
{{/hbk_price.stock_2_group_0_original_formated}}
Как подключить драйвер шагового двигателя к контроллеру
Содержание
- Обзор драйвера шагового двигателя DRV8825
- Технические параметры
- Общие сведения о драйвере DRV8825
- Подключение драйвера шагового двигателя DRV8825 к Arduino UNO
- самодельный станок чпу
- Сайт поможет вам в изготовлении своего станка чпу
- Рекомендации по работе с драйверами шаговых двигателей
- Типы шаговых двигателей
- Особенности шаговых двигателей
- Система управления шаговым двигателем
- Драйверы шаговых двигателей
- Особенности и функции драйверов шаговых двигателей
- Дополнительные функции контроллеров шаговых двигателей
- Драйверы шаговых двигателей A4988 и DVR8825
- Видео
Обзор драйвера шагового двигателя DRV8825
Автор: Сергей · Опубликовано 22. 04.2019 · Обновлено 13.04.2020
04.2019 · Обновлено 13.04.2020
В предыдущей статье рассказывало о драйвере для биполярного шагового двигателя A4988, который часто используют в проектировании станков ЧПУ. В этой статье расскажу о другом драйвере DRV8825, который полностью взаимозаменяемый с драйвером A4988 и может работать с микрошагом до 1/32, напряжением до 45 В и током до 2.5 А.
Технические параметры
► Напряжения питания: от 8,2 до 45 В
► Установка шага: 1, 1/2, 1/4, 1/8, 1/16, 1/32
► Напряжение логики: 3.3 В
► Защита от перегрева: Есть
► Максимальный ток на фазу: 1.5 А без радиатора, 2.5 А с радиатором.
► Габариты модуля: 20 мм х 15 мм х 10 мм
► Габариты радиатора: 9 мм х 5 мм х 9 мм
Общие сведения о драйвере DRV8825
Основная микросхема модуля это драйвер от TI (Texas Instruments Inc.) DRV8825, которая способна управлять одним биполярным шаговым двигателем. Как говорил ранее данный драйвер полностью взаимозаменяемый с драйвером A4988. Микросхема DRV8825 может работать с выходным напряжение до 45 В и током до 1.5 на катушку без радиатора и до 2.5 А с радиатором (дополнительным охлаждением). Так же, модуль имеет внутренний стабилизатор напряжение, который напитывает логическую часть модуля напряжение 3.3 В от источника шагового питания двигателя.
Микросхема DRV8825 может работать с выходным напряжение до 45 В и током до 1.5 на катушку без радиатора и до 2.5 А с радиатором (дополнительным охлаждением). Так же, модуль имеет внутренний стабилизатор напряжение, который напитывает логическую часть модуля напряжение 3.3 В от источника шагового питания двигателя.
Драйвер позволяет использовать шесть вариантов шага: 1, 1/2, 1/4, 1/8, 1/16, 1/32
Распиновка драйвера DRV8825:
На драйвере DRV8825 расположено 16 контактов, назначение каждого можно посмотреть ниже:
► EN — включение и выключение модуля (0 — включен, 5 В — выключен).
► M0, M1 и M2 — выбор режима микро шаг (смотрите таблицу ниже).
► RST — сброс драйвера.
► SLP — вывод включения спящего режима, если подтянуть его к низкому состоянию драйвер перейдет в спящий режим.
► STEP — управляющий вывод, при каждом положительном импульсе, двигатель делает шаг (в зависимости от настройки микро шага), чем быстрее импульсы, тем быстрее вращаться двигатель.
► DIR — управляющий вывод, если подать +5 В двигатель будет вращается по часовой стрелке, а если подать 0 В против часовой стрелки.
► VMOT & GND MOT — питание шагового двигателя двигателя от 8.2 до 45 В (обязательное наличие конденсатора на 100 мкФ). Так же, нет необходим
► B2, B1, A1, и A2 — подключение обмоток двигателя.
► FAULT — Выход включения защиты, если состояние «0», значит полевые транзисторы H-моста отключены в результате защиты от перегрузки по току или был перегрев.
► GND LOGIC — заземление микроконтроллера.
Настройка микрошага
Драйвер DRV8825 может работать микрошаговом режиме, то есть может подавать питание на катушки с промежуточным уровням. Например, если взять двигатель NEMA17 с шагом 1.8 или 200 оборотов, в режиме 1/4, двигатель будет выдавать 800 шагов за оборот
Дня настройки микрошагов на драйвере DRV предусмотрены три выхода, а именно M0, M1 и M2. Установив соответствующие логические уровни для этих выводов, можно выбрать режим микрошага.
Установив соответствующие логические уровни для этих выводов, можно выбрать режим микрошага.
Вывода M0, M1 и M2 в микросхеме DRV8825 подтянуты резистором к земле, поэтому, если не подключать их, двигатель будет работать в режиме полного шага.
Система охлаждения DRV8825
При интенсивной работе микросхемы DRV8825 начинает сильно греется и если температура превысит придельные значение, может сгореть. По документации DRV8825 может работать с током до 2.5 А на катушку, но на практике микросхема не греется если ток не превышает 1.2 А на катушку. Поэтому если ток выше 1.2 А необходимо устанавливать радиатор охлаждения, который идет в комплекте.
Настройка тока DRV8825
Перед использованием мотора нужно сделать небольшую настройку, необходимо ограничить максимальную величину тока, протекающего через катушки шагового двигателя и ограничить его превышение номинального тока двигателя, регулировка осуществляется с помощью небольшого потенциометра.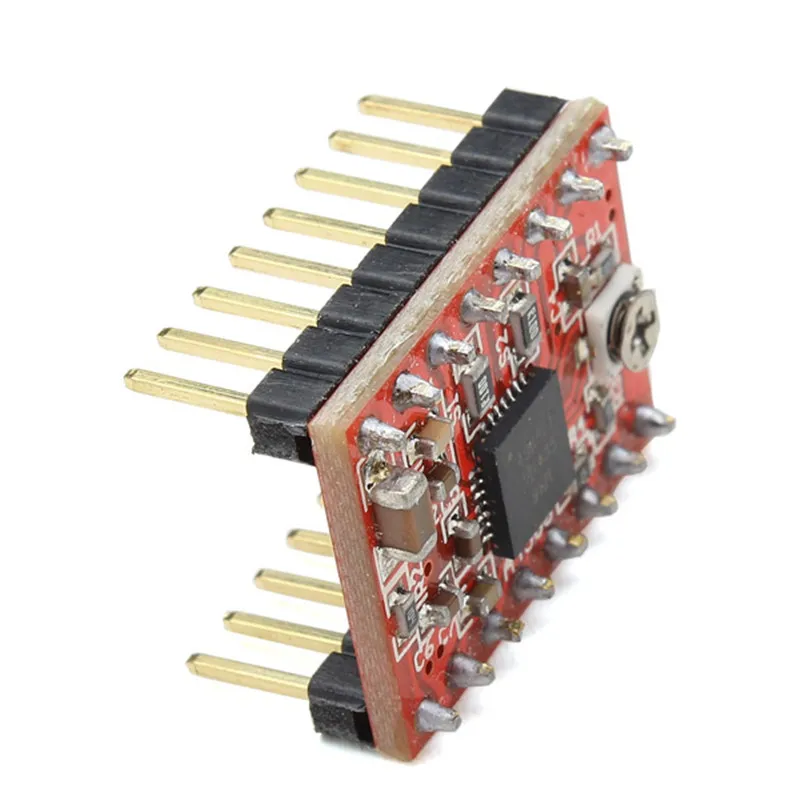
Для настройки необходимо рассчитать значение напряжения Vref.
Vref = Current Limit / 2
где,
Current Limit — номинальный ток двигателя
В моем случаи, номинальный ток двигателя 17HS4401 равняется 1,7 А.
Vref = 1,7 / 2 = 0,85 В
Осталось только настроить, берем отвертку и вольтметр, плюсовой шуп вольтметра устанавливаем на потенциометр, а шуп заземления на вывод GND и выставляем нужное значение.
Подключение драйвера шагового двигателя DRV8825 к Arduino UNO
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Драйвер шагового двигателя DRV8825 x 1 шт.
► Шаговый двигатель 17HS4401 x 1 шт.
► Комплект проводов DuPont 2.54 мм, 20 см x 1 шт.
Подключение:
Теперь, можно приступить к сборке схемы. Первым делом подключаем GND LOGIC к GND на Arduino. Контакты DIR и STEP подключим к цифровым контактам 2 и 3 на Arduino. Подключение шагового двигатель к контактам B2, B1, A2 и A1.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению.
Затем необходимо подключить контакт RST к соседнему контакту SLP к 5В на Arduino, чтобы включить драйвер. Так-же контакты выбора микрошага необходимо оставить не подключенными, чтобы работал режим полный микрошаг. Теперь осталось подключить питание двигателя к контактам VMOT и GND MOT, главное не забудьте подключить электролитический конденсатор на 100 мкФ, в противном случаи при скачке напряжение, модуль может выйти из строя.
Программа:
Теперь можно приступки к программной части и начать управлять шаговым двигателем с помощью драйвера DRV8825, загружайте данный скетч в Arduino.
Источник
самодельный станок чпу
Сайт поможет вам в изготовлении своего станка чпу
Рекомендации по работе с драйверами шаговых двигателей
Вот основные положения, которые желательно соблюдать при работе с драйверами ШД:
1. Драйверы шаговых двигателей ни в коем случае нельзя подключать к источнику переменного тока. Безопасно запитать драйвер можно лишь с помощью выпрямленного постоянного напряжения.
Драйверы шаговых двигателей ни в коем случае нельзя подключать к источнику переменного тока. Безопасно запитать драйвер можно лишь с помощью выпрямленного постоянного напряжения.
2. При работе с шаговыми двигателями нужно внимательно соблюдать полярность подключения управляющих сигналов и силового питания. Несмотря на то, что современные контроллеры шаговых двигателей оснащены системой защиты от переполюсовки, лишняя осторожность в этом деле никогда не повредит.
3. Нельзя подключать драйвер шагового двигателя к серводвигателю или ШД к серводрайверу.
4. Обязательно нужно отключать питание перед тем, как осуществлять подключение драйвера или менять режим его работы.
5. Выключатель (размыкатель) питания можно устанавливать на линии драйвера только до блока питания, со стороны источника 220В. Установка размыкателя после БП строго запрещена.
6. Недопустимо соединять контакт «-» на источнике питания с массой, корпусом, заземлением итд.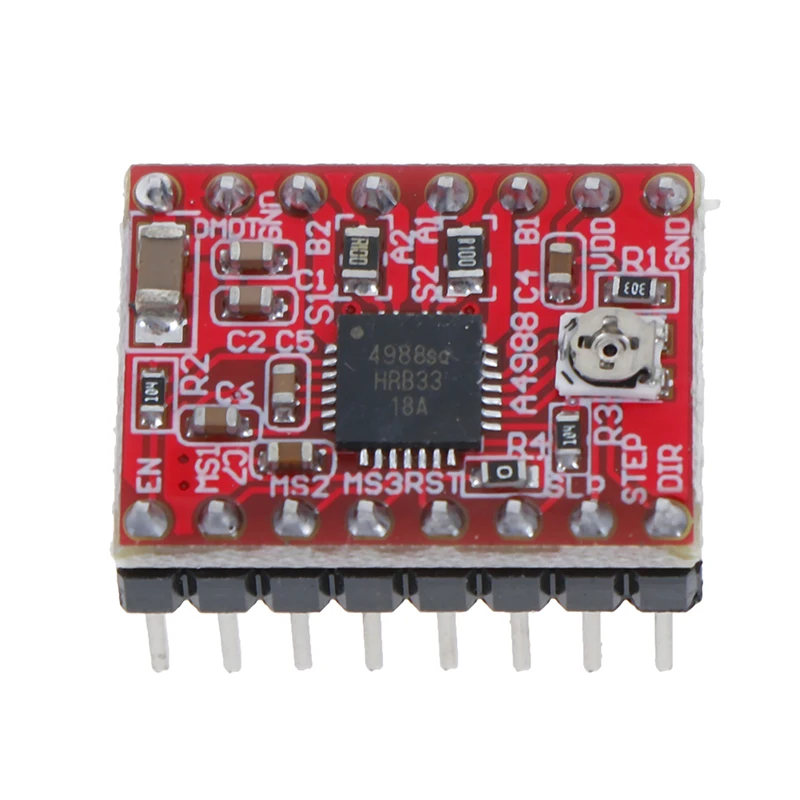
7. Драйверы нельзя подключать последовательно по питанию, правильным считается только подключение типа «звезда» (то есть, к блоку питания подсоединяется отдельная линия для каждого драйвера).
8. Напряжение питания не должно превышать максимальные показатели, которые указаны в технических характеристиках конкретного драйвера.
9. Также нельзя подключать драйверы шагового двигателя ко включенному источнику питания или же отключать их от него. Сначала вы должны выполнить все соединения, а потом только включать питание (размыкатель обязательно должен быть установлен со стороны сети).
10. Допускается подключение лишь одного ШД к одного драйверу. Управление одного двигателя несколькими драйверами запрещено. Кроме того, нельзя подключать два драйвера к униполярному шаговому двигателю (даже в том случае, когда один драйвер коммутирует одну пару обмоток, а второй – другую).
11. Отдельное внимание желательно уделить системе охлаждения драйверов (отводу тепла), а также нужно тщательно следить за тем, чтобы контроллеры шаговых двигателей не контактировали с влагой.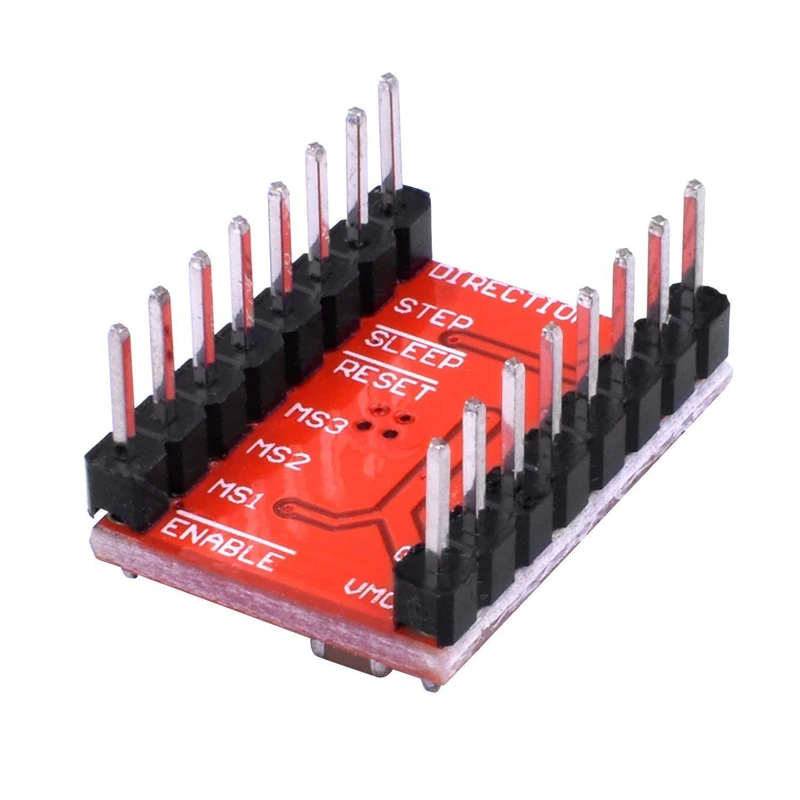
12. Рекомендуется монтировать драйверы шаговых двигателей в защищенный электротехнический шкаф. Это позволит обеспечить надежность их работы и безопасность для людей, работающих с данным оборудованием.
Типы шаговых двигателей
Особенности шаговых двигателей
На сегодняшний день существует достаточно большое количество различных двигателей – систем управления механизмами. Одним из наиболее передовых и эффективных их видов по праву считаются шаговые двигатели. В данной статье мы рассмотрим основные особенности строения этой техники, а также расскажем вам о ее существующих разновидностях. Как известно, ШД представляет собой синхронный двигатель, в роторе которого расположены постоянные магниты, а основные направляющие (магнитное поле статора), вращается с помощью электроники.
В ходе своей работы, шаговый двигатель трансформирует управляющие импульсы (шаги) в механическое движение (вращение) ротора. ШД обладают целым рядом преимуществ, по сравнению с другими типами подобного оборудования. Сюда можно отнести их простую и понятную конструкцию, высокую надежность и долговечность, доступную цену, а также высокие показатели крутящего момента при низких скоростях. Однако данная техника также обладает и определенными недостатками – в частности, сюда относится эффект резонанса при низких скоростях и снижение крутящего момента на высоких. Впрочем, современные драйверы шаговых двигателей способны существенно снизить эффект от перечисленных недостатков.
ШД обладают целым рядом преимуществ, по сравнению с другими типами подобного оборудования. Сюда можно отнести их простую и понятную конструкцию, высокую надежность и долговечность, доступную цену, а также высокие показатели крутящего момента при низких скоростях. Однако данная техника также обладает и определенными недостатками – в частности, сюда относится эффект резонанса при низких скоростях и снижение крутящего момента на высоких. Впрочем, современные драйверы шаговых двигателей способны существенно снизить эффект от перечисленных недостатков.
Система управления шаговым двигателем
Indexer – контроллеры шаговых двигателей, представлены в виде микропроцессора, который генерирует импульсы «НАПРАВЛЕНИЕ» и «ШАГ», в соответствии с сигналами, которые он получает от пользователя. Помимо этого, контроллеры также выполняют и другие, более сложные функции. Силовой частью ШД является его драйвер – он преобразовывает сигналы от контроллера в силовые импульсы, которые необходимы для движения ротора. Современный рынок шаговых двигателей предлагает покупателям весьма большой выбор драйверов к ним. Для каждой модели драйвера характерны определенная величина тока и формы импульсов. Драйверы шаговых двигателей не являются универсальными, каждый из них совместим лишь с конкретной моделью ШД. Если вы собираетесь приобрести надежный и долговечный двигатель, то крайне важным решением будет подбор драйвера к нему.
Современный рынок шаговых двигателей предлагает покупателям весьма большой выбор драйверов к ним. Для каждой модели драйвера характерны определенная величина тока и формы импульсов. Драйверы шаговых двигателей не являются универсальными, каждый из них совместим лишь с конкретной моделью ШД. Если вы собираетесь приобрести надежный и долговечный двигатель, то крайне важным решением будет подбор драйвера к нему.
Современные шаговые двигатели делятся на 3 основные типа:
• Двигатели с переменным магнитным сопротивлением
• Двигатели с постоянными магнитами
• Гибридные двигатели
Каждый из этих разновидностей имеет особое строение и механизм работы. Например, постоянные магниты нельзя использовать в двигателях с переменным сопротивлением. В результате у таких моделей ШД отсутствует функция стопорного момента (detent torque). Из-за этого двигатели с переменным магнитным сопротивлением, в большинстве случаев, не могут достигнуть высоких показателей крутящего момента.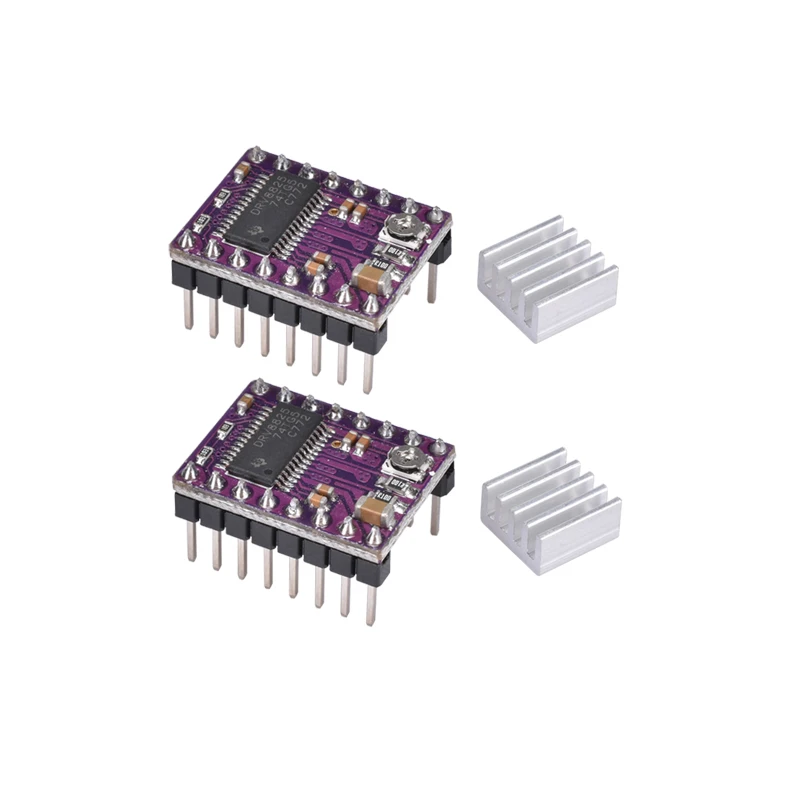 Что же касается двигателей с постоянными магнитами, то их величина шага довольно велика – не менее 7.5°. Эта характеристики связана с особенностями конструкции ротора данных ШД. Кроме того, такие двигатели обладают достаточно низкой ценой, однако скорость их вращения оставляет желать лучшего.
Что же касается двигателей с постоянными магнитами, то их величина шага довольно велика – не менее 7.5°. Эта характеристики связана с особенностями конструкции ротора данных ШД. Кроме того, такие двигатели обладают достаточно низкой ценой, однако скорость их вращения оставляет желать лучшего.
Гибридные же шаговые двигатели обладают ротором с постоянными магнитами и многополюсным статором. Благодаря этому, такие модели ШД демонстрируют умеренную величину шага (около 1,8°) и достойные показатели крутящего момента (до 300 кгс/см). Стопорный момент у такого оборудования равняется примерно 10%, от показателей синхронизирующего статического момента.
Кроме того, шаговые двигатели отличаются друг от друга по способу питания. Здесь существуют:
• Униполярные двигатели
• Биполярные двигатели
Шаговый двигатель является униполярным в том случае, когда отводы от середины обмоток объединены между собой внутри самого двигателя. Таким образом, пользователю доступно только 5 выводов, что бывает крайне редко.
Таким образом, пользователю доступно только 5 выводов, что бывает крайне редко.
Драйверы шаговых двигателей
Особенности и функции драйверов шаговых двигателей
Драйвер (контроллер) шагового двигателя представляет собой устройство-набор микросхем, которое обеспечивает его правильную работу и заставляет двигатель четко выполнять сигналы управления. В сфере управления ШД существуют определенные стандарты – это сигналы STEP, DIR и ENABLE. Сигнал STEP отвечает за шаг двигателя, DIR – за направление вращения, а ENABLE является сигналом включения самого драйвера. Говоря научным языком, контроллеры шаговых двигателей – это силовые электронные устройства, управляющие высоковольтными/сильноточными обмотками шагового двигателя на основе цифровых сигналов управления. С их помощью двигатель выполняет свою непосредственную функцию – делает шаги (то есть, вращается).
Как известно, шаговые двигатели имеют более сложную структуру и систему управления, по сравнению с теми же обычными коллекторными двигателями. Чтобы эффективно управлять ими, нужно переключать уровень напряжения в обмотках в определенной последовательности и одновременно поддерживать контроль тока. Поэтому, чтобы упростить обслуживание данных механизмов, были внедрены вспомогательные устройства управления – драйверы шаговых двигателей. Они позволяют контролировать вращения ротора двигателя, в зависимости от сигналов управления и в после этого делить физический шаг шагового двигателя на мелкие дискреты с помощью электроники.
Для того, чтобы обеспечить полноценную работу устройства, к контроллерам шагового двигателя подключаются сигналы управления, сам ШД через обмотки, а также источник питания. Стандартные сигналы управления для такого оборудования – это сигналы STEP\DIR (или же CW\CCW), а также сигнал ENABLE.
Протокол STEP\DIR
Сигнал STEP – основной сигнал шага, тактирующий. Один его импульс поворачивает ротор двигателя на один шаг. Важно, что здесь имеется в виду не физический шаг шагового двигателя, а специальный шаг, параметры которого определяются драйвером (например, 1:1, 1:8, 1:16). Как правило, драйверы шаговых двигателей отрабатывают этот шаг по заднему или же переднему фронту импульса.
Сигнал DIR – сигнал направления, потенциальный сигнал. В режиме логической единице шаговый двигатель вращается по часовой стрелке, а в режиме нуля – против нее. Также можно выставить значения этих параметров в обратной последовательности. Есть возможность инвертировать сигнал DIR из программы управления или же изменить последовательность подключения фаз двигателя с помощью драйвера (в разъеме его подключения).
Протокол CW/CWW
Сигнал CW – сигнал шага, тактирующий сигнал. Его импульс также поворачивает ротор. Один сигнал – один шаг ротора, коэффициенты которого устанавливаются драйвером (1:1, 1:16, 1:8 итд). Шаг отрабатывается драйвером по переднему или заднему фронту импульса.
Сигнал ENABLE – сигнал включения/выключения драйвера, потенциальный сигнал. При логической единице (5В на вход) драйвер выключается, и обмотки шагового двигателя обесточиваются. При нуле (0В на вход) драйвер включен и обмотки запитаны.
При нуле (0В на вход) драйвер включен и обмотки запитаны.
Дополнительные функции контроллеров шаговых двигателей
• Контроль перегрузок по току
• Контроль напряжения в питании, в том числе и защита от эффекта обратной ЭДС. Если вращение ротора замедляется, шаговый двигатель начинает вырабатывать дополнительное напряжение, которое суммируется с напряжением питания и на краткий период времени увеличивает его. Чем сильнее замедление, тем больше растет напряжение обратной ЭДС, и тем больше скачет напряжение питания. Такой скачок напряжения негативно влияет на драйвер и может даже вывести его из строя, поэтому драйверы шаговых двигателей оснащены системой защиты от колебаний питающего напряжения. Если показатели напряжения превышают пороговое значение, драйвер автоматически отключается.
• Контроль изменения полюсов (переполюсовки) при подключении питающего напряжения и сигналов управления.
• Режим экономии электрического тока, подаваемого на обмотки ШД при его простое (определяется отсутствием сигнала STEP). Он позволяет уменьшить нагрев двигателя и снизить расход потребляемого тока (в режиме AUTO-SLEEP).
Он позволяет уменьшить нагрев двигателя и снизить расход потребляемого тока (в режиме AUTO-SLEEP).
• Автоматическая система-компенсатор среднечастотного резонанса шагового двигателя. Резонанс часто возникает при работе ШД (в диапазоне 6-12 об/сек.) и негативно влияет на его работу. В частности, двигатель начинает гудеть, работать нестабильно и в итоге ротор останавливается. Это явление во многом зависит от механической нагрузки и параметров шагового двигателя. Автоматический компенсатор помогает полностью устранить явление резонанса, сделать вращение его ротора устойчивым и равномерным при любых диапазонах частот.
• Схема изменений формы фазовых токов с функцией увеличения их частоты. Также она называется морфинг – то есть, переход от микрошага к обычному шагу двигателя при увеличении частоты тока. Как известно, максимальный момент (заявленный в ТХ) отдается двигателем лишь при режиме полного шага. Поэтому, обычные драйверы шаговых двигателей (без морфинга) позволяют двигателям работать лишь на 70% от их максимальной мощности.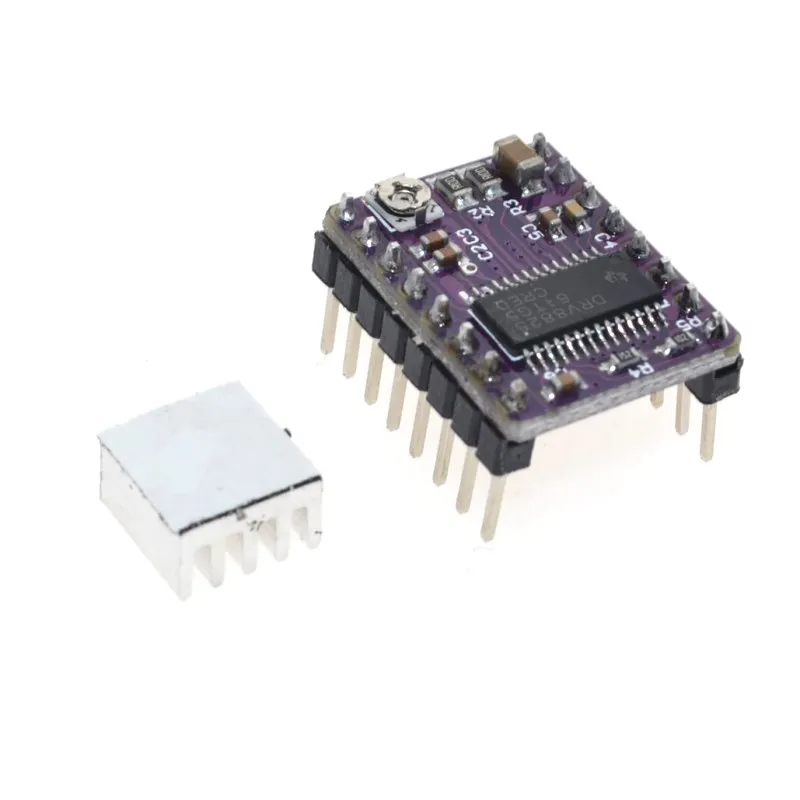 Драйвер с функцией морфинга обеспечивает максимальную отдачу двигателя во всех частотных диапазонах.
Драйвер с функцией морфинга обеспечивает максимальную отдачу двигателя во всех частотных диапазонах.
• Генератор частоты STEP (встроенный) – это функция, позволяющая осуществить пробный запуск контроллера шагового двигателя без необходимости подключения к ПК или какому-либо другому внешнему генератору. Также с его помощью можно устанавливать простые системы перемещения опять таки без использования компьютера.
Источник
Драйверы шаговых двигателей A4988 и DVR8825
В статье мы разберем режимы управления вращением шаговых двигателей. Подробно рассмотрим подключение драйвера A4988.
Шаговые моторы имеют три режима управления вращением: полношаговый, полушаговый и микрошаговый.
Функционирование специальных контроллеров управления (драйверов шаговых двигателей) происходит следующим образом: вначале напряжение питания поступает на шаговый двигатель, затем на логическую часть драйвера шаговика, после этого задается направление вращения и команда (ШАГ) по управляющим контактам на двигателе. Во время команды (ШАГ) шаговый мотор получает необходимое напряжение, которого достаточно для передвижения ротора на один микрошаг (полушаг или шаг) – это зависит от предварительных установок, заданных заранее специальными перемычками на RAMPS 1.4.
Зачастую у продаваемых контроллеров шаговых двигателей (например: RAMPS 1.4) предустановлен режим микрошага 1/16. Чтобы регулировать подаваемое на шаговый мотор напряжение питания, на котроллере RAMPS 1.4 установлен специальный переменный резистор. Он является важным элементом, поскольку шаговики могут быть под 8V, 4V, 12V и д.р.
Для платы RAMPS 1.4 выпускают два вида драйверов A4988 и DVR8825. Они отличаются током, выдаваемым на шаговый двигатель и минимальным микрошагом.
И не только. Выпускаются несколько других драйверов шаговых двигателей, которые могут быть использованы в качестве альтернативы. Например, у драйвера шагового двигателя Pololu A4988 Black Edition производительность на 20% выше. Есть также большая версия драйвера на A4988, которая имеет защиту от обратной мощности на главном входе питания, а также встроенной 5 В и 3. 3 В стабилизаторы напряжения, которые устраняют необходимость в покупке отдельного питания для логики и двигателей. Платы на DRV8825 предлагают на около 50% более высокую производительность в более широком диапазоне напряжений и с несколькими дополнительными функциями, в то время как платы на DRV8834 работают с двигателями с напряжением питания от 2.5 В. Любую из этих плат можно использовать в качестве драйвера во многих приложениях.
3 В стабилизаторы напряжения, которые устраняют необходимость в покупке отдельного питания для логики и двигателей. Платы на DRV8825 предлагают на около 50% более высокую производительность в более широком диапазоне напряжений и с несколькими дополнительными функциями, в то время как платы на DRV8834 работают с двигателями с напряжением питания от 2.5 В. Любую из этих плат можно использовать в качестве драйвера во многих приложениях.
Рассмотрим драйвер A4988.
Характеристики драйвера A4988
Установка микрошага производится перемычками установленными на RAMPS 1.4
Схема драйвера A4988
Подключение драйвера A4988
Внимание: В плате используются керамические конденсаторы с низким эквивалентным последовательным сопротивлением, что делает её уязвимой для индуктивно-ёмкостных скачков напряжения, особенно если питающие провода длиннее нескольких сантиметров. В некоторых случаях, эти скачки могут превысить максимально допустимое значение (35 В для A4988) и повредить плату. Одним из способов защиты платы от подобных скачков является установка большого (не меньше 47 мкФ) электролитического конденсатора между выводом питания (VMOT) и землёй близко к плате.
Одним из способов защиты платы от подобных скачков является установка большого (не меньше 47 мкФ) электролитического конденсатора между выводом питания (VMOT) и землёй близко к плате.
При правильном подключении, через Pololu A4988 можно управлять четырёх-, шести- и восьми- проводными шаговыми двигателями.
Внимание: Соединение или разъединение шагового двигателя при включённом драйвере может привести к поломке двигателя.
Установка микрошага
У шаговых двигателей обычно установлена конкретная величина (например 1,8° или 200 шагов на оборот), при которой достигается полный оборот в 360°. Микрошаговый драйвер, такой как A4988 позволяет увеличить разрешение за счёт возможности управления промежуточными шагами. Это достигается путём возбуждения обмоток средней величины тока. Например, управление мотором в режиме четверти шага даст двигателю с величиной 200-шагов-за-оборот уже 800 микрошагов при использовании разных уровней тока.
Обычно для домашних 3D принтеров и станков ЧПУ используются драйверы A4988 с микрошагом 1/16.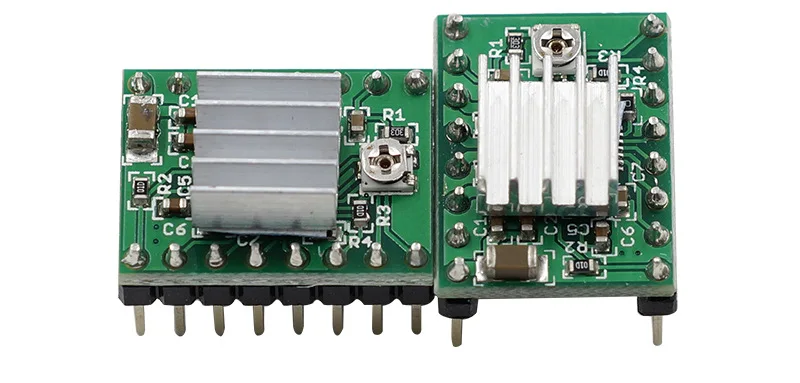 Для этого все перемычки на плате RAMPS 1.4 должны быть установлены на свои гнезда.
Для этого все перемычки на плате RAMPS 1.4 должны быть установлены на свои гнезда.
Входы управления
Каждый импульс на входе STEP соответствует одному микрошагу двигателя, направление вращения которого зависит от сигнала на выводе DIR. Обратите внимание, что выводы STEP и DIR не подтянуты к какому-либо конкретному внутреннему напряжению, поэтому вы не должны оставлять эти выводы плавающими при создании приложений. Если вы просто хотите вращать двигатель в одном направлении, вы можете соединить DIR непосредственно с VCC или GND. Чип имеет три различных входа для управления состоянием питания: RST, SLP и EN. Обратите внимание, что вывод RST плавает; если вы его не используете, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы подать на него высокий уровень и включить плату.
Ограничение тока
Для достижения высокой скорости шага, питания двигателя, как правило, гораздо выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный ток 1 А с 5 Ом; сопротивлением обмотки, отсюда максимально допустимое питание двигателя равно 5 В (U=I*R). Использование же такого двигателя с питанием 12 В позволит повысить скорость шага. Однако чтобы предотвратить повреждение двигателя, необходимо ограничить ток до уровня ниже 1 А.
Например, типичный шаговый двигатель может иметь максимальный ток 1 А с 5 Ом; сопротивлением обмотки, отсюда максимально допустимое питание двигателя равно 5 В (U=I*R). Использование же такого двигателя с питанием 12 В позволит повысить скорость шага. Однако чтобы предотвратить повреждение двигателя, необходимо ограничить ток до уровня ниже 1 А.
Драйвер A4988 поддерживает активное ограничение тока, которое можно установить подстроечным потенциометром на плате.
Еще один способ установить предельный ток – измерить напряжение на выводе «ref» и вычислить полученное ограничение тока (резисторы SENSE равны 0,05 Ом). Напряжение вывода доступно через металлизированное сквозное отверстие (в кружке на шёлкографии печатной платы). Ограничение тока относится к опорному напряжению следующим образом:
Current Limit = VREF × 2,5
Например: опорное напряжение равно 0,3 В, предельный ток 0,75 А. Как упоминалось выше, в режиме полного шага, ток через катушки ограничен 70% от текущего предела, поэтому, чтобы получить полный шаг тока катушки в 1 А, текущий предел должен быть 1 A / 0,7 = 1,4 А, что соответствует VREF 1,4 A / 2,5 = 0,56 В.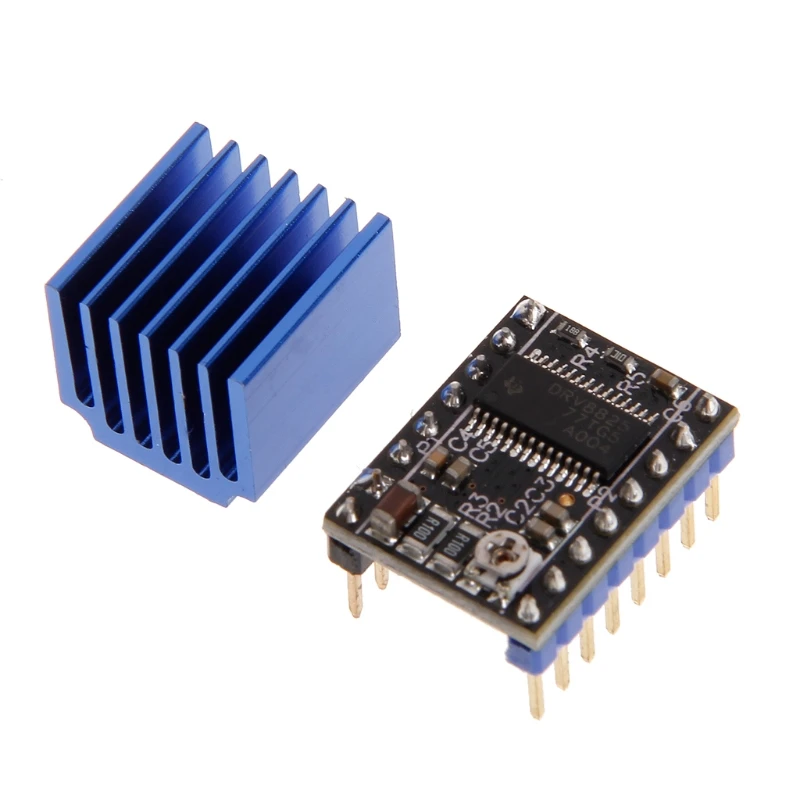 Смотрите спецификацию A4988 для получения дополнительных сведений.
Смотрите спецификацию A4988 для получения дополнительных сведений.
Примечание: Ток обмотки может сильно отличаться от тока источника питания, поэтому не следует измерять ток на источнике питания, чтобы установить ограничение тока. Подходящим местом для измерения тока является одна из обмоток вашего шагового двигателя.
Величину тока на драйвере шагового мотора настроить и опытным путём. Необходимо устроить прогон 3D принтера на высокой скорости по всем координатам. Оптимальным считается, когда шаговые двигатели уже не гудят и ещё не пропускают шаги.
Максимально допустимый ток подаваемый на обмотку, у микросхемы A4988 равен 2 A. Фактический ток, который можно подать на плату, зависит от качества охлаждения микросхемы. Плата разработана с учётом отвода тепла от микросхемы, но при токе выше 1 A на обмотку необходим теплоотвод или другое дополнительное охлаждение.
Внимание: плата драйвера может нагреться так, что можно получить ожог, задолго до того как перегреется сама микросхема. Будьте осторожны при обращении с платой и со всеми подключёнными к ней устройствами.
Обратите внимание, что ток, измеренный на источнике питания, как правило, не соответствует величине тока на обмотке. Так как напряжение, подаваемое на драйвер, может быть значительно выше напряжения на обмотке, то, соответственно, измеряемый ток на источнике питания может быть немного ниже, чем ток на обмотке (драйвер и обмотка в основном работают в качестве переключаемого источника с пошаговым понижением питания). Кроме того, если напряжение питания намного выше необходимого двигателю уровня для достижения требуемого тока, то скважность будет очень низкой, что также приводит к существенным различиям между средним и RMS током (среднеквадратичное значение переменного тока).
Источник
Видео
Шаговый двигатель. Micro Step Driver. PLC Omron. Подключение,программирование. (Часть 1)
Как настроить драйвер шагового двигателя
Шаговый двигатель запуск без контроллера\драйвера
Урок: Управление шаговым двигателем NEMA17 — Stepper motor control. Working with a sketch
Working with a sketch
Драйвер шагового двигателя HY-DIV268N-5A (TB6600)
Обзор копеечной платы управления шаговым двигателем.
Подключение шагового двигателя
Подключение драйвера и двигателя к плате USB (станок ЧПУ)
☕PWM генератор-контроллер шагового двигателя
ШАГОВЫЙ ДВИГАТЕЛЬ ПРОСТОЙ ДРАЙВЕР ДЛЯ НЕГО
Делаем Fischertechnik-совместимый модуль управления шаговым мотором на основе драйвера A4988 (DRV8825) / Хабр
Уже давно я припас все детали, перечисленные ниже, и осталось собрать все вместе и получить модуль управления мотором для удобной установки на конструктор. Конечно, сначала мы подключили катушки шагового мотора с помощью простого H-bridge и оценили, почему так делать не стоит. Далее мотор был подключен с помощью драйвера и разница оказалась более чем наглядной.
2 вывода питания с коннекторами Фишертехник, 4 вывода для подключения мотора и 5 выводов для подключения микроконтроллера (step, dir, enable). Отверстия в крышке пропилены с помощью Dremel, равно как и проточено отверстие в шестеренке под вал мотора — предупреждаю, пластик Фишертехника, хоть он и гибкий, обрабатывается не проще металла!
Введение
Нам захотелось сделать стандартный блок Фишертехник, который быстро и удобно устанавливается на любую модель и позволяет управлять шаговым мотором Nema 14, закрепленном в стандартном креплении Фишертехник.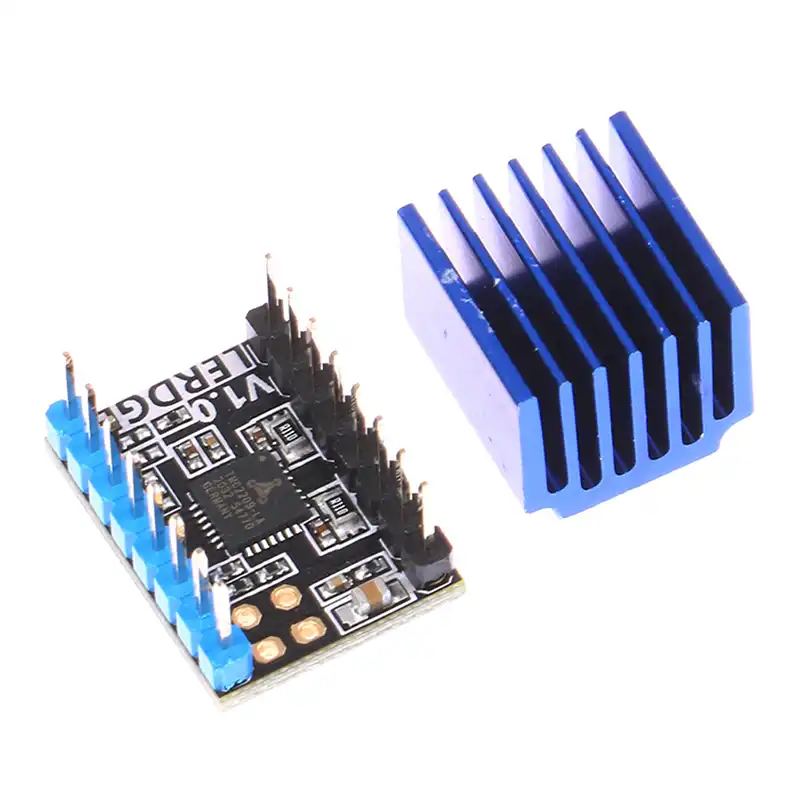 При этом, обеспечить «правильное» управление мотором (с ограничением рабочего тока) и тихое и быстрое его вращение. Соответственно, мы попробовали разные способы управления мотором и убедились, что специализированный драйвер представляет собой оптимальное решение.
При этом, обеспечить «правильное» управление мотором (с ограничением рабочего тока) и тихое и быстрое его вращение. Соответственно, мы попробовали разные способы управления мотором и убедились, что специализированный драйвер представляет собой оптимальное решение.
Двумя катушками шагового мотора Nema можно управлять как двумя обычными моторами с помощью PWM (широтно-импульсной модуляции) и H-bridge, выбрав подходящее значение питающего напряжения так, чтобы не слишком превышать допустимый ток, и переключая их по очереди. Для управления двигателями у нас есть как копеечная микросхема SN754410NE Quadruple Half-H Driver так и плата расширения Kitronik Compact All-In-One Robotics Board for BBC micro:bit, преимущество платы расширения в том, что она включает в себя I2C расширитель портов на 16 выходов с подключенными H-bridge на 4 мотора и коннекторами для 8 сервоприводов и блоки для управления в среде разработки MakeCode, а также обеспечивает питание вставленного микроконтроллера Microbit от питающего напряжения до 10. 8 В.
8 В.
Детали и инструменты
Из каталога Фишертехник потребовались следующие детали:
- Корпус для батарейки 9В
- Крышка для корпуса
- Держатель шагового двигателя
- Шестерня-адаптер Z10 m1,5 для мотора
С Aliexpress были заказаны:
- Nema 14 мотор Hanpose. Замечу, что моторы данного формфактора и с таким же валом на Амазоне и в других каталогах представлены от этого же производителя. Есть еще аналогичные моторы с круглым валом — но его придется пилить дремелем, чтобы насадить шестерню Фишертехник (или ставить муфту, что вовсе не всегда удобно).
- A4988 DRV8825 Stepper Motor Driver. Обратите здесь внимание на подробное описание драйвера по ссылке. Сейчас этот лот недоступен, но полно аналогичных.
- Резисторы набором, включая номинал 4.7 кОм (подключен для подтяжки входа Enable драйвера мотора к питанию микроконтроллера).
- Конденсаторы электролитические набором, включая номинал 47 мкф (подключен к цепи питания драйвера мотора согласно схеме).
- SN754410NE Quadruple Half-H Driver — ссылку на лот не сохранил, так что смотрите ссылку на даташит, микросхема популярная и копеечная, меньше чем по 5 штук в продаже не встречал. Использована для «неправильного» подключения шагового мотора без использования платы расширения Kitronik (см. ниже), чтобы продемонстрировать детям, как сделать все то же самое намного дешевле, но с меньшим удобством.
- Какая-то плата расширения для Micro:Bit с выведенными пинами микроконтроллера и напряжением питания 5 В. Использована только для первой фотографии в статье, чтобы продемонстрировать — модуль работает напрямую с микроконтроллером без использования каких-либо функций плат расширения.
С британского сайта компании Pimoroni приехали:
- Подходящая по размеру макетная плата Pico Proto. Легко заменяется макетной платой, обрезанной до нужного размера.
- Kitronik Compact Motor Driver Board for the BBC micro:bit — нужна только для «неправильного» подключения мотора для сравнительного теста. Можно заменить микросхемой Half-H Driver (см. выше).
 Можно заменить микросхемой Half-H Driver (см. выше).
Можно заменить микросхемой Half-H Driver (см. выше).
Все это спаяно паяльной станцией QUECOO с жалом T12 при температуре 330°C бессвинцовым припоем 0.8 мм. Кстати, припой японский HIROSAKI M705 с 3% серебра — выбран как самый доступный 🙂 В Таиланде оказалось сложно найти бессвинцовый припой в розницу (оптом — пожалуйста, большой выбор), да еще и малого диаметра. Припой хороший и, по ощущениям, более текучий, чем припой без серебра Pimoroni Lead Free Solder, но в целом, большой разницы мы не заметили. Для развлечений с детьми свинцовый припой не рассматриваю в принципе, впрочем, мы не испытываем каких-либо затруднений при пайке бессвинцовым — в том числе, компонентов поверхностного монтажа.
Простой и неправильный способ управления шаговым мотором
Поскольку наш мотор по спецификации на 1.2 А и сопротивлением обмотки 4 Ом, рабочее напряжение для него должно быть примерно 3.5 В (4 Ом*1.2 А/2/0.7 = 3.4 В). С учетом падения напряжения на источнике и проводах можно воспользоваться и аккумулятором на 5 В, при этом замеренный ток батареи составляет 1.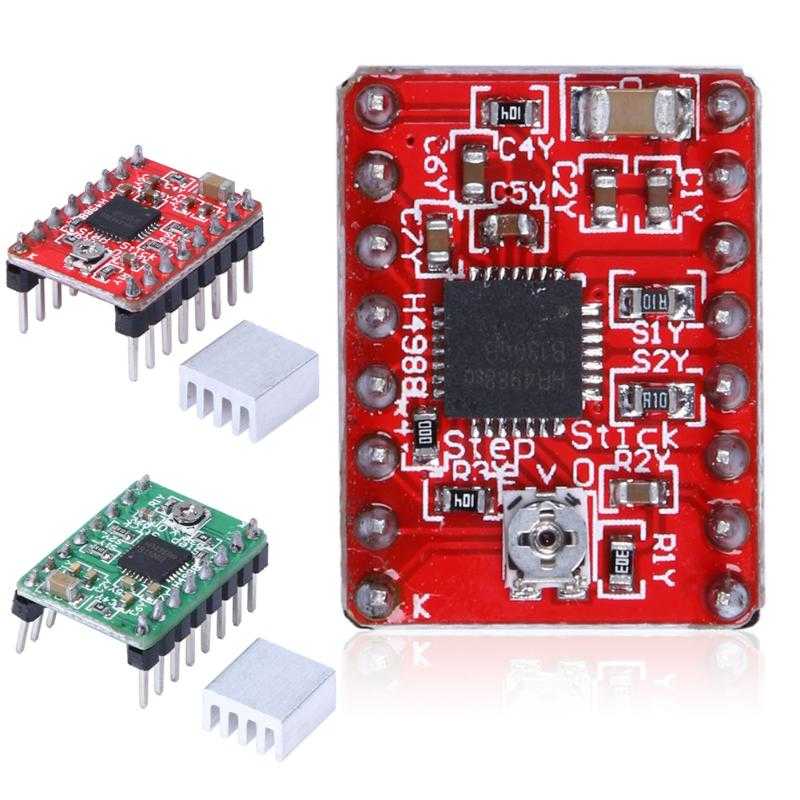 8 А. При этом мотор ощутимо греется — примерно до 60°C на 60 оборотах, шумит, и вращается достаточно медленно (плата расширения использует PWM 50 Гц для управления моторами и сервоприводами). В целом, пользоваться можно, если нам достаточно повернуть вал на заданное число оборотов и потом обесточить обмотки (при этом вал начнет свободно вращаться без удержания положения).
8 А. При этом мотор ощутимо греется — примерно до 60°C на 60 оборотах, шумит, и вращается достаточно медленно (плата расширения использует PWM 50 Гц для управления моторами и сервоприводами). В целом, пользоваться можно, если нам достаточно повернуть вал на заданное число оборотов и потом обесточить обмотки (при этом вал начнет свободно вращаться без удержания положения).
Практически такой метод хоть и работает, но плохо — мотор стартует рывком, буквально разламывая собранную с ним модель, шумит и греется, притом быстро разряжая аккумулятор. При длительной работе возможно «спалить» мотор из-за превышения допустимого тока, хотя, скорее, при таком токе потребления раньше батарея разрядится.
Использование драйвера шагового мотора A4988 (DRV8825)
Драйвер осуществляет управление мотором посредством контроля тока через обмотки, что гарантирует сохранность двигателя (соответствие спецификации по допустимому току) и позволяет подавать на двигатель высокое напряжение до 35 В (обеспечивая более быстрое перемещение вала за счет быстрого нарастания тока до предельного).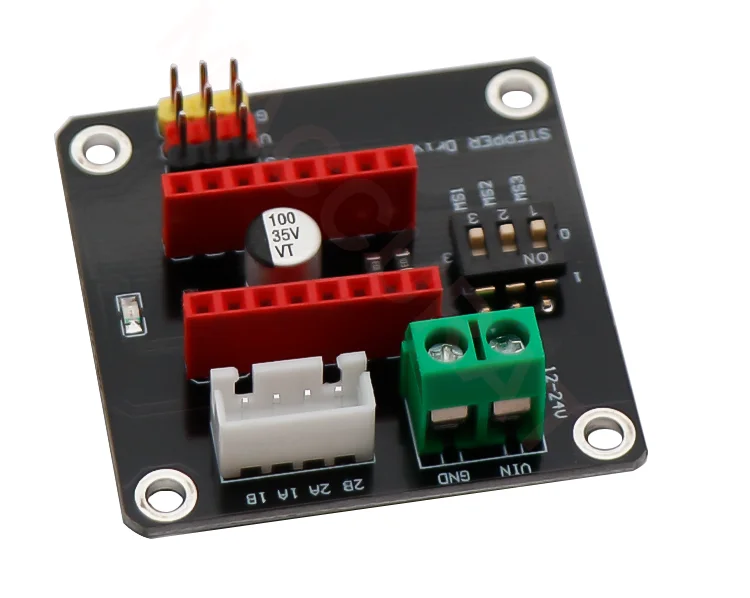 Такой контроль можно реализовать и непосредственно на микроконтроллере, используя аналоговые входы и вычисление управляющего сигнала с синусоидальной огибающей, хотя для практического использования это не очень удобно (потребуются лишняя «обвязка» и занятые входы).
Такой контроль можно реализовать и непосредственно на микроконтроллере, используя аналоговые входы и вычисление управляющего сигнала с синусоидальной огибающей, хотя для практического использования это не очень удобно (потребуются лишняя «обвязка» и занятые входы).
Указанные драйверы шагового мотора требуют питающее напряжение не ниже 8 В, а плата расширения позволяет подключать питающее напряжение в широком диапазоне, включая стандартные 5 В и 9 В от батареи Фишертехник. Для универсальности мы добавили преобразователь напряжения на 12 В для питания мотора, так что полученный модуль работает и от USB блоков питания и от батарей Фишертехник, притом обеспечивая достаточно быстрый поворот мотора.
Микрошаги нам пока не нужны, так что соответствующие входы драйвера не подключены, что обеспечивает работу в так называемом режиме полного шага.
Подробнее смотрите A4988 Stepper Motor Driver Carrier
Для управления драйвером достаточно двух пинов Step и Dir (шаг и направление), при этом их необходимо «подтянуть» к «земле» (нулю) для исключения самопроизвольного подергивания двигателя при включении или перезагрузке управляющего микроконтроллера из-за «наводок». Номинал подтягивающих резисторов зависит от длины проводов и их расположения, например, 4.7 кОм нам обычно достаточно (хотя для длинных проводов в несколько метров могут понадобиться подтягивающие резисторы в 1 кОм и даже менее), а 10 кОм порой приводят к нестабильной работе. Впрочем, мы не стали подключать эти резисторы и воспользовались другим методом.
Номинал подтягивающих резисторов зависит от длины проводов и их расположения, например, 4.7 кОм нам обычно достаточно (хотя для длинных проводов в несколько метров могут понадобиться подтягивающие резисторы в 1 кОм и даже менее), а 10 кОм порой приводят к нестабильной работе. Впрочем, мы не стали подключать эти резисторы и воспользовались другим методом.
Пин драйвера Enable не является обязательным к использованию и позволяет заблокировать драйвер и обесточить мотор ценой потери удерживающего момента на нем. По умолчанию этот пин уже «подтянут» к нулю. Поскольку мы хотели иметь возможность отключать мотор для экономии батареи, то решили добавить подтягивающий резистор 4.7 кОм к питанию микроконтроллера. Так мы получили выключенный по умолчанию драйвер и двигатель, для включения нужно подать ноль (низкий логический уровень) на пин Enable. При таком подключении можно обойтись без «подтяжки» пинов Step и Dir, управляя ими программно с микроконтроллера.
Для настройки тока драйвера можно настроить максимальный ток одной из обмоток как половину максимального тока мотора поделенную на 0.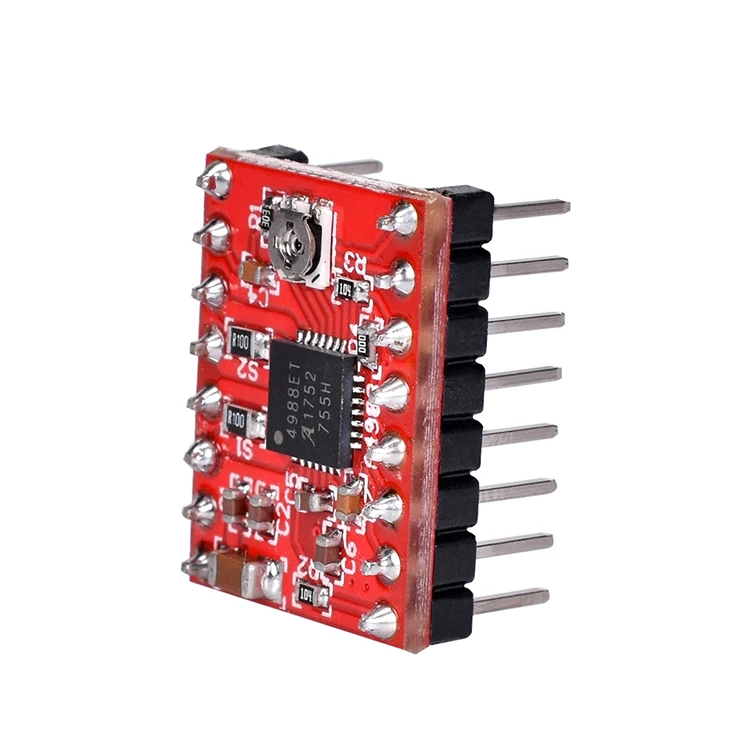 7 (поскольку квадрат суммарного тока равен сумме квадратов токов двух обмоток) или использовать формулу зависимости выходного тока от напряжения на потенциометре (если нам известен номинал тококонтролирующего резистора на плате драйвера) или просто измерять потребляемый от батареи ток (внимание — ток на обмотках мотора не равен току от батареи, зато мощность двигателя почти равна потребляемой мощности).
7 (поскольку квадрат суммарного тока равен сумме квадратов токов двух обмоток) или использовать формулу зависимости выходного тока от напряжения на потенциометре (если нам известен номинал тококонтролирующего резистора на плате драйвера) или просто измерять потребляемый от батареи ток (внимание — ток на обмотках мотора не равен току от батареи, зато мощность двигателя почти равна потребляемой мощности).
Как результат, с драйвером мы получили втрое меньшее потребление тока батареи 0.6 А при мягком старте и бесшумной работе двигателя и намного более быстром его вращении. Двигатель теперь практически не греется, хотя, разумеется, продолжает потреблять указанный ток даже при остановке (так уж устроен шаговый двигатель). Наличие выведенного пина Enable позволяет выключать двигатель на то время, когда не требуется удержание вала (например, для перемещения конвейера в удержании позиции нет необходимости).
Подключение и управление модулем
Сделанный согласно вышеизложенному модуль со снятой крышкой выглядит так:
Провод питания проведен через весь модуль, чтобы избежать открывания крышки при рывках питающего провода.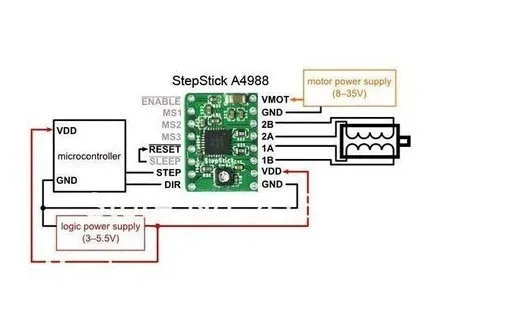 Радиаторы на преобразователь напряжения и драйвер мотора не нужны, поскольку они ощутимо не нагреваются, работая примерно на треть допустимой мощности.
Радиаторы на преобразователь напряжения и драйвер мотора не нужны, поскольку они ощутимо не нагреваются, работая примерно на треть допустимой мощности.
Типовый Nema двигатель обеспечивает 200 RPM (оборотов в минуту) при 200 шагах на оборот, что соответствует 1.5 миллисекунды на шаг. Для управления можно использовать PWM с соответствующим периодом или просто переключать логические уровни с нужной задержкой. Притом драйвер управляется возрастающим фронтом на входе Step, а по спецификации, высокий логический уровень достаточно подать на 1 микросекунду. Таким образом, управление модулем осуществляется очень просто. Пример кода в среде MakeCode для вращения по часовой стрелке и против нее (направление зависит от подключения мотора к модулю — если перевернуть коннектор мотора, направление инвертируется):
Заключение
Сегодня мы дополнили конструктор Фишертехник полезным модулем и в процессе обсудили с детьми много всего интересного и полезного. Дальше было бы интересно подготовить печатную плату и заказать ее, к примеру, на JLCPCB, благо доставка из Гонконга в Таиланд стоит недорого. Аналогично, можно заказать и 3D печать — было бы удобнее напечатать подходящую крышку модуля, вместо того, чтобы резать оригинальную дремелем.
Аналогично, можно заказать и 3D печать — было бы удобнее напечатать подходящую крышку модуля, вместо того, чтобы резать оригинальную дремелем.
Еще у нас лежит блок управления панелями адресных светодиодов на микроконтроллере Raspberry Pi Pico в точно такой же коробочке Фишертехник, который мы делали на Новый год — радуга для подсветки комнаты, расположенная за телевизором. Pico хорош в том числе и тем, что легко помещается в такой корпус, даже вместе с макетной платой Pico Proto. Если доберусь, напишу и об этой самоделке, детям она очень нравится 🙂
Также смотрите
- Геопространственный анализ, геофизика, геология, физика, математика, вычислительные методы, Фишертехник на Хабре
- Geophysics and geospatial analysis on LinkedIn
- Геологические модели и код на GitHub
- YouTube канал с геологическими моделями
- Геологические модели в виртуальной/дополненной реальности (VR/AR)
A4988 Держатель драйвера шагового двигателя
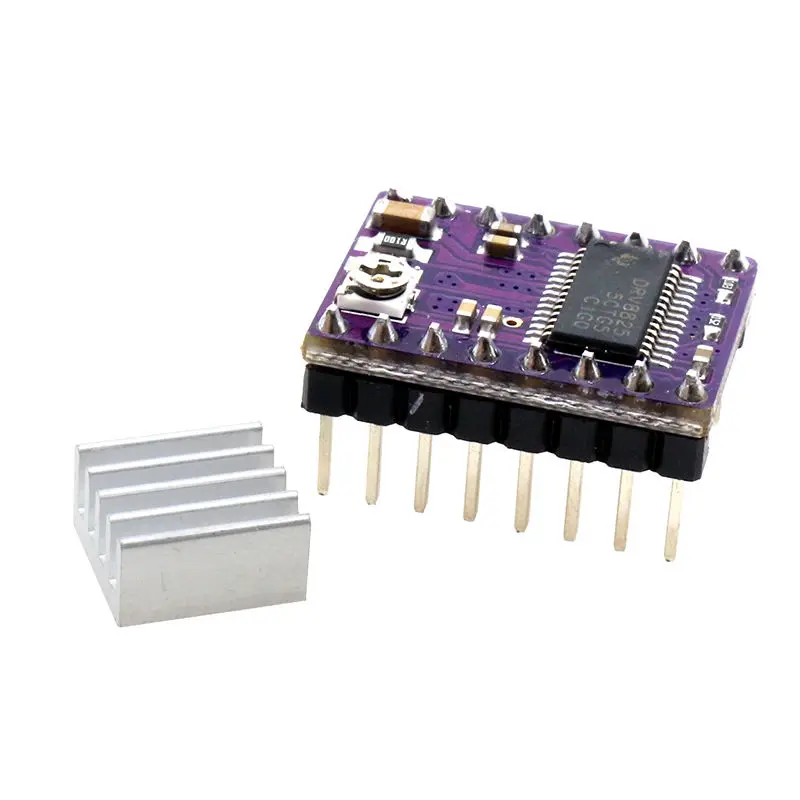
A4983/A4988 Держатель драйвера шагового двигателя с размерами. |
|---|
Обзор
Этот продукт представляет собой плату-носитель или коммутационную плату для микрошагового драйвера Allegro A4988 DMOS с преобразователем и защитой от перегрузки по току; поэтому мы рекомендуем внимательно прочитать техническое описание A4988 (1 МБ в формате pdf) перед использованием этого продукта. Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку (см.0017 Рекомендации по рассеиванию мощности (см. раздел ниже для получения дополнительной информации). Вот некоторые из ключевых особенностей драйвера:
- Простой интерфейс управления шагом и направлением
- Пять различных шагов разрешения: полный шаг, полшага, четверть шага, восьмой шаг и шестнадцатый шаг
- Регулируемое управление током позволяет установить максимальный выходной ток с помощью потенциометра, что позволяет использовать напряжения выше номинального напряжения шагового двигателя для достижения более высокой частоты шагов
- Интеллектуальное управление прерыванием, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- Тепловое отключение при перегреве, блокировка при пониженном напряжении и защита от перегрузки по току
- Защита от короткого замыкания на землю и нагрузки
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера A4988, установленными, как показано на изображении продукта.
Этот продукт поставляется в индивидуальной упаковке с 0,1-дюймовыми контактными штырьками, входящими в комплект, но не припаянными; у нас также есть версия с уже впаянными контактными штырями. Для клиентов, заинтересованных в больших объемах при более низкой удельной стоимости, мы предлагаем версию в упаковке без штырей и версию с установленными штырями.
Обратите внимание, что у нас есть несколько драйверов шаговых двигателей, которые можно использовать в качестве альтернативы этому модулю (и замены во многих приложениях):
- Доступен держатель драйвера шагового двигателя Black Edition A4988, производительность которого примерно на 20 % выше; за исключением тепловых характеристик, Black Edition и эта (зеленая) плата взаимозаменяемы.
- Носитель MP6500 может выдавать до 1,5 А на фазу (непрерывно) без радиатора и доступен в двух версиях: одна с потенциометром для управления ограничением тока и одна с цифровым управлением ограничением тока для динамической регулировки ограничения тока с помощью микроконтроллера. .
- Платформа DRV8825 обеспечивает примерно на 50 % лучшую производительность в более широком диапазоне напряжений и имеет несколько дополнительных функций.
- Платформа DRV8834 работает с напряжением питания двигателя от 2,5 В, что делает ее подходящей для низковольтных приложений.
- Базовая станция DRV8880 предлагает динамически масштабируемое ограничение тока и «Автонастройку», которая автоматически выбирает режим затухания в каждом цикле ШИМ для оптимального регулирования тока на основе таких факторов, как сопротивление и индуктивность обмотки двигателя, а также динамическая скорость двигателя и нагрузка.
 .
.Мы также продаем более крупную версию шасси A4988 с защитой от обратного питания на входе основного питания и встроенными регуляторами напряжения 5 В и 3,3 В, что устраняет необходимость в отдельных источниках питания логики и двигателя.
Некоторыми униполярными шаговыми двигателями (например, с шестью или восемью выводами) этот драйвер может управлять как биполярными шаговыми двигателями. Для получения дополнительной информации см. часто задаваемые вопросы. Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Для получения дополнительной информации см. часто задаваемые вопросы. Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Аппаратное обеспечение в комплекте
Держатель драйвера шагового двигателя A4988 поставляется с одним 1×16-контактным отрывным разъемом 0,1 дюйма. Разъемы можно впаивать для использования с непаянными макетными платами или разъемами 0,1 дюйма. Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными разъемами).
Использование драйвера
Минимальная схема подключения микроконтроллера к шасси драйвера шагового двигателя A4988 (полношаговый режим). |
|---|
Силовые соединения
Драйверу требуется, чтобы напряжение питания логики (3–5,5 В) было подключено к контактам VDD и GND, а напряжение питания двигателя (8–35 В) должно быть подключено к контактам VMOT и GND. Эти источники питания должны иметь соответствующие развязывающие конденсаторы рядом с платой и должны обеспечивать ожидаемые токи (пики до 4 А для питания двигателя).
Эти источники питания должны иметь соответствующие развязывающие конденсаторы рядом с платой и должны обеспечивать ожидаемые токи (пики до 4 А для питания двигателя).
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к разрушительным скачкам напряжения LC, особенно при использовании проводов питания длиннее нескольких дюймов. При определенных условиях эти всплески могут превысить максимальное номинальное напряжение 35 В для A4988 и необратимо повредить плату, даже если напряжение питания двигателя составляет всего 12 В. Один из способов защитить драйвер от таких всплесков — поставить большой (не менее 47 мкФ) электролитический конденсатор по мощности двигателя (VMOT) и земле где-то рядом с платой.
Соединения двигателей
Четырех-, шести- и восьмипроводные шаговые двигатели могут управляться A4988, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может вывести его из строя. (В более общем случае переподключение чего-либо под напряжением вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигатели обычно имеют спецификацию размера шага (например, 1,8° или 200 шагов на оборот), которая относится к полным шагам. . Микрошаговый драйвер, такой как A4988 позволяет получить более высокое разрешение за счет размещения промежуточных ступеней, что достигается за счет питания катушек промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
Входы селектора разрешения (размера шага) (MS1, MS2 и MS3) позволяют выбрать один из пяти шагов разрешения в соответствии с таблицей ниже. MS1 и MS3 имеют внутренние подтягивающие резисторы на 100 кОм, а MS2 имеет внутренний подтягивающий резистор на 50 кОм, поэтому отключение этих трех контактов выбора микрошага приводит к полношаговому режиму.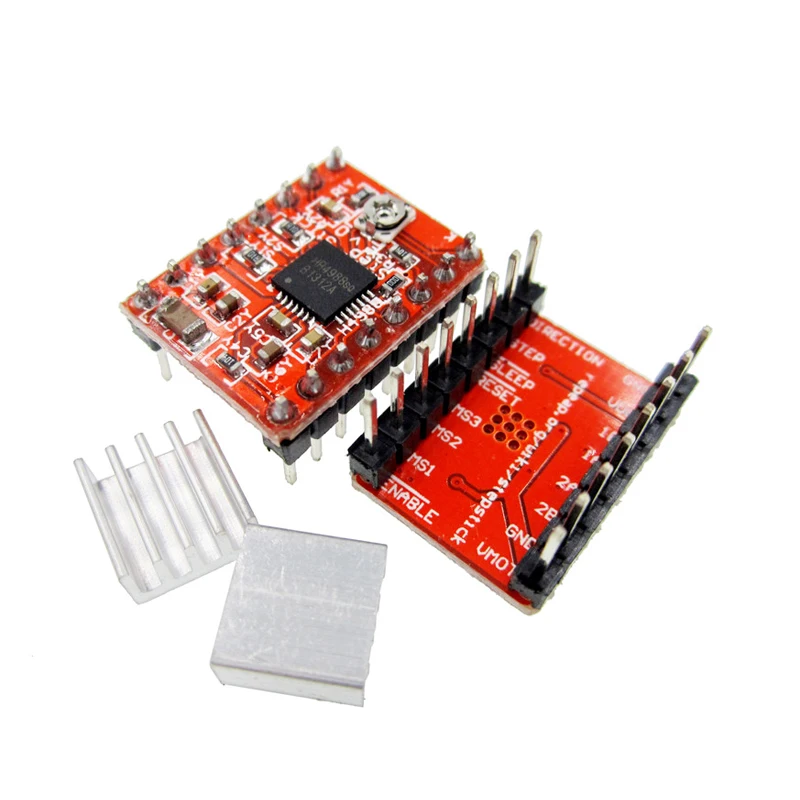 Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
| MS1 | МС2 | МС3 | Разрешение микрошага |
|---|---|---|---|
| Низкий | Низкий | Низкий | Полный шаг |
| Высокий | Низкий | Низкий | Полушаг |
| Низкий | Высокий | Низкий | Четверть шага |
| Высокий | Высокий | Низкий | Восьмой шаг |
| Высокий | Высокий | Высокий | Шестнадцатый шаг |
Входы управления
Каждый импульс на вход STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR. Обратите внимание, что выводы STEP и DIR не подключены к какому-либо определенному внутреннему напряжению, поэтому вы не должны оставлять ни один из этих выводов плавающим в своем приложении. Если вам просто нужно вращение в одном направлении, вы можете напрямую связать DIR с VCC или GND. Микросхема имеет три различных входа для управления многочисленными состояниями питания: RST, SLP и EN. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что контакт RST является плавающим; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы перевести его в высокий уровень и включить плату.
Если вам просто нужно вращение в одном направлении, вы можете напрямую связать DIR с VCC или GND. Микросхема имеет три различных входа для управления многочисленными состояниями питания: RST, SLP и EN. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что контакт RST является плавающим; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы перевести его в высокий уровень и включить плату.
Ограничение тока
Одним из способов максимизировать производительность шагового двигателя является использование максимально возможного для вашего приложения напряжения. В частности, увеличение напряжения обычно позволяет увеличить скорость шага и вращающий момент шага, поскольку ток в катушках может изменяться быстрее после каждого шага.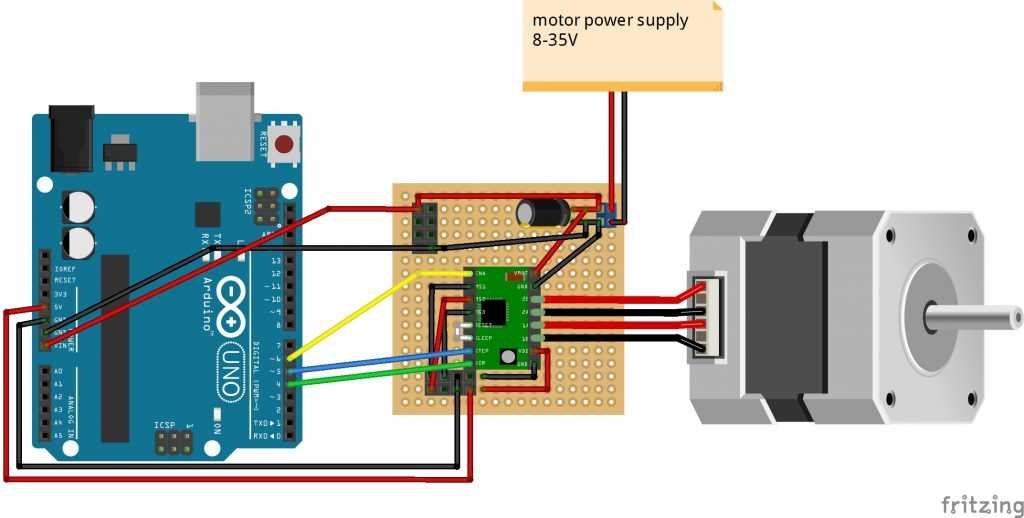 Однако, чтобы безопасно использовать напряжения выше номинального напряжения шагового двигателя, ток катушки должен активно ограничиваться, чтобы не допустить превышения номинального тока двигателя.
Однако, чтобы безопасно использовать напряжения выше номинального напряжения шагового двигателя, ток катушки должен активно ограничиваться, чтобы не допустить превышения номинального тока двигателя.
A4988 поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате можно использовать для установки ограничения тока. Одним из способов установки ограничения тока является перевод драйвера в полношаговый режим и измерение тока, протекающего через одну катушку двигателя, при регулировке потенциометра ограничения тока. Это должно быть сделано с двигателем, удерживающим фиксированное положение (т. е. без тактирования входа STEP). Обратите внимание, , что измеряемый ток составляет всего 70% от фактической настройки ограничения тока , так как обе катушки всегда включены и ограничены этим значением в полношаговом режиме, поэтому, если вы позже включите микрошаговые режимы, ток через катушки сможет превысить этот измеренный полношаговый ток на 40% (1/0,7 ) на определенных шагах; пожалуйста, примите это во внимание при использовании этого метода для установки ограничения тока.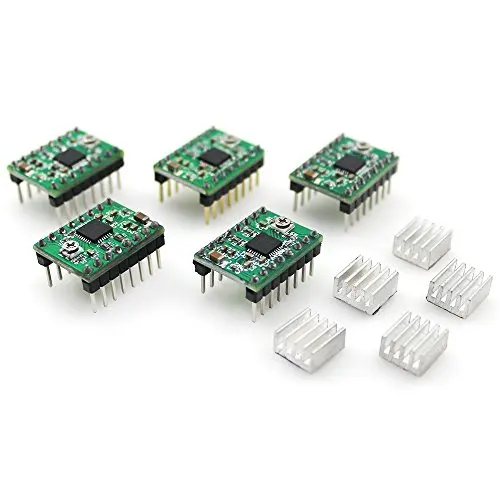 Также обратите внимание, что вам нужно будет выполнить эту регулировку снова, если вы когда-либо изменяли логическое напряжение, Vdd, так как опорное напряжение, которое устанавливает ограничение тока, является функцией Vdd.
Также обратите внимание, что вам нужно будет выполнить эту регулировку снова, если вы когда-либо изменяли логическое напряжение, Vdd, так как опорное напряжение, которое устанавливает ограничение тока, является функцией Vdd.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока. Подходящим местом для установки вашего амперметра является последовательное соединение с одной из катушек вашего шагового двигателя.
Другой способ установить ограничение тока — рассчитать опорное напряжение, соответствующее желаемому ограничению тока, а затем отрегулировать потенциометр ограничения тока до тех пор, пока не будет измерено это напряжение на
.0099 VREF пин. Напряжение на выводе VREF доступно через переходное отверстие, обведенное кружком в нижней части печатной платы. Ограничение по току, I MAX , относится к эталонному напряжению следующим образом: для VREF:
«V_(REF) = 8 * I_(MAX) * R_(CS)«
R CS сопротивление датчика тока; В оригинальных версиях этой платы использовались резисторы 0,050 Ом , но мы переключились на использование 9 резисторов.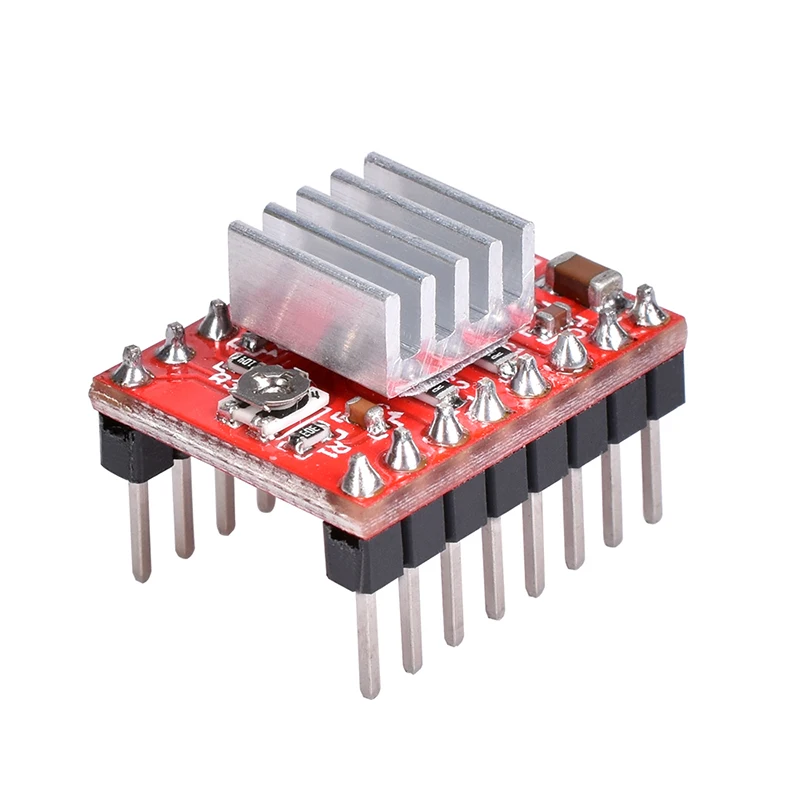 0099 0,068 Ом токоизмерительных резисторов в январе 2017 года, что делает более полезным диапазон регулировочного потенциометра. На следующем рисунке показано, как определить, какие токоизмерительные резисторы установлены на вашей плате:
0099 0,068 Ом токоизмерительных резисторов в январе 2017 года, что делает более полезным диапазон регулировочного потенциометра. На следующем рисунке показано, как определить, какие токоизмерительные резисторы установлены на вашей плате:
Идентификация оригинальных измерительных резисторов 50 мОм (слева) и 68 мОм (справа), представленных в январе 2017 г. |
|---|
Так, например, если вы хотите установить ограничение тока на 1 А и у вас есть плата с резисторами 68 мОм, вы должны установить VREF на 540 мВ. Это гарантирует, что, даже если ток через каждую катушку меняется от шага к шагу, величина вектора тока в шаговом двигателе остается постоянной на уровне 1 А: 92) = I_(MAX) = 1 text (A)«
Если вместо этого вы хотите, чтобы ток через для каждой катушки составлял 1 А в полношаговом режиме, вам нужно установить ограничение тока на 40 %. выше, или 1,4 А, поскольку катушки ограничены примерно 70 % от установленного предельного тока в полношаговом режиме (приведенное выше уравнение показывает, почему это так).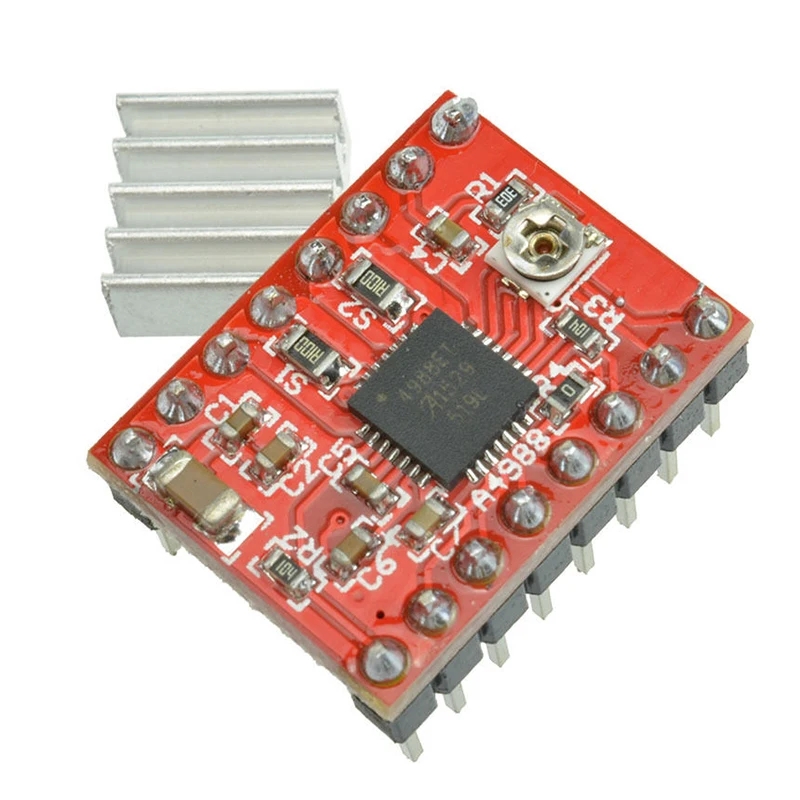 Чтобы сделать это с платой с чувствительными резисторами 68 мОм, вы должны установить VREF на 770 мВ.
Чтобы сделать это с платой с чувствительными резисторами 68 мОм, вы должны установить VREF на 770 мВ.
Соображения по рассеиваемой мощности
ИС драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, но фактический ток, который вы можете обеспечить, зависит от того, насколько хорошо вы можете поддерживать охлаждение ИС. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более приблизительно 1 А на катушку требуется радиатор или другой метод охлаждения.
Этот продукт может нагреть до такой степени, что обожжет вас задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания).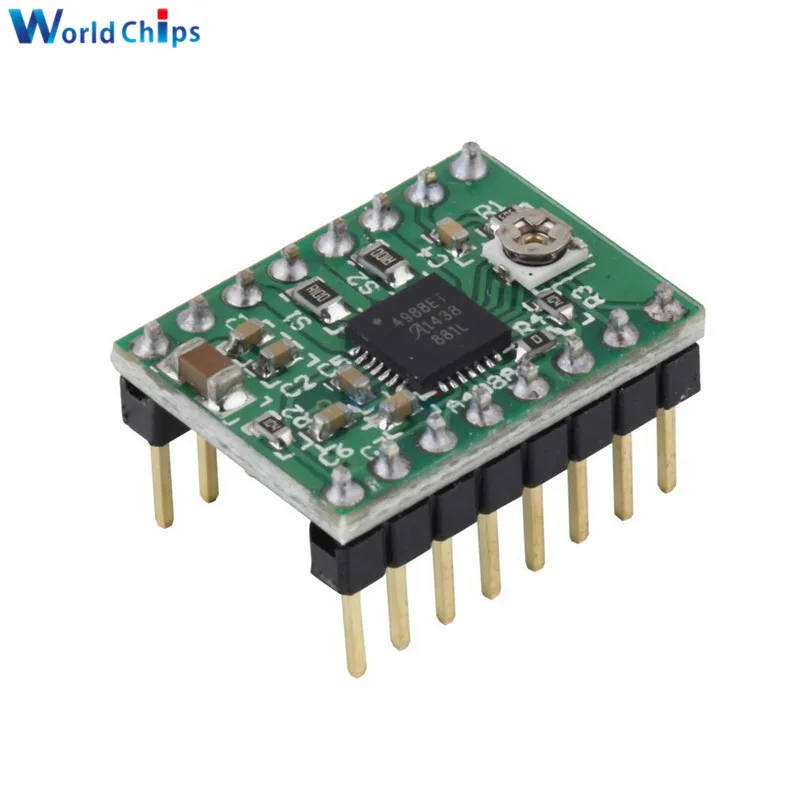 Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами.
Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами.
Схематическая диаграмма
Схематическая диаграмма держателя драйвера шагового двигателя A4988 (зеленая и черная версии). |
|---|
Примечание: Эта плата является заменой нашего оригинального (и в настоящее время снятого с производства) держателя драйвера шагового двигателя A4983. Более новый A4988 предлагает защиту от перегрузки по току и имеет внутреннее понижение 100k на выводе выбора микрошага MS1, но в остальном он практически идентичен A49.83.
Ошибка 404
Ошибка 404
изображение/svg+xml
Выбранная страна и язык определяют ваши торговые условия, цены на товары и специальные предложения.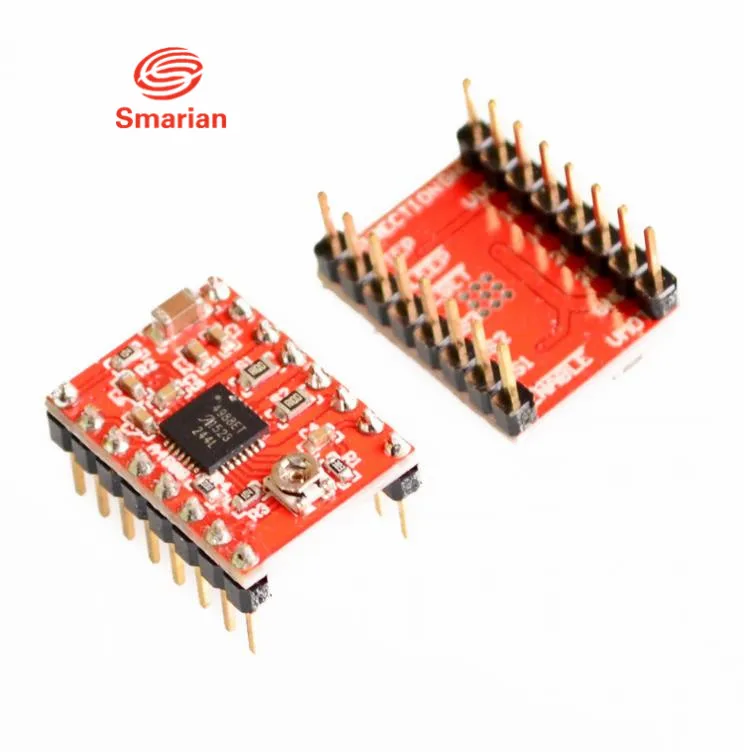
Страна
Язык
Валюта
Цены
нетто
брутто
сеть
валовой
Воспользуйтесь поисковой системой, чтобы найти интересующие вас вопросы, или перейдите в одну из следующих областей:
Каталог
Как купить
Помощь
или вернуться к:
Главная страница
Мы рекомендуем вам подписаться
В каждом информационном бюллетене вы найдете важную и интересную информацию о новых продуктах, распространении и изменениях на сайте TME.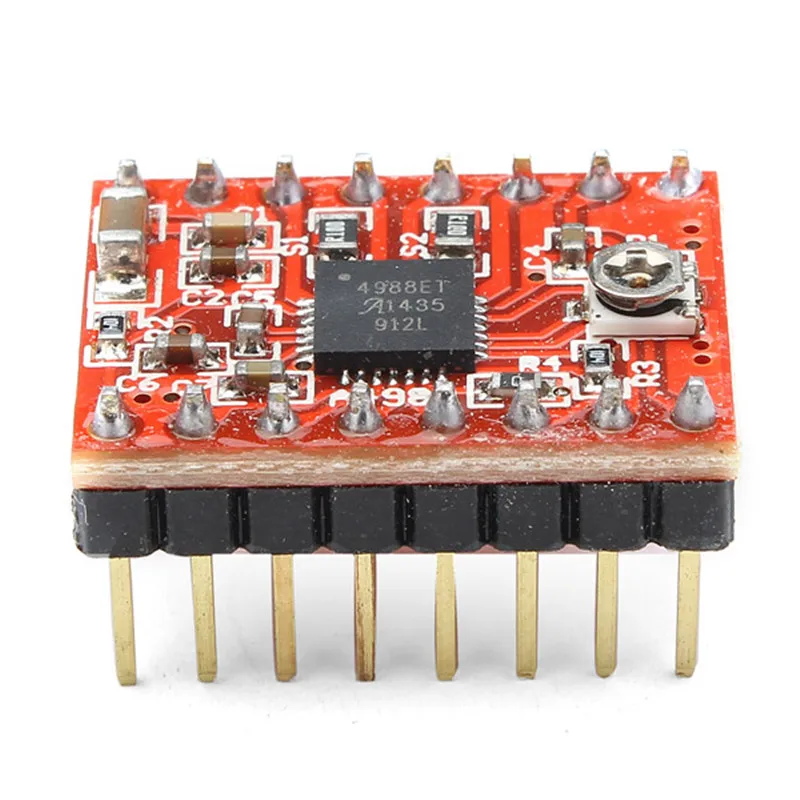
Здесь же можно отписаться от рассылки.
* обязательное поле
ПодписатьсяОтписаться
Я прочитал и понял Политику новостной рассылки TME и настоящим даю согласие на отправку цифровой информационной рассылки службы TME на мой адрес электронной почты. Политика информационного бюллетеня TME
*
1. Transfer Multisort Elektronik sp. о.о., ул. Ustronna 41, 93-350 Łódź настоящим информирует вас о том, что он будет контролером ваших личных данных.
2. Контроллер персональных данных назначил ответственного за защиту данных, с которым можно связаться по электронной почте: [email protected].
3. Ваши данные будут обрабатываться на основании пункта (а) статьи 6(1) Регламента Европейского парламента и Совета (ЕС) 2016/679 от 27 апреля 2016 г. о защите физических лиц в отношении обработки персональных данных и о свободном перемещении таких данных и отмене Директивы 95/46/ЕС (далее: GDPR), для отправки на указанный адрес электронной почты электронного информационного бюллетеня TME .
4. Предоставление данных является добровольным, однако необходимо направить информационный бюллетень.
5. Ваши персональные данные будут храниться до тех пор, пока вы не отзовете свое согласие на обработку ваших персональных данных.
6. Вы имеете право получить доступ к своим личным данным и запросить их исправление, удаление или ограничение их обработки;
7. Если ваши личные данные обрабатываются на основании вашего согласия, вы имеете право отозвать это согласие. Отзыв согласия не влияет на законность обработки, которая была выполнена до отзыва.
8. Вы также имеете право подать жалобу в надзорный орган по защите данных.
более
меньше
Подпишитесь на информационный бюллетень TME
Специальные предложения — скидки — новинки. Будьте в курсе предложений TME
Информационный бюллетень Правила и условия
Отписаться
Идет обработка данных
Задача успешно выполнена.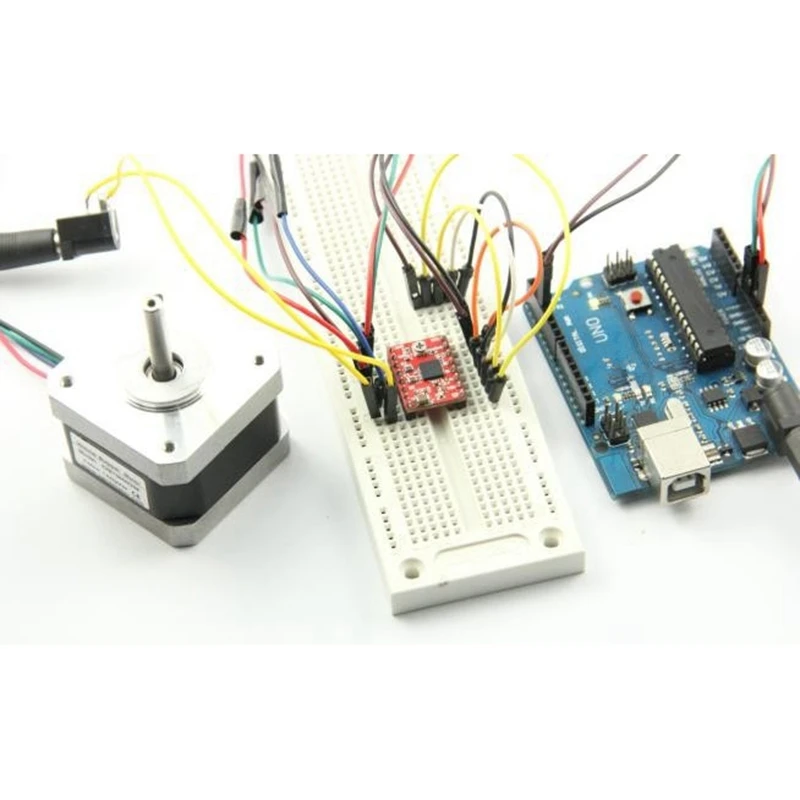
Произошла непредвиденная ошибка. Пожалуйста, попробуйте еще раз.
Логин
Пароль
Вы должны ввести номер клиента и пароль
Введенное в поле значение слишком короткое. Минимальная длина должна быть %minLength% символов.
Забыли свой пароль?
Ваш веб-браузер больше не поддерживается, загрузите новую версию
Хром
Скачать
Fire Fox
Скачать
Опера
Скачать
Интернет-проводник
Скачать
Выберите почтовый ящик
Этот веб-сайт использует файлы cookie.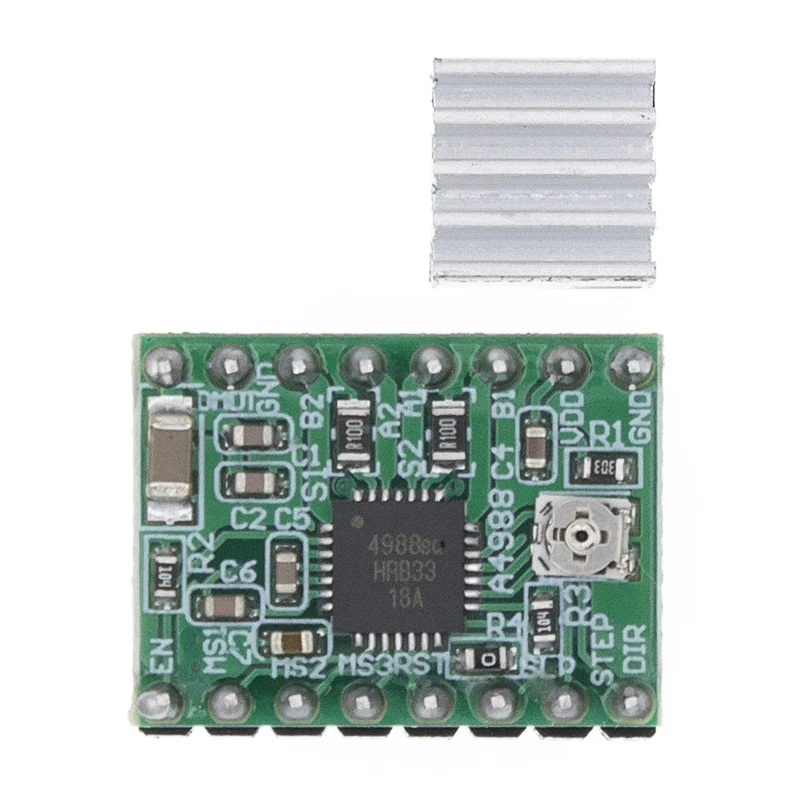 Нажмите здесь, чтобы узнать больше о файлах cookie и их настройках.
Нажмите здесь, чтобы узнать больше о файлах cookie и их настройках.
Драйвер шагового двигателя – A4988 – BULK-MAN 3D
1,98 долл. США – 19,80 долл. США
Держатель драйвера шагового двигателя A4988 представляет собой коммутационную плату для микрошагового биполярного драйвера шагового двигателя Allegro A4988. Драйвер имеет регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также пять различных микрошагов (до 1/16 шага). Он работает от 8 до 35 В и может выдавать примерно до 1 А на фазу без радиатора или принудительного потока воздуха (он рассчитан на 2 А на катушку при достаточном дополнительном охлаждении).
Артикул: A4988G
Категории: — Управление двигателем, Электроника
Теги: A4988, Arduino, ЧПУ, щит, Драйвер шагового двигателя, Uno
Описание
Дополнительная информация
Описание
Держатель драйвера шагового двигателя A4988 представляет собой коммутационную плату для микрошагового биполярного драйвера шагового двигателя Allegro A4988.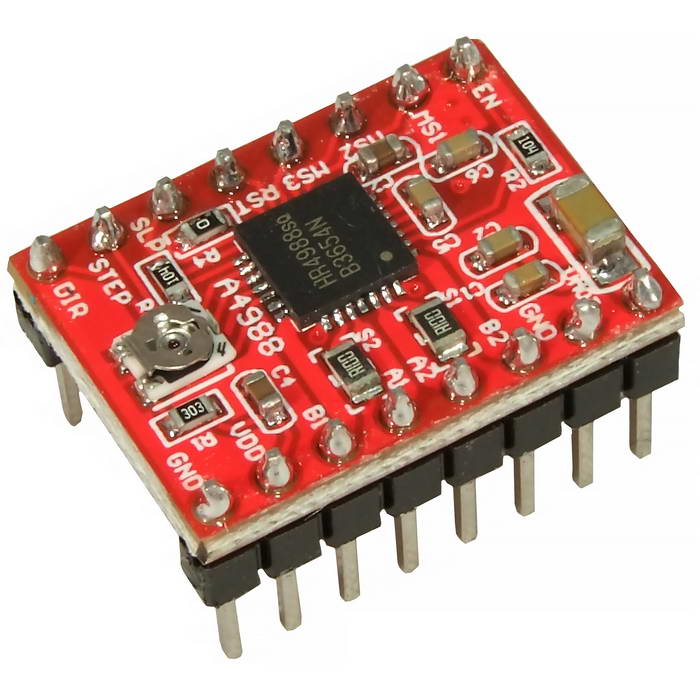 Драйвер имеет регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также пять различных микрошагов (до 1/16 шага). Он работает от 8 до 35 В и может выдавать примерно до 1 А на фазу без радиатора или принудительного потока воздуха (он рассчитан на 2 А на катушку при достаточном дополнительном охлаждении).
Драйвер имеет регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также пять различных микрошагов (до 1/16 шага). Он работает от 8 до 35 В и может выдавать примерно до 1 А на фазу без радиатора или принудительного потока воздуха (он рассчитан на 2 А на катушку при достаточном дополнительном охлаждении).
- Простой интерфейс управления шагом и направлением
- Пять различных шагов разрешения: полный шаг, полшага, четверть шага, восьмой шаг и шестнадцатый шаг
- Регулируемое управление током позволяет установить максимальный выходной ток с помощью потенциометра, что позволяет использовать напряжения выше номинального напряжения шагового двигателя для достижения более высокой частоты шагов
- Интеллектуальное управление прерыванием, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- Тепловое отключение при перегреве, блокировка при пониженном напряжении и защита от перегрузки по току
- Защита от короткого замыкания на землю и нагрузки
- Поставляется в комплекте с самоклеящимся радиатором.
Технические характеристики:
- Технические характеристики
- Минимальное рабочее напряжение: 8 В
- Максимальное рабочее напряжение: 35 В
- Непрерывный ток на фазу: 1 A
- Максимальный ток на фазу: 2 A
- Минимальное напряжение логики: 3 В
- Максимальное напряжение логики: 5,5 В
- Разрешение микрошага: 1, 1/2, 1/4, 1/8, 1/16
- Размер: 0,6″ × 0,8″
Комплектация:
- 1 x A4988 Драйвер шагового двигателя
- 1 радиатор с термолентой
Обратите внимание: Мы продаем предприятиям для оптового заказа, пожалуйста, свяжитесь с [email protected] для получения специальных цен на распространение.
Вам также может понравиться…
Распродажа!
ПРЕДЛОЖЕНИЕ ОГРАНИЧЕННОЕ ВРЕМЯ, НАШИ ВЫБОРЫ!
ЧПУ xPRO V5 – Концепции Spark
Устройство xPRO V5 с функцией plug and play предлагает передовые степпинги и мощность драйверов Trianamic, а также интерфейсы Wi-Fi и USB, все они работают на базе 32-битного процессора и заключены в красивый корпус из АБС-пластика (со встроенным охлаждением).
Просмотреть продукт
— Управление двигателем, — Переключатели и фитинги
Мини-двигатель постоянного тока ШИМ-регулятор скорости / светодиодный диммер
Этот мини-регулятор скорости двигателя постоянного тока регулирует скорость двигателя постоянного тока, регулируя широтно-импульсную модуляцию (ШИМ). Элемент в стиле Super Mini с новейшей технологией низкого напряжения.
Диапазон регулируемой скорости составляет 1%-100%. Включает предохранитель 30 В 2,5 А и с функцией защиты от обратного подключения источника питания. Он может использоваться не только для управления скоростью двигателя постоянного тока, но также …Посмотреть продукт
Электроника, — Управление двигателем
НАСТОЯЩИЙ драйвер шагового двигателя — TB6600 4A 40V
Наш TB6600 — это простой в использовании профессиональный драйвер шагового двигателя, который может управлять двухфазным шаговым двигателем.
Он совместим с Arduino и другими микроконтроллерами, которые могут выводить цифровой импульсный сигнал 5 В. Драйвер шагового двигателя TB6600 имеет широкий диапазон потребляемой мощности, питание от 9 до 42 В постоянного тока. И он способен выдавать пиковый ток 4А, чего достаточно для большинства…Посмотреть продукт
Электроника, — Экраны
Maker Shield — шилд, совместимый с Arduino Uno
Maker Shield — это универсальное решение GRB1.1 для управления ЧПУ, предназначенное для использования с Arduino® Uno и платами контроллеров , совместимыми с Uno. Этот шилд имеет 4 встроенных драйвера шагового двигателя DRV8825, что упрощает настройку и настройку вашей системы. Используйте этот экран в своих лазерных граверах, фрезерных станках с ЧПУ, плазменных резаках или любых робототехнических проектах…
Посмотреть продукт

 Он совместим с Arduino и другими микроконтроллерами, которые могут выводить цифровой импульсный сигнал 5 В. Драйвер шагового двигателя TB6600 имеет широкий диапазон потребляемой мощности, питание от 9 до 42 В постоянного тока. И он способен выдавать пиковый ток 4А, чего достаточно для большинства…
Он совместим с Arduino и другими микроконтроллерами, которые могут выводить цифровой импульсный сигнал 5 В. Драйвер шагового двигателя TB6600 имеет широкий диапазон потребляемой мощности, питание от 9 до 42 В постоянного тока. И он способен выдавать пиковый ток 4А, чего достаточно для большинства…A4988 Модуль драйвера шагового двигателя
Развернуть
Ссылка
9MDA4988
Условие:
Новый
Модуль драйвера шагового двигателя A4988 представляет собой коммутационную плату, способную управлять четырех-, шести- или восьмипроводным шаговым двигателем с пятью переменными микрошаговыми разрешениями.
Подробнее
96
Вещь
Предметы
Потратьте на 1000,00 руб. больше и получите бесплатную доставку!
Бесплатная доставка на сумму свыше 1000 рандов только для стандартной курьерской службы и в пределах Южной Африки
- Подробнее
- Отзывы
Модуль драйвера шагового двигателя A4988 был разработан как коммутационная плата, способная управлять шаговым двигателем с четырьмя, шестью или восемью проводами с пятью различными разрешениями микрошагов. Он может работать при токе до 2 А и напряжении от 8 до 35 В с радиатором и включает в себя защиту от перегрузки по току, блокировку при пониженном напряжении, а также защиту от перекрестных токов. Это позволяет ему работать вместе с другими частями и компонентами системы или как отдельный контроллер, реагирующий на команды пользователя или отдельной системы.
Плата использует микросхему A4988 и предлагает простой в использовании интерфейс выбора разрешения с микрошагом, в котором пользователи могут устанавливать разрешение, просто устанавливая эти резисторы на высокое или низкое значение. Различные комбинации высоких и низких результатов при разрешении полного шага, полушага, четверти шага, восьмого шага и шестнадцатого шага. Направление вращения двигателя также можно выбрать с помощью вывода DIR, который можно либо подключить к контроллеру для переключения между ними по желанию, либо просто напрямую привязать к VCC или GND, если необходимо только одно направление.
Различные комбинации высоких и низких результатов при разрешении полного шага, полушага, четверти шага, восьмого шага и шестнадцатого шага. Направление вращения двигателя также можно выбрать с помощью вывода DIR, который можно либо подключить к контроллеру для переключения между ними по желанию, либо просто напрямую привязать к VCC или GND, если необходимо только одно направление.
Радиатор включен для приложений с более высоким током и позволяет плате использовать до 2 А вместо стандартного 1 А. Он оснащен клейкой термоподложкой, так что нет необходимости в винтах или пайке, и вам просто нужно очистить чип и приклеить его.
Модуль драйвера шагового двигателя A4988 — Технические характеристики: | |
| – от 8 В до 35 В |
| – 1 А (макс. – 2 А (макс. с радиатором) |
| – от 3 В до 5,5 В |
| – Полный; 1/2; 1/4; 1/8; 1/16 |
| – в комплекте (с клейкой термоподложкой) |
| — Защита от перегрузки по току — Блокировка при пониженном напряжении – Автоматическое управление измельчением |
| – 15 х 20 мм |
| – 1,3 г |
 без радиатора)
без радиатора)
Модуль драйвера шагового двигателя A4988 — Таблица разрешений микрошагов: | |||
MS1 | MS2 | МС3 | Разрешение микрошага |
Низкий | Низкий | Низкий | Полный шаг |
Высокий | Низкий | Низкий | Полушаг |
Низкий | Высокий | Низкий | Четверть шага |
Высокий | Высокий | Низкий | Восьмой шаг |
Высокий | Высокий | Высокий | Шестнадцатый шаг |
Типичные области применения модуля драйвера шагового двигателя A4988:
Модуль драйвера шагового двигателя A4988 является одной из наиболее распространенных на рынке коммутационных плат для драйверов одного двигателя благодаря своей простоте и удивительной функциональности. Все эти функции, упакованные в недорогую плату с впечатляюще малым форм-фактором, гарантируют, что этот драйвер шагового двигателя является надежной инвестицией. И если вы действительно хотите получить хорошую производительность от этого драйвера, ознакомьтесь с текущим разделом ограничений на веб-сайте Pololu. Это просто для понимания и полезно для мейкеров, которые хотят получить максимальную отдачу от каждой инвестиции, которую они делают.
Все эти функции, упакованные в недорогую плату с впечатляюще малым форм-фактором, гарантируют, что этот драйвер шагового двигателя является надежной инвестицией. И если вы действительно хотите получить хорошую производительность от этого драйвера, ознакомьтесь с текущим разделом ограничений на веб-сайте Pololu. Это просто для понимания и полезно для мейкеров, которые хотят получить максимальную отдачу от каждой инвестиции, которую они делают.
30 других продуктов в той же категории:
Покупатели, купившие этот товар, также купили:
Οδηγός για Βηματικό Κινητήρα A4988
Этот продукт представляет собой плату-носитель или коммутационную плату для микрошагового драйвера Allegro A4988 DMOS с преобразователем и защитой от перегрузки по току, поэтому мы рекомендуем внимательно прочитать A49.88 перед использованием этого продукта. Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку. Вот некоторые из ключевых особенностей драйвера:
Вот некоторые из ключевых особенностей драйвера:
- Простой интерфейс управления шагом и направлением
- Пять различных шагов разрешения: полный шаг, полшага, четверть шага, восьмой шаг и шестнадцатый шаг
- Регулируемое управление током позволяет установить максимальный выходной ток с помощью потенциометра, что позволяет использовать напряжения выше номинального напряжения шагового двигателя для достижения более высокой частоты шагов
- Интеллектуальное управление прерыванием, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- Тепловое отключение при перегреве, блокировка при пониженном напряжении и защита от перегрузки по току
- Защита от короткого замыкания на землю и нагрузки
Этот продукт поставляется в индивидуальной упаковке с небольшим радиатором для микросхемы.
Некоторыми униполярными шаговыми двигателями (например, с шестью или восемью выводами) этот драйвер может управлять как биполярными шаговыми двигателями. Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Использование драйвера:
| Минимальная схема подключения микроконтроллера к шасси драйвера шагового двигателя A4988 (полношаговый режим). |
|---|
Соединения питания:
Драйверу требуется напряжение питания логики (3–5,5 В) для подключения к контактам VDD и GND, а также напряжение питания двигателя (8–35 В). через VMOT и GND. Эти источники питания должны иметь соответствующие развязывающие конденсаторы рядом с платой и должны обеспечивать ожидаемые токи (пики до 4 А для питания двигателя).
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к разрушающим LC скачкам напряжения, особенно при использовании проводов питания длиннее нескольких дюймов. При определенных условиях эти всплески могут превысить максимальное номинальное напряжение 35 В для A4988 и необратимо повредить плату, даже если напряжение питания двигателя составляет всего 12 В. Один из способов защитить драйвер от таких всплесков — поставить большой (не менее 47 мкФ) электролитический конденсатор по мощности двигателя (VMOT) и земле где-то рядом с платой.
При определенных условиях эти всплески могут превысить максимальное номинальное напряжение 35 В для A4988 и необратимо повредить плату, даже если напряжение питания двигателя составляет всего 12 В. Один из способов защитить драйвер от таких всплесков — поставить большой (не менее 47 мкФ) электролитический конденсатор по мощности двигателя (VMOT) и земле где-то рядом с платой.
Соединения двигателей:
Четырех-, шести- и восьмипроводные шаговые двигатели могут управляться A4988, если они правильно подключены.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может вывести его из строя. (В более общем случае переподключение чего-либо под напряжением вызывает проблемы.)
Размер шага (и микрошага):
Шаговые двигатели обычно имеют спецификацию размера шага (например, 1,8° или 200 шагов на оборот). который применяется к полным шагам. Микрошаговый драйвер, такой как A4988 позволяет получить более высокое разрешение за счет размещения промежуточных ступеней, что достигается за счет питания катушек промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
Входы селектора разрешения (размера шага) (MS1, MS2 и MS3) позволяют выбрать один из пяти шагов разрешения в соответствии с таблицей ниже. MS1 и MS3 имеют внутренние подтягивающие резисторы на 100 кОм, а MS2 имеет внутренний подтягивающий резистор на 50 кОм, поэтому отключение этих трех контактов выбора микрошага приводит к полношаговому режиму. Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
| MS1 | MS2 | MS3 | Разрешение микрошага |
|---|---|---|---|
| Низкое | Низкий | Низкий | Полный шаг |
| Высокий | Низкий | Низкий | Полушаг |
| Низкий | Высокий | Низкий | Четверть шага |
| Высокий | Высокий | Низкий | Восьмой шаг |
| Высокий | Высокий | Высокий | Шестнадцатый шаг |
Управляющие входы:
Каждый импульс на вход STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR.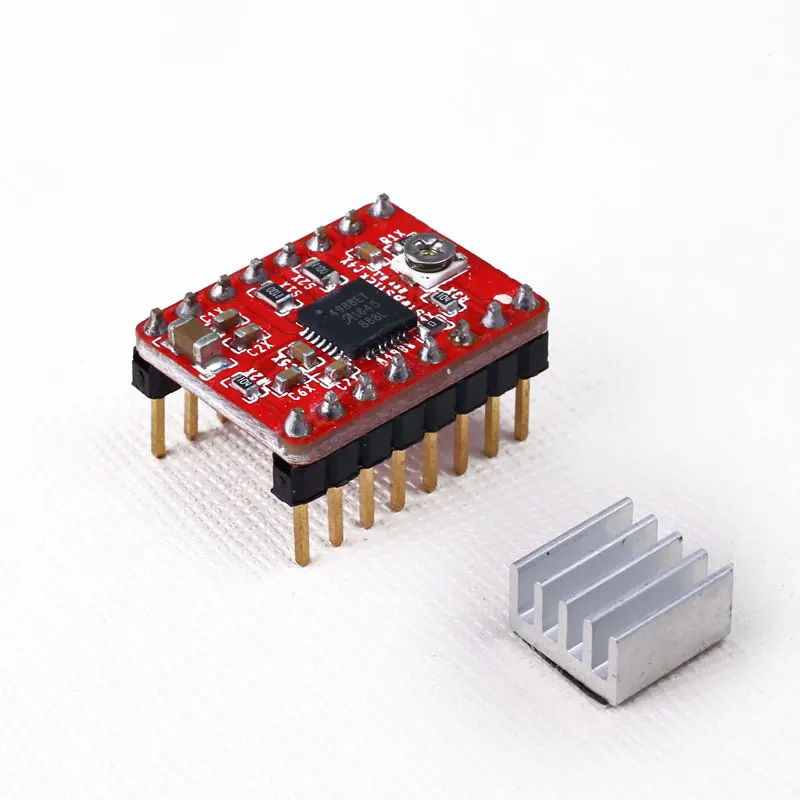 Обратите внимание, что выводы STEP и DIR не подключены к какому-либо определенному внутреннему напряжению, поэтому вы не должны оставлять ни один из этих выводов плавающим в своем приложении. Если вам просто нужно вращение в одном направлении, вы можете напрямую связать DIR с VCC или GND. Чип имеет три разных входа для управления многочисленными состояниями питания: RST, SLP и EN. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что контакт RST является плавающим; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы перевести его в высокий уровень и включить плату.
Обратите внимание, что выводы STEP и DIR не подключены к какому-либо определенному внутреннему напряжению, поэтому вы не должны оставлять ни один из этих выводов плавающим в своем приложении. Если вам просто нужно вращение в одном направлении, вы можете напрямую связать DIR с VCC или GND. Чип имеет три разных входа для управления многочисленными состояниями питания: RST, SLP и EN. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что контакт RST является плавающим; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы перевести его в высокий уровень и включить плату.
Ограничение тока:
Для достижения высокой скорости шага питание двигателя обычно намного выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А при сопротивлении катушки 5 Ом, что указывает на максимальное напряжение питания двигателя 5 В.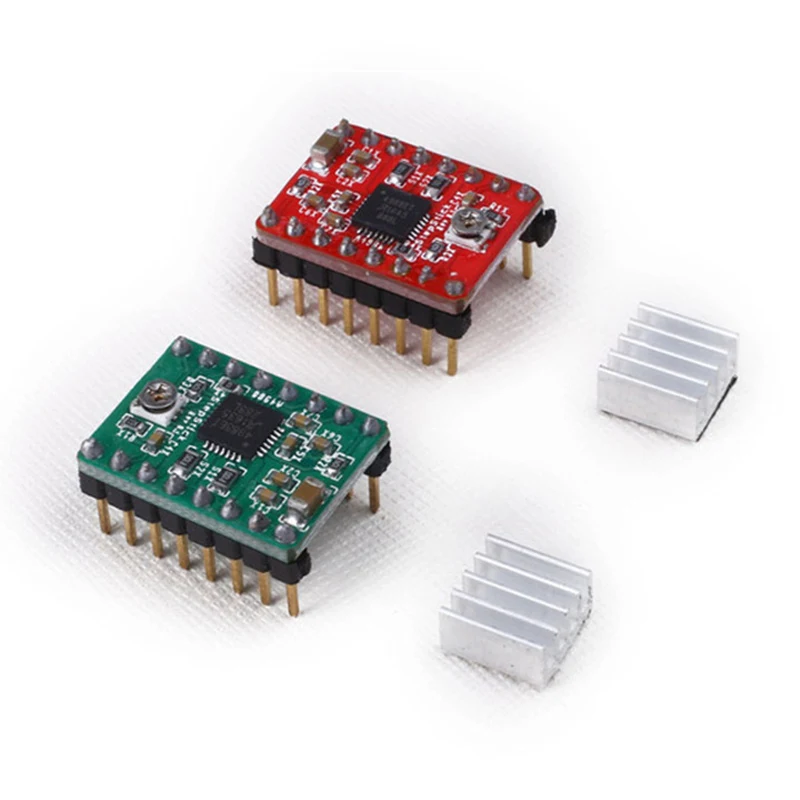 Использование такого двигателя с напряжением 12 В позволит увеличить скорость шага, но ток должен активно ограничивать до 1 А, чтобы предотвратить повреждение двигателя.
Использование такого двигателя с напряжением 12 В позволит увеличить скорость шага, но ток должен активно ограничивать до 1 А, чтобы предотвратить повреждение двигателя.
A4988 поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате можно использовать для установки ограничения тока. Один из способов установить ограничение тока — перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, без тактирования входа STEP. Измеренный ток будет в 0,7 раза превышать предел тока (поскольку обе катушки всегда включены и ограничены до 70% от установленного предела тока в полношаговом режиме). Обратите внимание, что изменение логического напряжения Vdd на другое значение изменит настройку ограничения тока, поскольку напряжение на выводе «ref» является функцией Vdd.
Другим способом установки ограничения тока является измерение напряжения на контакте «ref» и вычисление результирующего ограничения тока (резисторы измерения тока равны 0,05 Ом).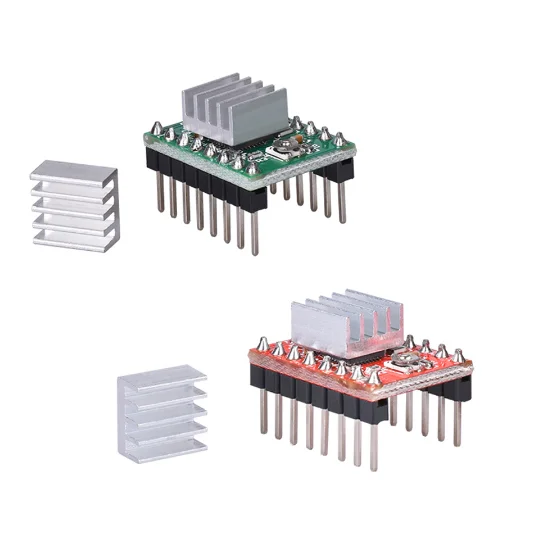 Напряжение опорного вывода доступно через переходное отверстие, обведенное кружком на нижней части печатной платы. Ограничение тока относится к опорному напряжению следующим образом:
Напряжение опорного вывода доступно через переходное отверстие, обведенное кружком на нижней части печатной платы. Ограничение тока относится к опорному напряжению следующим образом:
Предел тока = VREF × 2,5
Так, например, если опорное напряжение равно 0,3 В, ограничение тока равно 0,75 А. Как упоминалось выше, на полном шаге В этом режиме ток через катушки ограничен 70 % от предела тока, поэтому, чтобы получить ток катушки полного шага 1 А, предельный ток должен составлять 1 А/0,7 = 1,4 А, что соответствует VREF 1,4. A/2,5=0,56 В. См. A49.88 для получения дополнительной информации.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока. Подходящим местом для установки вашего амперметра является последовательное соединение с одной из катушек вашего шагового двигателя.
Соображения по рассеиваемой мощности:
ИС драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, но фактический ток, который вы можете обеспечить, зависит от того, насколько хорошо вы можете охлаждать ИС. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более приблизительно 1 А на катушку требуется радиатор или другой метод охлаждения.
Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более приблизительно 1 А на катушку требуется радиатор или другой метод охлаждения.
Этот продукт может нагреть до такой степени, что вы можете обжечься задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами.
Схема:
Pololu A4988 Держатель драйвера шагового двигателя
Держатель драйвера шагового двигателя A4988 представляет собой коммутационную плату для простого в использовании микрошагового биполярного драйвера шагового двигателя Allegro A4988. Это прямая замена версии A4983 (1518-005), но теперь она предлагает защиту от перегрузки по току и имеет внутренний подтягивающий резистор на выводе выбора микрошага MSI, но в остальном он идентичен.
Драйвер также имеет регулируемое ограничение тока и пять различных разрешений микрошагов. Драйвер работает от 8 до 35 В и может выдавать до 2 А на катушку. многие из наших клиентов используют эти драйверы в своих 3D-принтерах RepRap.
Обзор
Этот продукт представляет собой плату-носитель или переходную плату для микрошагового драйвера Allegro A4988 DMOS с транслятором; поэтому мы рекомендуем внимательно прочитать техническое описание A4988 (380k pdf) перед использованием этого продукта. Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку. Вот некоторые из ключевых особенностей драйвера:
Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку. Вот некоторые из ключевых особенностей драйвера:
* Простой интерфейс управления шагом и направлением
* Пять различных разрешений шага: полный шаг, полшага, четверть шага, восьмой шаг и шестнадцатый шаг
* Регулируемое управление током позволяет установить максимальный выходной ток с потенциометром, который позволяет вам использовать напряжения выше номинального напряжения вашего шагового двигателя для достижения более высоких скоростей шагов
* Интеллектуальное управление прерыванием, которое автоматически выбирает правильный режим затухания тока (быстрое затухание или медленное затухание)
* Тепловое отключение при перегреве, блокировка при пониженном напряжении и защита от перегрузки по току
* Защита от короткого замыкания на землю и короткого замыкания нагрузки (недоступно в версии A4983)
Включенное оборудование
Драйвер шагового двигателя A4988 Носитель поставляется с одним 1 × 16-контактным разъемным разъемом 0,1 дюйма. Разъемы могут быть припаяны для использования с непаянными макетными платами или разъемами 0,1 дюйма. Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате.
Разъемы могут быть припаяны для использования с непаянными макетными платами или разъемами 0,1 дюйма. Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате.
Использование драйвера
Силовые подключения
Драйвер требует, чтобы напряжение питания логики (3–5,5 В) было подключено к контактам VDD и GND, а напряжение питания двигателя (8–35 В) было подключено к контактам VMOT и GND. Эти источники питания должны иметь соответствующие развязывающие конденсаторы рядом с платой и должны обеспечивать ожидаемые токи (пики до 4 А для питания двигателя).
Соединения двигателя
Четырех-, шести- и восьмипроводные шаговые двигатели могут управляться A4988, если они правильно подключены.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может вывести его из строя. (В более общем случае замена проводки чего-либо под напряжением чревата проблемами. )
)
Размер шага (и микрошага)
Размер шага (и микрошага)
Шаговые двигатели обычно имеют спецификацию размера шага (например, 1,8° или 200 шагов на оборот), которая применяется к полным шагам. Микрошаговый драйвер, такой как A4983 позволяет получить более высокое разрешение за счет размещения промежуточных ступеней, что достигается за счет питания катушек промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
Входы селектора разрешения (размера шага) (M1, M2, M3) позволяют выбрать одно из пяти ступенчатых разрешений в соответствии с таблицей ниже. M2 и M3 имеют внутренние подтягивающие резисторы на 100 кОм, а M1 нет, поэтому его нужно подключать снаружи. Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет эффективно работать в полношаговом режиме.
| MS1 | МС2 | МС3 | Разрешение микрошага |
|---|---|---|---|
| Низкий | Низкий | Низкий | Полный шаг |
| Высокий | Низкий | Низкий | Полушаг |
| Низкий | Высокий | Низкий | Четверть шага |
| Высокий | Высокий | Низкий | Восьмой шаг |
Высокий | Высокий | Высокий | Шестнадцатый шаг |
Входы управления
Каждый импульс на вход STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR. Микросхема имеет три различных входа для управления многочисленными состояниями питания: RST, SLP и EN. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что контакт RST является плавающим; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате.
Ограничение тока
Для достижения высокой скорости шага питание двигателя обычно намного выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А при сопротивлении катушки 5 Ом, что соответствует максимальному напряжению питания двигателя 5 В. Использование такого двигателя с напряжением 12 В позволит увеличить скорость шага, но ток должен быть активно ограничен до значения менее 1 А, чтобы предотвратить повреждение двигателя.
A4988 поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате можно использовать для установки ограничения тока. Простой способ установить ограничение по току — перевести драйвер в полношаговый режим и измерить ток питания платы, не синхронизируя вход STEP. Измеренный ток будет в 1,4 раза превышать предельный ток (поскольку обе катушки всегда включены и ограничены 70% в полношаговом режиме). Обратите внимание, что ограничение тока зависит от напряжения Vdd.
Другой способ установить ограничение тока — измерить напряжение на контакте «ref» и рассчитать результирующее ограничение тока (резисторы измерения тока равны 0,05 Ом). Напряжение опорного вывода доступно через переходное отверстие, обведенное кружком на нижней части печатной платы.
Соображения по рассеиваемой мощности
ИС драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, но фактический ток, который вы можете обеспечить, зависит от того, насколько хорошо вы можете поддерживать охлаждение ИС. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более приблизительно 1 А на катушку требуется радиатор или другой метод охлаждения.
Этот продукт может нагреть до такой степени, что обожжет вас задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Обратите внимание, что измерение потребляемого тока в источнике питания не обязательно обеспечивает точное измерение тока катушки.