Содержание
Подключение трехфазного двигателя к однофазной сети без потери мощности
Главная
>
Энергетика
>
Подключение трехфазного двигателя к однофазной сети без потери мощности
Как известно, при включении трёхфазного асинхронного двигателя в однофазную сеть, по распространенным конденсаторным схемам: «треугольник», или «звезда», мощность двигателя используется только наполовину (в зависимости от применяемого двигателя).
Кроме того, затруднён запуск двигателя под нагрузкой.
В предлагаемой статье описан метод подключения двигателя без потери мощности.
В различных любительских электромеханических станках и приспособлениях чаще всего используются трехфазные асинхронные двигатели с короткозамкнутым ротором. К сожалению, трехфазная сеть в быту — явление крайне редкое, поэтому для их питания от обычной электрической сети любители применяют фазосдвигающий конденсатор, что не позволяет в полном объеме реализовать мощность и пусковые характеристики двигателя. Существующие же тринисторные «фазосдвигающие» устройства еще в большей степени снижают мощность на валу двигателей.
Существующие же тринисторные «фазосдвигающие» устройства еще в большей степени снижают мощность на валу двигателей.
Вариант схемы устройства запуска трехфазного электродвигателя без потери мощности приведен на рис. 1.
Обмотки двигателя 220/380 В соединены треугольником, а конденсатор С1 включен, как обычно, параллельно одной из них. Конденсатору «помогает» дроссель L1, включенный параллельно другой обмотке. При определенном соотношении емкости конденсатора С1, индуктивности дросселя L1 и мощности нагрузки можно получить сдвиг фаз между напряжениями на трех ветвях нагрузки, равный точно 120°.
На рис. 2 приведена векторная диаграмма напряжений для устройства, представленного на рис. 1, при чисто активной нагрузке R в каждой ветви. Линейный ток Iл в векторном виде равен разности токов Iз и Ia, а по абсолютному значению соответствует величине Iф√3, где Iф=I1=I2=I3=Uл/R — фазный ток нагрузки, Uл=U1=U2=U3=220 В — линейное напряжение сети.
К конденсатору С1 приложено напряжение Uc1=U2, ток через него равен Ic1 и по фазе опережает напряжение на 90°.
Аналогично к дросселю L1 приложено напряжение UL1=U3, ток через него IL1 отстает от напряжения на 90°.
При равенстве абсолютных величин токов Ic1 и IL1 их векторная разность при правильном выборе емкости и индуктивности может быть равной Iл.
Сдвиг фаз между токами Ic1 и IL1 составляет 60°, поэтому треугольник из векторов Iл, Iс1 и IL1 — равносторонний, а их абсолютная величина составляет Iс1=IL1=Iл=Iф√3. В свою очередь, фазный ток нагрузки Iф=Р/ЗUL, где Р — суммарная мощность нагрузки.
Иными словами, если емкость конденсатора С1 и индуктивность дросселя L1 выбрать такими, чтобы при поступлении на них напряжения 220 В ток через них был бы равен Ic1=IL1=P/(√3⋅Uл)=P/380, показанная на рис. 1 цепь L1C1 обеспечит на нагрузке трехфазное напряжение с точным соблюдением сдвига фаз.
Таблица 1
| P, Вт | IC1=IL1, A | C1, мкФ | L1, Гн |
|---|---|---|---|
| 100 | 0.26 | 3.8 | 2. 66 66 |
| 200 | 0.53 | 7.6 | 1.33 |
| 300 | 0.79 | 11.4 | 0.89 |
| 400 | 1.05 | 15.2 | 0.67 |
| 500 | 1.32 | 19.0 | 0.53 |
| 600 | 1.58 | 22.9 | 0.44 |
| 700 | 1.84 | 26.7 | 0.38 |
| 800 | 2.11 | 30.5 | 0.33 |
| 900 | 2.37 | 34.3 | 0.30 |
| 1000 | 2.63 | 38.1 | 0.27 |
| 1100 | 2.89 | 41.9 | 0.24 |
| 1200 | 3.16 | 45.7 | 0.22 |
| 1300 | 3.42 | 49.5 | 0.20 |
| 1400 | 3.68 | 53.3 | 0.19 |
| 1500 | 3.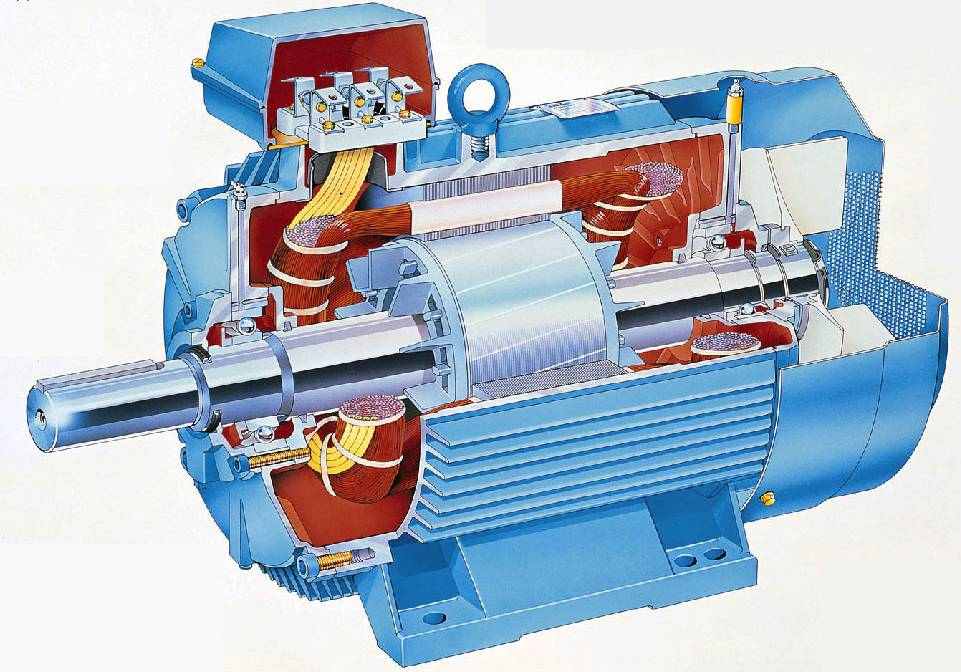 95 95 | 57.1 | 0.18 |
В табл. 1 приведены значения тока Ic1=IL1. емкости конденсатора С1 и индуктивности дросселя L1 для различных величин полной мощности чисто активной нагрузки.
Реальная нагрузка в виде электродвигателя имеет значительную индуктивную составляющую. В результате линейный ток отстает по фазе от тока активной нагрузки на некоторый угол ф порядка 20…40°.
На шильдиках электродвигателей обычно указывают не угол, а его косинус — широко известный cosφ, равный отношению активной составляющей линейного тока к его полному значению.
Индуктивную составляющую тока, протекающего через нагрузку устройства, показанного на рис. 1, можно представить в виде токов, проходящих через некоторые катушки индуктивности Lн, подключенные параллельно активным сопротивлениям нагрузки (рис. 3,а), или, что эквивалентно, параллельно С1, L1 и сетевым проводам.
Из рис. 3,б видно, что поскольку ток через индуктивность противофазен току через емкость, катушки индуктивности LH уменьшают ток через емкостную ветвь фазосдвигающей цепи и увеличивают через индуктивную. Поэтому для сохранения фазы напряжения на выходе фазосдвигающей цепи ток через конденсатор С1 необходимо увеличить и через катушку уменьшить
Поэтому для сохранения фазы напряжения на выходе фазосдвигающей цепи ток через конденсатор С1 необходимо увеличить и через катушку уменьшить
Векторная диаграмма для нагрузки с индуктивной составляющей усложняется. Ее фрагмент, позволяющий произвести необходимые расчеты, приведен на рис. 4.
Полный линейный ток Iл разложен здесь на две составляющие: активную Iлcosφ и реактивную Iлsinφ.
В результате решения системы уравнений для определения необходимых значений токов через конденсатор С1 и катушку L1:
IC1sin30° + IL1sin30° = Iлcosφ, IC1cos30° — IL1cos30° = Iлsinφ,
получаем следующие значения этих токов:
IC1 = 2/√3⋅Iлsin(φ+60°), IL1 = 2/√3⋅Iлcos(φ+30°).
При чисто активной нагрузке (φ=0) формулы дают ранее полученный результат Ic1=IL1=Iл.
На рис. 5 приведены зависимости отношений токов Ic1 и IL1 к Iл от cosφ, рассчитанные по этим формулам Для (cosφ = √3/2 = 0,87) ток конденсатора С1 максимален и равен 2/√3Iл = 1. 15Iл, а ток дросселя L1 вдвое меньше.
15Iл, а ток дросселя L1 вдвое меньше.
Этими же соотношениями с хорошей степенью точности можно пользоваться для типовых значений cosφ, равных 0,85…0,9.
Таблица 2
| P, Вт | IC1, A | IL1, A | C1, мкФ | L1, Гн |
|---|---|---|---|---|
| 100 | 0.35 | 0.18 | 5.1 | 3.99 |
| 200 | 0.70 | 0.35 | 10.2 | 2.00 |
| 300 | 1.05 | 0.53 | 15.2 | 1.33 |
| 400 | 1.40 | 0.70 | 20.3 | 1.00 |
| 500 | 1.75 | 0.88 | 25.4 | 0.80 |
| 600 | 2.11 | 1.05 | 30.5 | 0.67 |
| 700 | 2.46 | 1.23 | 35.6 | 0.57 |
| 800 | 2.81 | 1.40 | 40. 6 6 | 0.50 |
| 900 | 3.16 | 1.58 | 45.7 | 0.44 |
| 1000 | 3.51 | 1.75 | 50.8 | 0.40 |
| 1100 | 3.86 | 1.93 | 55.9 | 0.36 |
| 1200 | 4.21 | 2.11 | 61.0 | 0.33 |
| 1300 | 4.56 | 2.28 | 66.0 | 0.31 |
| 1400 | 4.91 | 2.46 | 71.1 | 0.29 |
| 1500 | 5.26 | 2.63 | 76.2 | 0.27 |
В табл. 2 приведены значения токов IC1, IL1, протекающих через конденсатор С1 и дроссель L1 при различных величинах полной мощности нагрузки, имеющей указанное выше значение cosφ = √3/2.
Для такой фазосдвигающей цепи используют конденсаторы МБГО, МБГП, МБГТ, К42-4 на рабочее напряжение не менее 600 В или МБГЧ, К42-19 на напряжение не менее 250 В.
Дроссель проще всего изготовить из трансформатора питания стержневой конструкции от старого лампового телевизора. Ток холостого хода первичной обмотки такого трансформатора при напряжении 220 В обычно не превышает 100 мА и имеет нелинейную зависимость от приложенного напряжения.
Если же в магнитопровод ввести зазор порядка 0,2…1 мм, ток существенно возрастет, а зависимость его от напряжения станет линейной.
Сетевые обмотки трансформаторов ТС могут быть соединены так, что номинальное напряжение на них составит 220 В (перемычка между выводами 2 и 2′), 237 В (перемычка между выводами 2 и 3′) или 254 В (перемычка между выводами 3 и 3′). Сетевое напряжение чаще всего подают на выводы 1 и 1′. В зависимости от вида соединения меняются индуктивность и ток обмотки.
В табл. 3 приведены значения тока в первичной обмотке трансформатора ТС-200-2 при подаче на нее напряжения 220 В при различных зазорах в магнитопроводе и разном включении секций обмоток.
Сопоставление данных табл. 3 и 2 позволяет сделать вывод, что указанный трансформатор можно установить в фазосдвигающую цепь двигателя с мощностью примерно от 300 до 800 Вт и, подбирая зазор и схему включения обмоток, получить необходимую величину тока.
3 и 2 позволяет сделать вывод, что указанный трансформатор можно установить в фазосдвигающую цепь двигателя с мощностью примерно от 300 до 800 Вт и, подбирая зазор и схему включения обмоток, получить необходимую величину тока.
Индуктивность изменяется также в зависимости от синфазного или противофазного соединения сетевой и низковольтных (например, накальных) обмоток трансформатора.
Максимальный ток может несколько превышать номинальный ток в рабочем режиме. В этом случае для облегчения теплового режима целесообразно снять с трансформатора все вторичные обмотки, часть низковольтных обмоток можно использовать для питания цепей автоматики устройства, в котором работает электродвигатель.
Таблица 3
| Зазор в магнитопроводе, мм | Ток в сетевой обмотке, A, при соединении выводов на напряжение, В | ||
|---|---|---|---|
| 220 | 237 | 254 | |
| 0.2 | 0.63 | 0. 54 54 | 0.46 |
| 0.5 | 1.26 | 1.06 | 0.93 |
| 1 | — | 2.05 | 1.75 |
В табл. 4 приведены номинальные величины токов первичных обмоток трансформаторов различных телевизоров и ориентировочные значения мощности двигателя, с которыми их целесообразно использовать фазосдвигающую LC-цепь следует рассчитывать для максимально возможной нагрузки электродвигателя.
Таблица 4
| Трансформатор | Номинальный ток, A | Мощность двигателя, Вт |
|---|---|---|
| ТС-360М | 1.8 | 600…1500 |
| ТС-330К-1 | 1.6 | 500…1350 |
| СТ-320 | 1.6 | 500…1350 |
| СТ-310 | 1.5 | 470…1250 |
| ТСА-270-1, ТСА-270-2, ТСА-270-3 | 1.25 | 400…1250 |
| ТС-250, ТС-250-1, ТС-250-2, ТС-250-2М, ТС-250-2П | 1. 1 1 | 350…900 |
| ТС-200К | 1 | 330…850 |
| ТС-200-2 | 0.95 | 300…800 |
| ТС-180, ТС-180-2, ТС-180-4, ТС-180-2В | 0.87 | 275…700 |
При меньшей нагрузке необходимый сдвиг фаз уже не будет выдерживаться, но пусковые характеристики по сравнению с использованием одного конденсатора улучшатся.
Экспериментальная проверка проводилась как с чисто активной нагрузкой, так и с электродвигателем.
Функции активной нагрузки выполняли по две параллельно соединенных лампы накаливания мощностью 60 и 75 Вт, включенные в каждую нагрузочную цепь устройства (см рис. 1), что соответствовало общей мощности 400 Вт В соответствии с табл. 1 емкость конденсатора С1 составляла 15 мкф Зазор в магнитопроводе трансформатора ТС-200-2 (0,5 мм) и схема соединения обмоток (на 237 В) были выбраны из соображений обеспечения необходимого тока 1,05 А.
Измеренные на нагрузочных цепях напряжения U1, U2, U3 отличались друг от друга на 2…3 В, что подтверждало высокую симметрию трехфазного напряжения.
Эксперименты проводились также с трехфазным асинхронным двигателем с короткозамкнутым ротором АОЛ22-43Ф мощностью 400 Вт. Он работал с конденсатором С1 емкостью 20 мкф (кстати, такой же, как и при работе двигателя только с одним фазосдвигающим конденсатором) и с трансформатором, зазор и соединение обмоток которого выбраны из условия получения тока 0,7 А.
В результате удалось быстро запустить двигатель без пускового конденсатора и заметно увеличить крутящий момент, ощущаемый при торможении шкива на валу двигателя.
К сожалению, провести более объективную проверку затруднительно, поскольку в любительских условиях практически невозможно обеспечить нормированную механическую нагрузку на двигатель.
Следует помнить, что фазосдвигающая цепь — это последовательный колебательный контур, настроенный на частоту 50 Гц (для варианта чисто активной нагрузки), и без нагрузки подключать к сети эту цепь нельзя.
Пресс-центр компании «Диполь»
4 февраля 2018
подписаться
подписаться
В промышленности электродвигатели используются повсеместно, они становятся технически все сложнее, что часто может осложнять поддержание их работы на пике эффективности. Важно помнить, что причины неисправностей электродвигателей и приводов не ограничиваются одной областью специализации: они могут быть как механического, так и электрического характера. И только нужные знания разделяют дорогостоящий простой и продление срока службы.
Наиболее частые неисправности электродвигателей — повреждения изоляции обмоток и износ подшипников, возникающие по множеству разных причин. Эта статья посвящена заблаговременному обнаружению 13 наиболее распространенных причин повреждений изоляции и выхода из строя подшипников.
Качество электроэнергии
1. Переходное напряжение
2. Асимметрия напряжений
Асимметрия напряжений
3. Гармонические искажения
Частотно-регулируемые приводы
4. Отражения на выходных ШИМ-сигналах привода
5. Среднеквадратичное отклонение тока
6. Рабочие перегрузки
Механические причины
7. Нарушение центрирования
8. Дисбаланс вала
9. Расшатанность вала
10. Износ подшипника
Факторы, связанные с неправильной установкой
11. Неплотно прилегающее основание
12. Напряжение трубной обвязки
13. Напряжение на валу
Качество электроэнергии
1. Переходное напряжение
Переходные напряжения могут происходить из множества источников как на самом предприятии, так и за его пределами. Включение и выключение нагрузки поблизости, батареи конденсаторов коррекции коэффициента мощности или даже погодные явления — все это может создавать переходные напряжения в распределительных сетях. Эти процессы с произвольной амплитудой и частотой могут разрушать или повреждать изоляцию обмоток электродвигателей.
Обнаружение источника переходных процессов может оказаться сложной задачей, поскольку они происходят нерегулярно, а их последствия могут проявляться по-разному. Например, переходные процессы могут проявиться в контрольных кабелях и необязательно нанесут вред непосредственно оборудованию, но они могут нарушить его работу.
Воздействие: повреждение изоляции обмотки электродвигателя приводит к раннему возникновению неисправностей и незапланированному простою.
Прибор для измерения и диагностики: трехфазный анализатор качества электроэнергии Fluke 435-II.
Критичность: высокая.
2. Асимметрия напряжений
Трехфазные распределительные сети часто питают однофазные нагрузки. Асимметрия сопротивления или нагрузки может быть причиной асимметрии напряжений на всех трех фазах. Возможные неисправности могут находиться в проводке электродвигателя, на клеммах электродвигателя, а также в самих обмотках. Эта асимметрия может вызывать перегрузки в каждой фазной цепи трехфазной сети. Одним словом, напряжение на всех трех фазах всегда должно быть одинаковым.
Эта асимметрия может вызывать перегрузки в каждой фазной цепи трехфазной сети. Одним словом, напряжение на всех трех фазах всегда должно быть одинаковым.
Воздействие: асимметрия является причиной сверхтоков в одной или нескольких фазах, которые вызывают перегрев и повреждение изоляции.
Инструмент для измерения и диагностики: трехфазный анализатор качества электроэнергии Fluke 435-II.
Критичность: средняя.
3. Гармонические искажения
Проще говоря, гармоники — это любые нежелательные дополнительные высокочастотные колебания напряжения или тока, поступающие на обмотки электродвигателя. Эта дополнительная энергия не используется для вращения вала электродвигателя, а циркулирует в обмотках и в конечном итоге приводит к потере внутренней энергии. Эти потери рассеиваются в виде тепла, которое со временем ухудшает изолирующие свойства обмоток. Некоторые гармонические искажения формы тока являются нормой для систем, питающих электронную нагрузку. Гармонические искажения можно измерить с помощью анализатора качества электроэнергии, проконтролировав величины токов и температуры на трансформаторах и убедившись, что они не перегружены. Для каждой гармоники утвержден приемлемый уровень искажений, который регламентируется стандартом IEEE 519-1992.
Гармонические искажения можно измерить с помощью анализатора качества электроэнергии, проконтролировав величины токов и температуры на трансформаторах и убедившись, что они не перегружены. Для каждой гармоники утвержден приемлемый уровень искажений, который регламентируется стандартом IEEE 519-1992.
Воздействие: снижение эффективности электродвигателя приводит к дополнительным расходам и увеличению рабочей температуры.
Инструмент для измерения и диагностики: трехфазный анализатор качества электроэнергии Fluke 435-II.
Критичность: средняя.
Частотно-регулируемые приводы
4. Отражения на выходных ШИМ-сигналах привода
Частотно-регулируемые приводы используют широтно-импульсную модуляцию (ШИМ) для управления выходным напряжением и частотой питания электродвигателя. Отражения возникают из-за несогласованности полных сопротивлений источника и нагрузки. Несогласованность полных сопротивлений может произойти в результате неправильной установки, неправильного выбора компонентов или ухудшения состояния оборудования со временем. Пик отражения в цепи электропривода может достигать уровня напряжения шины постоянного тока.
Несогласованность полных сопротивлений может произойти в результате неправильной установки, неправильного выбора компонентов или ухудшения состояния оборудования со временем. Пик отражения в цепи электропривода может достигать уровня напряжения шины постоянного тока.
Воздействие: повреждение изоляции обмотки электродвигателя приводит к незапланированному простою.
Прибор для измерения и диагностики: Fluke 190-204 ScopeMeter® , 4-канальный портативный осциллограф с высокой частотой выборки.
Критичность: высокая.
5. Среднеквадратичное отклонение тока
По своей сути среднеквадратичное отклонение тока — это паразитные токи, циркулирующие в системе. Среднеквадратичное отклонение тока образуется как результат частоты сигнала, уровня напряжения, емкости и индуктивности в проводниках. Эти циркулирующие токи могут выйти через системы защитного заземления, вызывая ложное размыкание или, в некоторых случаях, нагревание обмотки. Среднеквадратичное отклонение тока можно обнаружить в проводке электродвигателя, это сумма тока с трех фаз в любой момент времени. В идеальной ситуации сумма этих трех токов должна равняться нулю. Иными словами, обратный ток от привода будет равняться току, поступающему на привод. Среднеквадратичное отклонение тока можно также представить в виде асимметричных сигналов в нескольких проводниках, имеющих емкостную связь с заземляющим проводником.
Среднеквадратичное отклонение тока можно обнаружить в проводке электродвигателя, это сумма тока с трех фаз в любой момент времени. В идеальной ситуации сумма этих трех токов должна равняться нулю. Иными словами, обратный ток от привода будет равняться току, поступающему на привод. Среднеквадратичное отклонение тока можно также представить в виде асимметричных сигналов в нескольких проводниках, имеющих емкостную связь с заземляющим проводником.
Воздействие: произвольное размыкание цепи из-за прохождения тока по защитному заземлению.
Прибор для измерения и диагностики: изолированный 4-канальный портативный осциллограф Fluke 190-204 ScopeMeter с широкополосными (10 кГц) токовыми клещами (Fluke i400S или аналогичные).
Критичность: низкая.
6. Рабочие перегрузки
Перегрузка электродвигателя возникает, когда он работает под повышенной нагрузкой. Основными признаками перегрузки электродвигателя являются чрезмерное потребление тока, недостаточный крутящий момент и перегрев. Избыточное тепловыделение электродвигателя является главной причиной его неисправности. При перегрузке электродвигателя его отдельные компоненты — включая подшипники, обмотки и другие части — могут работать нормально, но электродвигатель будет перегреваться. Поэтому начинать поиски неисправности следует с проверки именно перегруженности электродвигателя. Поскольку 30% всех неисправностей электродвигателей происходят именно из-за их перегруженности, важно понимать, как измерять и определять перегрузку электродвигателя.
Избыточное тепловыделение электродвигателя является главной причиной его неисправности. При перегрузке электродвигателя его отдельные компоненты — включая подшипники, обмотки и другие части — могут работать нормально, но электродвигатель будет перегреваться. Поэтому начинать поиски неисправности следует с проверки именно перегруженности электродвигателя. Поскольку 30% всех неисправностей электродвигателей происходят именно из-за их перегруженности, важно понимать, как измерять и определять перегрузку электродвигателя.
Воздействие: преждевременный износ электрических и механических компонентов электродвигателя, ведущий к необратимому выходу из строя.
Инструмент для измерения и диагностики: цифровой мультиметр Fluke 289.
Критичность: высокая.
7. Нарушение центрирования
Нарушение центрирования возникает при неправильном выравнивании вала привода относительно нагрузки или смещении передачи, которая их соединяет. Многие специалисты считают, что гибкое соединение устраняет и компенсирует смещение, тем не менее, гибкое соединение защищает от смещения только саму передачу. Даже с гибким соединением не отцентрированный вал будет передавать повреждающие циклические усилия по своей длине на электродвигатель, вызывая повышенный износ электродвигателя и увеличивая фактическую механическую нагрузку. Кроме того, нарушение центрирования может быть причиной вибрации валов как нагрузки, так и электропривода. Существует несколько типов нарушения центрирования:
Многие специалисты считают, что гибкое соединение устраняет и компенсирует смещение, тем не менее, гибкое соединение защищает от смещения только саму передачу. Даже с гибким соединением не отцентрированный вал будет передавать повреждающие циклические усилия по своей длине на электродвигатель, вызывая повышенный износ электродвигателя и увеличивая фактическую механическую нагрузку. Кроме того, нарушение центрирования может быть причиной вибрации валов как нагрузки, так и электропривода. Существует несколько типов нарушения центрирования:
- Угловое смещение: оси валов пересекаются, но не параллельны;
- Параллельное смещение: оси валов параллельны, но не соосны;
- Сложное смещение: сочетание углового и параллельного смещений. (Примечание: практически всегда нарушение центрирования является сложным, но практикующие специалисты рассматривают их как сумму составляющих смещений, поскольку устранять нарушение центрирования проще по отдельности — угловую и параллельную составляющие).


Влияние: преждевременный износ механических компонентов привода, вызывающий преждевременные неисправности.
Прибор для измерения и диагностики: лазерный инструмент для центрирования вала Fluke 830.
Критичность: высокая.
8. Дисбаланс вала
Дисбаланс — это состояние вращающейся детали, когда центр масс расположен не на оси вращения. Иными словами, когда центр тяжести находится где-то на роторе. Хотя устранить дисбаланс двигателя полностью невозможно, можно определить, не выходит ли он за рамки приемлемых значений, и предпринять меры для исправления ситуации.
Дисбаланс может быть вызван различными причинами:
- скопление грязи;
- отсутствие балансировочных грузов;
- отклонения при производстве;
- неравная масса обмоток двигателя и другие факторы, связанные с износом.
Тестер или анализатор вибрации поможет определить, сбалансирован вращающийся механизм или нет.
Влияние: преждевременный износ механических компонентов привода, вызывающий преждевременные неисправности.
Прибор для измерения и диагностики: измеритель вибрации Fluke 810.
Критичность: высокая.
9. Расшатанность вала
Расшатанность возникает из-за чрезмерного зазора между деталями. Расшатанность может возникать в нескольких местах:
- Расшатанность с вращением возникает из-за чрезмерного зазора между вращающимися и неподвижными частями машины, например, в подшипнике.
- Расшатанность без вращения возникает между двумя обычно неподвижными деталями, например, между опорой и основанием или корпусом подшипника и машиной.
Как и в случаях со всеми другими источниками вибрации, важно уметь определить расшатанность и устранить проблему, избежав убытков. Определить наличие расшатанности во вращающейся машине можно с помощью тестера или анализатора вибрации.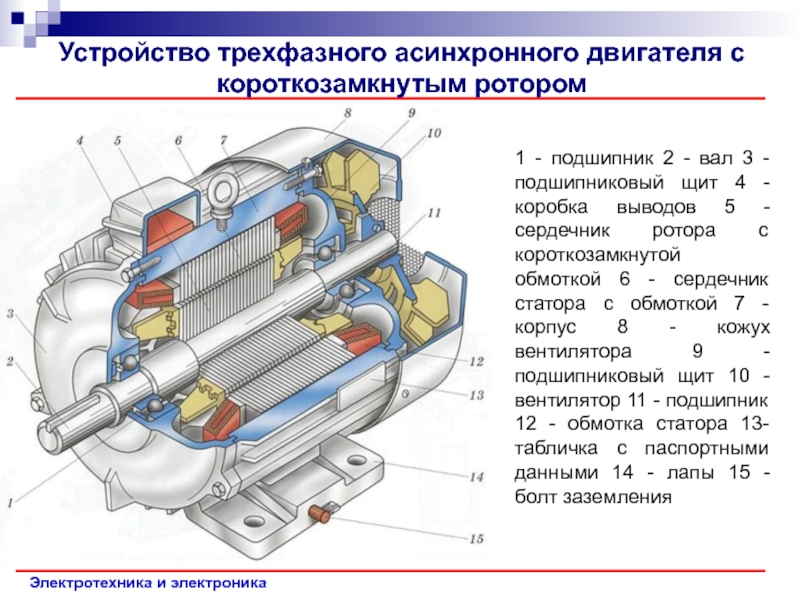
Влияние: ускоренный износ вращающихся компонентов, вызывающий механические неисправности.
Прибор для измерения и диагностики: измеритель вибрации Fluke 810.
Критичность: высокая.
10. Износ подшипника
Неисправный подшипник имеет повышенное трение, сильнее нагревается и имеет пониженную эффективность из-за механических проблем, проблем со смазкой или износа. Неисправность подшипника может быть следствием различных факторов:
- нагрузка, превышающая расчетную;
- недостаточная или неправильная смазка;
- неэффективная герметизация подшипника;
- нарушение центрирования вала;
- неправильная установка;
- нормальный износ;
- наведенное напряжение на валу.
Когда неисправности подшипников начинают проявляться, это также вызывает каскадный эффект, ускоряющий выход двигателя из строя. 13% неисправностей двигателя вызваны неисправностями подшипников, и более 60 % механических неисправностей на предприятии вызваны износом подшипников, поэтому важно знать, как устранять эти потенциальные проблемы.
13% неисправностей двигателя вызваны неисправностями подшипников, и более 60 % механических неисправностей на предприятии вызваны износом подшипников, поэтому важно знать, как устранять эти потенциальные проблемы.
Влияние: ускоренный износ вращающихся компонентов приводит к выходу подшипников из строя.
Прибор для измерения и диагностики: измеритель вибрации Fluke 810.
Критичность: высокая.
Факторы, связанные с неправильной установкой
11. Неплотно прилегающее основание
Неплотное прилегание вызывается неровным монтажным основанием двигателя или приводимого в движение компонента или неровной монтажной поверхностью, на которой располагается монтажное основание. Данное состояние может создать неприятную ситуацию, при которой затяжка монтажных болтов на самом деле привносит новые нагрузки и нарушение центрирования. Неплотное прилегание опоры часто возникает между двумя диагонально расположенными крепежными болтами, как, например, в случае с неровным стулом или столом, которые раскачиваются по диагонали. Существуют два типа неплотного прилегания основания:
Существуют два типа неплотного прилегания основания:
- Параллельное неплотное прилегание основания —возникает, когда одна монтажная опора расположена выше, чем три другие;
- Угловое неплотное прилегание основания —возникает, когда одна из монтажных опор не параллельна или не перпендикулярна по отношению к монтажной поверхности.
В обоих случаях неплотное прилегание основания может быть вызвано неровностями в монтажной опоре механизма или в монтажном основании, на котором находится опора. В любом случае найти и устранить неплотное прилегание необходимо до центрирования вала. Качественный лазерный инструмент для центрирования может определить неплотное прилегание основания данной вращающейся машины.
Влияние: нарушение центрирования компонентов механического привода.
Прибор для измерения и диагностики: лазерный инструмент для центрирования вала Fluke 830.
Критичность: средняя.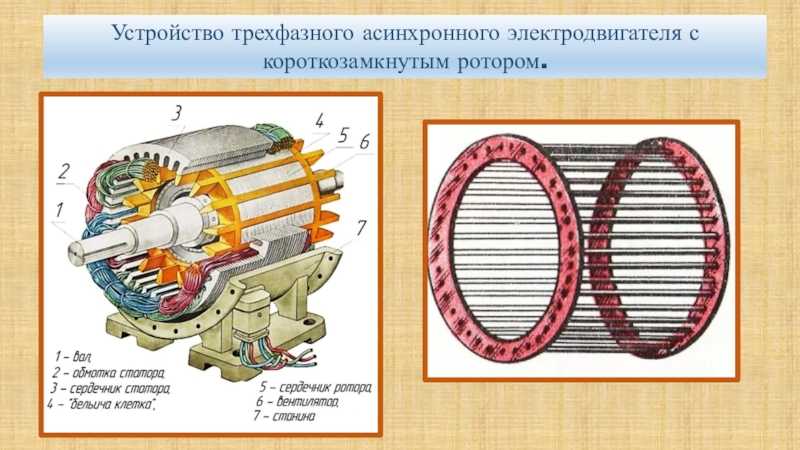
12. Напряжение трубной обвязки
Натяжением трубной обвязки называется состояние, при котором новые нагрузки, натяжения и силы, действующие на остальное оборудование и инфраструктуру, передаются назад на двигатель и привод, приводя к нарушению центрирования. Наиболее часто встречающимся примером этого являются простые схемы с электродвигателем/насосом, когда что-то оказывает воздействие на трубопроводы, например:
- смещение в фундаменте;
- недавно установленный клапан или другой компонент;
- предмет, ударяющий, сгибающий или просто давящий на трубу;
- сломанные или отсутствующие крепления для труб или настенная арматура.
Эти силы могут оказывать угловое или смещающее воздействие, что в свою очередь приводит к смещению вала двигателя/насоса. По этой причине важно проверять центрирование машины не только во время установки — точное центрирование является временным состоянием и может изменяться с течением времени.
Влияние: нарушение центрирования вала и последующие нагрузки на вращающиеся компоненты, приводящие к преждевременным неисправностям.
Прибор для измерения и диагностики: лазерный инструмент для центрирования вала Fluke 830.
Критичность: низкая.
13. Напряжение на валу
Когда напряжение на валу электродвигателя превышает изолирующие характеристики смазки подшипника, происходит пробой на внешний подшипник, что вызывает точечную коррозию и образование канавок на дорожке качения подшипника. Первыми признаками проблемы являются шум и перегрев, возникающие по мере того, как подшипники теряют первоначальную форму, а также появление металлической крошки в смазке и увеличение трения подшипника. Это может привести к разрушению подшипника уже через несколько месяцев работы электродвигателя. Неисправность подшипника — это дорогостоящая проблема как с точки зрения восстановления электродвигателя, так и с точки зрения простоя оборудования, поэтому предотвращение этого посредством измерения напряжения на валу и тока в подшипниках является важной частью диагностики.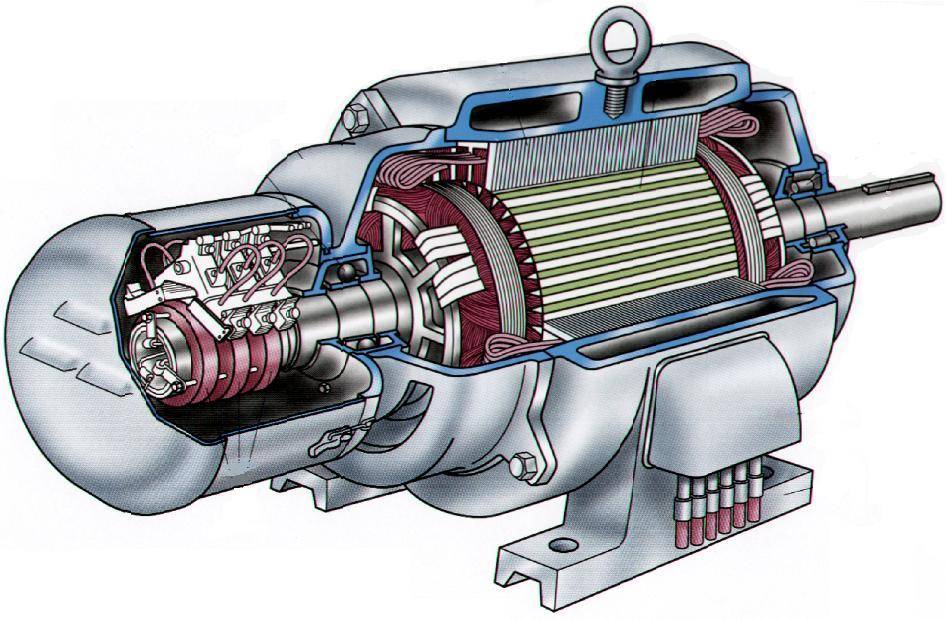 Напряжение на валу присутствует только тогда, когда на двигатель подается питание, и он вращается. Угольная щетка, устанавливаемая на щуп, позволяет измерять напряжение на валу при вращении электродвигателя.
Напряжение на валу присутствует только тогда, когда на двигатель подается питание, и он вращается. Угольная щетка, устанавливаемая на щуп, позволяет измерять напряжение на валу при вращении электродвигателя.
Влияние: дуговые разряды на поверхности подшипника вызывают точечную коррозию и образование канавок, что в свою очередь приводит к чрезмерной вибрации и последующей неисправности подшипника.
Прибор для измерения и диагностики: изолированный 4-канальный портативный осциллограф Fluke-190-204 ScopeMeter, щуп AEGIS с угольными щетками для измерения напряжения на валу.
Критичность: высокая.
Четыре стратегии для достижения успеха
Системы управления электродвигателями используются в важных процессах на заводах. Поломка оборудования может привести к большим финансовым потерям, связанным как с потенциальной заменой электродвигателя и его деталей, так и с простоем систем, зависящих от данного электродвигателя. Обеспечивая обслуживающих инженеров и техников необходимыми знаниями, определяя приоритеты работ и проводя профилактическое обслуживание для контроля оборудования и устранения трудно обнаруживаемых проблем, зачастую можно избежать неисправностей, вызванных рабочими нагрузками, и сократить потери от простоя.
Обеспечивая обслуживающих инженеров и техников необходимыми знаниями, определяя приоритеты работ и проводя профилактическое обслуживание для контроля оборудования и устранения трудно обнаруживаемых проблем, зачастую можно избежать неисправностей, вызванных рабочими нагрузками, и сократить потери от простоя.
Существуют четыре ключевые стратегии для устранения или предотвращения преждевременных поломок электродвигателя и вращающихся деталей:
- Запись рабочих условий, технических характеристик оборудования и диапазонов допусков рабочих характеристик.
- Регулярный сбор и запись критических измерений при установке, до и после технического обслуживания.
- Создание архива эталонных измерений для анализа тенденций и обнаружения изменения состояния.
- Построение графиков отдельных измерений для выявления основных тенденций.Любые изменения в линии тенденций более чем на +/- 10-20% (или любую другую определенную величину, в зависимости от эксплуатационных характеристик или критичности системы) необходимо исследовать для выявления причин возникновения проблем.

Китай Производство: Производитель электродвигателей, Генератор переменного тока, Продажа: Поставщик генераторных установок
Электродвигатели
Свяжитесь сейчас
GIF
Свяжитесь сейчас
Свяжитесь сейчас
GIF
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Генераторы / Генераторы
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
GIF
Свяжитесь сейчас
Морской двигатель / Морская коробка передач
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Видео
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Набор Gemeraor для промышленных и морских дизельных двигателей
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Свяжитесь сейчас
Профиль компании
{{ util. each(imageUrls, функция(imageUrl){}}
each(imageUrls, функция(imageUrl){}}
{{ }) }}
{{ если (изображениеUrls.length > 1){ }}
{{ } }}
| Вид бизнеса: | Производитель/Фабрика | |
| Основные продукты: | Производство: Электродвигатель , Генератор , Продажи: генераторная установка , Помпа | |
| Количество работников: | 40 | |
| Год основания: | 2009-07-01 | |
| Сертификация системы менеджмента: | ИСО9001:2008 | |
| Среднее время выполнения: | Время выполнения в пиковый сезон: один месяц Время выполнения в межсезонье: один месяц |
Информация отмечена
проверяется
СГС
FUAN TONGBO ELECTRICAL MACHINERY CO. Ltd. была основана 1 июля 2009 года в городе Фуань, «городе электрических машин», как экспортно-ориентированный производитель электродвигателей, генераторов переменного тока и генераторных установок. Мы также занимаемся всеми видами судовых и промышленных двигателей, судовых коробок передач и их частей и т. д.
Ltd. была основана 1 июля 2009 года в городе Фуань, «городе электрических машин», как экспортно-ориентированный производитель электродвигателей, генераторов переменного тока и генераторных установок. Мы также занимаемся всеми видами судовых и промышленных двигателей, судовых коробок передач и их частей и т. д.
Наш собственный бренд «TONG BO» состоит из различных моделей двигателей, перечисленных ниже:
1. Трехфазный асинхронный двигатель — серия Y, серия Y2, серия AEEF и т. д.
2. Однофазный асинхронный двигатель —YC …
Посмотреть все
Пошлите Ваше сообщение этому продавцу
* От:
* Кому:
Мистер Ар. Т
* Сообщение:
Введите от 20 до 4000 символов.
Это не то, что вы ищете?
Опубликовать запрос на поставку сейчас
трехфазный асинхронный двигатель
трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель питается от трехфазной сети.
натяжения, то есть три натяжения, смещенные друг относительно друга на 120.
Звезда напряжения трехфазной системы |
Напряжение питания трехфазной системы 400 В в
эффективное значение, при частоте f = 50 Гц
Неподвижная часть двигателя называется
.
статор и часть, которая
может вращать указанный ротор.
На неподвижной части двигателя, статоре, имеются три
двойной
обмотки
, которые устроены
относительно друг друга на 120.
трехфазный асинхронный двигатель |
Эти
обмотки
питаются от трехфазного напряжения; поэтому охватываются определенным
тока, и происходит это при переменном магнитном поле, создаваемом каждым из
три обмотки
.
В районе между тремя
обмотки
магнитное поле будет суммой трех магнитных полей трех
обмотки
.
Но так как
обмотки
соединены на статоре с механическим углом 120, а также
трехфазная система напряжений также находится в противофазе с электрической точкой
поля зрения на угол, равный 120 электрическим градусам, магнитное поле, найденное
не будет фиксированным, но будет переменным; это магнитное поле вращается вокруг
ось двигателя с фиксированной частотой:
ф
=50 Гц
Об этом магнитном поле говорят
вращающееся магнитное поле
Если в пределах этих
обмоток поставить
другая обмотка в коротком замыкании на роторе из-за магнитного потока, который
связанная с обмотками ротора, рождается индуцированная электродвижущая сила,
Закон Фарадея, который противостоит породившей причине.
короткозамкнутый ротор |
Так как обмотки на ротор делать надо коротко
цепь и, следовательно, должен нести большой ток, должен иметь высокое сечение, для
алюминиевые стержни предпочтительно намотать на ферромагнитный сердечник.
материал, состоящий из слоев кремния.
Таким образом, алюминиевые стержни, закрытые
короткое замыкание ведет себя как набор из нескольких витков, каждый из которых имеет приподнятую секцию,
чтобы выдерживать высокие токи короткого замыкания.
Эти токи возникают из-за напряжения, которое
генерируется в стержнях по закону Фарадея, так как магнитное поле
создаваемая статором переменная.
Эти токи порождают еще один вращающийся
магнитное поле, создаваемое на роторе;
это магнитное поле имеет противоположное направление
который генерируется статором.
Следовательно, ротор, в отличие от магнитного
поле статора вынуждено приходит в движение, а затем вращается с такой же
скорость вращающегося магнитного поля статора.
Ротор не вращается с постоянной скоростью, т.е.
скорость синхронизма, но замедляется при изменении нагрузки;
поэтому двигатель не синхронный, а
асинхронный сказал, что не соблюдает синхронную скорость, установленную
статор.
Действительно, синхронная скорость вращающегося магнитного поля
статора составляет, в случае одной полярной пары ротора:
н с = 60 ф
где
п с
это количество оборотов
в минуту, то есть синхронная скорость, и
f – частота.
Ротор вращается со скоростью менее
n с
;
обозначим через
n r
скорость ротора.
Рассмотрим разницу:
н с
— н р
, то есть разница между скоростью вращающегося магнитного поля
скорость статора и ротора;
сравним теперь с синхронной скоростью, т.е.
скорость, которую должен был бы иметь ротор, если бы он был синхронизирован с
статор; потому что
мы хотим сделать сравнение в процентах или относительных, мы должны поставить в
знаменатель доли синхронной скорости, которая должна была быть
реальный один из ротора;
то получаем следующее соотношение:
где коэффициент
с это
сказал промах,
что означает, что ротор течет, то есть теряет обороты по отношению к
статор;
н с
это скорость в оборотах на
минута магнитного поля статора;
н р
— это скорость ротора.
соскальзывать
с
является безразмерным числом и изменяется от 0 до 1.
Если
s равно 0 означает
что ротор будет в идеальном синхронизме, что будет иметь одинаковую скорость
вращающегося магнитного поля
н с
.
На самом деле, если бы было
n r = n s
тогда
п с
— n r = 0
Если же промах
с это
равный 1 означает, что ротор неподвижен.
Фактически ротор неподвижен означает:
н р
= 0
Скольжение будет:
Тогда скольжение равно 1, когда ротор неподвижен, т.е.
на старте.
слип
никогда не будет равен 0;
на самом деле, если бы он был равен 0, то ротор да
достичь синхронной скорости, но его магнитное поле было бы постоянным, а не
переменной, которая была бы меньше для ЭДС, индуцируемой в роторе,
по закону Фарадея и, следовательно, будет меньше ток ротора и
мотор остановится.
Механическая характеристика
Механическая характеристика представляет тенденцию крутящего момента
T как функция скорости вращения ротора
н р
| механический характеристика асинхронного двигателя |
Механическая функция также может
представляют собой функцию скольжения
с;
помнишь ту оплошность
= 1 означает, что двигатель остановлен;
прокрутка равна нулю означает, что скорость максимальная, значит почти равная
к синхронизму.
механический |
Эта функция сообщает нам, что когда двигатель работает на высоких
скорость, то есть близкая к синхронной скорости
n s
крутящий момент очень
высокая; в этом
случае пробуксовка почти нулевая.
Однако, когда slpi увеличивается и достигает значения 1,
крутящий момент двигателя снижается, и двигатель замедляется;
поэтому мы должны предотвратить двигательные функции в
разрез а-б,
нестабильная черта; по факту,
на этом участке, если увеличивается механическая нагрузка, двигатель замедляется, т.е.
увеличивает скольжение по отношению к синхронной скорости, но также уменьшает
крутящий момент, при котором двигатель не смог бы увеличить свои обороты, но он
приводит к остановке, так как крутящий момент двигателя снижается.
Вместо
0-а — стабильный признак;
На самом деле, чем выше нагрузка в растяжке
0-a верно, что увеличивает
поток, а затем двигатель замедляется, но и увеличивает крутящий момент, для
которой асинхронный двигатель способен выдержать повышенную механическую нагрузку.
Скорость
Скорость двигателя не соответствует синхронности
:
n с = 60 f
в случае двигателя с одной полярной парой, пара является
полярная обмотка, расположенная на статоре, может генерировать северный полюс и южный полюс.
Поскольку ротор никогда не достигает
синхронная скорость n с ,
а ведь сказано асинхронно, ротор вращается со скоростью ниже чем
п с
при котором скорость ротора становится
следующее:
н р =
60 ф (1 с)
где множитель
(1-s) является фактором, который
снижает скорость синхронизма; на самом деле, поскольку это
s изменяется от 0 до 1, также
различия:
(1-с)
варьируется от 0 до 1.
Проскальзывание малых двигателей при полной нагрузке составляет около 6 %;
в то время как в больших двигателях при полной нагрузке падает до
2%.
Эффективность
КПД ч
из
трехфазный асинхронный двигатель мы можем
рассчитать по обычной формуле:
где
его
эффективность,
Р р
— механическая мощность, используемая на роторе,
P и
это потребление электроэнергии на
статор.
Мощность на статоре является электрической и может быть измерена с помощью
ваттметры;
имеющий мощность на ротор механического
тип может быть преобразован в электрическую энергию, если мы подсчитаем потери, которые
то есть потерянная мощность P p .
Потери мощности связаны как с нагревом обмоток
статора и ротора за счет эффекта Джоуля, потери в железе из-за
рассеянные магнитные потоки в статоре и в роторе, а также потери
из-за механического трения и охлаждающих вентиляторов.
Если мы обозначим через
стр стр
является
сумма всех потерь, то выходная мощность
ротора будет:
Р р
= P a — P p
то есть это будет разница между потребляемой мощностью
на статоре
P и
если только
потеря мощности P p .
Следовательно, эффективность становится:
Эффективность низкая для
малых двигателей, около 77%, а для больших двигателей она выше и достигает 94%.
Однофазный
асинхронный
мотор
Для малых мощностей изготавливаются из однофазных
асинхронные двигатели,
а именно те, которые используют общее напряжение, присутствующее в жилых домах
между фазой и нейтралью и 240 В и 50 Гц
Однофазный асинхронный двигатель |
Обмоток две;
первая основная обмотка работает на
схема и не в состоянии генерировать вращающееся магнитное поле, такое как запуск
двигатель;
соответственно нужна вторая обмотка указанного стартера, которая имеет цель
запуск двигателя под нагрузкой.