В практике эксплуатации синхронных машин бывают случаи, когда отдельные машины выпадают из синхронизма и их роторы начинают вращаться относительно поля якоря (статора) асинхронно, с некоторым скольжением s. Это случается вследствие перегрузки машин, значительного падения напряжения в сети и потери возбуждения в результате каких-либо неисправностей в системе возбуждения или ошибочного срабатывания автомата гашения поля. Хотя невозбужденная явно-полюсная машина может развивать в синхронном режиме определенную мощность за счет реактивного момента, обычно эта мощность является недостаточной для покрытия нагрузки, и поэтому явнополюсные машины при потере возбуждения чаще всего также выпадают из синхронизма.
При выпадении из синхронизма синхронная машина ведет себя подобно асинхронной, но ввиду различия конструкции ротора и наличия в общем случае тока возбуждения асинхронный режим синхронной машины имеет ряд особенностей.
Так как выпадение синхронных машин из синхронизма при авариях в энергосистемах происходит нередко, то выявление особенностей асинхронного режима и выяснение рациональных способов восстановления нормальных режимов работы имеют существенное практическое значение.
Широко применяется асинхронный пуск синхронных двигателей и компенсаторов, когда невозбужденная машина приключается к сети и ее скорость достигает почти синхронной скорости подобно асинхронному двигателю.
Асинхронные режимы работы невозбужденной и возбужденной синхронной машины существенным образом отличаются друг от друга. Асинхронный режим возбужденной синхронной машины является более сложным, и его можно рассматривать как наложение асинхронного режима невозбужденной асинхронной машины и режима установившегося короткого замыкания синхронного генератора.
Рассмотрим в первую очередь установившийся асинхронный режим работы невозбужденной синхронной машины.
Схемы замещения и их параметры.
Если бы ротор синхронной машины обладал магнитной и электрической симметрией, то работа этой машины в асинхронном режиме без возбуждения ничем не отличалась бы от работы нормальной асинхронной машины. Однако в общем случае такой симметрии нет, и поэтому требуется самостоятельное рассмотрение вопроса.
Пусть обмотка статора (якоря) трехфазной синхронной машины включена в сеть. Токи якоря при этом создают вращающееся поле, перемещающееся относительно несимметричного ротора со скоростью скольжения. Для анализа явлений при несимметричном роторе разложим вращающееся относительно него поле на два пульсирующих поля, одно из которых действует по продольной (d), а другое — по поперечной (q} оси ротора. Эти поля пульсируют со сдвигом по фазе на 90°. Кроме того, как и у асинхронной машины, рабочий процесс синхронной машины в асинхронном режиме можно привести к эквивалентному процессу при неподвижном роторе. Далее можно представить себе, что у такой машины с неподвижным ротором на статоре вместо трехфазной обмотки имеется эквивалентная двухфазная обмотка, причем одна фаза этой обмотки создает магнитный поток, пульсирующий по продольной оси, а другая фаза — поток, пульсирующий по поперечной оси ротора
Рис.1
причем напряжения этих фаз U и jU сдвинуты по фазе на 90°. В подобной двухфазной системе взаимная индукция между фазами отсутствует и явления по осям d и q можно рассматривать независимо друг от друга. В результате вместо одной схемы замещения для симметричной асинхронной машины для синхронной машины получаем две схемы замещения - одну для продольной и другую для поперечной оси.
При наличии успокоительной или пусковой обмотки (рис. 2, а и б) в схеме для продольной оси имеются две вторичные цепи, как и у двухклеточного асинхронного двигателя, а в схеме для поперечной оси –

Рис 2, а

Рис 2, б
одна вторичная цепь. При отсутствии указанных обмоток (рис. 2, в и г) количество вторичных цепей уменьшается на единицу. На схемах рис. 2 принято rа = 0 и не учитываются потери в стали статора. При наличии в цепи возбуждения добавочного сопротивления (например, сопротивления гашения поля) его величина должна включаться в rf
В основе рассмотрения явлений согласно рис. 1 и 2 лежит представление о двухфазной машине. Поэтому сопротивления схем рис. 2 также следовало бы считать эквивалентными сопротивлениями двухфазной машины. Однако, чтобы избежать введения в рассмотрение

Рис 2,в

Рис 2,г
новых параметров, будем предполагать, что сопротивления, фигурирующие в схемах рис. 2, представляют собой параметры m-фазной машины.
Асинхронные режимы различных видов синхронных машин.
При потере возбуждения синхронные генераторы переходят в асинхронный режим и их скорость вращения будет увеличиваться до тех пор, пока не наступит равенство между движущим моментом на валу и электромагнитным моментом машины. При этом машина будет потреблять из сети намагничивающий ток

и отдавать в сеть активную мощность.
При малых скольжениях поверхностный эффект в теле ротора турбогенератора проявляется слабо и поэтому глубина проникновения токов велика. В результате активное сопротивление тела ротора мало и момент достигает весьма большой величины уже при малых скольжениях.

Поэтому турбогенераторы способны развивать в асинхронном режиме большую мощность, причем потери в роторе малы и не представляют опасности в отношении нагрева ротора. Допустимую мощность турбогенератора в асинхронном режиме ограничивает ток статора, величина которого из-за большого намагничивающего тока достигает номинального значения. В большинстве случаев при I = Iн в турбогенераторах Р = (0,5 - 0,7) Pн,.
Ввиду относительно благоприятных характеристик Ma = f (s) на электростанциях разрешается кратковременная работа (до 30 мин) турбогенераторов в асинхронном режиме при условии, что потери в роторе и статоре не превышают потерь при номинальном режиме и потребление реактивной мощности с точки зрения режима работы энергосистемы допустимо. В течение указанного времени можно устранить неисправности в системе возбуждения, перевести турбогенератор на резервное возбуждение или перевести нагрузку на другие турбогенераторы или станции. Использование возможности работы турбогенераторов в асинхронном режиме позволяет увеличить надежность энергоснабжения потребителей.
Асинхронные характеристики гидрогенераторов значительно менее благоприятны. Гидрогенераторы имеют шихтованные полюсы, и успокоительные обмотки во многих случаях у них отсутствуют. При отсутствии успокоительной обмотки мощность в асинхронном режиме развивается только за счет токов, индуктируемых в обмотке возбуждения. Активное сопротивление успокоительной обмотки велико, и в этом случае момент Ma при малых s также мал. Поэтому гидрогенераторы не могут развивать значительной мощности в асинхронном режиме, успокоительная обмотка быстро нагревается, и если восстановление возбуждения в течение 10—15 сек невозможно, то их нужно отключать от сети.
Все синхронные двигатели имеют пусковые обмотки и обычно пускаются в ход как асинхронные двигатели, причем обмотка возбуждения замкнута через разрядное, или гасительное, сопротивление rг = (5 — 10) rf или замкнута накоротко. Пуск с разомкнутой обмоткой возбуждения недопустим, так как при этом может произойти повреждение ее изоляции. Скольжение невозбужденного двигателя изменяется при пуске от s = 1 до s = 0,05, когда включается ток возбуждения и двигатель втягивается в синхронизм.
Кривые М, = f (s) синхронных двигателей представлены на рис.. Момент, развиваемый обмоткой возбуждения, достигает максимального значения при малых скольжениях, в особенности, когда rг = 0, так как rf мало, а  относительно велико. Наоборот, момент, развиваемый пусковой обмоткой, достигает максимума при s = 0,3 - 0,4, так как активное сопротивление этой обмотки значительно больше и рассеяние меньше. При расчете кривых было принято, что сопротивление обмотки якоря ra = 0. Поэтому на этих кривых не отражено возникновение провала момента при s = 0,5 вследствие одноосного эффекта. Следует, однако, отметить, что при наличии пусковой обмотки на роторе этот эффект проявляется слабо.
относительно велико. Наоборот, момент, развиваемый пусковой обмоткой, достигает максимума при s = 0,3 - 0,4, так как активное сопротивление этой обмотки значительно больше и рассеяние меньше. При расчете кривых было принято, что сопротивление обмотки якоря ra = 0. Поэтому на этих кривых не отражено возникновение провала момента при s = 0,5 вследствие одноосного эффекта. Следует, однако, отметить, что при наличии пусковой обмотки на роторе этот эффект проявляется слабо.
Начальный пусковой момент (s = 1) синхронных двигателей при U = Uн должен быть достаточно велик. С другой стороны, при малых s

момент Ма также должен быть достаточно велик, так как в противном случае при пуске под нагрузкой двигатель в асинхронном режиме не сможет достичь скорости вращения, достаточно близкой к синхронной, и двигатель после включения тока возбуждения не втянется в синхронизм.
Крутизну характеристики Ма = f (s) при малых s принято определять значением Мапри s = 0,05, и эту величину момента условно называют входным моментом Мвх. Очевидно, что чем больше Мвх, тем лучше условия втягивания в синхронизм. Обычно требуется, чтобы Мвх = Мп Однако для увеличения Ма необходимо увеличить активное сопротивление пусковой обмотки, а для увеличения — уменьшить его. Поэтому вопрос о выборе величин Мвх и Мп надо решать компромиссным образом и использовать явление вытеснения тока в

пусковой обмотке для увеличения Мп. Стержни пусковой обмотки с целью увеличения их сечения и теплоемкости изготовляются из латуни.
Как видно из рис., при пуске без разрядного сопротивления Мвх получается меньше и, кроме того, при малых s может образоваться провал момента, так как максимум момента от действия обмотки возбуждения наступает при весьма малом s. Поэтому при rг = 0 втягивание в синхронизм происходит в менее благоприятных условиях.
Если синхронная машина лишена успокоительной или пусковой обмотки и имеет немассивные полюсы или ротор, то в результате сильного проявления одноосного эффекта асинхронный пуск ее возможен только на холостом ходу или при малой нагрузке на валу, причем обмотка возбуждения должна быть замкнута через значительное активное сопротивление.
Синхронные двигатели с массивными роторами или полюсами имеют благоприятную характеристику Ма = f (s), если отношение При малом  большое влияние на величину тока в полюсных наконечниках начинает оказывать сопротивление торцевых зон полюсного наконечника, и асинхронный момент поэтому Мa уменьшается.
большое влияние на величину тока в полюсных наконечниках начинает оказывать сопротивление торцевых зон полюсного наконечника, и асинхронный момент поэтому Мa уменьшается.
Читайте также:
lektsia.com
Синхронные двигатели обладают рядом особенностей, о которых лучше всего судить по их рабочим характеристикам (рис. 7.5). Эти характеристики показывают зависимость I, п, М, М2, P1 и
и  от мощности Р2 при U=const и f=const. Скорость вращения ротора п2 всегда равна синхронной скорости n2=n1=f160/p и не зависит от нагрузки, поэтому она имеет вид прямой, параллельной оси абсцисс.
от мощности Р2 при U=const и f=const. Скорость вращения ротора п2 всегда равна синхронной скорости n2=n1=f160/p и не зависит от нагрузки, поэтому она имеет вид прямой, параллельной оси абсцисс.
Момент двигателя М=М0+М2, где Мо— момент холостого хода, М2— полезный тормозной момент. Так как M0=const, а М2=P2/ изменяется пропорционально полезной мощности Р2 на валу, то момент М2 будет выражаться прямой, проходящей через начало координат, а момент М — прямой, расположенной несколько выше характеристики М2.
изменяется пропорционально полезной мощности Р2 на валу, то момент М2 будет выражаться прямой, проходящей через начало координат, а момент М — прямой, расположенной несколько выше характеристики М2.
 Кратковременная перегрузочная способность синхронного двигателя, так же как и синхронного генератора, зависит от величины угла
Кратковременная перегрузочная способность синхронного двигателя, так же как и синхронного генератора, зависит от величины угла  . При работе двигателя с номинальной нагрузкой и номинальным током возбуждения угол
. При работе двигателя с номинальной нагрузкой и номинальным током возбуждения угол  обычно не превышает 25-30°.
обычно не превышает 25-30°.
При этих значениях кратковременная перегрузочная способность синхронного двигателя (см. рис. 7.2)

Рис. 7.5. Рабочие характеристики синхронного двигателя
Подведенная к двигателю мощность P1 включает в себя потери (Р1=P2+ Pпот).
Pпот).Поэтому увеличение потребляемой мощности Р1 происходит несколько в большей мере, чем полезной мощности Р2 и характеристика Р1=f(Р2) имеет некоторую кривизну в сторону оси абсцисс. Ток пропорционален вращающему моменту и он будет выражаться той же прямой, что и момент М. При изменении нагрузки от 0 до 1/2 Pн кривая к. п. д. быстро возрастает, а затем ее рост прекращается, и к. п. д. машины даже понижается.
Изменение  зависит от характера возбуждения двигателя. Если обеспечить номинальное постоянное возбуждение машины при ее работе на холостом ходу, при котором
зависит от характера возбуждения двигателя. Если обеспечить номинальное постоянное возбуждение машины при ее работе на холостом ходу, при котором  =1, то с увеличением нагрузки получится недовозбужденный режим работы двигателя. При этом возникнут реактивные токи, отстающие от напряжения на угол
=1, то с увеличением нагрузки получится недовозбужденный режим работы двигателя. При этом возникнут реактивные токи, отстающие от напряжения на угол  . Наоборот, если установить номинальное постоянное возбуждение двигателя при номинальной нагрузке, то при уменьшении нагрузки двигатель начнет забирать из сети реактивные опережающие токи, а при перегрузке-реактивные отстающие токи. Кривая
. Наоборот, если установить номинальное постоянное возбуждение двигателя при номинальной нагрузке, то при уменьшении нагрузки двигатель начнет забирать из сети реактивные опережающие токи, а при перегрузке-реактивные отстающие токи. Кривая  =f(P2) дана для некоторого промежуточного значения тока возбуждения.
=f(P2) дана для некоторого промежуточного значения тока возбуждения.
Синхронные двигатели применяются главным образом для привода механизмов значительной мощности (свыше 100 кет), требующих постоянства числа оборотов.
В судовых условиях они используются в основном на судах технического флота (земснарядах), в электрических приводах компрессоров, центробежных насосов, лебедок, а также в системах генератор-двигатель.
Рис. 7.6. Схема пуска синхронного двигателя
Пуск синхронных двигателей осложняется тем, что при включении двигателя в сеть трехфазного переменного тока в обмотке его. статора возникает вращающееся магнитное поле, сразу приобретающее синхронную скорость п1= 60f/p, в то время как поле полюсов неподвижно. Вследствие этого каждые полпериода перед полюсом ротора проходят то северный, то южный полюса вращающегося поля статора и возникающий в результате взаимодействия полей электромагнитный момент в течение периода дважды меняет свое направление. Ротор остается неподвижным, так как он обладает значительной инерцией и в течение полупериода ему не может быть сообщена синхронная скорость, при которой электромагнитный вращающий момент будет иметь строго определенное постоянное направление. Поэтому, чтобы осуществить пуск синхронного двигателя, необходимо сначала сообщить ему с помощью небольшого постороннего двигателя скорость вращения, близкую к синхронной. Такой способ пуска синхронных двигателей, во-первых, требует дополнительной электрической машины, а, во-вторых, возможен лишь при незначительной нагрузке на валу двигателя. В настоящее время чаще всего применяется так называемый асинхронный пуск синхронных двигателей (рис. 7.6, а), для чегo в пазы полюсных наконечников ротора закладывается специальная л пусковая обмотка в виде стержней, соединенных между собой по торцам так, что образуется короткозамкнутая клетка. При включении двигателя в сеть трехфазного тока в его статорной обмоткесоздается вращающееся магнитное поле, которое, пересекая короткозамкнутые стержни пусковой обмотки, наводит в ней ток. Магнитное поле пусковой обмотки, взаимодействуя с вращающимся магнитным полем статора, создает вращающий момент и быстро развивает скорость, близкую к синхронной. После этого включают питание обмотки возбуждения (от возбудителя В), и двигатель втягивается в синхронизм. Во время разгона обмотка возбуждения двигателя должна быть замкнута на сопротивление R, так как иначе в ней наводилась бы большая э. д. с, опасная для состояния изоляции обмотки.
настоящее время чаще всего применяется так называемый асинхронный пуск синхронных двигателей (рис. 7.6, а), для чегo в пазы полюсных наконечников ротора закладывается специальная л пусковая обмотка в виде стержней, соединенных между собой по торцам так, что образуется короткозамкнутая клетка. При включении двигателя в сеть трехфазного тока в его статорной обмоткесоздается вращающееся магнитное поле, которое, пересекая короткозамкнутые стержни пусковой обмотки, наводит в ней ток. Магнитное поле пусковой обмотки, взаимодействуя с вращающимся магнитным полем статора, создает вращающий момент и быстро развивает скорость, близкую к синхронной. После этого включают питание обмотки возбуждения (от возбудителя В), и двигатель втягивается в синхронизм. Во время разгона обмотка возбуждения двигателя должна быть замкнута на сопротивление R, так как иначе в ней наводилась бы большая э. д. с, опасная для состояния изоляции обмотки.
Непосредственный пуск синхронных двигателей возможен лишь при достаточно мощных электрических сетях, так как пусковой ток двигателей равен 5—6-кратной величине номинального тока. Для снижения пускового тока применяют пуск с переключением обмотки статора со звезды на треугольник, что дает снижение линейного тока в 3 раза. Однако чаще пуск синхронных двигателей производят при пониженном напряжении, для чего используется автотрансформатор или реактор.
Автотрансформаторный пуск (рис. 7.6, б) производится тремя ступенями. Вначале к двигателю подводится напряжение U= =40—60% UH. Когда двигатель разовьет соответствующее число оборотов, размыкается выключатель В2 у автотрансформатора, и он используется как реактивная катушка. При этом к двигателю подводится напряжение U=70—80% UH. Наконец, замыкается выключатель В1 и к двигателю подается номинальное напряжение UH а к его обмотке возбуждения — постоянный ток. При автотрансформаторном пуске пусковой ток в сети (ток первичной обмотки трансформатора) пропорционален квадрату напряжения.
Реактивный пуск синхронных двигателей проще и дешевле, но при нем пусковые токи в сети имеют большую величину.
studfiles.net
Синхронный двигатель непосредственным включением обмотки статора (якоря) в сеть переменного тока не может быть запущен в ход.
Объясняется это следующим образом. При включении многофазной обмотки якоря в сеть практически мгновенно образуется вращающееся магнитное поле, частота вращения которого nпзависит от частоты f протекающего по обмоткам тока (nп =60 f /p). «Полюсы» этого поля, перемещаясь в пространстве, будут взаимодействовать то с одноименными, то с разноименными полюсами неподвижного возбужденного ротора. В соответствии с этим будетменяться направление вращающего момента, действующего на ротор. В течение половины периода изменения тока в обмотках момент будет направлен в одну сторону, а в течение другой половины — в противоположную.
Пуск мог бы произойти, если бы ротор разогнался до установившейся скорости в течение полупериода, когда вращающий момент не меняет свой знак. При частоте 50 Гц полупериод равен 0,01 с. Из-за механической инерции за такое время роторы практически всех синхронных двигателей развернуться не смогут.
Существует несколько способов пуска двигателя. Эти способы заключаются в том, что в процессе пуска ротор двигателя разгоняется до скорости вращающегося поля, после чего двигатель входит в синхронизм и начинает работать как синхронный. Применение получили пуск с помощью разгонного двигателя, частотный пуск и асинхронный пуск. Наибольшее распространение имеет асинхронный пуск.
Пуск с помощью разгонного двигателя состоит в том, что посторонним (разгонным) двигателем ротор синхронной машины разворачивается до номинальной скорости. Обмотка возбуждения включена в сеть постояного тока, а обмотка статора разомкнута. Затем производят включение её на параллельную работу с сетью способами, изложенными в гл. 3 (машина работает генератором). После подключения машины к сети разгонный двигатель механически отсоединяют от вала синхронной машины, и последняя переходит в двигательный режим. Мощность разгонного двигателя невелика и составляет 10—20 % номинальной мощности синхронного двигателя. Эта мощность покрывает мощность механических и магнитных потерь в синхронном двигателе.
Частотный пуск применяется в том случае, если синхронный двигатель подключен к автономному источнику, частоту напряжения которого можно изменять от нуля до номинальной. Если плавно повышать частоту питающего напряжения, то соответственно будет увеличиваться скорость магнитного поля. Ротор, следуя за полем, постепенно будет повышать свою скорость от нуля до номинальной. В процессе пуска машина все время работает в синхронном режиме.
Асинхронный пуск аналогичен пуску асинхронного двигателя. Для этого на роторе в полюсных наконечниках размещают пусковую обмотку. Эта обмотка выполняется по типу короткозамкнутой обмотки ротора асинхронного двигателя и имеет то же устройство, что и демпферная обмотка генератора (см. гл. 1). При пуске трехфазная обмотка статора включается в сеть. Ток, который будет протекать по этой обмотке, создаст вращающееся магнитное поле. Оно наведёт в пусковой обмотке ротора ЭДС и ток. В результате взаимодействия тока пусковой обмотки ротора с вращающимся магнитным полем образуется момент, под действием которого ротор придет во вращение и развернется до скорости, близкой к скорости поля ω1. Вращение его будет происходить со скольжением, которое зависит от нагрузки на валу (ω< ω1).
Вхождение в синхронизм достигается после включения постоянного тока в обмотку возбуждения за счет возникающего при этом синхронизирующего момента. С этого времени машина начинает работать как синхронный двигатель.
На рис. 4.6 показана схема асинхронного пуска. При пуске обмотка возбуждения не должна быть разомкнутой, так как в противоположном случае вследствие большого числа витков в нейвращающимся полем индуцировалась бы большая ЭДС, опасная не только для изоляции, но и для обслуживающего персонала. Обмотку возбуждения нельзя также замыкать накоротко, так как в этом случае она образует несимметричный (однофазный) контур. Он явится причиной образования дополнительного момента, под действием которого произойдет провал в кривой механической характеристики вблизи полусинхронной скорости. Из за этого ротор при пуске может застрять на промежуточной скорости (в точке А на рис. 4.7). В начале пуска обмотка возбуждения LM должна быть замкнута на резистор с сопротивлением, приблизительно в 10—15 раз большим, чем сопротивление самой обмотки (положение 1 переключателя S). По окончании пуска переключатель S переводится в положение 2, и обмотка возбуждения включается в сеть постоянного тока.
Рис. 4.6. Схема асинхронного пуска синхронного двигателя
Рис. 4.7. Механическая характеристика двигателя при асинхронном пуске с провалом вблизи полусинхронной скорости
Рис. 4.8. Механическая характеристика двигателя при асинхронном пуске
Асинхронный пуск синхронного двигателя характеризуется значениями пускового тока Iп и вращающих моментов – начального пускового Мпи входного Мв(рис. 4.8). Входным называется асинхронный момент при скорости ротора, равной 0,95 ω1. Этот момент равен наибольшему нагрузочному моменту, при котором возможно вхождение двигателя в синхронизм при включении постоянного тока в обмотку возбуждения.
Если сеть, в которую включается синхронный двигатель, недостаточно мощна, то во избежание большого падения напряжения при асинхронном пуске применяют меры для снижения начального пускового тока: включение через автотрансформатор, реактор и т.д. (см. пуск АД).
poznayka.org
Количество просмотров публикации Пуск синхронного двигателя - 3788
Синхронный двигатель непосредственным включением обмотки статора (якоря) в сеть переменного тока не должна быть запущен в ход.
Объясняется это следующим образом. При включении многофазной обмотки якоря в сеть практически мгновенно образуется вращающееся магнитное поле, частота вращения которого nп зависит oт частоты f протекающего по обмоткам тока (nп=60f/р). ʼʼПолюсыʼʼ этого поля, перемещаясь в пространстве, будут взаимодействовать то с одноименными, то с разноименными полюсами неподвижного, возбужденного ротора. В соответствии с этим будет меняться направление вращающего момента͵ действующего на ротор. Размещено на реф.рфВ течение половины периода изменения тока в обмотках момент будет направлен в одну сторону, а в течение другой половины — в противоположную.
Пуск мог бы произойти, в случае если бы ротор разогнался до установившейся скорости в течение полупериода, когда вращающий момент не меняет свой знак. При частоте 50 Гц полупериод равен 0,01 с. Из-за механической инерции за такое время роторы практически всех синхронных двигателей развернуться не смогут.
Существует несколько способов пуска двигателя. Эти способы заключаются в том, что в процессе пуска ротор двигателя разгоняется до скорости вращающегося поля, после чего двигатель входит в синхронизм и начинает работать как синхронный. Применение получили пуск с помощью разгонного двигателя, частотный пуск и асинхронный пуск. Наибольшее распространение имеет асинхронный пуск.
Пуск с помощью разгонного двигателя состоит в том, что посторонним (разгонным) двигателем ротор синхронной машины разворачивается до номинальной скорости. Обмотка возбуждения включена в сеть постоянного тока, а обмотка статора разомкнута. Далее производят включение ее на параллельную работу с сетью. После подключения машины к сети разгонный двигатель механически отсоединяют от вала синхронной машины, и последняя переходит в двигательный режим. Мощность разгонного двигателя невелика и составляет 10—20 % номинальной мощности синхронного двигателя. Эта мощность покрывает мощность механических и магнитных потерь в синхронном двигателе.
Частотный пуск применяется в том случае, в случае если синхронный двигатель подключен к автономному источнику, частоту напряжения которого можно изменять от нуля до номинальной. В случае если плавно повышать частоту питающего напряжения, то соответственно будет увеличиваться скорость магнитного поля. Ротор, следуя за полем, постепенно будет повышать свою скорость от нуля до номинальной. В процессе пуска машина все время работает в синхронном режиме.
Асинхронный пуск аналогичен пуску асинхронного двигателя. Для этого на роторе в полюсных наконечниках размещают пусковую обмотку. Эта обмотка выполняется по типу короткозамкнутой обмотки ротора асинхронного двигателя и имеет то же устройство, что и демпферная обмотка генератора. При пуске трехфазная обмотка статора включается в сеть. Ток, который будет протекать по этой обмотке, создаст вращающееся магнитное поле. Оно наведет в пусковой обмотке ротора ЭДС и ток. В результате взаимодействия тока пусковой обмотки ротора с вращающимся магнитным полем образуется момент, под действием которого ротор придет во вращение и развернется до скорости, близкой к скорости поля ω1. Вращение его будет происходить со скольжением, ĸᴏᴛᴏᴩᴏᴇ зависит от нагрузки на валу (ω<ω1).
Вхождение в синхронизм достигается после включения постоянного тока в обмотку возбуждения за счёт возникающего при этом синхронизирующего момента. С этого времени машина начинает работать как синхронный двигатель. На рис. 9 показана схема асинхронного пуска. При пуске обмотка возбуждения не должна быть разомкнутой, так как в противоположном случае вследствие большого числа витков в ней вращающимся полем индуцировалась бы большая ЭДС, опасная не только для изоляции, но и для обслуживающего персонала. Обмотку возбуждения нельзя также замыкать накоротко, так как в данном случае она образует несимметричный (однофазный) контур. Размещено на реф.рфОн явится причиной образования дополнительного момента͵ под действием которого произойдет провал в кривой механической характеристики вблизи полусинхронной скорости. Из-за этого ротор при пуске может застрять на промежуточной скорости (в точке А на рис. 10). В начале пуска обмотка возбуждения LM должна быть замкнута на резистор с сопротивлением, приблизительно в 10—15 раз большим, чем сопротивление самой обмотки (положение 1 переключателя S). По окончании пуска переключатель S переводится в положение 2, и обмотка возбуждения включается в сеть постоянного тока.
Рис. 9. Схема асинхронного пуск синхронного двигателя
| Рис. 10. Механическая характеристика двигателя при асинхронном пуске с провалом вблизи полусинхронной скорости | Рис. 11. Механическая характеристика двигателя при асинхронном пуске |
Асинхронный пуск синхронного двигателя характеризуется значениями пускового тока IП и вращающих моментов— начального пускового МП и входного МB (рис. 11). Входным принято называть асинхронный момент при скорости ротора, равной 0,95ω1. Этот момент равен наибольшему нагрузочному моменту, при котором возможно вхождение двигателя в синхронизм при включении постоянного тока в обмотку возбуждения.
В случае если сеть, в которую включается синхронный двигатель, недостаточно мощна, то во избежание большого падения напряжения при асинхронном пуске применяют меры для снижения начального пускового тока: включение через автотрансформатор, реактор и т.д.
6. Синхронные компенсаторы
Синхронный компенсатор является источником реактивной мощности и служит для регулирования cosφ сети. По режиму работы он является синхронным двигателем, работающим в режиме холостого хода, т. е. без механической нагрузки на валу. Синхронный компенсатор потребляет активную мощность, равную потерям внутри машины. Для повышения экономичности его работы потери стараются уменьшить, применяя для охлаждения водород, при этом из-за меньшей плотности водорода по сравнению с воздухом снижаются механические потери.
Рис. 12. U-образная характеристика синхронного компенсатора
Наиболее важной характеристикой синхронного компенсатора является U-образная характеристика (рис. 12). Она мало отличается от аналогичной характеристики синхронного двигателя при Р2=0.
Реактивная мощность, развиваемая синхронным компенсатором, зависит от тока возбуждения. Перевозбужденный синхронный компенсатор работает с током, опережающим напряжение сети, и отдает реактивную мощность в сеть. При недовозбуждении он работает с током, отстающим от напряжения сети, и потребляет реактивную мощность из сети.
Синхронный компенсатор включается в конце линии передачи непосредственно у потребителя. Компенсируя частично или полностью реактивную составляющую тока линии, он уменьшает общий ток и потери в ней.
Синхронные компенсаторы чаще всего применяются в сетях с большой индуктивной нагрузкой для компенсации отстающего тока. Такую нагрузку обычно создают включенные в сеть асинхронные двигатели. Компенсатор в данном случае работает с перевозбуждением. На рис. 13, 14 показаны схема включения компенсатора GC и векторная диаграмма. На векторной диаграмме ток I представляет собой ток в сети при отсутствии синхронного компенсатора, а ток I' — при его включении. Реактивная составляющая IР тока I частично скомпенсирована током синхронного компенсатора IC,K. В результате этого уменьшается угол между напряжением U и током I', a cosφ' повышается.
В некоторых случаях синхронный компенсатор работает с недовозбуждением. Необходимость в данном возникает, в случае если ток в линии содержит значительную опережающую составляющую, обусловленную ее емкостным сопротивлением. Это наблюдается в часы малой нагрузки линии передачи, когда отстающий ток нагрузки не компенсирует емкостную составляющую тока линии.
Синхронные компенсаторы устанавливаются также и для регулирования напряжения в конце линии электропередачи путем регулирования реактивного тока и изменения падения напряжения и его фазы. При опережающем токе синхронного компенсатора его ток возбуждения больше, чем при отстающем, в связи с этим условия нагрева компенсатора получаются более тяжелыми при опережающем токе.
Рис. 13. Схема включения синхронного компенсатора
→
Рис. 14. Векторная диаграмма для тока в сети при включенном синхронном компенсаторе
Вследствие этого номинальной мощностью синхронного компенсатора считается мощность при опережающем токе.
Синхронные компенсаторы имеют некоторые конструктивные отличия от двигателей. Οʜᴎ не имеют выходного конца вала, кроме того, поскольку вал не передает вращающего момента͵ он должна быть выполнен тоньше. Так как от синхронного компенсатора не требуется обеспечения больших перегрузок по моменту, то МMAX у них должна быть снижен за счёт уменьшения воздушного зазора (увеличения хd). Уменьшение воздушного зазора способствует сокращению размеров обмотки возбуждения. Все это приводит к уменьшению габаритов синхронного компенсатора.
Компенсаторы выпускаются на мощности от 2,8 до 320 MB∙А обычно в горизонтальном исполнении. Их номинальные напряжения составляют 6,6-20 кВ, а частота вращения 1000 или 750 об/мин.
referatwork.ru
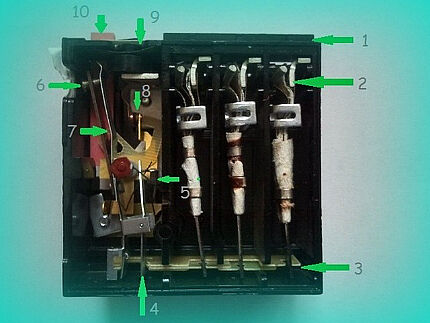
Изобретение относится к электротехнике, а именно к двухскоростным многофазным машинам переменного тока, и может быть использовано для привода различных машин и механизмов, требующего двухступенчатого регулирования скорости. Сущность данного изобретения состоит в том, что в статоре cинxpoннo-асинхронного двигателя размещена полюсопереключаемая многофазная обмотка с соотношением числа пар полюсов P1:P2 а на роторе - обмотка совмещенной конструкции, совмещающая трехфазную обмотку с Р = P1 высшей ступени скорости и обмотку возбуждения постоянного тока с числом пар полюсов Р = P2 низшей ступени скорости, которая соединена с возбудителем. Предложенный двухскоростной электродвигатель работает на высшей ступени скорости как асинхронный короткозамкнутый, а на низшей ступени скорости как синхронный, обладающий большой устойчивостью при колебаниях напряжения питания. Технический результат от использования данного изобретения состоит в обеспечении двухступенчатого регулирования скорости электродвигателя при его высокой перегрузочной способности на низшей ступени скорости. 2 ил.
Изобретение относится к многофазным электрическим машинам переменного тока и может быть использовано для привода различных машин и механизмов, требующего двухступенчатого регулирования скорости.
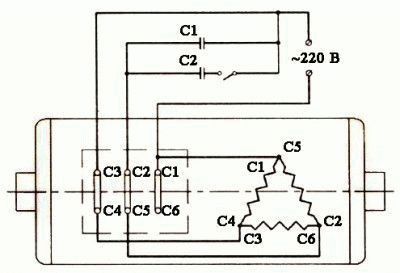
Известны примеры использования в полеводстве электротракторов, где в качестве тягового используется асинхронный электродвигатель с фазным ротором. На разных технологических операциях трактор должен иметь различную скорость передвижения и развивать различную мощность. Например, при пахоте трактор движется медленно и имеет высокую мощность, к тому же должен обладать высокой перегрузочной способностью; при разбрасывании сухих удобрений трактор движется быстрее и не развивает большой мощности. Для привода электротрактора наиболее эффективным может быть двухскоростной электродвигатель, работающий на высшей ступени скорости в режиме асинхронного короткозамкнутого электродвигателя, а на нижней ступени скорости в режиме синхронного двигателя, возбуждаемого постоянным током. Широко известны двухскоростные асинхронные двигатели с короткозамкнутым ротором (обмотка ротора типа "беличье колесо") с соотношением чисел пар полюсов 2:1 и постоянной мощностью на обоих ступенях. [Радин В. И. и др. Электрические машины: Асинхронные машины. Учеб. для электромех. спец. вузов - М.: Высшая школа, 1988]. Описанные двигатели не могут работать в режиме синхронного двигателя на низшей ступени скорости. Известны схемы совмещенных обмоток, создающих вращающие магнитное поле с числом пар полюсов P1 при питании многофазным током и неподвижную волну магнитодвижущей силы P2 при питании постоянным током. Такие обмотки применяются, в частности, в качестве статорных в совмещенных одномашинных асинхронно-синхронных преобразователях частоты. [Попов В.И. Электромашинные совмещенные преобразователи частоты. - М.: Энергия, 1980]. Однако преобразователь частоты не может использоваться как двухскоростной электродвигатель. Наиболее близким к заявляемому устройству является синхронизированный асинхронный двигатель, содержащий статор с многофазной обмоткой и ротор с многофазной обмоткой, подключенной к выпрямительному устройству, питаемому от обмотки возбудителя. [Акцептованная заявка ФРГ N 2143864, кл. 21 D2 17, 1973]. Недостатком этого двигателя является неспособность работать на двух ступенях скорости. Техническим решением задачи является, обеспечение двухступенчатого регулирования скорости электродвигателя, при высокоперегрузочной способности на низшей ступени скорости. Задача достигается тем, что статорная обмотка электродвигателя выполнена полюсопереключаемой с соотношением пар полюсов P1:P2, а обмотка ротора выполнена совмещенной, совмещающей многофазную обмотку с P=P1 и обмотку возбуждения постоянного тока с P=P2, подключенную к двум контактным кольцам для соединения с возбудителем. Новизна заявляемого предложения заключается в том, что статор с обмоткой выполняется традиционным для двухскоростного двигателя, а ротор с многофазной обмоткой выполняется совмещенного типа, причем на высшей ступени скорости обмотка является многофазной, а на низшей ступени при питании постоянным током или выпрямленным током создает намагничивающую силу, неподвижную относительно ротора, что позволяет электродвигателю работать на высшей ступени как асинхронный, а на низшей ступени как синхронный. По данным патентной и научно-технической литературы не обнаружена заявляемая совокупность признаков, что позволяет судить об изобретательском уровне предложения. На фиг. 1 представлена принципиальная схема предлагаемого устройства. Двигатель содержит двухскоростную многофазную обмотку - 1 на статоре с выводами 2. . . 10 для подключения к сети на различных ступенях скорости и ротор с обмоткой совмещенного типа - 11, которая выполнена как многофазная с двумя параллельными ветвями - 12 и 13 с раздельными нейтралями, причем нейтральные выводы присоединены к двум контактным кольцам для электрического соединения с возбудителем - 15, который может иметь традиционную конструкцию: статичную или с магнитным возбудителем и управляется собственными коммутационными аппаратами. Работу двигателя в статичном режиме рассмотрим на примере трехфазной машины, имеющей на статоре полюсопереключаемую обмотку - 1 с соотношением пар полюсов P1:P2 = 1:2 и роторную обмотку - 11, совмещающую обмотку переменного тока - 12 с P=P2 и обмотку возбуждения - 13 с P=P2, схема которой представлена на фиг. 2 (в связи с широкой известностью, схема полюсопереключаемой обмотки статора не приводится). Для работы на высшей ступени скорости клеммы - 8, 9, 10 подключают к трехфазному источнику (питающей сети), а клеммы - 2, 3, 4 и 5, 6, 7 закорачивают. Клеммы - 14 отключают от возбудителя. Статорная обмотка - 1 создает вращающиеся магнитное поле с P=Pi, которое наводит ЭДС и ток в обмотке ротора - 11, в результате чего ротор придет во вращение с некоторым скольжением. Двигатель работает как асинхронный; его трехфазная роторная обмотка является закороченной, а обе клеммы - 14 эквипотенциальны. При включении на нижнюю ступень скорости, клеммы - 2, 3, 4 подключаются к трехфазной сети, клеммы - 8, 9, 10 оставляют разомкнутыми, а клеммы - 5, 6, 7 соединяются с клеммами - 2, 3, 4, образуя схему "треугольник". Клеммы -14 подключают к источнику постоянного тока - возбудителю (возбудитель в рабочем состоянии). При этом статорная обмотка - 1 создает вращающуюся волну МДС с P=P2, а обмотка ротора - 11 создает волну МДС с P=P2 и неподвижную относительно ротора. Двигатель будет работать как синхронный. При регулировании тока возбуждения If можно существенно увеличить перегрузочную способность двигателя или минимизировать потребляемый из сети ток за счет доведения коэффициента мощности до единицы. Для запуска двигателя с работой на низшей ступени скорости, пуск осуществляется в две ступени: на первой ступени обмотки включаются аналогично пуску с P=P1, а при достижении полусинхронной скорости (контролируется дополнительными устройствами) обмотки статора переключают на схему с P=P2 и на обмотку ротора через клеммы - 14 подают ток возбуждения. Двигатель втягивается в синхронизм и далее работает в синхронном режиме. Известно множество полюсопереключаемых обмоток и множество схем совмещенных обмоток. Кроме традиционных, для таких обмоток применительно к предложенному устройству, должно соблюдаться следующее требование: обмотки должны удовлетворять дополнительному требованию совпадения чисел полюсов высшей и низшей ступеней статора с числами полюсов совмещенных обмоток ротора. Необходимо отметить, что контактные кольца не являются необходимой принадлежностью предложенного устройства. При использовании безконтактного возбудителя (например, с вращающимся выпрямителем) соединение обмотки ротора и возбудителя может быть прямым.Формула изобретения
Синхронно-асинхронный двигатель, содержащий статор с многофазной обмоткой и ротор с многофазной обмоткой, отличающийся тем, что статорная обмотка электродвигателя выполнена полюсопереключаемой с соотношением пар полюсов P1 : P2, а обмотка ротора выполнена совмещенной, совмещающей многофазную обмотку с P = P1 и обмотку возбуждения постоянного тока с P = P2, которая соединена с возбудителем.РИСУНКИ
Рисунок 1, Рисунок 2Похожие патенты:


Изобретение относится к электротехнике, в частности к электрическим машинам

Изобретение относится к электромашиностроению, а именно к конструкциям роторов асинхронных торцевых двигателей, и может найти применение в механизмах с плоским конструктивным исполнением, например в подкассетных узлах лентопротяжных механизмов, работающих в пусковых и старт-стопных режимах

Изобретение относится к электрическим машинам и может быть использовано для привода общепромьшленных механизмов

Изобретение относится к электрическим малинам переменного тока






Изобретение относится к области электротехники и может быть использовано для мощных синхронных и асинхронных трехфазных электрических машин, имеющих параллельные ветви обмотки статора

Изобретение относится к электротехнике и касается особенностей выполнения асинхронных электрических машин, содержащих электрически проводящий ротор, выполненный с возможностью вращения относительно статора

Изобретение относится к области электротехники и может быть использовано при производстве асинхронных двигателей малой мощности

Изобретение относится к электротехнике и может быть использовано в высокоскоростных электроприводах переменного тока


Изобретение относится к электрическим машинам малой мощности, а Именно к тихоходным двигателям с электромагнитной редукцией


Изобретение относится к электрическим машинам малой мощности, а именно к асинхронным двигателям с электромагнитной редукцией скорости вращения


Изобретение относится к электрическим машинам

Изобретение относится к электрическим машинам, в частности к способам создания многофазного бегущего электромагнитного поля в электрических машинах переменного тока
Изобретение относится к электротехнике, а именно к двухскоростным многофазным машинам переменного тока, и может быть использовано для привода различных машин и механизмов, требующего двухступенчатого регулирования скорости
www.findpatent.ru
Это зависимости  . Их примерный вид изображен на рис.3.32.
. Их примерный вид изображен на рис.3.32.
 СД может работать с
СД может работать с  . Обычно СД рассчитывают для работы с опережающим
. Обычно СД рассчитывают для работы с опережающим  . При этом СД не потребляет, а отдает реактивную мощность в сеть. На холостом ходу СД потребляет в основном реактивный опережающий ток и его
. При этом СД не потребляет, а отдает реактивную мощность в сеть. На холостом ходу СД потребляет в основном реактивный опережающий ток и его  весьма мал. При этом может существенно улучшается сети, на которую работают асинхронные двигатели, так как их реактивная мощность уменьшается ввиду ее компенсации СД.
весьма мал. При этом может существенно улучшается сети, на которую работают асинхронные двигатели, так как их реактивная мощность уменьшается ввиду ее компенсации СД.
3.6.5. Пуск в ход синхронного двигателя
СД не имеет начального пускового момента, так как в течение одного полупериода его ротор, в силу значительной инерции, не может разогнаться до частоты вращения поля  . Поэтому не возникает электромагнитного взаимодействия между ротором и полем. Чтобы это взаимодействие возникло, необходимо ротор разогнать до частоты близкой к синхронной частоте вращения.
. Поэтому не возникает электромагнитного взаимодействия между ротором и полем. Чтобы это взаимодействие возникло, необходимо ротор разогнать до частоты близкой к синхронной частоте вращения.
 Наиболее широко применяется асинхронный пуск СД. С этой целью на роторе СД помещается короткозамкнутая обмотка, выполненная по типу беличьей клетки (рис. 3.33). Стержни этой обмотки размещаются в полюсных наконечниках и замыкаются с торцов кольцами.
Наиболее широко применяется асинхронный пуск СД. С этой целью на роторе СД помещается короткозамкнутая обмотка, выполненная по типу беличьей клетки (рис. 3.33). Стержни этой обмотки размещаются в полюсных наконечниках и замыкаются с торцов кольцами.
При асинхронном пуске обмотка статора включается в сеть. Вращающиеся поле наводит в стержнях короткозамкнутой обмотки ЭДС и токи. В результате взаимодействия последних с магнитным полем возникает момент и ротор разгоняется до подсинхронной скорости.
При асинхронном пуске возможно применение двух схем (рис. 3.34).
При пуске по схеме (рис. 3.34,а) после включения обмотки статора СД приходит во вращение. В процессе разбега обмотка возбуждения СД замыкается на активное сопротивление  . Это делается с целью предотвращения пробоя обмотки возбуждения под действием значительной ЭДС индуктируемой в данной обмотке вращающимся полем. При подходе к подсинхронной скорости вращения сопротивление
. Это делается с целью предотвращения пробоя обмотки возбуждения под действием значительной ЭДС индуктируемой в данной обмотке вращающимся полем. При подходе к подсинхронной скорости вращения сопротивление  отключается и обмотка возбуждения (ОВ) подключается к зажимам возбудителя (В). Возбудителем является генератор постоянного тока параллельного возбуждения. В обмотке возбуждения (ОВ) появляется ток возбуждения
отключается и обмотка возбуждения (ОВ) подключается к зажимам возбудителя (В). Возбудителем является генератор постоянного тока параллельного возбуждения. В обмотке возбуждения (ОВ) появляется ток возбуждения  и СД под действием синхронизирующего момента входит в синхронизм.
и СД под действием синхронизирующего момента входит в синхронизм.
При асинхронном пуске по схеме (рис. 3.34,б), обмотка возбуждения СД в процессе разбега наглухо подключена к зажимам возбудителя (В). Так как сопротивление обмотки якоря возбудителя мало, то обмотка возбуждения СД оказывается примерно замкнутой накоротко. В процессе разбега, при частоте вращения  , начинает возбуждаться возбудитель, находящийся на одном валу с ротором СД. В обмотке возбуждения (ОВ) появляется ток возбуждения , который увеличивается по мере приближения частоты вращения
, начинает возбуждаться возбудитель, находящийся на одном валу с ротором СД. В обмотке возбуждения (ОВ) появляется ток возбуждения , который увеличивается по мере приближения частоты вращения  к подсинхронной. Далее СД автоматически втягивается в синхронизм.
к подсинхронной. Далее СД автоматически втягивается в синхронизм.
Пуск по схеме (рис. 3.34,б) имеет существенные недостатки.
1. В процессе разбега возбудитель возбуждается слишком рано, и возникающий ток вызывает дополнительный тормозной момент;
2. Приходится считаться с возможностью возникновения одноосного включения.
Этот эффект был рассмотрен выше при изучении работы АД с не симметричным сопротивлением ротора. В рассматриваемом случае вращающееся поле статора наводит в однофазной обмотке возбуждения СД переменную ЭДС частоты  . Под действием этой ЭДС в однофазной обмотке возбуждения возникает переменный ток той же частоты, который создает пульсирующее поле. Как известно, пульсирующее поле можно представить двумя вращающимися в противоположные стороны полями с частотой вращения
. Под действием этой ЭДС в однофазной обмотке возбуждения возникает переменный ток той же частоты, который создает пульсирующее поле. Как известно, пульсирующее поле можно представить двумя вращающимися в противоположные стороны полями с частотой вращения  . Прямое поле ротора вращается с частотой вращения
. Прямое поле ротора вращается с частотой вращения  , где – частота вращения ротора. Таким образом, прямое поле ротора вращается с той же частотой и в ту же сторону, что и поле статора. Другими словами, эти поля неподвижны относительно друг друга и обуславливают асинхронный момент, как в обычных АД (Рис.3.35, кривая 1). Что касается обратного поля ротора, то оно вращается с частотой
, где – частота вращения ротора. Таким образом, прямое поле ротора вращается с той же частотой и в ту же сторону, что и поле статора. Другими словами, эти поля неподвижны относительно друг друга и обуславливают асинхронный момент, как в обычных АД (Рис.3.35, кривая 1). Что касается обратного поля ротора, то оно вращается с частотой  . При
. При  это поле вращается в сторону противоположную вращению ротора, а при
это поле вращается в сторону противоположную вращению ротора, а при  – в ту же сторону. При
– в ту же сторону. При  поле неподвижно.
поле неподвижно.
 Обратное поле обуславливает знакопеременный момент (см. рис. 3.35, кривая 2). Результирующий момент (кривая 3) будет иметь провал при или при
Обратное поле обуславливает знакопеременный момент (см. рис. 3.35, кривая 2). Результирующий момент (кривая 3) будет иметь провал при или при  . Наличие этого провала может вызвать затруднение пуска.
. Наличие этого провала может вызвать затруднение пуска.
С целью увеличения начального пускового момента, активное сопротивление короткозамкнутой обмотки следует выбирать по возможности максимальным. Но при этом уменьшается момент входа в синхронизм, то есть наибольший нагрузочный момент при котором СД, доведенный до подсинхронной частоты вращения, способен еще войти в синхронизм.
Достоинства СД.
1. СД способен работать при . Перевозбужденный СД потребляет из сети опережающий ток, что способствует улучшению коэффициента мощности сети.
2. На СД оказывает меньшее влияние колебания напряжения сети, чем на АД. Действительно, у СД  , а у АД
, а у АД  .
.
3. Строго постоянная частота вращения независимо от режима работы.
Недостатки СД.
1. Более сложна конструкция. Необходимость в источнике постоянного тока для возбуждения.
2. Относительная сложность пуска СД.
3. Трудность регулирования частоты вращения.
Тем не менее, при мощностях более 200…300 кВт СД более предпочтителен, если не требуется регулировка частоты вращения.
www.poznayka.org
 При пуске синхронного двигателя его вращающий момент равен нулю, т. е. двигатель нужно раскрутить до частоты вращения, которая близка к синхронной. Иногда для этого применяется специальный разгонный асинхронный двигатель малой мощности, а двигатель синхронизируется с сетью по примеру генератора при включении на параллельную работу.
При пуске синхронного двигателя его вращающий момент равен нулю, т. е. двигатель нужно раскрутить до частоты вращения, которая близка к синхронной. Иногда для этого применяется специальный разгонный асинхронный двигатель малой мощности, а двигатель синхронизируется с сетью по примеру генератора при включении на параллельную работу.
Чаще всего применяется другой вид пуска. Для приспособления двигателя к такому пуску при явно полюсном роторе в полюсные наконечники закладывают пусковую короткозамкнутую обмотку, которая состоит из медных или латунных стержней. Она похожа на беличье колесо асинхронной машины и занимает небольшую часть окружности ротора.
Пуск двигателя можно разделить на два этапа: I — асинхронный набор частоты вращения без возбуждения постоянным током; II — втягивание в синхронизм после включения постоянного тока возбуждения. Первый этап такого пуска характеризуется тем, что обмотку возбуждения отключают от источника постоянного тока и замыкают активное сопротивление Rпуск , которое во много раз превышает активное сопротивление обмотки возбуждения. Нельзя оставлять обмотку возбуждения разомкнутой, потому что вращающееся поле способно индуктировать в ней большую э. д. с., которая опасна для целости изоляции.
Однако следовало бы замыкать эту обмотку накоротко, из-за того что в ней возникает большой однофазный ток, способный тормозить ротор при достижении им половины синхронной частоты вращения. Чаще всего для уменьшения пусковых токов применяют включение двигателя через пусковой автотрансформатор либо через реактивную катушку. При пуске замыкают выключатель 2, через который соединяются по схеме «звезда» три фазные обмотки автотрансформатора АТ. Для того чтобы подать на вход автотрансформатора напряжение сети, следует замкнуть рубильник 1, т. е. на зажимы статора синхронного двигателя СД подается пониженное с по- мощью автотрансформатора линейное напряжение трехфазной системы, под действием которого ротор двигателя начинает вращение как короткозамкнутый ротор асинхронного двигателя.
Если скольжение ротора мало, нужно разомкнуть рубильник, в результате чего напряжение на зажимах двигателя немного повысится, так как только часть каждой из фазных обмоток автотрансформатора является реактивной катушкой, которая включена последовательно с фазной обмоткой двигателя и при этом ограничивает своим сопротивлением величину пускового тока. Затем двигатель включается на полное напряжение сети через замыкание рубильника. Однако, пока не включили постоянный ток, ротор вращается асинхронно.
Пуск заканчивают включением постоянного тока возбуждения переключателем. Двигатель приобретает синхронную частоту вращения под действием электромагнитных сил и развивает необходимый вращающий момент. Такой пуск не требует операций по синхронизации двигателя с сетью и может быть автоматизирован.
Для пуска мощных синхронных двигателей можно улучшить условия пуска и работы через применение для питания цепи возбуждения управляемых кремниевых вентилей — тиристоров.
worldofscience.ru