






Категория:
Электрооборудование строительных машин
Механическая и угловая характеристики синхронных электродвигателейСинхронные двигатели начинают широко внедрять в строительное производство, применяя их для привода машин средней и большой мощности, не требующих регулирования скорости: компрессоров, насосов, камнедробилок, экскаваторов.
Синхронный двигатель имеет неизменную скорость вращения, поэтому его механическая характеристика представляет прямую линию, параллельную оси абсцисс. В квадранте координатной системы она характеризует двигательный, а в квадранте — генераторный режим (рис. 35,а).

Рис. 35. Механическая и угловая характеристики синхронного двигателяа — механическая характеристика; б — угловая характеристика
Синхронный двигатель обладает абсолютно жесткой механической характеристикой. Однако его момент не может иметь беспредельно большого значения. При некотором предельном или максимальном значении нагрузочного момента синхронный двигатель выходит из устойчивой синхронной работы и останавливается.
При увеличении нагрузки синхронного двигателя ротор его начинает отставать от поля статора, угол внутреннего сдвига фаз © при этом возрастает. Увеличению угла © соответствует рост момента синхронного двигателя. Однако при возрастании до значений, больших момент начинает уменьшаться и становится возможным выпадение из синхронизма и остановка двигателя.
Синхронный двигатель может работать и генератором с отдачей энергии в сеть при синхронной скорости, когда нагрузочный момент на его валу будет иметь отрицательное значение. Такой режим используется в сетевых двигателях преобразовательной группы системы Г—Д. Для целей торможения такой режим практического значения не имеет, поскольку при этом нельзя получить снижения скорости.
Торможение синхронных двигателей противовключе-нием практически не применяется из-за больших толчков тока и усложненной аппаратуры управления. Вместо этого обычно применяют динамическое торможение.
При динамическом торможении синхронного двигателя к кольцам ротора подводится постоянный ток, а обмотка статора замыкается на сопротивление. Механические характеристики синхронного двигателя в этом режиме будут подобны характеристикам асинхронного двигателя при динамическом торможении.
Современные синхронные двигатели имеют в роторе кроме нормальной рабочей обмотки, питаемой постоянным током, еще и специальную пусковую короткозам-кнутую обмотку. С помощью этой обмотки двигатель пускается в ход как асинхронный, поэтому в пусковых режимах он обладает асинхронной характеристикой.
Хотя синхронный двигатель является несколько более сложной машиной, чем асинхронный двигатель с ко-роткозамкнутым ротором (из-за наличия у первого возбудителя, колец и щеточного устройства), тем не менее он применяется очень широко, заменяя асинхронный электродвигатель. Объясняется- это главным образом тем, что синхронный двигатель может работать с опережающим cos ф, отдавая в сеть реактивную мощность, необходимую для возбуждения асинхронных машин и трансформаторов. Тем самым повышается cos ф всего предприятия в целом и уменьшается мощность компенсирующих устройств. При значительной мощности синхронных двигателей в данной электроустановке от компенсирующих устройств можно полностью отказаться. Коэффициент полезного действия синхронных двигателей и надежность их выше, чем асинхронных, вследствие увеличенного зазора между статором и ротором и меньшей чувствительности к изменениям напряжения сети. Последнее обстоятельство вызывается тем, что момент асинхронного двигателя пропорционален квадрату напряжения сети, а момент синхронного — первой степени напряжения.
Для уменьшения величины пусковых токов и связанного с ними снижения напряжения, особенно в сетях небольшой мощности, пуск синхронных двигателей осуществляется обычно через реактор, а в некоторых случаях— через автотрансформатор. Ограничение пусковых токов защищает обмотки двигателей от повышенных динамических нагрузок, возникающих при прямом включении в сеть.
Читать далее: Синхронное вращение двух асинхронных электродвигателей в системе электропривода
Категория: - Электрооборудование строительных машин
stroy-technics.ru
Одним из главных свойств синхронных электродвигателей является то, что они вращаются со строго постоянной скоростью. И эта скорость определяется частотой сети и количеством пар полюсов машины. Механическая характеристика синхронного электродвигателя n=f(M) в пределах от холостого хода до выпадения двигателя из синхронизма представлена горизонтальной прямой (n0=const).
Момент, который развивает электродвигатель, определяется электромагнитным взаимодействием МДС статора с МДС ротора. Вращающееся магнитное поле статора «тянет» за собой постоянное магнитное поле ротора. Таким образом происходит вращение вала двигателя.
Векторная упрощенная диаграмма напряжений синхронной машины показана ниже:

Данная диаграмма не учитывает падение активного напряжения статора, но такое допущение при определении момента и мощности не вносит значительных ошибок в расчет. При таком допущении электромагнитная мощность машины будет равна мощности, потребляемой из сети:

Где m – количество фаз питающего напряжения, U,I – фазные токи и напряжения, cosφ – коэффициент мощности сети.
Проанализировав векторную диаграмму можно получить следующие выражения:

Подставив в формулу мощности значение угла φ получим:

Определи значения Iq и Id из формул выше и подставив в выражения мощности и упростив выражение получим:

Где: Р=Рэм – мощность электромагнитная или потребляемая;
U – напряжение в питающей сети;
E – ЭДС индуктированная;
Xd и Xq – сопротивление индуктивное продольной и поперечной оси;
Iq и Id — соответственно токи поперечных и продольных осей;
Выражение электромагнитного момента выглядит следующим образом:

Он состоит из двух слагаемых:
В двигателях с неявнополюсной системой Xd = Xq, поэтому реактивный момент равен нулю.
При увеличении угла θ синхронный момент тоже будет расти. Его максимальное значение будет при θ=900, при дальнейшем увеличении θ момент синхронный будет уменьшатся. Можно сделать вывод, что устойчивая работа электродвигателя возможна при θ не более 900.
Если учесть возможность резкой неравномерности в нагрузке (изменения момента на валу), то угол θ стараются иметь в пределах θ=20÷300. При выполнении этого условия перегрузочная способность машины будет лежать в пределах:

В отличии от асинхронного двигателя момент синхронной машины пропорционален первой степени напряжения и первой степени ЭДС от магнитодвижущей силы основного возбуждения, соответственно в момент пиковых нагрузок перегрузочная способность синхронной машины может быть повышена путем увеличения тока возбуждения.
Зависимость электромагнитного момента и его составляющих – реактивного и синхронного, от угла θ показана ниже:

Из приведенной зависимости видно, что электродвигателя с явнополюсной конструкцией за счет влияния реактивного момента максимальное значение электромагнитного момента могут достигнуть в случае θмакс<900.
elenergi.ru
По опытным и расчетным данным табл. 12.3 и 12.4 построить угловую характеристику
приiв=const.
где – полный момент синхронного двигателя:
.
Здесь – момент синхронного двигателя при холостом ходе агрегата «Синхронный двигатель – генератор постоянного тока».
,
где – потери агрегата, принимаются из тарировочной кривой при холостом ходе.
При построении угловой характеристики следует иметь в виду, что характеристика не проходит через ноль (рис. 12.3),так как. при измерении угла за исходное положение макета полюсов (нулевое значение угла ) было принято его положение при. Продолжая характеристику до пересечения с осью абсцисс (рис. 12.3) получим действительный диапазон изменения угла .
Рис. 12.3. Угловая характеристика синхронного двигателя
Как зависит пусковой момент синхронного двигателя при асинхронном пуске от напряжения сети?
Как зависит момент синхронного двигателя от напряжения сети?
Как определить максимальный синхронный момент, развиваемый явнополюсным синхронным двигателем при отсутствии возбуждения?
В каких пределах изменения угла нагрузки возможна устойчивая работа синхронного двигателя с неявновыраженными полюсами?
Изобразить векторную диаграмму синхронного явнополюсного двигателя при недовозбуждении, перевозбуждении.
Какая реакция якоря имеет место в синхронном явнополюсном двигателе при перевозбуждении, при недовозбуждении?
Под действием какого момента синхронный явнополюсный двигатель может втянуться в синхронизм при асинхронном пуске?
Какой характер носит реакция якоря синхронного явнополюсного двигателя при ?
Копылов И.П. Электрические машины. – М.: Логос, 2000 г.
Вольдек А.И. Электрические машины.– Л.: Энергия,1978 г.
Иванов-Смоленский А.В. Электрические машины.– М.: Энергия,1980 г.
Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические машины.– М.: Высшая школа, 1987 г.
Хвостов В.С. Электрические машины. Машина постоянного тока.– М.: Высшая школа, 1988 г.
конспект лекций 1
Работа № 1 3
Исследование генераторов постоянного тока независимого, параллельного и смешанного возбуждения 3
Работа № 2 17
Исследование электродвигателей постоянного тока параллельного и смешанного возбуждения 17
Работа №3 27
Исследование электродвигателя постоянного тока последовательного возбуждения 27
Работа № 4 34
Исследование трёхфазного двухобмоточного трансформатора 34
Работа № 5 48
Параллельная работа трансформаторов 48
Работа № 6 56
Исследование асинхронного двигателя с фазным ротором 56
Работа № 7 73
Исследование асинхронной машины в режиме генератора 73
Работа №8 79
Исследование асинхронного двигателя с короткозам–кнутым ротором в 3-фазном и 1-фазном режимах. Исследование асинхронного конденсаторного двигателя 79
Работа № 9 92
Исследование трёхфазного синхронного генератора 92
Работа № 10 104
Определение параметров синхронной машины 104
Работа № 11 121
Исследование параллельной работы трёхфазного синхронного генератора 121
Работа № 12 128
Исследование трёхфазного синхронного двигателя 128
studfiles.net
U-образные характеристики. В процессе работы синхронного двигателя в его обмотке статора наводятся ЭДС, сумма которых  [см. (20.29)] приблизительно равна подведенному к обмотке статора напряжению сети
[см. (20.29)] приблизительно равна подведенному к обмотке статора напряжению сети  . Эта сумма ЭДС эквивалентна результирующему магнитному полю, вызванному действием двух магнитодвижущихся сил: возбуждения
. Эта сумма ЭДС эквивалентна результирующему магнитному полю, вызванному действием двух магнитодвижущихся сил: возбуждения  и статора
и статора  .
.
При неизменном напряжении сети  результирующее магнитное поле постоянно. Поэтому при изменении МДС возбуждения
результирующее магнитное поле постоянно. Поэтому при изменении МДС возбуждения  (изменении тока возбуждения
(изменении тока возбуждения  ) МДС статора
) МДС статора  изменяется таким образом, чтобы их совместное действие оставалось неизменным, т. е. чтобы оставалось неизменным результирующее магнитное поле синхронного двигателя. Это изменение МДС
изменяется таким образом, чтобы их совместное действие оставалось неизменным, т. е. чтобы оставалось неизменным результирующее магнитное поле синхронного двигателя. Это изменение МДС  может происходить только за счет изменения величины и фазы тока статора
может происходить только за счет изменения величины и фазы тока статора  , т. е. за счет изменения реактивной составляющей тока статора
, т. е. за счет изменения реактивной составляющей тока статора  .
.
Например, при увеличении тока возбуждения начиная от наименьшего его значения  возрастает МДС ротора, при этом МДС статора уменьшается. Это уменьшение МДС происходит при уменьшении индуктивной (по отношению к напряжению сети
возрастает МДС ротора, при этом МДС статора уменьшается. Это уменьшение МДС происходит при уменьшении индуктивной (по отношению к напряжению сети  ) составляющей тока статора , которая оказывает на магнитную систему подмагничивающее влияние.
) составляющей тока статора , которая оказывает на магнитную систему подмагничивающее влияние.
При этом полный ток статора  уменьшается, а коэффициент мощности двигателя
уменьшается, а коэффициент мощности двигателя  , увеличивается. При некотором значении тока возбуждения
, увеличивается. При некотором значении тока возбуждения  индуктивная составляющая тока статора падает до нуля. При этом ток статора достигнет минимального (при данной нагрузке) значения, так как станет чисто активным
индуктивная составляющая тока статора падает до нуля. При этом ток статора достигнет минимального (при данной нагрузке) значения, так как станет чисто активным  , а коэффициент мощности, = 1.
, а коэффициент мощности, = 1.
Увеличение тока возбуждения сверх значения , т. е. перевозбуждение двигателя, вызовет увеличение тока  , но теперь этот ток будет опережающим (емкостным) по отношению к напряжению
, но теперь этот ток будет опережающим (емкостным) по отношению к напряжению  . Таким образом, при недовозбужденш
. Таким образом, при недовозбужденш  синхронный двигатель работает с отстающим током, а при перевозбуждении
синхронный двигатель работает с отстающим током, а при перевозбуждении  — с опережающим. Зависимость тока статора от тока возбуждения для синхронного двигателя представлена U-образными характеристиками (рис. 22.5). Ток возбуждения соответствует работе синхронного двигателя при коэффициенте мощности = 1. При перевозбуждении двигателя в цепи статора появляется опережающий ток.
— с опережающим. Зависимость тока статора от тока возбуждения для синхронного двигателя представлена U-образными характеристиками (рис. 22.5). Ток возбуждения соответствует работе синхронного двигателя при коэффициенте мощности = 1. При перевозбуждении двигателя в цепи статора появляется опережающий ток.
Иначе говоря, синхронный двигатель является генератором реактивного тока: индуктивного по отношению к напряжению сети при недовозбуждении и емкостного при перевозбуждении. Указанная способность синхронных двигателей является их ценным качеством, которое используют для повышения коэффициента мощности электрических установок.
Асинхронные двигатели, являющиеся наиболее распространенными потребителями электроэнергии, работают с  < 1, создавая в сетях значительные индуктивные токи. Если же параллельно группе асинхронных двигателей включить один или несколько синхронных двигателей, работающих с перевозбуждением, то возникающая в сети емкостная составляющая тока будет частично или полностью компенсировать индуктивную составляющую тока, обусловленную работой асинхронных двигателей. При этом электрическая система, разгруженная от реактивных токов, будет работать, с
< 1, создавая в сетях значительные индуктивные токи. Если же параллельно группе асинхронных двигателей включить один или несколько синхронных двигателей, работающих с перевозбуждением, то возникающая в сети емкостная составляющая тока будет частично или полностью компенсировать индуктивную составляющую тока, обусловленную работой асинхронных двигателей. При этом электрическая система, разгруженная от реактивных токов, будет работать, с  , что способствует уменьшению потерь электроэнергии. Необходимо, однако, отметить, что при перевозбуждении синхронный двигатель потребляет значительный ток статора. Поэтому синхронные двигатели, предназначенные для работы с перевозбуждением, имеют несколько большие габариты, а их КПД меньше, чем у двигателей, предназначенных для работы с = 1, когда ток статора и потери двигателя имеют минимальные значения.
, что способствует уменьшению потерь электроэнергии. Необходимо, однако, отметить, что при перевозбуждении синхронный двигатель потребляет значительный ток статора. Поэтому синхронные двигатели, предназначенные для работы с перевозбуждением, имеют несколько большие габариты, а их КПД меньше, чем у двигателей, предназначенных для работы с = 1, когда ток статора и потери двигателя имеют минимальные значения.
Аналогично синхронному генератору, включенному на параллельную работу с сетью (см. § 21.6), синхронный двигатель имеет предел устойчивости при минимальном токе возбуждения (штриховая линия в левой части рис. 22.5).
Рабочие характеристики. Рабочие характеристики синхронного двигателя представляют собой зависимость частоты вращения ротора  , потребляемой мощности
, потребляемой мощности  , полезного момента
, полезного момента  , коэффициента мощности , и тока в обмотке статора
, коэффициента мощности , и тока в обмотке статора  от полезной мощности двигателя
от полезной мощности двигателя  (рис. 22.
(рис. 22.  ). Частота вращения ротора всегда равна синхронной частоте
). Частота вращения ротора всегда равна синхронной частоте  , поэтому график
, поэтому график  имеет вид прямой, параллельной оси абсцисс. Полезный момент на валу синхронного двигателя
имеет вид прямой, параллельной оси абсцисс. Полезный момент на валу синхронного двигателя  . Так как рабочие характеристики снимают при условии
. Так как рабочие характеристики снимают при условии  , то график
, то график  имеет вид прямой, выходящей из начала координат. Мощность на входе двигателя
имеет вид прямой, выходящей из начала координат. Мощность на входе двигателя  . С ростом нагрузки на валу двигателя увеличиваются также и потери
. С ростом нагрузки на валу двигателя увеличиваются также и потери  , поэтому потребляемая мощность
, поэтому потребляемая мощность  растет быстрее полезной мощности и график
растет быстрее полезной мощности и график  имеет несколько криволинейный вид.
имеет несколько криволинейный вид.
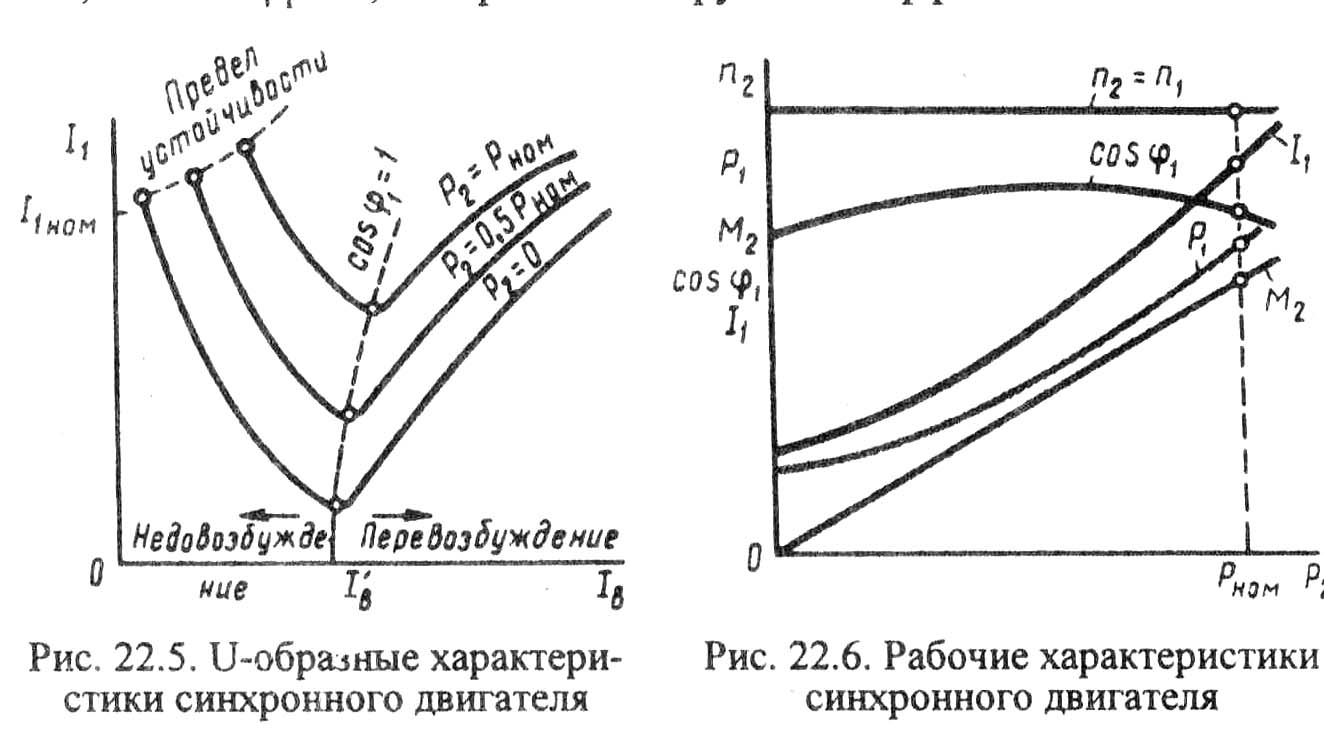
Рис. 22.5 U-образные характеристики синхронного двигателя
Рис. 22.6. Рабочие характеристики синхронного двигателя
Вид графика 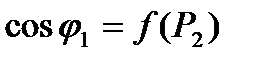 зависит от вида настройки тока возбуждения: если в режиме х. х. ток возбуждения установлен таким, что
зависит от вида настройки тока возбуждения: если в режиме х. х. ток возбуждения установлен таким, что  = 1, то с ростом нагрузки коэффициент мощности снижается, если же установить =1 при номинальной нагрузке, то при недогрузке двигатель будет забирать из сети реактивный опережающий ток, а при перегрузке — отстающий. Обычно устанавливают ток возбуждения таким, чтобы =1 при средней нагрузке (рис. 22. ). В этом случае коэффициент мощности во всем диапазоне нагрузок остается достаточно высоким. Если же установить ток в обмотке возбуждения синхронного двигателя таким, чтобы =1 был при нагрузке несколько превышающей номинальную, то при номинальной нагрузке
= 1, то с ростом нагрузки коэффициент мощности снижается, если же установить =1 при номинальной нагрузке, то при недогрузке двигатель будет забирать из сети реактивный опережающий ток, а при перегрузке — отстающий. Обычно устанавливают ток возбуждения таким, чтобы =1 при средней нагрузке (рис. 22. ). В этом случае коэффициент мощности во всем диапазоне нагрузок остается достаточно высоким. Если же установить ток в обмотке возбуждения синхронного двигателя таким, чтобы =1 был при нагрузке несколько превышающей номинальную, то при номинальной нагрузке  и двигатель будет потреблять из сети опережающий по отношению к напряжению сети ток, что приведет к повышению коэффициента мощности этой сети. В этом отношении синхронные двигатели выгодно отличаются от асинхронных, работающих с отстающим по фазе током (особенно при недогрузке двигателя) и снижающих энергетические показатели питающей сети.
и двигатель будет потреблять из сети опережающий по отношению к напряжению сети ток, что приведет к повышению коэффициента мощности этой сети. В этом отношении синхронные двигатели выгодно отличаются от асинхронных, работающих с отстающим по фазе током (особенно при недогрузке двигателя) и снижающих энергетические показатели питающей сети.
Ток в обмотке статора двигателя  . Из этого выражения видно, что ток с увеличением нагрузки на валу двигателя растет быстрее, чем потребляемая мощность , вследствие уменьшения .
. Из этого выражения видно, что ток с увеличением нагрузки на валу двигателя растет быстрее, чем потребляемая мощность , вследствие уменьшения .
Так как ротор синхронного двигателя вращается в ту же сторону, что и поле статора, то направление вращения ротора определяется порядком следования фаз линейных проводов, подведенных к обмотке статора, и порядком расположения фаз обмотки статора. Для изменения направления вращения трехфазного синхронного двигателя необходимо переключить два линейных привода, подведенных из сети к выводам обмотки статора (см. § 9.3).
В заключение необходимо отметить, что синхронные двигатели по сравнению с асинхронными имеют преимущество, заключающееся в том, что они могут работать с = 1, не создавая в щей сети индуктивных токов, вызывающих дополнительные потери энергии. Более того, при работе с перевозбуждением синхронные двигатели создают в сети емкостный ток, чем способствуют повышению коэффициента мощности энергосистемы в целом. Другое достоинство синхронных двигателей состоит в том, что, как это следует из (21.11), основная составляющая электромагнитного момента пропорциональна напряжению сети  , а у асинхронных двигателей электромагнитный момент пропорционален
, а у асинхронных двигателей электромагнитный момент пропорционален  [см. (13.14)]. По этой причине при понижении напряжения в сети синхронные двигатели сохраняют большую перегрузочную способность, чем асинхронные.
[см. (13.14)]. По этой причине при понижении напряжения в сети синхронные двигатели сохраняют большую перегрузочную способность, чем асинхронные.
К недостаткам синхронных двигателей относятся их более сложная конструкция и повышенная стоимость по сравнению с асинхронными двигателями с короткозамкнутым ротором. Кроме того, для работы синхронного двигателя требуется устройство для питания постоянным током обмотки возбуждения.
Опыт эксплуатации показал, что применение синхронных двигателей общего назначения наиболее целесообразно при мощности 200 кВт и более в установках, не требующих частых пусков и регулирования частоты вращения (мощные насосы, вентиляторы, компрессоры и т. п.).
Синхронный компенсатор
Синхронный компенсатор (СК) представляет собой синхронную машину, предназначенную для генерирования реактивной мощности. Синхронный компенсатор включают в электрическую систему с целью повышения ее коэффициента мощности.
Принцип происходящих при этом явлений состоит в том, что необходимую для работы некоторых потребителей реактивную мощность вырабатывает не синхронный генератор, установленный на электростанции, а синхронный компенсатор, установленный в непосредственной близости к потребителю. К числу потребителей переменного тока, требующих значительной реактивной мощности, в первую очередь относятся асинхронные двигатели. На рис. 22.7 показана система, состоящая из синхронного генератора (СГ), повышающего ТрI и понижающего ТрII трансформаторов, линии электропередачи (ЛЭП), потребителя Z и синхронного компенсатора (СК), включенного непосредственно на входе потребителя. Синхронный компенсатор, включенный в сеть, работает как синхронный двигатель без нагрузки  , т. е. в режиме х. х., и при вырабатывает реактивную мощность
, т. е. в режиме х. х., и при вырабатывает реактивную мощность  , необходимую для работы потребителя Z, например группы асинхронных двигателей. Благодаря этому реактивная мощность в СГ и ЛЭП доведена до некоторого минимального значения
, необходимую для работы потребителя Z, например группы асинхронных двигателей. Благодаря этому реактивная мощность в СГ и ЛЭП доведена до некоторого минимального значения  . Это способствует повышению технико-экономических показателей всей электрической системы.
. Это способствует повышению технико-экономических показателей всей электрической системы.
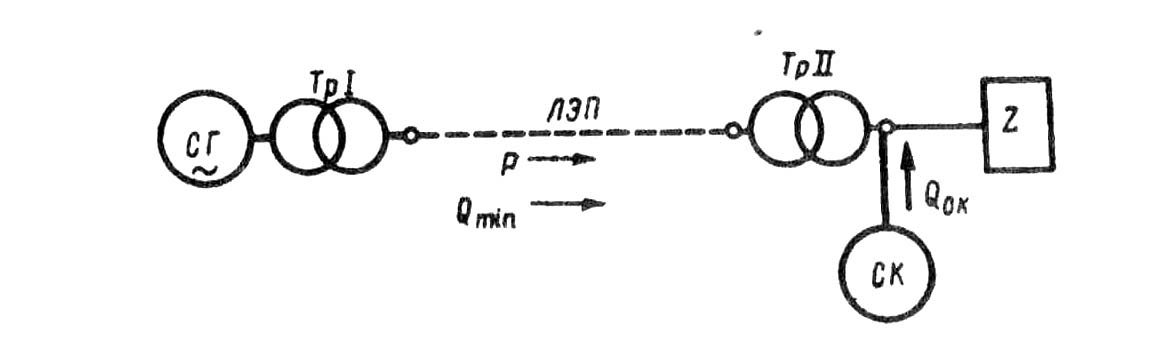
Рис. 22.7. Схема включения синхронного
компенсатора (СК) в электрическую систему
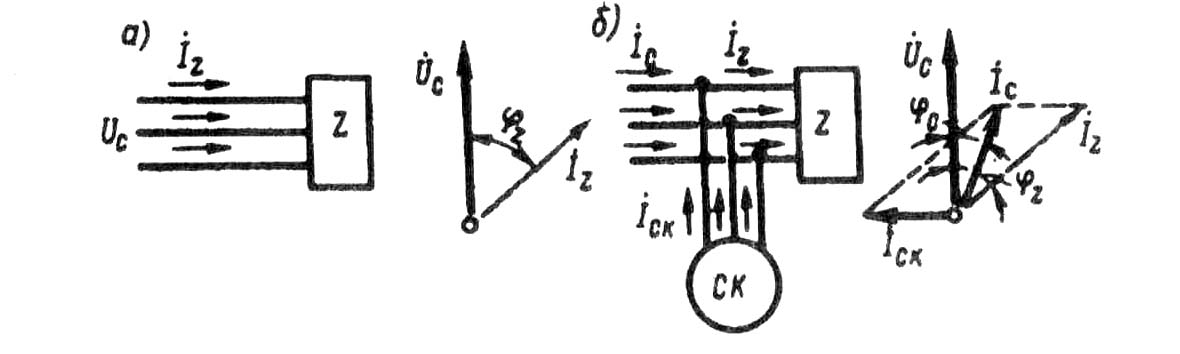
Рис. 22.8. Применение синхронного компенсатора для повышения коэффициента мощности сети
Для пояснения явлений, связанных с подключением СК к электрической системе, рассмотрим рис. 22.8. При подключении потребителя Z к сети с напряжением (рис. 22.8,  ) в сети возникает ток
) в сети возникает ток  , отстающий по фазе от напряжения
, отстающий по фазе от напряжения  на угол
на угол  , обусловленный значительной индуктивной составляющей тока
, обусловленный значительной индуктивной составляющей тока  . При подключении СК параллельно потребителю Z и создании в СК режима перевозбуждения (рис. 22.8, )в сети появится ток
. При подключении СК параллельно потребителю Z и создании в СК режима перевозбуждения (рис. 22.8, )в сети появится ток  , опережающий по фазе напряжение
, опережающий по фазе напряжение  на угол 90°. Результирующий ток в сети
на угол 90°. Результирующий ток в сети
 (22.1)
(22.1)
Фазовый сдвиг этого тока относительно напряжения сети  (угол
(угол  ) намного меньше угла фазового сдвига до включения СК (угол
) намного меньше угла фазового сдвига до включения СК (угол  ). Кроме того, ток
). Кроме того, ток  станет меньше
станет меньше  . В этом можно убедиться исходя из следующих соображений. Так как СК работает без нагрузки на валу, то его активная мощность не велика и определяется потерями х.х. в компенсаторе. Пренебрегая этими потерями, можно активную мощность в сети до подключения СК
. В этом можно убедиться исходя из следующих соображений. Так как СК работает без нагрузки на валу, то его активная мощность не велика и определяется потерями х.х. в компенсаторе. Пренебрегая этими потерями, можно активную мощность в сети до подключения СК
 (22.2)
(22.2)
приравнять к активной мощности сети после подключения СК:
 (22.3)
(22.3)
Но так как  , а
, а  , то
, то  . В результате синхронный генератор и линия электропередачи разгружаются, и потери мощности в них уменьшаются.
. В результате синхронный генератор и линия электропередачи разгружаются, и потери мощности в них уменьшаются.
В некоторых случаях СК работают с недовозбуждением. Необходимость в этом возникает, если ток в системе содержит значительную емкостную составляющую, которая не компенсируется индуктивной составляющей тока потребителей. Обычно степень возбуждения СК регулируют посредством автоматических устройств.
Синхронные компенсаторы применяют также для стабилизации напряжения в сети при передаче энергии по линиям большой протяженности. При больших индуктивных нагрузках напряжение в конце линии (у потребителей) оказывается намного меньше, чем в начале; при малых нагрузках, наоборот, под влиянием емкостных сопротивлений линии напряжение в конце линии может даже повышаться по сравнению с напряжением в начале. Если же в конце линии (у потребителей) включить СК, работающий при больших нагрузках с перевозбуждением и при малых нагрузках с недовозбуждением, то это позволит поддерживать напряжение в конце линии практически неизменным.
Условия нагревания СК при опережающем токе (при перевозбуждении) более тяжелые, чем при отстающем (при недовозбуждении), поэтому номинальной мощностью компенсатора считают мощность при перевозбуждении.
Пример 22.1. Потребитель, включенный в сеть переменного тока напряжением  = 6,3 кВ, потребляет мощность 1500 кВ·А при коэффициенте мощности
= 6,3 кВ, потребляет мощность 1500 кВ·А при коэффициенте мощности  = 0,7 . Определить мощность синхронного компенсатора, необходимого для повышения коэффициента мощности в сети до
= 0,7 . Определить мощность синхронного компенсатора, необходимого для повышения коэффициента мощности в сети до  = 0,95 (
= 0,95 (  = 0,31). Определить также силу тока нагрузки в сети до и после компенсации.
= 0,31). Определить также силу тока нагрузки в сети до и после компенсации.
Решение. До включения СК реактивная мощность сети  кВ∙Ар, ток нагрузки в сети
кВ∙Ар, ток нагрузки в сети
 А;
А;
активная составляющая этого тока  А.
А.
После включения СК реактивная мощность уменьшилась до
 кВ∙Ар.
кВ∙Ар.
Таким образом, для повышения коэффициента мощности установки от  = 0,7 до
= 0,7 до  = 0,95 требуется включить СК мощностью
= 0,95 требуется включить СК мощностью
 кВ∙Ар.
кВ∙Ар.
При этом активная составляющая тока сети не изменится (  = 97 А), а реактивная составляющая этого тока станет равной
= 97 А), а реактивная составляющая этого тока станет равной
 А.
А.
Следовательно, ток в сети после включения СК
 А.
А.
Обычно коэффициент мощности увеличивают до 0,92—0,95, так как экономия, получаемая от повышения коэффициента мощности до единицы, не оправдывает увеличивающихся расходов, обусловленных возросшей мощностью синхронного компенсатора. Так, если в рассматриваемом примере потребовалось бы увеличить коэффициент мощности в сети до единицы, то пришлось бы применить синхронный компенсатор мощностью 1050 кВ∙Ар, т. е. почти в два раза больше, чем при  = 0,95.
= 0,95.
Синхронные компенсаторы — это электрические машины большой мощности: от 10 до 160 тыс. кВ∙А. Выполняют их обычно с горизонтальным расположением вала на напряжение от 6,6 до 16 кВ, частотой 50 Гц. Число полюсов в СК обычно составляет  = 6 и 8, что соответствует частоте вращения ротора 1000 и 750 об/мин. В синхронных компенсаторах современных серий применен асинхронный пуск, поэтому ротор СК снабжен пусковой клеткой.
= 6 и 8, что соответствует частоте вращения ротора 1000 и 750 об/мин. В синхронных компенсаторах современных серий применен асинхронный пуск, поэтому ротор СК снабжен пусковой клеткой.
Вал компенсатора не передает вращающего момента, и поэтому при его расчете учитывают лишь силу тяжести ротора и силу магнитного притяжения. В итоге вал СК по сравнению с валом синхронного двигателя имеет уменьшенное сечение. Это способствует уменьшению габаритов и облегчению СК. Так как вал СК не имеет выступающего конца, то СК сравнительно легко герметизировать с целью применения в нем водородного охлаждения (см. § 19.3).
Наиболее важными характеристиками СК являются U-образные характеристики, определяющие основные параметры компенсатора: значения токов в обмотке статора и в обмотке возбуждения. В принципе эти характеристики не отличаются от U-образной характеристики синхронного двигателя в режиме х.х. (  = 0). Указанные характеристики строят для разных напряжений сети.
= 0). Указанные характеристики строят для разных напряжений сети.
Синхронный компенсатор не несет активной нагрузки (его электромагнитная мощность  ) и работает при значении угла
) и работает при значении угла  , что обеспечивает СК большую перегрузочную способность.
, что обеспечивает СК большую перегрузочную способность.
Контрольные вопросы.
1. Чем ограничивается область устойчивой работы синхронного двигателя?
2. Объясните процесс пуска синхронного двигателя?
3. Как регулируется коэффициент мощности синхронного двигателя?
4. Каково назначение синхронного компенсатора?
5. Каковы достоинства и недостатки синхронных двигателей по сравнению с асинхронными?
Глава 23 • Синхронные машины специального назначения
Читайте также:
lektsia.com
Это зависимости  . Их примерный вид изображен на рис.3.32.
. Их примерный вид изображен на рис.3.32.
 СД может работать с
СД может работать с  . Обычно СД рассчитывают для работы с опережающим
. Обычно СД рассчитывают для работы с опережающим  . При этом СД не потребляет, а отдает реактивную мощность в сеть. На холостом ходу СД потребляет в основном реактивный опережающий ток и его
. При этом СД не потребляет, а отдает реактивную мощность в сеть. На холостом ходу СД потребляет в основном реактивный опережающий ток и его  весьма мал. При этом может существенно улучшается сети, на которую работают асинхронные двигатели, так как их реактивная мощность уменьшается ввиду ее компенсации СД.
весьма мал. При этом может существенно улучшается сети, на которую работают асинхронные двигатели, так как их реактивная мощность уменьшается ввиду ее компенсации СД.
3.6.5. Пуск в ход синхронного двигателя
СД не имеет начального пускового момента, так как в течение одного полупериода его ротор, в силу значительной инерции, не может разогнаться до частоты вращения поля  . Поэтому не возникает электромагнитного взаимодействия между ротором и полем. Чтобы это взаимодействие возникло, необходимо ротор разогнать до частоты близкой к синхронной частоте вращения.
. Поэтому не возникает электромагнитного взаимодействия между ротором и полем. Чтобы это взаимодействие возникло, необходимо ротор разогнать до частоты близкой к синхронной частоте вращения.
 Наиболее широко применяется асинхронный пуск СД. С этой целью на роторе СД помещается короткозамкнутая обмотка, выполненная по типу беличьей клетки (рис. 3.33). Стержни этой обмотки размещаются в полюсных наконечниках и замыкаются с торцов кольцами.
Наиболее широко применяется асинхронный пуск СД. С этой целью на роторе СД помещается короткозамкнутая обмотка, выполненная по типу беличьей клетки (рис. 3.33). Стержни этой обмотки размещаются в полюсных наконечниках и замыкаются с торцов кольцами.
При асинхронном пуске обмотка статора включается в сеть. Вращающиеся поле наводит в стержнях короткозамкнутой обмотки ЭДС и токи. В результате взаимодействия последних с магнитным полем возникает момент и ротор разгоняется до подсинхронной скорости.
При асинхронном пуске возможно применение двух схем (рис. 3.34).
При пуске по схеме (рис. 3.34,а) после включения обмотки статора СД приходит во вращение. В процессе разбега обмотка возбуждения СД замыкается на активное сопротивление  . Это делается с целью предотвращения пробоя обмотки возбуждения под действием значительной ЭДС индуктируемой в данной обмотке вращающимся полем. При подходе к подсинхронной скорости вращения сопротивление
. Это делается с целью предотвращения пробоя обмотки возбуждения под действием значительной ЭДС индуктируемой в данной обмотке вращающимся полем. При подходе к подсинхронной скорости вращения сопротивление  отключается и обмотка возбуждения (ОВ) подключается к зажимам возбудителя (В). Возбудителем является генератор постоянного тока параллельного возбуждения. В обмотке возбуждения (ОВ) появляется ток возбуждения
отключается и обмотка возбуждения (ОВ) подключается к зажимам возбудителя (В). Возбудителем является генератор постоянного тока параллельного возбуждения. В обмотке возбуждения (ОВ) появляется ток возбуждения  и СД под действием синхронизирующего момента входит в синхронизм.
и СД под действием синхронизирующего момента входит в синхронизм.
При асинхронном пуске по схеме (рис. 3.34,б), обмотка возбуждения СД в процессе разбега наглухо подключена к зажимам возбудителя (В). Так как сопротивление обмотки якоря возбудителя мало, то обмотка возбуждения СД оказывается примерно замкнутой накоротко. В процессе разбега, при частоте вращения  , начинает возбуждаться возбудитель, находящийся на одном валу с ротором СД. В обмотке возбуждения (ОВ) появляется ток возбуждения , который увеличивается по мере приближения частоты вращения
, начинает возбуждаться возбудитель, находящийся на одном валу с ротором СД. В обмотке возбуждения (ОВ) появляется ток возбуждения , который увеличивается по мере приближения частоты вращения  к подсинхронной. Далее СД автоматически втягивается в синхронизм.
к подсинхронной. Далее СД автоматически втягивается в синхронизм.
Пуск по схеме (рис. 3.34,б) имеет существенные недостатки.
1. В процессе разбега возбудитель возбуждается слишком рано, и возникающий ток вызывает дополнительный тормозной момент;
2. Приходится считаться с возможностью возникновения одноосного включения.
Этот эффект был рассмотрен выше при изучении работы АД с не симметричным сопротивлением ротора. В рассматриваемом случае вращающееся поле статора наводит в однофазной обмотке возбуждения СД переменную ЭДС частоты  . Под действием этой ЭДС в однофазной обмотке возбуждения возникает переменный ток той же частоты, который создает пульсирующее поле. Как известно, пульсирующее поле можно представить двумя вращающимися в противоположные стороны полями с частотой вращения
. Под действием этой ЭДС в однофазной обмотке возбуждения возникает переменный ток той же частоты, который создает пульсирующее поле. Как известно, пульсирующее поле можно представить двумя вращающимися в противоположные стороны полями с частотой вращения  . Прямое поле ротора вращается с частотой вращения
. Прямое поле ротора вращается с частотой вращения  , где – частота вращения ротора. Таким образом, прямое поле ротора вращается с той же частотой и в ту же сторону, что и поле статора. Другими словами, эти поля неподвижны относительно друг друга и обуславливают асинхронный момент, как в обычных АД (Рис.3.35, кривая 1). Что касается обратного поля ротора, то оно вращается с частотой
, где – частота вращения ротора. Таким образом, прямое поле ротора вращается с той же частотой и в ту же сторону, что и поле статора. Другими словами, эти поля неподвижны относительно друг друга и обуславливают асинхронный момент, как в обычных АД (Рис.3.35, кривая 1). Что касается обратного поля ротора, то оно вращается с частотой  . При
. При  это поле вращается в сторону противоположную вращению ротора, а при
это поле вращается в сторону противоположную вращению ротора, а при  – в ту же сторону. При
– в ту же сторону. При  поле неподвижно.
поле неподвижно.
 Обратное поле обуславливает знакопеременный момент (см. рис. 3.35, кривая 2). Результирующий момент (кривая 3) будет иметь провал при или при
Обратное поле обуславливает знакопеременный момент (см. рис. 3.35, кривая 2). Результирующий момент (кривая 3) будет иметь провал при или при  . Наличие этого провала может вызвать затруднение пуска.
. Наличие этого провала может вызвать затруднение пуска.
С целью увеличения начального пускового момента, активное сопротивление короткозамкнутой обмотки следует выбирать по возможности максимальным. Но при этом уменьшается момент входа в синхронизм, то есть наибольший нагрузочный момент при котором СД, доведенный до подсинхронной частоты вращения, способен еще войти в синхронизм.
Достоинства СД.
1. СД способен работать при . Перевозбужденный СД потребляет из сети опережающий ток, что способствует улучшению коэффициента мощности сети.
2. На СД оказывает меньшее влияние колебания напряжения сети, чем на АД. Действительно, у СД  , а у АД
, а у АД  .
.
3. Строго постоянная частота вращения независимо от режима работы.
Недостатки СД.
1. Более сложна конструкция. Необходимость в источнике постоянного тока для возбуждения.
2. Относительная сложность пуска СД.
3. Трудность регулирования частоты вращения.
Тем не менее, при мощностях более 200…300 кВт СД более предпочтителен, если не требуется регулировка частоты вращения.
poznayka.org
Синхронный двигатель состоит из статора с обмоткой, которая включается в сеть трехфазного тока и выполняет роль якоря машины, и ротора с обмоткой, которая получает питание от постороннего источника постоянного тока и выполняет роль индуктора машины.
Вращающий момент двигателя определяется по формуле

В синхронных двигателях с увеличением нагрузки частота вращения не меняется, а увеличивается угол 0, поэтому механическая характеристика будет абсолютно жесткой (рис. 7.4, а), а для определения величины моментов используют угловую характеристику синхронного двигателя (рис. 7.4,6)—зависимость М = Дв).
Из угловой характеристики видно, что в левой части ее с увеличением угла 0 момент вращения М увеличивается, в правой части с увеличением угла 0 момент уменьшается. Таким образом, устойчивая работа двигателя возможна только на левой части характеристики.

Обычно угол 0 — 20 - 30° соответствует номинальному моменту электродвигателя МНОм. Перегрузочная способность синхронного двигателя X = 2 ч- 2,5.
В зависимости от величины тока возбуждения двигатель может работать с cos q> меньше единицы (ток возбуждения меньше номинального) или равным единице (ток возбуждения равен номинальному). При перевозбуждении синхронный двигатель вырабатывает реактивную энергию и отдает ее в сеть переменного тока. Это свойство двигателя используется для улучшения cos ф сети.
Синхронные двигатели применяются для привода крупных, редко отключаемых машин (компрессоров, вентиляторов, насосов).
Регулирование частоты вращения двигателей переменного тока может быть осуществлено за счет изменения частоты тока, числа пар полюсов, включения в цепь ротора дополнительных активных сопротивлений, введения в цепь ротора дополнительной э. д. с. Для электродвигателей с короткозамкнутыми роторами возможности регулирования частоты вращения ограничены, так как изменение частоты тока требует установки дополнительного оборудования, изменение числа пар полюсов требует выполнения специальной обмотки в статоре и пересоединения ее в процессе эксплуатации, а включение дополнительных сопротивлений в цепь ротора выполнить невозможно.
Практически нерегулируем и синхронный двигатель, а в электродвигателях с фазным ротором регулирование частоты вращения достигается за счет ввода в цепь ротора дополнительных активных сопротивлений. Данный способ неэкономичен, так как расходуется электроэнергия на нагрев реостата и уменьшается мощность на валу двигателя.
alyos.ru
Cтраница 1
Механические характеристики синхронного двигателя в этом режиме подобны механическим характеристикам динамического торможения асинхронных двигателей. [1]
Механическая характеристика синхронного двигателя представляет прямую, параллельную оси абсцисс ( ряс. При изменении нагрузки двигателя изменяется угол б между осью основного потока ротора и результирующего потока статора. [3]
Рассмотрим теперь механическую характеристику синхронного двигателя. [4]
Что называется механической характеристикой синхронного двигателя и как она строится. [5]
Какой вид имеет механическая характеристика синхронного двигателя. [6]
Основным отличительным свойством механической характеристики синхронного двигателя является ее абсолютная жесткость. При неизменной частоте питающего тока скорость вращения ротора машины остается строго постоянной с изменением нагрузочного момента от нуля до выпадения из синхронизма. Таким образом, механическая характеристика синхронного двигателя имеет вид прямой, параллельной оси абсцисс, если по горизонтали отложить вращающий момент, развиваемый двигателем, а по оси ординат-скорость. [7]
Чем объясняется жесткость механической характеристики синхронного двигателя. [8]
Представленная на рис. 14 механическая характеристика синхронного двигателя типа ВДС 325 / 29 - 24 мощностью 2 000 кет на номинальное напряжение 10 кв, предназначенного для привода крупного вертикального водяного насоса, рассчитана на легкие условия пуска насосного агрегата. Механическая характеристика насоса ( линия IV на рис. 14) в диапазоне изменений скольжений асинхронного пуска лежит ниже характеристики двигателя, благодаря чему обеспечивается нормальный пуск насосного агрегата. [9]
На рис. 13 - 11 приведена механическая характеристика синхронного двигателя. [11]
На рис. 13 - 13 приведена механическая характеристика синхронного двигателя. [12]
На рис. 13 - 18 приведена механическая характеристика синхронного двигателя. [14]
Какая из характеристик рис. 11.13 является механической характеристикой синхронного двигателя. [15]
Страницы: 1 2
www.ngpedia.ru









