Содержание
Способы управления двигателями
Управление коллекторными электродвигателями постоянного тока
Из уравнения скорости электродвигателя постоянного тока видно, что частота вращения коллекторного электродвигателя постоянного тока напрямую связана с величиной напряжения питания прикладываемого к двигателю и момента нагрузки.
- где — угловая частота, рад/с,
- U — напряжение питания, В,
- – постоянная ЭДС, В∙с/рад,
- M — момент электродвигателя, Н∙м,
- — механическая жесткость двигателя.
Таким образом скорость вращения коллекторного двигателя постоянного тока изменяется посредством изменения величины напряжения питания.
Управление универсальными двигателями
Универсальный коллекторный двигатель может быть подключен как к сети постоянного тока, так и к сети переменного тока. Так же как и у коллекторного двигателя постоянного тока, скорость универсального двигателя управляется величиной напряжения питания, а не его частотой.
Управление бесщеточными электродвигателями переменного тока
Электроприводы с электродвигателем переменного тока наиболее часто используются в составе: насосов, вентиляторов, компрессоров, станков и других механизмов, для которых важно поддерживать скорость вращения вала двигателя, либо определенный технологический параметр.
Основным элементом современного электропривода является система управления электродвигателем: частотный преобразователь или сервопривод.
Преобразователь частоты позволяет управлять моментом и скоростью вращения электродвигателя и исполнительного механизма.
Сервопривод позволяет точно управлять угловым положением, скоростью и ускорением исполнительного механизма.
При этом современные высокопроизводительные методы управления двигателями переменного тока используемые в современных частотных преобразователях и в сервоприводах имеют единую концепцию управления — векторное управление.
Скалярное управление
Скалярный метод управления обеспечивает постоянное отношение амплитуды напряжений обмоток статора к частоте. Такой метод позволяет контролировать скорость вращения электродвигателя в диапазоне до 1:10. Метод прост в реализации и подходит для большинства задач управления двигателем, где не требуется высокая динамика работы. Медленный отклик при переходном процессе связан с тем, что данный метод контролирует величину напряжения и частоты вместо управления фазой и величиной тока.
Такой метод позволяет контролировать скорость вращения электродвигателя в диапазоне до 1:10. Метод прост в реализации и подходит для большинства задач управления двигателем, где не требуется высокая динамика работы. Медленный отклик при переходном процессе связан с тем, что данный метод контролирует величину напряжения и частоты вместо управления фазой и величиной тока.
Векторное управление
Векторное управление позволяет управлять не только амплитудой и частотой, но и фазой управляющих напряжений. Таким образом данный метод обеспечивает максимальное быстродействие и регулирование во всем диапазоне скоростей, что невозможно выполнить с помощью скалярного управления. Недостатками данного метода является сложность реализации и более высокая цена, связанная с необходимостью использования более мощного микроконтроллера. Данный способ управления используется в таких задачах, как: робототехника, беспилотные аппараты, электрические транспортные средства, устройства автоматики и др.
ВКЛЮЧЕНИЕ И УПРАВЛЕНИЕ ЭЛЕКТРОДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА
Главная » Электрические схемы тепловозов
Все электродвигатели переменного тока асинхронные с корот-козамкнутым ротором. Включение каждого из них на переменное напряжение тягового генератора аналогично, а защита их от токов короткого замыкания и перегрузок осуществляется автоматами 1АВ-4АВ, 1АТ-2АТ и АВУ (см. рис. 2). Для равномерного распределения нагрузки па напряжение одной звезды статора 2С1-2СЗ тягового генератора включены мотор-вентиляторы холодильной камеры 1МВ, ЗМВ и электродвигатель вентилятора охлаждения тяговых двигателей задней тележки 2МТ. На напряжение другой звезды статора 1С1-1СЗ включены мотор-вентиляторы 4МВ и 2МВ, электродвигатель вентилятора охлаждения тяговых двигателей передней тележки 1МТ и электродвигателя вентилятора охлаждения выпрямительной установки ВВУ.
При работе тепловоза напряжение тягового генератора изме. реключаются со «звезды» на «треугольник» и наоборот. Переключение обмоток электродвигателей производится контакторами К13-К73 и К1Т-К7Т.
реключаются со «звезды» на «треугольник» и наоборот. Переключение обмоток электродвигателей производится контакторами К13-К73 и К1Т-К7Т.
Включенное положение контакторов К13-К73 при отклгачен-7 пых К1Т-К7Т соответствует соединению обмоток электродвигателей в «звезду»; включенное положение контакторов К1Т-К7Т при отключенных К13-К73 — в «треугольник». Одновременное включение этих контакторов исключается введением в цепи катушек контакторов размыкающих вспомогательных контактов для первых К1Т-К7Т, для вторых — К13-К73.
Переключением контакторов управляет полупроводниковый блок переключения асинхронных электродвигателей БПЭ. Блок [.мест реле, контакты которого подают питание на катушки кон • акторов К53-К73, К5Т-К7Т и па катушку реле повторителя 3У14. Реле РУ14 переключает контакторы К13-1(43 и К1Т-К4Т >лок переключения БПЭ питается фазным напряжением тягового еиератора (519, 518, 514, 2001, 517) и постоянным напряжением (епей управления от автомата А1 (535, 2209).
Катушка контакторов К53-1(73 и К5Т-К7Т, а также катушка реле РУ14 питаются от автомата А1 «Возбудитель». Катушки.онтакторов 1(13-1(43 и К1Т-К4Т питаются от автомата А6 Управление холодильником» и включаются при помощи системы ‘правления холодильником. Поэтому включение мотор-вентиля-«»ров 1МВ-4МВ производится при помощи «ручной» или автоматической схем управления холодильником в зависимости от мпературы в охлаждающих системах дизеля.
Катушки.онтакторов 1(13-1(43 и К1Т-К4Т питаются от автомата А6 Управление холодильником» и включаются при помощи системы ‘правления холодильником. Поэтому включение мотор-вентиля-«»ров 1МВ-4МВ производится при помощи «ручной» или автоматической схем управления холодильником в зависимости от мпературы в охлаждающих системах дизеля.
В области низкого напряжения тягового генератора контакты еле БПЭ и реле РУ14 подают питание на катушки контакторов ‘.’7″-К7Т и соединяют все обмотки асинхронных электродвигателей «треугольником». При переходе в область высокого напряжения контакты БПЭ и РУ14 включают катушки контакторов КІЗ-К73 и обмотки электродвигателей включаются «звездой».
⇐Предыдущая Оглавление Следующая⇒
Как контролировать скорость электродвигателя переменного тока
27.11.2019
Несколько вариантов управления электродвигателями переменного тока
Двигатель переменного тока представляет собой электродвигатель, приводимый в действие переменным током (AC), и состоит из двух основных частей: внешнего статора с катушками, на которые подается переменный ток для создания вращающегося магнитного поля, и внутреннего ротора, прикрепленного к выходному валу, создающего второе вращающееся магнитное поле. Возможность управления скоростью двигателя имеет множество преимуществ, и в этом руководстве рассматриваются различные способы управления скоростью двигателя.
Возможность управления скоростью двигателя имеет множество преимуществ, и в этом руководстве рассматриваются различные способы управления скоростью двигателя.
Как отмечалось выше, управление скоростью электродвигателя переменного тока имеет множество преимуществ, включая снижение звукового шума, энергоэффективность и улучшенный контроль над приложением двигателя. Несмотря на то, что они являются устройствами с постоянной скоростью, скорость двигателя переменного тока может изменяться при изменении частоты, входного напряжения или обмоток, которые заставляют двигатель вращаться.
Использование инверторов в качестве источника питания
Распространенным и эффективным способом изменения скорости двигателя является изменение частоты с помощью инвертора в качестве источника питания. Благодаря технологическим достижениям и снижению стоимости инверторов это часто используемый и популярный вариант. Методы, включающие снижение напряжения на обмотках двигателя с помощью трансформаторов, резисторов или отводов обмотки двигателя, также используются до сих пор.
Если вы планируете использовать инвертор для питания электродвигателя переменного тока, важно выбрать тот, который может обеспечивать не только напряжение и рабочий ток двигателя, но и пусковой ток. Используйте необходимый диапазон изменения скорости, чтобы выбрать диапазон частот, который должен обеспечивать инвертор. Элементы управления инвертора можно использовать для изменения частоты, подаваемой на двигатель, и скорость двигателя будет соответственно изменяться.
Если абсолютно точное управление скоростью не является критичным для применения двигателя, можно также добавить переменное сопротивление в цепь двигателя для снижения напряжения на основной обмотке. «Пробуксовка» двигателя — разница между синхронной скоростью магнитного поля электродвигателя и частотой вращения вала, обычно близкая к нулю, будет возрастать, так как на двигатель подается пониженная мощность. Кроме того, полюса двигателя не получают достаточной мощности для создания силы, необходимой для поддержания их нормальной скорости, и в этом методе двигатель должен быть рассчитан на высокое скольжение.
Использование трансформатора переменного напряжения
Более эффективным вариантом является использование трансформатора переменного напряжения. Этот метод изменяет напряжение, подаваемое на основную обмотку, что приводит к высокому скольжению и уменьшению скорости управления напряжением. Трансформатор переменного напряжения имеет малые потери по сравнению с переменным резистором. Использование трансформатора может иметь ряд ответвлений, которые изменяют отношение напряжения для управления скоростью двигателя. Эти отводы можно переключать вручную, или трансформатор может быть оснащен переключателем отводов с электроприводом. Несмотря на это, скорость двигателя изменяется с дискретными приращениями, а конкретная конструкция зависит от установки, в которой используется трансформатор.
Другие методы управления скоростью двигателя переменного тока
Другой метод управления скоростью двигателя переменного тока заключается в использовании двигателя переменного тока с обмотками с ответвлениями для изменения скорости. Этот метод чаще всего используется в домашних вентиляторах с переключателями высокой, средней и низкой скорости . Эти двигатели имеют заданное количество отводов на основной обмотке, что позволяет им работать с различными напряжениями, приложенными к его магнитному полю. Количество отводов и скоростей, доступных для двигателя, обычно не превышает четырех. Точная скорость в таких типах приложений не критична, а управление скоростью с помощью этой опции очень экономично.
Этот метод чаще всего используется в домашних вентиляторах с переключателями высокой, средней и низкой скорости . Эти двигатели имеют заданное количество отводов на основной обмотке, что позволяет им работать с различными напряжениями, приложенными к его магнитному полю. Количество отводов и скоростей, доступных для двигателя, обычно не превышает четырех. Точная скорость в таких типах приложений не критична, а управление скоростью с помощью этой опции очень экономично.
Работа двигателя с частотно-регулируемым приводом (VFD)
Преобразователь частоты (VFD) является еще одним вариантом и представляет собой контроллер двигателя переменного тока, который приводит двигатель в действие путем изменения частоты и напряжения, подаваемого на него. Частота (или герц) напрямую связана со скоростью двигателя (об/мин), поэтому чем выше частота, тем выше скорость вращения. Если приложение двигателя не требует, чтобы он работал на полной скорости, можно использовать частотно-регулируемый привод для снижения частоты и напряжения в соответствии с требованиями нагрузки двигателя. Когда требования к скорости двигателя приложения изменяются, частотно-регулируемый привод эффективно снижает или увеличивает скорость двигателя в соответствии с требованиями к скорости. Использование частотно-регулируемого привода может обеспечить снижение энергопотребления и затрат, увеличение производительности за счет более строгого контроля процесса и продление срока службы оборудования при одновременном снижении требований к техническому обслуживанию.
Когда требования к скорости двигателя приложения изменяются, частотно-регулируемый привод эффективно снижает или увеличивает скорость двигателя в соответствии с требованиями к скорости. Использование частотно-регулируемого привода может обеспечить снижение энергопотребления и затрат, увеличение производительности за счет более строгого контроля процесса и продление срока службы оборудования при одновременном снижении требований к техническому обслуживанию.
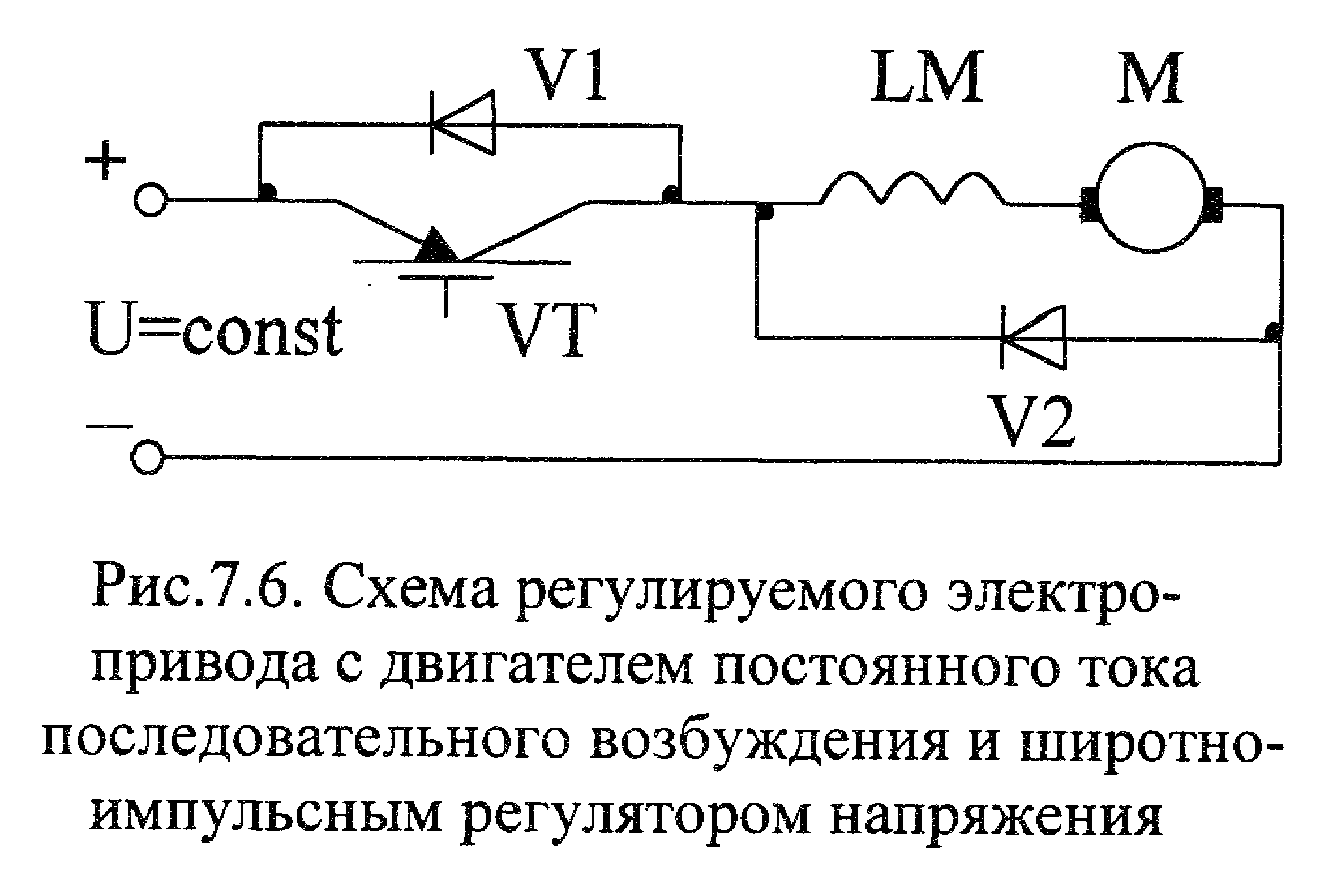
Широтно-импульсная модуляция
Наконец, регулирование величины напряжения на клеммах двигателя с помощью широтно-импульсной модуляции (ШИМ) также может управлять скоростью двигателя. Как следует из этого термина, ШИМ-управление скоростью работает, управляя двигателем с помощью быстрых серий импульсов «ВКЛ» и «ВЫКЛ» и изменяя рабочий цикл. Мощность, подаваемая на двигатель, регулируется изменением ширины этих приложенных импульсов, что, в свою очередь, изменяет среднее напряжение, подаваемое на клеммы двигателя. Модулируя или изменяя синхронизацию этих импульсов, можно управлять скоростью двигателя. Таким образом, чем дольше импульс «ВКЛ», двигатель будет вращаться быстрее, и, наоборот, чем короче время «ВКЛ» импульса, тем медленнее будет вращаться двигатель.
Модулируя или изменяя синхронизацию этих импульсов, можно управлять скоростью двигателя. Таким образом, чем дольше импульс «ВКЛ», двигатель будет вращаться быстрее, и, наоборот, чем короче время «ВКЛ» импульса, тем медленнее будет вращаться двигатель.
С помощью нескольких простых настроек или изменений можно управлять скоростью электродвигателя переменного тока. Посетите Zoro.com, чтобы узнать о широком ассортименте регуляторов скорости переменного тока от ведущих поставщиков.
Соответствие и пригодность продукта
Информация о продукте, содержащаяся в данном руководстве, предназначена только для общих информационных целей. Такие заявления о продукте не являются рекомендацией продукта или заявлением относительно уместности, точности, полноты, правильности или актуальности предоставленной информации. Информация, представленная в этом руководстве, не заменяет использование вами каких-либо инструкций производителя, технических руководств по продукту или других доступных вам профессиональных ресурсов или консультантов. Всегда читайте, понимайте и следуйте всем инструкциям производителя.
Всегда читайте, понимайте и следуйте всем инструкциям производителя.
Контроллеры двигателей | Curtis Instruments
AC F2-A
Этот контроллер двигателя переменного тока использует два высокопроизводительных микропроцессора ARM Cortex в компактном корпусе для обеспечения непревзойденной производительности и очень гибкого набора функций.
Модель AC F2-A оптимизирована для использования в качестве контроллера тяги на гидравлических тележках класса III грузоподъемностью 1,0–2,0 тонны. Контроллер также подходит для управления тягой или гидравлическим насосом на других типах транспортных средств с аккумуляторным питанием. Разработчики транспортных средств могут определять и контролировать динамические характеристики трансмиссии транспортных средств. Модель AC F2-A также является мощным системным контроллером, который может работать в качестве управляющего устройства на шине CAN.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный постоянный ток (BLDC)
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
12 В
24 В
36 В
48 В
Максимальный ток
240Arms
AC F2-C
Curtis Model AC F2-C представляет собой интегрированный контроллер системы тяги переменного и постоянного тока. Этот контроллер двигателя переменного тока F2-C (инвертор) в сочетании с полумостовым гидравлическим насосом постоянного тока и системой управления пропорциональным клапаном использует двойной высокий уровень 9.0049
Этот контроллер двигателя переменного тока F2-C (инвертор) в сочетании с полумостовым гидравлическим насосом постоянного тока и системой управления пропорциональным клапаном использует двойной высокий уровень 9.0049
производительность Микропроцессоры ARM Cortex в компактном корпусе обеспечивают непревзойденную производительность и очень гибкий набор функций.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный постоянный ток (BLDC)
Применение/Функция
Traction
Комбинированный насос AC Traction и DC
Диапазон номинального напряжения (В пост. тока)
24 В
36 В
48 В
Максимальный ток
280Arms-280A
AC F2-T/AC F2-D
Модель Curtis AC F2-T объединяет три отдельных контроллера двигателя в компактном прочном устройстве. AC F2-T обеспечивает независимое управление двумя асинхронными двигателями переменного тока или тяговыми двигателями PMAC, а также управление двигателем гидравлического насоса постоянного тока. Curtis Model AC F2-D предлагает версию только с двойной тягой без управления насосом постоянного тока.
Curtis Model AC F2-D предлагает версию только с двойной тягой без управления насосом постоянного тока.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный DC (BLDC)
Применение/Функция
Traction
Комбинированный насос AC Traction и DC
Диапазон номинального напряжения (В пост. тока)
24 В
36 В
48 В
Максимальный ток
240Arms+280A
AC F4-A
Контроллер двигателя Curtis модели AC F4-A обеспечивает точное управление скоростью и крутящим моментом трехфазных асинхронных двигателей переменного тока и двигателей PMAC.
AC F4-A использует два высокопроизводительных микропроцессора ARM Cortex для обеспечения максимально возможного уровня функциональной безопасности, обеспечивая при этом высокоэффективное управление двигателем и гибкие возможности управления системой.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный постоянный ток (BLDC)
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
500Arms
AC F6-A
Контроллер двигателя Curtis модели AC F6-A обеспечивает точное управление скоростью и крутящим моментом трехфазных асинхронных двигателей переменного тока, двигателей переменного тока и двигателей постоянного тока с постоянным током.
AC F6-A использует два высокопроизводительных микропроцессора ARM Cortex для обеспечения максимально возможного уровня функциональной безопасности, обеспечивая при этом высокоэффективное управление двигателем и гибкие возможности управления системой.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный постоянный ток (BLDC)
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
12 В
24 В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
450Arms-650Arms
AC F10-A
Контроллер двигателя AC F10-A компании Curtis обеспечивает точное управление скоростью и крутящим моментом трехфазных асинхронных двигателей переменного тока, двигателей постоянного тока с постоянным током и двигателей постоянного тока. AC F10-A использует два высокопроизводительных микропроцессора ARM Cortex для обеспечения максимально возможного уровня функциональной безопасности, обеспечивая при этом высокоэффективное управление двигателем и гибкие возможности управления системой.
AC F10-A использует два высокопроизводительных микропроцессора ARM Cortex для обеспечения максимально возможного уровня функциональной безопасности, обеспечивая при этом высокоэффективное управление двигателем и гибкие возможности управления системой.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный постоянный ток (BLDC)
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
12 В
24 В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
550Arms-1000Arms
HVi F5-R
Контроллер двигателя переменного тока Curtis модели HVi F5-R имеет диапазон рабочего напряжения 150–525 В, пиковую мощность 200 А и непрерывную мощность 100 А. Модель HVi F5-R обеспечивает точное управление скоростью и крутящим моментом трехфазных асинхронных двигателей переменного тока и двигателей PMAC.
HVi F5-R имеет архитектуру категории 2 функциональной безопасности. Контроллер предназначен для гибридных систем с электрической тягой, гидравлическим насосом и генератором на двигателе (OEG) в мобильном оборудовании, таком как погрузочно-разгрузочные машины, мобильные подъемные рабочие платформы, наземная поддержка аэропортов и строительная техника.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
200 В постоянного тока+
Максимальный ток
200A
1222
Модель Curtis 1222 представляет собой контроллер асинхронного двигателя переменного тока для систем рулевого управления с электроусилителем, управляемых по проводам. В этих системах двигатель рулевого управления функционирует как исполнительный механизм для изменения угла поворота управляемого колеса (колес) транспортного средства и, таким образом, изменения направления движения.![]()
Тип двигателя
Индукция переменного тока
Применение/Функция
Электронный усилитель рулевого управления (EPS)
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
70Arms
1232E
Модель Curtis 1232E обеспечивает расширенное управление асинхронными двигателями переменного тока, выполняющими функции тягового привода или гидравлического насоса, и обеспечивает высочайший уровень функциональной безопасности.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
150Arms
1232SE
В контроллерах переменного тока Curtis ‘SE’ используются новейшие технологии для увеличения номинального пикового тока для каждого размера контроллера. Для данного рейтинга модели SE меньше по размеру и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Для данного рейтинга модели SE меньше по размеру и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
375Arms
1234E
Модель Curtis 1234E обеспечивает расширенное управление асинхронными двигателями переменного тока, выполняющими функции тягового привода или гидравлического насоса, и обеспечивает высочайший уровень функциональной безопасности
Тип двигателя
Индукция переменного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
250Arms
1234SE
В контроллерах переменного тока Curtis ‘SE’ используются новейшие технологии для увеличения номинального пикового тока для каждого размера контроллера. Для данного рейтинга модели SE меньше по размеру и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Для данного рейтинга модели SE меньше по размеру и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
500Arms
1236E
Модели Curtis 1236E и 1238E обеспечивают улучшенное управление асинхронными двигателями переменного тока, выполняющими функции тягового привода или гидравлического насоса. Они предлагают разработчикам транспортных средств очень экономичное сочетание мощности, производительности и функциональности
Тип двигателя
Индукция переменного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
350Arms
1236SE
Контроллеры переменного тока Curtis ‘SE’ используют новейшие технологии для увеличения номинального пикового тока для каждого размера контроллера. Для данного рейтинга модели SE меньше по размеру и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Для данного рейтинга модели SE меньше по размеру и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
650Arms
1238E
Модели Curtis 1236E и 1238E обеспечивают улучшенное управление асинхронными двигателями переменного тока, выполняющими функции тягового привода или гидравлического насоса. Они предлагают разработчикам транспортных средств очень экономичное сочетание мощности, производительности и функциональности.
Тип двигателя
Индукция переменного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
800Arms
1238SE
Контроллеры переменного тока Curtis ‘SE’ используют новейшие технологии для увеличения номинального пикового тока для каждого размера контроллера. Для данного рейтинга модели SE меньше по размеру и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Для данного рейтинга модели SE меньше по размеру и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
1000Arms
1239E
Модель Curtis 1239E с изолированной логикой 12 В обеспечивает энергоэффективное управление асинхронными асинхронными двигателями переменного тока, выполняющими функции тягового привода на транспортном средстве. Он предлагает разработчикам транспортных средств экономически эффективное сочетание мощности, производительности и функциональности.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
72 В
80 В
84 В
96 В
108 В
120 В
144 В
Максимальный ток
650Arms
1266
Контроллеры Curtis Model 1266 A/R SepEx® являются программируемыми и микропроцессорными, с усовершенствованной силовой секцией MOSFET для плавного и плавного управления двигателями с независимым возбуждением.
Тип двигателя
SepEx®
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
36 В
48 В
Максимальный ток
350A
1268
Контроллеры Curtis PMC модели 1268 SepEx® являются программируемыми и микропроцессорными, с усовершенствованной силовой секцией MOSFET для плавного и плавного управления двигателями с независимым возбуждением.
Тип двигателя
SepEx®
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
36 В
48 В
Максимальный ток
500A
1212
Контроллер скорости двигателя Curtis модели 1212 обеспечивает точное и плавное управление приводными двигателями с постоянными магнитами для транспортных средств с аккумуляторным питанием.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
70A
1212BL
Контроллеры скорости двигателя Curtis модели 1212BL обеспечивают эффективное и оптимальное управление бесщеточными двигателями постоянного тока (BLDC) для транспортных средств с аккумуляторным питанием. Модель 1212BL оптимизирована для использования на малых/микротележках класса III и подметальных машинах для ухода за полами. Широкие возможности программирования позволяют использовать контроллеры модели 1212BL в любых маломощных двигателях BLDC.
Тип двигателя
Бесщеточный DC (BLDC)
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
36 В
48 В
Максимальный ток
70A
1212C
Контроллер скорости двигателя Curtis модели 1212C обеспечивает эффективное и оптимальное управление приводными двигателями с постоянными магнитами для промышленных транспортных средств с батарейным питанием.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
90A
1212E
Контроллеры двигателей Curtis модели 1212E обеспечивают эффективное и оптимальное управление двигателями с щеточными постоянными магнитами (PM) для транспортных средств с аккумуляторным питанием. Модель 1212E оптимизирована для использования на тележках с поддонами класса III малой грузоподъемности и машинах для ухода за полом, таких как подметальные машины и поломоечные машины.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
90A
1212P
Контроллер скорости двигателя Curtis модели 1212P обеспечивает эффективное и оптимальное управление приводными двигателями с постоянными магнитами для промышленных транспортных средств с батарейным питанием.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
90A
1212S
Контроллеры скорости двигателя Curtis моделей 1212P и 1212S обеспечивают эффективное и оптимальное управление приводными двигателями с постоянными магнитами для промышленных транспортных средств с батарейным питанием. Оптимизирован для использования на малотоннажных гидравлических тележках класса III и аналогичных электрических промышленных транспортных средствах. Программируемость преобразователей 1212P&S позволяет применять их в любых маломощных двигателях с постоянными магнитами.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
Максимальный ток
125A
1220
Curtis Model 1220 представляет собой контроллер щеточного электродвигателя постоянного тока с постоянными магнитами для электроусилителя рулевого управления, систем рулевого управления по проводам и работает только с контроллерами тяги переменного тока Curtis с поддержкой VCL. Двигатель рулевого управления работает как исполнительный механизм для изменения угла поворота колеса (колес), тем самым изменяя направление движения. Модель 1220 интерпретирует ввод команды рулевого управления и обратную связь о положении колеса, приводя в действие двигатель рулевого управления для перемещения колеса в желаемое положение.
Двигатель рулевого управления работает как исполнительный механизм для изменения угла поворота колеса (колес), тем самым изменяя направление движения. Модель 1220 интерпретирует ввод команды рулевого управления и обратную связь о положении колеса, приводя в действие двигатель рулевого управления для перемещения колеса в желаемое положение.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Электронный усилитель рулевого управления (EPS)
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
50A
1220E
Модель Curtis 1220E представляет собой контроллер щеточного двигателя постоянного тока с постоянными магнитами для электроусилителя рулевого управления и систем рулевого управления по проводам. Этот контроллер разработан исключительно для контроллеров тяги переменного тока с поддержкой Curtis Vehicle Control Language (VCL). Двигатель рулевого управления работает как исполнительный механизм для изменения траектории движения путем изменения угла поворота колес.
Двигатель рулевого управления работает как исполнительный механизм для изменения траектории движения путем изменения угла поворота колес.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Электронный усилитель рулевого управления (EPS)
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
Максимальный ток
70A
1229
Контроллер Curtis Model 1229 представляет собой контроллер для тяжелых условий эксплуатации, предназначенный для сложных тяговых приложений в неблагоприятных условиях. Он имеет степень защиты IP65 и использует передовую мощную двухмикропроцессорную логическую архитектуру, соответствующую стандарту EN ISO 13849.соответствия, а также имеет CANbus, 4 вспомогательных драйвера по 10 А и гибкую функцию сопоставления ввода-вывода.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
Максимальный ток
275А
1204М
Модели Curtis 1204M/1205M обеспечивают полностью программируемое управление двигателями постоянного тока, выполняющими тяговые или насосные функции. Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Тип двигателя
Серия
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
24В
36 В
48 В
60 В
72 В
Максимальный ток
500A
1205M
Модели Curtis 1204M/1205M обеспечивают полностью программируемое управление двигателями постоянного тока, выполняющими тяговые или насосные функции. Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Тип двигателя
Серия
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
Максимальный ток
500A
1209M
Модели Curtis 1209M/1221M обеспечивают полностью программируемое управление двигателями постоянного тока, выполняющими тяговые или насосные функции. Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Тип двигателя
Серия
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
36 В
48 В
60 В
72 В
Максимальный ток
450A
1216
Модель Curtis 1216 представляет собой высокорентабельный контроллер гидравлического насоса для использования с двигателями постоянного тока с последовательной обмоткой. Это обеспечивает исключительную ценность для автомобильных гидравлических насосов, таких как ножничные подъемники и другие типы мобильных подъемных рабочих платформ.
Тип двигателя
Серия
Применение/Функция
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
360A
1221M
Модели Curtis 1209M/1221M обеспечивают полностью программируемое управление двигателями постоянного тока, выполняющими тяговые или насосные функции. Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Тип двигателя
Серия
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
48 В
60 В
72 В
Максимальный ток
550A
1253
Модель 1253 представляет собой контроллер мощного гидравлического насоса, который обеспечивает как цифровой вход, так и аналоговое управление двигателями с обмоткой постоянного тока на основе дроссельной заслонки. Он имеет микропроцессорную логику с программируемыми параметрами и предлагает максимальную гибкость при минимальных затратах.
Тип двигателя
Серия
Применение/Функция
Насос
Диапазон номинального напряжения (В постоянного тока)
48 В
80 В
Максимальный ток
600A
1226
Контроллеры скорости двигателя Curtis модели 1226 обеспечивают эффективное и оптимальное управление приводными двигателями с постоянными магнитами для транспортных средств с аккумуляторным питанием. Оптимизировано для использования на тележках с поддонами класса III малой грузоподъемности и подметально-моечных машинах для ухода за полом. Очень гибкая программируемость позволяет применять их в любых маломощных двигателях с постоянными магнитами.
Оптимизировано для использования на тележках с поддонами класса III малой грузоподъемности и подметально-моечных машинах для ухода за полом. Очень гибкая программируемость позволяет применять их в любых маломощных двигателях с постоянными магнитами.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
Максимальный ток
150A
1226BL
Контроллеры скорости двигателя Curtis модели 1226BL обеспечивают эффективное и оптимальное управление бесщеточными приводными двигателями постоянного тока для транспортных средств с аккумуляторным питанием. Оптимизировано для использования на тележках с поддонами класса III малой грузоподъемности и подметально-моечных машинах для ухода за полом.