Содержание
Регулятор скорости двигателя постоянного тока
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Транзистор открывается на момент длительности импульса.
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет «воспринимать» среднее значение подводимой к нему энергии.
Существует много схем для генерации ШИМ сигнала. Одна из самых простых — это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
Напряжение питания схемы VCC может быть в диапазоне 5 — 16 Вольт. В качестве диодов VD1 — VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.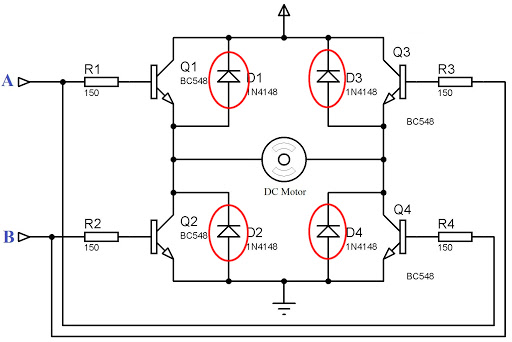
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе).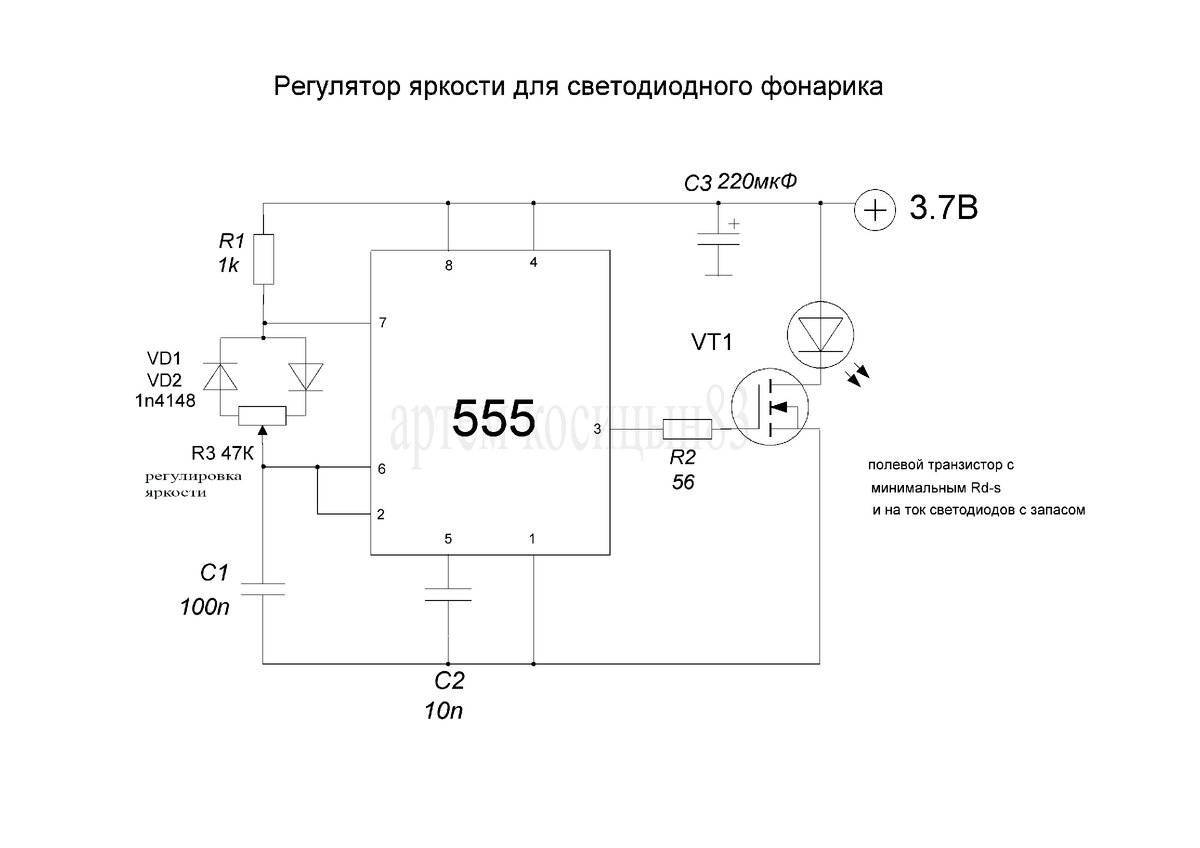 Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.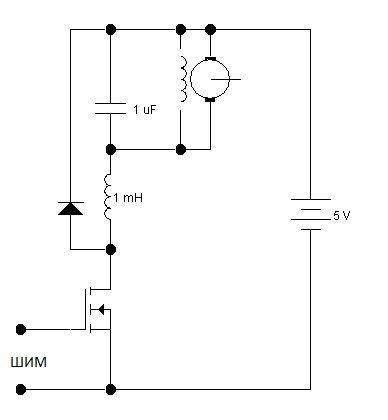 д.
д.
VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
ШИМ регулятор скорости двигателя постоянного тока
- Все статьи блога
- Радиолюбителю — конструктору
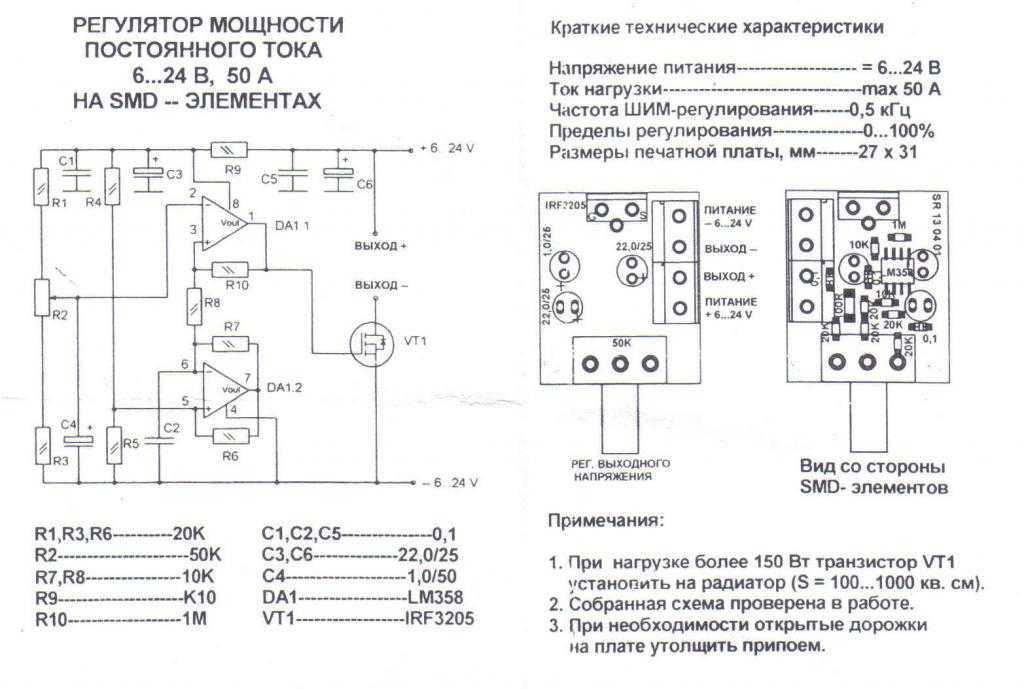
Регулировать скорость вращения небольших двигателей постоянного тока очень удобно посредством широтно-импульсной модуляции — ШИМ или PWM (pulse-width modulation). Предлагаемая схема управления очень проста и собрана всего на одном распространенном и дешевом чипе LM324. Эта микросхема содержит четыре одинаковых операционных усилителя в одном корпусе. Для реализации схемы ШИМ в общем случае необходим генератор напряжения треугольной формы и компаратор.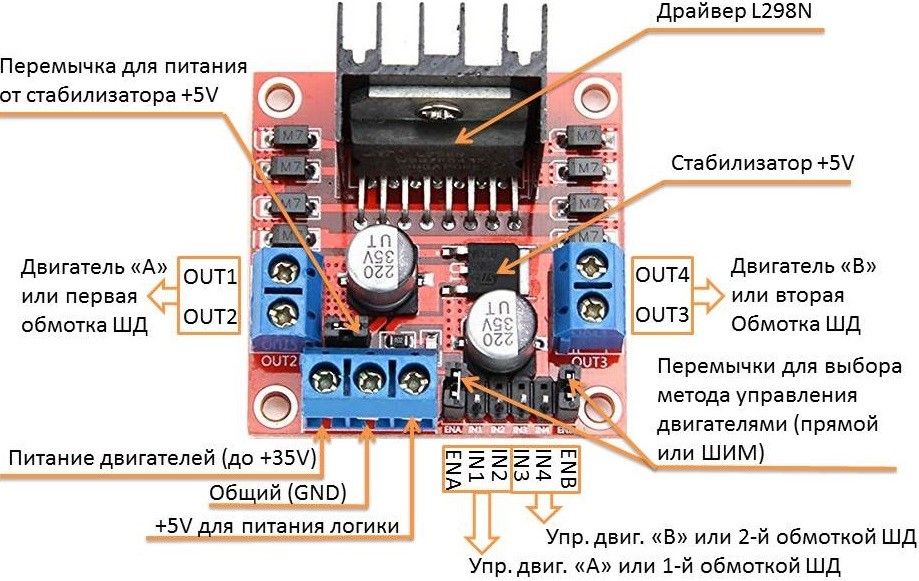 два из четырех ОУ микросхемы LM324 работают в генераторе, третий ОУ включен как компаратор. Четвёртый ОУ не используется. Никто не мешает вам использовать в этой схеме три одиночных операционных усилителя общего применения, например TL071 или один сдвоенный и один одинарный ОУ, к примеру, TL072 + TL071. В этом случае размер устройства, конечно, будет больше, чем в случае использования одно счетверенного ОУ.
два из четырех ОУ микросхемы LM324 работают в генераторе, третий ОУ включен как компаратор. Четвёртый ОУ не используется. Никто не мешает вам использовать в этой схеме три одиночных операционных усилителя общего применения, например TL071 или один сдвоенный и один одинарный ОУ, к примеру, TL072 + TL071. В этом случае размер устройства, конечно, будет больше, чем в случае использования одно счетверенного ОУ.
Генератор напряжения треугольной формы собран на ОУ N1 и N2 по известной схеме «интегратор-компаратор». На выходе компаратора на N2 (14) формируются прямоугольные импульсы частотой около 1.6 кГц, которые по цепи обратной связи подаются на инвертирующий вход (2) интегратора, собранного на ОУ N1 через резистор R1. С выхода интегратора (1) снимается сигнал треугольной формы с той же частотой 1.6 кГц. Треугольная волна поступает на неинвертирующий вход (5) компаратора, реализованного на ОУ N3. Одновременно на инвертирующий вход N3 поступает образцовое напряжение с движка потенциометра VR1, который входит в делитель напряжения R4, R5, VR1.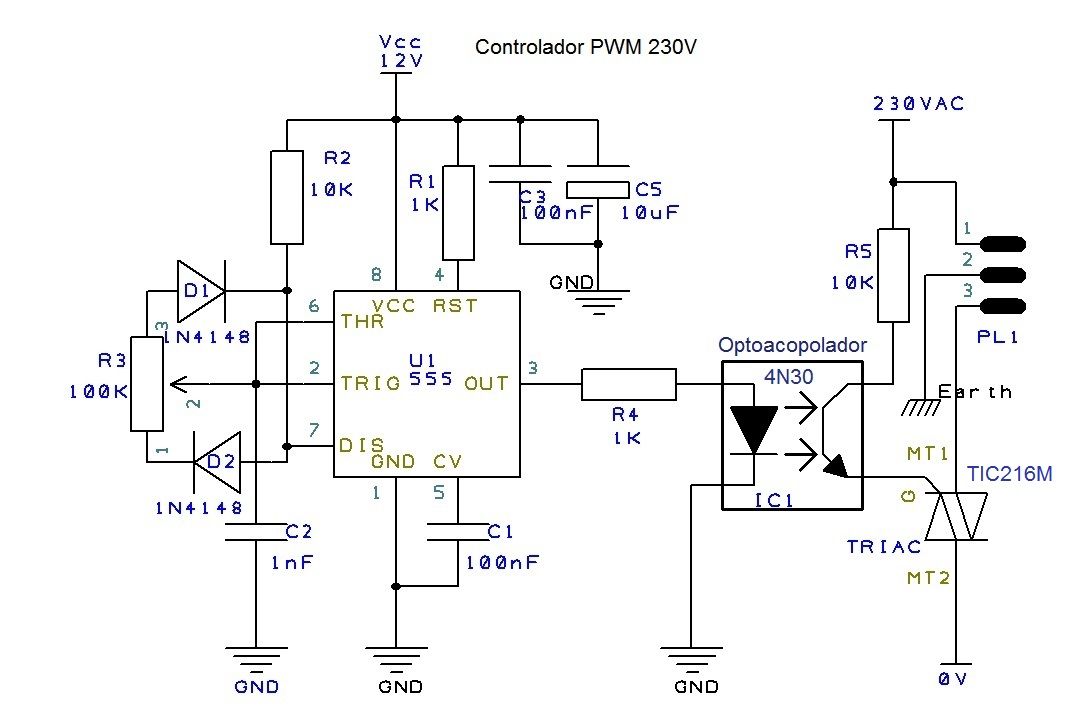
При указанных номиналах делителя напряжения и напряжении питания ∓12В, образцовое напряжение может принимать значения от -6 до +6 вольт, в зависимости от угла поворота оси потенциометра VR1. Компаратор N3 сравнивает треугольный сигнал на выводе 5 N3 с образцовым напряжением на выводе 6. если напряжение на выводе 5 больше напряжения на выводе 6, то на выходе N3 (7) появится высокий уровень напряжения около +12В. Когда напряжение на выводе 5 N3 станет меньше образцового на выводе 6, на выходе 7 N3 появится низкий уровень около -12В. Таким образом, при поступлении на вход 5 напряжения треугольной формы на выходе 7 будут формироваться прямоугольные импульсы с длительностью, зависящей от образцового напряжения на выводе 6 N3. Иными словами, мы сможем регулировать скважность прямоугольного сигнала на выходе N3, поворачивая движок потенциометра VR1.
Наглядно процесс показан на графике ниже. Зеленая линия — это образцовое напряжение. Прямоугольный сигнал синего цвета — это выходной сигнал компаратора.
ШИМ сигнал с выхода N3 подается га затвор MOSFET транзистора Т1. двигатель постоянного тока включен в цепь стока этого транзистора. Во время действия высокого уровня напряжения полевой транзистор открывается и подключает двигатель к источнику питания. Во время действия напряжения низкого уровня транзистор закрыт и мотор обесточен.
Поскольку это происходит со сравнительно высокой частотой, средний ток, протекающий через мотор зависит от скважности (длительности) прямоугольных импульсов. поступающих на затвор транзистора. Чем больше длительность импульса, тем больше будет средний ток, проходящий через двигатель и наоборот. таким образом происходит регулировка частоты вращения мотора.
Для работы схемы требуется двухполярный источник питания напряжением ∓12В. Схема может быть модифицированна для использования с двигателями постоянного тока, рассчитанными на напряжение от 6 до 24 вольт.м
circuit engineeringComparatorPWMкомпараторсхемотехникаШИМ
Управление щеточными двигателями постоянного тока с помощью ШИМ
Загрузите эту статью в формате PDF.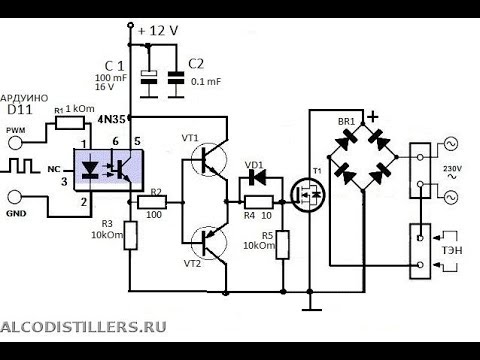
Многие приложения, использующие миниатюрные коллекторные двигатели постоянного тока, требуют, чтобы двигатели работали более чем в одной точке нагрузки или в течение определенных циклов нагрузки. Для запуска двигателя в рабочих точках нагрузки требуется переменный, управляемый источник питания. Это можно сделать с помощью непрерывного источника питания с линейной регулировкой или широтно-импульсной модуляции (ШИМ).
Линейное регулирование, как правило, неэффективно и требует большего корпуса. Более того, в приложениях с батарейным питанием нецелесообразно использовать линейное регулирование при различных точках нагрузки. ШИМ-регулирование напряжения, с другой стороны, является эффективным и может эффективно использоваться в приложениях с питанием от батареи или постоянного тока. Более высокая эффективность ШИМ-привода увеличивает срок службы батареи и снижает нагрев электронных компонентов.
Одним из недостатков использования ШИМ с двигателем являются потери на вихревые токи в обмотках ротора из-за непрерывного переключения ШИМ, которые, как правило, отсутствуют в линейных источниках питания.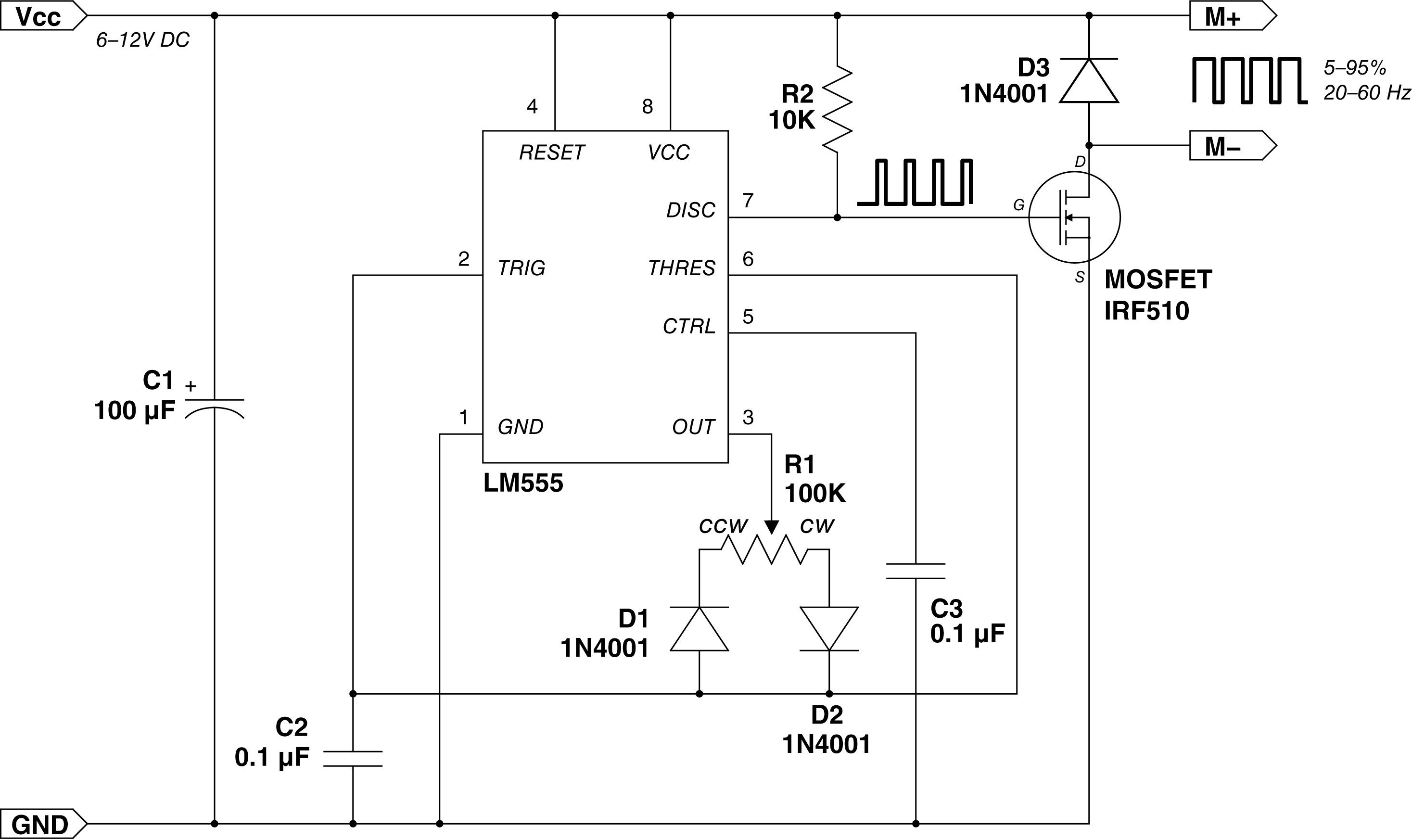 Однако правильно спроектированный ШИМ сводит к минимуму эффекты вихревых токов и улучшает работу двигателей.
Однако правильно спроектированный ШИМ сводит к минимуму эффекты вихревых токов и улучшает работу двигателей.
Коллекторные двигатели постоянного тока без сердечника имеют низкую инерцию и индуктивность. Это позволяет использовать их в приложениях, требующих динамического поведения и быстрой реакции двигателя. Использование ШИМ позволяет точно контролировать ток в обмотках. Следовательно, выходной крутящий момент, который линейно пропорционален среднему току обмотки, можно правильно регулировать в двигателях без сердечника.
В отличие от чисто резистивных нагрузок для двигателей постоянного тока, сопротивление, индуктивность и обратная ЭДС на обмотках ротора являются решающими факторами при оптимизации частоты ШИМ и рабочего цикла.
Линейный и ШИМ-источник питания
В линейном источнике постоянного тока (как показано на рисунке ниже) ток зависит только от сопротивления обмотки. Индуктивность не влияет на ток, как при постоянном источнике. Импеданс катушки индуктивности равен нулю.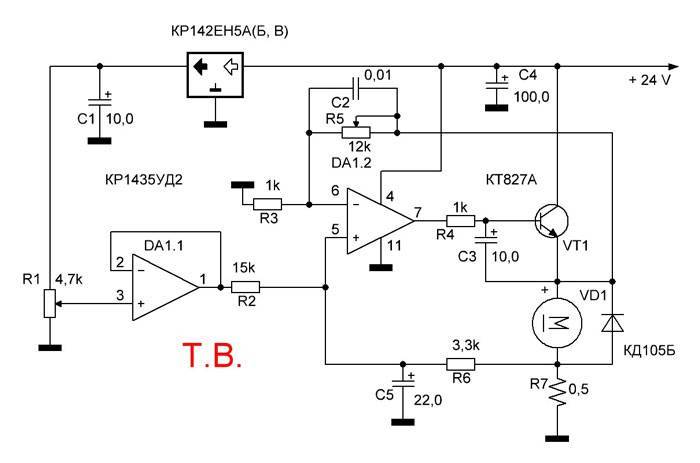
Значения по каталогу и прогнозируемый срок службы для большинства двигателей без сердечника оцениваются с использованием постоянного линейного источника питания постоянного тока.
При использовании источника ШИМ схема видит омическое сопротивление и индуктивность из-за частых переключений. Кроме того, на клемме создается противо-ЭДС, эквивалентная характеристикам двигателя (KE) и скорости. Это усложняет схему ШИМ при разработке ее для конкретного приложения, поскольку для достижения наилучших характеристик двигателя необходимо точно контролировать не только рабочий цикл, но и частоту ШИМ.
Когда двигатель находится в состоянии покоя или вращается с низкой скоростью, противо-ЭДС можно пренебречь. Упрощенная эквивалентная схема двигателя показана ниже.
Диод свободного хода или демпфирующий диод (параллельно клеммам двигателя на приведенной выше схеме) никогда не следует опускать при использовании переменного напряжения, такого как ШИМ. Диод позволяет рассеивать заряд без образования дуги при переключении.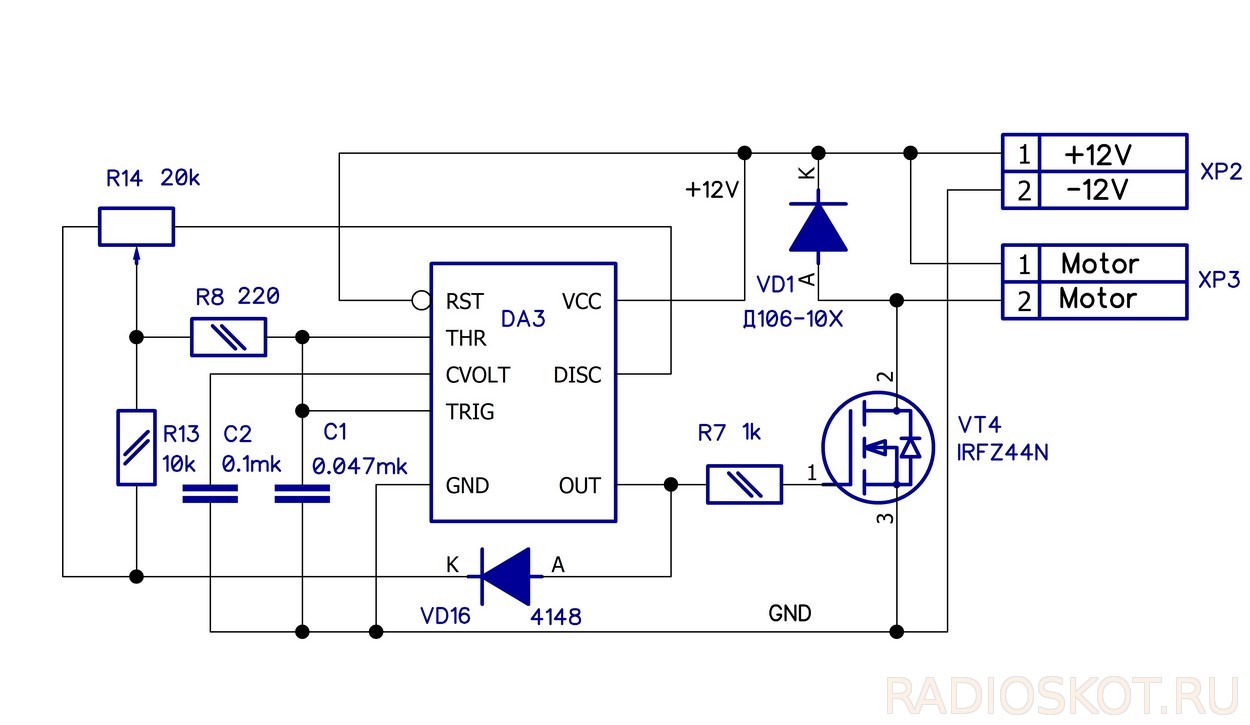
Когда двигатель работает на умеренно высокой скорости, противо-ЭДС сравнима с приложенным напряжением, поэтому в эквивалентную схему необходимо добавить составляющую, представляющую противо-ЭДС. Модифицированная эквивалентная схема показана ниже.
Обратная ЭДС вместе с цепью RL в щеточном двигателе постоянного тока вносит нелинейность в управление ШИМ, а частота ШИМ и рабочий цикл ШИМ становятся важными для получения наилучшей выходной мощности.
Когда ШИМ управляет двигателем и электромагнитная совместимость имеет решающее значение, рекомендуется анализировать эффекты излучения, поскольку излучаемая электромагнитная энергия обычно выше с ШИМ, чем с линейными источниками постоянного тока.
Вольт-амперные характеристики
Когда напряжение подается на цепь RL, дроссель противодействует току в цепи. В результате ток экспоненциально возрастает до установившегося значения, которое зависит от отношения двигателя L/R . На приведенном ниже графике показано экспоненциальное увеличение тока через обмотку в цепи RL.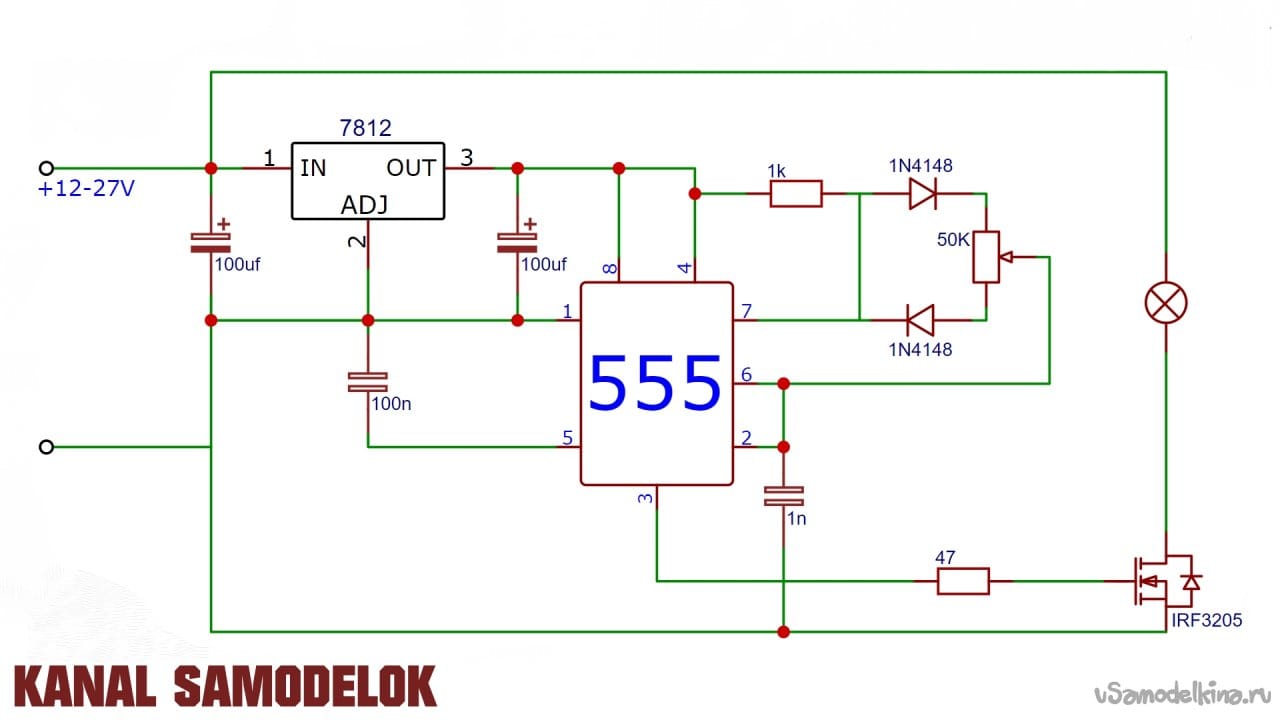 Когда приложенное напряжение снимается с цепи, ток медленно падает до нуля, затухая по экспоненциальному закону.
Когда приложенное напряжение снимается с цепи, ток медленно падает до нуля, затухая по экспоненциальному закону.
Константа L/R (она же постоянная времени для RL-цепи) определяет максимальную скорость изменения приложенного напряжения в цепи. Стационарное состояние после любого изменения приложенного напряжения достигается через период, равный нескольким постоянным времени. График тока двигателя (выше) показывает его экспоненциальный рост, что представляет собой идеальный сценарий. Пятикратная постоянная времени ( 5L/R ) обычно считается временем, необходимым для достижения устойчивого состояния. Однако при пятикратной постоянной времени схема находится на уровне около 99,33% от его максимального значения.
Пренебрегая противо-ЭДС для простоты, нарастание тока в простой RL-цепи можно представить как:
Где
I 0 — максимальный ток через RL-цепь при заданном напряжении; τ — постоянная времени цепи RL, определяемая как время, необходимое для достижения током значения 1/e, или около 63,21 % от максимального тока; а т это время.
После достижения устойчивого состояния, если источник питания отключен, ток через цепь RL спадает экспоненциально (как показано ниже).
Рекомендации по проектированию ШИМ
Когда привод ШИМ используется с щеточными двигателями постоянного тока, внутренняя индуктивность ротора действует как фильтр тока, что хорошо для схемы привода. Однако другие конструктивные параметры, такие как частота ШИМ и рабочий цикл, влияют на пульсации тока и, следовательно, на срок службы щеточной коммутации.
Когда ШИМ управляет двигателем, ток через двигатель увеличивается и падает с каждым периодом ШИМ. Игнорируя противо-ЭДС двигателя, нарастание тока является функцией индуктивности двигателя и общего сопротивления. Для каждого цикла ШИМ частота ШИМ должна быть выбрана таким образом, чтобы было достаточно времени, чтобы ток достиг своего установившегося значения, которое обычно превышает 5τ. На приведенном ниже графике показаны условия, когда частота ШИМ достаточна для достижения устойчивого состояния.
Когда частота ШИМ превышает пороговое значение, время включения и выключения ШИМ становится короче, чем время, необходимое для работы цепи RL и достижения установившегося состояния тока. Следовательно, ток колеблется между двумя неустановившимися значениями, что вызывает пульсации тока. На приведенном ниже графике показано состояние, когда частота ШИМ выше, чем время, необходимое для установившегося режима, и ток через двигатель колеблется.
С точки зрения конструкции пульсации тока должны быть уменьшены путем регулировки частоты возбуждения таким образом, чтобы выходной крутящий момент был почти линейным. Также рекомендуется поддерживать частоту ШИМ выше диапазона слышимости человека (выше 20 кГц), поскольку пульсации тока в этом диапазоне частот могут создавать шум во время работы двигателя.
Пульсация тока
Для определенных щеточных двигателей без сердечника пульсации тока должны быть как можно ниже. Как правило, пульсация ниже 10% считается низким значением. Более высокие пульсации влияют на производительность несколькими способами: Выходной крутящий момент двигателя пропорционален току, тогда как омический (резистивный) нагрев обмотки пропорционален квадрату тока. Таким образом, при пиковых токах преобладает нагрев обмоток, который снижает производительность и срок службы двигателя. В щеточных двигателях постоянного тока Portescap не используются пластины из железа, поэтому потери на вихревые токи и гистерезис в магнитной цепи прямо пропорциональны пульсациям тока и могут снизить общую производительность двигателя. При коммутации драгоценных металлов повышенная электроэрозия влияет на срок службы двигателя, поскольку электроэрозия пропорциональна коэффициенту L x I эфф 2 . где L — индуктивность, а I eff — эффективный ток через обмотку. При коммутации угольных щеток повышенная пульсация тока увеличивает накопление патины. (Патина или пленка — это слой оксида меди, образующийся на поверхности коллектора угольной щетки, который улучшает коммутацию и снижает трение.
Более высокие пульсации влияют на производительность несколькими способами: Выходной крутящий момент двигателя пропорционален току, тогда как омический (резистивный) нагрев обмотки пропорционален квадрату тока. Таким образом, при пиковых токах преобладает нагрев обмоток, который снижает производительность и срок службы двигателя. В щеточных двигателях постоянного тока Portescap не используются пластины из железа, поэтому потери на вихревые токи и гистерезис в магнитной цепи прямо пропорциональны пульсациям тока и могут снизить общую производительность двигателя. При коммутации драгоценных металлов повышенная электроэрозия влияет на срок службы двигателя, поскольку электроэрозия пропорциональна коэффициенту L x I эфф 2 . где L — индуктивность, а I eff — эффективный ток через обмотку. При коммутации угольных щеток повышенная пульсация тока увеличивает накопление патины. (Патина или пленка — это слой оксида меди, образующийся на поверхности коллектора угольной щетки, который улучшает коммутацию и снижает трение.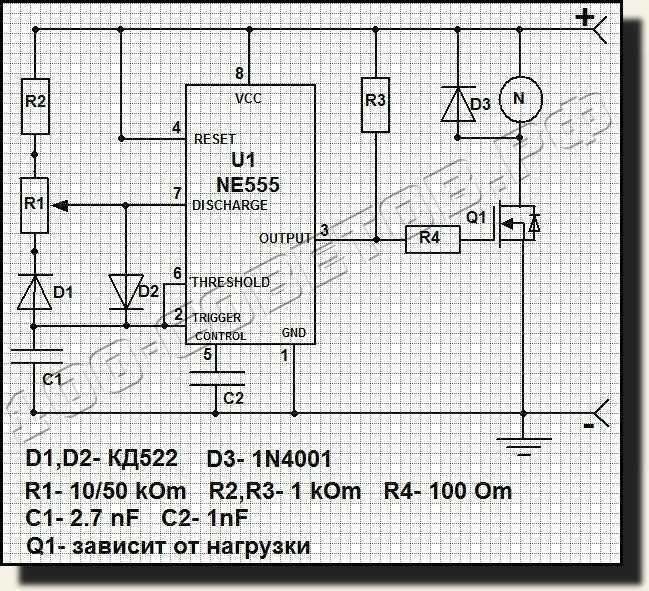 ) Следовательно, на более низких скоростях контакт щетки будет ухудшаться. На средних и высоких скоростях патина не окажет существенного влияния на работу двигателя.
) Следовательно, на более низких скоростях контакт щетки будет ухудшаться. На средних и высоких скоростях патина не окажет существенного влияния на работу двигателя.
Индуктивное напряжение на клемме может быть указано как:
Где L — индуктивность; U L — напряжение, генерируемое на катушке индуктивности; а T — бесконечно малое время, за которое ток изменяется на ∆I.
При работе двигателя с ШИМ напряжение на его клемме противодействует противо-ЭДС, генерируемой на клемме двигателя. Следовательно, уравнение 3 можно переписать как для нарастания, так и для падения тока в операциях ШИМ как:
и:
Где нижний индекс ON обозначает время «включения», а OFF обозначает время «выключения» импульса ШИМ, так что общее время Т P дается как:
Из уравнения. 5,
Вставка значения из уравнения. 7 в уравнение 4, мы получаем
T ON и T OFF в приведенном выше уравнении можно дать как
и
Где D — рабочий цикл ШИМ-сигнала.
Отсюда уравнение 8 можно переписать как:
Ур. 11 можно использовать для извлечения пульсаций тока в двигателе из-за ШИМ-сигнала с рабочим циклом D и частотой 1/T P .
Интересно отметить из уравнения. 11 видно, что пульсации тока максимальны, когда рабочий цикл составляет 50%. Следовательно, предлагается, чтобы проектировщики запускали двигатель вдали от зоны рабочего цикла 50%.
Кроме того, из приведенного выше уравнения пульсации тока зависят только от индуктивности двигателя, а не от электрической постоянной времени двигателя.
В идеале для двигателей без сердечника разница (U ON – U OFF ), иногда обозначаемая как ∆U, должна быть как можно меньше в зависимости от максимального входного напряжения двигателя и скорости применения.
Индуктивность двигателя на клеммах зависит от частоты ШИМ. Например, в каталоге указана индуктивность двигателя Portescap при частоте 1 кГц; но на частоте 100 кГц индуктивность может уменьшиться до 20% от каталожного значения.
По сравнению с двигателями с железным сердечником индуктивность двигателей без сердечника ниже в два раза. Кроме того, добротность хуже, так как в обмотках ротора отсутствуют железные пластины. Следовательно, ШИМ-привод с двигателем без сердечника будет иметь относительно более высокие потери и меньшую электронную стабильность.
Срок службы двигателя
В коллекторных двигателях постоянного тока наиболее распространенным видом отказа является износ щеток из-за коммутации. В течение срока службы двигателя щетки (угольно-графитовые или из драгоценных металлов) подпружинены и механически связаны с сегментами коллектора для зарядки катушек. Это делает износ щеток функцией механического трения, возникающего при скольжении щеток по сегментам коллектора, и электроэрозии, вызванной электрическими разрядами во время коммутации.
При использовании приводов ШИМ для работы двигателя с различными скоростями и нагрузками расчетный срок службы двигателя представляет собой сложную комбинацию различных факторов, влияющих на его износостойкость.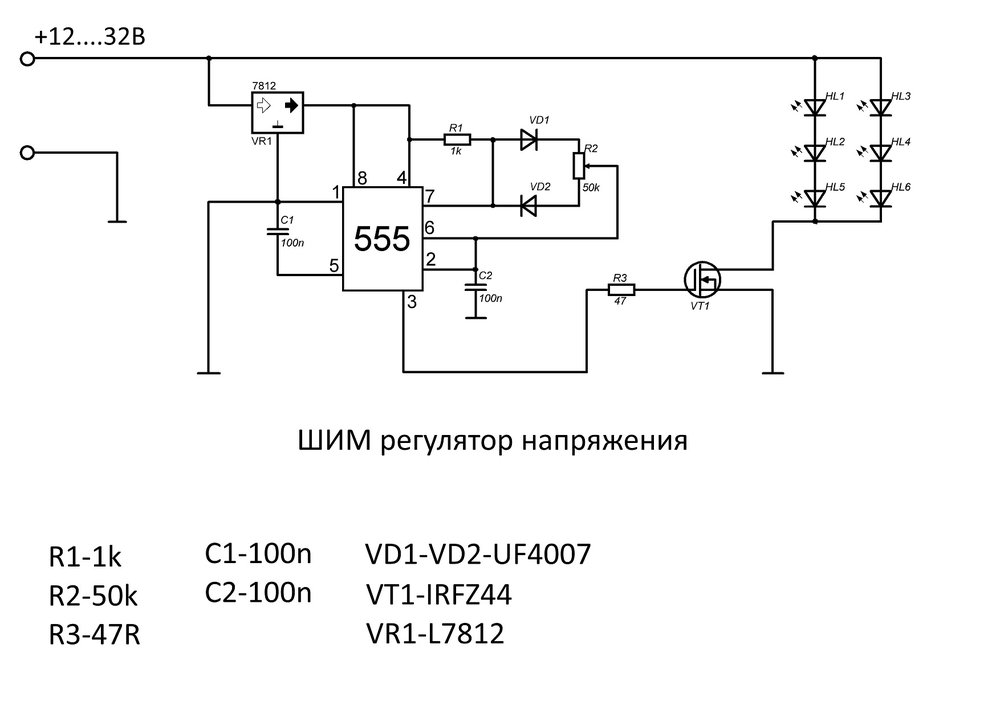 Эти факторы могут включать: Более высокую плотность тока в коммутации из-за снижения эффективности, высокого механического трения, недостаточной смазки или рециркуляции тока. Высокая электроэрозия при скачках тока при использовании источников ШИМ. Более высокая рабочая температура двигателя из-за условий окружающей среды или более высокая удельная мощность двигателя, что снижает качество смазки.
Эти факторы могут включать: Более высокую плотность тока в коммутации из-за снижения эффективности, высокого механического трения, недостаточной смазки или рециркуляции тока. Высокая электроэрозия при скачках тока при использовании источников ШИМ. Более высокая рабочая температура двигателя из-за условий окружающей среды или более высокая удельная мощность двигателя, что снижает качество смазки.
В зависимости от области применения и источника питания двигателя его ожидаемый срок службы может зависеть от одного или нескольких факторов, описанных выше.
Для конструкций двигателей, в которых точка нагрузки требует, чтобы двигатель работал с умеренными крутящим моментом и скоростью, без осевых и радиальных нагрузок, действующих на вал, и в умеренном диапазоне температур (обычно ниже 60°C), износ, как правило, обусловлен электромеханическими нагрузками. -эрозия. Тогда ресурс двигателя обратно пропорционален индуктивности и квадрату тока:
В приведенном выше уравнении рассматривается линейный источник или источник ШИМ с пульсациями тока, которые пренебрежимо малы по сравнению со средним током, протекающим через двигатель.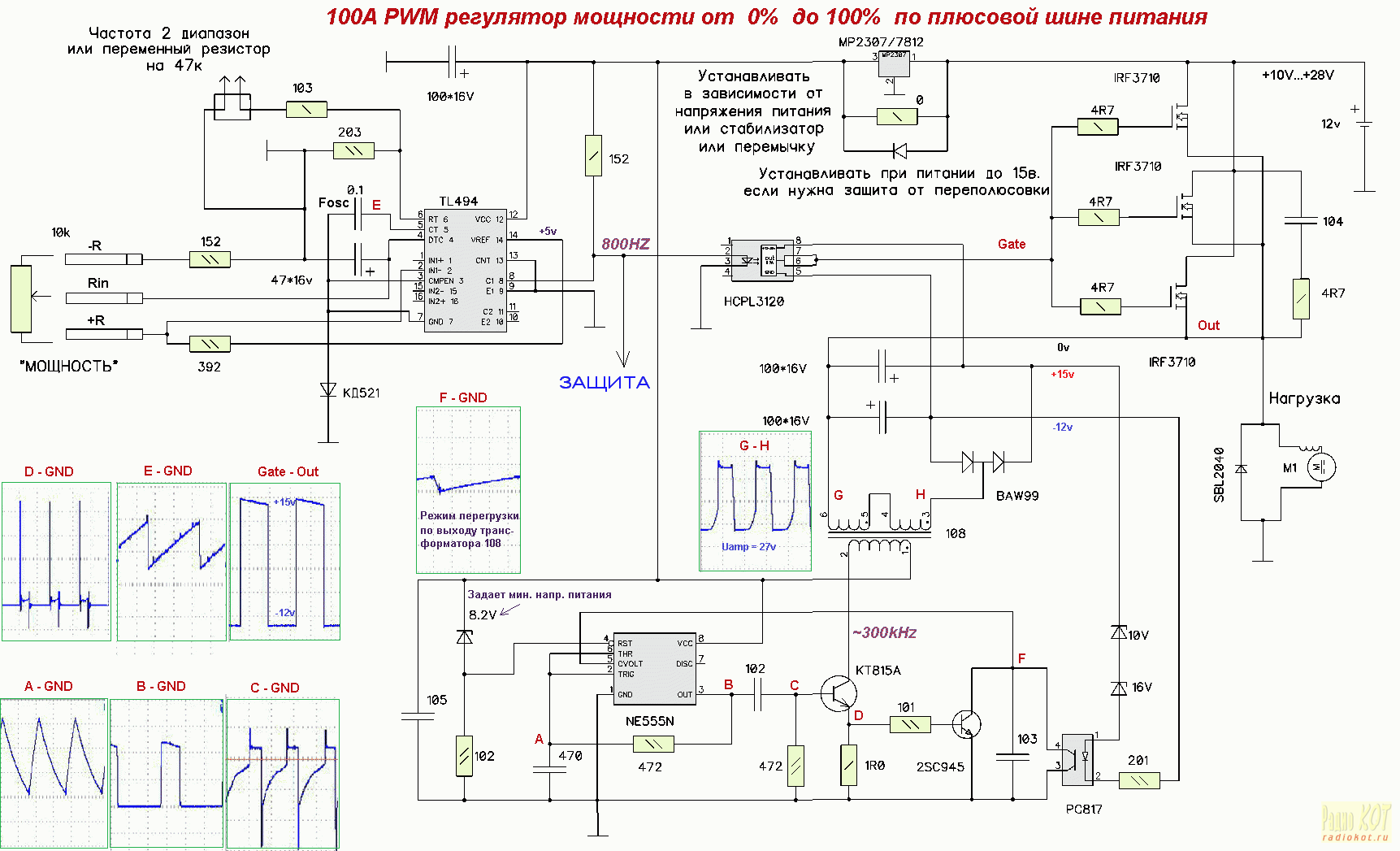 В практических сценариях пульсация может значительно сократить срок службы двигателя.
В практических сценариях пульсация может значительно сократить срок службы двигателя.
Случай 1: Пульсации тока менее 10 %. Чтобы уменьшить пульсации тока до уровня менее 10 % в коллекторных двигателях постоянного тока Portescap, диапазон частот может достигать 40–120 кГц.
С ШИМ, экв. 12 можно переписать так:
л потерь — потери в диоде и потери на вихревые токи и гистерезис на трубке двигателя. Эти потери снижают общий КПД двигателя. Тем не менее, хорошая конструкция обеспечивает КПД ШИМ от 85 до 90%.
Из уравнения. 12 и 13, и с учетом l потерь как 10% от I двигателя .
Тогда:
Следовательно, при эффективности ШИМ 90 %
Случай 2: Пульсации тока значительны. Уравнение 14 остается верным, когда я потери низки по сравнению с двигателем I . Но когда пульсация тока высока, мгновенный ток проходит через двигатель и нагревает его; тогда уравнение следует изменить, чтобы оно стало следующим:
Учитывая ШИМ с рабочим циклом 50%, где пульсации максимальны, а средняя мощность двигателя равна P, интегральная часть может быть переписана как:
Таким образом, уравнение. 16 можно переписать с учетом 90% эффективности ШИМ следующим образом:
16 можно переписать с учетом 90% эффективности ШИМ следующим образом:
ШИМ увеличивает срок службы двигателя
Есть несколько вещей, которые можно сделать для увеличения срока службы двигателя при использовании ШИМ:
1. Уменьшите пульсации тока двигателя. Пульсации тока можно уменьшить, увеличив частоту ШИМ. Если частота ШИМ значительно выше, чем постоянная времени двигателя (L/R), пульсации еще больше уменьшаются. Для двигателей без сердечника Portescap рекомендуется пульсация менее 10 % для увеличения срока службы двигателя.
Другой интуитивный подход к уменьшению пульсаций тока заключается в добавлении внешней индуктивности в цепь двигателя, которая действует как фильтр тока. Обычно это повышает эффективность. Однако индуктор усугубляет общую электроэрозию системы щетка-коллектор, поскольку электроэрозия прямо пропорциональна индуктивности цепи. Следовательно, если только эффективность и нагрев двигателя не являются проблемой, этот подход не рекомендуется.
2. Конструкция преобразователя постоянного тока. В конструкциях, подобных приведенной ниже, эффективность системы резко повышается, а срок службы щеток двигателя увеличивается по сравнению с решением, в котором в цепь добавляется внешняя индуктивность.
Чтобы оптимизировать схему, пульсации напряжения, заданные ур. 18, следует свести к минимуму. Значение менее 10 % достаточно для практической работы двигателя.
Из приведенного ниже уравнения следует, что на более высоких частотах значение катушки индуктивности и конденсатора будет уменьшаться, и, следовательно, общая упаковка привода ШИМ уменьшится.
Ультразвуковые колебания могут возникать в роторе при работе двигателя на более низких частотах. Поэтому рекомендуется управлять двигателем на частотах выше 20 кГц.
Для приложений с батарейным питанием, где используются миниатюрные двигатели, эффективность приложения определяет цикл заряда батарей. Привод PWM помогает, позволяя двигателю работать на разных скоростях. Однако необходима точная конструкция ШИМ, чтобы пульсации тока и напряжения были незначительными и срок службы двигателя не сокращался.
Однако необходима точная конструкция ШИМ, чтобы пульсации тока и напряжения были незначительными и срок службы двигателя не сокращался.
Sunil Kedia is m Менеджер по дизайну и разработке в Portescap.
Управление щеточными двигателями постоянного тока с помощью ШИМ
Введение
Многие приложения, использующие миниатюрные щеточные двигатели постоянного тока Portescap, требуют управления двигателями с более чем
одной точки нагрузки или через определенные циклы нагрузки. Для запуска двигателя в точках полезной нагрузки требуется переменная,
управляемый источник питания, что может быть достигнуто за счет источников питания с линейной регулировкой непрерывного действия или
посредством широтно-импульсной модуляции (ШИМ). Линейное регулирование, как правило, неэффективно и требует повышенных
жилплощадь. Более того, в приложениях с батарейным питанием становится непрактичным использование линейного регулирования при
различные точки нагрузки.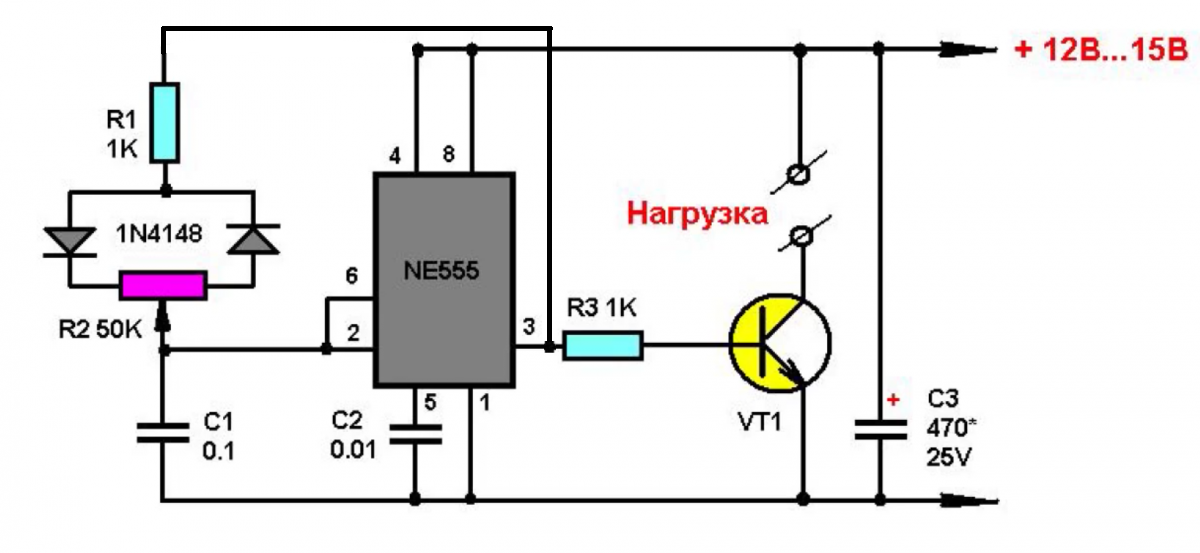 ШИМ-стабилизация напряжения, с другой стороны, эффективна и может эффективно использоваться с
ШИМ-стабилизация напряжения, с другой стороны, эффективна и может эффективно использоваться с
приложения с питанием от батареи или постоянного тока. Повышенная эффективность ШИМ-привода увеличивает срок службы батареи и
снижает нагрев электронных компонентов.
Одним из недостатков использования ШИМ с двигателем является появление потерь на вихревые токи в обмотках ротора из-за
непрерывное ШИМ-переключение, которого в общем случае нет в случае линейного источника питания. Однако,
при правильном проектировании ШИМ эффекты вихревых токов могут быть сведены к минимуму, что позволяет двигателям работать оптимально.
ведомый.
Коллекторные двигатели постоянного тока Portescap обладают очень низкой инерцией и малой индуктивностью. Это позволяет использовать двигатель в
приложение, в котором требуется динамичное поведение и быстрая реакция.
использование ШИМ позволяет контролировать ток в обмотках. Следовательно, вывод
крутящий момент, линейно пропорциональный среднему току обмотки, может
быть правильно управляемым; благодаря нашему дизайну без сердечника.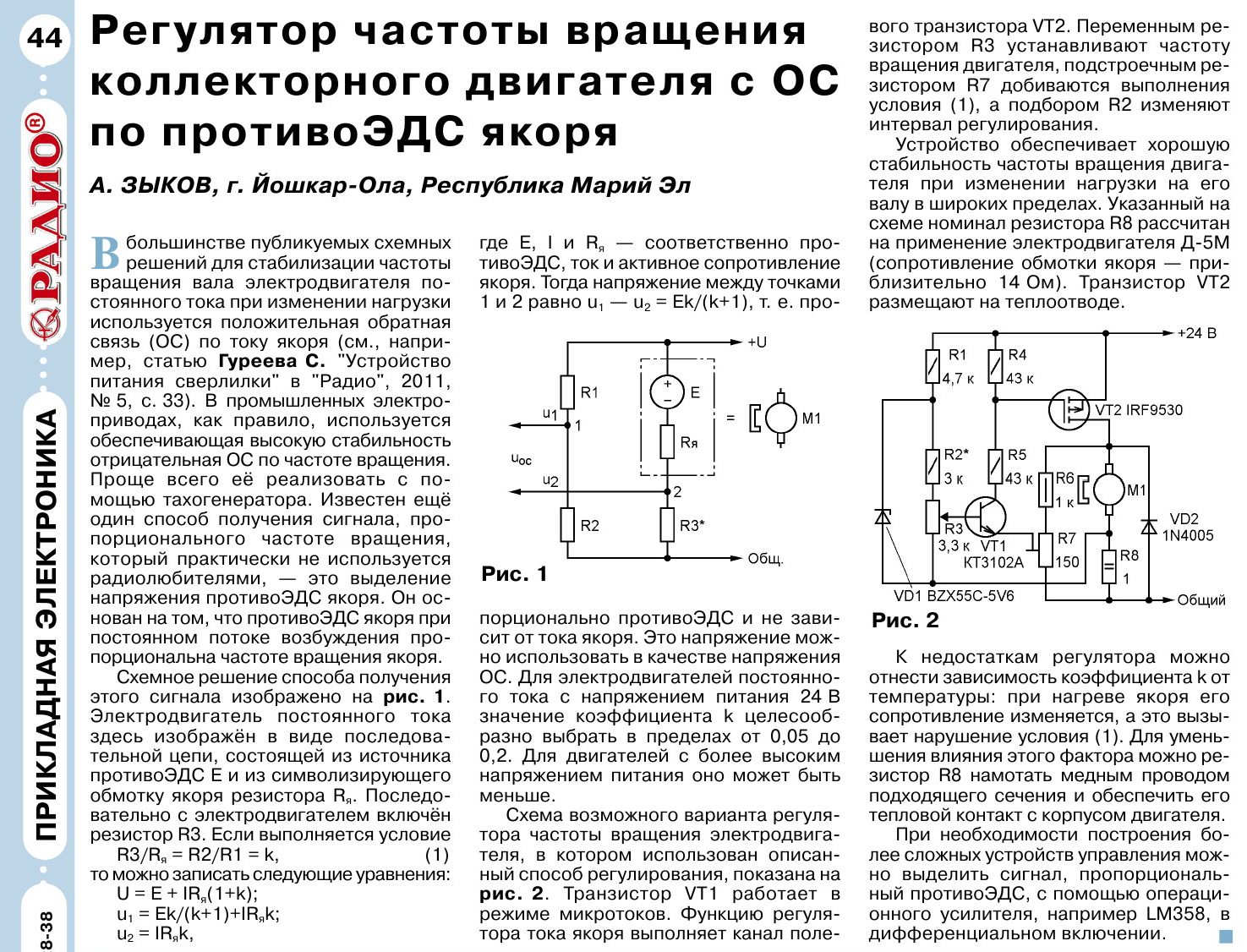
В отличие от чисто резистивной нагрузки, для двигателя постоянного тока сопротивление, индуктивность и обратная ЭДС на обмотках ротора являются решающими факторами для оптимизации частоты ШИМ и рабочего цикла.
Линейный и ШИМ-источник питания
ЛИНЕЙНЫЙ ИСТОЧНИК ПОСТОЯННОГО ТОКА
На рис. 1 показана эквивалентная схема двигателя, приводимого в действие линейным источником постоянного тока. Здесь ток является функцией
только сопротивление обмотки. Индуктивность не влияет на ток, так как при постоянном источнике импеданс
индуктора равен нулю.
Каталожные значения Portescap и результаты испытаний на долговечность получены при постоянном линейном источнике питания постоянного тока.
ИСТОЧНИК ШИМ
В дополнение к омическому сопротивлению, обмотка двигателя постоянного тока обеспечивает индуктивность цепи ШИМ. Более того,
обратная ЭДС, эквивалентная характеристикам двигателя (KE) и скорости, генерируется на клемме. Этот
усложняет конструкцию схемы ШИМ, поскольку необходимо учитывать не только рабочий цикл, но и частоту ШИМ.
точно регулируется для оптимальной работы двигателя.
Когда двигатель находится в состоянии покоя или вращается с очень низкой скоростью, противо-ЭДС можно пренебречь и упростить
показана эквивалентная схема двигателя (рис. 2).
Обгонный или демпферный диод, показанный на рис. 2, никогда не следует исключать при использовании переменного напряжения, такого как
как в случае ШИМ, управляющего двигателями. Наличие диода свободного хода позволяет рассеять заряд
без искрения в момент переключения.
Когда двигатель работает на умеренно высокой скорости, противо-ЭДС сравнима с приложенным напряжением, поэтому
компонент, представляющий обратную ЭДС, необходимо добавить в эквивалентную схему. Модифицированный эквивалент
схема показана на рис. 3.
Наличие противо-ЭДС вместе с цепью RL в коллекторном двигателе постоянного тока приводит к нелинейности ШИМ.
управления, и как частота ШИМ, так и рабочий цикл ШИМ становятся важными для оптимальной выходной мощности.
При использовании ШИМ для управления двигателем, где ЭМС (электромагнитная совместимость) имеет решающее значение, рекомендуется
для анализа эффектов излучения, поскольку излучаемая электромагнитная энергия обычно выше при ШИМ, когда
по сравнению с линейными источниками постоянного тока.
Вольт-амперные характеристики
Когда напряжение подается на цепь RL, катушка индуктивности противодействует току в цепи. Как результат,
ток экспоненциально возрастает до установившегося значения в зависимости от отношения L/R двигателя. Рис. 4 показывает
Схема нарастания тока через обмотку. Когда приложенное напряжение снимается с цепи,
ток медленно достигает нуля, затухая экспоненциально.
Постоянная L/R, известная как постоянная времени для цепи RL, определяет максимальную скорость изменения
приложенное напряжение в цепи. Стационарное состояние после любого изменения приложенного напряжения достигается через время
равно нескольким постоянным времени. На приведенной ниже кривой показан экспоненциальный рост тока в двигателе и
представляет собой идеальный сценарий. Пятикратная постоянная времени обычно считается требуемым количеством времени.
для достижения устойчивого состояния. Однако, как показано ниже, при пятикратной постоянной времени мы имеем около 99,33%
максимальный ток. Следовательно, выбор нескольких постоянных времени остается за разработчиком.
Следовательно, выбор нескольких постоянных времени остается за разработчиком.
Игнорируя для простоты наличие противо-ЭДС, нарастание тока в простой RL-цепи можно представить как
‘I0
’ — максимальный ток через цепь RL для данного напряжения. «τ» — постоянная времени цепи RL.
определяется как время, необходимое для того, чтобы ток достиг (1/e ≈ 63,21%) максимального тока. А «т» — это время.
После достижения устойчивого состояния, если источник питания отключен, ток через цепь RL падает
экспоненциально, как показано на рис. 5.
Рекомендации по проектированию ШИМ
При использовании привода ШИМ с щеточными двигателями постоянного тока внутренняя индуктивность ротора действует как фильтр тока
и является выгодным для схемы привода. Однако другие конструктивные параметры, такие как частота ШИМ и коэффициент заполнения
цикла, влияют на пульсацию тока и, следовательно, на срок службы щеточной коммутации.
ОПТИМАЛЬНАЯ ЧАСТОТА
При использовании ШИМ для управления двигателем ток через двигатель увеличивается и уменьшается с каждым периодом
ШИМ.![]() Если не учитывать противо-ЭДС двигателя, нарастание тока является функцией индуктивности двигателя и общей
Если не учитывать противо-ЭДС двигателя, нарастание тока является функцией индуктивности двигателя и общей
сопротивление. Для каждого цикла ШИМ, чтобы ток достиг своего установившегося значения, частота ШИМ
следует выбирать таким образом, чтобы обеспечить достаточное время для цепи RL, обычно более 5τ.
Когда частота ШИМ превышает пороговое значение, время включения и выключения ШИМ становится меньше
время, необходимое для срабатывания цепи RL и достижения установившегося состояния тока. Следовательно, текущий
колеблется между двумя нестационарными значениями, что приводит к
текущая пульсация. На рис. 6 показаны условия, когда частота ШИМ
достаточно для достижения стационарного состояния. Рис. 7 показывает условие
когда частота ШИМ выше, чем время, необходимое для устойчивого
состояние и ток через двигатель колеблется. Из дизайна
В перспективе текущие пульсации должны быть уменьшены за счет оптимизации частоты возбуждения, чтобы почти линейная
поведение крутящего момента может быть достигнуто.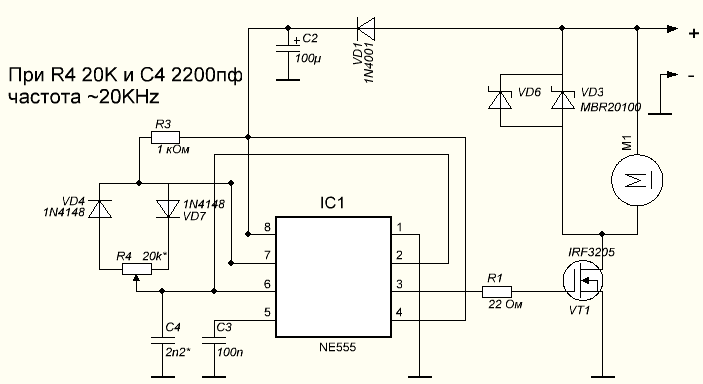
Также рекомендуется поддерживать частоту ШИМ выше слышимого человеком диапазона (20 Гц – 20 кГц) в качестве
пульсации тока в этом диапазоне частот могут вызвать шум во время работы двигателя.
ПУЛЬСАЦИИ ТОКА
Для двигателей Portescap без сердечника мы рекомендуем поддерживать пульсации тока как можно ниже. Как правило, пульсация
<10% считается низким значением. Более высокая пульсация повлияет на производительность:
I. Выходной крутящий момент двигателя пропорционален току, где омический (резистивный) нагрев в обмотке
пропорциональна квадрату силы тока. Следовательно, при пиковых токах нагрев пакета обмотки
будут доминировать и снижать двигательную активность и жизнь.
II. В коллекторных двигателях постоянного тока Portescap не используются пластины из железа, поэтому потери на вихревые токи и гистерезис
в магнитной цепи прямо пропорциональны пульсациям тока и уменьшили бы общий
производительность мотора.
III. Для коммутации драгоценных металлов повышенная электроэрозия повлияет на срок службы двигателя, поскольку
электроэрозия пропорциональна коэффициенту L.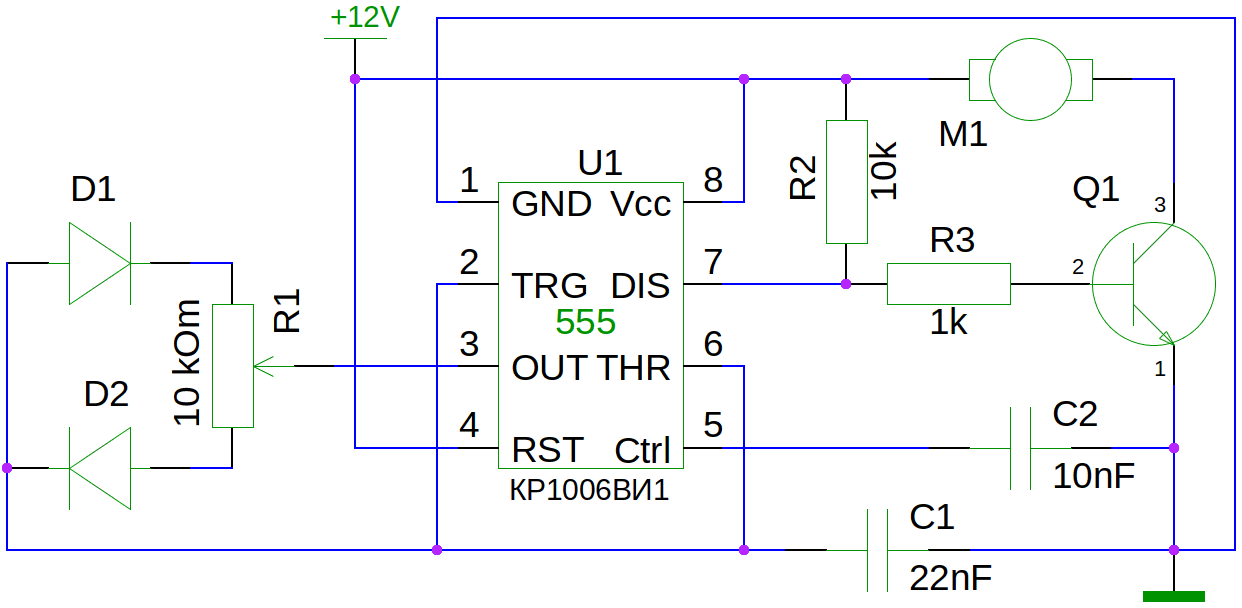 Ieff
Ieff
2
. Где L — индуктивность, а Ieff — эффективная
ток через обмотку.
IV. При коммутации угольных щеток повышенная пульсация тока увеличивает накопление патины. (патина или
Пленка представляет собой слой оксида меди, образующийся на поверхности коллектора угольной щетки, который помогает
в улучшении коммутации и уменьшении трения.) Следовательно, на более низких скоростях контакт щетки
ухудшится. На средних и высоких скоростях патин не влияет на работу двигателя.
существенно.
Индуктивное напряжение на клемме может быть указано как
Где L — индуктивность, U L — напряжение, генерируемое на катушке индуктивности, а T — бесконечно малое время.
в течение которого ток изменился на ∆I.
При ШИМ-режиме двигателя напряжение на его выводах противодействует генерируемой противо-ЭДС
через клемму двигателя. Следовательно, ур. (3) можно переписать как для нарастания, так и для спада тока в ШИМ.
операции как:
Где нижний индекс ON обозначает время «включения», а OFF обозначает время «выключения» ШИМ-импульса, так что
общее время TP указано как
Где D — рабочий цикл ШИМ-сигнала.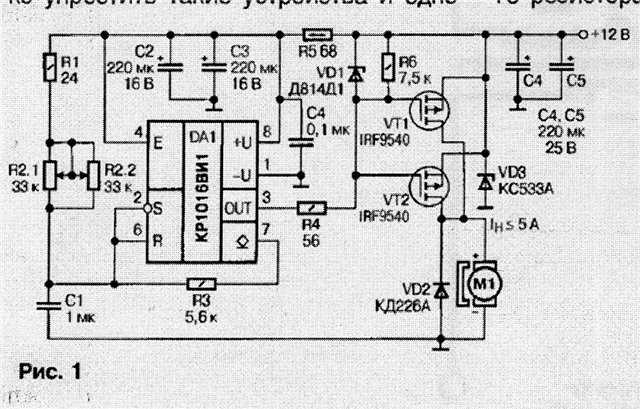
Следовательно, ур. (8) можно переписать как
Ур. (11) можно использовать для извлечения пульсаций тока в двигателе из-за ШИМ-сигнала рабочего цикла «D» и
частота ‘1/T P ’.
Представляет особый интерес отметить из ур. (11) пульсации тока максимальны при коэффициенте заполнения 50 %.
Следовательно, разработчикам ШИМ предлагается запускать двигатель вне зоны 50% рабочего цикла.
Кроме того, из приведенного выше уравнения пульсации тока зависят только от индуктивности двигателя, а не от
электрическая постоянная времени двигателя.
В идеале, для двигателей Portescap без сердечника разница (U ON – U OFF ), иногда задаваемая как ∆U, должна сохраняться как
насколько это возможно, в зависимости от максимального входного напряжения двигателя и рабочей скорости.
Индуктивность двигателя на его клемме зависит от ШИМ.
частота. В каталоге продукции Portescap индуктивность двигателя указана при 1
кГц. Например, на частоте 100 кГц индуктивность может уменьшиться до 20%.
от каталожной стоимости.
По сравнению с двигателем с железным сердечником индуктивность двигателей Portescap
ниже в два раза. Также показатель качества хуже, так как в роторе отсутствуют железные пластины.
обмотки. Следовательно, ШИМ-привод с двигателем Portescap будет иметь относительно более высокие потери и будет предлагать меньше энергии.
Электронная стабильность.
АСПЕКТЫ СЛУЖБЫ ДВИГАТЕЛЯ
В щеточных двигателях постоянного тока преобладающим видом неисправности является щеточная коммутация. В течение жизни
двигатель, щетки из углеграфита или драгоценного металла подпружинены и механически соединены с
сегменты коллектора для зарядки катушек. Следовательно, износ щеток является функцией механического трения, когда
скольжение щеток по сегментам коллектора и электроэрозия, вызванная электрическими разрядами во время
коммутация.
При использовании приводов ШИМ для работы двигателя с различными скоростями и нагрузками оценка срока службы двигателя
становится сложной комбинацией различных факторов, влияющих на его износостойкость. Этими факторами могут быть:
Этими факторами могут быть:
я. Более высокая плотность тока в коммутации из-за пониженного КПД, высокого механического трения,
недостаточная смазка или рециркуляция тока.
ii. Высокая электроэрозия во время всплесков тока при использовании источников ШИМ.
iii. Повышенная рабочая температура двигателя из-за условий окружающей среды или высокой удельной мощности
двигатель, что снижает качество смазки.
В зависимости от области применения и типа источника питания двигателя ожидаемый срок службы может зависеть от
один или несколько факторов, описанных выше.
Для конструкций двигателей, где точка нагрузки требует, чтобы двигатель работал с умеренными крутящим моментом и скоростью, без осевых и радиальных
нагрузках, действующих на вал, и в умеренном диапазоне температур (обычно <60ºC) преобладает износ.
методом электроэрозии. Тогда срок службы двигателя обратно пропорционален индуктивности и квадрату тока:
В приведенном выше уравнении рассматривается линейный источник питания или источник ШИМ с незначительной пульсацией тока по сравнению с
к среднему току через двигатель. В практических сценариях пульсация может способствовать снижению
В практических сценариях пульсация может способствовать снижению
жизнь значительно.
Вариант 1: пульсации тока менее 10 %
С коллекторными двигателями постоянного тока Portescap, чтобы уменьшить пульсации тока до уровня менее 10 %, диапазон частот
может достигать 40–120 кГц.
llosses — это потери в диоде, потери из-за вихревых токов и гистерезиса на трубке двигателя. Это бы
снизить общий КПД двигателя. Тем не менее, хорошая конструкция обеспечивает КПД 85-90%.
ШИМ.
Из ур. (12) и (13), и рассматривая потери как 10 % от Iдвигателя, как 10 % от Iдвигателя,
Случай 2: Пульсации тока значительны
Уравнение (14) верно, когда Iпотери малы по сравнению с Iдвигателем . Когда пульсация тока высока, мгновенный ток
выброс через двигатель нагревает двигатель, и уравнение должно быть изменено как
Учитывая ШИМ с рабочим циклом 50 %, когда пульсация максимальна, а средняя мощность двигателя равна «P»,
неотъемлемая часть может быть переписана как
УВЕЛИЧЕНИЕ СЛУЖБЫ ДВИГАТЕЛЯ С ШИМ
Есть несколько вещей, которые можно сделать, чтобы увеличить срок службы двигателя при использовании ШИМ:
1.
 СНИЖЕНИЕ ПУЛЬСАЦИИ ТОКА ДВИГАТЕЛЯ
СНИЖЕНИЕ ПУЛЬСАЦИИ ТОКА ДВИГАТЕЛЯ
Пульсации тока можно уменьшить, увеличив частоту ШИМ. Если частота ШИМ значительно
выше, чем постоянная времени L/R двигателя, пульсации еще больше уменьшаются. Для конструкции Portescap без сердечника
с точки зрения срока службы двигателя рекомендуется пульсация <10%.
Другой общий интуитивный подход к уменьшению пульсаций тока заключается в добавлении внешней индуктивности к двигателю.
цепь, которая действует как фильтр тока. Обычно это повышает эффективность. Однако наличие
индуктор ухудшает общую электроэрозию системы щетка-коллектор, так как электроэрозия непосредственно
пропорциональна индуктивности цепи. Следовательно, если только эффективность и нагрев двигателя не являются единственными проблемами,
мы не рекомендуем это решение.
2. КОНСТРУКЦИЯ ПРЕОБРАЗОВАТЕЛЯ ПОСТОЯННОГО ТОКА
В конструкциях, подобных показанной на рис. 8, эффективность системы резко повышается, а щетка двигателя
срок службы лучше по сравнению с решением, в котором в цепь добавляется внешняя индуктивность.
Чтобы оптимизировать схему, пульсации напряжения, заданные ур. 18, следует свести к минимуму. Значение менее 10%
достаточно хорошо с точки зрения практической эксплуатации двигателя.
Из приведенного выше уравнения следует, что при более высоких частотах значение катушки индуктивности и конденсатора будет уменьшаться и
следовательно, общая упаковка ШИМ-привода уменьшится. Кроме того, ультразвуковые колебания могут быть вызваны
в роторе при работе двигателя на более низких частотах. Поэтому рекомендуется запускать двигатель на
частоты выше 20 кГц.
Заключение
Для приложений с батарейным питанием, где используются миниатюрные двигатели, эффективность приложения определяет
цикл заряда аккумуляторов. Преимущество ШИМ-привода заключается в том, что он позволяет двигателю работать на разных скоростях.
Однако требуется точная конструкция ШИМ, чтобы гарантировать, что пульсации тока и напряжения будут незначительными и
срок службы двигателя не влияет.