Содержание
Схема реверса для электродвигателей постоянного тока
Автор admin На чтение 11 мин Просмотров 1 Опубликовано Обновлено
Содержание
- Реверс двигателя постоянного тока
- Как осуществить реверс электродвигателя постоянного и переменного тока
- Реверсивное включение двигателей постоянного тока
- Изменение направления вращения ротора асинхронного двигателя
- Схема подключения коллекторного двигателя с реверсом
- Схема реверса электродвигателя на ардуино
Реверс двигателя постоянного тока
Схема управления двигателем постоянного тока, реверсирование и реверсивное управление мотором
Реверсирование и замедление двигателей постоянного тока электронный механизм arduino и электронная схема управления.
Основная схема пластического запуска и остановки без содействия переключателей в обе стороны. Главной опорой данной схемы стоит простой резистор, который удерживает вращение прибора в среднем состоянии, а при крайних плавно начинает вращать электродвигатель в обоих направлениях. Такое применение подходит для 12в электромотора, его питания и схемы в целом, также управления при неизменном потоке, которое подробно описано далее.
Главной опорой данной схемы стоит простой резистор, который удерживает вращение прибора в среднем состоянии, а при крайних плавно начинает вращать электродвигатель в обоих направлениях. Такое применение подходит для 12в электромотора, его питания и схемы в целом, также управления при неизменном потоке, которое подробно описано далее.
Включение неизменчивого тока прямым запуском, возможно только с механизмами малой мощности (допустимый пик тока 4-6 кратно номинального). Пуск постоянного течения в носителях с более сильным мотором совершается с использованием пускового реостата, он же и регулирует допустимые значения для поддержки механической прочности, как это было описано в схеме.
Нормальный ток необходим при запуске движок, должен развивать довольно большой разгон. Для этого акселерометр последовательно уменьшает сопротивление при перемене рычага с одного неподвижного контакта на другой. Снижение сопротивления также возможно замыкания ненадолго секций, с помощью контакторов. В противовес пускового, регулировочный реостат рассчитан на долговременное прохождение тока. Но, происходит большая потеря энергии во время работы инструмента, результатом чего кпд в моторе убавляется.
В противовес пускового, регулировочный реостат рассчитан на долговременное прохождение тока. Но, происходит большая потеря энергии во время работы инструмента, результатом чего кпд в моторе убавляется.
При ручном запуске или автомате, ток меняется от максимально допустимого, 1,8-2,5 – кратному номинальному в начале, и при противодействии аппаратуры до минимального, 1,1 – 1,5 кратному номинальному в конце. Также такие значения будут при переключении на другое положение пускового реостата.
Реверсирование
Реверсирование – смена вращений двигателя, в котором нужно переключиться на обмотку или якорь, но для верпа сила будет течь в другом направлении. Так званые регуляторы, которые используются для моторчиков с неизменным течением. Реверс используется переменой фаз в сети переменного тока. Возможно в автоматическом действии с заменой сигнала, и также после определения нужного действия на логический вход. В обоих случаях направление искры в якоре будет противоположным.
Основные тактики для возврата механизма:
- Контакторный, используется очень редко.
- Статический способ. В основном это изменение полярности или направления тока.
- Реверсирование с магнитным пускателем.
- Реверс электродвижка с асинхронными прямыми частотными преобразователями. Используется вместе с векторным управлением в замкнутой системе и датчиком обратной связи. Аналогично и регулирование аккумулятора с непрерывным током.
Реверс с постоянными магнитами производится с помощью изменения полярности питания пусковых устройств, тогда ротор начинает вращаться в другую сторону. В этом случае можно регулировать скорость вращения. В основном управление происходит по 2-х проводной линии (тиристорами). Также изменения реверсивности на большой мощности следует на якоре. Неправильное возбуждение обмотки производит к неисправностям, из-за повышенного напряжения возможна изоляция обмоток и выход аппарата из строя. Поэтому нужно правильно собрать оборудования по технической характеристике.
Осуществляется реверс моторов последовательного возбуждения возможно с помощью переходов или обвиванием возбуждения якоря, потому что энергические запасы в якорях и обвивках не очень большие и время непрерывного переключения небольшие.
Возвращение с параллельным возбуждением в якоре сначала нужно отключить от питания, поэтому моторчик автоматически тормозится. Когда он заканчивает тормозить, якорь переключается, если он не переключился во время торможения, тогда запуск начинается при вращении в обратную сторону. В той же градации придерживается и реверсирование для последовательного возбуждения:
- Выключение
- Замедление
- Переключение
- Пуск в обратную сторону
Реверс основного инструмента с разнообразным включением нужно перевести на якорек или прямую обмотку разом с параллельной обмоткой.
Пуск и торможение
Торможение с постоянным током связано с, конечно же, мощностью. Поскольку прямое подключение возможно на малых мощностях сердца аппарата, во всех следующих обстоятельствах можно использовать только пусковой реостат. Он определяет позволенные значения и определяет допустимый ток.
Он определяет позволенные значения и определяет допустимый ток.
Реостат представляет собою провод, рассортирован на секции с большим сопротивлением. В переходах зафиксированы медные кнопочки или контакты, к ним можно присоединять провод. При запуске сопротивление оборудования должно уменьшаться по порядку. Чтобы уменьшить время работы мотора, нужно замедление, так как при его отсутствии может быть слишком большое количество. Также замедление нужно для фиксирования приводимых приборов в нужном порядке положения.
Выключение возможно на двух типов: электрическое и механическое
Механистическая остановка в основном делается с помощью накладки колодок на тормозной шкив. Нехватка самопроизвольного тормоза: Момент остановки невозможно предугадать из-за случайностей. Если масло, или жидкость попадет на шкив тормоза данное замедление возможно, когда период времени и тормозного пути не ограничены.
В аварийных ситуациях после прежнего электрического торможения на небольшом темпе движения можно сделать полную остановку инструмента. Зафиксировать положение прибора в определенном месте.
Зафиксировать положение прибора в определенном месте.
Электрическая остановка создает точный момент торможения. Так как фиксация невозможна в нужном месте, механическим путем оно дополняется и входит в работу после окончания работы электрического. Такой тормоз возможен, когда ток идет в траектории согласно ЭДС движка.
Доступные три вида торможения:
- Стоп мотора беспрестанного потока с возвращением энергии. Кинетическая энергия должна превратиться в электрическую, часть с которой попадает обратно в сеть. Стоп выполнено, когда напряжение уменьшается при любом загруженности машинного оборудования.
- При противоположном включении. С помощью вращающегося аппарата переключается на противоположное направление вращения. В нем напряжение складывается, следовательно, нужно включить резистор для ограничения силы с сопротивлением. Такое замедление берет большую затрату энергии.
- Динамическое. Делается при включении на зажимах в сердце резистора мотора. Кинетическая запасная энергия превращается в электрическую энергию и рассеивается.
 Такое замедление очень распространенный.
Такое замедление очень распространенный.
 Такое замедление очень распространенный.
Такое замедление очень распространенный.Пуск, возврат и замедление двигателей постоянного тока выполняется с соблюдением технологических требований и правилам безопасности.
Arduino возврат электромотора для 12 вольтовых инструментов
При собирании моделей часто используются малые щеточные электромоторы с постоянным током. Для их управления используется микроконтроллер arduino, который запрограммирован к ручному управлению.
Поэтому, если вращения в нем предполагается в одну сторону с небольшой мощностью в двигателе, а также напряжения от 3,3 до 5ти Вт, то схему можно упростить.
В такой модели дистанционного управления нужно использовать возвращение моторов с мощностью более 5 Вт. В данном микроконтроллере используют ключи, сделанные по мостовой схеме. Ниже на картинке можно увидеть универсальную схему подключения двигателя с реверсом на ардуино. Таким способом могут использоваться полевые транзисторы или драйвер (специально изготовление устройство), оно помогает подключить мощные моторчики. Собирать данную схему должен обученный специалист, при самостоятельном установлении нужно соблюдать меры безопасности.
Собирать данную схему должен обученный специалист, при самостоятельном установлении нужно соблюдать меры безопасности.
Заключение: Реверсирование и выключение приборов постоянного тока является очень гибким приводным приборам, которое используется там, где не нужны большие моменты при старте. Механизм имеет надежные цепи регулировки скорости вращения и простой при запуске в ход орудия.
Источник
Как осуществить реверс электродвигателя постоянного и переменного тока
Реверсивное включение двигателей постоянного тока
Наиболее просто осуществить реверс двигателя постоянного тока, у которого статор с постоянными магнитами. Достаточно изменить полярность питания, чтобы ротор начал вращаться в обратную сторону.
Сложнее осуществить реверсирование мотора с электромагнитным возбуждением (последовательным, параллельным). Если просто поменять полярность питающего напряжения, то направление вращения ротора не изменится. Чтобы изменить направление вращения, достаточно поменять полярность только в обмотке возбуждения или только на щетках ротора.
Чтобы изменить направление вращения, достаточно поменять полярность только в обмотке возбуждения или только на щетках ротора.
Для осуществления реверса двигателей большой мощности полярность следует менять на якоре. Разрыв обмотки возбуждения на работающем моторе может привести к неисправности, т.к. возникающая ЭДС имеет повышенное напряжение, которое способно повредить изоляцию обмоток. Что приведет к выходу электродвигателя из строя.
Для осуществления обратного направления вращения ротора применяют мостовые схемы на реле, контакторах или транзисторах. В последнем случае можно и регулировать скорость вращения.
На рисунке представлена схема на транзисторах. В качестве иллюстрации работы транзисторы заменены контактами переключателя. Аналогично выполняются мостовые схемы не на биполярных, а на полевых транзисторах.
КПД такой схемы значительно выше, чем на транзисторах. Управление осуществляется микроконтроллером или простыми логическими схемами, предотвращающими одновременную подачу сигналов.
Изменение направления вращения ротора асинхронного двигателя
Наибольшее распространение в промышленности получили асинхронные двигатели, запитанные от трехфазного напряжения 380 вольт. Для того чтобы осуществить реверс, достаточно поменять две любые фазы.
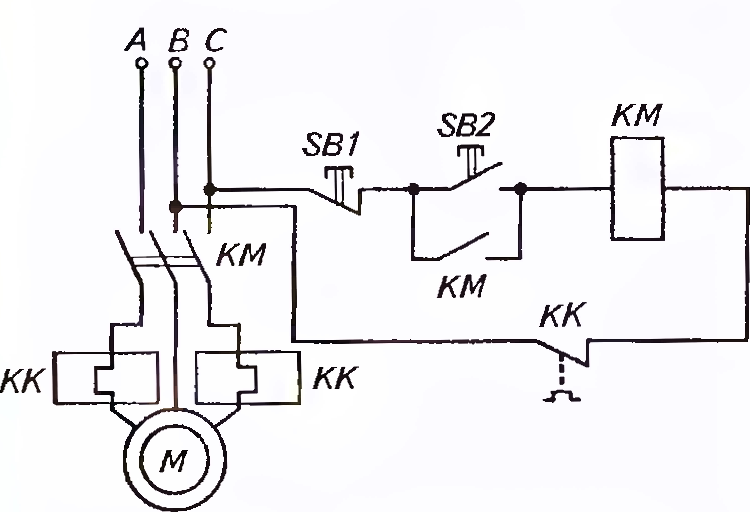
Получила распространение схема подключения, выполненная на двух магнитных пускателях. Собственно для двигателей постоянного тока она аналогична, но используются двухполюсные контакторы или пускатели. Эту схему так и называют «схема реверсивного пускателя» или «реверсивная схема пуска асинхронного трёхфазного электродвигателя».
При включении пускателя КМ1 кнопкой «Пуск 1», происходит прямая подача напряжения на обмотки и блокируется кнопка «Пуск 2» от случайного включения, посредством размыкания нормально-замкнутых контактов КМ-1. Двигатель вращается в одну сторону.
После отключения пускателя КМ1 кнопкой «Стоп» или полным снятием напряжения, можно включить КМ2 кнопкой «Пуск 2». В результате через контакты линия L2 подается напрямую, а L1 и L3 меняются местами.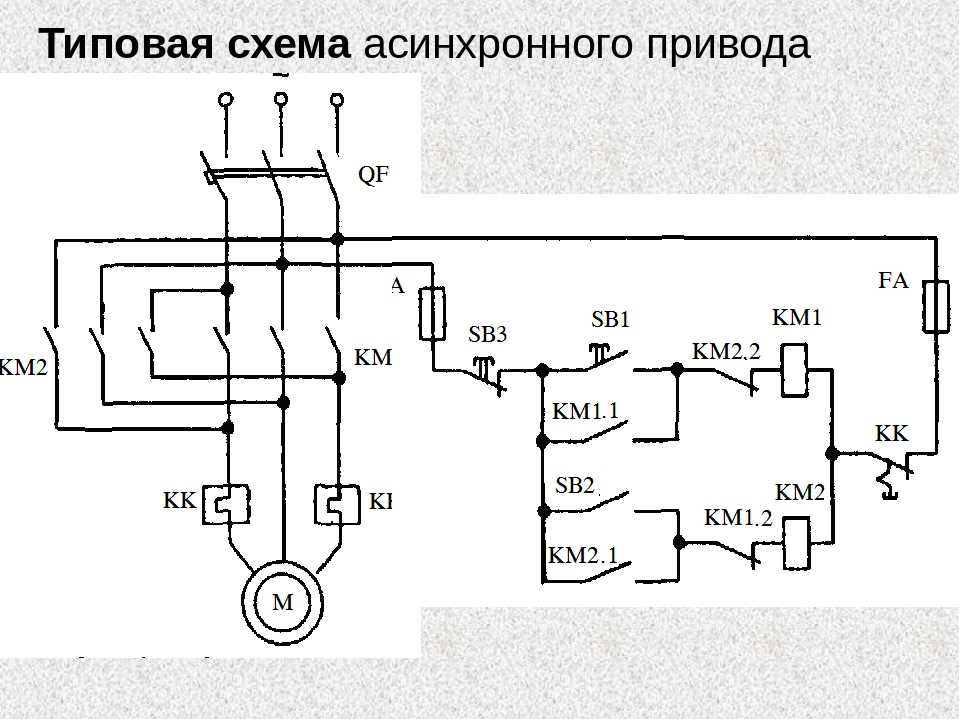 Кнопка «Пуск 1» заблокирована, так как нормально-замкнутые контакты пускателя КМ2 приводятся в движение и размыкаются. Двигатель начинает вращаться в другую сторону.
Кнопка «Пуск 1» заблокирована, так как нормально-замкнутые контакты пускателя КМ2 приводятся в движение и размыкаются. Двигатель начинает вращаться в другую сторону.
Схема применяется повсеместно и по сей день для подключения трехфазного двигателя в трехфазной сети. Простота схемного решения и доступность комплектующих — её весомые преимущества.
Наибольшее распространение находят электронные системы управления. Коммутационные схемы, которых собранные на тиристорах без пускателей. Хотя пускатели могут быть и установлены для дистанционного включения или выключения в этой цепи.
Они сложнее, но и надежнее устройств на контакторах. Для управления используется системы импульсно-фазного управления (СИФУ), системы частотного управления. Это многофункциональные устройства, с их помощью можно не только осуществлять реверс асинхронного электродвигателя, но и регулировать частоту вращения.
В домашних условиях возникает необходимость подключения двигателя 380В на 220 с реверсом. Для этого необходимо произвести переключение обмоток звезда треугольник. Подробнее мы рассматривали различия этих схем в статье размещенной на сайте ранее: https://samelectrik.ru/chto-takoe-zvezda-i-treugolnik-v-elektrodvigatele.html.
Для этого необходимо произвести переключение обмоток звезда треугольник. Подробнее мы рассматривали различия этих схем в статье размещенной на сайте ранее: https://samelectrik.ru/chto-takoe-zvezda-i-treugolnik-v-elektrodvigatele.html.
Однако, если предполагается подключение трехфазного электродвигателя к однофазной сети, то для этого применяется конденсатор, который подключается по нижеприведенной схеме.
При этом чтобы осуществить реверс, достаточно переключить провод сети с В на клемму А, а конденсатор отсоединить от А и подсоединить к клемме В. Удобно это сделать с помощью 6-контактного тумблера. Это типовое включение асинхронного электродвигателя к сети 220В с конденсатором.
Схема подключения коллекторного двигателя с реверсом
Чтобы осуществить реверс коллекторного двигателя, необходимо знать:
- Не на каждом коллекторном моторе можно осуществить реверс. Если на корпусе указана стрелка вращения, то его нельзя применять в реверсивных устройствах.
- Все двигатели, имеющие высокие обороты предназначены для вращения в одну сторону. Например, у электродвигателя, устанавливаемого в болгарках.
- У двигателя, который имеет небольшие обороты, вращение может осуществляться в разные стороны. Такие моторы смонтированы в электроинструментах, например, электродрелях, шуруповертах, стиральных машинах и т.п.
На рисунке представлена схема универсального коллекторного двигателя, который может работать как от постоянного, так и переменного тока.
Чтобы изменилось вращение ротора, достаточно поменять полярность напряжения на обмотке ротора или статора, как и в двигателях постоянного тока, от которых универсальные машины практически не отличаются.
Если просто изменить полярность подводящего напряжения на коллекторном двигателе, направление вращения ротора не изменится. Это необходимо учитывать при подключении электродвигателя к сети.
Также следует знать, что в моторах большой мощности коммутируют обмотку якоря. При переключении обмоток статора возникает напряжение самоиндукции, которое достигает величин, способных вывести двигатель из строя.
При переключении обмоток статора возникает напряжение самоиндукции, которое достигает величин, способных вывести двигатель из строя.
Конструктора-любители в своих поделках применяют различные типы двигателей. Зачастую они используют щеточный электродвигатель от стиральной машинки автомат. Это удобные моторчики, которые можно подключать непосредственно к сети 220 вольт. Они не требуют дополнительных конденсаторов, а регулировку оборотов можно легко производить с помощью стандартного диммера. На клеммную колодку выводятся шесть или семь выводов.
Зависит от типа двигателя:
- Два идут на щетки коллектора.
- От таходатчика на колодку приходит пара проводов.
- Обмотки возбуждения могут иметь два или три провода. Третий служит для изменения скорости вращения.
Чтобы выполнить реверс двигателя от стиральной машины, следует поменять местами выводы обмотки возбуждения. Если имеется третий вывод, то его не используют.
Схема реверса электродвигателя на ардуино
В конструировании моделей или робототехнике часто применяются небольшие щеточные электродвигатели постоянного тока, для управления которыми используется программируемый микроконтроллер ардуино.
Если вращение двигателя предполагается только в одну сторону, и мощность электродвигателя небольшая, а напряжение питания от 3,3 до 5 вольт, то схему можно упростить и запитать непосредственно от ардуино, но так делают редко.
В моделях с дистанционным управлением, где необходимо использовать реверс моторов с напряжением более 5В, применяют ключи, собранные по мостовой схеме. В этом случае схема подключения двигателя с реверсом на ардуино будет выглядеть подобно тому что изображено ниже. Такое включение применяется чаще всего.
В мостовой схеме могут применяться полевые транзисторы или специальное согласующее устройство — драйвер, с помощью которого подключаются мощные моторчики.
В заключение отметим, что собирать схему реверса электродвигателя должен подготовленный специалист. Однако, при самостоятельном подключении необходимо соблюдать условия техники безопасности, выбрать подходящую схему соединения и подобрать необходимые комплектующие, строго следуя инструкции по монтажу. В этом случае у конструктора не возникнет трудностей в подключении и эксплуатации электродвигателя.
В этом случае у конструктора не возникнет трудностей в подключении и эксплуатации электродвигателя.
Теперь вы знаете, что такое реверс электродвигателя и какие схемы подключения для этого используют. Надеемся, предоставленная информация была для вас полезной и интересной!
Источник
Как осуществить реверс электродвигателя постоянного и переменного тока
Реверс двигателя — это изменение вращения ротора на противоположное. Изменить направление вращения можно у электродвигателя постоянного тока, асинхронного и коллекторного двигателя переменного тока. Сложно представить себе устройство, в котором не применяется реверсивное вращение электродвигателя. Без изменения вращения невозможно представить работу тельфера, кран-балки, лебедок, грузоподъемных механизмов, лифтов, задвижек и т.п. Исключение составляют такие устройства, как заточные станки, вытяжки и т.д. В этой статье мы расскажем читателям сайта Сам Электрик, как осуществить реверс электродвигателей разных типов.
- Реверсивное включение двигателей постоянного тока
- Изменение направления вращения ротора асинхронного двигателя
- Схема подключения коллекторного двигателя с реверсом
- Схема реверса электродвигателя на ардуино
Реверсивное включение двигателей постоянного тока
Наиболее просто осуществить реверс двигателя постоянного тока, у которого статор с постоянными магнитами. Достаточно изменить полярность питания, чтобы ротор начал вращаться в обратную сторону.
Сложнее осуществить реверсирование мотора с электромагнитным возбуждением (последовательным, параллельным). Если просто поменять полярность питающего напряжения, то направление вращения ротора не изменится. Чтобы изменить направление вращения, достаточно поменять полярность только в обмотке возбуждения или только на щетках ротора.
Для осуществления реверса двигателей большой мощности полярность следует менять на якоре. Разрыв обмотки возбуждения на работающем моторе может привести к неисправности, т. к. возникающая ЭДС имеет повышенное напряжение, которое способно повредить изоляцию обмоток. Что приведет к выходу электродвигателя из строя.
к. возникающая ЭДС имеет повышенное напряжение, которое способно повредить изоляцию обмоток. Что приведет к выходу электродвигателя из строя.
Для осуществления обратного направления вращения ротора применяют мостовые схемы на реле, контакторах или транзисторах. В последнем случае можно и регулировать скорость вращения.
На рисунке представлена схема на транзисторах. В качестве иллюстрации работы транзисторы заменены контактами переключателя. Аналогично выполняются мостовые схемы не на биполярных, а на полевых транзисторах.
КПД такой схемы значительно выше, чем на транзисторах. Управление осуществляется микроконтроллером или простыми логическими схемами, предотвращающими одновременную подачу сигналов.
Изменение направления вращения ротора асинхронного двигателя
Наибольшее распространение в промышленности получили асинхронные двигатели, запитанные от трехфазного напряжения 380 вольт. Для того чтобы осуществить реверс, достаточно поменять две любые фазы.
Получила распространение схема подключения, выполненная на двух магнитных пускателях. Собственно для двигателей постоянного тока она аналогична, но используются двухполюсные контакторы или пускатели. Эту схему так и называют «схема реверсивного пускателя» или «реверсивная схема пуска асинхронного трёхфазного электродвигателя».
При включении пускателя КМ1 кнопкой «Пуск 1», происходит прямая подача напряжения на обмотки и блокируется кнопка «Пуск 2» от случайного включения, посредством размыкания нормально-замкнутых контактов КМ-1. Двигатель вращается в одну сторону.
После отключения пускателя КМ1 кнопкой «Стоп» или полным снятием напряжения, можно включить КМ2 кнопкой «Пуск 2». В результате через контакты линия L2 подается напрямую, а L1 и L3 меняются местами. Кнопка «Пуск 1» заблокирована, так как нормально-замкнутые контакты пускателя КМ2 приводятся в движение и размыкаются. Двигатель начинает вращаться в другую сторону.
Схема применяется повсеместно и по сей день для подключения трехфазного двигателя в трехфазной сети.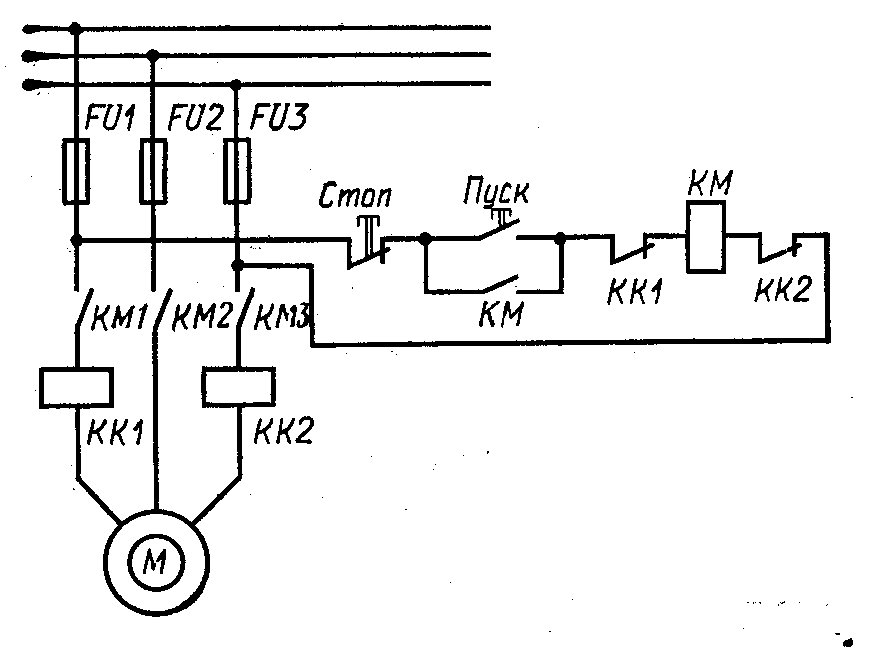 Простота схемного решения и доступность комплектующих — её весомые преимущества.
Простота схемного решения и доступность комплектующих — её весомые преимущества.
Наибольшее распространение находят электронные системы управления. Коммутационные схемы, которых собранные на тиристорах без пускателей. Хотя пускатели могут быть и установлены для дистанционного включения или выключения в этой цепи.
Они сложнее, но и надежнее устройств на контакторах. Для управления используется системы импульсно-фазного управления (СИФУ), системы частотного управления. Это многофункциональные устройства, с их помощью можно не только осуществлять реверс асинхронного электродвигателя, но и регулировать частоту вращения.
В домашних условиях возникает необходимость подключения двигателя 380В на 220 с реверсом. Для этого необходимо произвести переключение обмоток звезда треугольник. Подробнее мы рассматривали различия этих схем в статье размещенной на сайте ранее: https://samelectrik.ru/chto-takoe-zvezda-i-treugolnik-v-elektrodvigatele.html.
Однако, если предполагается подключение трехфазного электродвигателя к однофазной сети, то для этого применяется конденсатор, который подключается по нижеприведенной схеме.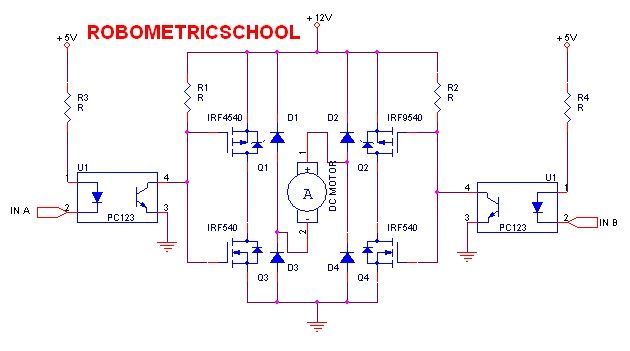
При этом чтобы осуществить реверс, достаточно переключить провод сети с В на клемму А, а конденсатор отсоединить от А и подсоединить к клемме В. Удобно это сделать с помощью 6-контактного тумблера. Это типовое включение асинхронного электродвигателя к сети 220В с конденсатором.
Схема подключения коллекторного двигателя с реверсом
Чтобы осуществить реверс коллекторного двигателя, необходимо знать:
- Не на каждом коллекторном моторе можно осуществить реверс. Если на корпусе указана стрелка вращения, то его нельзя применять в реверсивных устройствах.
- Все двигатели, имеющие высокие обороты предназначены для вращения в одну сторону. Например, у электродвигателя, устанавливаемого в болгарках.
- У двигателя, который имеет небольшие обороты, вращение может осуществляться в разные стороны. Такие моторы смонтированы в электроинструментах, например, электродрелях, шуруповертах, стиральных машинах и т.п.
На рисунке представлена схема универсального коллекторного двигателя, который может работать как от постоянного, так и переменного тока.
Чтобы изменилось вращение ротора, достаточно поменять полярность напряжения на обмотке ротора или статора, как и в двигателях постоянного тока, от которых универсальные машины практически не отличаются.
Если просто изменить полярность подводящего напряжения на коллекторном двигателе, направление вращения ротора не изменится. Это необходимо учитывать при подключении электродвигателя к сети.
Также следует знать, что в моторах большой мощности коммутируют обмотку якоря. При переключении обмоток статора возникает напряжение самоиндукции, которое достигает величин, способных вывести двигатель из строя.
Конструктора-любители в своих поделках применяют различные типы двигателей. Зачастую они используют щеточный электродвигатель от стиральной машинки автомат. Это удобные моторчики, которые можно подключать непосредственно к сети 220 вольт. Они не требуют дополнительных конденсаторов, а регулировку оборотов можно легко производить с помощью стандартного диммера. На клеммную колодку выводятся шесть или семь выводов.
Зависит от типа двигателя:
- Два идут на щетки коллектора.
- От таходатчика на колодку приходит пара проводов.
- Обмотки возбуждения могут иметь два или три провода. Третий служит для изменения скорости вращения.
Чтобы выполнить реверс двигателя от стиральной машины, следует поменять местами выводы обмотки возбуждения. Если имеется третий вывод, то его не используют.
Схема реверса электродвигателя на ардуино
В конструировании моделей или робототехнике часто применяются небольшие щеточные электродвигатели постоянного тока, для управления которыми используется программируемый микроконтроллер ардуино.
Если вращение двигателя предполагается только в одну сторону, и мощность электродвигателя небольшая, а напряжение питания от 3,3 до 5 вольт, то схему можно упростить и запитать непосредственно от ардуино, но так делают редко.
В моделях с дистанционным управлением, где необходимо использовать реверс моторов с напряжением более 5В, применяют ключи, собранные по мостовой схеме. В этом случае схема подключения двигателя с реверсом на ардуино будет выглядеть подобно тому что изображено ниже. Такое включение применяется чаще всего.
В этом случае схема подключения двигателя с реверсом на ардуино будет выглядеть подобно тому что изображено ниже. Такое включение применяется чаще всего.
В мостовой схеме могут применяться полевые транзисторы или специальное согласующее устройство — драйвер, с помощью которого подключаются мощные моторчики.
В заключение отметим, что собирать схему реверса электродвигателя должен подготовленный специалист. Однако, при самостоятельном подключении необходимо соблюдать условия техники безопасности, выбрать подходящую схему соединения и подобрать необходимые комплектующие, строго следуя инструкции по монтажу. В этом случае у конструктора не возникнет трудностей в подключении и эксплуатации электродвигателя.
Теперь вы знаете, что такое реверс электродвигателя и какие схемы подключения для этого используют. Надеемся, предоставленная информация была для вас полезной и интересной!
Материалы по теме:
- Как сделать простейший электродвигатель своими руками
- Чем отличается переменный ток от постоянного
- Что такое фаза, ноль и заземление
Опубликовано 07. 08.2019 Обновлено 17.06.2021 Пользователем Александр (администратор)
08.2019 Обновлено 17.06.2021 Пользователем Александр (администратор)
Цепи управления прямым/обратным ходом — базовое управление двигателем
Цепи
Если трехфазный двигатель должен вращаться только в одном направлении, и при первоначальной подаче питания обнаруживается, что он вращается в направлении, противоположном желаемому, все, что необходимо, — это поменять местами любые два из трех проводов, питающих двигатель. . Это можно сделать на двигателе или на самом двигателе.
Вращение трехфазного двигателя
После переключения двух линий направление магнитных полей, создаваемых в двигателе, теперь заставит вал вращаться в противоположном направлении. Это известно как реверсирование файла .
Если двигатель должен вращаться в двух направлениях, то ему потребуется пускатель двигателя прямого/обратного хода, который имеет два трехполюсных контактора с номинальной мощностью, а не один, как в обычном пускателе. Каждый из двух разных пускателей электродвигателя питает двигатель с разным чередованием фаз.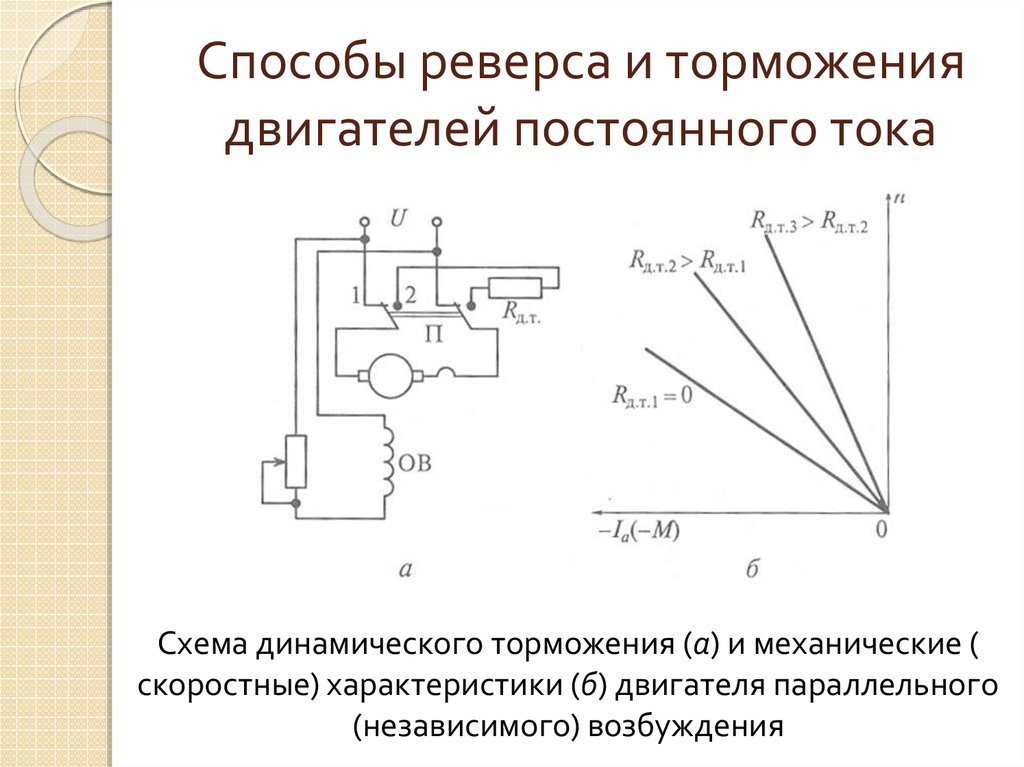
Когда на контактор прямого хода подается питание, силовые контакты соединяют линию L1 с T1, линию L2 с T2 и линию L3 с T3 на двигателе. Когда на контактор реверса подается питание, силовые контакты соединяют линию L1 с T3, линию L2 с T2 и линию L3 с T1 на двигателе.
Силовая цепь прямого/обратного хода
Поскольку два пускателя двигателя управляют только одним двигателем, необходимо использовать только один набор нагревателей реле перегрузки. Обратные пути для обеих катушек пускателя соединяются с цепью пускателя, так что при перегрузке в любом направлении катушки пускателя обесточиваются и двигатель останавливается.
Обратите внимание, что два контактора должны быть и таким образом, чтобы они не могли быть запитаны одновременно. Если на обе катушки стартера одновременно подается напряжение, произойдет короткое замыкание с потенциально опасными последствиями.
Пускатели прямого/обратного хода поставляются с двумя наборами нормально разомкнутых контактов, которые действуют как удерживающие контакты в каждом направлении. Они также поставляются с двумя наборами нормально замкнутых вспомогательных контактов, которые действуют как электрические блокировки.
Они также поставляются с двумя наборами нормально замкнутых вспомогательных контактов, которые действуют как электрические блокировки.
Пускатели прямого/обратного хода никогда не должны замыкать свои силовые контакты одновременно. Лучший способ обеспечить это — электрические блокировки, которые предотвращают подачу питания на одну катушку, если другая катушка задействована. Сбой в электрической блокировке может привести к одновременному включению обеих катушек.
. Если оба находятся под напряжением, требуется некоторая форма механической блокировки, чтобы предотвратить втягивание обоих. движение соседней катушки. Это означает, что даже если обе катушки находятся под напряжением, только один якорь сможет полностью втянуться. Катушка, которая не может втянуться, будет издавать ужасный дребезжащий звук, пытаясь замкнуть магнитную цепь.
На механические блокировки следует полагаться как на крайнюю меру защиты.
Электрическая блокировка достигается путем установки нормально замкнутого контакта катушки одного направления последовательно с катушкой противоположного направления и наоборот.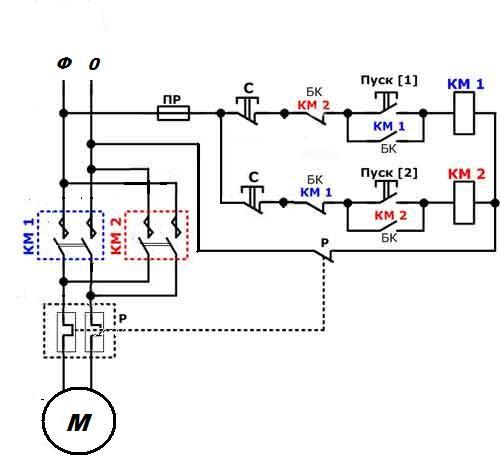 Это гарантирует, что когда передняя катушка находится под напряжением, нажатие на реверс не приведет к возбуждению обратной катушки. Такая же ситуация возникает при включении обратной катушки. В обоих случаях необходимо нажать кнопку останова, чтобы обесточить рабочую катушку и вернуть все ее вспомогательные контакты в исходное состояние. Затем можно включить катушку противоположного направления.
Это гарантирует, что когда передняя катушка находится под напряжением, нажатие на реверс не приведет к возбуждению обратной катушки. Такая же ситуация возникает при включении обратной катушки. В обоих случаях необходимо нажать кнопку останова, чтобы обесточить рабочую катушку и вернуть все ее вспомогательные контакты в исходное состояние. Затем можно включить катушку противоположного направления.
Цепь управления прямым/обратным ходом
При разработке схемы управления для цепей прямого/обратного хода мы начинаем со стандартной, добавляем вторую нормально разомкнутую кнопку и ветвь удерживающего контакта для второй катушки. Одной кнопки остановки достаточно, чтобы отключить двигатель в обоих направлениях.
Две катушки механически заблокированы, а нормально замкнутые контакты мгновенного действия обеспечивают электрическую блокировку.
Если нажата кнопка прямого хода, пока катушка реверса не задействована, ток найдет путь через нормально замкнутый контакт реверса и подаст питание на катушку прямого хода, в результате чего все, что связано с этой катушкой, изменит свое состояние.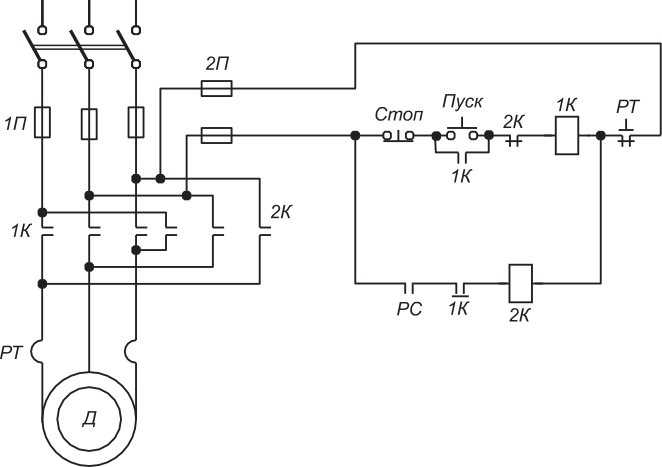 Закроется, и нормально замкнутая электрическая блокировка разомкнется. Если нажать кнопку реверса при включенной катушке прямого хода, ток не сможет пройти через нормально замкнутый контакт прямого хода, и ничего не произойдет.
Закроется, и нормально замкнутая электрическая блокировка разомкнется. Если нажать кнопку реверса при включенной катушке прямого хода, ток не сможет пройти через нормально замкнутый контакт прямого хода, и ничего не произойдет.
Чтобы запустить двигатель в обратном направлении, передняя катушка должна быть обесточена. Для этого необходимо нажать кнопку остановки, после чего кнопка реверса сможет подать питание на катушку реверса.
Независимо от направления вращения двигателя, эта схема будет работать как стандартная трехпроводная схема, обеспечивающая до тех пор, пока не будет нажата кнопка останова или не произойдет .
Блокировка кнопок прямого/обратного хода
Блокировка кнопок требует использования четырехконтактных кнопок мгновенного действия, каждая из которых имеет набор нормально разомкнутых и нормально замкнутых контактов.
Для блокировки кнопок просто соедините нормально замкнутые контакты одной кнопки последовательно с нормально разомкнутыми контактами другой кнопки, и удерживающие контакты будут соединены с нормально разомкнутыми контактами соответствующей кнопки.
Эта цепь по-прежнему требует установки электрических блокировок.
Кнопочная блокировка не требует отключения катушек двигателя перед изменением направления, поскольку нормально замкнутые передние контакты последовательно соединены с нормально разомкнутыми реверсивными контактами, и наоборот. Нажатие одной кнопки одновременно отключает одну катушку и запускает другую. Этот внезапный реверс () может быть тяжелым для двигателя, но если требуется быстрое реверсирование двигателя, эта схема может быть решением.
3 Объяснение простых схем контроллера скорости двигателя постоянного тока
Схема, которая позволяет пользователю линейно управлять скоростью подключенного двигателя путем вращения присоединенного потенциометра, называется схемой контроллера скорости двигателя.
Здесь представлены 3 простые в сборке схемы регулятора скорости для двигателей постоянного тока, одна с использованием MOSFET IRF540, вторая с использованием IC 555 и третья концепция с IC 556 с обработкой крутящего момента.
Можно построить очень крутую и простую схему регулятора скорости двигателя постоянного тока, используя всего один MOSFET, резистор и потенциометр, как показано ниже:
Использование эмиттерного повторителя BJT
Как видно, MOSFET настроен как повторитель истока или общий режим стока, чтобы узнать больше об этой конфигурации, вы можете обратиться к этому сообщению, в котором обсуждается версия BJT, тем не менее принцип работы остался прежним.
В приведенной выше конструкции контроллера двигателя постоянного тока регулировка потенциометра создает переменную разность потенциалов на затворе MOSFET, а исток MOSFET просто следует за значением этой разности потенциалов и соответствующим образом регулирует напряжение на двигателе.
Это означает, что источник всегда будет отставать от напряжения на затворе на 4 или 5 В и изменяться вверх/вниз с этой разницей, представляя переменное напряжение от 2 В до 7 В на двигателе.
Когда напряжение затвора составляет около 7 В, вывод истока будет подавать на двигатель минимум 2 В, вызывая очень медленное вращение двигателя, а 7 В будет доступно на выводе истока, когда регулировка потенциометра генерирует полные 12 В на затворе.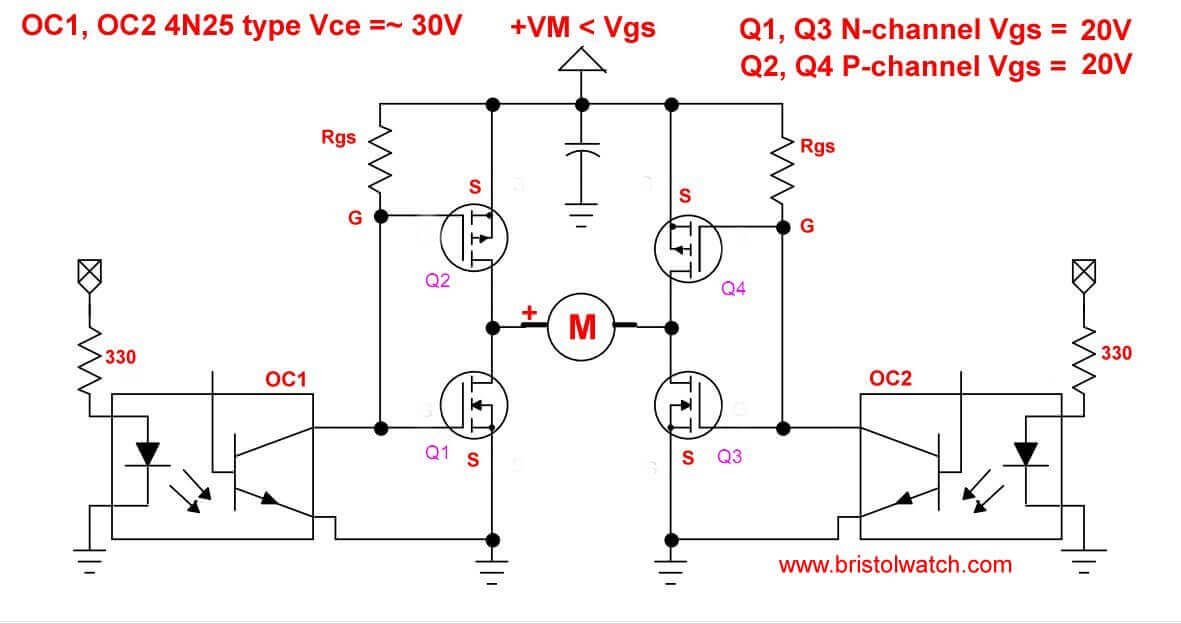 мосфета.
мосфета.
Здесь мы можем ясно видеть, что контакт источника MOSFET, кажется, «следует» за затвором и, следовательно, является последователем источника имени.
Это происходит потому, что разница между затвором и истоком MOSFET всегда должна быть около 5 В, чтобы MOSFET работал оптимально.
В любом случае, приведенная выше конфигурация помогает обеспечить плавное регулирование скорости двигателя, и такая конструкция может быть построена довольно дешево.
Вместо MOSFET можно также использовать биполярный транзистор, и на самом деле биполярный транзистор обеспечивает более высокий диапазон регулирования от 1 до 12 В на двигателе.
Видеодемонстрация
Когда дело доходит до равномерного и эффективного управления скоростью двигателя, идеальным вариантом становится контроллер на основе ШИМ, здесь мы узнаем больше о простой схеме для реализации этой операции.
Использование полевого МОП-транзистора в качестве мощного потенциометра
На следующем рисунке ниже показана очень простая схема регулятора скорости двигателя постоянного тока, в которой полевой МОП-транзистор используется в качестве мощного потенциометра (реостата). Схема предназначена для работы с двигателями постоянного тока на 12 В, потребляющими пиковый ток менее 5 ампер.
Питание от сети переменного тока подается через выключатель S1 на первичную обмотку разделительного и понижающего трансформатора T1. Схема двухтактного выпрямителя двухполупериодного выпрямления D1 и D2 выпрямляет выходной сигнал T1, а результирующий нефильтрованный выход постоянного тока в определенной степени сглаживается конденсатором C1 для получения относительно постоянного потенциала постоянного тока.
На этом выходе постоянного тока может быть значительный уровень пульсаций, однако в данном приложении это не имеет значения. Tr1 обеспечивает питание нагрузки и смещается через цепь резистивного делителя, состоящую из R1, VR1 и R2.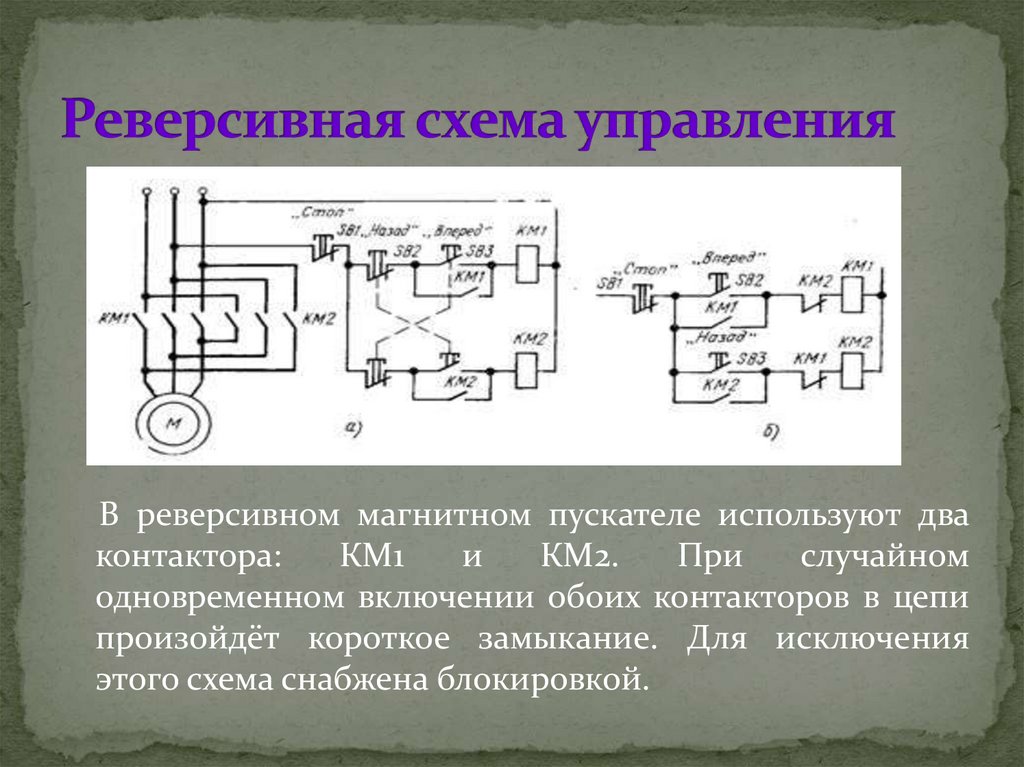
Напряжение смещения затвора, подаваемое на Tr1, может быть недостаточным для того, чтобы полевой МОП-транзистор мог нормально проводить ток с движком VR1 в конце вращения R2, и двигатель не будет работать.
Перемещение движка VR1 к противоположному концу его вращения позволяет постоянно увеличивать смещение на Tr1, что приводит к неуклонному уменьшению сопротивления стока к истоку.
Из-за этого мощность, подаваемая на двигатель, увеличивается вместе со скоростью двигателя, пока Tr1 не достигнет насыщения (когда двигатель работает на полной скорости). Таким образом, VR1 можно использовать для изменения скорости двигателя от минимальной до максимальной.
C2 отфильтровывает любой шум сети или другие электрические помехи, которые в противном случае могли бы быть уловлены схемой затвора Tr1 с высоким импедансом, предотвращая снижение скорости двигателя до нуля.
D3 — это защитный диод, который подавляет любые чрезмерные скачки обратного напряжения, которые могут возникнуть в результате чрезмерной индуктивной нагрузки двигателя.
Конструкцию простого контроллера скорости двигателя, использующего ШИМ, можно понять следующим образом:
Первоначально, когда на схему подается питание, триггерный контакт находится в низком логическом положении, поскольку конденсатор C1 не заряжен.
Вышеупомянутые условия инициируют колебательный цикл, в результате чего на выходе устанавливается высокий логический уровень.
Высокий выход теперь заставляет конденсатор заряжаться через D2.
При достижении уровня напряжения, составляющего 2/3 напряжения питания, срабатывает контакт №6, который является порогом срабатывания микросхемы.
В момент срабатывания контакта №6 контакты №3 и №7 возвращаются к низкому логическому уровню.
При низком уровне на контакте №3 конденсатор C1 снова начинает разряжаться через D1, и когда напряжение на C1 падает ниже уровня, составляющего 1/3 напряжения питания, контакты №3 и №7 снова становятся высокими, вызывая цикл следовать и продолжать повторять.
Интересно отметить, что C1 имеет два дискретно установленных пути для процесса зарядки и разрядки через диоды D1, D2 и через плечи сопротивления, установленные потенциометром соответственно.
Это означает, что сумма сопротивлений, с которыми сталкивается C1 во время зарядки и разрядки, остается неизменной независимо от того, как установлен потенциометр, поэтому длина волны выходного импульса всегда остается неизменной.
Однако, поскольку периоды времени зарядки или разрядки зависят от значения сопротивления, встречающегося на их пути, потенциометр дискретно устанавливает эти периоды времени в соответствии со своими настройками.
Поскольку периоды времени заряда и разряда напрямую связаны с выходным рабочим циклом, они варьируются в зависимости от регулировки потенциометра, придавая форму предполагаемым переменным ШИМ-импульсам на выходе.
Среднее значение соотношения метка/пробел дает выход ШИМ, который, в свою очередь, управляет скоростью двигателя постоянного тока.
Импульсы ШИМ подаются на затвор MOSFET, который реагирует и регулирует ток подключенного двигателя в ответ на настройку потенциометра.
Уровень тока через двигатель определяет его скорость и, таким образом, реализует эффект управления через потенциометр.
Выходная частота микросхемы может быть рассчитана по формуле:
F = 1,44(VR1*C1)
МОП-транзистор можно выбрать в соответствии с требованиями или током нагрузки.
Принципиальную схему предлагаемого регулятора скорости двигателя постоянного тока можно увидеть ниже:
Прототип:
Доказательство видеотестирования:
В приведенном выше видеоролике мы можем увидеть, как конструкция на основе IC 555 используется для управления скоростью двигателя постоянного тока. Как вы можете убедиться, хотя лампочка отлично реагирует на ШИМ и меняет свою интенсивность от минимального свечения до максимально слабого, двигатель не работает.
Сначала двигатель не реагирует на узкие ШИМ, а запускается рывками после того, как ШИМ настроены на значительно большую ширину импульса.
Это не означает, что в цепи есть проблемы, это связано с тем, что якорь двигателя постоянного тока плотно удерживается между парой магнитов. Чтобы инициировать запуск, якорь должен совершить скачкообразное вращение через два полюса магнита, что невозможно при медленном и мягком движении. Он должен начинаться с толчка.
Именно поэтому двигатель изначально требует более высоких настроек ШИМ, и как только начинается вращение, якорь получает некоторую кинетическую энергию, и теперь достижение более низкой скорости становится возможным за счет более узких ШИМ.
Тем не менее, доведение вращения до состояния едва движущегося медленного может быть невозможным по той же причине, что описана выше.
Я изо всех сил старался улучшить реакцию и добиться максимально медленного управления ШИМ, внеся несколько изменений в первую диаграмму, как показано ниже:
Сказав это, двигатель может демонстрировать лучшее управление на более медленных уровнях, если двигатель прикреплен или привязан к грузу через шестерни или систему шкивов.
Это может произойти из-за того, что нагрузка будет действовать как демпфер и поможет обеспечить контролируемое движение при более медленной регулировке скорости.
Еще одна простая схема ШИМ-контроллера двигателя постоянного тока
Схема №3: использование одного операционного усилителя
Описанная ниже схема операционного усилителя может использоваться для регулирования скорости и направления вращения двигателя. Он работает как повторитель напряжения, а его положительный вход (контакт № 3) подключен к потенциометру R3, который работает как контроллер двойного назначения для скорости и направления двигателя.
В средней точке диапазона потенциометра выходной сигнал операционного усилителя близок к нулю, поэтому ни Q1, ни Q2 не проводят ток. Перемещение ползунка потенциометра в сторону положительного полюса приведет к тому, что выход операционного усилителя станет положительным, позволяя Q1 проводить ток к двигателю и увеличивать его скорость.
Регулировка потенциометра в сторону отрицательного напряжения приведет к тому, что выход операционного усилителя станет отрицательным, что приведет к включению транзистора Q2 и выключению транзистора Q1. Это действие изменяет направление вращения двигателя.
Это действие изменяет направление вращения двигателя.
В зависимости от направления вращения скорость двигателя увеличивается, когда движок потенциометра перемещается к любому концу его диапазона. Чтобы определить максимально допустимый диапазон напряжения постоянного тока для выбранного двигателя, может потребоваться контроль изменения напряжения на эмиттерах транзисторов Q1 и Q2.
Изменение скорости двигателя постоянного тока может показаться не таким сложным, и вы можете найти множество схем для этого.
Однако эти схемы не гарантируют постоянного уровня крутящего момента при более низких скоростях двигателя, что делает их работу весьма неэффективной.
Более того, на очень низких скоростях из-за недостаточного крутящего момента двигатель может заглохнуть.
Еще одним серьезным недостатком является то, что в этих схемах нет функции реверса двигателя.
Предлагаемая схема полностью свободна от вышеперечисленных недостатков и способна генерировать и поддерживать высокие уровни крутящего момента даже на минимально возможных скоростях.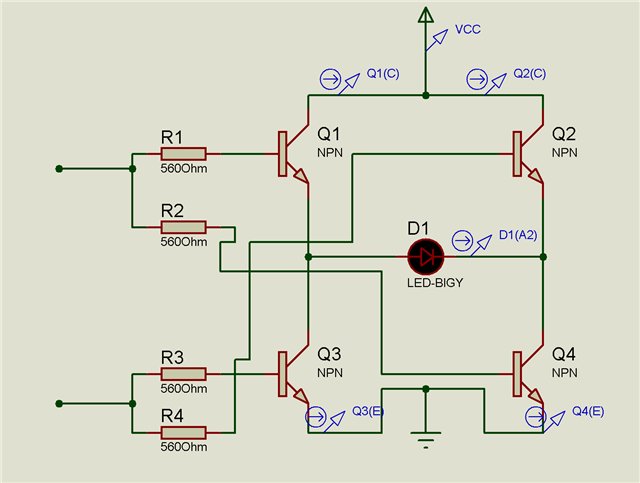
Работа схемы
Прежде чем мы обсудим предлагаемую схему ШИМ-контроллера двигателя, мы также хотели бы изучить более простую альтернативу, которая не так эффективна. Тем не менее, его можно считать достаточно хорошим, пока нагрузка на двигатель не высока и пока скорость не снижена до минимального уровня.
На рисунке показано, как можно использовать одну микросхему 556 для управления скоростью подключенного двигателя, мы не будем вдаваться в подробности, единственным заметным недостатком этой конфигурации является то, что крутящий момент прямо пропорционален скорости двигателя. .
Возвращаясь к предлагаемой схеме контроллера скорости с высоким крутящим моментом, здесь мы использовали две ИС 555 вместо одной или, скорее, одну ИС 556, которая содержит две ИС 555 в одном корпусе.
Принципиальная схема
Основные характеристики
Вкратце предлагаемый контроллер двигателя постоянного тока включает следующие интересные функции:
Скорость можно плавно изменять от нуля до максимума, без остановки.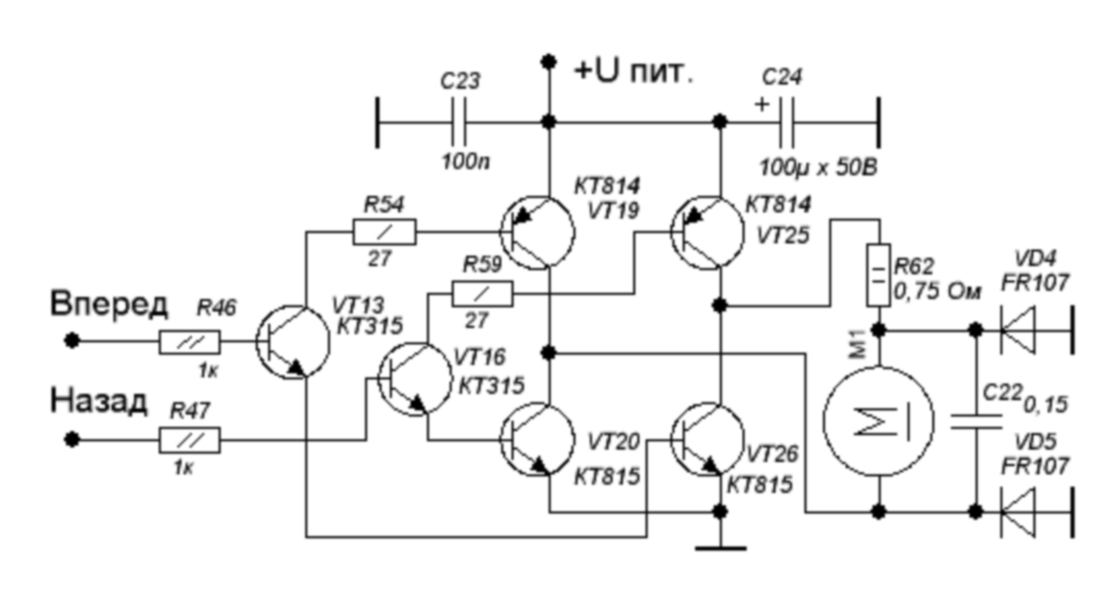
Крутящий момент никогда не зависит от уровней скорости и остается постоянным даже при минимальных уровнях скорости.
Вращение двигателя может быть изменено или реверсировано в течение доли секунды.
Скорость регулируется в обоих направлениях вращения двигателя.
Две микросхемы 555 выполняют две отдельные функции. Одна секция сконфигурирована как нестабильный мультивибратор, генерирующий прямоугольные импульсы с частотой 100 Гц, которые подаются на предыдущую секцию 555 внутри корпуса.
Вышеуказанная частота отвечает за определение частоты ШИМ.
Транзистор BC 557 используется в качестве источника постоянного тока, который поддерживает заряженным соседний конденсатор на его коллекторном плече.
Это создает пилообразное напряжение на вышеупомянутом конденсаторе, которое сравнивается внутри микросхемы 556 с образцом напряжения, приложенного извне по показанной схеме выводов.
Внешнее пробное напряжение может быть получено от простой цепи питания переменного напряжения 0–12 В.
Это изменяющееся напряжение, подаваемое на микросхему 556, используется для изменения ШИМ импульсов на выходе и, в конечном счете, используется для регулирования скорости подключенного двигателя.
Переключатель S1 используется для мгновенного изменения направления вращения двигателя, когда это необходимо.
Перечень деталей
- R1, R2, R6 = 1 кОм,
- R3 = 150 кОм,
- R4, R5 = 150 Ом,
- R7, R8, R9, R10 = 470 Ом, 90
- С2, С3 = 0,01 мкФ,
- C4 = 1UF/25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- 2 T6, T7 = BC547,
- 2222222222222, T6, T7 = BC547,
- 22222222222222222, T7 = BC547,
- —
- IC1 = 556,
- S1 = тумблер SPDT
Приведенная выше схема была вдохновлена следующей схемой драйвера двигателя, которая была давно опубликована в индийском журнале elektor electronic.
Управление крутящим моментом двигателя с помощью ИС 555
Первую схему управления двигателем можно значительно упростить, используя переключатель DPDT для реверсирования двигателя и транзистор эмиттерного повторителя для реализации управления скоростью, как показано ниже:
Улучшенный крутящий момент на низкой скорости с помощью КМОП-ШИМ-управления
Хотя схема контроллера скорости с одним полевым МОП-транзистором, описанная в начале статьи, включает в себя преимущество простоты, у нее может быть несколько недостатков. Один из них заключается в том, что в полевом МОП-транзисторе существует значительный уровень рассеяния, особенно когда скорость двигателя регулируется примерно на 50 процентов от оптимальной. Однако это может быть, конечно, не серьезной проблемой, и просто требует установки умеренно большого радиатора на MOSFET.
Один из них заключается в том, что в полевом МОП-транзисторе существует значительный уровень рассеяния, особенно когда скорость двигателя регулируется примерно на 50 процентов от оптимальной. Однако это может быть, конечно, не серьезной проблемой, и просто требует установки умеренно большого радиатора на MOSFET.
Гораздо более серьезной проблемой является то, что двигатель может заглохнуть, как только этот тип линейного контроллера будет настроен на любую более низкую скорость. Это связано с тем, что MOSFET в этой ситуации имеет относительно высокое сопротивление, что обеспечивает вход питания со значительно высоким выходным сопротивлением.
Когда нагрузка на двигатель увеличивается, он пытается потреблять избыточный ток питания, но это приводит к большему падению напряжения на транзисторе и более низкому напряжению питания на двигателе. В результате мощность, подаваемая на двигатель, существенно не меняется, а скорее снижается. Из-за этого мотор имеет склонность глохнуть. Кроме того, существует обратная реакция, при которой снижение нагрузки на двигатель снижает потребление тока, что приводит к большему напряжению питания и значительному увеличению скорости двигателя.
Кроме того, существует обратная реакция, при которой снижение нагрузки на двигатель снижает потребление тока, что приводит к большему напряжению питания и значительному увеличению скорости двигателя.
Используя контроллер, который подает импульсный ШИМ-сигнал на двигатель, вы можете значительно улучшить управление скоростью двигателя.
Улучшенный крутящий момент с помощью КМОП-ШИМ-управления скоростью
Один из методов реализации этого и тот, который используется здесь, состоит в том, чтобы иметь схему, которая обеспечивает фиксированную длительность выходного импульса при изменении частоты импульсов для изменения скорости двигателя. Низкая частота создает длинные промежутки между импульсами и подает на двигатель относительно небольшую мощность.
При увеличении частоты заметных промежутков между импульсами нет, и двигатель получает почти постоянный сигнал. Это приводит к высокой средней мощности двигателя, который работает на полной скорости. Преимущество этой системы заключается в том, что когда двигатель работает в импульсном режиме, он, по существу, получает полную мощность во время периодов включения импульсов и может потреблять большой ток питания, если этого действительно требует нагрузка на двигатель.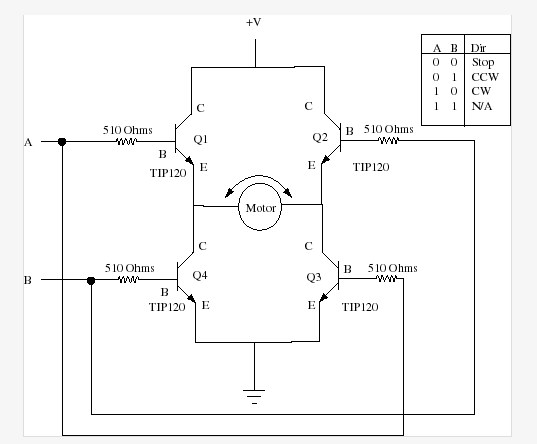
В результате двигатель питается последовательностью сильных импульсов, которые не допускают остановки и обеспечивают повышенный крутящий момент даже на пониженных скоростях.
На следующем рисунке показана принципиальная схема импульсного регулятора скорости двигателя постоянного тока. Здесь T1, D1, D2 и C1 получают достаточный источник постоянного тока от сети переменного тока. Tr1 подключен последовательно с двигателем, но его затвор получает выходной сигнал от схемы нестабильного мультивибратора.
Эта ШИМ-схема построена с использованием двух из четырех вентилей КМОП-устройства 4001, которые используются в нестабильных КМОП-схемах довольно традиционной конструкции.
Можно увидеть пару синхронизирующих резисторов, подключенных между выходом затвора 1 и соединением R1 и C2, что отличается от традиционной конструкции ШИМ. VR1 и R2 — это два резистора, а также направляющие диоды D3 и D4, соединенные последовательно с выходом логического элемента И-НЕ 1.
Два диода гарантируют, что R2 работает как времязадающий резистор всякий раз, когда выход нестабильного устройства высок, а VR1 работает как времязадающий резистор, когда выход низкий.
Период выходных импульсов постоянен, так как R2 имеет заданное значение. Интервал между ними можно изменить, варьируя VR1. Это значение будет почти равно нулю при настройке на минимальное сопротивление. Соотношение выходных меток больше десяти к одному при максимальном сопротивлении. Таким образом,
VR1 можно настроить для создания желаемой скорости двигателя с эффективным крутящим моментом, при этом самая низкая скорость достигается при полном сопротивлении, а самая высокая скорость достигается при нулевом сопротивлении.
Прецизионное управление двигателем с использованием одного операционного усилителя
Чрезвычайно усовершенствованное или сложное управление двигателем постоянного тока. Двигатель может быть достигнут с использованием операционного усилителя и тахогенератора. Операционный усилитель выполнен в виде переключателя, чувствительного к напряжению. В схеме, показанной ниже, как только выходное напряжение тахогенератора становится ниже заданного опорного напряжения, переключающий транзистор включается, и на двигатель подается 100% мощность.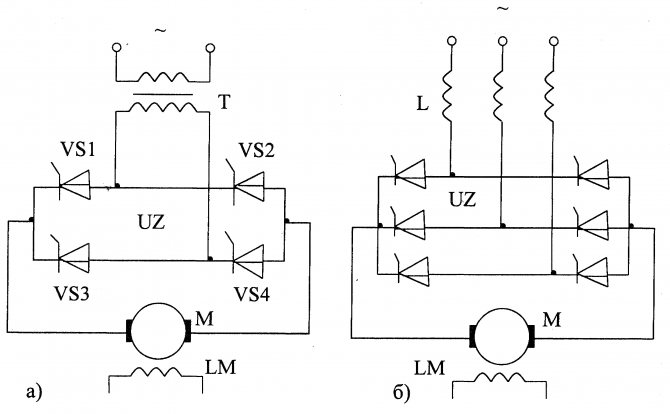
Переключение операционного усилителя произойдет всего за пару милливольт вокруг опорного напряжения. Вам понадобится двойной источник питания, который может быть просто стабилизирован стабилитроном.
Этот контроллер двигателя обеспечивает бесступенчатую регулировку диапазона без каких-либо механических проблем.
Выходной сигнал операционного усилителя составляет всего +/- 10% от уровня питающих шин, таким образом, используя повторитель с двойным эмиттером, можно управлять огромными скоростями двигателя.
Опорное напряжение может быть зафиксировано с помощью термисторов, LDR и т. д. Экспериментальная установка, показанная на принципиальной схеме, использовала операционный усилитель RCA 3047A и двигатель 0,25 Вт 6 В в качестве тахогенератора, который генерировал около 4 В при 13000 об/мин для предполагаемой обратной связи.
Дополнительные схемы :
ШИМ-управление двигателем с использованием только биполярных транзисторов
Следующая схема также использует принцип ШИМ для желаемого управления скоростью двигателя, однако она не зависит от каких-либо интегральных схем или ИС, а использует только обычные биполярные транзисторы. для реализации. Я взял это со страницы старого журнала.
для реализации. Я взял это со страницы старого журнала.
Цепи управления двигателем с использованием LM3524
IC LM3524 представляет собой специализированную схему ШИМ-контроллера, которая позволяет нам настраивать очень полезные и точные схемы управления скоростью двигателя, как описано ниже:
На приведенной выше схеме показана базовая схема управления двигателем ШИМ с использованием ИС LM3524. В конструкцию дополнительно включено управление с обратной связью на базе датчиков через микросхему LM2907.
Небольшой магнит прикреплен к валу двигателя таким образом, что во время вращения магнит приближается к трансформатору приемной катушки с железным сердечником. Механизм заставляет вращающийся магнит индуцировать резкий электрический импульс в катушке датчика, который используется LM2907 в качестве триггерного входа и соответствующим образом обрабатывается в качестве управляющего импульса обратной связи для микросхемы LM3524.
Система обратной связи гарантирует, что заданная скорость никогда не отклонится от заданного значения, обеспечивая точный контроль скорости.