Содержание
Как правильно выполняется реверсивное управление двигателями постоянного тока электродвижка ардуино
Схема управления двигателем постоянного тока, реверсирование и реверсивное управление мотором
Реверсирование и замедление двигателей постоянного тока электронный механизм arduino и электронная схема управления.
Основная схема пластического запуска и остановки без содействия переключателей в обе стороны. Главной опорой данной схемы стоит простой резистор, который удерживает вращение прибора в среднем состоянии, а при крайних плавно начинает вращать электродвигатель в обоих направлениях. Такое применение подходит для 12в электромотора, его питания и схемы в целом, также управления при неизменном потоке, которое подробно описано далее.
Включение неизменчивого тока прямым запуском, возможно только с механизмами малой мощности (допустимый пик тока 4-6 кратно номинального). Пуск постоянного течения в носителях с более сильным мотором совершается с использованием пускового реостата, он же и регулирует допустимые значения для поддержки механической прочности, как это было описано в схеме.
Нормальный ток необходим при запуске движок, должен развивать довольно большой разгон. Для этого акселерометр последовательно уменьшает сопротивление при перемене рычага с одного неподвижного контакта на другой. Снижение сопротивления также возможно замыкания ненадолго секций, с помощью контакторов. В противовес пускового, регулировочный реостат рассчитан на долговременное прохождение тока. Но, происходит большая потеря энергии во время работы инструмента, результатом чего кпд в моторе убавляется.
При ручном запуске или автомате, ток меняется от максимально допустимого, 1,8-2,5 – кратному номинальному в начале, и при противодействии аппаратуры до минимального, 1,1 – 1,5 кратному номинальному в конце. Также такие значения будут при переключении на другое положение пускового реостата.
Реверсирование
Реверсирование – смена вращений двигателя, в котором нужно переключиться на обмотку или якорь, но для верпа сила будет течь в другом направлении. Так званые регуляторы, которые используются для моторчиков с неизменным течением. Реверс используется переменой фаз в сети переменного тока. Возможно в автоматическом действии с заменой сигнала, и также после определения нужного действия на логический вход. В обоих случаях направление искры в якоре будет противоположным.
Реверс используется переменой фаз в сети переменного тока. Возможно в автоматическом действии с заменой сигнала, и также после определения нужного действия на логический вход. В обоих случаях направление искры в якоре будет противоположным.
Основные тактики для возврата механизма:
- Контакторный, используется очень редко.
- Статический способ. В основном это изменение полярности или направления тока.
- Реверсирование с магнитным пускателем.
- Реверс электродвижка с асинхронными прямыми частотными преобразователями. Используется вместе с векторным управлением в замкнутой системе и датчиком обратной связи. Аналогично и регулирование аккумулятора с непрерывным током.
Реверс с постоянными магнитами производится с помощью изменения полярности питания пусковых устройств, тогда ротор начинает вращаться в другую сторону. В этом случае можно регулировать скорость вращения. В основном управление происходит по 2-х проводной линии (тиристорами).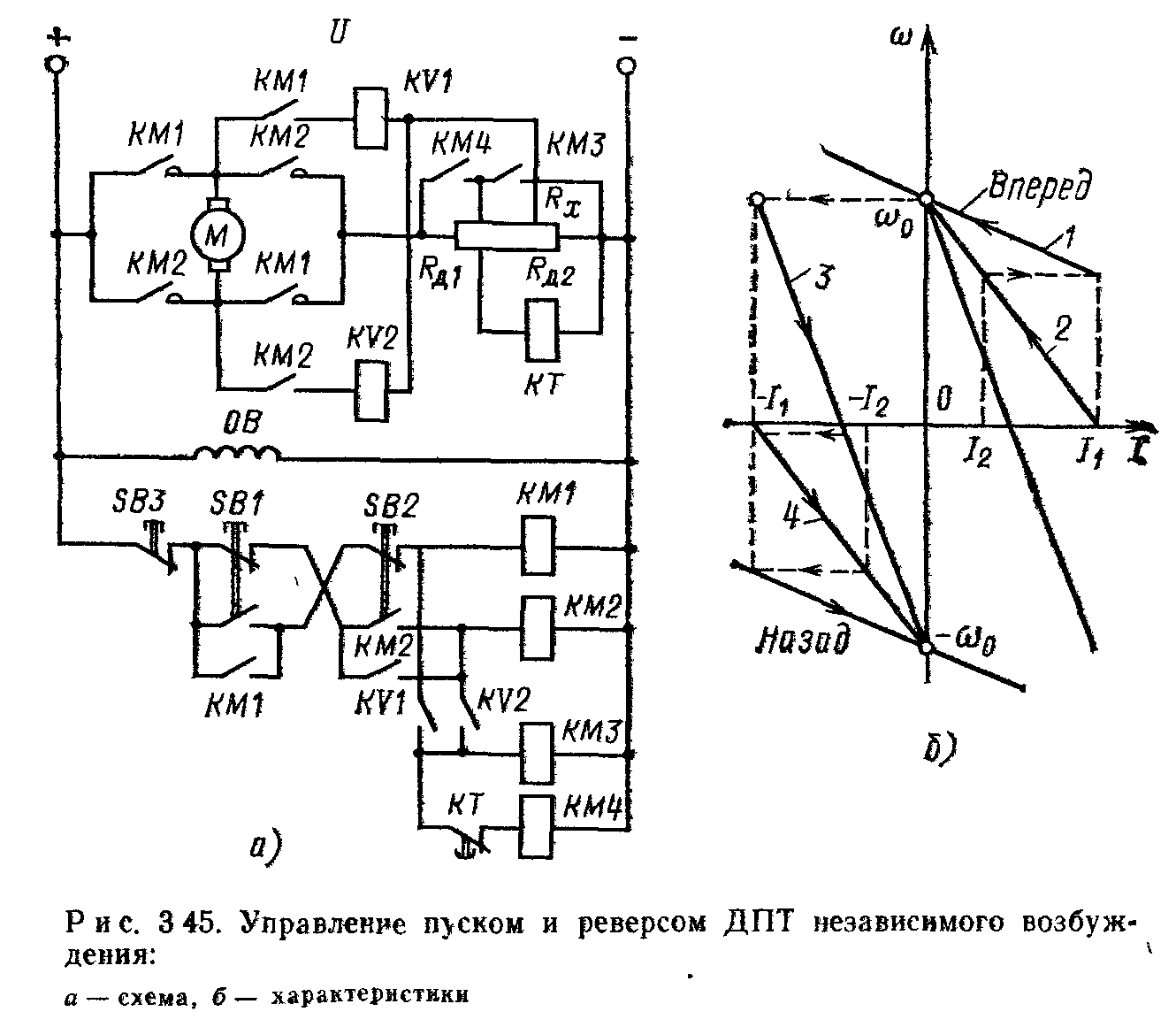 Также изменения реверсивности на большой мощности следует на якоре. Неправильное возбуждение обмотки производит к неисправностям, из-за повышенного напряжения возможна изоляция обмоток и выход аппарата из строя. Поэтому нужно правильно собрать оборудования по технической характеристике.
Также изменения реверсивности на большой мощности следует на якоре. Неправильное возбуждение обмотки производит к неисправностям, из-за повышенного напряжения возможна изоляция обмоток и выход аппарата из строя. Поэтому нужно правильно собрать оборудования по технической характеристике.
Осуществляется реверс моторов последовательного возбуждения возможно с помощью переходов или обвиванием возбуждения якоря, потому что энергические запасы в якорях и обвивках не очень большие и время непрерывного переключения небольшие.
Возвращение с параллельным возбуждением в якоре сначала нужно отключить от питания, поэтому моторчик автоматически тормозится. Когда он заканчивает тормозить, якорь переключается, если он не переключился во время торможения, тогда запуск начинается при вращении в обратную сторону. В той же градации придерживается и реверсирование для последовательного возбуждения:
- Выключение
- Замедление
- Переключение
- Пуск в обратную сторону
Реверс основного инструмента с разнообразным включением нужно перевести на якорек или прямую обмотку разом с параллельной обмоткой.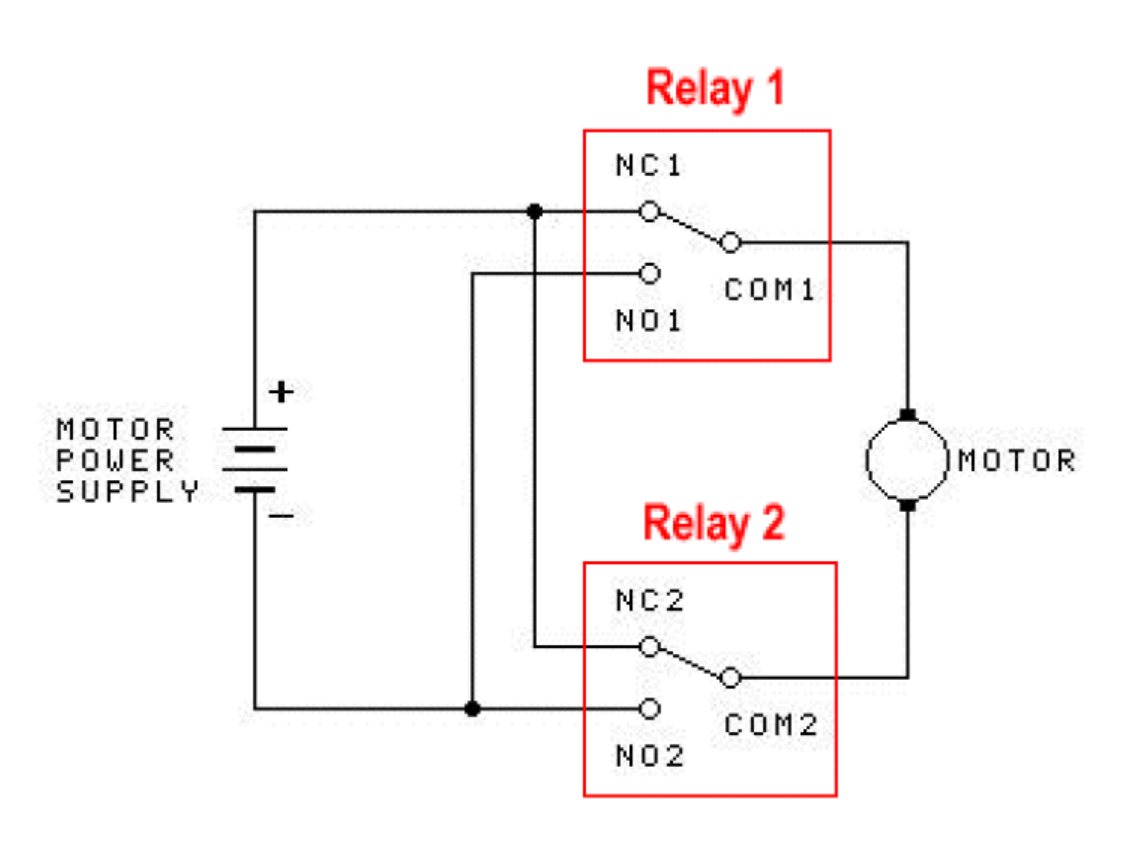
Пуск и торможение
Торможение с постоянным током связано с, конечно же, мощностью. Поскольку прямое подключение возможно на малых мощностях сердца аппарата, во всех следующих обстоятельствах можно использовать только пусковой реостат. Он определяет позволенные значения и определяет допустимый ток.
Реостат представляет собою провод, рассортирован на секции с большим сопротивлением. В переходах зафиксированы медные кнопочки или контакты, к ним можно присоединять провод. При запуске сопротивление оборудования должно уменьшаться по порядку. Чтобы уменьшить время работы мотора, нужно замедление, так как при его отсутствии может быть слишком большое количество. Также замедление нужно для фиксирования приводимых приборов в нужном порядке положения.
Выключение возможно на двух типов: электрическое и механическое
Механистическая остановка в основном делается с помощью накладки колодок на тормозной шкив. Нехватка самопроизвольного тормоза: Момент остановки невозможно предугадать из-за случайностей. Если масло, или жидкость попадет на шкив тормоза данное замедление возможно, когда период времени и тормозного пути не ограничены.
Если масло, или жидкость попадет на шкив тормоза данное замедление возможно, когда период времени и тормозного пути не ограничены.
В аварийных ситуациях после прежнего электрического торможения на небольшом темпе движения можно сделать полную остановку инструмента. Зафиксировать положение прибора в определенном месте.
Электрическая остановка создает точный момент торможения. Так как фиксация невозможна в нужном месте, механическим путем оно дополняется и входит в работу после окончания работы электрического. Такой тормоз возможен, когда ток идет в траектории согласно ЭДС движка.
Доступные три вида торможения:
- Стоп мотора беспрестанного потока с возвращением энергии. Кинетическая энергия должна превратиться в электрическую, часть с которой попадает обратно в сеть. Стоп выполнено, когда напряжение уменьшается при любом загруженности машинного оборудования.
- При противоположном включении. С помощью вращающегося аппарата переключается на противоположное направление вращения.
 В нем напряжение складывается, следовательно, нужно включить резистор для ограничения силы с сопротивлением. Такое замедление берет большую затрату энергии.
В нем напряжение складывается, следовательно, нужно включить резистор для ограничения силы с сопротивлением. Такое замедление берет большую затрату энергии. - Динамическое. Делается при включении на зажимах в сердце резистора мотора. Кинетическая запасная энергия превращается в электрическую энергию и рассеивается. Такое замедление очень распространенный.
 В нем напряжение складывается, следовательно, нужно включить резистор для ограничения силы с сопротивлением. Такое замедление берет большую затрату энергии.
В нем напряжение складывается, следовательно, нужно включить резистор для ограничения силы с сопротивлением. Такое замедление берет большую затрату энергии.Пуск, возврат и замедление двигателей постоянного тока выполняется с соблюдением технологических требований и правилам безопасности.
Arduino возврат электромотора для 12 вольтовых инструментов
При собирании моделей часто используются малые щеточные электромоторы с постоянным током. Для их управления используется микроконтроллер arduino, который запрограммирован к ручному управлению.
Поэтому, если вращения в нем предполагается в одну сторону с небольшой мощностью в двигателе, а также напряжения от 3,3 до 5ти Вт, то схему можно упростить.
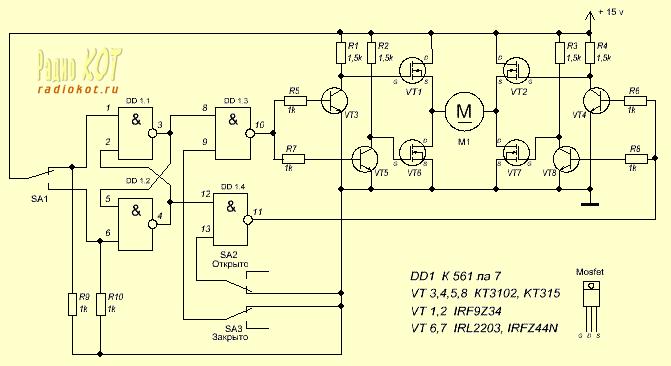
В такой модели дистанционного управления нужно использовать возвращение моторов с мощностью более 5 Вт. В данном микроконтроллере используют ключи, сделанные по мостовой схеме. Ниже на картинке можно увидеть универсальную схему подключения двигателя с реверсом на ардуино. Таким способом могут использоваться полевые транзисторы или драйвер (специально изготовление устройство), оно помогает подключить мощные моторчики. Собирать данную схему должен обученный специалист, при самостоятельном установлении нужно соблюдать меры безопасности.
В данном микроконтроллере используют ключи, сделанные по мостовой схеме. Ниже на картинке можно увидеть универсальную схему подключения двигателя с реверсом на ардуино. Таким способом могут использоваться полевые транзисторы или драйвер (специально изготовление устройство), оно помогает подключить мощные моторчики. Собирать данную схему должен обученный специалист, при самостоятельном установлении нужно соблюдать меры безопасности.
Заключение: Реверсирование и выключение приборов постоянного тока является очень гибким приводным приборам, которое используется там, где не нужны большие моменты при старте. Механизм имеет надежные цепи регулировки скорости вращения и простой при запуске в ход орудия.
Схема реверсивного управления электродвигателем двумя тактовыми кнопками своими руками
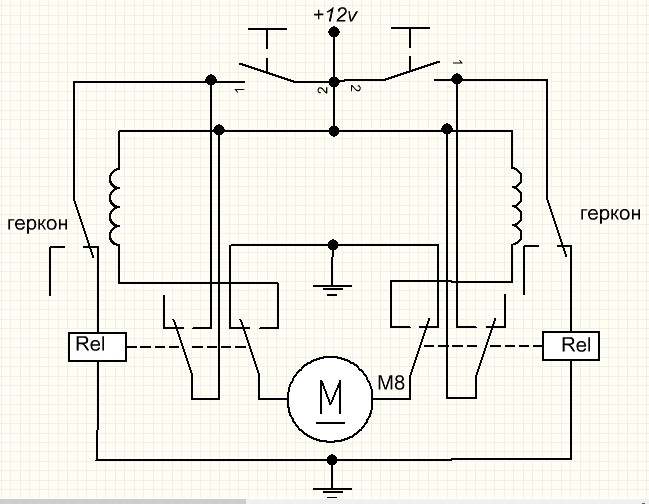
Устройство предназначена для управления электродвигателя для детских игрушек, работающего от пальчиковой батарейки.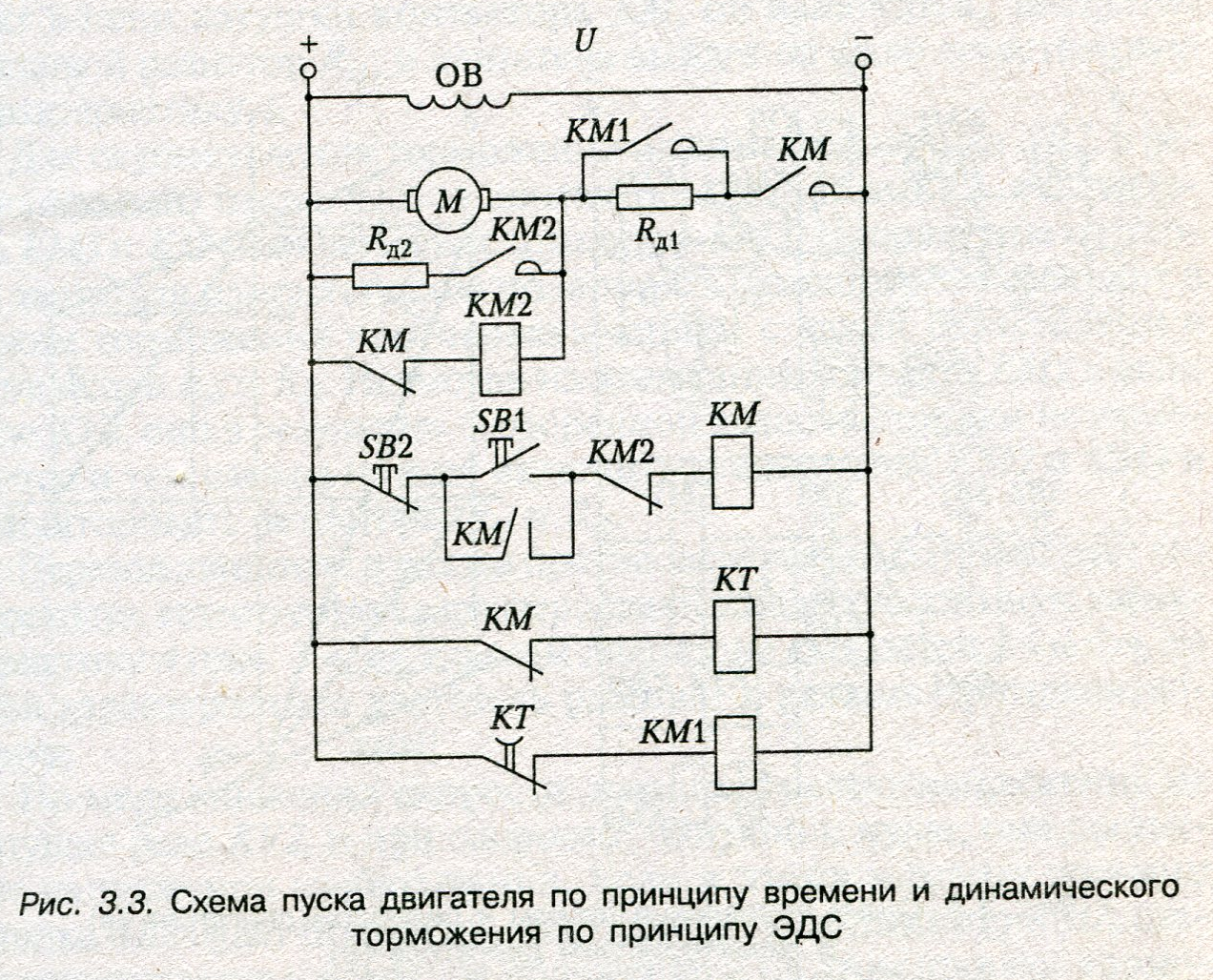 Осуществляет его включение с выбором направления вращения ротора. Функции элементов управления выполняют копки на замыкание, предусмотрена также светодиодная индикация.
Осуществляет его включение с выбором направления вращения ротора. Функции элементов управления выполняют копки на замыкание, предусмотрена также светодиодная индикация.
Основные достоинства схемы
- Первый и главный плюс: не требуется использовать громоздкий переключатель с несколькими контактными группами для реверса;
- при сборке используются недефицитные компоненты;
- не требуется подборка транзисторов по параметрам;
- возможно применение даже разнотипных транзисторов при условии близости их максимальной рассеиваемой мощности и совпадения структуры.
Схемные особенности устройства
Принципиальная схема представлена на рисунке и состоит фактически из двух идентичных транзисторных ключей.
Транзисторы работают в ключевом режиме и включаются последовательно с нагрузкой, которой является маломощный электродвигатель М постоянного тока. При нажатии на кнопку Кл1 плюс источника питания поступает на один из выводов электродвигателя и через резистор R1 – на базу транзистора Т1. Последний открывается, через электродвигатель М протекает ток и его ротор начинает вращаться. Одновременно начинает светиться светодиод Сд1, ток через который ограничивается резистором R3.
Последний открывается, через электродвигатель М протекает ток и его ротор начинает вращаться. Одновременно начинает светиться светодиод Сд1, ток через который ограничивается резистором R3.
При замыкании кнопки Кл2 ровно таким же образом работает второе плечо и поставленный ему в соответствие индикаторный светодиод. Отличие состоит в том, что ток через электродвигатель М протекает в противоположном направлении. Соответственно, его ротор вращается в другую сторону.
Максимальный ток через транзисторы Т1, Т2 ограничивается сопротивлением электродвигателя М. Конденсатор С выполняет функции элемента защиты от перенапряжений в момент коммутации.
Элементная база
Устройство собирается на следующих компонентах:
- двух транзисторах ВС547 (цоколевка представлена далее) — http://alii.pub/5l6vyg
- конденсаторе номиналом 100 нФ — http://alii.pub/5n14g8
- трех резисторах с сопротивлением 220 Ом — http://alii.pub/5h6ouv
- двух светодиодах красного и зеленого цветов свечения с рабочем током до 50 мА — http://alii. pub/5lag4f
- двух кнопках на замыкание без фиксации — http://alii.pub/5nnu8o
 pub/5lag4f
pub/5lag4fМонтаж и наладка
Из-за небольшого количества компонентов монтаж может быть выполнен на весу с пайкой выводов радиодеталей друг на друга и использованием в качестве несущей платформы электродвигателя. Выводы элементов в местах пересечения друг с другом следует защитить кембриками.
Припаиваем конденсатор в начале в полюсам двигателя.
Формуем вывода транзисторов и припаиваем по схеме.
Припаиваем резисторы. Вывод одного изолируем кембриком.
Шину сделаем из куска медной проволоки.
Соединяем кнопки последовательно и припаиваем.
Подключаем провода питания.
Соединяем светодиоды паралельно и подключаем к семе через резистор.
Устройство не требует наладки и при правильной сборке начинает функционировать немедленно после подключения питания и нажатия на одну из управляющих кнопок.
Смотрите видео
Как сделать схему управления двигателем.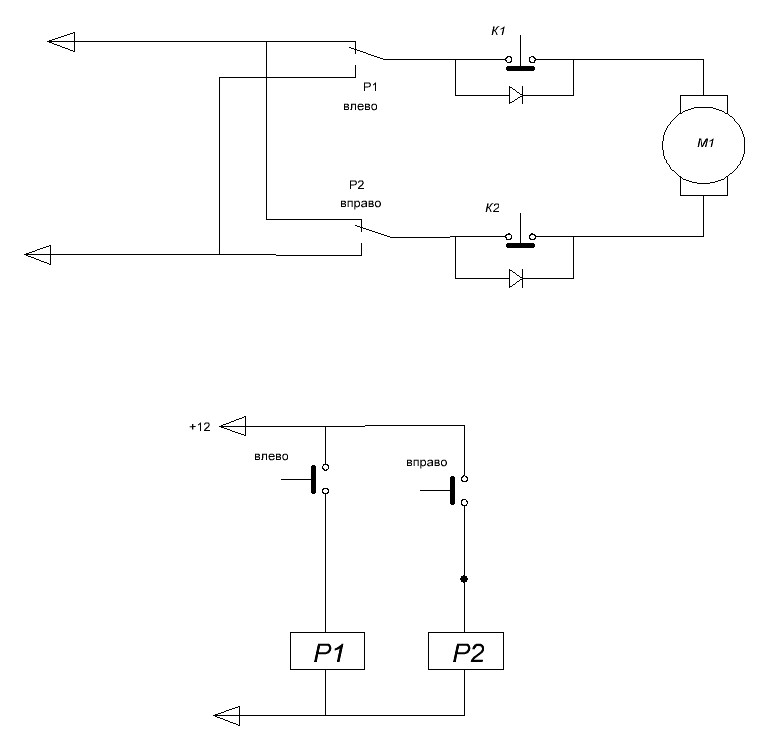 Включение и реверс двумя кнопками — https://sdelaysam-svoimirukami.ru/7052-kak-sdelat-shemu-upravlenija-dvigatelem-vkljuchenie-i-revers-dvumja-knopkami.html
Включение и реверс двумя кнопками — https://sdelaysam-svoimirukami.ru/7052-kak-sdelat-shemu-upravlenija-dvigatelem-vkljuchenie-i-revers-dvumja-knopkami.html
Управление двигателем постоянного тока с использованием H-моста
В этой статье объясняется, как можно изменить направление и скорость мини-двигателя постоянного тока, используя очень простую схему, построенную с использованием легкодоступных и подручных компонентов. Сначала мы увидим, как мы можем изменить направление двигателя, а затем мы увидим, как мы можем изменить скорость двигателя постоянного тока. Затем я объясню очень простую схему контроллера двигателя постоянного тока, которая меняет направление, а также скорость двигателя постоянного тока. Итак, давайте начнем.
Подскажите, как изменить направление вращения двигателя постоянного тока?
Это очень просто. Большинство мини-двигателей постоянного тока имеют две клеммы, потому что они являются двигателями постоянного тока последовательного типа (якорь и обмотки возбуждения соединены последовательно). Пожалуйста, обратитесь к рисунку, приведенному ниже.
Пожалуйста, обратитесь к рисунку, приведенному ниже.
Рис. 1: Изображение, показывающее схему H-моста, используемую для управления направлением вращения двигателя постоянного тока
Как показано на рисунке, есть две клеммы «A» и «B» двигателя постоянного тока. Теперь, если мы соединим клемму A с питанием +Ve и клемму B с питанием -Ve или заземлением, ток будет течь от двигателя от A к B, и двигатель будет вращаться в одном направлении — скажем, по часовой стрелке (CW) или в прямом направлении. Теперь, как показано на втором рисунке, мы меняем клеммы питания. Теперь B подключен к +Ve, а A подключен к земле. Ток будет течь от двигателя от B к A, и двигатель будет вращаться в другом направлении (против часовой стрелки – против часовой стрелки или наоборот).
Итак, следующий вопрос: как обеспечить реверсивное питание двигателя?
Расположение показано в правой части рисунка. Четыре переключателя подключены между источником питания +Ve и землей, а двигатель постоянного тока подключен между двумя переключателями, как показано на рисунке.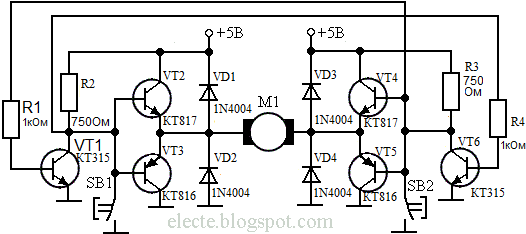 Такое расположение цепей известно как Н-мост, потому что он выглядит как буква «Н» (схемы Н-моста наиболее широко используются в драйверах двигателей постоянного тока). Давайте посмотрим, как он дает обратное питание двигателю.
Такое расположение цепей известно как Н-мост, потому что он выглядит как буква «Н» (схемы Н-моста наиболее широко используются в драйверах двигателей постоянного тока). Давайте посмотрим, как он дает обратное питание двигателю.
Если одновременно нажать SW1 и SW4, то ток будет течь от +Ve – SW1 – A – B – SW4 – Gnd. Таким образом, двигатель будет вращаться в одном направлении. Откройте (отпустите) SW1 и SW4, чтобы остановить двигатель. Теперь, если SW2 и SW3 нажаты, ток будет течь от +Ve – SW2 – B – A – SW3 – Gnd. Таким образом, двигатель получает обратное питание, и он будет вращаться в другом направлении.
(Внимание: необходимо соблюдать осторожность, чтобы SW1 и SW3 или SW2 и SW4 не были нажаты одновременно, иначе произойдет короткое замыкание питания)
управление скоростью и вращением двигателя постоянного тока
Схема заменяет переключатели транзисторами типа NPN. Все мы знаем, что транзистор работает как переключатель. Для NPN-транзистора, если мы подаем вход +Ve на базу, он включится, а если мы подаём 0, он будет выключен.
Таким образом, в этой схеме, если Q1 и Q4 включены одновременно, двигатель будет вращаться вперед, а если Q2 и Q3 включены, двигатель будет вращаться в обратном направлении.
Разве это не очень просто?
Двигатель можно вращать вперед и назад, используя только 4 транзистора.
Теперь давайте перейдем к изменению скорости двигателя постоянного тока. Скорость двигателя постоянного тока изменяется при изменении приложенного входного напряжения. По мере увеличения приложенного входного напряжения скорость будет увеличиваться и наоборот. При подаче максимального номинального напряжения двигатель будет вращаться на полной скорости (внимание: не подавайте на двигатель напряжение, превышающее максимальное номинальное, иначе обмотки двигателя могут сгореть).
Теперь вопрос, как подать переменное напряжение на двигатель?
Одним из очень популярных методов генерирования переменного напряжения постоянного тока является широтно-импульсная модуляция (ШИМ). Это поясняется на рисунке ниже.
Это поясняется на рисунке ниже.
Рис. 3: График, показывающий широтно-импульсную модуляцию для управления скоростью двигателя постоянного тока
Широтно-импульсная модуляция означает изменение ширины (скважности) импульса. Ширина означает время включения Тон импульса. Среднее выходное напряжение (Vdc или Vavg) определяется уравнением
Vdc = [Ton / (Ton+Toff)] × Vs
Это напрямую зависит от Ton. Как показано на рисунке выше, при коэффициенте заполнения 50 % среднее выходное напряжение Vdc равно половине Vs. Если нагрузка увеличивается до 75%, Vdc также увеличивается до 3/4 Vs, а если нагрузка уменьшается до 25%, Vdc уменьшается до 1/4 th Vs. Таким образом, при изменении ширины импульса изменяется среднее выходное напряжение. Таким образом, мы должны применить ШИМ к двигателю постоянного тока, чтобы изменить его скорость.
Очевидно, следующий вопрос — как генерировать ШИМ?
Есть предположения………..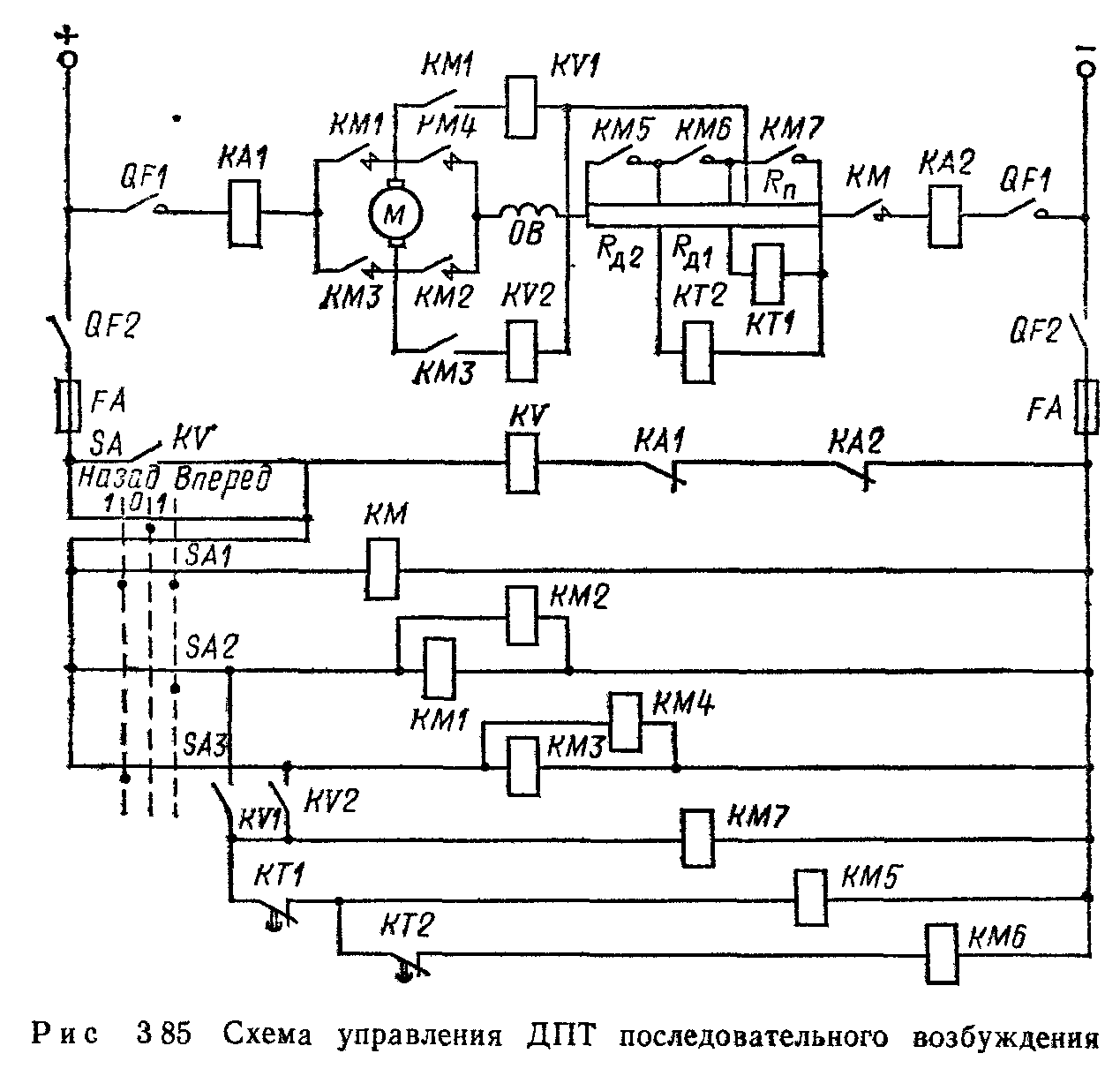 ?
?
Да, ответ IC NE555. Этот чип можно использовать для генерации ШИМ. Вот схема IC NE555 для генерации выхода PWM
Соединения: IC NE555 подключен в нестабильном режиме. Смещение +12 подается на вывод Vcc (8). Контакт сброса (4) также получает питание +Ve для включения внутреннего триггера. Два диода подключены друг к другу на выводе разряда (7). Один резистор 1K подключен между Vcc и разрядным контактом. Потенциометр на 10 К вместе с двумя диодами D1 и D2 подключен между пороговым выводом (6) и разрядным выводом таким образом, что при его увеличении сопротивление заряда конденсатора увеличивается, а сопротивление разряда конденсатора уменьшается.
Операция: когда в цепь подается питание, конденсатор заряжается через R2-D2-R1A. Выход схемы высок. Когда конденсатор заряжается до 2/3 В пост. тока, внутренний пороговый компаратор выдает выходной сигнал, снижающий выходной сигнал схемы. Таким образом, если R1 увеличивается — R1A больше — время зарядки конденсатора увеличивается — время высокого выхода (Ton) больше — рабочий цикл больше. После этого конденсатор разряжается через R1B – D1. Таким образом, если R1 меньше — R1B больше — время разрядки конденсатора увеличивается — время низкого выхода (Toff) больше — рабочий цикл меньше.
После этого конденсатор разряжается через R1B – D1. Таким образом, если R1 меньше — R1B больше — время разрядки конденсатора увеличивается — время низкого выхода (Toff) больше — рабочий цикл меньше.
Таким образом, эта схема генерирует ШИМ, и ширина импульса изменяется при изменении потенциометра R1.
Наконец, нам нужна мостовая схема на транзисторе H для изменения направления двигателя постоянного тока и схема генератора ШИМ на основе микросхемы NE555 для изменения скорости двигателя постоянного тока. Вот полная схема.
Выход схемы генератора ШИМ подается на схему Н-моста через переключатель SPDT. Когда мы меняем положение переключателя SPDT, сигнал подается либо на Q1 и Q4, либо на Q2 и Q3. Таким образом, переключатель SPDT изменяет направление вращения двигателя. А потенциометр R1 изменяет ширину выходного импульса, подаваемого на Н-мостовую схему. Таким образом, изменяется скорость двигателя.
Вот схема, построенная на макетной плате
Рис.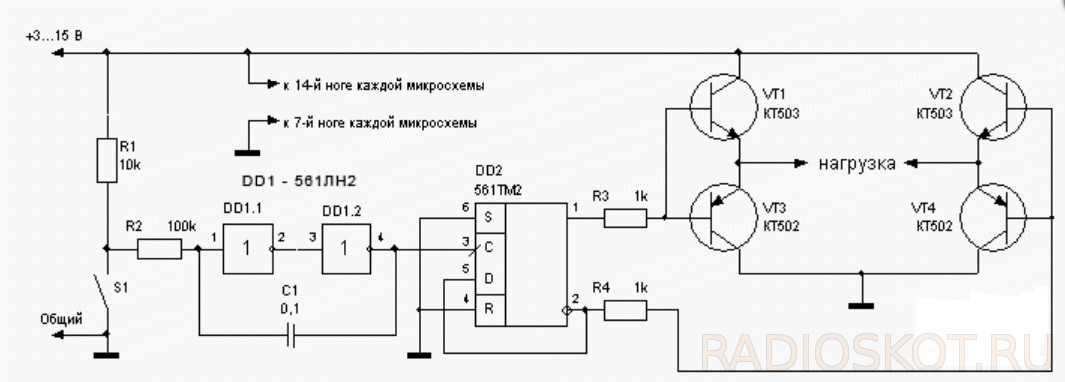 4: Прототип схемы Н-моста на макетной плате
4: Прототип схемы Н-моста на макетной плате
Итак, это простая схема управления скоростью и направлением двигателя постоянного тока. Он может управлять двигателями постоянного тока с номинальным током 12 В или 500 мА. Для двигателей с более высоким номинальным напряжением или током можно использовать транзисторы с парой Дарлингтона (TIP122, TIP142 и т. д.), силовые МОП-транзисторы (серия IRF) или даже SCR (серия TYN)
Принципиальные схемы
Видео проекта
Рубрики: Схема
Контроллер двигателя постоянного тока — информация об электронике от PenguinTutor
Направление двигателя постоянного тока определяется направлением тока через двигатель, поэтому реверсивным положительное и отрицательное питание мы можем заставить двигатели изменить направление.
Схема Н-моста
Конфигурация Н-моста является распространенным способом изменения направления подачи питания. H-мост назван так, потому что он имеет форму буквы H и использует две пары переключателей, которые необходимо переключать вместе. Это проще всего объяснить, используя видео ниже.
Это проще всего объяснить, используя видео ниже.
Пары переключателей расположены по диагонали друг к другу. Каждая пара переключателей должна быть замкнута одновременно. Таким образом, на диаграммах ниже S1 и S4 образуют одну пару, а S2 и S3 — другую пару.
Это Н-мост в выключенном состоянии. Все четыре переключателя выключены, и на двигатель не подается питание.
Когда S1 и S4 замкнуты, положительный источник питания идет слева от двигателя, а отрицательный — справа. После этого двигатель будет работать в одном направлении.
Для изменения направления необходимо разомкнуть переключатели S1 и S4, а затем закрыть S2 и S3. Положительное питание теперь подается справа от двигателя, а отрицательное — слева, поэтому двигатель теперь будет вращаться в противоположном направлении.
Важно, чтобы S1 и S3 никогда не закрывались одновременно, и то же самое с S2 и S4. Их совместное включение может привести к короткому замыканию в источнике питания.
ИС H-моста — SN754410 Quad Half-H драйвер IC
Схема H-моста может быть выполнена с дискретными транзисторами/полевыми транзисторами, интегральной схемой или даже реле (хотя реле затруднило бы реализацию управления скоростью). Для небольших двигателей обычно проще всего использовать интегральную схему (чип) H-моста.
Интегральная схема SN754410 представляет собой счетверенный драйвер Half-H, который содержит четыре модуля. Объединение двух таких модулей обеспечивает единую схему Н-моста. Таким образом, мы можем использовать одну микросхему для управления двумя двигателями.
Схема PIN-кода показана ниже:
На логической схеме показано, как четыре модуля полумоста могут быть сконфигурированы как пара контроллеров H-моста.
Чтобы убедиться, что микросхема подходит, мы должны обратиться к техническому описанию, доступному у производителя (в данном случае Texas Instruments). Согласно техническому описанию микросхема может использоваться для переключения до 1 А для источников питания от 4,5 В до 36 В и включает в себя отдельный источник питания для входа и выхода. Все входы совместимы с логикой TTL и CMOS, которая будет работать как с GPIO от Raspberry Pi, так и с Arduino. Источник питания для IC должен быть 5 В, что такое же, как у Raspberry Pi.
Согласно техническому описанию микросхема может использоваться для переключения до 1 А для источников питания от 4,5 В до 36 В и включает в себя отдельный источник питания для входа и выхода. Все входы совместимы с логикой TTL и CMOS, которая будет работать как с GPIO от Raspberry Pi, так и с Arduino. Источник питания для IC должен быть 5 В, что такое же, как у Raspberry Pi.
Существует два разных способа использования входных сигналов для контроллера H-bridge.
Один из способов — иметь один выход для направления вращения двигателя, который инвертируется между двумя входами, а затем использовать контакт включения для включения и выключения двигателя. Так, например, если бы у вас был вход высокого направления, который перешел бы на вход 1A и инвертировал бы низкий уровень на входе 2A и наоборот, чтобы изменить направление. Для этого потребуются только два входа для SN754410, но потребуется добавить в схему инвертор. Или это можно реализовать, имея три выхода от GPIO, один из которых инвертирован.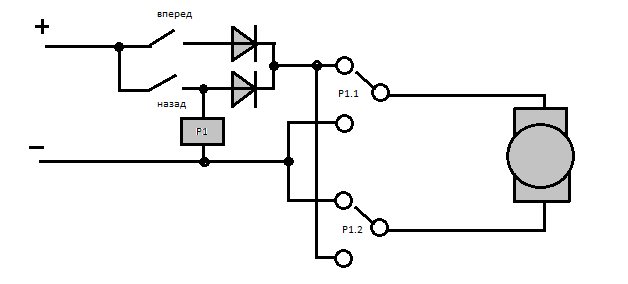
Другой вариант, который мы будем использовать здесь, состоит в том, чтобы постоянно активировать контакт EN, подключив его к высокому уровню, а затем используя два входа для включения и выключения двигателя, а также для определения направления. Это достигается установкой обоих 1A и 2A на низкий уровень, что является выключенным состоянием, а затем переключением одного из них на высокий уровень, чтобы включить двигатель и установить направление.
Принципиальная схема для использования с Raspberry Pi GPIO
На приведенной ниже схеме показано, как можно использовать GPIO для управления контроллером мотора SN754410 H-bridge.
Его можно построить на макетной плате с помощью устройства Raspberry Pi GPIO, как показано ниже.
Он также доступен на печатной плате на основе печатной платы контроллера двигателя Ryanteck.
С диодами или без диодов
Двигатели представляют собой электромагнитные устройства. Это означает, что они используют электронный ток для создания магнитного поля, которое вызывает действие, в данном случае вращение двигателя. Когда питание отключается, магнитное поле разрушается, или, если двигатель продолжает вращаться, он может действовать как генератор. Когда это происходит, может возникнуть скачок напряжения, вызванный обратной ЭДС (электродвижущей силой), которая может повредить чувствительные электронные компоненты. Обычно диод подключается к магнитной нагрузке в обратном направлении, чтобы предотвратить повреждение электронной схемы обратной ЭДС. Они имеют разные названия, включая обратные диоды, диоды свободного хода, ограничительные диоды или фиксирующие диоды.
Когда питание отключается, магнитное поле разрушается, или, если двигатель продолжает вращаться, он может действовать как генератор. Когда это происходит, может возникнуть скачок напряжения, вызванный обратной ЭДС (электродвижущей силой), которая может повредить чувствительные электронные компоненты. Обычно диод подключается к магнитной нагрузке в обратном направлении, чтобы предотвратить повреждение электронной схемы обратной ЭДС. Они имеют разные названия, включая обратные диоды, диоды свободного хода, ограничительные диоды или фиксирующие диоды.
В техническом описании микросхемы SN754410 показана внутренняя схема на основе приведенной ниже схемы. На нем показаны два диода, подключенных в обратном порядке к выходу транзистора, что поможет рассеять скачок напряжения. Однако в том же листе данных также показан пример принципиальной схемы, где подключены внешние диоды.
Добавление внешних диодов обойдется в небольшую сумму (обычно несколько пенсов за диод), однако добавление их на макетную плату сделает схему более сложной и трудной для понимания.