Содержание
Базовая схема для экспериментов с BLDC-моторами (на ATtiny2313) — radiohlam.ru
Представленная ниже схема является основой для экспериментов с bldc-моторами. Для тех, кто не в курсе, BLDC — это одна из разновидностей синхронных моторов, которая используется, например, в винчестерах, сидирумах, дисководах и т.п. (типа таких, как на картинке справа).
Теорию работы синхронных движков в общем виде можно почитать здесь, чуть конкретнее про BLDC — вот здесь.
Схема позволяет организовать необходимое для питания BLDC-моторов трёхфазное напряжение из обычного однофазного (с помощью ШИМ-модуляции).
Никаких специальных возможностей управления работой мотора (по датчикам Холла или по обратной ЭДС обмоток) в этой схеме не предусмотрено. Про различные варианты такого управления мы поговорим позже, а здесь я постараюсь подробно описать исходя из каких соображений и как рассчитываются элементы именно базовой схемы.
Итак, схема:
Как видите, нам понадобятся: 1 контроллер ATtiny2313, 3 микрухи спаренных полевиков FDS4542 (N- и P-channel в одном восьминогом корпусе), 6 биполярных транзисторов (я использовал FMMT2222 — маленькие биполярнички в корпусах SOT23 c маркировкой 1P), 3 диода (я взял LL4148) и некоторое количество всяких резисторов и кондёров. (их номиналы будут указаны ниже).
(их номиналы будут указаны ниже).
Суть схемы довольно простая — микроконтроллер управляет тремя абсолютно аналогичными силовыми каналами (поэтому на схеме показан только один), каждый из которых имеет на выходе комплиментарную пару мощных полевиков, образующую полумост с независимым управлением плечами.
То есть каждое из плеч можно включать и выключать независимо от другого, что даёт возможность получить на выходе полумоста три разных состояния: Hi — выход полумоста подключен к питанию (верхний полевик открыт, нижний — закрыт), Lo — выход полумоста подключен к общему проводу (верхний полевик закрыт, нижний — открыт) и Z — выход полумоста отключен и от питания, и общего провода (оба полевика закрыты).
В принципе, можно получить ещё и четвёртое состояние — когда оба полевика открыты, но в этом случае получится КЗ и один из полевиков просто сгорит. Поэтому такое состояние мы будем считать запрещённым и с ним нам как раз придётся всеми способами бороться.
В схеме предусмотрено отдельное питание для схемы управления (+5В) и для силовой части (+12В), поэтому для верхнего плеча пришлось делать развязку на транзисторах T1, T2. Два транзистора были использованы для того, чтобы умощнить эту развязку и сделать её характеристику симметричной, чтобы она могла не только быстро заряжать, но и разряжать затвор верхнего полевика (то есть это ещё и драйвер).
Два транзистора были использованы для того, чтобы умощнить эту развязку и сделать её характеристику симметричной, чтобы она могла не только быстро заряжать, но и разряжать затвор верхнего полевика (то есть это ещё и драйвер).
Нижний полевик управляется без всякого драйвера, напрямую от ноги микроконтроллера.
Резисторы R7, R8 — это необязательные подтяжки, назначение которых — предотвратить самопроизвольные открытия полевиков в тот момент, когда ноги микроконтроллера ещё не настроены на выход и находятся в Z-состоянии (при старте). Соответственно, номиналы этих резисторов не очень важны, они просто должны быть намного больше номиналов резисторов R5 и R6, чтобы не мешать нормальной работе схемы после запуска контроллера. Более того, поскольку нам главное, чтобы полевики оба сразу не открылись (если один откроется — шут с ним), можно оставить только R8. Я так и сделал, — взял номинал резистора R8 равным 10 кОм, а резистор R7 вообще выкинул.
Стоит отметить, что помимо функции подтяжки, R7 может выполнять ещё и функцию борьбы с наводками на линию управления транзистором T2.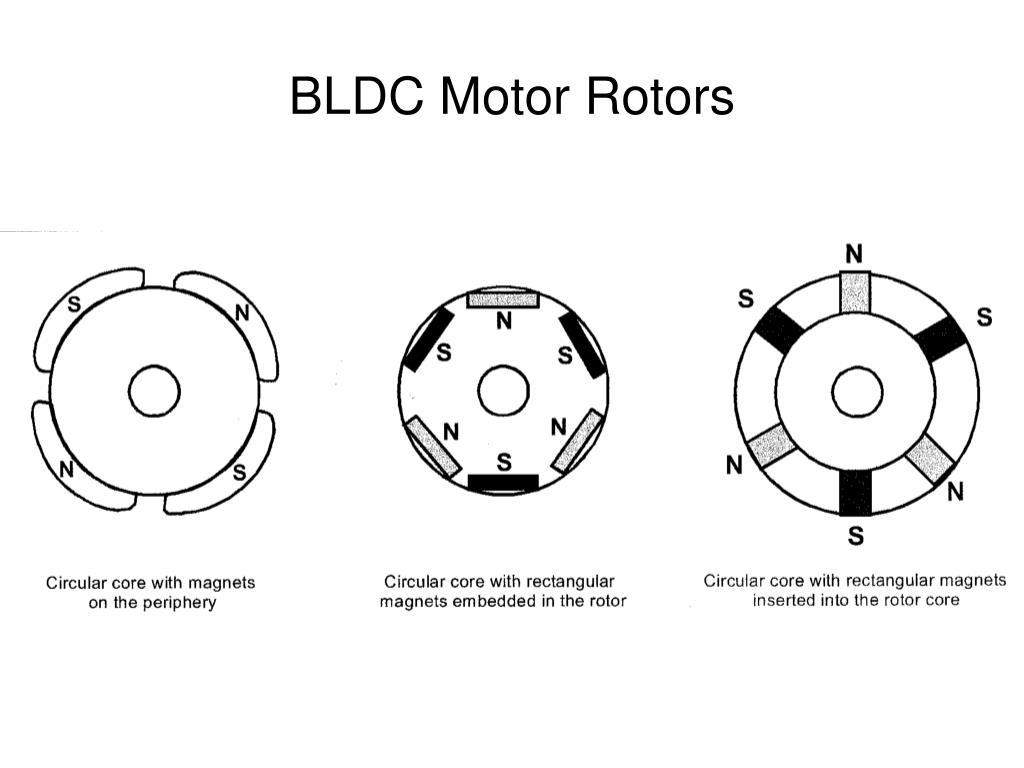 Ток в этой линии очевидно будет гораздо меньше, чем через R5 и в случае, если такие наводки всё же будут, резистор R7 придётся вернуть (это если вы свою разводку платы будете делать).
Ток в этой линии очевидно будет гораздо меньше, чем через R5 и в случае, если такие наводки всё же будут, резистор R7 придётся вернуть (это если вы свою разводку платы будете делать).
Ну что, дальше давайте считать. Исходить будем из двух предпосылок: 1) полевиками нужно рулить максимально быстро, но без фанатизма; 2) высшая математика — удовольствие на любителя (особенно когда есть осциллограф и можно всё проверить на практике). В связи с этими, особой точностью и правильностью я увлекаться не буду, но, по крайней мере, рассчёты позволят на что-то ориентироваться.
Начнём с нижнего полевика (N-канальник). Для максимально быстрого управления этим полевиком нам нужно выжать с ноги микроконтроллера максимальный ток и в то же время эту ногу не поджарить.
Пиковый ток на ногу в документации на ATtiny2313 не указан, поэтому будем исходить из значений, указанных в Absolute maximum ratings — 40 мА. При этом максимальный ток у нас будет протекать в самом начале заряда, когда разность потенциалов на затворе и ножке микроконтроллера максимальна. Таким образом, получается R5=5В/40мА=125 Ом. Ближайшее большее значение стандартного номинала — 150 Ом, но мы возьмём 200 Ом, чтобы был небольшой запас. Максимальный ток при этом получится 5/200=25 мА.
Таким образом, получается R5=5В/40мА=125 Ом. Ближайшее большее значение стандартного номинала — 150 Ом, но мы возьмём 200 Ом, чтобы был небольшой запас. Максимальный ток при этом получится 5/200=25 мА.
Теперь давайте оценим время переключения нашего полевика с резистором 200 Ом в затворе. Оценить это время можно по формуле t=Qg/I, где Qg — total gate charge (берём из документации на FDS4542), I — ток драйвера (мы возьмём максимальный расчётный зарядный ток, чтобы точно не ошибиться в меньшую сторону). Получаем t=28 нК / 25 мА = 1,12 мкс.
Зачем нам нужно время переключения? Очень просто. Когда мы будем писать программу управления — мы должны будем учитывать, что полевики закрываются не мгновенно и вводить задержки между закрытием полевика в одном плече и открытием полевика в другом плече, во избежание возникновения сквозных токов (когда полевики в обоих плечах приоткрыты).
Переходим к P-канальному полевику. Тут ситуация попроще и ногу контроллера нам нагружать не нужно, зато нужно не спалить биполярные транзисторы и диод.
Резисторы R1 и R3 в обвязке p-канальника — это просто высокоомные подтяжки и их номиналы не должны нас особо сильно волновать, поэтому я для начала взял их по 10 кОм (чтобы токи через них можно было не учитывать) и про них забыл.
Затворные токи здесь определяются резисторами R2 и R4, а сама обвязка работает следующим образом: при открытии транзистора T2 потенциал базы транзистора T1 падает ниже потенциала его эмиттера, T1 закрывается, а затвор полевика разряжается через диод и резистор R4; при закрытии транзистора T2 потенциал базы транзистора T1 растёт быстрее, чем на его эмиттере, что приводит к открытию T1 и резкому заряду затвора через R2.
Сначала разберёмся с зарядом. По документации ток через FMMT2222 может быть до 600 мА, а для LL4148 — до 450 мА импульсный и до 150 постоянный, поэтому ориентироваться будем на диод и возьмём для расчётов, скажем 150 мА (чтобы ничего сильно не грелось). Исходя из этого, получим сопротивление резистора R4 = (12-0,5)В/150мА = 76,6 Ом. Далее аналогично, — возьмём ближайший стандартный номинал больше расчётного — 100 Ом. Пересчитываем обратно в ток, получаем I = 115 мА. Ну что ж, пусть будет так. При этом время заряда можно оценить на уровне t = 36 нК / 115 мА = 313 нс.
Далее аналогично, — возьмём ближайший стандартный номинал больше расчётного — 100 Ом. Пересчитываем обратно в ток, получаем I = 115 мА. Ну что ж, пусть будет так. При этом время заряда можно оценить на уровне t = 36 нК / 115 мА = 313 нс.
Чтобы сильно не заморачиваться, возьмём R2 такого же номинала, как и R4, и будем считать, что время закрытия будет примерно такое же, как и время открытия.
Теперь проверим, насколько правильно мы выбрали R1. Чтобы транзистор T1 нормально открывался, ток базы должен быть не более чем в h31 раз меньше тока коллектора. Ток коллектора у нас 100 мА, h31 (из доки) не менее 35, значит ток базы нам нужен не менее 2,86 мА. А он у нас получается 12В/10кОм = 1,2 мА. Ну, тогда возьмём R1 = 3,3 кОм. В этом случае ток базы = 12/3,3 = 3,6 мА. Так и оставим.
Тот же расчёт проделаем для транзистора T2. Ток коллектора у него такой же, как и у T1, значит ток базы тоже должен быть не менее 2,86 мА. Значит R6 должен иметь номинал менее 5/2,86=1,75 кОм. Возьмём с запасом резистор на 1 кОм.
В итоге получилось: R1=3,3 кОм, R2=R4=100 Ом, R3=10 кОм, R5=200 Ом, R6=1 кОм, R7 мы выкинули, R8=10 кОм. При этом время переключения нижнего полевика мы ожидаем на уровне 1,12 мкс, а верхнего — на уровне 313 нс.
Что у нас осталось? Во-первых, конденсаторы. С1=С2=20 пФ, С3=100 мкФ, С4=0,1 мкФ. При проектировании платы C3,C4 нужно расположить как можно ближе к силовым ногам ключей. Во-вторых, на схеме не полностью показана обвязка микроконтроллера. Нужно подтянуть ногу MCLR к питанию через резистор 1 — 10 кОм, а так же поставить конденсатор 0,1 мкФ между питанием и общим проводом поближе к ножкам контроллера.
Что ж, — собираем и тестим.
Скачать плату в формате DipTrace 2.3
Готовый девайс:
Для снятия осциллограмм была написана тестовая программа, в которой транзисторы специально переключались с интервалами гораздо больше расчётных (на случай, если расчёты окажутся слишком кривыми).
Осциллограммы:
Как видите, наши рассчёты дали примерно адекватные результаты, по крайней мере корректировать ничего не нужно.
Простейшая программка для контроллера (пуск / стоп / реверс / изменение питающего напряжения и частоты вращения)
Небольшое видео, демонстрирующее работу устройства
Универсальный драйвер щёточного мотора и BLDC
Представляем обзор схемы и платы драйвера двигателя BLDC, оснащенной интеллектуальным полумостом IFX007T. Модуль способен управлять одним двигателем BLDC. В качестве альтернативы его можно использовать для управления одним или двумя двунаправленными двигателями постоянного тока (конфигурация H-моста, каскадная для поддержки второго двигателя) или до трех однонаправленных двигателей постоянного тока (полумостовая конфигурация).
Схема драйвера мотора на IFX007T
Интегрированные полумосты IFX007T могут управляться ШИМ через контакт IN. Взаимодействие с микроконтроллером или Arduino упрощается благодаря встроенной микросхеме драйвера, которая имеет входы логического уровня, диагностику с измерением тока, регулировку скорости нарастания, генерацию мертвого времени и другие функции.
IFX007T полностью защищены от перегрева, пониженного напряжения, перегрузки по току и короткого замыкания. Проект способен на высокочастотный ШИМ – до 30 кГц. Все входы имеют логический уровень, выходы измерения тока предназначены для целей диагностики, а скорость нарастания регулируется с помощью R7, R8, R9, что можно использовать для быстрого и недорогого прототипирования (BL) управления двигателем постоянного тока, простого тестирования полумостового и полномостового управления двигателем. Для контроля температуры микросхемы IFX007 рекомендуется использовать принудительный обдув.
Код Ардуино к драйверу BLDC
Прилагающийся код Arduino предназначен для тестирования платы. Пользователь сможет управлять одним щеточным двигателем постоянного тока с функцией регулировки скорости. Скачать тут: github.com/Infineon/IFX007T-Motor-Control
Соединения: цифровой контакт Arduino D5 = контакт 5 VH разъема CN5, цифровой контакт Arduino D10 = контакт 4 VI разъема CN5, GND Arduino = контакт 8 заземления CN5, питание двигателя от 8 до 40 В постоянного тока = CN1.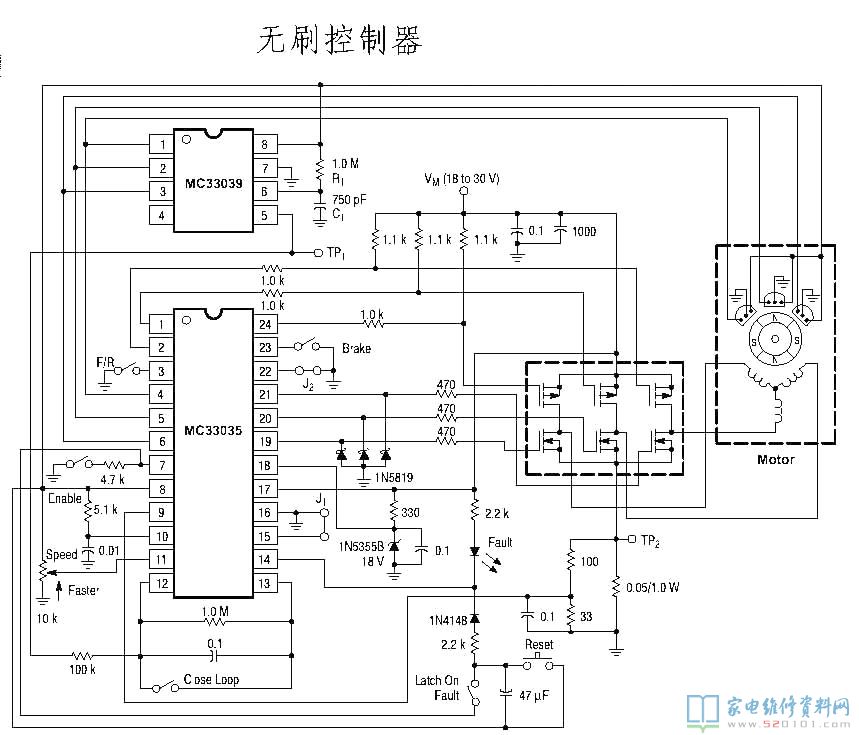
Подключается щеточный или BLDC двигатель
Один двигатель BLDC с датчиком Холла или FOC. Три однонаправленных щеточных двигателя постоянного тока. Один двунаправленный и один однонаправленный.
Данная плата поддерживает двигатель BLDC на основе датчика Холла. Используйте следующие дополнительные компоненты R19, R20, R21, R22, R23, R24, C14, C15, C16 для привода двигателя без датчика на основе FOC. Цепь резисторов делителя R28, R29 и C17 предназначена для контроля напряжения питания мотора.
Технические параметры контроллера
- Подключается щеточный и бесщеточный двигатель постоянного тока с непрерывной нагрузкой до 300 Вт.
- Номинальное входное напряжение 8–40 В (оптимизировано для 24 В).
- Средний ток двигателя 30 А ограничен из-за печатной платы (сама IFX007T может 55 А).
- Размеры печатной платы 81 x 45 мм
Модуль может использоваться для привода двигателей в различных промышленных устройствах: электроинструменты, медицина, роботы, насосы, мультикоптеры, пылесосы, индустриальная автоматизация.
Описание чипа IFX007T
IFX007T представляет собой интегрированный сильноточный полумост для электроприводов. Он является частью семейства Industrial & Multi-Purpose NovalithIC, содержащего один p-канальный полевой МОП-транзистор верхнего плеча и один n-канальный полевой МОП-транзистор нижнего плеча со встроенной микросхемой драйвера в одном корпусе.
Благодаря p-канальному переключателю верхнего плеча отпадает необходимость в зарядовом насосе, что сводит к минимуму электромагнитные помехи.
Взаимодействие с микроконтроллером упрощается благодаря встроенной микросхеме драйвера, которая имеет входы логического уровня, диагностику с измерением тока, регулировку скорости нарастания, генерацию мертвого времени и защиту от перегрева, пониженного напряжения, перегрузки по току и короткого замыкания. IFX007T представляет собой оптимизированное по стоимости решение для защищенных сильноточных приводов двигателей с ШИМ.
Устройство имеет встроенные функции защиты выходов короткого замыкание на землюв. Управляющие входы IN и INH состоят из совместимых с TTL/CMOS триггеров Шмитта с гистерезисом, которые управляют встроенными драйверами затворов для полевых МОП-транзисторов. Установка высокого уровня на выводе INH включает устройство. В этом состоянии один из двух переключателей питания включается в зависимости от состояния контакта IN. Чтобы деактивировать оба переключателя, вывод INH должен быть установлен в низкий уровень. Внешний драйвер не требуется. IFX007T может быть напрямую подключен к микроконтроллеру.
Управляющие входы IN и INH состоят из совместимых с TTL/CMOS триггеров Шмитта с гистерезисом, которые управляют встроенными драйверами затворов для полевых МОП-транзисторов. Установка высокого уровня на выводе INH включает устройство. В этом состоянии один из двух переключателей питания включается в зависимости от состояния контакта IN. Чтобы деактивировать оба переключателя, вывод INH должен быть установлен в низкий уровень. Внешний драйвер не требуется. IFX007T может быть напрямую подключен к микроконтроллеру.
В мостовых включениях необходимо гарантировать, что полевой МОП-транзистор верхнего и нижнего плеча не проводит ток одновременно, напрямую подключая напряжение батареи к GND. Это обеспечивается схемой в микросхеме драйвера, создающей так называемое мертвое время между выключением одного полевого МОП-транзистора и включением другого. Время, генерируемое микросхемой драйвера, автоматически настраивается на выбранную скорость нарастания (регулируется с помощью внешнего резистора R7, R8, R9).
Вывод скорости нарастания SR позволяет пользователю оптимизировать баланс между излучением и рассеиваемой мощностью в рамках собственного устройства путем подключения внешнего резистора RSR к GND.
Контакт IS используется в качестве комбинированного выхода текущего датчика и флага ошибки. При нормальной работе (режим измерения тока) источник тока подключается к контакту состояния, который обеспечивает ток, пропорциональный прямому току нагрузки, протекающему через активный переключатель верхнего плеча.
(BLDC) Схема драйвера бесщеточного двигателя постоянного тока с использованием 555 IC
555 Timer ProjectsElectronics Circuits
AdminПоследнее обновление: 14 октября 2022 г.
0 2 минуты чтения
Содержание
Обзор: Схема драйвера бесщеточного двигателя постоянного тока с использованием 555 IC
В этом проекте мы создадим BLDC, схему драйвера бесщеточного двигателя постоянного тока с использованием 555 Timer IC и 9001 2 Драйвер DRV10866 IC . Бесщеточные двигатели находят применение в компьютерной периферии, такой как дисководы, принтеры, ручные электроинструменты, самолеты, автомобили и т. д.0012 дроны .
Бесщеточные двигатели находят применение в компьютерной периферии, такой как дисководы, принтеры, ручные электроинструменты, самолеты, автомобили и т. д.0012 дроны .
Для управления BLDC обычно требуется информация о положении ротора для выбора соответствующего угла коммутации . Итак, для этого мы используем Driver Circuit . В большинстве приложений используются датчики Холла , но здесь мы будем использовать схему на основе микросхемы таймера 555 и драйвера DRV10866 IC .
Спецификация
Ниже перечислены компоненты, необходимые для выполнения этого проекта. Все компоненты можно легко купить на Amazon.
| С.Н. | Компоненты | Описание | Количество |
|---|---|---|---|
| 1 | Резистор | 10 кОм | 1 |
| 2 | Резистор | 100 кОм | 1 |
| 3 | Резистор | 3,8 кОм | 1 |
| 4 | Переменный резистор | 5 кОм | 1 |
| 5 | Конденсатор | 10 нФ (керамический диск) | 2 |
| 6 | Конденсатор | 0,1 мкФ (керамический диск) | 1 |
| 7 | Конденсатор | 2,2 мкФ (керамический диск) | 1 |
| 8 | NE555 | 555 Таймер IC | 1 |
| 9 | BAT41 | Диод Шоттки | 2 |
| 10 | DRV10866 | DRV10866, 3-фазный привод двигателя постоянного тока | 1 |
| 11 | Блок питания 5 В | Батарея/адаптер постоянного тока | 1 |
Бесщеточный электродвигатель постоянного тока
A Бесщеточный электродвигатель постоянного тока (двигатель постоянного тока или двигатель BL) представляет собой синхронный двигатель, питаемый от постоянного тока (постоянного тока) от электричества через инвертор или импульсная мощность поставка , которая производит электричество в виде переменный ток (AC) для управления каждой фазой двигателя через контроллер с обратной связью .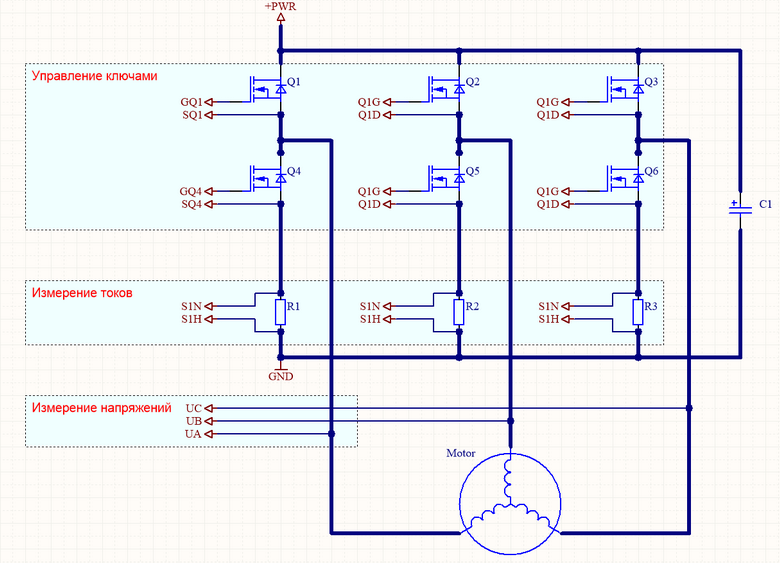 Контроллер подает импульсы тока на обмотки двигателя, которые управляют скоростью и крутящим моментом двигателя.
Контроллер подает импульсы тока на обмотки двигателя, которые управляют скоростью и крутящим моментом двигателя.
Преимуществами бесщеточного двигателя по сравнению с щеточными двигателями являются высокая удельная мощность, высокая скорость, электронное управление и низкие эксплуатационные расходы.
DRV10866 Драйвер IC
DRV10866 — трехфазный бездатчиковый драйвер двигателя со встроенным силовым МОП-транзистором с допустимым током управления до 680 мА пик . DRV10866 специально разработан для малошумных приводов вентиляторов с малым количеством внешних компонентов . DRV10866 имеет встроенную защиту от перегрузки по току без необходимости использования внешнего токоизмерительного резистора.
Работает в диапазоне входного напряжения от 1,65 до 5,5 В . Он имеет очень продвинутые функции, такие как обнаружение блокировки , защита от перенапряжения, UVLO, тепловое отключение и т. д. Драйвер IC & DRV10866 приведен ниже.
Он имеет очень продвинутые функции, такие как обнаружение блокировки , защита от перенапряжения, UVLO, тепловое отключение и т. д. Драйвер IC & DRV10866 приведен ниже.
Подтягивающий резистор 100k r используется на контакте 1 DRV10866. Затем мы подключаем контакты 2, 4, 7 и 6 DRV10866 к общей фазе A, фазе B и фазе C двигателя BLDC. Контакт 10 DRV10866 подключен к контакту 7 микросхемы таймера 555, чтобы получить p 9.0012 сигнал с широтно-импульсной модуляцией (ШИМ) сигнал от DRV10866. Это управляет скоростью двигателя BLDC.
Выходной сигнал (ШИМ) подается на контакт 7 микросхемы таймера 555. Чтобы отрегулировать сигнала ШИМ 25 кГц, вы можете отрегулировать рабочий цикл с помощью потенциометра 5K. Рабочий цикл может варьироваться от 5% до 95%, который контролирует скорость двигателя BLDC.
Похожие статьи
Сильноточный бессенсорный контроллер двигателя постоянного тока с обратной ЭДС
You are here: Home / Контроллер двигателя / Сильноточный бессенсорный контроллер двигателя BLDC с использованием обратной ЭДС
Искать на этом веб-сайте Бездатчиковая схема контроллера двигателя BLDC, которая не зависит от датчиков Холла для запуска операций, а использует противо-ЭДС двигателя для последовательного ввода
Обзор
обратной связи или от внешнего 3-фазного синхросигнала, в отличие от этого, наша нынешняя бездатчиковая схема контроллера двигателя BLDC высокой мощности не зависит от датчиков или каких-либо внешних сигналов для работы двигателя.
Вместо этого схема очень просто обрабатывает обратные ЭДС от обмотки двигателя для создания необходимого мощного синхронизированного вращательного воздействия на двигатель.
Возвращаясь к нашей нынешней концепции, схема использует IC ML4425 от Fairchild и позволяет нам управлять любым типом двигателя BLDC независимо от того, есть ли у двигателя датчики или нет.
Большинство современных двигателей BLDC имеют встроенные датчики Холла, которые обеспечивают необходимую обратную связь со схемой контроллера относительно мгновенного положения магнитного ротора по отношению к обмотке статора и информируют контроллер, когда необходимо запустить соответствующие силовые устройства с помощью точной последовательности, что, в свою очередь, позволяет двигателю вращаться с идеальной синхронизацией и максимальной эффективностью.
Работа без датчиков
Некоторые двигатели BLDC могут быть без датчиков, и для таких двигателей контроллер BLDC вынужден использовать схему внешнего трехфазного генератора для требуемого синхронизированного вращения двигателя.
Однако существующий трехфазный бессенсорный контроллер BLDC устраняет все эти проблемы и не зависит ни от датчиков, ни от какой-либо формы внешнего запуска, вместо этого система извлекает импульсы противо-ЭДС от катушки статора двигателя BLDC для создания вращательного момента на подключенный мотор.
Эта функция позволяет универсально использовать контроллер для всех типов бесщеточных двигателей постоянного тока без сложностей, связанных с подключением датчиков или внешними каскадами трехфазного генератора.
Более того, поскольку силовые устройства полной мостовой схемы конфигурируются снаружи, это позволяет использовать систему даже с двигателями постоянного тока большой мощности без каких-либо ограничений. Можно просто изменить номинал силовых устройств в соответствии с требованиями и добиться предполагаемой работы с большим током BLDC в соответствии с предпочтениями.
На следующей диаграмме показана полная схема предлагаемого бессенсорного контроллера BLDC, использующего противо-ЭДС в качестве источника запуска.
Описание схемы
Предоставлено с веб-сайта Mouser.com
Система выглядит довольно просто, вам просто нужно припаять показанные компоненты на место и быстро запустить операции BLDC. Это так же просто, как включить питание и увидеть, как двигатель BLDC вращается с полной эффективностью.
Элементы управления также очень просты для понимания и реализации, переключатель RUN/BRAKE позволяет двигателю продолжать работу, пока переключатель находится в положении OFF или не заземлен, в то время как двигатель мгновенно останавливается, как только переключатель переключается на уровне земли.
POT R18 позволяет пользователю линейно управлять скоростью двигателя, просто перемещая ручку потенциометра в указанном диапазоне.
Основное преимущество
Самым большим преимуществом этого 3-фазного бессенсорного контроллера постоянного тока является то, что он не требует беспорядочной обратной связи на основе датчика от двигателя, а также не зависит от 3-фазного синхросигнала от внешнего источника.