Содержание
Шаговый сервопривод (серводвигатель) и его преимущества
Тезисы:
• Правильное управление током двигателя (с пом. управления ориентацией поля) в шаговых приводах с обратной связью могут устранить проблемы среднечастотного резонанса, увеличить момент и снизить шум от двигателя
• Качественные шаговые гибридные сервоприводы не уступают сервоприводам на базе вентильных электродвигателей на низких скоростях вращения.
Шаговые двигатели
Шаговые двигатели — прекрасно известный способ превратить электрическую энергию в точные -механические перемещения. Каждый импульс, посылаемый на драйвер двигателя, двигает ротор в точном соответствии с заданными на драйвере настройками. Например, 100 посланных импульсов на полношаговый привод с двигателем с шагом 1.8° будут преобразованы в поворот ровно на 180°. Одной из сильных сторон шаговых двигателей является то, что они способны работать без обратной связи, без коррекции положения с помощью энкодеров или иных датчиков, т. к. вал по самой архитектуре шагового двигателя совершает перемещения строго в соответствии с поданными импульсами. Однако, это прекрасно работает лишь в том случае, если шаговые двигатели никогда не перегружаются и не впадают в резонанс. В реальности же в очень редких случаях когда отсутствуют эти два фактора. Для того, чтобы быть уверенным, что шаговый мотор не будет пропускать шаги, большинство разработчиков поступают просто — закладывают большой запас при выборе мощности двигателя. Это означает, что на станок будет установлена значительно более тяжелая и дорогая модель, чем это действительно требуется. Резонанс же часто проявляется на тех же самых, рабочих частотах вращения, которые являются основными в конкретном приложении, и поэтому избежать его становится еще сложней.
к. вал по самой архитектуре шагового двигателя совершает перемещения строго в соответствии с поданными импульсами. Однако, это прекрасно работает лишь в том случае, если шаговые двигатели никогда не перегружаются и не впадают в резонанс. В реальности же в очень редких случаях когда отсутствуют эти два фактора. Для того, чтобы быть уверенным, что шаговый мотор не будет пропускать шаги, большинство разработчиков поступают просто — закладывают большой запас при выборе мощности двигателя. Это означает, что на станок будет установлена значительно более тяжелая и дорогая модель, чем это действительно требуется. Резонанс же часто проявляется на тех же самых, рабочих частотах вращения, которые являются основными в конкретном приложении, и поэтому избежать его становится еще сложней.
Как одно из средств избежать последствий кратковременных перегрузок шагового двигателя и пропуска шагов — это установить энкодер на двигатель мотора, точь-в-точь как ставится аналогичный датчик на вал вентильного серводвигателя. Энкодер представляет информацию о положении ротора контроллеру, который сравнивает её с заданной координатой, и использует полученное рассогласование для выполнения шагов таким образом, чтобы скомпенсировать разницу. К сожалению, данный способ не помогает устранить последствия резонанса. Однако, возможность такая все же есть, и заключается она в комбинации коррекции по положению(т.е. компенсации числа импульсов STEP) и одновременного управления ориентацией поля статора шагового двигателя, по принципу аналогичному векторному управлению трехфазными электродвигателями. Поскольку энкодер дает сведения о положении вала, существует возможность ориентировать магнитное поле статора шагового мотора таким образом, чтобы получить максимально эффективное потокозацепление. Причем такая схема не потребует преобразований Кларка, каковые обычно используются для проекции трехфазной системы токов в двухфазную, т.к. шаговые биполярные моторы изначально имеют только 2 обмотки. При таком способе управления ток меняется в обмотках синусоидально — вне зависимости от того, используется полный шаг или микрошаг.
Энкодер представляет информацию о положении ротора контроллеру, который сравнивает её с заданной координатой, и использует полученное рассогласование для выполнения шагов таким образом, чтобы скомпенсировать разницу. К сожалению, данный способ не помогает устранить последствия резонанса. Однако, возможность такая все же есть, и заключается она в комбинации коррекции по положению(т.е. компенсации числа импульсов STEP) и одновременного управления ориентацией поля статора шагового двигателя, по принципу аналогичному векторному управлению трехфазными электродвигателями. Поскольку энкодер дает сведения о положении вала, существует возможность ориентировать магнитное поле статора шагового мотора таким образом, чтобы получить максимально эффективное потокозацепление. Причем такая схема не потребует преобразований Кларка, каковые обычно используются для проекции трехфазной системы токов в двухфазную, т.к. шаговые биполярные моторы изначально имеют только 2 обмотки. При таком способе управления ток меняется в обмотках синусоидально — вне зависимости от того, используется полный шаг или микрошаг.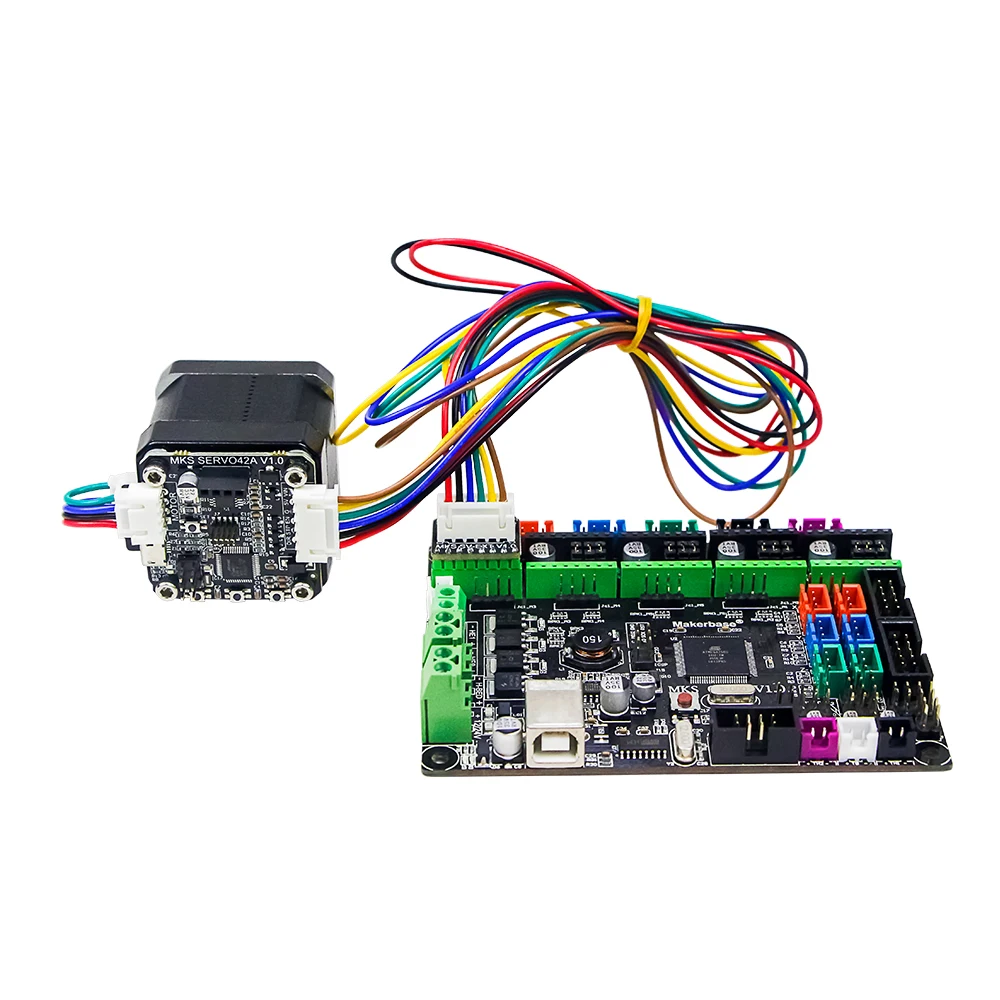 Еще одним преимуществом управления ориентацией поля является то, что такой шаговый привод будет нечувствителен к резким изменениям нагрузки — векторное управление позволяет отрегулировать момент привода «на лету» — функция, обычно доступная только при использовании сервоприводов типа PMSM.
Еще одним преимуществом управления ориентацией поля является то, что такой шаговый привод будет нечувствителен к резким изменениям нагрузки — векторное управление позволяет отрегулировать момент привода «на лету» — функция, обычно доступная только при использовании сервоприводов типа PMSM.
Теперь о сервоприводах…
Читатели, возможно, в курсе, что уже достаточно долгое время существуют шаговые сервоприводы, которые используют обратную связь по позиции. Такие приводы просто считают количество шагов и добавляют(или вычитают) шаги для компенсации ошибки, и не способны корректировать угол поворота вала внутри одного шага, «на лету».
В противоположность, синусоидальная коммутация в паре с управлением ориентацией поля действительно способна компенсировать ошибки позиционирования вала внутри одного шага, возникающие из-за неидеальной геометрии деталей шаговых двигателей или нагрузки. Векторное управление магнитным полем гарантирует, что поле статора всегда перпендикулярно полю ротора, и насыщенность поля точно соответствует требуемому моменту. Это увеличивает, эффективность и динамику, и снижает флуктуации крутящего момента. Такой вид управления позволяет шаговым двигателям конкурировать с вентильными сервоприводами на скоростях до 2000 об/мин. На более высоких серводвигатели все же будут эффективней. Оптимальным диапазоном является скорость вращения до 1000 об/мин — в нем шаговые двигатели развивают больший крутящий момент, чем вентильные серводвигатели того же размера.
Это увеличивает, эффективность и динамику, и снижает флуктуации крутящего момента. Такой вид управления позволяет шаговым двигателям конкурировать с вентильными сервоприводами на скоростях до 2000 об/мин. На более высоких серводвигатели все же будут эффективней. Оптимальным диапазоном является скорость вращения до 1000 об/мин — в нем шаговые двигатели развивают больший крутящий момент, чем вентильные серводвигатели того же размера.
Приложения, в которых шаговые сервоприводы c синусоидальными токами обмоток могут заменить серводвигатели, включают в себя:
- намоточное оборудование,
- транспортные ленты конвейеров,
- управление заслонками насосов
а также многие другие — все те, в каких нагрузка может изменяться скачкообразно. Кроме того, при использовании таких приводов во многих случаях можно обойтись без редуктора, что делает их привлекательными в случаях, когда критичны габариты механизма. И наконец, следует отметить, что сервоприводы с векторным управлением потребляют ровно столько тока, сколько требуется — меньше нагрев, выше КПД привода. Все этим преимущества становятся очевидными, если рассмотреть привод механизма с ременной передачей, которые обычно работают от асинхронного электродвигателя. Хорошим решением будет заменить асинхронный мотор на подходящий по мощности шаговый сервопривод — как правило, таковой будет примерно втрое меньше по габаритам и весу.
Все этим преимущества становятся очевидными, если рассмотреть привод механизма с ременной передачей, которые обычно работают от асинхронного электродвигателя. Хорошим решением будет заменить асинхронный мотор на подходящий по мощности шаговый сервопривод — как правило, таковой будет примерно втрое меньше по габаритам и весу.
Автор: Darxton.ru.
Шаговые сервоприводы
— шаговые сервоприводы Oriental Motor (Япония)
— шаговые сервоприводы Leadshine (Китай)
— шаговые сервоприводы Kinco (Китай)
Высокоточные шаговые сервоприводы Oriental Motor (Япония)
Новинка! Шаговые двигатели серии AZ с угловым редуктором
Загрузить каталог серии AZ с угловым редуктором
Коэфф. передачи редуктора: 5, 10, 20, 40
Люфт редуктора: от 13 до 18 угл. минут
Напряжение питания: DC 24/48 В, AC 220 В
Форм-факторы двигателей: 60-85 мм
Крутящий момент: до 192 Н*м
Разрешение абсолютного энкодера: 262144 об/мин.
Опционально: электромагнитный тормоз
Новинка! Приводы шаговых двигателей с абсолютным энкодером серии AZ и цифровыми интерфейсами (EtherCAT, EtherNet/IP, PROFINET)
Загрузить каталог серии AZ с абсолютным энкодером
Брошюра серии AZ с цифровыми интерфейсами
Разрешение абсолютного энкодера: 262144 об/мин.
Диапазон измерений: +/-900 оборотов
Опционально: комплектация двигателя редуктором,
драйвер со встроенным контроллером
Напряжение питания: DC 24/48 В, AC 220 В
Форм-факторы двигателей: 20-90мм
Крутящий момент: до 4 Н*м без редуктора, до 107Н*м с редуктором
шаговые сервоприводы AR фирмы Oriental Motor (Япония)
Каталог сервоприводов серии AR AC (напряжение питания 220В)
Каталог сервоприводов серии AR ВС (напряжение питания 24-48В)
Привод серии AR — это шаговый двигатель с датчиком положения ротора и драйвер широким набором функций. Датчик положения ротора позволяет получить все преимущества управления с обратной связью: предотвращение потери шагов, отсутствие вибрации в режиме удержания, быстрый отклик на управляющий сигнал и др.
- Пониженное энергопотребление(66% ниже по сравнению с обычными ШД)
- Меньший нагрев мотора при работе (крутящий момент сохраняется)
- Вибрация двигателя при работе значительно снизилась
- Добавлена функция возврата в положение HOME(несколько алгоритмов)
- Контроль параметров привода при отключении силового источника питания (источник 24В. включен)
- Регулируемое давление штока при использовании привода для давления(придавливания)
- Интегрированный контроллер.
- Установка параметров может осуществляться с панели оператора или компьютера. По интерфейсу RS485 (протокол MODBUS)
Сервоприводы на базе шагового двигателя серии AR комплектуются следующими типами редукторов: цилиндрическими, планетарными, волновыми а также электромагнитным тормозом. Приводы AR AC: напряжение питания 220 В. 50 Гц., 24В VDC питание логическоя части, шаг 0.0036-0.72°, момент 0.3-110 Н*м. Приводы AR DC: напряжение питания 24-48 В. VDC, 24В VDC питание логическоя части, шаг 0.0036-0.72°, момент 0.3-40 Н*м.
VDC, 24В VDC питание логическоя части, шаг 0.0036-0.72°, момент 0.3-40 Н*м.
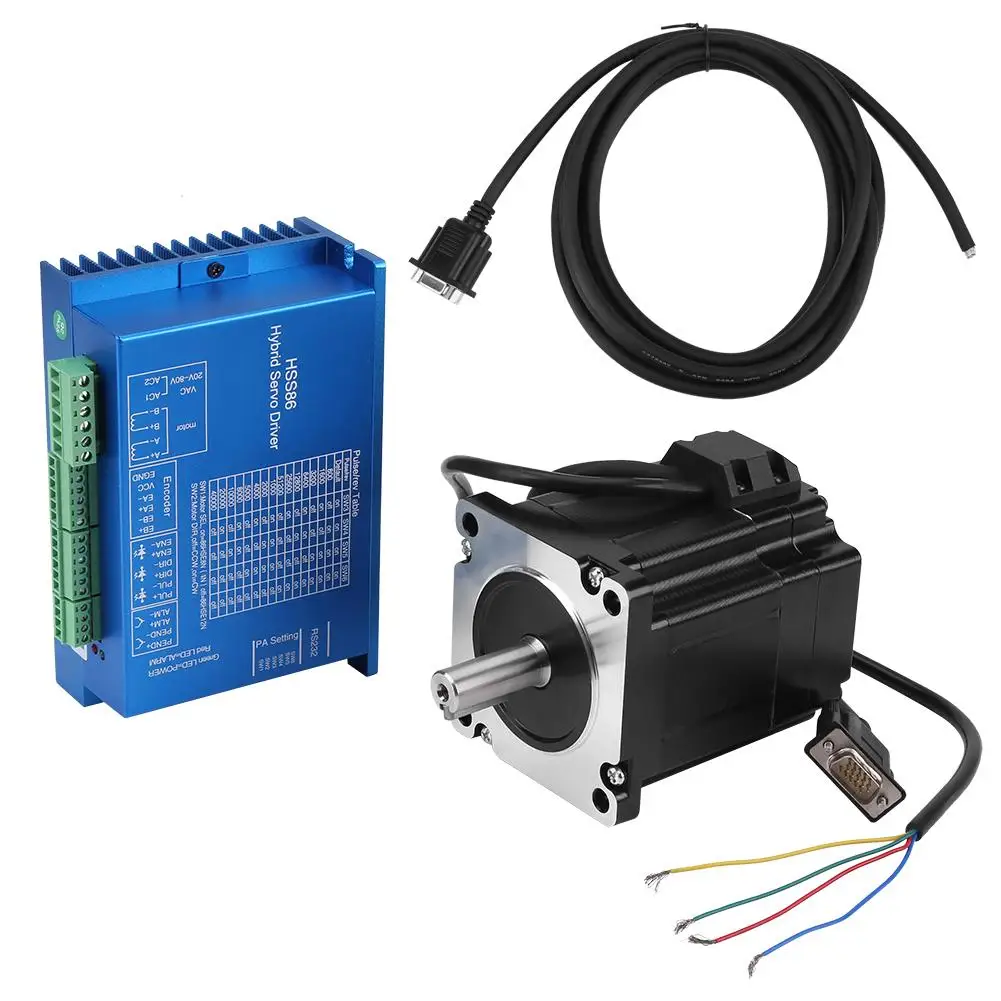
БЮДЖЕТНЫЕ ШАГОВЫЕ СЕРВОПРИВОДЫ фирмы LEADSHINE (Китай)
НОВИНКА! Шаговые сервоприводы линейки Close-loop Stepper (CS)
Новая серия драйверов Leadshine означает драйверы с обратной связью (close loop). Серия предлагает более экономичную альтернативу сервоприводам, использующимся в системах, требующих повышенную производительность и более высокую надёжность, чем могут обеспечивать системы без обратной связи. Драйверы серии CS-D предназначены для управления шаговыми двигателями типоразмеров NEMA8/11/14/17/23/24/34 (фланец 20,25,36,47,57,60,86 мм), оборудованными встроенным энкодером, который используется для контроля в контурах управления положением, скоростью и током.
- Обратная связь по скорости, позиции и току.
- Повышенный крутящий момент на высоких частотах.
- Малый нагрев двигателя.
- Малая вибрация двигателя.
- Автоматическая настройка в зависимости от нагрузки.

- Крутящий момент 0.2-12 Н*м (в зависимости от двигателя).
- Ток 0.5-8 А.
- Напряжение питания 20-110 В постоянный ток (в зависимости от драйвера)

СЕТЕВЫЕ ШАГОВЫЕ СЕРВОПРИВОДЫ
НОВИНКА! Серия шаговых сервоприводов CS2RS (Modbus)
скачать описание драйверов CS2RS
скачать программу Leadshine Motion Studio
Серия драйверов шаговых двигателей с обратной связью CS2RS характеризуется возможностью работы по протоколу Modbus RTU (интерфейс RS485). Поддерживает работу до 31 устройств на одной информационной шине. В драйвере можно сохранять до 16 программ позиций перемещения, и запускать работу этих программ (режим PR — перемещение по заданным координатам) без дополнительного контроллера, что значительно упрощает систему управления и снижает стоимость устройства. Драйвера CS2RS также поддерживают функцию обучения, контроль за положением, скоростью и поиск нулевой точки. Драйверы серии CS2RS предназначены для управления шаговыми двигателями типоразмеров NEMA8/11/14/17/23/24 (фланец 20,25,36,47,57,60 мм), оборудованными встроенным энкодером с разрешением от 1000 до 5000 имп/об.
- поддерживают коммуникационный протокол Modbus RTU
- управление от панели, ПЛК или внешних кнопок
- 7 программируемых входов и 3 программируемых выхода
- напряжение питания 20-50 В
- выходной ток от 0,5 до 7 А
- выходной момент подключаемых двигателей от 0,2 до 3 Нм
НОВИНКА! Серия шаговых сервоприводов CS3E (EtherCAT)
скачать инструкцию по эксплуатации драйверов CS3E (EtherCAT)
скачать программу ProTuner для серии CS3E
Серия CS3E — это драйвера шаговых двигателей с обратной связью, которые способны работать по интерфейсу EtherCAT (поддерживаются протоколы CoE и CiA 402). Шаговые сервоприводы этой серии поддерживают режимы управления положением, скоростью, поиск нулевой точки, а также циклическое синхронное позиционирование (CSP). Сервоприводы серии CS3E могут работать с большинством промышленных контроллеров, в том числе таких производителей, как Beckhoff, Omron и т.д. Сервоприводы серии CS3E обеспечивают отличную производительность, а также высокую надёжность, уменьшенный шум, подавление резонанса. Драйверы серии CS3E предназначены для управления шаговыми двигателями типоразмеров NEMA11/14/17/23/24/34 (фланец 25,36,47,57,60. 86 мм), оборудованными встроенным энкодером с разрешением от 1000 до 5000 имп/об.
Драйверы серии CS3E предназначены для управления шаговыми двигателями типоразмеров NEMA11/14/17/23/24/34 (фланец 25,36,47,57,60. 86 мм), оборудованными встроенным энкодером с разрешением от 1000 до 5000 имп/об.
- поддерживают коммуникационные протоколы CoE, CiA 402
- скорость передачи данных до 100 Mbps
- период синхронизации 500 мкс, 750 мкс, 1 мс, 2 мс, 4 мс, 5 мс
- напряжение питания 20-100 В
- выходной ток от 0,5 до 8 А
- выходной момент подключаемых двигателей от 0,2 до 12 Нм
Шаговые сервоприводы линейки Easy Servo (ES)
Бюджетные приводы с обратной связью серии ES предоставляют возможность их использования в применениях, где ранее можно было использовать только сервопривод. Привод состоит из двухфазного или трехфазного шагового двигателя с энкодером и драйвера. Привод обладает лучшими свойствами шагового и сервопривода. Отсутствие вибрации и высокий крутящий момент на низких частотах, быстрый отклик на управляющий сигнал, обратная связь по скорости, позиции и току. Свойства привода ES
Свойства привода ES
- Обратная связь по скорости, позиции и току.
- Повышенный крутящий момент на высоких частотах.
- Малый нагрев двигателя.
- Малая вибрация двигателя.
- Автоматическая настройка в зависимости от нагрузки.
- Крутящий момент 0.9-8 Н*м (в зависимости от двигателя).
- Ток 0-8.2 А.
- Напряжение питания 20-100 В постоянный ток (в зависимости от драйвера)
ШАГОВЫе СЕРВОПРИВОДЫ фирмы KINCO (Китай-Германия)
Серводрайвер FD122 предоставляет возможность использования шаговых двигателей в применениях, где ранее можно было использовать только обычные серводвигатели. Привод состоит из трехфазного шагового двигателя с энкодером и драйвера. Привод обладает лучшими свойствами шагового и сервопривода. Отсутствие вибрации и высокий крутящий момент на низких частотах, быстрый отклик на управляющий сигнал, обратная связь по скорости, позиции и току.
- Интерфейсы управления: CAN и RS232.
- Разрешение энкодера 2500 имп/об.
- Режимы пропорционального управления и поиска нулевой метки.
- Режимы управления: PUL/DIR, CW/CCW, A/B.
- Возможность подключения граничных датчиков и датчика нулевой метки.
- Крутящий момент 1-8 Н*м (в зависимости от двигателя).
- Ток 4-8.5 А.
- Напряжение питания 24-70 В постоянного тока
<div><img src=»//mc.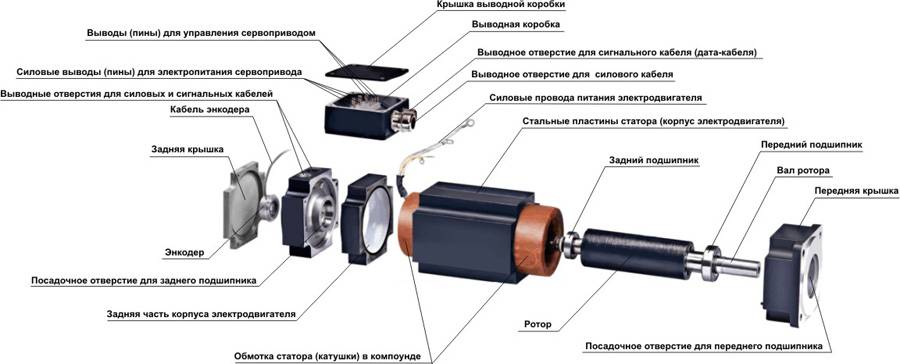 yandex.ru/watch/27368645″ alt=»» /></div>
yandex.ru/watch/27368645″ alt=»» /></div>
Серводвигатель
против шагового двигателя: что подходит для вашего приложения?
Инженерная истина гласит, что идеального решения не существует, есть только лучшее решение проблемы. Это относится, в частности, к серводвигателям и шаговым двигателям. Оба широко используются в промышленности. Тоже не универсальное решение. Однако при правильном применении как шаговый двигатель, так и серводвигатель могут обеспечить эффективное и надежное питание для очень успешной системы. Дерево решений для выбора между ними имеет много ветвей, но наиболее важными из них являются скорость, ускорение и целевая цена.
Оба широко используются в промышленности. Тоже не универсальное решение. Однако при правильном применении как шаговый двигатель, так и серводвигатель могут обеспечить эффективное и надежное питание для очень успешной системы. Дерево решений для выбора между ними имеет много ветвей, но наиболее важными из них являются скорость, ускорение и целевая цена.
Шаговые двигатели состоят из ротора с постоянными магнитами и неподвижного статора с обмотками. Когда ток проходит через обмотки статора, он создает распределение магнитного потока, которое взаимодействует с распределением магнитного поля ротора, создавая вращающую силу. Шаговые двигатели имеют очень большое количество полюсов, обычно 50 и более. Драйвер шагового двигателя подает питание на каждый полюс последовательно, так что ротор вращается с серией приращений или шагов. Из-за очень большого количества полюсов движение кажется непрерывным.
Шаговые двигатели имеют ряд положительных качеств. Поскольку они генерируют пошаговое движение, они обычно работают в разомкнутом цикле, что устраняет стоимость и сложность энкодера или резольвера. Большое количество полюсов позволяет им генерировать очень высокий крутящий момент при нулевой скорости. Они компактны и в целом экономичны (см. рис. 1).
Большое количество полюсов позволяет им генерировать очень высокий крутящий момент при нулевой скорости. Они компактны и в целом экономичны (см. рис. 1).
Рис. 1. Шаговые двигатели обеспечивают хорошую производительность по экономичной цене для приложений, требующих низкой скорости, ускорения и точности. (Предоставлено Коллморгеном)
С другой стороны, шаговые двигатели имеют ограничения по скорости. Как правило, лучше всего они работают при 1200 об/мин или ниже. Хотя они создают высокий крутящий момент при нулевой скорости, крутящий момент падает по мере увеличения скорости (см. рис. 2). Например, двигатель, который генерирует 100 унций на дюйм при нулевой скорости, может выдавать только 50 унций на дюйм при 500 об / мин и всего 10 унций на дюйм при 1000 об / мин. Теоретически для увеличения крутящего момента можно было бы использовать редуктор, но именно здесь низкая скорость шаговых двигателей становится проблемой. Добавление редуктора 10:1 к шаговому двигателю на 1200 об/мин может повысить крутящий момент на порядок, но также снизит скорость до 120 об/мин. Если двигатель используется для привода шарико-винтовой передачи или аналогичного устройства, он, вероятно, не будет развивать скорость, достаточную для удовлетворения потребностей приложения.
Если двигатель используется для привода шарико-винтовой передачи или аналогичного устройства, он, вероятно, не будет развивать скорость, достаточную для удовлетворения потребностей приложения.
Шаговые двигатели, как правило, не доступны с размерами корпуса больше, чем NEMA 34, при этом большинство приложений подпадают под размеры двигателей NEMA 17 или NEMA 23. В результате редко можно найти шаговые двигатели, способные создавать крутящий момент от 1000 до 2000 унций-дюймов.
Шаговые двигатели также имеют ограничения по производительности. Вы можете думать о шаговом двигателе как о системе с массой пружины. Двигатель должен прервать трение, чтобы начать вращаться и перемещать нагрузку, и в этот момент ротор не полностью контролируется. В результате команда продвинуться на пять шагов может привести к вращению двигателя только на четыре или шесть шагов. Однако если привод дает команду двигателю продвинуться на 200 шагов, он сделает это с точностью до нескольких шагов, что в этот момент представляет собой ошибку в несколько процентов.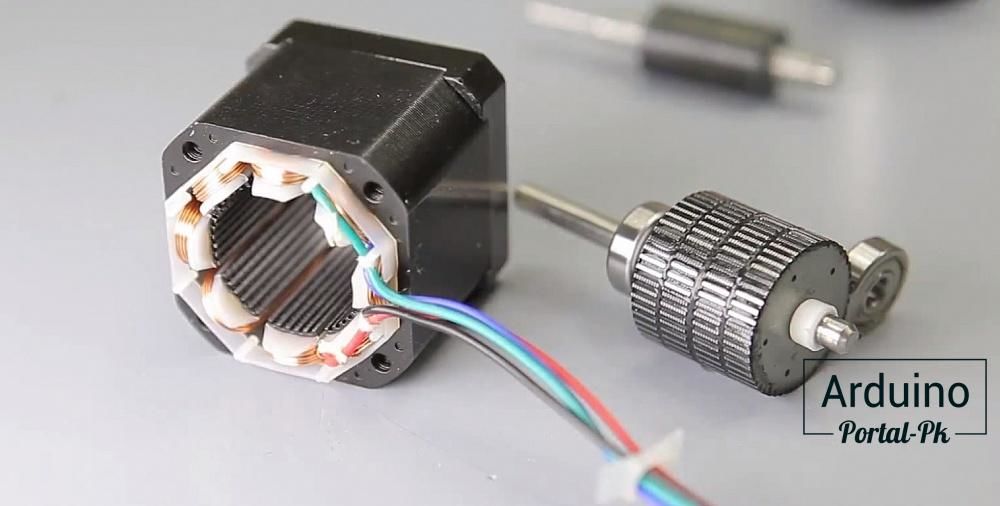 Хотя мы управляем шаговыми двигателями с разрешением обычно от 25 000 до 50 000 шагов на оборот, поскольку двигатель представляет собой систему пружинных масс под нагрузкой, наше типичное разрешение составляет от 2000 до 6000 шагов на оборот. Тем не менее, при этих разрешениях даже 200-шаговое перемещение соответствует доле градуса.
Хотя мы управляем шаговыми двигателями с разрешением обычно от 25 000 до 50 000 шагов на оборот, поскольку двигатель представляет собой систему пружинных масс под нагрузкой, наше типичное разрешение составляет от 2000 до 6000 шагов на оборот. Тем не менее, при этих разрешениях даже 200-шаговое перемещение соответствует доле градуса.
Рис. 2. Как видно из этих кривых зависимости крутящего момента от скорости, шаговые двигатели обеспечивают максимальный крутящий момент при нулевой скорости, при этом крутящий момент падает по мере увеличения скорости (зеленый). Напротив, крутящий момент серводвигателя остается примерно постоянным во всем рабочем диапазоне (синий и красный). (Любезно предоставлено Kollmorgen)
Добавление энкодера позволит системе точно отслеживать движение, но не сможет преодолеть базовую физику двигателя. Для приложений, требующих повышенной точности и разрешения позиционирования, серводвигатели являются лучшим решением.
Серводвигатели
Как и шаговые двигатели, серводвигатели имеют множество исполнений. Рассмотрим наиболее распространенную конструкцию, включающую в себя ротор с постоянными магнитами и неподвижный статор с обмотками. Здесь также ток создает распределение магнитного поля, которое воздействует на ротор, создавая крутящий момент. Однако серводвигатели имеют значительно меньшее количество полюсов, чем шаговые двигатели. В результате они должны работать в замкнутом цикле.
Рассмотрим наиболее распространенную конструкцию, включающую в себя ротор с постоянными магнитами и неподвижный статор с обмотками. Здесь также ток создает распределение магнитного поля, которое воздействует на ротор, создавая крутящий момент. Однако серводвигатели имеют значительно меньшее количество полюсов, чем шаговые двигатели. В результате они должны работать в замкнутом цикле.
Рис. 3. Серводвигатели с обратной связью с обратной связью обеспечивают высокую точность позиционирования в сочетании с большей скоростью и ускорением, чем шаговые двигатели. Компромисс заключается в увеличении стоимости, размера и сложности. (Предоставлено Коллморгеном)
Как правило, серводвигатели более сложны, чем шаговые двигатели. Они работают значительно быстрее, чем шаговые двигатели, со скоростью порядка нескольких тысяч об/мин (см. рис. 3). Это позволяет использовать серводвигатели с редукторами для обеспечения гораздо более высокого крутящего момента на полезных скоростях. Они также обеспечивают более постоянный крутящий момент во всем диапазоне скоростей двигателя. В отличие от шаговых двигателей они не имеют удерживающего момента как такового. Однако работа в замкнутом контуре позволяет контроллеру/приводу дать команду, чтобы нагрузка оставалась в определенном положении, а двигатель будет выполнять постоянные регулировки, чтобы удерживать ее в этом положении. Таким образом, серводвигатели могут фактически обеспечивать удерживающий момент. Обратите внимание, однако, что сценарий крутящего момента при нулевой скорости зависит от правильного выбора двигателя для управления нагрузкой и предотвращения колебаний относительно заданного положения.
Они также обеспечивают более постоянный крутящий момент во всем диапазоне скоростей двигателя. В отличие от шаговых двигателей они не имеют удерживающего момента как такового. Однако работа в замкнутом контуре позволяет контроллеру/приводу дать команду, чтобы нагрузка оставалась в определенном положении, а двигатель будет выполнять постоянные регулировки, чтобы удерживать ее в этом положении. Таким образом, серводвигатели могут фактически обеспечивать удерживающий момент. Обратите внимание, однако, что сценарий крутящего момента при нулевой скорости зависит от правильного выбора двигателя для управления нагрузкой и предотвращения колебаний относительно заданного положения.
В серводвигателях обычно используются редкоземельные магниты, в то время как в шаговых двигателях чаще используются менее дорогие обычные магниты. Редкоземельные магниты позволяют развивать более высокий крутящий момент в меньшем корпусе. Серводвигатели также получают преимущество в крутящем моменте за счет своего общего физического размера. Диаметр серводвигателя обычно варьируется от NEMA 17 до 220 мм. в результате сочетания этих факторов серводвигатели могут развивать крутящий момент до 250 футо-фунтов.
Диаметр серводвигателя обычно варьируется от NEMA 17 до 220 мм. в результате сочетания этих факторов серводвигатели могут развивать крутящий момент до 250 футо-фунтов.
Сочетание скорости и крутящего момента позволяет серводвигателям обеспечивать лучшее ускорение, чем шаговые двигатели. Они также обеспечивают повышенную точность позиционирования благодаря работе в замкнутом контуре.
Заключительные мысли
Серводвигатели обеспечивают неоспоримое преимущество в производительности. Однако с точки зрения повторяемости шаговые двигатели могут быть вполне конкурентоспособными. Этот момент поднимает распространенное заблуждение о шаговых двигателях, которое является мифом о потерянном движении. Как мы уже обсуждали ранее, пружинно-массовая природа шагового двигателя может привести к потере нескольких шагов. Однако, поскольку привод дает команду шаговому механизму переместиться в угловое положение, потерянные шаги не переносятся с одного вращения на другое. Вращение к вращению, шаговые двигатели очень воспроизводимы. Ищите более подробное обсуждение этой темы в следующем сообщении в блоге.
Вращение к вращению, шаговые двигатели очень воспроизводимы. Ищите более подробное обсуждение этой темы в следующем сообщении в блоге.
Что нужно знать для выбора подходящего двигателя
- Требования к крутящему моменту
- Требования к скорости
- Требуемое ускорение
- Масса груза и инерция
- Бюджет
9 0051 Ограничения по размеру
Приведенное выше обсуждение подводит нас к последнему ключу. различие между шаговыми осями и сервоосями, которое стоит. Шаговые двигатели обычно не требуют обратной связи, в них используются менее дорогие магниты и редко используются редукторы. Из-за большого количества полюсов и их способности создавать удерживающий момент они потребляют меньше энергии при нулевой скорости. В результате шаговый двигатель может быть на порядок дешевле, чем сопоставимый серводвигатель.
Подводя итог, можно сказать, что шаговые двигатели являются хорошим решением для приложений с низкими требованиями к скорости, ускорению и точности. Шаговые двигатели также имеют тенденцию быть компактными и недорогими. Это делает эти двигатели подходящими для применения в медицине, биотехнологии, безопасности и обороне, а также в производстве полупроводников. Серводвигатели — лучший выбор для систем, требующих высокой скорости, высокого ускорения и высокой точности. Компромисс — более высокая стоимость и сложность. Серводвигатели обычно используются в упаковке, конвертировании, обработке полотна и подобных приложениях.
Шаговые двигатели также имеют тенденцию быть компактными и недорогими. Это делает эти двигатели подходящими для применения в медицине, биотехнологии, безопасности и обороне, а также в производстве полупроводников. Серводвигатели — лучший выбор для систем, требующих высокой скорости, высокого ускорения и высокой точности. Компромисс — более высокая стоимость и сложность. Серводвигатели обычно используются в упаковке, конвертировании, обработке полотна и подобных приложениях.
Если ваше приложение снисходительно, а бюджет — нет, подумайте о шаговом двигателе. Если производительность является наиболее важным аспектом, серводвигатель выполнит эту работу, но будьте готовы заплатить больше.
Об авторе
Билл Лэки (Bill Lackey) — вице-президент по инженерным продажам компании Motion Solutions.
Новый метод управления сочетает в себе производительность сервопривода и стоимость шагового двигателя категория низкой стоимости, но низкая производительность.

Что делает этот метод мощным, так это то, что он может использовать обычный нестандартный шаговый двигатель, но при этом извлекать из него гораздо большую производительность. Это достигается путем добавления энкодера и работы двигателя как коммутируемого двухфазного бесщеточного двигателя постоянного тока.
Тот факт, что необходим энкодер, означает, что действительно недорогие приложения не будут хорошими кандидатами для шагового сервопривода. Но для приложений, которые в противном случае имели бы бесколлекторный двигатель постоянного тока, шаговый сервопривод все чаще рассматривается как альтернативный подход.
В дополнение к предложению более дешевого решения, чем сопоставимый бесщеточный двигатель постоянного тока, шаговый сервопривод может фактически превзойти бесщеточные двигатели в таких областях, как скорость ускорения и выходной крутящий момент. Это делает его кандидатом для таких приложений, как высокоскоростные перемещения «точка-точка», текстильное оборудование, намотка катушек, высокоскоростные электронные кулачки и многое другое.
Так как же работает шаговый сервопривод? Чтобы ответить на этот вопрос, мы начнем с краткого обзора традиционных схем управления шаговыми двигателями, а затем подробно рассмотрим, чем отличаются шаговые сервоприводы и что они могут сделать для современного конструктора машин.
Я был на полном ходу
Шаговые двигатели популярны прежде всего потому, что они просты в использовании. Им не требуется энкодер для поддержания их положения, и в отличие от щеточных или бесщеточных двигателей постоянного тока, когда они используются для позиционирования, им не требуется контур сервоуправления. Их преимуществами являются низкая стоимость, высокий выходной крутящий момент и бесщеточная работа. Их главные недостатки – вибрация, шум и ограниченный диапазон скоростей.
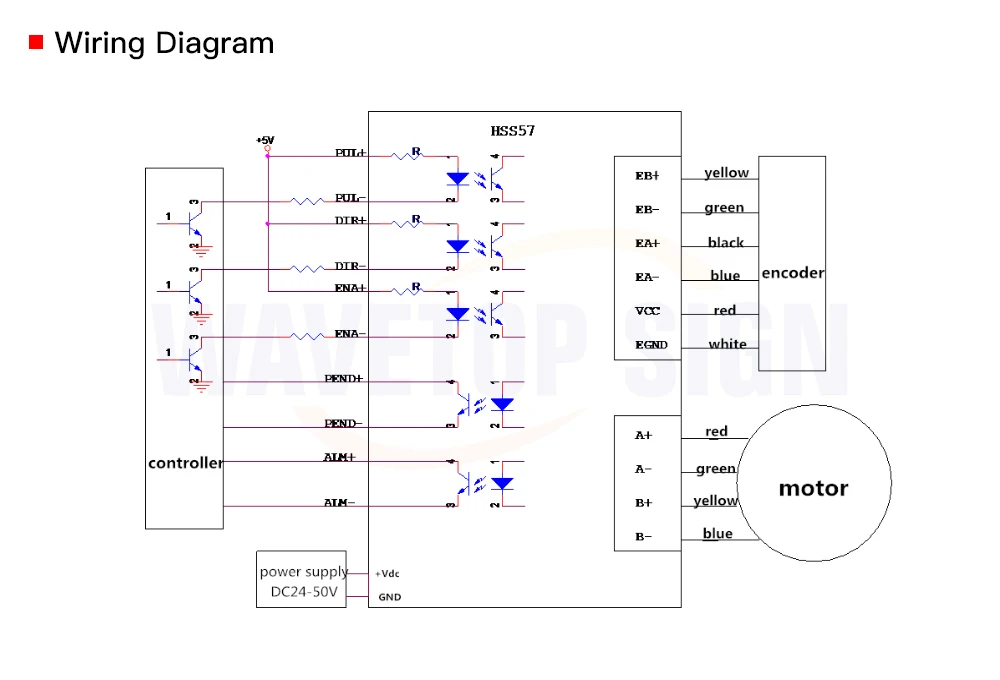
Рис. 1. Традиционные формы сигналов управления шаговым двигателем
На рис. 1 показаны традиционные формы сигналов для привода шагового двигателя. Шаговые двигатели представляют собой многофазные устройства, то есть несколько катушек двигателя электрически возбуждаются для создания движения. Большинство шаговых двигателей имеют две фазы, но существуют и более экзотические конфигурации, такие как 3-фазные или 5-фазные.
Шаговые двигатели представляют собой многофазные устройства, то есть несколько катушек двигателя электрически возбуждаются для создания движения. Большинство шаговых двигателей имеют две фазы, но существуют и более экзотические конфигурации, такие как 3-фазные или 5-фазные.
В мире шаговых двигателей методы фазирования, используемые в усилителях, получили специальные названия, такие как полный шаг, полушаг и микрошаг. Эти различные методы относятся к количеству уровней мощности, которые применяются к каждой катушке двигателя во время электрического цикла. Какой бы метод привода ни использовался, двигатель движется вперед или назад, когда внешний контроллер изменяет электрическую фазировку.
Шаговые двигатели обычно имеют 1,8 механических градуса на полный шаг (90 электрических градусов). Таким образом, это означает, что шаговый двигатель с шагом 1,8 градуса имеет 200 полных шагов за один механический оборот. В дополнение к шаговым двигателям 1,8 градуса существуют другие конфигурации, такие как 0,9 градуса и 7,2 градуса.
В долине B-Field
Теперь давайте посмотрим, что происходит внутри двигателя, и более подробно разберемся, как работает традиционный шаговый двигатель.
Рисунок 2: Модель магнита вращающегося стержня для шаговых двигателей
На рисунке 2 представлена простая магнитная модель шагового двигателя. Ротор можно рассматривать как вращающийся стержневой магнит, взаимодействующий с управляемым извне магнитным полем (статором). Генерируемый крутящий момент равен нулю, когда поле NS ротора выравнивается с магнитным полем NS статора (также называемое B-полем), и максимален, когда два поля находятся под углом 90 электрических градусов друг к другу. Стоит отметить, что фактическая внутренняя конструкция шагового двигателя выглядит совсем не так, но это все же полезный способ понять работу двигателя.
Когда обмотки статора управляются током, создается синусоидальная сила «впадина», которая заставляет шаговый двигатель останавливаться в определенном положении. Чем больше ток проходит через катушки, тем больше глубина долины силы. В этом силовом профиле холмов и долин везде, где кривая горизонтальна, механический крутящий момент не создается, а там, где кривая самая крутая, генерируемый крутящий момент является самым большим.
Чем больше ток проходит через катушки, тем больше глубина долины силы. В этом силовом профиле холмов и долин везде, где кривая горизонтальна, механический крутящий момент не создается, а там, где кривая самая крутая, генерируемый крутящий момент является самым большим.
Рисунок 3: Схема традиционного привода с шаговым двигателем
Как показано на рисунке выше, в традиционной схеме привода с шаговым двигателем двигатель устанавливается в «нижней части» силового профиля. В этот момент чистый крутящий момент, создаваемый двигателем, равен нулю, поскольку двигатель находится в точке равновесия. Это объясняет, почему положение может поддерживаться в шаговом двигателе без энкодера или контура сервопривода.
Для создания движения контроллер перемещает эту долину вперед или назад, изменяя фазу статора через внешние соединения катушек. Затем ротор двигателя «падает» вперед или назад, в ответ удерживаясь на дне долины силы. Представьте себе мяч, опустившийся на дно корыта.
Представьте себе мяч, опустившийся на дно корыта.
В отчаянном поиске плавности хода
Как бы ни была удобна и проста эта схема, она имеет ряд недостатков. Вот краткое изложение:
- Неопределенная точность. Фактическое положение установленного ротора является суммой внутренней силы, восстанавливающей равновесие, и любых внешних сил, действующих на ротор. Поэтому в данном приложении или для данной нагрузки точный фактический путь к профилю будет варьироваться в небольшом масштабе.
- Нестабильность среднего уровня. Возвращаясь к метафоре шара, при резком изменении фазового угла ротор будет продвигаться вперед, но имеет тенденцию вращаться вокруг точки равновесия и, наконец, установится в новый фазовый угол. Обычно этот процесс установления, который происходит очень быстро, не представляет большой проблемы, но когда собственная частота звона равна заданной скорости шага, может возникнуть явление, называемое неустойчивостью среднего диапазона, которое может привести к резкому снижению доступного крутящего момента при данном конкретном режиме работы. скорость.
- Потерянные шаги. Достаточное внешнее усилие может оттолкнуть ротор от его положения равновесия на всем пути вверх и через кривую профиля силы в следующую впадину. Это явление называется потерей шагов и часто является эффектом разгона после его запуска, что означает, что ротор все больше и больше отстает от заданного профиля и в конечном итоге останавливается.
- Избыточное тепло. Для борьбы с явлением потери шагов двигатель работает на уровне крутящего момента, достаточном для работы с наихудшим профилем движения. Это означает, что во всех остальных случаях запрограммированный крутящий момент выше, чем фактически необходимый, что приводит к избыточному теплу.
- Шум. Шаговые двигатели шумят во время движения по нескольким причинам. Если используется полношаговая или полушаговая схема привода, прямоугольные края этих сигналов возбуждения катушки возбуждают резонансы (читай этот шум) в роторе. Другой причиной является большое количество электрических циклов на один механический оборот. Простое перемещение ротора вперед или назад требует, чтобы контроллер постоянно переключал управляющие напряжения вверх и вниз для каждой фазы, что вызывает шум в катушках и, следовательно, в двигателе.
- Вибрация. Все факторы шума, перечисленные выше, также могут вызывать вибрацию. Но, в частности, с микрошаговым приводом существует явление, которое может создавать небольшой шум, но может создавать значительную вибрацию. Из-за геометрии зубьев статора/ротора (особенность всех шаговых двигателей) и особенностей результирующих B-полей связь сигналов привода с поступательным движением никогда не бывает идеальной. Другими словами, график заданного положения и фактического измеренного положения не является точной прямой линией. Это явление приводит к ритмичной вибрации во время движения.
- Низкая максимальная скорость. Для точного позиционирования шаговые двигатели перемещаются лишь на небольшое расстояние для соответствующего продвижения сигнала команды катушки. Стандартный шаговый двигатель с шагом 1,8 градуса требует 50 полных электрических циклов на один механический оборот. Для сравнения, четырехполюсному бесщеточному двигателю постоянного тока требуется всего два электрических цикла на один механический оборот. Индуктивность катушки двигателя ограничивает скорость изменения фазировки, и поэтому шаговые двигатели, как правило, имеют гораздо более низкие максимальные скорости, чем бесщеточные двигатели постоянного тока.
 скорость.
скорость. Другой причиной является большое количество электрических циклов на один механический оборот. Простое перемещение ротора вперед или назад требует, чтобы контроллер постоянно переключал управляющие напряжения вверх и вниз для каждой фазы, что вызывает шум в катушках и, следовательно, в двигателе.
Другой причиной является большое количество электрических циклов на один механический оборот. Простое перемещение ротора вперед или назад требует, чтобы контроллер постоянно переключал управляющие напряжения вверх и вниз для каждой фазы, что вызывает шум в катушках и, следовательно, в двигателе.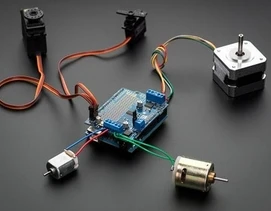 Стандартный шаговый двигатель с шагом 1,8 градуса требует 50 полных электрических циклов на один механический оборот. Для сравнения, четырехполюсному бесщеточному двигателю постоянного тока требуется всего два электрических цикла на один механический оборот. Индуктивность катушки двигателя ограничивает скорость изменения фазировки, и поэтому шаговые двигатели, как правило, имеют гораздо более низкие максимальные скорости, чем бесщеточные двигатели постоянного тока.
Стандартный шаговый двигатель с шагом 1,8 градуса требует 50 полных электрических циклов на один механический оборот. Для сравнения, четырехполюсному бесщеточному двигателю постоянного тока требуется всего два электрических цикла на один механический оборот. Индуктивность катушки двигателя ограничивает скорость изменения фазировки, и поэтому шаговые двигатели, как правило, имеют гораздо более низкие максимальные скорости, чем бесщеточные двигатели постоянного тока.You Had Me At Stepper Servo
Теперь давайте углубимся в технику шагового сервопривода, иногда также называемую шаговой операцией с обратной связью (термин, который немного неоднозначен, поскольку он также используется для описания традиционной схемы управления шаговым двигателем, в которой используется энкодер для проверки конечного положения, тем самым «замыкая» петлю).
Работа шагового сервопривода отличается от работы обычного шагового двигателя тремя ключевыми моментами.
- Во-первых, требуется, чтобы к шаговому двигателю был подключен энкодер с достаточно высоким разрешением. Для стандартных шаговых двигателей на 1,8 градуса вам понадобится энкодер с не менее чем 2000 отсчетов на механический оборот, а для шаговых двигателей на 7,2 градуса 500 — это абсолютный минимум.
- Второе отличие заключается в том, что в режиме шагового сервопривода двигатель работает как бесщеточный двигатель постоянного тока и коммутирует фазовый угол, используя фактическое положение энкодера, а не заданное положение. Перерисовывая нашу диаграмму силы, рисунок ниже показывает, как коммутируемая фазировка означает, что шаговый двигатель работает в самой крутой части долины силы, а не в точке равновесия.
- Третье отличие заключается в том, что высота и фазовый угол формы волны не являются постоянными, а непрерывно изменяются в зависимости от выходных данных ПИД-контура положения, который используется для сервопривода в заданном положении. Опять же, это то же самое, как работает бесщеточный двигатель постоянного тока.
 Для стандартных шаговых двигателей на 1,8 градуса вам понадобится энкодер с не менее чем 2000 отсчетов на механический оборот, а для шаговых двигателей на 7,2 градуса 500 — это абсолютный минимум.
Для стандартных шаговых двигателей на 1,8 градуса вам понадобится энкодер с не менее чем 2000 отсчетов на механический оборот, а для шаговых двигателей на 7,2 градуса 500 — это абсолютный минимум.
Рис. 4. Точка работы шагового сервопривода
4. Точка работы шагового сервопривода
Каковы преимущества такого режима работы шагового двигателя? Их много:
- Нет потерянных шагов. Одним из непосредственных преимуществ является то, что потеря шагов больше не является проблемой. Энкодер, работающий как серводвигатель, определяет положение шагового двигателя, поэтому проблема потери шагов больше не актуальна.
- Меньше тепла. Второе преимущество заключается в том, что работа шагового сервопривода обеспечивает более эффективную работу двигателя, что означает меньшее тепловыделение в двигателе. Коммутируемые двигатели выдают ровно столько крутящего момента, сколько необходимо для достижения желаемого профиля движения, в то время как шаговые двигатели с традиционным управлением управляются большим постоянным током, которого должно быть достаточно, чтобы справиться с наихудшим движением.
- Точность. Точность здесь имеет два измерения. Поскольку энкодер явно измеряет положение двигателя, устраняются причуды определения фактического положения установки ротора, присущие традиционному шаговому двигателю. Во-вторых, точность позиционирования становится независимой от номинала двигателя в градусах на шаг (например, 1,8 градуса на шаг) и разрешения микрошаговой схемы. В случае шагового сервопривода теоретическое разрешение положения определяется исключительно разрешением энкодера, и, следовательно, один и тот же двигатель может достигать 2000 распознаваемых положений за один оборот или 1 000 000 распознаваемых местоположений в зависимости от используемого энкодера.
- Скорость Плавность. Еще одним важным преимуществом является улучшенная плавность скорости. Поскольку традиционный контроллер шагового двигателя не измеряет и не контролирует положение ротора в явном виде, угол ротора имеет тенденцию немного колебаться, поскольку на него влияют внешние силы. Тот же двигатель, работающий в режиме шагового сервопривода, может обеспечить гораздо более точное отслеживание скорости.
- Шум. При использовании шагового сервопривода двигатель производит гораздо меньше шума, чем полношаговый или полушаговый привод, и даже меньше шума, чем микрошаговый привод. Хотя шаговый сервопривод не такой тихий, как типичные бесколлекторные двигатели постоянного тока, он довольно хорошо устраняет классическую проблему шума шагового двигателя.
 Поскольку энкодер явно измеряет положение двигателя, устраняются причуды определения фактического положения установки ротора, присущие традиционному шаговому двигателю. Во-вторых, точность позиционирования становится независимой от номинала двигателя в градусах на шаг (например, 1,8 градуса на шаг) и разрешения микрошаговой схемы. В случае шагового сервопривода теоретическое разрешение положения определяется исключительно разрешением энкодера, и, следовательно, один и тот же двигатель может достигать 2000 распознаваемых положений за один оборот или 1 000 000 распознаваемых местоположений в зависимости от используемого энкодера.
Поскольку энкодер явно измеряет положение двигателя, устраняются причуды определения фактического положения установки ротора, присущие традиционному шаговому двигателю. Во-вторых, точность позиционирования становится независимой от номинала двигателя в градусах на шаг (например, 1,8 градуса на шаг) и разрешения микрошаговой схемы. В случае шагового сервопривода теоретическое разрешение положения определяется исключительно разрешением энкодера, и, следовательно, один и тот же двигатель может достигать 2000 распознаваемых положений за один оборот или 1 000 000 распознаваемых местоположений в зависимости от используемого энкодера.
Вас также может заинтересовать: Шум серводвигателя и как его исправить
Нам понадобится алгоритм побольше используемый с шаговым сервоприводом, выглядит совсем иначе, чем схема управления, используемая с традиционными контроллерами шаговых двигателей с разомкнутым контуром. Эти традиционные контроллеры часто используют относительно простые методы управления током, такие как ШИМ (широтно-импульсная модуляция) с фиксированным временем отключения, и не управляют током явно во время всех фаз электрического цикла двигателя. В частности, для уменьшения тока в катушке используется режим неконтролируемого затухания (иногда выбираемый как быстрое затухание или медленное затухание).

Хотя это достаточно хорошо для большинства традиционных контроллеров шаговых двигателей, это не будет хорошо работать для контроллеров шаговых сервоприводов. Вместо этого шаговые сервоконтроллеры заимствуют схемы управления, используемые с бесщеточным двигателем постоянного тока, и явно контролируют ток на всех фазах генерируемого сигнала.
Рис. 5. Контур ПИД-регулирования
Эта схема управления состоит из трех общих элементов; контур ПИД-регулирования положения, контур тока, а также усилитель режима переключения и контроллер датчика тока. Как показано на рисунке выше, ПИД-контур вводит заданное положение либо от внешнего источника импульсов и направления, либо от внутреннего генератора профиля, и использует измеренное положение энкодера для генерации ошибки положения, а после фильтрации с помощью ПИД-регулятора ток команда.
Рис. 6. Схема токовой петли ВОК
Управление током может осуществляться несколькими способами, но все чаще поле-ориентированное управление (ВОП) используется даже для шаговых двигателей. Хотя FOC часто ассоциируется с управлением бесщеточными двигателями постоянного тока, он имеет значительные преимущества при управлении шаговыми двигателями, которые включают более высокую максимальную скорость и более эффективную работу. Рисунок 6 иллюстрирует поток управления схемы FOC. Результатом алгоритма FOC являются определенные команды PWM для каждой фазы моста. 9Рис. 7. Последовательность расчета ВОК . В дополнение к самой команде ШИМ в контроллер также вводятся другие параметры переключателя MOSFET, такие как время перезарядки и время защиты от пробоя.
Хотя FOC часто ассоциируется с управлением бесщеточными двигателями постоянного тока, он имеет значительные преимущества при управлении шаговыми двигателями, которые включают более высокую максимальную скорость и более эффективную работу. Рисунок 6 иллюстрирует поток управления схемы FOC. Результатом алгоритма FOC являются определенные команды PWM для каждой фазы моста. 9Рис. 7. Последовательность расчета ВОК . В дополнение к самой команде ШИМ в контроллер также вводятся другие параметры переключателя MOSFET, такие как время перезарядки и время защиты от пробоя.
Ток измеряется с помощью гасящих резисторов, подключенных к заземляющей ветви каждой цепи переключателя. Измерение тока в плече сложнее, чем ШИМ-управление с фиксированным временем выключения, требующее специального алгоритма для объединения одновременных измерений с нескольких датчиков. Но его преимущество заключается в том, что он позволяет явно и с высокой точностью управлять током катушки двигателя независимо от того, какой сектор сигнала обрабатывается.
Несмотря на более продвинутую технику управления движением, используемую с помощью шагового сервопривода, по сравнению с традиционным управлением шаговым двигателем, стоимость этой электроники снизилась настолько, что стоимость элементов управления стала уменьшающейся (но не незначительной) проблемой. Не требуя ПЛК, модуля или всей платы управления, ИС, которые могут обрабатывать все аспекты управления шаговым сервоприводом, теперь легко доступны по цене 20 долларов или меньше.
Удешевление
В новых конструкциях машин шаговый сервопривод может быть встроен по мере необходимости, если производительность и экономичность выгодны. Но для существующих конструкций, которые уже используют традиционную схему импульса и направления и усилитель, вариантов меньше.
К счастью, были выпущены новые ИС, которые могут помочь модернизировать существующую систему управления шаговым двигателем для работы шагового сервопривода. Эти продукты вводят входной поток импульсов и направлений и энкодер, а также обеспечивают выходы усилителя, совместимые с полностью управляемой схемой управления током Н-моста.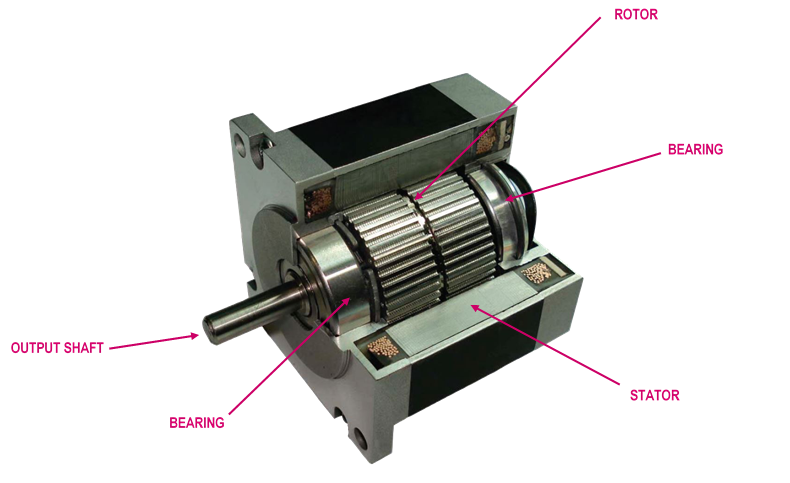 Многие из этих ИС управления движением даже обеспечивают управление током FOC.
Многие из этих ИС управления движением даже обеспечивают управление током FOC.
Рис. 8. Импульс шагового сервопривода и управление направлением
IC, такие как эта, которые позволяют вам подключить функцию «черного ящика» для преобразования традиционного шагового привода в схему шагового сервопривода, позволяют относительно легко модернизировать существующую систему без необходимости переписывать программное обеспечение для создания профилей. Эти ИС также, как правило, поставляются с комплектами разработчика и программным обеспечением для упражнений, что упрощает параллельное сравнение старой системы с новой системой на основе шагового сервопривода.
Подходит ли вам шаговый сервопривод?
Надеюсь, вам понравился этот технический брифинг о многообещающем режиме управления шаговым сервоприводом. Хотя он существует уже более 10 лет, только в последние несколько лет с появлением экономичных энкодеров с высоким разрешением и специализированных недорогих ИС шаговых сервоприводов этот метод начал получать более широкое распространение. принятие.
принятие.
Тем не менее, каждый инженер должен определить, есть ли шаговые сервоприводы в конструкции их машины. Из-за необходимости энкодера шаговый сервопривод не подходит для базовых недорогих приложений движения, где подойдет обычный шаговый двигатель. Кроме того, в высокоскоростных приложениях по-прежнему предпочтительным выбором является бесщеточный двигатель постоянного тока.
Но в чувствительных к стоимости приложениях, требующих высокого выходного крутящего момента и быстрого ускорения, шаговые двигатели, управляемые с помощью технологии шагового сервопривода, представляют собой, возможно, лучшее решение на рынке прямо сейчас. Эти приложения включают в себя машины для захвата и размещения, намотку рулонов, склеивание штампов, вышивку, текстильное оборудование и другие.
Следует ли вам использовать шаговый сервопривод в вашем следующем проекте? Как всегда, особенности вашего приложения будут определять правильный выбор конструкции. Но, без сомнения, разработчики машин должны знать, что может предложить схема управления шаговым сервоприводом, потому что это одна из самых важных разработок в области управления движением за последние десять лет.
Продукты PMD, обеспечивающие шаговый сервоуправление
Компания Performance Motion Devices производит микросхем управления движением , которые уже более двадцати пяти лет обеспечивают расширенное управление положением и крутящим моментом шаговых двигателей, щеточных и бесщеточных двигателей постоянного тока. С тех пор мы также встроили эти микросхемы в модули и платы plug and play. Несмотря на различия в упаковке, все эти продукты контролируются C-Motion , простым в использовании языком управления движением PMD и идеально подходят для использования в машинах для захвата и размещения, лабораторном оборудовании , обработке жидкостей и множестве других высокопроизводительные приложения для управления движением.
Семейство микросхем Juno
MC74113 и MC74113N являются членами семейства ИС Juno и идеально подходят для создания собственного недорогого высокопроизводительного микрошагового или шагового серводвигателя. Микросхемы Juno оснащены FOC (Field Oriented Control), двухфазной генерацией сигнала, сигналами управления усилителем с переключением высокого/низкого уровня, определением тока в ветвях и т. д. Доступные в упаковках размером 7 мм x 7 мм и стоимостью 12 долларов США, эти ИС являются идеальным решением для обновления вашего существующего контроллера импульсов и направления для работы шагового сервопривода или для запуска вашего следующего проекта по проектированию машин с нуля.
Микросхемы Juno оснащены FOC (Field Oriented Control), двухфазной генерацией сигнала, сигналами управления усилителем с переключением высокого/низкого уровня, определением тока в ветвях и т. д. Доступные в упаковках размером 7 мм x 7 мм и стоимостью 12 долларов США, эти ИС являются идеальным решением для обновления вашего существующего контроллера импульсов и направления для работы шагового сервопривода или для запуска вашего следующего проекта по проектированию машин с нуля.
Подробнее >>
ИС серии MC58113
ИС серии MC58113 являются частью популярной ИС управления движением Magellan компании PMD. Семейство и обеспечивают расширенное управление положением для шаговых двигателей, BLDC и щеток постоянного тока. одинаковый Стандартные функции включают в себя S-образное профилирование, FOC (Field Oriented Control), управление высоким/низким переключаемым сигналом, прямой энкодер, ввод импульсов и направления и многое другое.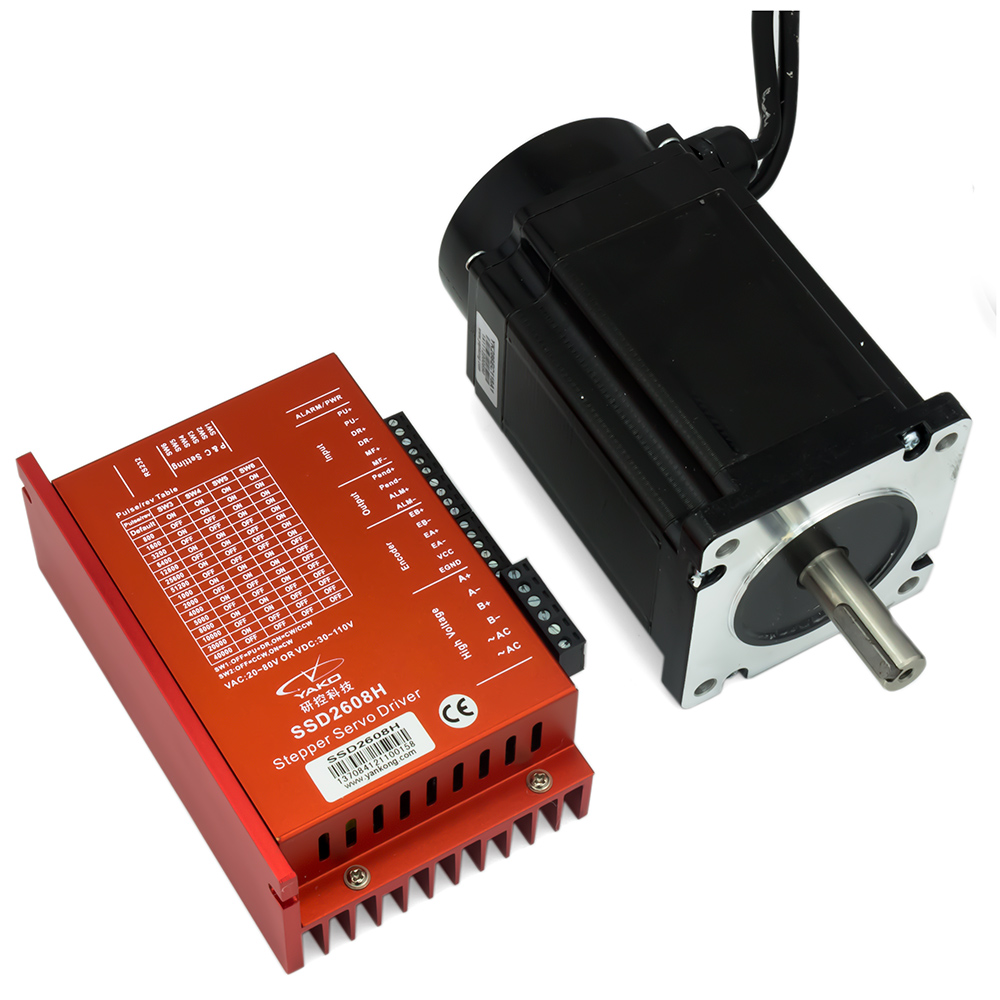 Микросхемы MC58113 могут управлять шаговыми двигателями в режиме шагового сервопривода или в режиме микрошага. Независимо от того, используются ли они для автоматизации лабораторий, управления насосами, систем наведения или автоматизации общего назначения, семейство ИС MC58113 является идеальным решением для вашей следующей конструкции машины.
Микросхемы MC58113 могут управлять шаговыми двигателями в режиме шагового сервопривода или в режиме микрошага. Независимо от того, используются ли они для автоматизации лабораторий, управления насосами, систем наведения или автоматизации общего назначения, семейство ИС MC58113 является идеальным решением для вашей следующей конструкции машины.
Узнать больше >>
Цифровые приводы ION®
Цифровые приводы ION® объединяют одну ось Magellan IC и сверхэффективный цифровой усилитель в компактном прочном корпусе для управление шаговыми двигателями постоянного тока Щеточные и бесщеточные двигатели постоянного тока. В дополнение к расширенным S-образным перемещениям от точки к точке, управлению питанием i2T и загружаемому пользовательскому коду, ION обеспечивают режим управления шаговым сервоприводом для двухфазных шаговых двигателей, а также функции безопасности, такие как обнаружение перегрузки по току, перенапряжению и перегреву.