Содержание
В Новой Москве рухнул беспилотник
Происшествия
8656
Поделиться
Фото: Наталия Губернаторова
В Новой Москве в городке писателей Переделкино упал самодельный беспилотник, сообщает телеграм-канал Осторожно, Москва.
В экстренные службы о происшествии заявил сотрудник культурного центра Переделкино. 46-летний мужчина, как сообщается, увидел на территории аппарат, который упал на улице Погодина.
На место была вызвана полиция. Установлено, что БПЛА самодельный, размер его составляет 25 на 25 см.
Владельца дрона сейчас устанавливают.
Подписаться
Авторы:
Александра Бурнашева
Полиция
Москва
Что еще почитать
Что почитать:Ещё материалы
В регионах
Пентагон подделал видео крушения беспилотника под Крымом
36202
Крым
ФОТО: T.
 ME/KRYUCHKOVOLEG
ME/KRYUCHKOVOLEGГруппа Cream Soda подтвердила гибель своего продюсера
Фото
28985
Ярославль
Внутренний паспорт России для проживающих в Германии соотечественников
15582
Германия
Какие изменения ждут жителей Германии в апреле 2023 года
13233
Германия
Доплата 2 000 евро для пациентов с медицинской страховкой в Германии
12591
Германия
В Севастопольской бухте остановили движение транспорта утром 28 марта
9443
Крым
фото: МК в Крыму
 ME/KRYUCHKOVOLEG
ME/KRYUCHKOVOLEGВ регионах:Ещё материалы
как война подарила Украине перспективную отрасль беспилотной авиации
Дроны-радары, а также разведывательные и ударные беспилотники. В Украине за годы войны стала стремительно развиваться отрасль создания беспилотных летательных аппаратов. Делать технику для нужд армии волонтеры начали еще с началом войны в Донбассе.
В Украине за годы войны стала стремительно развиваться отрасль создания беспилотных летательных аппаратов. Делать технику для нужд армии волонтеры начали еще с началом войны в Донбассе.
За три года некоторые волонтерские проекты стали коммерческими, конструкторы не перестают придумывать новые технологии. Дроны разрабатывают даже школьники и студенты.
Сейчас Евгению Кубову 16 лет, свой первый самолет он собрал в девять. Рядом с его самым первым самолетом из пенопласта стоят более серьезные авиамодели и два беспилотника.
«За последние два-три года, когда началась на востоке война, в Украине очень сильно начала развиваться эта отрасль, потому что раньше даже никто не слышал таких слов как беспилотник или дрон. Сейчас, как только я выйду его позапускать сразу – все видят и говорят: о, это беспилотник», – рассказывает Кубов.
Молодой инженер-конструктор уже успел побывать волонтером – помогал делать беспилотники для армии.
Разрабатывать дроны с началом войны стали даже те, кто делать этого раньше не умел. Один из таких – Павел Косолапкин. Спустя пару лет волонтерской работы в конструкторском бюро он с гордостью показывает летающее крыло «Катана», предназначенное для авиаразведки.
Один из таких – Павел Косолапкин. Спустя пару лет волонтерской работы в конструкторском бюро он с гордостью показывает летающее крыло «Катана», предназначенное для авиаразведки.
«К примеру, стандартный коптер вроде «Фантома» может залететь на 5-7 километров вглубь территории противника, и это очень хорошие показатели при хорошей погоде. Это крыло может при ветре 7-8 метров в секунду залететь на 25 километров вглубь и вернуться», – приводит он характеристики аппарата.
От остальных беспилотников «Катану» отличает не только большой радиус действия, но и простое управление Дрон автоматически взлетает и садится, маршрут можно составить на планшете.
Другой беспилотник создан не только для сбора информации, но и для уничтожения тяжелой техники. Беспилотную платформу «Командор» в будущем планируют вооружить противотанковыми ракетами.
Полет «Командора» с 30 килограммами груза может длиться час. Применять его можно не только на фронте, но и в мирной жизни: для тушения пожаров, патрулирования дорог или обработки полей.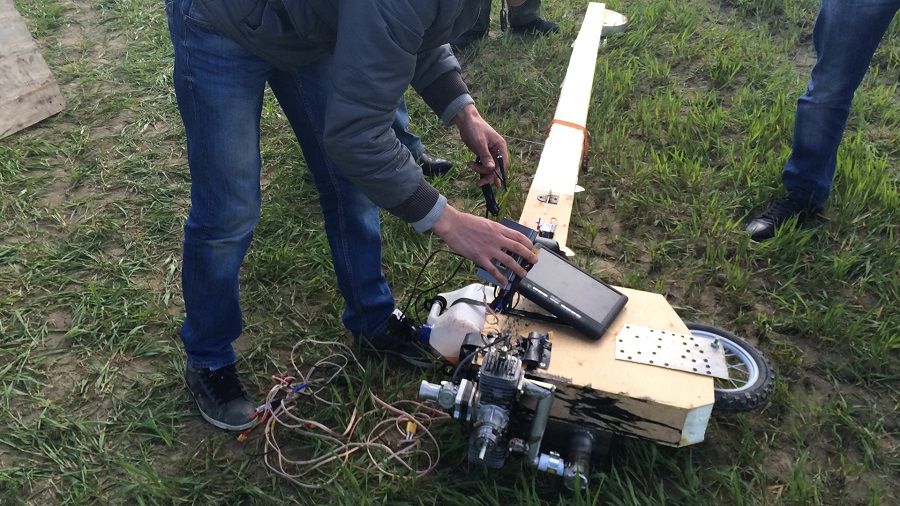 Пока это только экспериментальная версия, но конструкцию уже решили запатентовать.
Пока это только экспериментальная версия, но конструкцию уже решили запатентовать.
«Самое слабое место коптеров – время полета. Можно поднять много, но держаться в воздухе он будет очень мало. Поэтому была задача сделать такую конфигурацию коптера, который смог бы летать на жидком топливе и летать долго, и брать много», – говорит инженер-конструктор проекта «Матрица технологий» Андрей Пуляев.
Несмотря на усилия волонтеров, спустя три года после начала войны потребность военных в беспилотной авиации все еще остается.
«Мы не видим никакой государственной поддержки этой отрасли. К счастью, у нас появился инвестор, который готов вложить сотни тысяч долларов, а может быть и миллионы. У нас во время войны накопился большой опыт применения аппаратов, мы знаем, какие аппараты нужны на войне, как их делать. Мы сделали уникальные вещи, которых нет нигде в мире», – рассказывает куратор проекта «Матрица технологий» Юрий Касьянов.
Волонтеры не сомневаются, что Украина из-за войны станет передовым производителем беспилотников – пока есть те, кто умеет изобретать и готов помогать армии безвозмездно.
Сборка дешевого самодельного дрона
Первоначально опубликовано 24 марта 2019 г.
Самодельный мини-дрон
Содержание
- Обзор
- Компоненты самодельного дрона
- Собираем дрон своими руками
- Резюме
- Связанные статьи
Обзор
Если вы новичок и хотите управлять небольшим прочным дроном в качестве хобби, то эта инструкция для вас! Теперь вы можете собрать свой мини-квадрокоптер своими руками с нуля, и он не просверлит дыру в вашем кармане. Вам больше не нужно покупать дорогие дроны, так как этот дрон не будет стоить вам больше 20 долларов . Вы можете наслаждаться полетом мини-дрона, который весит менее 100 грамм . Итак, давайте посмотрим, что нам нужно для сборки этого дрона.
Компоненты для самодельных дронов
- 4 миниатюрных двигателя: их можно найти в магазине электроники для хобби; выбрать двигатель мощностью 400-500 кВ
Миниатюрные двигатели
2. 4 кожуха двигателя: используются для удержания двигателей на месте
4 кожуха двигателя: используются для удержания двигателей на месте
кожуха двигателя
3. 4 Пропеллера: желательно диаметром 10 см; при покупке убедитесь, что пропеллеры плотно прилегают к ротору мотора
Мини-пропеллеры
4. Литий-полимерный аккумулятор. Аккумулятора на 3,7 В с номиналом 300–500 мА·ч и температурой 25 °С будет достаточно для полета продолжительностью 10–15 минут.
Литий-полимерный аккумулятор
5. Зарядное устройство: зарядное устройство на 3,7 В; вы можете купить его с батареей
6. Пара передатчик-приемник 2,4 ГГц: я использовал плату HY-JJh46; вы можете найти множество таких контроллеров полета в Интернете. Если у вас нет подходящих деталей, вы можете приобрести плату контроллера полета и пульт дистанционного управления (радиопередатчик) для управления дроном. Контроллер полета позволяет вам управлять дроном разными способами, и мы познакомим вас с тем, как это сделать, во второй части, используя Arduino в качестве контроллера полета.
Передатчик-приемник контроллера полета
7. 2 тюбика с чернилами для шариковых ручек: для изготовления лопастей квадрокоптера
тюбики с чернилами для шариковых ручек для изготовления лопастей пропеллеров
8. Материал Thermocol: для крепления схемы
9. Лента/термоклей
Сборка самодельного дрона
Шаг 1
Выньте миниатюрные двигатели и установите их в корпуса. Кроме того, возьмите четыре пропеллера и установите по одному на каждый мотор. Убедитесь, что пропеллеры плотно прилегают к ротору двигателя, чтобы избежать каких-либо сбоев на более позднем этапе.
Подключить двигатели
Шаг 2
Извлеките плату приемника HY-JJh46-RX и подключите четыре двигателя, как показано на принципиальной схеме. Плата, показанная на схемах, отличается от Fritzing, поэтому выполните соединения следующим образом:
- Двигатель RF (правый передний)
- Положительный провод (двигатель) -> вывод RF+ (плата RX)
- Минусовой провод (двигатель) -> контакт RF (плата RX)
- Двигатель LF (левый передний)
- Положительный провод (двигатель) -> контакт LF+ (плата RX)
- Минусовой провод (двигатель) -> контакт LF (плата RX)
- Двигатель LB (слева сзади)
- Положительный провод (двигатель) -> контакт LF+ (плата RX)
- Минусовой провод (двигатель) -> контакт LB (плата RX)
- Двигатель RB (правый задний)
- Положительный провод (двигатель) -> вывод RF+ (плата RX)
- Минусовой провод (двигатель) -> контакт RB (плата RX)
Принципиальная схема подключения двигателей
Шаг 3
Извлеките литий-полимерный аккумулятор (в моем случае 380 мАч, 25C, 3,7 В) и подключите его к плате следующим образом: )
Шаг 4
Возьмите кусок термокола и вырежьте из него кубик размером 5 см x 5 см x 5 см.
Материал Thermocol
Шаг 5
Возьмите две шариковые ручки и извлеките из них чернильные трубки. Теперь пропустите его через термокол-куб таким образом, чтобы чернильная трубка проходила точно через среднюю точку квадрата.
Пропустить чернильные трубки через термокол-куб
Шаг 6
Подсоедините двигатели на обоих концах двух чернильных трубок и затяните винты. Используйте горячий клей/ленту, чтобы закрепить чернильные трубки на месте.
Используйте клей, чтобы соединить моторы на чернильных трубках
Используйте клей для соединения двигателей на каждом конце трубки для чернил
Прикрепите батарею и плату приемника к кубу
Шаг 7
Поместите аккумулятор на верхнюю часть термокуба и поместите на него плату RX. Закрепите сборку с помощью скотча/горячего клея. Вот так! Ваш дрон готов к взлету. Включите кнопку питания в верхней части полетного контроллера и начните веселье.
Резюме
Помните, что вращающиеся пропеллеры дрона чрезвычайно опасны и могут привести к серьезным травмам. Всегда управляйте дроном в открытом месте и избегайте летать близко к людям.
Этим маленьким самодельным дроном очень сложно управлять, поэтому будьте особенно осторожны при управлении им. В следующей статье мы собираемся использовать более устойчивую раму для дрона и использовать Arduino в качестве контроллера полета.
Узнайте больше руководств, чтобы отточить свои навыки работы с дроном с помощью Arduino:
- Как собрать дрон своими руками с нуля. Часть 2. Использование Arduino Nano в качестве контроллера полета
- Как собрать дрон своими руками с нуля. Часть 3. Создание дрона с функцией GPS Follow-Me
- Топ 5 самодельных взломов дронов с использованием Arduino
- Четыре хобби-квеста с дронами, которые вы можете выполнить из дома прямо сейчас
- Знакомство с микродронами для поклонников Maker
Посетите нас в социальных сетях
Узнайте, как создать собственный дрон с нуля
Я знаю, о чем ты думаешь.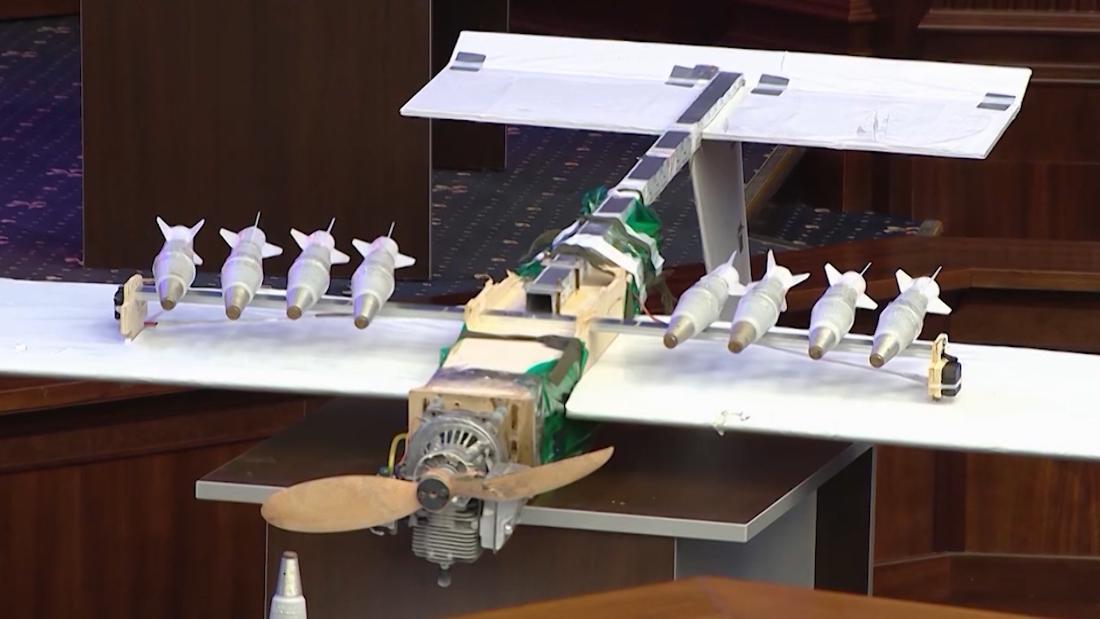 Это много слов, и я даже не уверен, что эта страница именно то, что я ищу . Позвольте мне подытожить:
Это много слов, и я даже не уверен, что эта страница именно то, что я ищу . Позвольте мне подытожить:
Если вы хотите узнать, как построить свой собственный дрон, вы находитесь в правильном месте. Есть много типов людей, которые могут быть заинтересованы в этом новом мире дронов. Тем не менее, это руководство предназначено для ботаников (и я имею в виду это как комплимент).
Если вы один из этих любителей (эвфемизм для ботаника), позвольте мне быть вашим проводником в вашем путешествии по созданию самодельного дрона. Думай обо мне как о Гэндальфе, а о себе как о Фродо. Это слишком удачная аналогия, так как ваше новое увлечение дроном может превратиться в зависимость, как кольцо, которое вы никогда не захотите снимать. Так что будьте осторожны. Я отвлекся.
Это руководство основано на моем курсе по созданию собственного дрона. Если вы хотите узнать больше об этом предмете, курс включает 6 часов видеолекций в структурированном учебном плане.
Это идеальный курс для студентов колледжей и владельцев дронов, а также для тех, кто любит делать что-то своими руками и интересуется летающими роботами. Студенты использовали этот курс в качестве стартовой площадки для создания своих собственных приложений для дронов, поэтому я настоятельно рекомендую ознакомиться с ним, если вы пытаетесь разработать новую инновацию в области дронов.
Студенты использовали этот курс в качестве стартовой площадки для создания своих собственных приложений для дронов, поэтому я настоятельно рекомендую ознакомиться с ним, если вы пытаетесь разработать новую инновацию в области дронов.
Но я отвлекся 🙂
После прочтения этого пошагового руководства вы узнаете:
- Все детали, необходимые для управления дроном
- Как найти свои собственные детали, чтобы сделать свой собственный дрон . Таким образом, предварительно собранный комплект для дрона не требуется
- Как собрать детали, которые вы выбрали
Как показано в пункте 2, это руководство вооружит вас знаниями, позволяющими находить собственные детали, а не просто спаивать электронику из готового комплекта. собранный список деталей, которые входят в комплект дрона. Как говорится «Дай женщине рыбу, она будет сыта один день. Но научите женщину ловить рыбу, и она будет сыта всю жизнь», или что-то в этом роде.
Возможно, у вас уже есть дрон определенного типа, который вы хотели бы построить, например, небольшой квадрокоптер FPV или более крупный октокоптер для подъема полезной нагрузки. Прелесть хобби с дроном заключается в том, что анатомия дрона практически одинакова для любого типа дрона, который вы хотите построить.
Прелесть хобби с дроном заключается в том, что анатомия дрона практически одинакова для любого типа дрона, который вы хотите построить.
Имея это в виду, данное руководство намеренно написано в общем виде, поэтому его можно использовать в качестве справочника для любого типа дронов.
Если вы хотите собрать дрон, описанный в этом руководстве, ознакомьтесь с этим 9Список деталей 0022 Raspberry Pi Drone .
А теперь приступим к созданию самодельных дронов!
Хотите быть в курсе любых будущих проектов беспилотников DIY? Зарегистрируйтесь ниже и никогда не пропустите.
Основные инструменты, необходимые для сборки дрона
- Паяльник и припой (обязательно): Вам понадобится паяльник для сборки некоторых частей вашего дрона.
- Руки помощи (дополнительно): Руки помощи помогут вам оставаться в здравом уме, пока вы пытаетесь паять. Они в основном удерживают часть, которую нужно припаять, на месте.
- Мультиметр (дополнительно): Мультиметр — это просто хороший инструмент, который должен быть в вашем наборе инструментов, и он может очень помочь в диагностике любых электрических проблем, которые могут возникнуть с вашим дроном
- Двусторонняя клейкая лента ( Требуется): Это чуть ли не самая важная часть для сборки любого дрона, и я просто шучу. Вы будете закреплять многие детали на раме просто с помощью двустороннего скотча.
- Липучка (обязательно): Полоска липучки очень удобна для крепления липо-аккумулятора к раме.
- Стяжки (обязательно): Некоторое оборудование дрона легче прикрепить к раме с помощью простых стяжек, таких как ESC (см. ниже).
- Термоусадка или изолента (обязательно): Ваши моторы и регуляторы скорости, вероятно, будут соединены с помощью цилиндрических разъемов (дополнительные сведения см. ниже). Если эти металлические разъемы соприкоснутся во время полета, в цепи произойдет короткое замыкание, и ваш дрон, вероятно, упадет на землю. Избегайте этого ужаса, поместив изолятор вокруг металлических соединителей пуль.

 Избегайте этого ужаса, поместив изолятор вокруг металлических соединителей пуль.
Избегайте этого ужаса, поместив изолятор вокруг металлических соединителей пуль.Основные части дрона для самодельного дрона
Рама
При выборе рамы вашего дрона необходимо учитывать два основных момента. Во-первых, сколько рук. Каждая рука обычно имеет один двигатель, который будет иметь один пропеллер. По этой причине дроны с несколькими двигателями называются просто «мультироторы».
Трикоптер: дрон с тремя двигателями.
Quadcopter: Дрон с четырьмя двигателями.
Гексакоптер: дрон с шестью двигателями.
Octocopter: дрон с восемью двигателями.
Квадрокоптеры, безусловно, самые популярные, поэтому в этом руководстве мы сосредоточимся на том, как сделать квадрокоптер.
Второе, что нужно знать о фреймах, это их размер. В размерах рамы указывается максимальное расстояние, на котором два двигателя находятся друг от друга. Для квадрокоптеров это обычно означает измерение расстояния между двумя диагональными двигателями в миллиметрах (извините, американцы).
Нано Дрон: 80-100 мм
Микро Дрон: 100-150 мм
Малый Дрон: 150-250 мм
Средний Дрон: 250-400 мм
Большой 3 Дрон: + 9003 мм. , выбор размера кадра будет вашим первым шагом. Двигатели Существует два основных типа двигателей: щеточные и бесщеточные. Ваши более дешевые готовые к полету дроны будут использовать коллекторные двигатели, и это потому, что они используют более дешевый двигатель. Несмотря на дешевизну, они изнашиваются и ломаются намного быстрее, чем бесколлекторные двигатели. Бесщеточные двигатели служат намного дольше и являются предпочтительным выбором для сборки дронов своими руками. Существует бесчисленное множество бесколлекторных двигателей. Чтобы помочь вам определить, какой двигатель лучше всего подойдет для вашей сборки, большинство производителей предоставляют вам некоторую информацию о продукте. Двумя наиболее распространенными характеристиками являются размер и рейтинг KV. Рассмотрим конкретный пример. Бесколлекторный двигатель: 2213 935KV Здесь размер двигателя 2213. Это действительно представляет два числа и должно быть показано так: 22-13. 22 — это ширина статора в мм, а 13 — высота ротора в мм. Как правило, чем шире ширина, тем больше крутящий момент у двигателя. Еще одна характеристика бесколлекторных двигателей — рейтинг KV. На нашем примере двигателей это 935кВ. Не путайте кВ с киловольтами. Здесь рейтинг KV означает число оборотов в минуту на один входной вольт. Итак, если мы подадим 1 вольт на двигатель 935 кВ, он будет вращаться со скоростью 935 об/мин. Два вольта на входе вызовут 1870 об/мин и т. д. Двигатели с более низким значением KV производят гораздо больший крутящий момент, поэтому они могут вращать более крупные винты на меньших скоростях для получения подъемной силы. Большие двигатели KV производят гораздо меньший крутящий момент, но вращают винты меньшего размера намного быстрее, чтобы получить подъемную силу. Обычно более крупные дроны используют двигатели с низким KV, а более мелкие дроны используют двигатели с высоким KV. Последнее, о чем я хочу сказать, это то, что большинство производителей покажут вам спецификации деталей, которые следует использовать с двигателем, что может оказаться полезным при выборе деталей после того, как вы выбрали двигатели. Наш образец двигателя поставляется со следующей полезной информацией. Пропеллеры (реквизиты) Следующей частью этой направляющей для дрона являются реквизиты. Пропеллеры всегда будут иметь четырехзначный номер, например 8045, 1045 или 6030. Первые две цифры обозначают диаметр винта в дюймах (ура, американцы!). Таким образом, винт 8045 будет иметь диаметр 8 дюймов. Последние две цифры обозначают шаг в дюймах. Пример 8045 имеет шаг 4,5 дюйма, а винт 6030 имеет шаг 3 дюйма. Шаг немного менее интуитивно понятен, чем диаметр. Качественно, чем выше высота тона, тем больше воздуха будет проталкиваться вниз. Чтобы понять, что на самом деле означает высота звука, воспользуемся аналогией. Винты также имеют шаг. Если вы повернете шуруп на один оборот в кусок дерева, он вонзится в дерево на некоторую постоянную глубину. Теперь давайте представим, что мы поместили шаг нашей опоры 8045 на винт, так что теперь винт имеет шаг 4,5 дюйма. Одно вращение винта заставит его врезаться в дерево на 4,5 дюйма. Теперь мы можем видеть, что чем выше шаг винта, тем больше вещества (воздуха) он будет перемещать. Винт с большим шагом обычно используется с двигателями с низким значением KV, поскольку они обеспечивают больший крутящий момент. Они могут вращаться медленнее, так как пропеллеры с высоким шагом выталкивают много воздуха на единицу оборота. Винты с меньшим шагом используются с двигателями с высоким KV, поскольку они вращаются намного быстрее. Соответственно, они должны вращаться быстрее, так как выталкивают меньше воздуха за один оборот. Электронные регуляторы скорости (ESC) Если вы используете бесщеточный двигатель, вам понадобится электронный регулятор скорости. Коллекторным двигателям не требуется ESC, потому что им нужен только простой вход постоянного напряжения. Бесколлекторные двигатели, с другой стороны, требуют ввода трех противофазных напряжений. Не волнуйтесь, это звучит страшнее, чем есть на самом деле. Все, что вам нужно сделать, это подать на ESC входное напряжение постоянного тока, и он автоматически сгенерирует три противофазных напряжения, которые подключаются к двигателю, заставляя его вращаться. Ваш производитель сообщит вам диапазон входных напряжений, которые может выдержать ваш ESC, так что следите за этим. Обычно ваш ESC поставляется с тремя выходами, и вы припаяете несколько штыревых коннекторов к концам, которые будут присоединены к штыревым коннекторам моторов. Литий-полимерный аккумулятор (батарея Lipo) Аккумулятор питает все компоненты дрона. Почти всегда в качестве аккумулятора для дронов выбирают аккумулятор Lipo. Это связано с его атрибутами высокой емкости и высокого выходного тока. Типичная батарея Lipo имеет следующие характеристики: 3000 мАч 4S 50C Количество ячеек Lipo Начнем с части 4S. Аккумуляторная батарея представляет собой набор отдельных маленьких батареек, называемых ячейками. Липоэлемент всегда имеет напряжение 4,2 В, когда он полностью заряжен, и 3,7 В, когда он разряжен. Таким образом, 4S означает, что четыре из этих Lipo-ячеек были помещены последовательно. Поскольку батареи, соединенные последовательно, добавляют напряжения, мы знаем, что полностью заряженное напряжение всей аккумуляторной батареи составляет: (Число ячеек) (Напряжение полностью заряженного аккумулятора) = (4 ячейки) (4,2 В) = 16,8 В Емкость Индивидуальная липо-ячейка Переходим к спецификации мАч. ПРЕДУПРЕЖДЕНИЕ О СУПЕР-БОТАНИКАХ. ПЕРЕЙДИТЕ К C-РЕЙТИНГУ, ЕСЛИ ВАС НЕ ВАЖНЫ ЕДИНИЦЫ! Но подождите! В мАч нет единиц кулонов! На самом деле это так, но это просто скрыто. Позволь мне объяснить. 1 Ампер = 1 Кулон/секунда = 1 Кл/с 1 час = 1 час = 3600 секунд м = милли = 1/1000 Итак, подставив наши переменные в мАч: 3000 мАч = 3000( 1/1000)(1 C/S)(3600 с) = 10800 кулонов Таким образом, 3000 мАч — это то же самое, что сказать 10800 кулонов. Следующая часть — рейтинг C Рейтинг C Чем выше рейтинг C, тем выше выходной ток для этой батареи. Чтобы узнать максимальный выходной ток, который может выдержать ваша батарея, возьмите показатель C и умножьте его на емкость вашей батареи в Ач. Рейтинг C измеряется в обратных часах (1/час) 3 Ач*50(1/ч) = 150 А Таким образом, эта гипотетическая батарея 50C может выдавать ток 150А! Теперь есть некоторая путаница в отношении того, что на самом деле означает рейтинг C. Плата распределения питания (PDB) Плата распределения питания с разъемом для батареи Плата распределения питания — это то место, где будут подключаться основные электрические компоненты. Основные элементы, которые вы будете припаивать к PDB, — это регуляторы скорости и разъем для аккумулятора. Когда вы подключаете аккумулятор к PDB, он подает питание на все, что к нему подключено, поэтому ваши ESC будут получать ток именно от него. Контроллер полета Контроллер полета — это, по сути, мозг дрона. По сути, это аппаратный концентратор, к которому будут подключаться все части вашего дрона. Такие вещи, как ESC, GPS, телеметрия, вход RC и многие другие компоненты. Все полетные контроллеры должны быть оснащены гироскопом и акселерометром (IMU), которые вместе помогают автоматически балансировать дрон без какого-либо ручного ввода. Плата контроллера полета Pixhawk Все контроллеры полета управляются прошивкой. В зависимости от полетного контроллера у вас может быть доступ к прошивке новой прошивки на плату. Прошивка может быть либо с закрытым исходным кодом (собственность компании, недоступной для общественности), либо с открытым исходным кодом (общедоступный может видеть код и вносить изменения). Если вы хотите сделать дрон с прошивкой с открытым исходным кодом, такой как ArduPilot или PX4, убедитесь, что плата, которую вы покупаете, поддерживается. GPS Модули GPS можно купить довольно дешево. Обычно они используют протокол UART или I2C, и большинство GPS-модулей, предназначенных для использования дронами, также оснащены магнитометром. Вы должны поднять модуль GPS/магнитометра в воздух, чтобы уйти от магнитных полей, создаваемых электроникой вашего дрона. Если ваш GPS находится слишком близко к электронике, это может привести к неверным показаниям, вызывающим забавный полет. Вы хотите построить дрон с хорошим модулем GPS. Ищите тот, у которого есть чип M8N u-blox. Они намного лучше, чем некоторые другие модули GPS, доступные на Amazon, и стоят примерно столько же. Контроллер RC Передатчик радиоконтроллера Контроллер RC будет состоять из передатчика (предмет, который держит пилот) и приемника (для приема команд от пилота). Приемник подключится к вашему полетному контроллеру. У вас есть несколько вариантов с RC-контроллером. Более дешевые RC-контроллеры имеют меньшее количество каналов. Однако минимальное количество каналов, которые вы должны использовать, составляет, вероятно, пять или шесть для дрона. Радиоуправляемый приемник Каждый дрон автоматически занимает четыре канала с помощью элементов управления Roll, Pitch, Yaw и Throttle. Избыточные каналы можно использовать для более уникального управления, например, для изменения режима полета мультикоптера. Телеметрия Телеметрия также используется для беспроводной связи с дроном. Вы определенно хотите построить дрон с телеметрией. Один модуль будет прикреплен к дрону, а другой к компьютеру (иногда его называют наземной станцией управления GCS). Обычно это plug and play. Затем GCS может удаленно связываться с дроном. Он может как отправлять, так и получать информацию. Модули телеметрии Например, GCS может отслеживать положение дрона на карте, определять скорость движения дрона, видеть уровень заряда батареи и многое другое. Его также можно использовать для управления дроном, а это значит, что для его управления вам не понадобится пульт дистанционного управления. Хотя это возможно и реально делается, телеметрия в основном используется для получения данных от дрона. Как правильно выбрать запчасти? Прежде чем вы начнете собирать детали и собирать дрон, нам нужно знать, как найти нужные детали. Основным показателем, который мы будем рассматривать, является отношение тяги к весу, далее именуемое отношением TW. Мы все умеем думать о весе. Это сила, с которой нас притягивает к земле. Дроны также имеют вес и могут летать только в том случае, если они могут создавать восходящую тягу, превышающую их вес. Таким образом, коэффициент TW, равный 2, означает, что дрон может производить восходящую силу в два раза больше, чем его вес. Вы должны стремиться к разным отношениям TW в зависимости от применения вашего дрона. По этой причине определение целевого отношения TW — это первый шаг в процессе разработки собственного дрона, поскольку вы будете выбирать детали для достижения этой цели. Если вы хотите летать на агрессивном дроне с видом от первого лица, обычно используется коэффициент TW от 4 и выше, но я видел и 11. но вы можете летать с таким низким коэффициентом TW, как 1,5. Если коэффициент TW у вашего дрона равен 1, то далеко вы не улетите. Оценка отношения тяги к весу Чтобы оценить отношение TW, вам нужно начать с оценки веса вашего дрона. Это означает просмотр приведенного выше списка деталей и добавление веса различных компонентов (таких как двигатели, ESC, полетный контроллер и т. д.). Вы должны начать с рамы, которую хотите построить, и выбрать оттуда детали. Допустим, ваша оценка веса дрона, который вы хотели построить, составляет 1000 граммов. Если бы у вас была цель TW 2, это означало бы, что вам потребуется тяга 2000 граммов. Для квадрокоптера это будет означать тягу в 500 граммов на каждый мотор. Тяга к весу Оценка тяги двигателя зависит от напряжения батареи, размера винта и выбора двигателя. Измените одну из этих переменных, и вы измените силу создаваемой тяги. Я предпочитаю выбирать двигатели тех производителей, которые предоставляют таблицы тяги. В таблицах тяги есть эмпирические данные, которые показывают, сколько граммов тяги у вас будет для разных переменных. Ниже приведен пример таблицы осевых нагрузок для двигателей eMax 2213 кВ. Для простоты предположим, что максимальная тяга этого двигателя на самом деле была максимальной величиной тяги, указанной в этой таблице. У нас будет максимум 670 граммов тяги при использовании 1045 пропеллеров/батареи 11 В или 49 граммов.0 грамм при использовании батареи 8045 prop/11V. Таким образом, если бы мы использовали винты 8045, мы могли бы создать 1960 граммов тяги (490 г * 4 двигателя) при 11 В. При использовании 1045 винтов мы могли бы создать 2680 грамм тяги (670 г * 4 двигателя) при 11 В. При TW = 2, имея 1960 граммов тяги при 1000 граммах веса, мы довольно близко подошли бы к нашей цели. Если вы хотите более подробно изучить, как выбирать детали для сборки дрона, мой курс по сборке дронов подробно расскажет об этом! Соберите дрон из выбранных вами деталей Правильное направление вращения двигателя Установка крепления GPS Как откалибровать ESC менее чем за 5 минут (2020) Посмотрите это видео на YouTube

 Пропеллер с шагом 0 дюймов будет похож на вращение ножа для масла.
Пропеллер с шагом 0 дюймов будет похож на вращение ножа для масла.
 Выбор правильной батареи имеет решающее значение для создания дрона.
Выбор правильной батареи имеет решающее значение для создания дрона. Это мера емкости, а емкость обычно измеряется в кулонах заряда. Думайте о емкости как об объеме контейнера с жидкостью; он просто показывает, сколько заряда находится в аккумуляторе.
Это мера емкости, а емкость обычно измеряется в кулонах заряда. Думайте о емкости как об объеме контейнера с жидкостью; он просто показывает, сколько заряда находится в аккумуляторе. Рейтинг C некоторых производителей просто означает максимальный импульсный ток, который вы можете выдать в течение 30 секунд, а другие используют рейтинг C для обозначения максимального непрерывного выходного тока. Обратитесь к производителю аккумуляторов, чтобы определить, какой рейтинг C они используют!
Рейтинг C некоторых производителей просто означает максимальный импульсный ток, который вы можете выдать в течение 30 секунд, а другие используют рейтинг C для обозначения максимального непрерывного выходного тока. Обратитесь к производителю аккумуляторов, чтобы определить, какой рейтинг C они используют!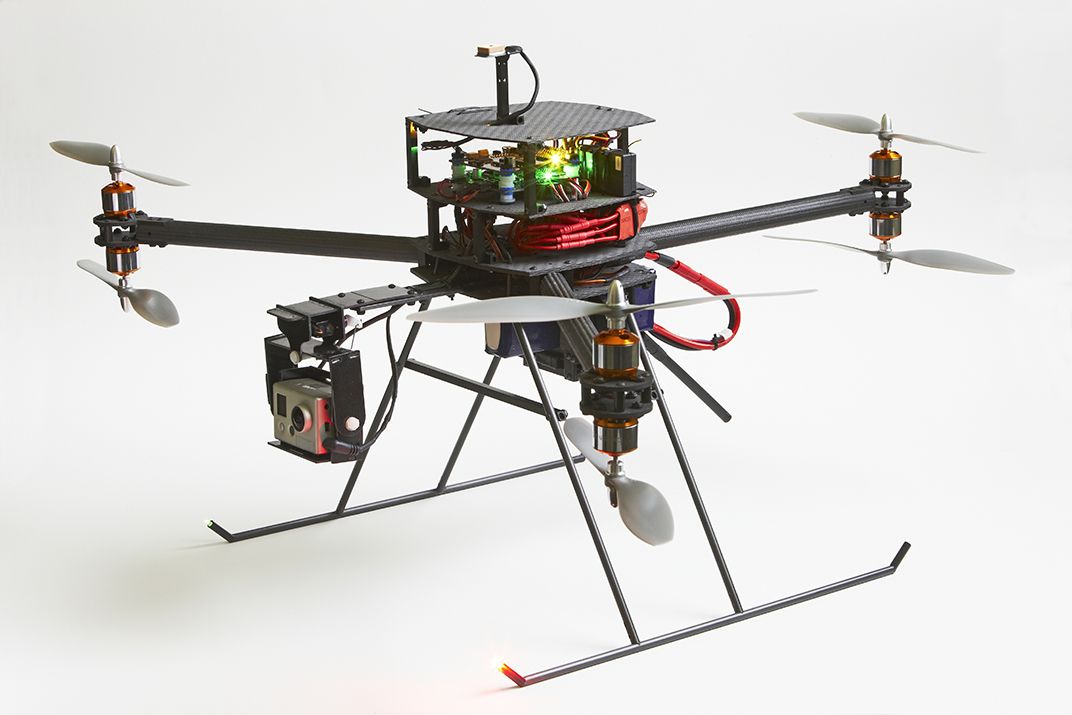


 Процесс выбора правильных частей дрона представляет собой смесь искусства и науки.
Процесс выбора правильных частей дрона представляет собой смесь искусства и науки. TW Соотношения


 Обычно это середина или нижняя часть кадра. Закрепить PDB можно с помощью стяжек
Обычно это середина или нижняя часть кадра. Закрепить PDB можно с помощью стяжек Это также можно сделать с помощью двухстороннего скотча или других средств, таких как винты.
Это также можно сделать с помощью двухстороннего скотча или других средств, таких как винты.