Содержание
Регулятор оборотов с поддержанием мощности, коллекторный без потери мощности, советы по выбору и изготовлению
Залогом долговечности любого двигателя является плавность его работы. Для решения поставленной задачи в коллекторных силовых установках используются регуляторы оборотов с поддержанием мощности. Эти устройства можно приобрести либо сделать своими руками.Регулятор оборотов представляет собой частотный преобразователь, в основе которого лежит мощный транзистор. Он необходим для инвертирования напряжения, а также плавной остановки (пуска) электродвигателя при помощи широко-импульсного управления электрическими устройствами или ШИМ.
- Область применения регуляторов
- Принцип работы устройства
- Рекомендации по выбору
- Изготовление своими руками
Область применения регуляторов
Простым примером такого преобразователя является стабилизатор напряжения, часто используемый в быту. Однако в сравнении с ним регулятор оборотов более функционален. Частотные преобразователи нашли широкое применение и используются во всех электроустройствах. Благодаря их применению не только обеспечивается точный контроль над работой двигателя,
Однако в сравнении с ним регулятор оборотов более функционален. Частотные преобразователи нашли широкое применение и используются во всех электроустройствах. Благодаря их применению не только обеспечивается точный контроль над работой двигателя,
но также достигается экономия электрической энергии, так как силовая установка потребляет лишь необходимую мощность, а не максимальную.
Купить регулятор оборотов двигателя без потери мощности можно для решения следующих задач:
- Контроль температуры мотора без использования дополнительных контроллеров.
- Сокращаются затраты на техническое обслуживание.
- Обеспечивается плавный пуск.
- Экономится электрическая энергия.
Устройство используется во всей бытовой технике, сварочных аппаратах и т. д.
Принцип работы устройства
В состав устройства входит три основных подсистемы:
- Электромотор.

- Микроконтроллерная система управления с блоком преобразователя.
- Привод и связанные с ним механизмы.

После того как электродвигатель был запущен, показатель силы тока в цепи достигает максимальных значений. Причем этот процесс повторяется несколько раз, что приводит к выделению большого количества тепла. В результате долговечность электродвигателя сокращается. Используемое устройство исполняет роль ступенчатого инвертора, обеспечивая двойное преобразование энергии.
В зависимости от подаваемого напряжения, частотный регулятор выпрямляет ток посредством диода, расположенного на входе схемы. Затем ток проходит дополнительную фильтрацию, благодаря нескольким конденсаторам и поступает в микросхему, формирующую ШИМ. Вследствие всех этих процессов обмотка двигателя не подвергается чрезмерной нагрузке.
Рекомендации по выбору
Есть несколько характеристик, на которые необходимо обращать внимание при выборе регулятора:
- Тип управления — в коллекторных электродвигателях используются векторные и скалярные системы управления. Первый вид чаще применяется, но второй является более надежным.
- Мощность — этот показатель должен соответствовать максимально допустимой мощности предохраняемого устройства. Если силовая установка является низковольтной, то стоит остановить выбор на регуляторе с более высоким показателем мощности в сравнении с допустимым.
- Напряжение — подбирается в соответствии с характеристиками двигателя.
- Частотный диапазон — должен полностью соответствовать поставленным задачам, например, для ручного фрезерного станка вполне достаточно 1000 Гц.
 Первый вид чаще применяется, но второй является более надежным.
Первый вид чаще применяется, но второй является более надежным.Все остальные характеристики (габариты, срок гарантии и т. д. ) можно смело считать второстепенными. На рынке достаточно много брендов, выпускающих качественные и сравнительно недорогие устройства.
Изготовление своими руками
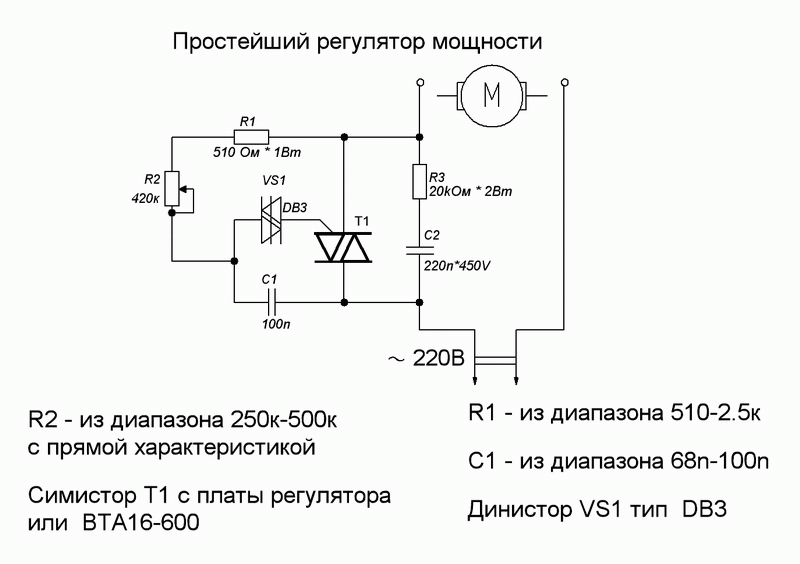
Если устройство планируется использовать в домашних условиях, то порой покупать готовое не имеет смысла. С финансовой точки зрения проще изготовить регулятор оборотов с поддержанием мощности своими руками. Для этого потребуется лишь несколько радиодеталей, которые могут быть легко приобретены. Основным элементом схемы является симистор типа ВТ138−600, а для регулирования оборотов используется потенциометр (обозначен буквой Р).
Для этого потребуется лишь несколько радиодеталей, которые могут быть легко приобретены. Основным элементом схемы является симистор типа ВТ138−600, а для регулирования оборотов используется потенциометр (обозначен буквой Р).
Существует много схем для создания регулятора частоты вращения, но предложенная наиболее проста в изготовлении. Собранное на ее основе устройство может использоваться для решения различных задач, например, в электроприводе швейной машинки или настольного станка. Принцип работы схемы предельно прост: при замедлении вращения двигателя показатель его индукции снижается, что приводит к росту напряжения на С3, R 2 и Р с последующим открытием тиристора.
Хотя предложенная схема проста, она позволяет решить большое количество задач. При желании можно собрать более сложное устройство — тиристорный регулятор с обратной связью. Это выгодное решение с точки зрения экономии электроэнергии, но требующее большего набора знаний в области радиотехники, ведь практически все они основаны на микросхемах, например, TDA 1080.
Надежная схема регулятора оборотов коллекторного двигателя без потерь мощности с обратной связью по Тахо
Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
- Особенности регулирования скорости
- Обобщенная схема регулятора
- Разновидности коллекторных двигателей
- Конструкция мотора
- Выбор схемы
- Особенности конструкции
- Принцип управления
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Обобщенная схема регулятора
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.
Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
- Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования. Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
 Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.Конструкция мотора
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования.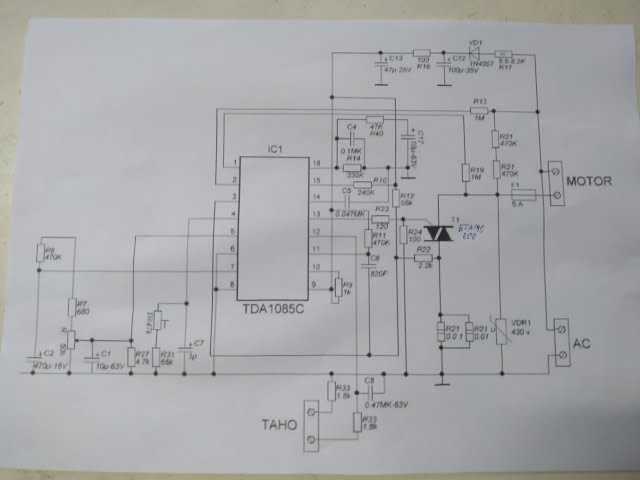 Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
Рассматривая множество схем в интернете, можно сделать вывод о том, что мало кто занимается созданием подобных «агрегатов». Это связано со сложностью принципа управления, так как необходимо организовать регулирование многих параметров. Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования. Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
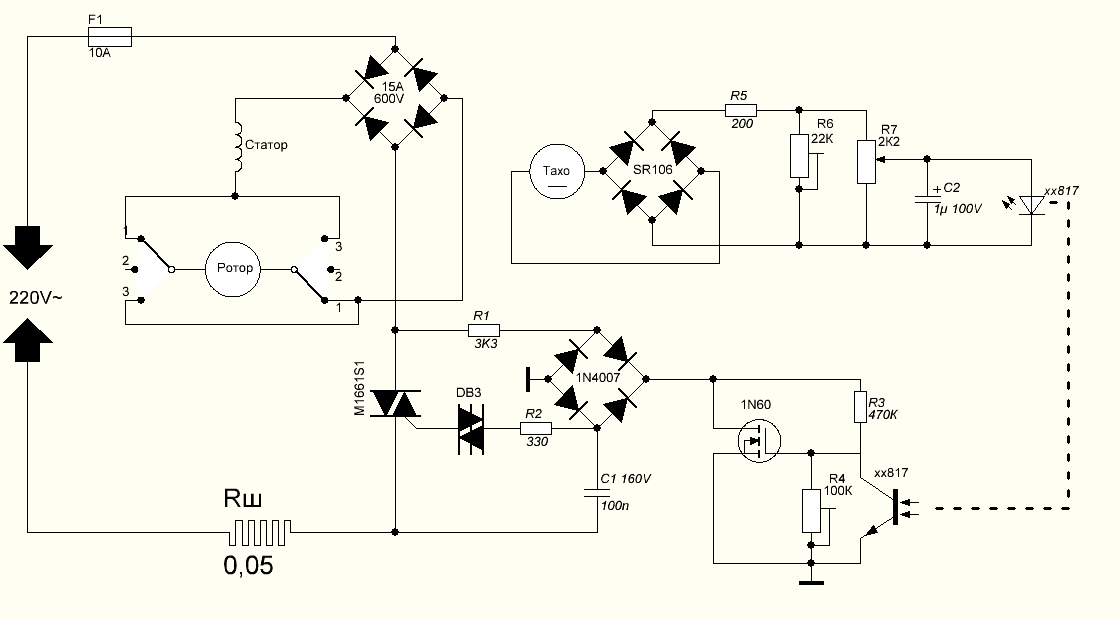
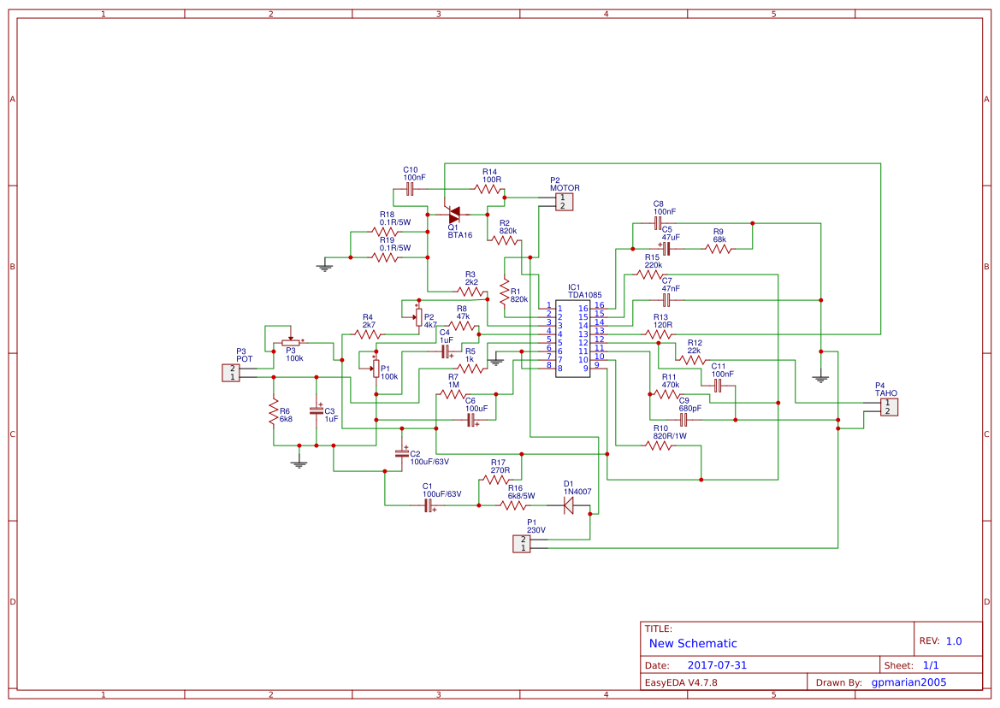
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
- Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
- Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.

Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла.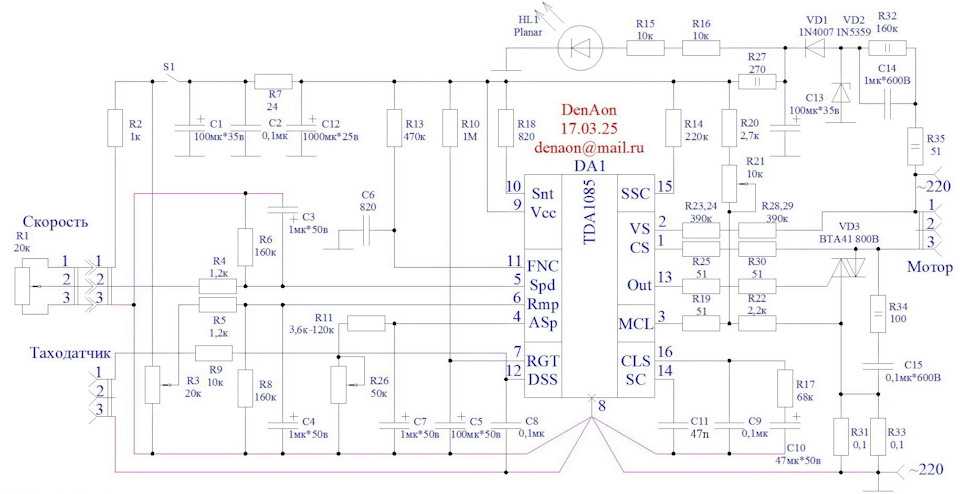 Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
 При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
Учебное пособие по регулятору скорости двигателя. Инженерное мышление
Изучите основы регулятора скорости электродвигателя. В этой статье мы узнаем, как спроектировать простой ШИМ-регулятор скорости для двигателя постоянного тока, изучая, как протекает ток в цепи и что делает каждый компонент. Вы даже можете построить схему самостоятельно!
Прокрутите вниз, чтобы посмотреть обучающее видео на YouTube.
Это простой контроллер скорости с широтно-импульсной модуляцией для двигателя постоянного тока, который использует один из них, таймер 555, и мы собираемся показать вам, как работает схема, как ее спроектировать и даже превратить в профессионала. ищу печатную плату. Вы даже можете скачать копию нашей печатной платы и собрать свою собственную ЗДЕСЬ.
Проектирование схемы
Сердцем нашей системы является таймер 555. Это компонент интегральной схемы, а это означает, что внутри него находится несколько более мелких компонентов, объединенных в один корпус, что значительно облегчает нашу работу как дизайнеров. Мы увидим, как этот компонент работает, когда будем строить схему.
Мы увидим, как этот компонент работает, когда будем строить схему.
Теперь мы собираемся использовать Altium Designer для этого проекта, который любезно спонсировал эту статью. Все наши зрители могут получить бесплатную пробную версию программы ЗДЕСЬ.
Мы начинаем новый проект и создаем нашу схему, а также файл платы. Затем нам нужно начать добавлять наши компоненты, мы можем использовать встроенный инструмент, но мы собираемся использовать надстройку, которая, по нашему мнению, немного упростит задачу. Находим компонент на сайте поставщиков, мы используем mouser, но вы можете использовать кого хотите.
Мы нашли таймер 555, поэтому мы берем номер детали, вставляем его в загрузчик библиотеки и нажимаем «Поиск», он находит компонент, поэтому мы нажимаем «Добавить в дизайн».
Таймер 555 может выдерживать максимальную нагрузку около 200 миллиампер. Мы собираемся управлять одним из этих двигателей постоянного тока от источника питания 12 В, и мы видим, что при 12 В он потребляет ток около 1,4 А, и это без нагрузки, что уже больше, чем может выдержать таймер 555. Поэтому нам нужно будет использовать полевой МОП-транзистор, который представляет собой тип электронного переключателя.
Поэтому нам нужно будет использовать полевой МОП-транзистор, который представляет собой тип электронного переключателя.
Кстати, мы подробно рассмотрели, как работают двигатели постоянного тока в нашей предыдущей статье ЗДЕСЬ .
Мы собираемся использовать полевой МОП-транзистор IRFZ24N, потому что он может работать как с напряжением, так и с током, а также имеет низкое сопротивление сток-исток в открытом состоянии. Итак, мы находим этот компонент и добавляем его в схему. Двигатель будет подключен к выводу стока MOSFET, а вывод истока соединится с землей.
МОП-транзистор обычно блокирует ток, поэтому двигатель не вращается. Однако, если мы подадим небольшое напряжение на вывод затвора, это позволит протекать некоторому току. Чем выше приложенное напряжение, тем больший ток может протекать, и поэтому двигатель вращается быстрее.
Таймер 555 подает напряжение на контакт затвора MOSFET с контакта 3. Для изменения напряжения и управления скоростью двигателя он посылает его в виде импульсов. Каждый импульс длится определенный период времени, в течение которого будет сегмент, когда сигнал включен, поэтому подается напряжение, и сегмент, когда сигнал выключен, поэтому напряжение не подается. Таким образом, МОП-транзистор будет испытывать среднее напряжение для каждого периода времени. Чем шире импульс включения, тем выше будет среднее напряжение. Это широтно-импульсная модуляция, расчеты для которой вы можете увидеть далее в статье.
Каждый импульс длится определенный период времени, в течение которого будет сегмент, когда сигнал включен, поэтому подается напряжение, и сегмент, когда сигнал выключен, поэтому напряжение не подается. Таким образом, МОП-транзистор будет испытывать среднее напряжение для каждого периода времени. Чем шире импульс включения, тем выше будет среднее напряжение. Это широтно-импульсная модуляция, расчеты для которой вы можете увидеть далее в статье.
Ток на вывод затвора очень мал, но мы поместим резистор 1 кОм между выводом затвора MOSFET и выводом 3 таймера 555, это защитит компонент, ограничив ток, если MOSFET выйдет из строя, и пропустит ток вытекать из ворот.
Заряд электронов будет накапливаться на контакте затвора MOSFET, и нам нужно его разрядить, чтобы выключить, поэтому мы помещаем еще один резистор на 1 кОм и подключаем его к земле, что обеспечивает путь разряда.
Я хочу подключить двигатель и источник питания снаружи от печатной платы, поэтому теперь я добавлю клемму для входа и еще одну для подключения двигателя.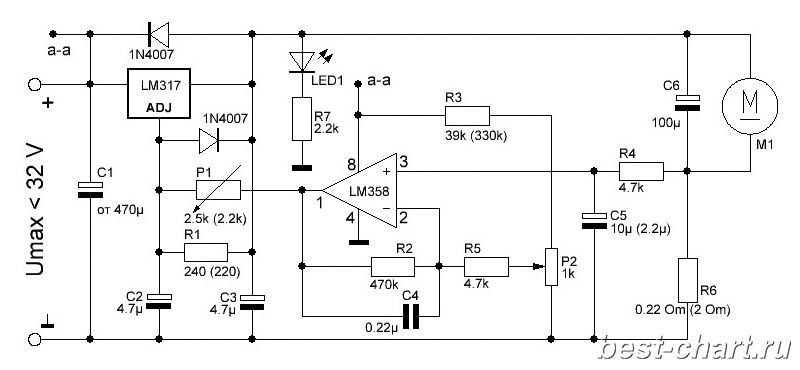 Я также хочу, чтобы встроенный переключатель включал и выключал контроллер, поэтому я нашел подходящий переключатель и добавил его. Теперь мы подключим входную клемму к земле, а затем подключим источник питания к переключателю. Затем мы подключаем выход переключателя к клемме двигателя. Затем подключите клемму двигателя к сливному штырьку MOSFET.
Я также хочу, чтобы встроенный переключатель включал и выключал контроллер, поэтому я нашел подходящий переключатель и добавил его. Теперь мы подключим входную клемму к земле, а затем подключим источник питания к переключателю. Затем мы подключаем выход переключателя к клемме двигателя. Затем подключите клемму двигателя к сливному штырьку MOSFET.
Электродвигатель состоит из витков проволоки, поэтому мы можем считать его катушкой индуктивности. Когда катушки индуктивности включены, они накапливают энергию в своем магнитном поле, когда мощность отключается, это магнитное поле разрушается, и катушка индуктивности выталкивает электроны через цепь. Это вызывает очень большой и внезапный всплеск энергии, который может повредить нашу цепь. Поэтому мы добавляем обратноходовой диод, который обеспечивает путь для безопасной циркуляции и уменьшения энергии. Для этого мы используем диод 1N4007, который выдерживает большой пиковый ток. Итак, мы добавляем это в схему.
Мы подробно рассмотрели катушки индуктивности, диоды и транзисторы в наших предыдущих статьях ЗДЕСЬ — Катушки индуктивности, диоды, транзисторы.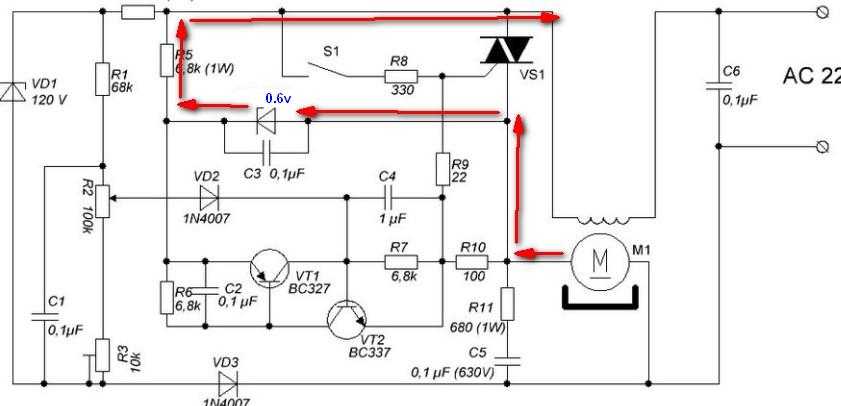
Теперь мы можем подключить контакт 8 таймера 555, который является источником питания компонентов, и мы подключаем его к плюсу. Затем подключаем контакт 1 к земле.
Внутри таймера у нас есть три резистора по 5 кОм между выводами 1 и 8, напряжение уменьшается на треть (1/3) после каждого резистора. Поскольку у нас есть 12 вольт на контакте 8, напряжение уменьшится до 8 вольт после первого резистора, а затем до 4 вольт после второго резистора. Таймер 555 использует их в качестве эталона.
К резисторам подключены два компаратора. Компаратор имеет положительный и отрицательный вход, а также один выход. Первый компаратор подключен к резисторам через отрицательный вход. Положительный вход подключен к контакту 6, пороговому контакту. Компаратор 2 подключен к резисторам через положительный вход. Его отрицательный вход подключен к контакту 2, триггерному контакту.
Теперь компараторы подключены к двум разным напряжениям, поэтому он может их сравнивать. Если положительное входное напряжение выше отрицательного, он выдает высокий сигнал или положительное напряжение. Если отрицательное входное напряжение равно или выше положительного входного напряжения, на выходе будет низкий сигнал или нулевое напряжение.
Если отрицательное входное напряжение равно или выше положительного входного напряжения, на выходе будет низкий сигнал или нулевое напряжение.
Соединим контакты 2 и 6 вместе, чтобы напряжение было одинаковым. Выход компараторов подключается к другому внутреннему компоненту, называемому триггером. Первый компаратор подключается к входу «сброс», второй компаратор подключается к входу «установка». Существует также вывод с именем «не Q». Когда триггер получает высокий уровень сигнала от компаратора 1, он выдает высокий уровень сигнала. Когда триггер получает высокий сигнал от компаратора 2, он выдает низкий сигнал. Если оба компаратора обеспечивают низкий уровень сигнала, триггер остается неизменным и продолжает работу. Затем он проходит через другой компонент, называемый инвертором, который просто инвертирует полученный сигнал.
Если это кажется запутанным, не волнуйтесь, это станет понятным через мгновение, когда мы будем проходить схему.
Если подать небольшое напряжение, скажем, 3,9 В на контакты 2 и 6, компаратор 1 выдаст низкий уровень сигнала, а компаратор 2 выдаст высокий сигнал. Это устанавливает временной интервал для начала. Триггер выдает низкий сигнал. Инвертор выдает высокий уровень сигнала.
Как повышаем напряжение, например до 6 вольт. Компаратор 1 и 2 будут выдавать сигнал низкого уровня, триггер остается неизменным, отсчет времени продолжается. Но при напряжении 8 вольт компаратор 1 выдает высокий сигнал, а компаратор 2 выдает низкий сигнал. Выход триггера теперь меняется на противоположный, и на выходе высокий уровень. Это сбрасывает время.
Выход триггера остается неизменным до тех пор, пока напряжение не упадет примерно до 4 вольт, где компаратор 1 выдает низкий уровень сигнала, а компаратор 2 выдает высокий сигнал, это снова запускает таймер.
Итак, мы видим, что по мере увеличения и уменьшения напряжения на выводах 2 и 6 изменяется выход таймера 555. Итак, чтобы контролировать напряжение и, следовательно, временной интервал, мы подключаем контакты 2 и 6 к конденсатору.
Когда мы подключаем конденсатор к источнику питания, он мгновенно достигает напряжения батареи. Но если мы подключим его через резистор, резистор замедлит время зарядки. Чем больше резистор, тем больше времени требуется, чтобы зарядить напряжение.
Итак, чтобы зарядить наш конденсатор, мы будем использовать фиксированный резистор на 1 кОм и потенциометр на 100 кОм. Потенциометр представляет собой переменный резистор, поэтому мы можем изменять время зарядки конденсатора. Нам также потребуется разрядить конденсатор, чтобы перезапустить таймер. Итак, мы добавим два диода, чтобы создать отдельный путь заряда и разряда. Ток в этой части цепи очень мал, так как резисторы находятся в килоомном диапазоне. Мы будем использовать два диода 1N4148, которые имеют прямой ток около 300 миллиампер, что подойдет для этого приложения.
Конденсатор будет керамическим конденсатором емкостью 10 нанофарад, через мгновение мы поймем почему. Итак, мы добавляем эти компоненты в схему, затем подключаем диоды к постоянному резистору, а диоды к контактам 1 и 3 потенциометра. Затем подключаем конденсатор к земле, а также к контактам 2 и 6 таймера 555, а также к контакту 2 потенциометра.
Контакт 7 является разрядным контактом, который подключен к нашему конденсатору времени. Внутри таймера 555 выход триггера соединяется с выводом затвора внутреннего транзистора. Это контролирует поток тока от конденсатора к земле. Когда на выходе триггера низкий уровень, транзистор закрыт, поэтому конденсатор заряжается, и напряжение начинает увеличиваться. Когда напряжение увеличивается настолько, что на выходе триггера появляется высокий уровень, открывается транзистор, который разряжает конденсатор, и, таким образом, напряжение уменьшается. Когда оно достигает 4 Вольт, конденсатор снова начинает заряжаться, когда он достигает 8 Вольт, он разряжается.
Вы можете узнать, как работают конденсаторы в нашей предыдущей статье ЗДЕСЬ
У нас также есть контакт 5, который является управляющим напряжением. Мы можем использовать это, чтобы переопределить компаратор 1. Нам это не нужно для этой схемы, поэтому мы подключаем его к земле через керамический конденсатор емкостью 0,1 мкФ.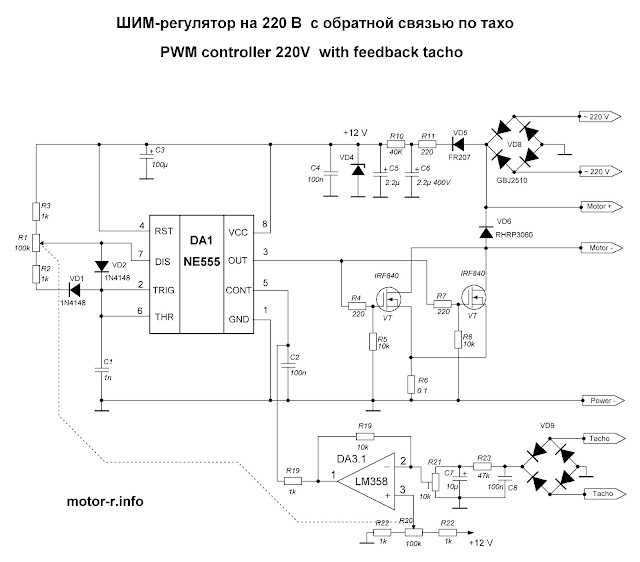 Заземление этого вывода предотвращает случайное переопределение, а конденсатор отфильтровывает любой шум или частоту.
Заземление этого вывода предотвращает случайное переопределение, а конденсатор отфильтровывает любой шум или частоту.
У нас также есть контакт 4, контакт сброса, который мы соединим с плюсом схемы. Мы могли бы использовать это, чтобы переопределить и сбросить триггер, отключив питание. Нам это не нужно для этой схемы, поэтому она подключена к плюсу.
Итак, при зарядке ток течет через резистор, диод и левую часть потенциометра к конденсатору. На выходе триггера низкий уровень, поэтому разрядный транзистор закрыт. Контакт 3 выводит высокий сигнал.
Как только конденсатор заряжается до 8 В, на выходе триггера становится высокий уровень, который включает транзистор, и конденсатор разряжается через правую сторону потенциометра и диода. Контакт 3 выводит сигнал низкого уровня.
Транзистор остается открытым, поэтому конденсатор разряжается до тех пор, пока не достигнет 4 В, после чего триггер снова меняет направление, выключая транзистор и снова запуская отсчет времени.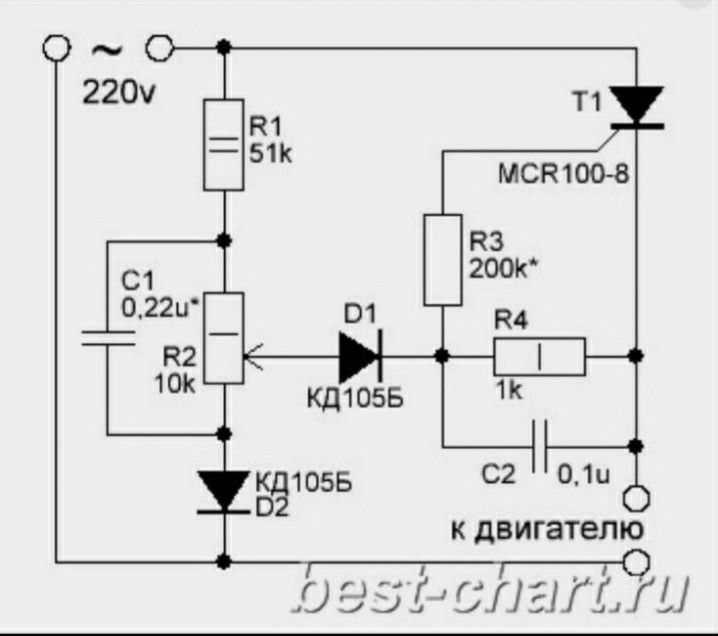 Этот цикл повторяется непрерывно. Конденсатор заряжается и разряжается, создавая пилообразную волну, а таймер 555 выдает прямоугольную волну с широтно-импульсной модуляцией.
Этот цикл повторяется непрерывно. Конденсатор заряжается и разряжается, создавая пилообразную волну, а таймер 555 выдает прямоугольную волну с широтно-импульсной модуляцией.
Мы можем рассчитать производительность следующим образом.
Конденсатор заряжается через резистор R1 и левую сторону потенциометра. Таким образом, время зарядки рассчитывается по этой формуле. Если предположить, что потенциометр был на 50%. Тогда мы получим 0,35 миллисекунды.
Конденсатор разряжается через правую часть потенциометра, поэтому время разрядки рассчитывается по этой формуле. Это дает нам 0,34 миллисекунды.
Каждый цикл представляет собой комбинацию времени включения и выключения, поэтому 0,35 плюс 0,34 дает нам 0,69.миллисекунды.
Частота равна 1, деленной на время цикла, что дает нам 1428 Гц.
Мы используем конденсатор емкостью 10 нанофарад, потому что он обеспечивает очень высокую частоту, а двигатель постоянного тока лучше всего работает на высокой частоте. Если бы мы использовали очень большой конденсатор, например, 100 микрофарад, частота падала бы до 0,14 Герца, и каждый цикл выполнялся бы за 7 секунд. Таким образом, вы можете использовать конденсаторы других размеров, но учтите, как это повлияет на скорость двигателя.
Если бы мы использовали очень большой конденсатор, например, 100 микрофарад, частота падала бы до 0,14 Герца, и каждый цикл выполнялся бы за 7 секунд. Таким образом, вы можете использовать конденсаторы других размеров, но учтите, как это повлияет на скорость двигателя.
Хорошо, теперь я создам простой прототип на макетной плате, чтобы проверить, все ли работает. Вроде нормально, скорость можно регулировать, так что будем доделывать дизайн печатной платы.
Добавляем аннотации. Затем мы импортируем компоненты в файл проекта печатной платы и тратим некоторое время на перестановку компонентов на плате. Когда все будет готово, мы обрисовываем доску и преобразуем ее в «защиту». Затем определите форму платы. Мы добавляем текст на клеммы, чтобы знать полярность цепи, когда будем ее использовать. Затем мы будем использовать функцию автоматического маршрута, чтобы соединить все. Как только он будет завершен, мы увеличим ширину маршрутов, которые будут нести более высокое напряжение и ток. Увеличение до 1 мм должно быть в порядке. Вероятно, нам нужно будет переместить некоторые маршруты в лучшее место, так что проверьте свой дизайн. После того, как мы удовлетворены, мы создаем наш полигон. И, наконец, мы можем экспортировать наши файлы gerber.
Увеличение до 1 мм должно быть в порядке. Вероятно, нам нужно будет переместить некоторые маршруты в лучшее место, так что проверьте свой дизайн. После того, как мы удовлетворены, мы создаем наш полигон. И, наконец, мы можем экспортировать наши файлы gerber.
Изготовление печатной платы
Итак, теперь мы готовы к печати нашей печатной платы.
Мы собираемся использовать JLC PCB для печати нашей печатной платы, которая также любезно спонсировала это видео. Они предлагают исключительную ценность с 5 печатными платами всего за 2 доллара. Обязательно посмотрите их, я оставлю для вас ссылку в описании видео.
Не забудьте, что вы можете скачать мои файлы дизайна, снова ссылки в описании видео для этого.
Итак, мы просто авторизуемся и загрузим наш gerber-файл. Через несколько секунд он генерирует предварительный просмотр схемы на экране. Затем мы можем настроить дизайн с помощью различных цветов и материалов и т. д. Но я оставлю их по умолчанию и сохраню в корзину. Затем мы идем к кассе, заполняем наши почтовые данные, а затем выбираем вариант почтовых расходов. Я лично хочу, чтобы это было очень быстро, поэтому я выбираю экспресс-почту, которая дороже, вы можете выбрать более медленные методы, чтобы сэкономить на расходах. Затем отправляем заказ и оплачиваем.
Затем мы идем к кассе, заполняем наши почтовые данные, а затем выбираем вариант почтовых расходов. Я лично хочу, чтобы это было очень быстро, поэтому я выбираю экспресс-почту, которая дороже, вы можете выбрать более медленные методы, чтобы сэкономить на расходах. Затем отправляем заказ и оплачиваем.
Через несколько дней наша плата приходит по почте. Доски выглядят отлично, я очень доволен результатом.
Итак, начинаем припаивать компоненты к плате. Я начинаю с центра и продвигаюсь вперед. Я использую держатель для таймера 555, который предотвратит повреждение компонента от перегрева и позволит нам легко заменить компонент в случае неисправности. С такими сложными компонентами, как этот, мы можем использовать ленту, чтобы держать их на месте, пока мы их припаиваем.
Таким образом, мы припаиваем все компоненты на свои места, используя ленту везде, где это необходимо. И через несколько минут у нас должна получиться идеально выглядящая печатная плата.
Теперь для теста подключаем стендовый блок питания и двигатель к плате.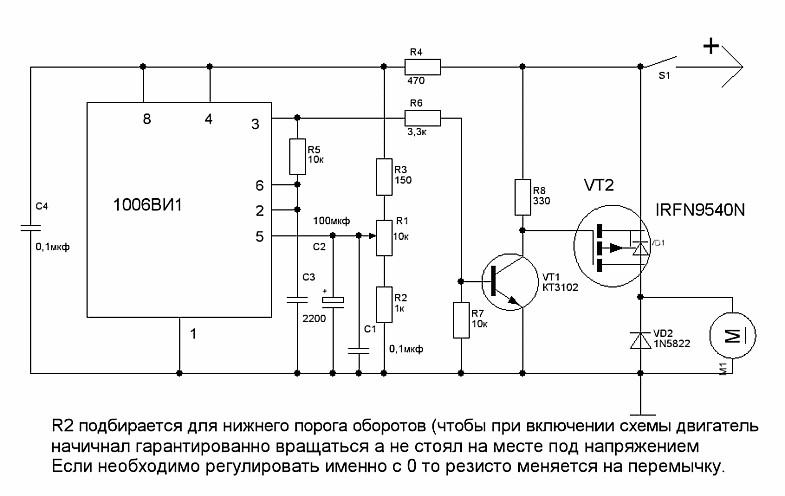 Затем включите питание. Я включаю плату, чтобы подать на нее питание, а затем, когда я настраиваю потенциометр, вал двигателя начинает вращаться. Скорость вращения может быть увеличена или уменьшена очень легко. Итак, у нас есть очень простой контроллер скорости двигателя постоянного тока с широтно-импульсной модуляцией.
Затем включите питание. Я включаю плату, чтобы подать на нее питание, а затем, когда я настраиваю потенциометр, вал двигателя начинает вращаться. Скорость вращения может быть увеличена или уменьшена очень легко. Итак, у нас есть очень простой контроллер скорости двигателя постоянного тока с широтно-импульсной модуляцией.
Посмотрите один из видеороликов на экране, чтобы продолжить изучение электроники, и я встречусь с вами на следующем уроке. Не забудьте подписаться на нас в facebook, instagram, linkedin, а также на engineering mindset.com
Методы управления скоростью различных типов двигателей с регулированием скорости
Скачать PDF Наши блоки управления скоростью включают в себя двигатель, привод (контроллер) и потенциометр, который позволяет легко регулировать скорость.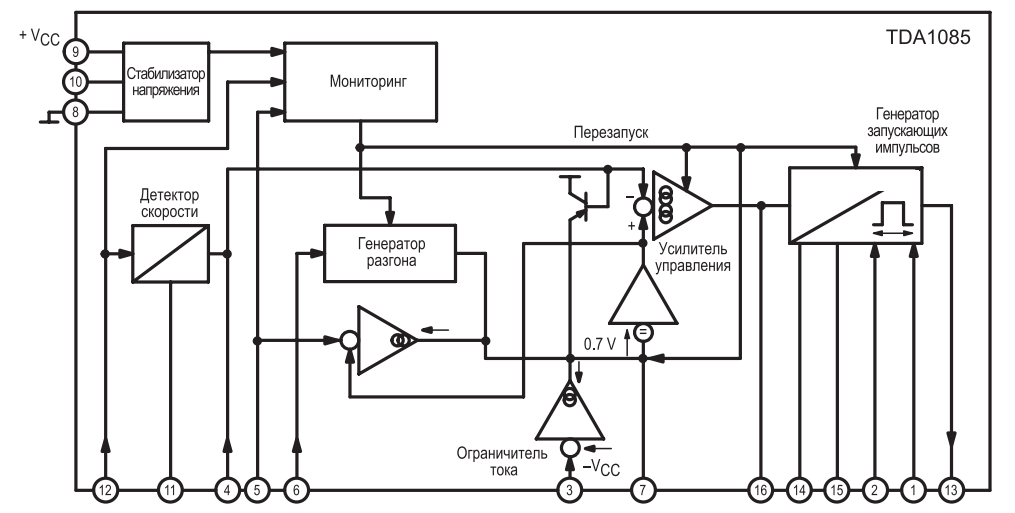 Существует три группы двигателей с регулированием скорости. «Моторный блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсатором, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который сочетает в себе трехфазный асинхронный двигатель с маленький инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
Существует три группы двигателей с регулированием скорости. «Моторный блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсатором, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который сочетает в себе трехфазный асинхронный двигатель с маленький инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
Большое количество двигателей используется для общих целей в нашем окружении, от бытовой техники до станков на промышленных предприятиях. Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Функции и характеристики, необходимые для этих двигателей, очень разнообразны. Если сосредоточить внимание на сегменте управления скоростью на рынке двигателей, серводвигатели и шаговые двигатели регулируют свою скорость с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и/или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и особенности следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Двигатель переменного тока с регулятором скорости и мотор-редукторы
- Бесщеточный двигатель постоянного тока и мотор-редукторы
- Блок инвертора
2. Методы управления скоростью различных двигателей с регулированием скорости
Способ управления выходом схемы управления скоростью можно условно разделить на две группы: управление фазой и управление инвертором, которые составляют группы продуктов, показанные на рис. 1.
Рис. 1 Классификация двигателей с регулируемой скоростью
2.1. Двигатели переменного тока с регулируемой скоростью
2.1.1. Конструкция двигателя
Как показано на рис. 2, конструкция однофазных и трехфазных асинхронных двигателей включает в себя статор, на который намотана первичная обмотка, и литой из цельного алюминия ротор в форме корзины.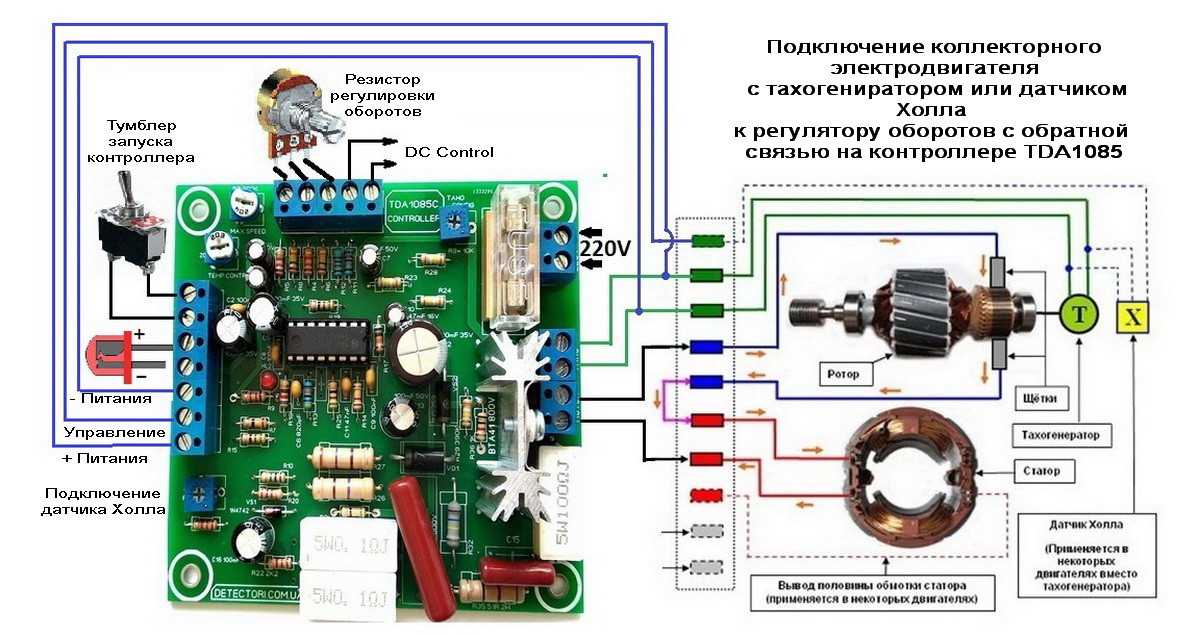 Ротор недорогой, потому что конструкция проста и не использует магнит.
Ротор недорогой, потому что конструкция проста и не использует магнит.
Рис. 2 Конструкция асинхронного двигателя
Когда скорость этого двигателя должна контролироваться, для определения скорости используется тахогенератор, который крепится к двигателю, как показано на рис. 3. Тахогенератор состоит из магнита, подключенного непосредственно к вал двигателя и катушка статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот. Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис. 3 Система управления двигателем переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя можно выразить выражением (1). Когда напряжение, подаваемое на двигатель, увеличивается и уменьшается, скольжение с изменяется, то скорость вращения N будет изменяться.
N = 120· f ·(1- s )/ P · · · · · · · · · · (1)
N : Скорость вращения [об/мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
В случае асинхронного двигателя, как показано на рис. 4, существует стабильный диапазон и диапазон нестабильности на кривой Скорость вращения — Крутящий момент. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление без обратной связи) ограничивается управлением скоростью в узком диапазоне, подобном N1~N3 на рис. 5. Чтобы обеспечить надежную работу даже в В вышеупомянутом нестабильном диапазоне необходимо определить скорость вращения двигателя и использовать механизм управления напряжением (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
Рис. 4 Скорость вращения – характеристики крутящего момента асинхронных двигателей
Рис.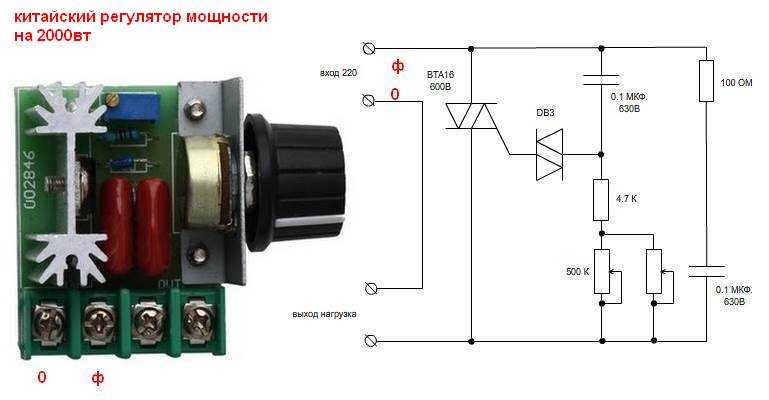 5 Простое управление напряжением
5 Простое управление напряжением
Доступные методы управления напряжением включают управление с помощью трансформатора или фазового управления. На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так просто реализовать с двигателем переменного тока с регулируемой скоростью. В качестве альтернативы, напряжение переменного тока можно регулировать, устанавливая время включения/выключения каждого полупериода напряжения переменного тока (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжения, как показано на рис. 7 и рис. 8. Управление скоростью достигается методом фазового управления путем управления среднеквадратичным значением. значение переменного напряжения.
Рис. 6 Изменение напряжения с помощью трансформатора
Рис. 7 Изменение напряжения с помощью управления фазой 02 Этот метод управления скоростью переменного тока может обеспечить постоянную скорость управление фазой с обратной связью даже в нестабильном диапазоне.
На рис. 9 в виде блок-схемы показана конфигурация системы управления скоростью для двигателя переменного тока с регулированием скорости.
Рис. 9 Блок-схема системы управления двигателем переменного тока
Рис. 10 Форма волны для каждого блока
На рис. 10 показаны формы волны для каждого блока. Заданное значение скорости d и обнаруженное напряжение e скорости, генерируемой тахогенератором, сравниваются в блоке усилителя сравнения. Затем определяется уровень сигнала напряжения и .
Сигнал напряжения и низкий, когда значение обнаруженной скорости достигает заданного значения скорости, и выше, когда заданное значение скорости снижается. Поскольку триггерный сигнал выводится в точке, где треугольная волна b пересекается с сигналом напряжения a , определяется время (фазовый угол) включения симистора с уровнем сигнала напряжения a .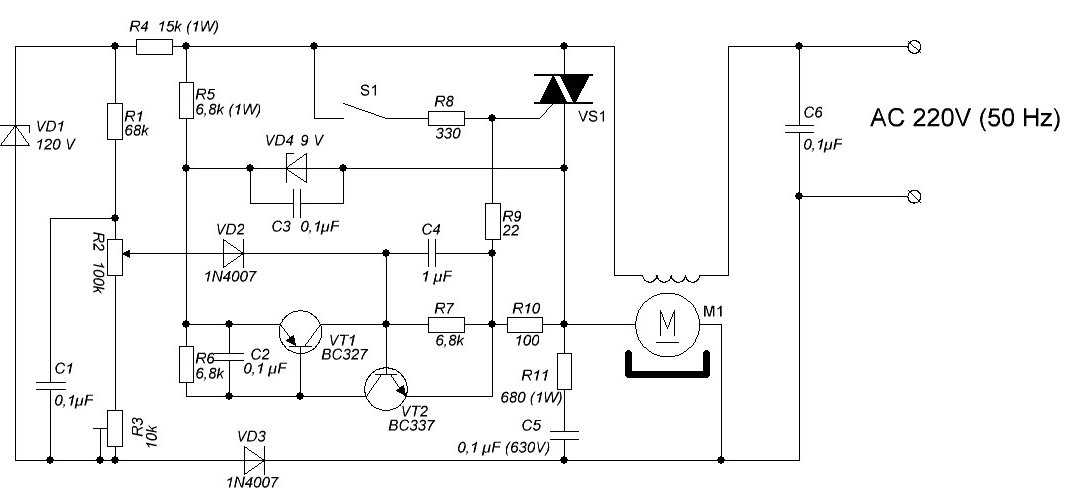 Когда это время медленное, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения снова возвращается, и управление повторяется, так что разница между обнаруженным значением скорости и заданным значением скорости всегда может быть постоянной.
Когда это время медленное, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения снова возвращается, и управление повторяется, так что разница между обнаруженным значением скорости и заданным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид вышеупомянутого регулятора скорости. На рис. 11 рабочая точка двигателя рисует петлю Q-R-S-T-Q с центром в точке O, а скорость вращения поддерживается между N1 и N2. Эта петля максимально уменьшена за счет повышения точности определения скорости.
Рис. 11 Работа регулятора скорости
Электродвигатель регулятора скорости переменного тока имеет следующие особенности при использовании фазового регулирования с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть сконфигурирована просто потому, что сглаживающая схема не нужна, что позволяет получить компактную конструкцию по низкой цене.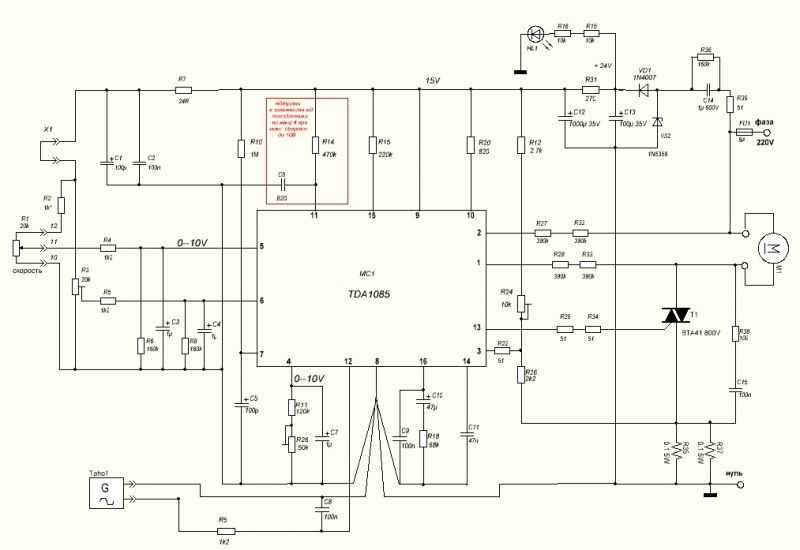
2) Точно так же возможна конструкция с длительным сроком службы, поскольку не нужен большой алюминиевый электролитический конденсатор.
3) Переключение выполняется только один раз в каждом полупериоде стандартного источника питания переменного тока, что позволяет снизить генерируемый шум.
2.1.3. Характеристики
Двигатели переменного тока с регулированием скорости вращения обычно имеют характеристики скорости вращения и крутящего момента, показанные на рис. 12.
Рис. 12. «Линия безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный блок управления скоростью постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, то катушка соединена звездой (звездой) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагничены в многополюсной конфигурации, как показано на рис. 14.
намагничены в многополюсной конфигурации, как показано на рис. 14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов для каждого оборота ротор.
Рис. 14 Конструкция бесщеточного двигателя постоянного тока
2.2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики скорости вращения бесщеточного двигателя постоянного тока имеют отрицательный наклон, когда его скорость не регулируется, что аналогично характеристике коллекторного двигателя постоянного тока.
Рис. 15. Характеристики скорости вращения бесщеточного двигателя постоянного тока
скорость N1. Когда приложен момент нагрузки T1, рабочая точка смещается к Q, а скорость вращения уменьшается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3.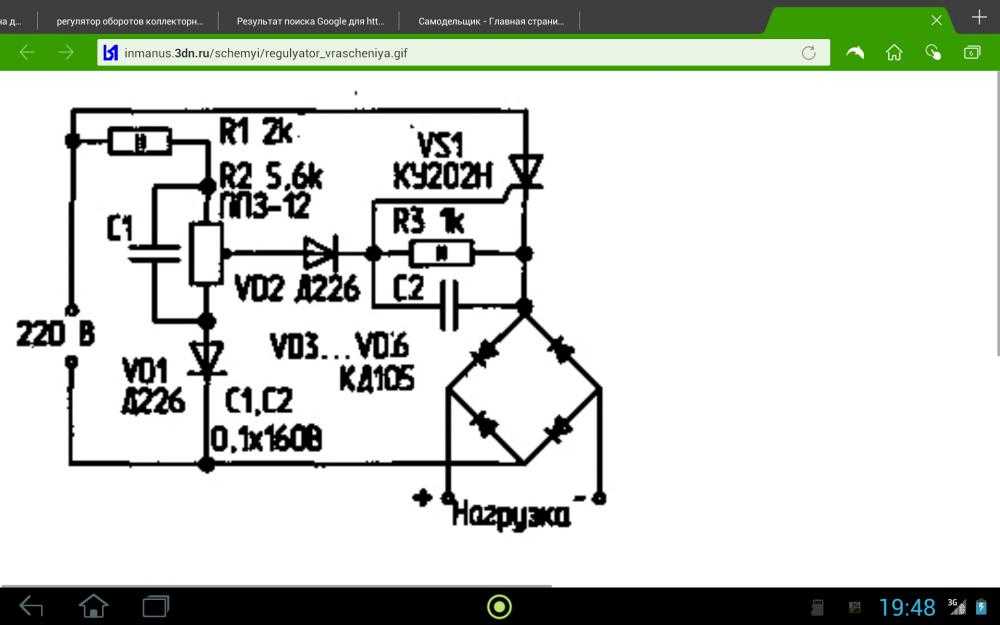 Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизм управления скоростью должен будет изменять входное напряжение только всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизм управления скоростью должен будет изменять входное напряжение только всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Это управление напряжением осуществляется инвертором в выходной части схемы управления (драйвер). Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как показано на рис. 16 (b), с помощью шести переключающих элементов (FET или IGBT), показанных на рис. 16 (a).
Рис. 16 (a) Выходная часть цепи управления (драйвер)
Рис. 16 (b) Последовательность переключения 16 (а), а состояние ВКЛ/ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка становится полюсом N или полюсом S.
Фактически положение магнитного полюса ротора определяется интегральной микросхемой Холла, и соответствующий переключающий элемент включается или выключается, как показано на рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включены, и ток течет из фазы U в фазу W. В это время U-фаза возбуждается как полюс N, а W-фаза становится полюсом S, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1). ~ 12).
16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включены, и ток течет из фазы U в фазу W. В это время U-фаза возбуждается как полюс N, а W-фаза становится полюсом S, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1). ~ 12).
На рис. 17 показана конфигурация для управления скоростью бесщеточного двигателя постоянного тока в виде блок-схемы.
Рис. 17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от микросхемы Холла в части определения положения блок-схемы, и двигатель вращается.
Затем сигнал от IC Холла отправляется на детектор скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом задания скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения. Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения.
Бесщеточные двигатели постоянного тока имеют следующие характеристики.
1) Он имеет высокий КПД, поскольку используется ротор с постоянными магнитами и вторичные потери малы.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость отклика.
3) Двигатель можно уменьшить, поскольку он очень эффективен.
4) Небольшие колебания скорости при изменении нагрузки.
На рис. 16 показана типичная последовательность переключения (метод подачи питания на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод синусоидального привода, получая информацию о положении ротора с высоким разрешением от программного обеспечения из сигнала Холла IC. Этот метод приводит к малошумному приводу, поскольку ток, который течет к двигателю, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, приложенных методом синусоидального привода и методом 120-градусного привода
2. 2.3. Характеристики
2.3. Характеристики
Характеристики скорости вращения бесщеточного двигателя постоянного тока имеют ограниченный рабочий диапазон в дополнение к непрерывному рабочему диапазону.
Область ограниченного режима работы очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме продолжается в течение пяти секунд или более, активируется функция защиты привода от перегрузки, и двигатель замедляется до полной остановки.
2.3. Блок управления скоростью инвертора
2.3.1. Принцип управления скоростью
Инверторный блок регулирует скорость трехфазного асинхронного двигателя путем изменения частоты f напряжения, подаваемого на двигатель. Инверторный блок изменяет частоту f путем изменения цикла ВКЛ/ВЫКЛ шести переключающих элементов, а скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120· f ·(1- s )/ P ·· · · · · · · · · (1)
N : Скорость вращения [об/мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл ВКЛ/ВЫКЛ, как показано на рис. 21. Время ВКЛ/ВЫКЛ регулируется таким образом, чтобы среднее двигатель приобретает синусоидальную форму путем сравнения треугольной волны, называемой несущей, с синусоидальной формой сигнала. Этот метод называется ШИМ-управлением.
21. Время ВКЛ/ВЫКЛ регулируется таким образом, чтобы среднее двигатель приобретает синусоидальную форму путем сравнения треугольной волны, называемой несущей, с синусоидальной формой сигнала. Этот метод называется ШИМ-управлением.
Рис. 19 Управление работой ВКЛ/ВЫКЛ
Метод управления скоростью наших инверторных блоков делится на два типа: управление без обратной связи, которое просто изменяет скорость, и управление с обратной связью, которое снижает скорость изменение при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация системы управления в виде блок-схемы.
Рис. 20 Блок-схема управления без обратной связи
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и может достигать высоких скоростей (частота может быть установлена до 80 Гц) просто тогда, когда регулирование скорости при различных нагрузках не так важно.
Создаваемый крутящий момент Т двигателя определяется формулой (2). Из этого соотношения можно сказать, что крутящий момент также будет постоянным, если V/f, отношение напряжения V к частоте f, будет постоянным.
T = K ・ I・V / f ・・・0 (920)
T : Крутящий момент [Н·м]
V : Напряжение питания [В]
I : Ток двигателя [A]
f :01 Частота [Гц] 0137 : Константа
Однако чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f. Следовательно, чтобы получить постоянный крутящий момент от низкой скорости до высокой, необходимо отрегулировать отношение V/f на низкой скорости в соответствии с характеристиками двигателя, как показано сплошной линией на рис. 23.
Рис. 21 Управление V/f
2) Управление с обратной связью
На рис.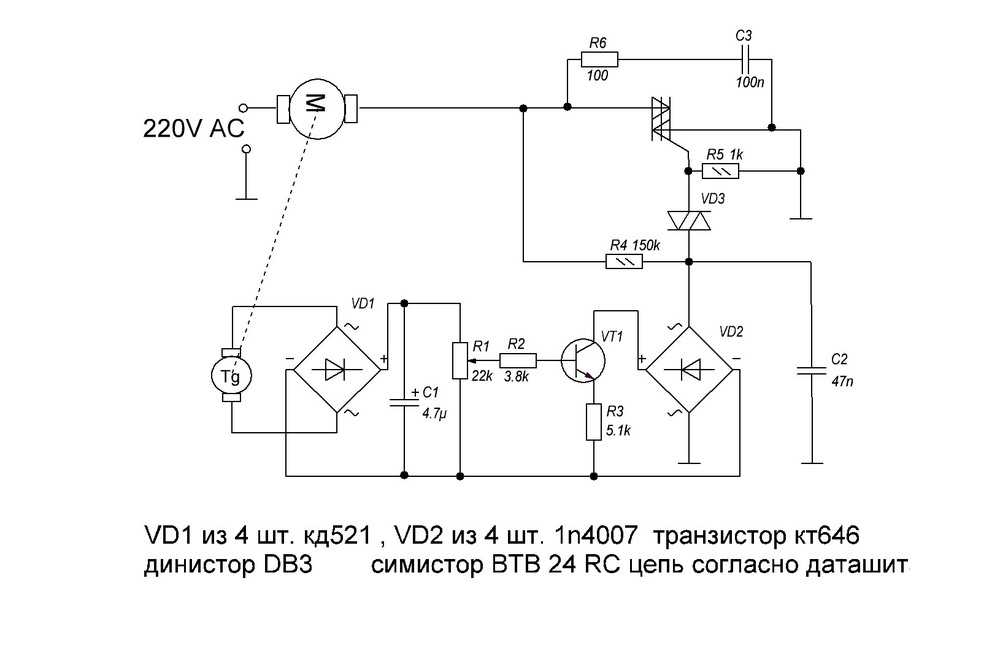 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис. 22 Блок-схема управления с обратной связью
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, используя данные характеристик. таблице (рис. 25), подготовленной заранее, и регулирует частоту преобразователя без необходимости использования датчика скорости на двигателе.
Рис. 23 Характеристики Таблица
С помощью этой таблицы характеристик и обнаруженного времени разности фаз t инвертор вычисляет выходную частоту инвертора, которая соответствует команде скорости вращения Nset, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления V/f вычисляет напряжение, подаваемое на двигатель, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM.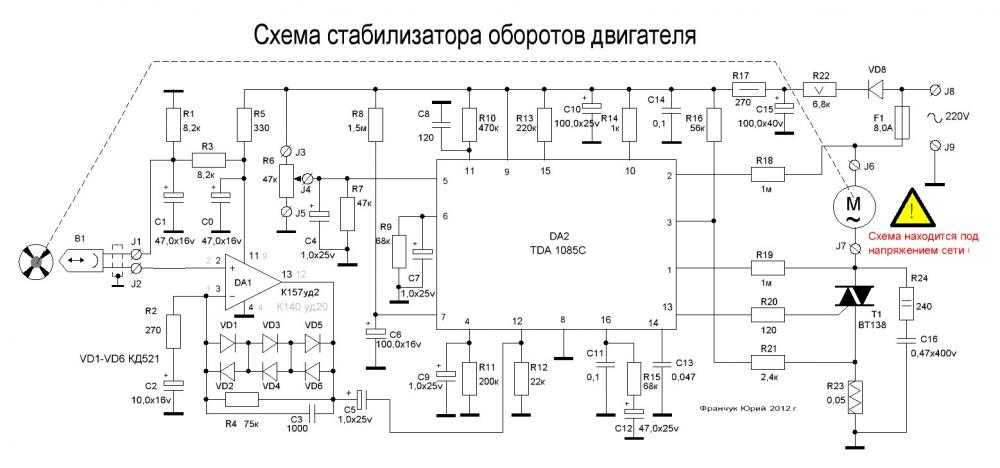 В результате при приложении нагрузки выходная частота инвертора повышается, так что можно компенсировать снижение скорости вращения. (3)
В результате при приложении нагрузки выходная частота инвертора повышается, так что можно компенсировать снижение скорости вращения. (3)
2.3.2. Характеристика s
Характеристики скорости вращения и крутящего момента инверторного блока показаны на Рис. 26 и Рис. 27. Как поясняется в разделе, посвященном двигателю с регулированием скорости переменного тока, на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет собой предел непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис. 24. Характеристики скорости вращения для управления без обратной связи
) для использования в широком диапазоне приложений управления скоростью. Подходящий продукт для управления скоростью можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, необходимой для вашего приложения.