Содержание
Расчет и настройка ремённой и винтовой придачи ЧПУ станка. Калибровка.
Продолжаем разбираться с ЧПУ станком. Настройку прошивки GRBL рассмотрели тут: Прошивка grbl 1.1, настройка — инструкция на русском. Но где же взять параметры для настройки ЧПУ станка? Сегодня в статье рассмотрим, как можно рассчитать винтовую и ременную передачу ЧПУ станка. Но расчет не всегда дает 100% результат. Для проверки и корректировки неточности используется калибровка ЧПУ станка. Как это сделать на практике я уже рассказывал в проекте:ЧПУ плоттер на Arduino своими руками.
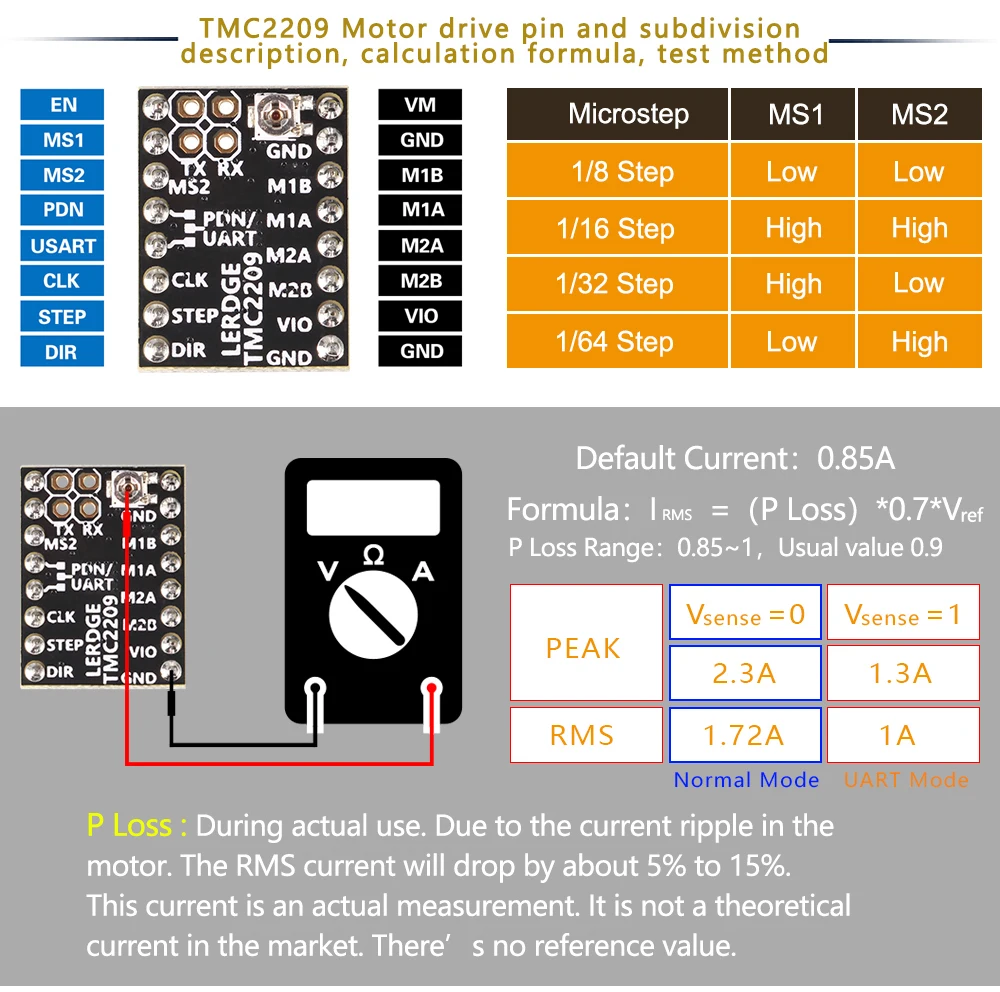
При расчете нужно учитывать один немало важный параметр, который мы еще не рассматривали подробно – это Микрошаг.
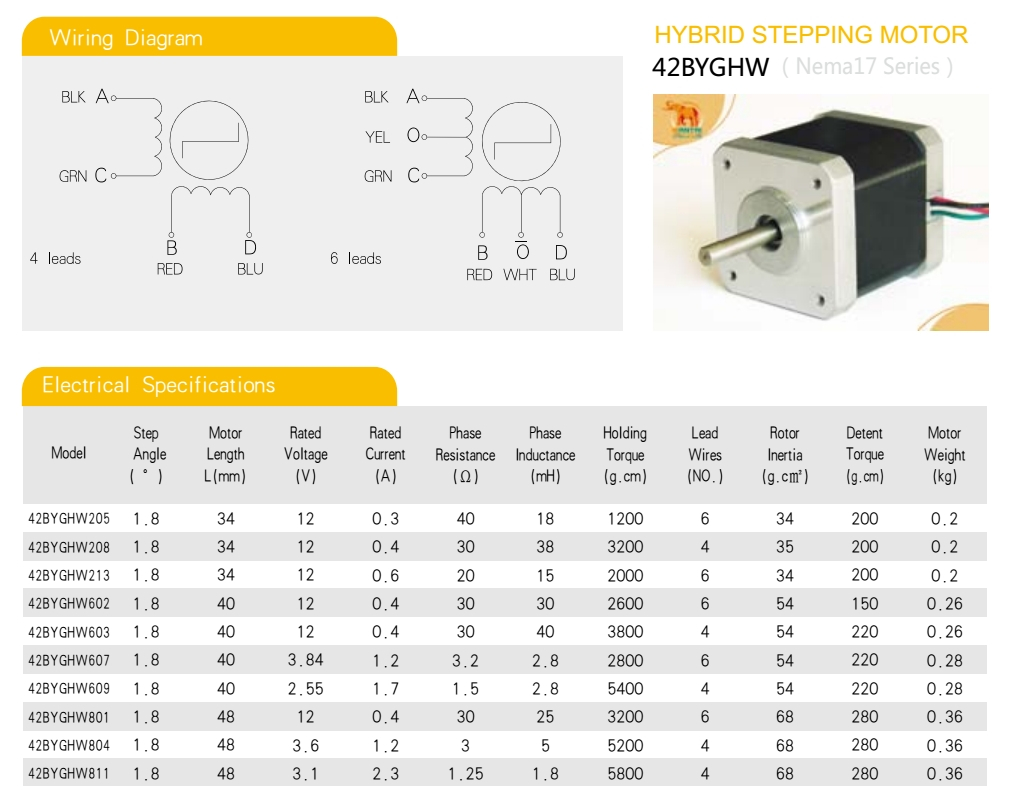
Основной параметр шаговых двигателей (ШД) это количество шагов на 1 оборот. Самое распространённое значение для ШД – 200 шагов на оборот (или 1,8 градуса на шаг). Мы будем использовать это разрешение во всех сегодняшних примерах. Более точную информацию можно узнать в описании к вашему шаговому двигателю. Зачастую 200 шагов на оборот, могут быть недостаточными для достижения необходимой точности. С целью повышения точности можно изменить передаточное число механически (использовать редуктор), а можно включить микрошаг – режим деления шага шагового двигателя, это увеличит число шагов на оборот, с коэффициентом 2n (n — целое число). Драйвер A4988 поддерживает деление шага: 1, 1/2, 1/4, 1/8, 1/16. Подробнее о драйвере A4988 читайте тут: Драйвер шагового двигателя A4988. Драйвер DRV8825 поддерживает деление шага: 1; 1/2; 1/4; 1/8; 1/16; 1/32. Подробнее о драйвере DRV8825 читайте тут: Драйвер шагового двигателя DRV8825.
Мы будем использовать это разрешение во всех сегодняшних примерах. Более точную информацию можно узнать в описании к вашему шаговому двигателю. Зачастую 200 шагов на оборот, могут быть недостаточными для достижения необходимой точности. С целью повышения точности можно изменить передаточное число механически (использовать редуктор), а можно включить микрошаг – режим деления шага шагового двигателя, это увеличит число шагов на оборот, с коэффициентом 2n (n — целое число). Драйвер A4988 поддерживает деление шага: 1, 1/2, 1/4, 1/8, 1/16. Подробнее о драйвере A4988 читайте тут: Драйвер шагового двигателя A4988. Драйвер DRV8825 поддерживает деление шага: 1; 1/2; 1/4; 1/8; 1/16; 1/32. Подробнее о драйвере DRV8825 читайте тут: Драйвер шагового двигателя DRV8825.
Давайте рассмотрим пример. Если мы выставим микрошаг 16, что является в 16 раз больше полного шага и в нашем примере даст 3200 (200х16) шагов на оборот.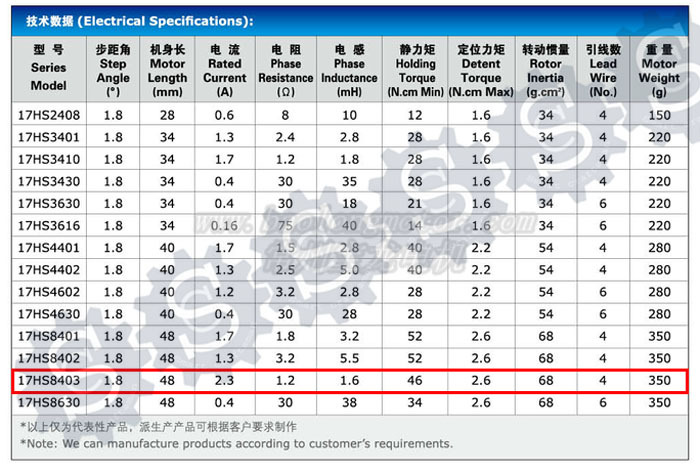 На первый взгляд это отличный результат и почему бы не использовать максимальное деление шага во всех станках. Но тут есть и минус – это падение крутящего момента при увеличении деления шага. Подробнее Микрошаг рассмотрим в следующей статье.
На первый взгляд это отличный результат и почему бы не использовать максимальное деление шага во всех станках. Но тут есть и минус – это падение крутящего момента при увеличении деления шага. Подробнее Микрошаг рассмотрим в следующей статье.
Расчёт винтовой передачи ЧПУ станка.
Винтовая передача ЧПУ, либо ее более продвинутый вариант шарико-винтовая передача (ШВП), являются наиболее часто используемым вариантом перевода вращательного движения вала шагового двигателя в линейное перемещение исполнительного механизма.
Для расчёта разрешения нам необходимо знать ШАГ винта, либо шаг винта ШВП. В описании трапецеидальных винтов обычно пишут Tr8x8,Tr10x2, первая цифра говорит нам о диаметре винта, вторая как раз о его шаге в мм. Винты ШВП обычно обозначаются 1204, 1605 и т.п. Первые 2 цифры – это диаметр винта, вторые две – это шаг в мм.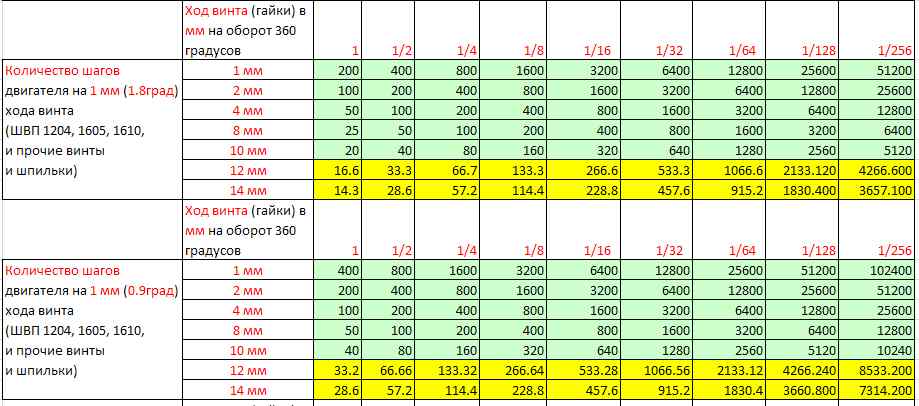 В 3d-принтерах обычно используют винт Tr8x8, диаметром 8 мм и с шагом 8 мм. Обзор моего 3d-принтера можно посмотреть тут:Обзор 3D принтера Anet A8. Сборка. Наладка.
В 3d-принтерах обычно используют винт Tr8x8, диаметром 8 мм и с шагом 8 мм. Обзор моего 3d-принтера можно посмотреть тут:Обзор 3D принтера Anet A8. Сборка. Наладка.
Формула расчета винтовой передачи ЧПУ получается следующей, в числителе – количество шагов на оборот, в знаменателе – перемещение за оборот.
Тп = Sшд*Fшд/Pр
где:
- Тп — точность перемещения, шаг/мм
- Sшд — количество шагов на оборот для двигателя (в наших примерах 200)
- Fшд — микрошаг (1, 2, 4, 8 и т. д.)
- Pр — шаг винта (например, 8 мм)
Рассчитаем пример со следующими параметрами, двигатель 200 шагов на оборот, с 4-кратным микрошагом, с трапецеидальным винтом Tr8x8 даст нам 100 шагов на мм.
200*4/8=100 шагов/мм.
Другими словами, для того чтобы ЧПУ станок переместился на 1 мм, нам нужно сделать 100 шагов двигателя.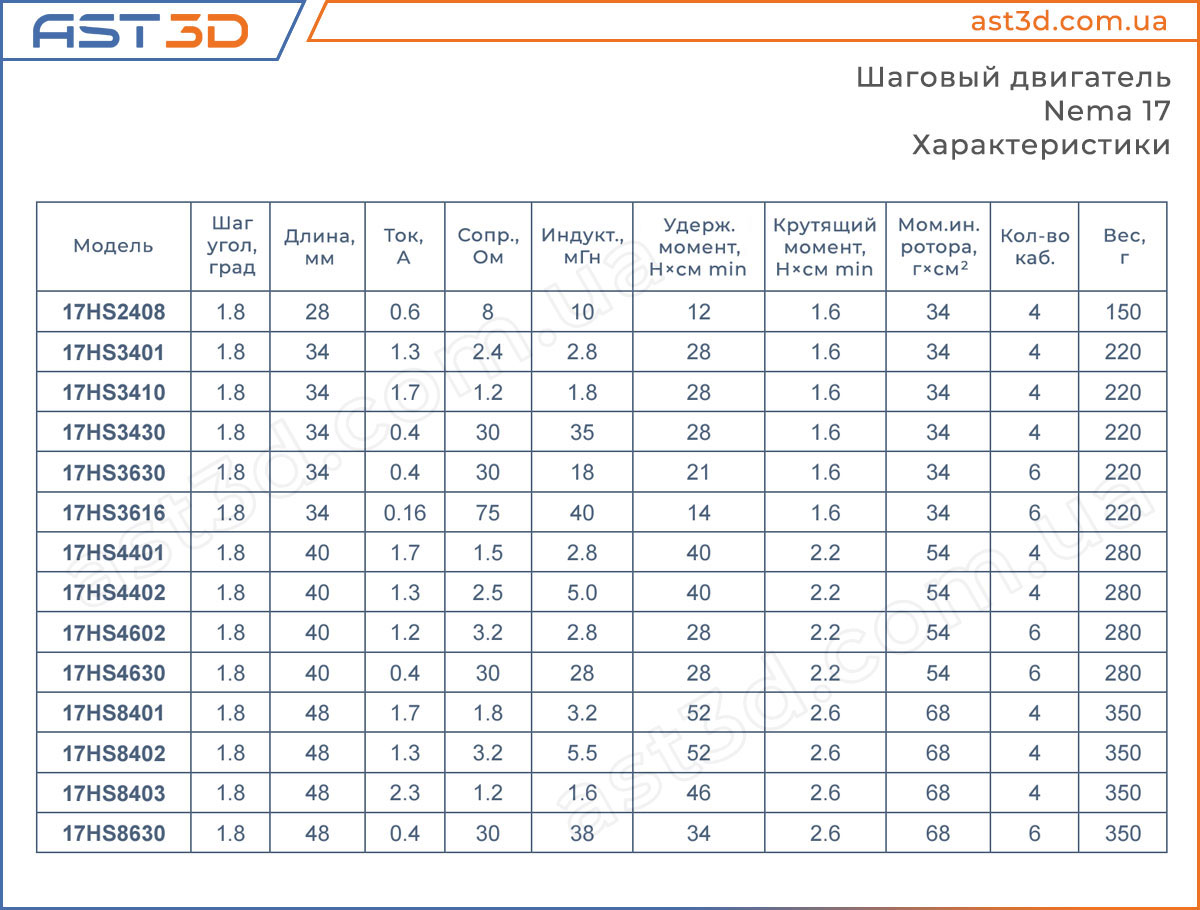 Что является неплохой точностью.
Что является неплохой точностью.
Расчетные значения нужно указать в прошивке GRBL:
$100=10.000 кол-во шагов на мм для оси Х $101=10.000 кол-во шагов на мм для оси Y $102=100.000 кол-во шагов на мм для оси Z $100=10.000 кол-во шагов на мм для оси Х $101=10.000 кол-во шагов на мм для оси Y $102=100.000 кол-во шагов на мм для оси Z
Расчет ременной передачи ЧПУ станка.
Во многих ЧПУ станках используются ремни и шкивы. Ремни и шкивы бывают разных форм и размеров, но одним из распространённых стандартов является GT2.
Следующие уравнение применимо для цепных и ременных передач, если вы введете правильный шаг. Обратите внимание, что эти уравнения не учитывают люфт.
Вот простое уравнение, которое вы можете использовать для расчета шагов на мм для линейного движения с ремнями и шкивами.
Тлп = Sшд*Fшд/Pр*Nшк
где:
- Тлп — точность линейного перемещения, шаг/мм
- Sшд — количество шагов на оборот для двигателя (в наших примерах 200)
- Fшд — микрошаг (1, 2, 4, 8 и т.
 д.)
д.) - Pр — шаг ремня (например, 2 мм)
- Nшк — количество зубьев на шкиве, на валу двигателя.
 д.)
д.)
Попробуем посчитать для примера с такими параметрами, двигатель 200 шагов на оборот, с 2-кратным микрошагом, 2-миллиметровыми ремнями GT2 и шкивом с 20 зубцами даст нам 10 шагов на мм.
200*2/2*20=10 шагов/мм.
Данный пример подойдет для расчета перемещения 3d-принтера. ЧПУ станков на ремнях: лазерный гравировальный, плоттер и пр.
Расчетные значения нужно указать в прошивке GRBL:
$100=10.000 кол-во шагов на мм для оси Х $101=10.000 кол-во шагов на мм для оси Y $102=100.000 кол-во шагов на мм для оси Z $100=10.000 кол-во шагов на мм для оси Х $101=10.000 кол-во шагов на мм для оси Y $102=100.000 кол-во шагов на мм для оси Z
Калибровка ЧПУ станка.

После настройки станка необходимо проверить точность перемещения станка по осям. Для этого нужно отправить команду на перемещение по оси, на относительно большое расстояние. Я чаще всего использую 100 мм. После чего произвести замер перемещения. Если значения не отличаются – это означает, что все работает верно. Но если расстояние перемещения больше или меньше, то нужно внести корректировку – провести калибровку ЧПУ станка. Для этого будем использовать формулу:
Тк = Тп * Kп / Kф
где:
- Тк – калибровочное значение, шаг/мм.
- Тп — точность перемещения, шаг/мм (из примера 100 шаг/мм)
- Kп — заданное значение для перемещения (в моем случае 100 мм.)
- Kф — фактически, на какое расстояние переместилась ось (допустим на 99 мм.)
Для примера проведем расчёт винтовой придачи, которую рассчитывали выше и выяснили, что нужно совершить 100 шагов для перемещения на 1 мм.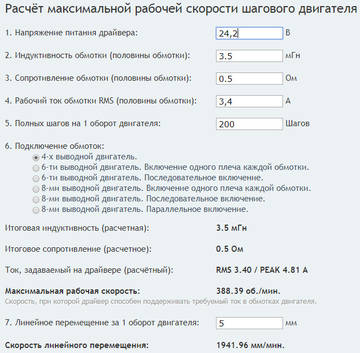 Также допустим, что мы отправили команду на перемещение станка на 100 мм, а по факту он переместился на 99 мм. Произведём расчет:
Также допустим, что мы отправили команду на перемещение станка на 100 мм, а по факту он переместился на 99 мм. Произведём расчет:
100*100/99=101,01 шагов/мм.
Указываем данное значение в прошивке GRBL и проводим калибровку еще раз. Если ЧПУ станок перемещается на заданное значение, можно пользоваться станком. Иначе проводим повторную калибровку.
Понравился статья Расчет и настройка ремённой и винтовой придачи ЧПУ станка. Калибровка! Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье
CNC: выбор шагового мотора | hobby.zigbee.ru
Столкнулся с тем, что моторы надо покупать, и покупать незнамо что совсем не хочется. Поэтому надо постараться хотя бы примерно определить, на что смотреть.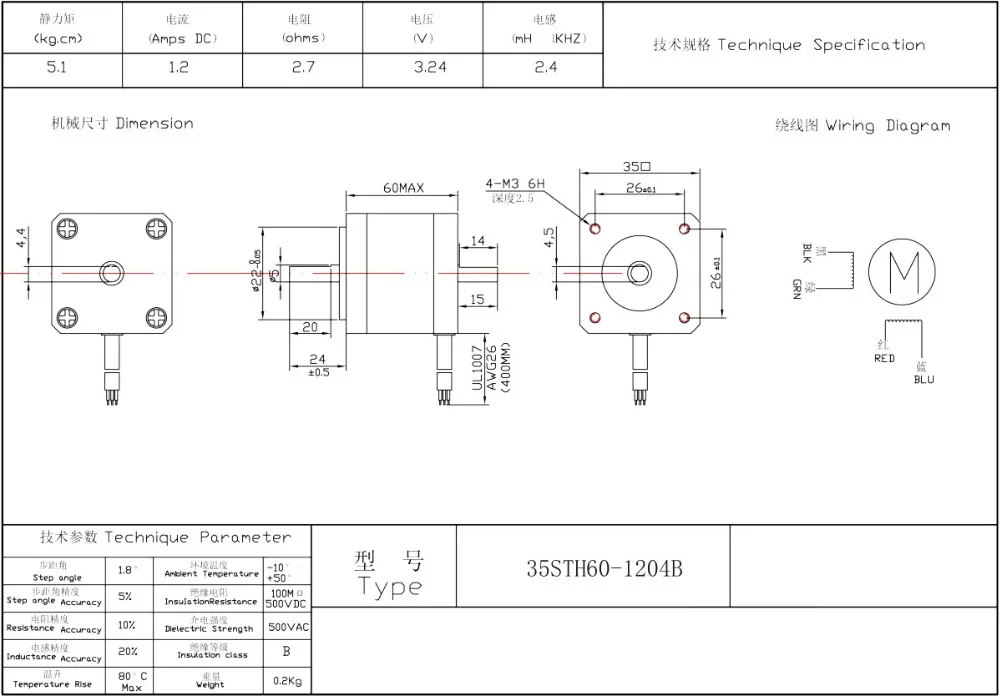 Всвязи с этим сохраняю здесь некоторые характеристики тех моторов, которые мне, вероятно, могли бы подойти.
Всвязи с этим сохраняю здесь некоторые характеристики тех моторов, которые мне, вероятно, могли бы подойти.
Расчёт максимальной скорости выполняю для 4-проводного включения и напряжения питания 36 вольт этим калькулятором.
Требуемый момент выбираю исходя из того, что на ШВП с шагом 5 мм момент 1.0Н*м превращается в усилие примерно в 120Кгс. А как рассчитать необходимое усилие, можно прочитать здесь. А вот ещё калькулятор обработки металлов.
Мегапонятный расчёт требуемых шаговиков. Скопипастю в конец страницы.
Ещё один пример расчёта.
| Тип мотора | Краткое описание | Момент | Phase inductance | Phase resistance | Working current RMS | Full step angle | Max working speed | |||||||||||||||||||||||||||||||||||||||||||
| 6018HB1401 | NEMA24, 60BYGH | 1.0N.m | 2.6mH | 1.0ohm | 2.8A | 1.8 | 944.44 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 6018HB1402 | NEMA24, 60BYGH | 1.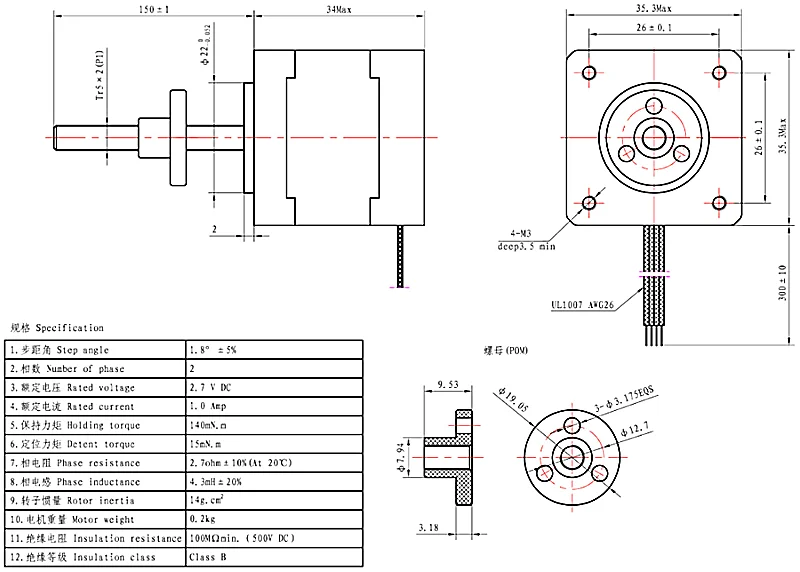 0N.m 0N.m | 1.3mH | 0.5ohm | 4.0A | 1.8 | 1074.30 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 6018HB5401 | 60BYGH, NEMA24 | 3.6N.m | 7.8mH | 2.1ohm | 2.8A | 1.8 | 314.81 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 6018HB5402 | 60BYGH, NEMA24 | 3.6N.m | 3.95mH | 1.07ohm | 4.0A | 1.8 | 435.16 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 60CM22X | 69mm | 2.2N.m | 1.9 | 0.6 | 4 | 1.8 | 904.67 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 60CM30X | 86mm | 3.0N.m | 3.3 | 0.5 | 5 | 1.8 | 416.70 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 6018HB4401 | NEMA24, 86mm | 3.1N.m | 7mH | 1,84Ом | 2.8A | 1.8 | 350.79 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 6018HB4402 | NEMA24, 86mm | 3.1N.m | 3.5mH | 0,93Ом | 4.0A | 1.8 | 491.11 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 8618HB6401 | NEMA32, 79.5mm | 4.00N.m | 15.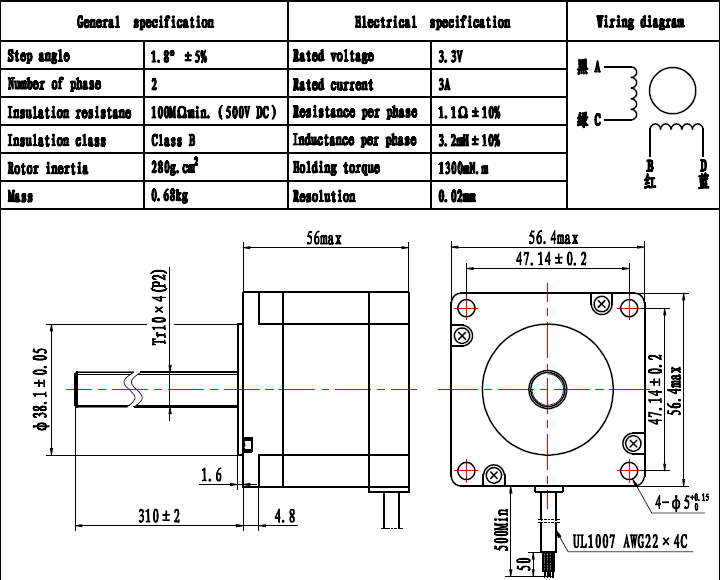 2mH 2mH | 1,6Ом | 6.0A | 1.8 | 75.39 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 8618HB6402 | NEMA32, 79.5mm | 4.00N.m | 3.8 | 0.4 | 3 | 1.8 | 603.11 RPM | |||||||||||||||||||||||||||||||||||||||||||
| JL60HS56-2008 | NEMA24, 56mm | 1.17 | 3.6 | 1.8 | 2 | 1.8 | 954.93 RPM | |||||||||||||||||||||||||||||||||||||||||||
| JL60HS56-2008 | NEMA24, 56mm | 1.65 | 3.6 | 0.9 | 2.8 | 1.8 | 682.09 RPM | |||||||||||||||||||||||||||||||||||||||||||
| JL60HS56-2008 | NEMA24, 56mm | 1.65 | 14.4 | 3.6 | 1.4 | 1.8 | 341.05 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 57HS11230B4D8 | Nema23 57x112mm double Shaft 8mm | 3 | 6.8 | 1.6 | 3 | 1.8 | 337.03 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 23HS45-4204D | 2.8Nm(425oz.in) | 3.8mH | 0.9ohms | 4.2A | 1.8 | 430.80 RPM | ||||||||||||||||||||||||||||||||||||||||||||
| 23HS45-3504S | 57x57mm 113mm | 3.0Nm | 5.0mH | 1. 2ohms 2ohms | 3.5A | 1.8 | 392.89 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 17HS4801 | 42*42*48mm | 0.59Nm | 3 | 1.4 | 2 | 1.8 | 1145.92 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 17hs4401 | 42*42*40, 42BYGH | 0.45 | 2.6 | 1.1 | 2 | 1.8 | 1322.21 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 57HS7630A4 | NEMA23, 78mm | 0.68 kg-cm 255oz-in | 1.6mH | 1.0 | 3 | 1.8 | 1432.39 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 57HS5630A4d6 | 57*56mm | 1.2Nm 172Oz-in | 2.4 | 0.8 | 3 | 1.8 | 954.93 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 86BYGH6401 | 79.5MM | 4 | 15.2 | 1.6 | 6 | 1.8 | 76.39 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 5718HB2401 | 57BYGh34 | 1.3N.m | 2.4mH | 0.8 | 3.5 | 1.8 | 818.51 RPM | |||||||||||||||||||||||||||||||||||||||||||
| 5718HB2402 | 1.3N.m | 4.7 | 1.5 | 2.5 | 1.8 | 585.15 RPM | ||||||||||||||||||||||||||||||||||||||||||||
| 5718HB2403 | 1. 2 2Момент требуемый чтобы крутить этот вал M= J * aw = 1047 * 0,0002636 = 0,276 Н*м Итого на валу требуется момент 0,51+0,276=0,79Н*м Ехать хотим со скоростью 8 м/мин, это 0,133 м/с, или 22,2 об/сек на валу Умерим апетиты до 3 м/мин Как считать шаги на мм Марлин? – Reviews WikiЧтобы найти текущие настройки шагов на мм для принтеров с прошивкой Marlin, перейдите на экран принтера и выберите Конфигурация/Дополнительно/Шагов на мм . Там вы увидите текущие настройки для осей Z, Y, X и E станка. Аналогично, как вы измеряете E шагов? Рассчитав свои E-шаги, вы сможете определить текущую точность экструдера и при необходимости внести коррективы для ее повышения.
Во-вторых Как калибровать шаги на мм? Как откалибровать 3D-принтер для точной печати
Сколько шагов на оборот в шаговом двигателе? Стандартные гибридные шаговые двигатели имеют 200 зубьев ротора, золото 200 полных шагов на один оборот вала двигателя. О чем говорит калибровочный куб? Калибровочные кубики — популярные тестовые отпечатки для 3D-принтеров. Это простые геометрические фигуры, обычно кубы, которые помогают вам точно настроить параметры вашего 3D-принтера, добиваясь максимальной точности и аккуратности. Как откалибровать микро m3d? Как рассчитать оборот на шаг? Например, для Trinamic Motion Control GmbH QSh5218-35-10-027 угол шага у него равен 1,8⁰. Таким образом, количество шагов на один оборот = 9. Как рассчитать количество шагов на единицу? Формула проста:
Как считать шаги на шаговом двигателе? Счетчик шагов Количество шагов на оборот варьируется от 4 400 до . Обычно доступны 24, 48 и 200 шагов. Разрешение часто выражается в градусах на шаг. Двигатель 1,8 ° такой же, как двигатель 200 шагов / оборотов. Как откалибровать шаги Z в Ender 3?Калибровка непосредственно с дисплея Ender 3 (прошивка)
Как откалибровать Е-шаги и расход? Как откалибровать шаги Z в Ender 5? На ЖК-экране управления перейдите к Control -> Motion -> Steps/mm . Нажмите ручку, чтобы выбрать ее, затем поверните ее, чтобы отрегулировать число, пока оно не совпадет с нашим новым значением шагов экструдера. Нажмите ручку еще раз, чтобы вернуться назад, и убедитесь, что это правильно. Что такое ореол в 3D-печати? Звон, иногда называемый ореолом или рябью, — это , когда линии или элементы на 3D-принтере кажутся повторяющимися по всей поверхности модели . Обычно это довольно тонко, отсюда и термин «двоение», но может легко испортить внешний вид превосходного отпечатка. Как набрать нить? Что такое шаги Z? Шаг Z (также известный как зигзаг) образует букву «Z», когда вы двигаетесь . Как считать шаги в секунду? Перевод каденса в частоту шагов прост – просто разделите на 60 ! 180 каденс — это 3 шага в секунду, 240 каденс — 4 шага в секунду, а 300 каденс — 5 шагов в секунду. У большинства спринтеров во время забегов частота шагов составляет от 3 до 5. Пример. Как рассчитывается угол шага? Угол шага шагового двигателя определяется как угол, который проходит двигатель за один шаг. Чтобы рассчитать угол шага, просто разделите 360 на количество шагов, которые двигатель делает для совершения одного оборота . … Угол шага ø = 360° / 4 = 90°, а в случае половинного режима угол шага становится вдвое меньше 45°. Как считать микрошаги? Микрошаговое управление делит каждый полный шаг на более мелкие шаги, чтобы помочь сгладить вращение двигателя, особенно на малых скоростях. Как рассчитать угол шага? Чтобы рассчитать угол шага, просто разделить 360 на количество шагов, за которые двигатель совершает один оборот . Как мы видели, в половинном режиме количество шагов, совершаемых двигателем для совершения одного оборота, удваивается, поэтому угол шага уменьшается вдвое. Что такое настройка шага шага? Уважаемый клиент, шаг шага относится к длине шага (расстоянию, которое вы проходите шаг) . … Мы предлагаем вам сделать 10 или более шагов по прямой линии, затем измерить пройденное расстояние и разделить его на количество пройденных вами шагов. Таким образом, вы можете получить точную длину шага. Что такое шаговый двигатель 42? Шаговый двигатель Nema 42 представляет собой шаговый двигатель с лицевой панелью 4,2 x 4,2 дюйма (110 x 110 мм). … Эти двигатели спроектированы так, чтобы обеспечить максимально возможный крутящий момент, но свести к минимуму вибрацию и слышимый шум. Что такое двухфазный шаговый двигатель?2-фазный шаговый двигатель — это гибридный шаговый двигатель с 2-фазным двигателем . Этот шаговый двигатель от STEPPERONLINE имеет следующие преимущества: Во-первых, это хорошая перегрузка. Скорость не зависит от размера груза. Шаговый двигатель предъявляет строгие требования к скорости и положению. Во-вторых, удобное управление. Сколько ступеней в биполярном шаговом двигателе? В отличие от униполярного шагового двигателя, биполярный шаговый двигатель имеет два провода на фазу , ни один из которых не является общим. Эффекты статического трения возникают при использовании H-моста с определенной топологией привода, однако его можно уменьшить, сглаживая сигнал шагового двигателя на более высокой частоте. Калькулятор RepRap — оригинальные 3D-принтеры Prusa Привет, я калькулятор. Я помогу вам рассчитать реальную цену филамента в пересчете на объем печати (в кубических сантиметрах), количество шагов на миллиметр и ускорение, необходимое для достижения определенной скорости печати. Реальная цена на нитьРАБОТА В ПРОГРЕССЕ! Отличный инструмент для сравнения реальной цены на нить. Единственное измерение, которое точно скажет вам, сколько вы можете напечатать с купленной нитью, это объем в см 3 . Продавцы нитей должны указывать цену за см 3 , чего сейчас не происходит. Поэтому я сделал этот простой инструмент для вас, чтобы вычислить его. Пример: Вам предлагают 100 м PLA толщиной 3 мм и 1,75 мм за 25 долларов. С 3 мм вы купите 2827 см 3 , а с 1,75 мм только 962 см 3 пластика. Это делает 1,75-миллиметровую сделку довольно ужасной, поскольку вы получите только одну треть по той же цене. Название нити Вес Длина Диаметр Предустановки диаметра Материал — задает плотность для расчетов Плотность Цена упаковки
Шаговые двигателиШагов на миллиметр — системы с ременным приводом Теоретически результат правильный, но вам может потребоваться откалибровать машину, чтобы получить мельчайшие детали. Если вам сложно пользоваться этим калькулятором, попробуйте задать на форуме ℹ шагов на мм. Угол шага двигателя Микрошаговый драйвер Шаг ремня (в мм) Предустановки ремня Количество зубьев шкива
Пример: M92 G-код позволяет установить количество шагов на миллиметр в режиме реального времени. M92 X0 Шагов на миллиметр — системы с ходовым винтомУказывает количество шагов, которые электроника должна произвести для перемещения оси на 1 мм. Если вам сложно пользоваться этим калькулятором, попробуйте задать на форуме ℹ шагов на мм. Угол шага двигателя Микрошаговый драйвер Шаг ходового винта мм/оборот Предустановки шага Передаточное отношение
Пример: M92 G-код позволяет установить количество шагов на миллиметр в режиме реального времени. M92 Z0 Оптимальная высота слоя для вашей оси ZПомогает вам выбрать высоту слоя таким образом, чтобы ось Z перемещалась только на полный шаг. Ось Z обычно не включается во время бездействия. Если ось отключена во время микрошага, ось переходит к ближайшему полному шагу и вызывает ошибку. Этот эффект в некоторой степени проявляется даже при включенных двигателях оси Z. Это наиболее полезно для машин с дюймовыми ходовыми винтами, а также для нестандартной высоты слоя с метрическими ходовыми винтами. Угол шага двигателя Требуемая высота слоя Шаг ходового винта мм/оборот Предустановки шага Передаточное отношение
УскорениеМаксимальная скорость Введите параметры ускорения, расстояние/длину оси, и вы увидите, что ваш принтер будет достигать желаемой скорости и как долго. |
 …
… Разделение 200 шагов на 360° вращения равно 1,8° полного угла шага. Обычно полношаговый режим достигается за счет подачи питания на обе обмотки с попеременным изменением направления тока.
Разделение 200 шагов на 360° вращения равно 1,8° полного угла шага. Обычно полношаговый режим достигается за счет подачи питания на обе обмотки с попеременным изменением направления тока. 0003 360 / 1,8 = 200 . Это фиксированное соотношение — все шаговые двигатели с шагом 1,8⁰ будут иметь 200 отдельных шагов.
0003 360 / 1,8 = 200 . Это фиксированное соотношение — все шаговые двигатели с шагом 1,8⁰ будут иметь 200 отдельных шагов.
 Встаньте на скамью, двигайтесь поперек, назад по диагонали и шагните поперек. В конечном итоге вы окажетесь в том же направлении, в стороне от того места, где вы начали. («Z» формируется счетами 3-8.)
Встаньте на скамью, двигайтесь поперек, назад по диагонали и шагните поперек. В конечном итоге вы окажетесь в том же направлении, в стороне от того места, где вы начали. («Z» формируется счетами 3-8.)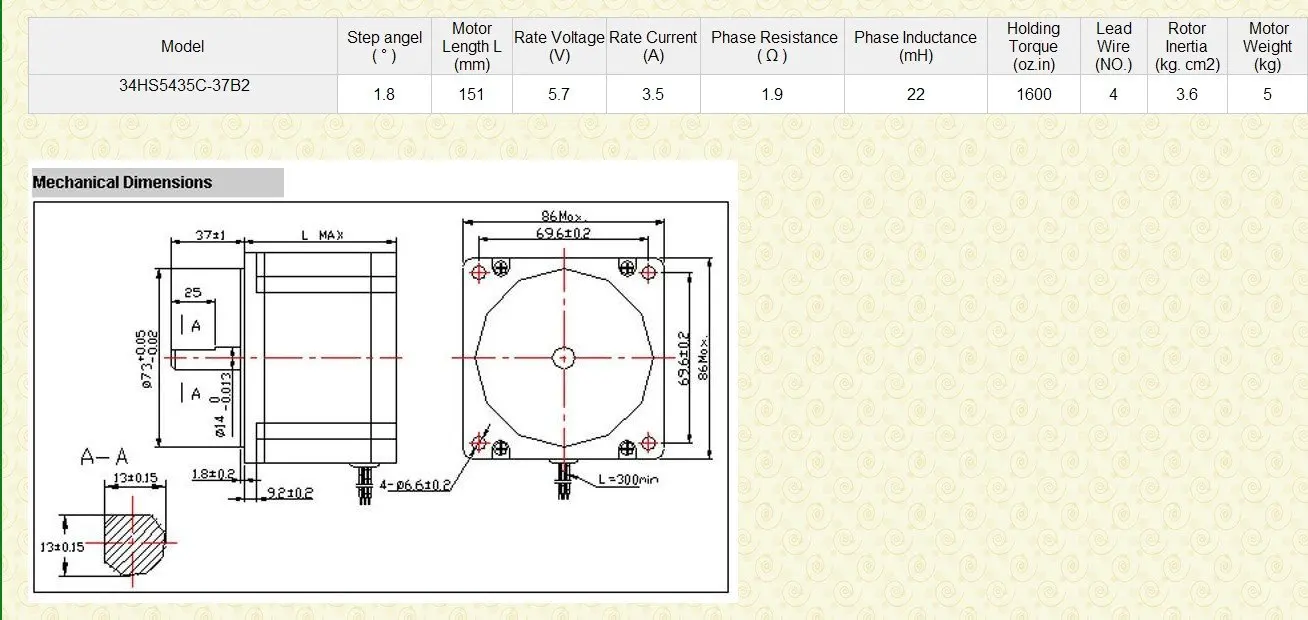 Например, шаг в 1,8 градуса можно разделить до 256 раз, обеспечив угол шага 0,007 градуса (1,8 ÷ 256), или 51 200 микрошагов на оборот.
Например, шаг в 1,8 градуса можно разделить до 256 раз, обеспечив угол шага 0,007 градуса (1,8 ÷ 256), или 51 200 микрошагов на оборот.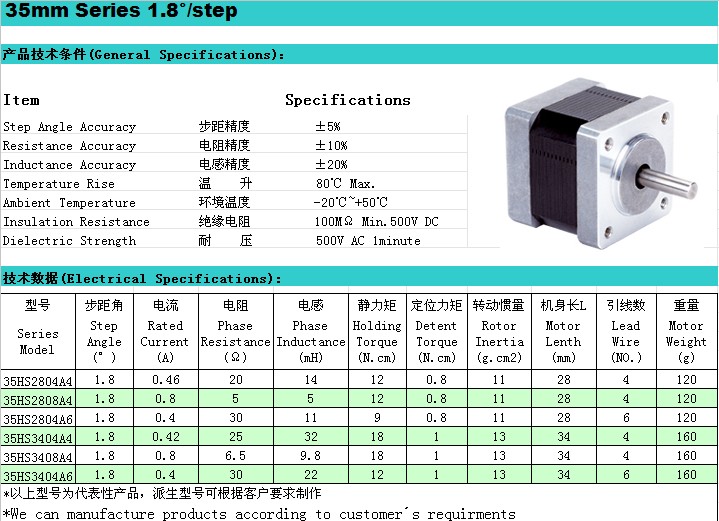

 Это хорошее начало.
Это хорошее начало. Вот пример с вашим результатом для оси X.
Вот пример с вашим результатом для оси X. Вот пример с вашим результатом для оси X.
Вот пример с вашим результатом для оси X.