Устройства и элементы систем автоматического регулирования и управления. Книга 3. Исполнительные устройства и сервомеханизмы
Устройства и элементы систем автоматического регулирования и управления. Книга 3. Исполнительные устройства и сервомеханизмы
Устройства и элементы систем автоматического регулирования и управления. Книга 3. Исполнительные устройства и сервомеханизмы
Устройства и элементы систем автоматического регулирования и управления. Техническая кибернетика. Книга 3. Исполнительные устройства и сервомеханизмы. Колл. авторов. Под ред. засл. деятеля науки и техники РСФСР, д-ра техн. наук проф. В. В. Солодовникова. М., «Машиностроение», 1976. 735 с.
Книга посвящена исполнительным устройствам и сервомеханизмам систем автоматического регулирования и управления и является последней из трех книг, в которых рассматриваются элементы и устройства этих систем. В книге описаны принципы работы, конструктивные особенности, статические и динамические характеристики исполнительных устройств. В ней приведен выбор исполнительных устройств, динамический и энергетический расчет линейных и нелинейных сервомеханизмов, а также дана оценка их свойств и надежности.
Оглавление
ПРЕДИСЛОВИЕ ВВЕДЕНИЕ РАЗДЕЛ I. ЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА И СЕРВОМЕХАНИЗМЫ ГЛАВА I. ОСНОВЫ ВЫБОРА И РАСЧЕТА ЭЛЕКТРИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ САР И САУ 1. КЛАССИФИКАЦИЯ И ВЫБОР ЭЛЕКТРИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ ЭЛЕМЕНТОВ, УСТРОЙСТВ И СЕРВОМЕХАНИЗМОВ 2. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ НАГРУЖЕННОГО ИСПОЛНИТЕЛЬНОГО ЭЛЕМЕНТА 3. ПРОЕКТИРОВАНИЕ СЕРВОМЕХАНИЗМОВ 4. ОСНОВЫ ДИНАМИЧЕСКОГО РАСЧЕТА И ИСПЫТАНИЕ СЕРВОМЕХАНИЗМОВ 5. АКТИВНЫЕ КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА СЕРВОМЕХАНИЗМОВ 6. СТРУКТУРНЫЕ СХЕМЫ И ОСНОВНЫЕ МЕТОДЫ РАСЧЕТА ЭЛЕКТРИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ 7. ОСОБЕННОСТИ РАБОТЫ СЛЕДЯЩЕГО ПРИВОДА ПРИ СУБКРИТИЧЕСКИХ СКОРОСТЯХ ИЗМЕНЕНИЯ ВХОДНОГО СИГНАЛА 8. НАДЕЖНОСТЬ ЭЛЕКТРИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВ ГЛАВА II. ЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА С ЭЛЕКТРОДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА 1. КЛАССИФИКАЦИЯ И ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ЭЛЕКТРОДВИГАТЕЛЯМ ПОСТОЯННОГО ТОКА 2. УПРАВЛЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА С НЕЗАВИСИМЫМ ВОЗБУЖДЕНИЕМ ОТ ЭЛЕКТРОМАШИННОГО УСИЛИТЕЛЯ 3. УПРАВЛЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА С НЕЗАВИСИМЫМ ВОЗБУЖДЕНИЕМ ОТ ПОЛУПРОВОДНИКОВОГО УСИЛИТЕЛЯ 4. УПРАВЛЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА ОТ ПОЛУПРОВОДНИКОВОГО УСИЛИТЕЛЯ ПУТЕМ ИЗМЕНЕНИЯ ПОТОКА ВОЗБУЖДЕНИЯ 5. УПРАВЛЕНИЕ СЕРИЕСНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА ОТ ПОЛУПРОВОДНИКОВОГО УСИЛИТЕЛЯ 6. ИМПУЛЬСНОЕ РЕГУЛИРОВАНИЕ СКОРОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА 7. ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА 8. БЕСКОЛЛЕКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА И ДВИГАТЕЛЬ С ПЛОСКИМ РОТОРОМ Электродвигатель постоянного тока с печатной обмоткой якоря. 9. ДВИГАТЕЛЬ-МАХОВИК ПОСТОЯННОГО ТОКА Электродвигатели постоянного тока с возбуждением от постоянных магнитов. 10. ДВИГАТЕЛЬ-МАХОВИК С БЕСКОЛЛЕКТОРНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА Бесколлекторный двигатель-маховик с датчиками Холла. Бесколлекторный двигатель-маховик с фотоэлектронной коммутацией. Бесколлекторный двигатель-маховик с индуктивным датчиком положения. ГЛАВА III. ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА С ДВУХФАЗНЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА 1. ПРИНЦИП ДЕЙСТВИЯ И КОНСТРУКЦИЯ ДВУХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ 2. УПРАВЛЕНИЕ ДВУХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ 3. СИСТЕМА ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 4. ВРАЩАЮЩИЙ МОМЕНТ ДВУХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ 5. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ 6. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ДВУХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ 7. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЯ 8. ПРОХОЖДЕНИЕ МОДУЛИРОВАННОГО ПО АМПЛИТУДЕ СИГНАЛА ПЕРЕМЕННОГО ТОКА ЧЕРЕЗ ЭЛЕМЕНТ, ИМЕЮЩИЙ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ G(s) 9. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ РАЗОМКНУТОЙ СИСТЕМЫ С ДВУХФАЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ДЛЯ ЛЮБЫХ G(s) 10. ЭЛЕКТРОДВИГАТЕЛИ – МАХОВИКИ ПЕРЕМЕННОГО ТОКА Электродвигатель-маховик с двухфазным асинхронным электродвигателем. Инерциальная сфера (шаровой электродвигатель-маховик) ГЛАВА IV. ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА С МНОГОФАЗНЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ ПЕРЕМЕННОГО ТОКА 1. КОНСТРУКЦИЯ И ПРИНЦИП ДЕЙСТВИЯ МНОГОФАЗНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ 2. ЧАСТОТНЫЙ И ЧАСТОТНО-ТОКОВЫЙ МЕТОДЫ УПРАВЛЕНИЯ 3. ПРИВОД ПЕРЕМЕННОГО ТОКА С ЧАСТОТНЫМ УПРАВЛЕНИЕМ 4. ПРИВОД ПЕРЕМЕННОГО ТОКА С ЧАСТОТНО-ТОКОВЫМ УПРАВЛЕНИЕМ 5. ПРИВОД С ЧАСТОТНО-ТОКОВЫМ УПРАВЛЕНИЕМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ Привод с питанием от одного источника тока. 6. ОСОБЕННОСТИ СХЕМ УПРАВЛЕНИЯ ПРИВОДОВ С ЧАСТОТНО-ТОКОВЫМ УПРАВЛЕНИЕМ 7. ПРЕОБРАЗОВАТЕЛИ ЭНЕРГИИ ПРИВОДОВ ПЕРЕМЕННОГО ТОКА Однофазный преобразователь на тиристорах. Статический трехфазный преобразователь. Преобразователь энергии на магнитных усилителях. 8. ОСНОВЫ СТАТИЧЕСКОГО И ДИНАМИЧЕСКОГО РАСЧЕТА ПРИВОДОВ ПЕРЕМЕННОГО ТОКА ГЛАВА V. ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА С ЭЛЕКТРОМАГНИТНЫМИ МУФТАМИ 2. СХЕМЫ УПРАВЛЕНИЯ МУФТАМИ 3. ДИНАМИЧЕСКИЕ И СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ 4. ОСНОВНЫЕ РАСЧЕТНЫЕ ЗАВИСИМОСТИ 5. ВЫБОР ПРИВОДНОГО ЭЛЕКТРОДВИГАТЕЛЯ 6. ПОКАЗАТЕЛИ КАЧЕСТВА ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ С ЭЛЕКТРОМАГНИТНЫМИ МУФТАМИ ГЛАВА VI. ЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА С ШАГОВЫМИ ДВИГАТЕЛЯМИ 1. ПРИНЦИП РАБОТЫ И ТИПЫ ШАГОВЫХ ДВИГАТЕЛЕЙ 2. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ, ОСНОВНЫЕ ПАРАМЕТРЫ И РЕЖИМЫ РАБОТЫ ШД 3. УСТРОЙСТВА УПРАВЛЕНИЯ ШД Схемы усилителей мощности с автоматическим регулированием тока фазы. 4. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ДИСКРЕТНОГО ПРИВОДА 5. ПРОГРАММИРОВАНИЕ ДИНАМИЧЕСКИХ РЕЖИМОВ ГЛАВА VII. МАГНИТНЫЕ ИСПОЛНИТЕЛЬНЫЕ ЭЛЕМЕНТЫ 1. МОДЕЛЬ ГЕОМАГНИТНОГО ПОЛЯ 2. МАГНИТНЫЕ УПРАВЛЯЮЩИЕ МОМЕНТЫ 3. ДИССИПАТИВНЫЕ МОМЕНТЫ 4. ПРИМЕРЫ ИСПОЛЬЗОВАНИЯ МАГНИТНЫХ ИСПОЛНИТЕЛЬНЫХ ЭЛЕМЕНТОВ РАЗДЕЛ II. ГИДРАВЛИЧЕСКИЕ И ПНЕВМАТИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА И СЕРВОМЕХАНИЗМЫ ГЛАВА VIII. ГИДРАВЛИЧЕСКИЕ И ПНЕВМАТИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА И СЕРВОМЕХАНИЗМЫ 2. АНАЛИТИЧЕСКИЕ И СТРУКТУРНЫЕ ПРЕДСТАВЛЕНИЯ ГИДРАВЛИЧЕСКИХ СЕРВОМЕХАНИЗМОВ 3. СЕРВОМЕХАНИЗМ КАК ЭЛЕМЕНТ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ 4. КОРРЕКЦИЯ ГИДРАВЛИЧЕСКИХ И ПНЕВМАТИЧЕСКИХ СЕРВОМЕХАНИЗМОВ 5. СЕРВОМЕХАНИЗМЫ ПОЛУАВТОМАТИЧЕСКИХ СИСТЕМ РЕГУЛИРОВАНИЯ 6. РАБОТА СЕРВОМЕХАНИЗМА В РЕЖИМЕ ВОСПРОИЗВЕДЕНИЯ УСИЛИЯ ИЛИ МОМЕНТА 7. РАБОТА СЕРВОМЕХАНИЗМА С ИЗМЕНЯЮЩЕЙСЯ ИНЕРЦИОННОЙ НАГРУЗКОЙ 8. КРИТИЧЕСКИЕ СООТНОШЕНИЯ ПАРАМЕТРОВ ГИДРАВЛИЧЕСКИХ И ПНЕВМАТИЧЕСКИХ НЕЛИНЕЙНЫХ СЕРВОМЕХАНИЗМОВ 9. ОЦЕНКА СВОЙСТВ ЭЛЕКТРОГИДРАВЛИЧЕСКИХ СЕРВОМЕХАНИЗМОВ 10. ЭКВИВАЛЕНТНОСТЬ ЭЛЕКТРОГИДРАВЛИЧЕСКИХ УСТРОЙСТВ УСИЛИТЕЛЬ – ИСПОЛНИТЕЛЬНЫЙ ДВИГАТЕЛЬ 11. НАДЕЖНОСТЬ ГИДРАВЛИЧЕСКИХ И ПНЕВМАТИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВ ГЛАВА IX. ГИДРАВЛИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА И СЕРВОМЕХАНИЗМЫ С ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ 1. ТИПОВЫЕ СХЕМЫ ГИДРАВЛИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ С ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ 2. ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО С ГИДРОУСИЛИТЕЛЕМ ДРОССЕЛЬ-СОПЛО – ЗАСЛОНКА 3. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ 4. СРАВНЕНИЕ СХЕМ ГИДРАВЛИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ 5. ИСПОЛЬЗОВАНИЕ НАСОСА С АВТОМАТОМ МОЩНОСТИ В ИСТОЧНИКЕ ПИТАНИЯ 6. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ 7. ДИНАМИКА ГИДРОПРИВОДА С ЧЕТЫРЕХЩЕЛЕВЫМ ЗОЛОТНИКОМ 8. РАСЧЕТ ДРОССЕЛЬНОГО ГИДРОПРИВОДА НА АНАЛОГОВЫХ ВЫЧИСЛИТЕЛЬНЫХ МАШИНАХ ГЛАВА X. ГИДРАВЛИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА С ОБЪЕМНЫМ УПРАВЛЕНИЕМ 2. ДЕФОРМАЦИЯ ЖИДКОСТИ 3. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ НАСОСОВ И ГИДРОМОТОРОВ 4. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГИДРОПРИВОДА 5. ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГЛАВА XI. ПНЕВМАТИЧЕСКИЕ И ГАЗОВЫЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА 1. КЛАССИФИКАЦИЯ ПНЕВМАТИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ 2. ДИАФРАГМЕННЫЕ ПНЕВМАТИЧЕСКИЕ ДВИГАТЕЛИ 3. ПОРШНЕВЫЕ ПНЕВМАТИЧЕСКИЕ ДВИГАТЕЛИ 4. ГАЗОМОТОРНЫЕ ПНЕВМАТИЧЕСКИЕ ДВИГАТЕЛИ 5. ТУРБИННЫЕ ПНЕВМАТИЧЕСКИЕ ДВИГАТЕЛИ 6. СТРУЙНО-РЕАКТИВНЫЕ ПНЕВМАТИЧЕСКИЕ ДВИГАТЕЛИ 7. ЭЛЕКТРОПНЕВМАТИЧЕСКИЕ КЛАПАНЫ 8. КОМБИНИРОВАННЫЕ ПНЕВМАТИЧЕСКИЕ ДВИГАТЕЛИ 9. ФУНКЦИОНАЛЬНЫЕ ВЗАИМОДЕЙСТВИЯ ОТДЕЛЬНЫХ ЭЛЕМЕНТОВ ПНЕВМАТИЧЕСКОГО ПРИВОДА 10. ПОЛНАЯ СИСТЕМА УРАВНЕНИЙ И СТРУКТУРНЫЕ СХЕМЫ ПНЕВМАТИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ ГЛАВА XII. МНОГОСТУПЕНЧАТЫЕ ПНЕВМАТИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА 2. ТЕОРЕТИЧЕСКИЙ ТЕРМОДИНАМИЧЕСКИЙ ПРОЦЕСС В РАБОЧЕМ ЦИЛИНДРЕ ПРИВОДА 3. МНОГОСТУПЕНЧАТЫЙ ПНЕВМАТИЧЕСКИЙ ПРИВОД 4. СРАВНИТЕЛЬНАЯ ОЦЕНКА ОДНОСТУПЕНЧАТОГО И МНОГОСТУПЕНЧАТОГО ПРОЦЕССОВ 5. ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД КАК МНОГОСТУПЕНЧАТАЯ СИСТЕМА 6. ОСОБЕННОСТИ И ХАРАКТЕРИСТИКИ МНОГОСТУПЕНЧАТОГО ПРИВОДА ГЛАВА XIII. РАБОТА ГИДРАВЛИЧЕСКОГО СЕРВОМЕХАНИЗМА НА НИЖНЕМ ПРЕДЕЛЕ ДИАПАЗОНА РЕГУЛИРОВАНИЯ 2. ПАРАМЕТРИЧЕСКИЕ КОЛЕБАНИЯ 3. СКАЧКООБРАЗНЫЙ РЕЗОНАНС И СУБГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ 4. АВТОКОЛЕБАНИЯ С МЯГКИМ ВОЗБУЖДЕНИЕМ 5. АВТОКОЛЕБАНИЯ С ЖЕСТКИМ ВОЗБУЖДЕНИЕМ 6. ВЫНУЖДЕННЫЕ СИММЕТРИЧНЫЕ КОЛЕБАНИЯ В ГИДРАВЛИЧЕСКОМ ПРИВОДЕ ГЛАВА XIV. ЭНЕРГЕТИЧЕСКИЙ РАСЧЕТ ГИДРАВЛИЧЕСКИХ И ПНЕВМАТИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ И СЕРВОМЕХАНИЗМОВ 1. ВЗАИМОДЕЙСТВИЕ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ С ИСТОЧНИКАМИ ЭНЕРГИИ 2. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГИДРАВЛИЧЕСКОГО ПРИВОДА 3. НАГРУЗОЧНЫЕ ХАРАКТЕРИСТИКИ 4. РАСЧЕТ ПРИВОДА С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ ГИДРОДВИГАТЕЛЯ С РЕГУЛИРУЕМЫМ ОБЪЕКТОМ 5. РАСЧЕТ ПРИВОДА С РЕДУКТОРОМ МЕЖДУ ГИДРОДВИГАТЕЛЕМ И РЕГУЛИРУЕМЫМ ОБЪЕКТОМ 6. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ЭНЕРГЕТИЧЕСКИХ ХАРАКТЕРИСТИК 7. НАГРУЗОЧНЫЕ ХАРАКТЕРИСТИКИ ГАЗОВЫХ ПРИВОДОВ 8. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ 9. ЭНЕРГЕТИЧЕСКИЙ РАСЧЕТ ГАЗОВОГО ПРИВОДА ГЛАВА XV. МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ И ОПОРЫ 2. ЗУБЧАТЫЕ ПЕРЕДАЧИ С ДИФФЕРЕНЦИАЛАМИ 3. ЧЕРВЯЧНЫЕ ПЕРЕДАЧИ 4. ВОЛНОВЫЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ 5. ФРИКЦИОННЫЕ ПЕРЕДАЧИ 6. ВИНТОВЫЕ ПЕРЕДАЧИ 7. КЛАССИФИКАЦИЯ И ХАРАКТЕРИСТИКИ ОПОР 8. ОПОРЫ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ БИБЛИОГРАФИЯ ПО РАЗДЕЛАМ КНИГИ
Что такое шаговый двигатель, его принцип работы и зачем он нужен?
Что такое шаговый двигатель?
Содержание статьи:
1 Что такое шаговый двигатель?
1. 1 Принцип работы шаговых двигателей
2 Преимущества и недостатки шаговых электродвигателей
Шаговый двигатель — это бесщёточный синхронный электродвигатель преобразующий электрическую энергию в механическую. Основное отличие шаговых электродвигателей от обычных, заключается в способе вращения «шагами», из-за чего и происходит данное название электродвигателя.
На сегодняшнее время шаговые двигатели широко используются в различной оргтехнике, автоматическом электроинструменте, в машиностроении и т. д., там, где требуется достаточно высокая точность позиционирования. Не меньшей популярностью пользуются шаговые двигатели и для изготовления самодельных ветрогенераторов.
О том, что такое шаговый двигатель и зачем он нужен, будет рассказано в данной статье строительного журнала samastroyka.ru.
Что такое шаговый двигатель?
Шаговый двигатель — это электромеханическое устройство способное преобразовывать электрический ток в дискретные (состоящие из отдельных частей) угловые перемещения ротора. Благодаря наличию в конструкции шаговых двигателей постоянного магнита, обмотка последнего способна к самовозбуждению, что позволяет использовать шаговый двигатель в качестве основного элемента ветрогенератора, который производит постоянный электрический ток от вращения лопастей под воздействием силы ветра.
Однако основное применение шаговые двигатели получили в машиностроении и в различной оргтехнике. Благодаря высокой точности и простой интеграции с посторонними приложениями цифрового управления, шаговые электродвигатели позволяют легко автоматизировать работу отдельных систем и узлов сложного устройства. Ну а отсутствие таких элементов в конструкции шагового двигателя как щетки, для передачи электроэнергии, сказывается в первую очередь на длительном сроке службы и его довольно продолжительном ресурсе.
Принцип работы шаговых двигателей
Конструкция шаговых двигателей устроена таким образом, что на статоре устройства расположено определенное количество обмоток управления, на которые последовательно подаётся напряжение. Такой подход в работе шаговых электродвигателей позволяет обеспечить дискретное изменение электрического поля внутри шагового электродвигателя и задать нужный угол перемещения оси ротора.
Существуют различные виды шаговых двигателей: однофазные, многофазные и двухфазные, с пассивным либо активным ротором. Для управления шаговым двигателем используется специальный электронный блок управления, который обеспечивает поступление на обмотки электродвигателя определенную последовательность импульсов в зависимости от фазности электродвигателя.
Преимущества и недостатки шаговых электродвигателей
Главным преимуществом шаговых двигателей, является высокая точность поворота ротора на заданный угол. Достичь такого показателя при использовании обычных щёточных электродвигателей попросту невозможно. Как следствие этому, шаговый двигатель — хорошая альтернатива сервоприводу, стоимость которого в разы выше.
Кроме того, неоспоримым преимуществом шаговых двигателей, является и их довольно продолжительный ресурс работы. Целесообразно заметить, что даже за внушительный срок эксплуатации, точность шагового двигателя падает совсем незначительно.
Что же касается недостатков шаговых двигателей, то связаны они, прежде всего с так называемым «проскальзыванием ротора» вследствие значительных нагрузок на вал электродвигателя. В большинстве случаев, избежать подобной проблемы помогает увеличение мощности шагового двигателя или установка специального датчика на своевременное обнаружение подобной проблемы.
Оценить статью и поделиться ссылкой:
Принцип работы шагового двигателя
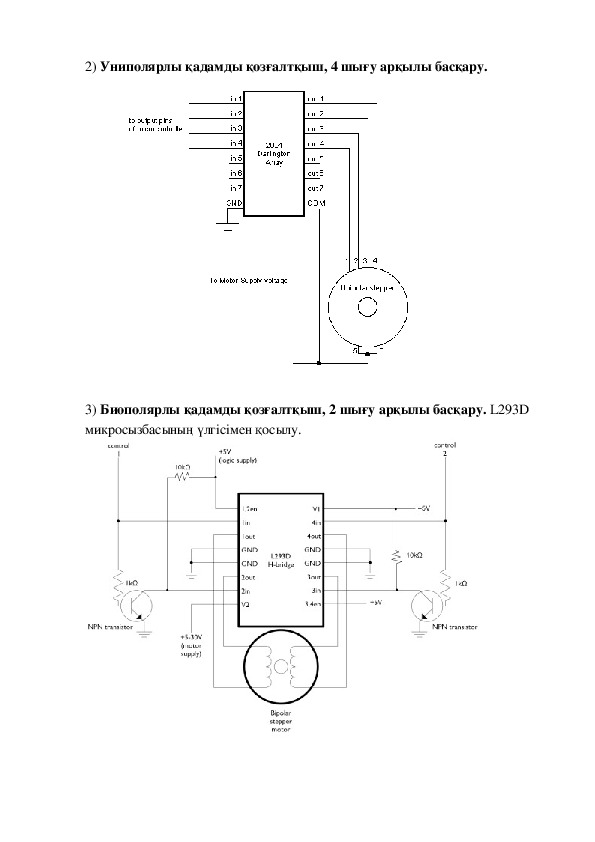
На этой странице я объясню принцип работы шагового двигателя. Существует много видов шаговых двигателей. Однополярный тип, биполярный тип, однофазный тип, многофазный тип… Однофазный шаговый двигатель часто используется в кварцевых часах. На этой странице я объясню принцип работы двухфазного униполярного шагового двигателя с постоянными магнитами.
В шаговом двигателе с постоянными магнитами в качестве ротора используется постоянный магнит, а на статор надеваются катушки. Модель шагового двигателя с 4 полюсами показана на рисунке слева. В случае этого двигателя угол шага ротора составляет 90 градусов.
Что касается четырех полюсов, то верхняя, нижняя и обе стороны составляют пару. катушка, катушка и катушка, катушка соответствуют соответственно. Например, катушку и катушку прикладывают к верхнему и нижнему полюсу. катушка и катушка свернуты для того, чтобы направление полюса стало противоположным при подаче электрического тока на катушку и подаче электрического тока на катушку. Аналогично про и , тоже. Вращение двигателя управляется электрическим током, который вливается в , , и . С помощью этого регулятора можно регулировать скорость вращения ротора и направление поворота.
Управление по часовой стрелке
, , и регулируются в следующем порядке.
Угол шага
0
1
0
1
0
1
0
0
1
90
1
0
1
0
180
0
1
1
0
270
«0» означает заземление.
Управление против часовой стрелки
, , и регулируются в следующем порядке.
Угол шага
0
1
0
1
0
0
1
1
0
-90
1
0
1
0
-180
1
0
0
1
-270
«0» означает заземление.
По рисунку видно, что ротор устойчив посередине 2-х полюсов статора. При изменении полярности одной стороны статора происходит отскок под действием магнетизма. В результате направление вращения ротора фиксируется.
Характеристика шагового двигателя заключается в правильном управлении углом и стабильном вращении (это связано с надежностью управляющего сигнала). Кроме того, поскольку ротор фиксируется магнетизмом в стационарном состоянии, как показано в принципе, стационарная мощность (стационарный крутящий момент) велика. Это подходит для остановки под некоторым углом.
Двигатель, который использовался на этот раз, имеет 48 шагов и угол шага 7,5 градусов. Способ управления полностью такой же, как и в предыдущем примере. Он работает при управлении электрическим током катушки, катушки, катушки и катушки. Случай управления по часовой стрелке показан ниже. Комбинация , , и повторяет четыре шаблона.
Угол шага
0
1
0
1
0,0
1
0
0
1
7,5
1
0
1
0
15,0
0
1
1
0
22,5
0
1
0
1
30,0
1
0
0
1
37,5
1
0
1
0
45,0
0
1
1
0
52,5
0
1
0
1
60,0
1
0
0
1
67,5
1
0
1
0
75,0
0
1
1
0
82,5
0
1
0
1
90,0
1
0
0
1
97,5
1
0
1
0
105,0
0
1
1
0
112,5
0
1
0
1
120,0
1
0
0
1
127,5
1
0
1
0
135,0
0
1
1
0
142,5
0
1
0
1
150,0
1
0
0
1
157,5
1
0
1
0
165,0
0
1
1
0
172,5
Угол шага
0
1
0
1
180,0
1
0
0
1
187,5
1
0
1
0
195,0
0
1
1
0
202,5
0
1
0
1
210,0
1
0
0
1
217,5
1
0
1
0
225,0
0
1
1
0
232,5
0
1
0
1
240,0
1
0
0
1
247,5
1
0
1
0
255,0
0
1
1
0
262,5
0
1
0
1
270,0
1
0
0
1
277,5
1
0
1
0
285,0
0
1
1
0
292,5
0
1
0
1
300,0
1
0
0
1
307,5
1
0
1
0
315,0
0
1
1
0
322,5
0
1
0
1
330,0
1
0
0
1
337,5
1
0
1
0
345,0
0
1
1
0
352,5
Основы шагового двигателя и принцип работы
Основы работы с шаговым двигателем Что такое шаговый двигатель? Шаговый двигатель представляет собой привод, преобразующий электрический импульс в угловое перемещение. Как правило, при получении импульсного сигнала шаговый двигатель поворачивается на фиксированный угол (а именно «угол шага») в соответствии с направлением, заданным для шагового двигателя. Объем углового смещения можно контролировать, контролируя число импульсов для достижения цели точного позиционирования. Между тем, скорость вращения и ускорение двигателя можно контролировать, контролируя частоту импульсов для достижения цели управления скоростью.
Принцип работы шагового двигателя Как работает шаговый двигатель? Ротор шагового двигателя представляет собой постоянный магнит, когда ток течет по обмотке статора, обмотка статора создает векторное магнитное поле. Магнитное поле заставляет ротор вращаться на угол, так что пара магнитных полей ротора и направление магнитного поля статора согласованы. Когда вектор магнитного поля статора поворачивается на угол, ротор также вращается с магнитным полем на угол. Каждый раз, когда подается электрический импульс, двигатель поворачивается на один градус дальше. Угловое смещение, которое он выдает, пропорционально количеству входных импульсов, а скорость пропорциональна частоте импульсов. Измените порядок мощности обмотки, двигатель будет двигаться в обратном направлении. Следовательно, он может управлять вращением шагового двигателя, контролируя количество импульсов, частоту и электрическую последовательность каждой фазной обмотки двигателя.
Типы шаговых двигателей Шаговые двигатели делятся на три типа: шаговые двигатели с постоянными магнитами (PM), шаговые двигатели с переменным сопротивлением (VR) и гибридные шаговые двигатели (HB).
Шаговый двигатель с постоянными магнитами обычно двухфазный, с небольшим крутящим моментом и объемом; его угол шага обычно составляет 7,5 ° или 15 °.
Шаговый двигатель
VR, как правило, трехфазный, может быть реализован высокий выходной крутящий момент; угол шага обычно 1,5, но шум и вибрация большие; магнитопровод ротора шагового двигателя VR выполнен из магнитомягких материалов. На роторе имеется многофазная обмотка возбуждения. Крутящий момент создается за счет изменения магнитной проводимости.
Шаговый двигатель
HB, указывающий на сочетание преимуществ PM и VR, делится на 2-фазный, 3-фазный и 5-фазный. Шаговый угол 2-фазного обычно составляет 1,8°, 3-фазного 1,2° и 5-фазного 0,72°. Он в основном широко применяется.
Выбор шагового двигателя
Угол шага: необходимо выбрать угол шага двигателя в соответствии с требованиями точности нагрузки. Наименьший коэффициент разрешения нагрузки обычно преобразуется в вал двигателя, обратите внимание на угол для каждого коэффициента разрешения, а угол шага двигателя должен быть равен или меньше угла. Как правило, угол шага 2-фазного мотор 0,9°/1,8°, 3-фазный 1,2° и 5-фазный 0,36°/0,72°. 2-фазный шаговый двигатель ATO имеет угол шага 1,8 градуса, а 3-фазный шаговый двигатель имеет угол шага 1,2 градуса.
 В книге описаны принципы работы, конструктивные особенности, статические и динамические характеристики исполнительных устройств. В ней приведен выбор исполнительных устройств, динамический и энергетический расчет линейных и нелинейных сервомеханизмов, а также дана оценка их свойств и надежности.
В книге описаны принципы работы, конструктивные особенности, статические и динамические характеристики исполнительных устройств. В ней приведен выбор исполнительных устройств, динамический и энергетический расчет линейных и нелинейных сервомеханизмов, а также дана оценка их свойств и надежности.
 НАДЕЖНОСТЬ ЭЛЕКТРИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВ
НАДЕЖНОСТЬ ЭЛЕКТРИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВ

 ОСНОВНЫЕ РАСЧЕТНЫЕ ЗАВИСИМОСТИ
ОСНОВНЫЕ РАСЧЕТНЫЕ ЗАВИСИМОСТИ СЕРВОМЕХАНИЗМ КАК ЭЛЕМЕНТ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
СЕРВОМЕХАНИЗМ КАК ЭЛЕМЕНТ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ИСПОЛЬЗОВАНИЕ НАСОСА С АВТОМАТОМ МОЩНОСТИ В ИСТОЧНИКЕ ПИТАНИЯ
ИСПОЛЬЗОВАНИЕ НАСОСА С АВТОМАТОМ МОЩНОСТИ В ИСТОЧНИКЕ ПИТАНИЯ ПОЛНАЯ СИСТЕМА УРАВНЕНИЙ И СТРУКТУРНЫЕ СХЕМЫ ПНЕВМАТИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ
ПОЛНАЯ СИСТЕМА УРАВНЕНИЙ И СТРУКТУРНЫЕ СХЕМЫ ПНЕВМАТИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГИДРАВЛИЧЕСКОГО ПРИВОДА
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГИДРАВЛИЧЕСКОГО ПРИВОДА 1 Принцип работы шаговых двигателей
1 Принцип работы шаговых двигателей 1 Принцип работы шаговых двигателей
1 Принцип работы шаговых двигателей Благодаря наличию в конструкции шаговых двигателей постоянного магнита, обмотка последнего способна к самовозбуждению, что позволяет использовать шаговый двигатель в качестве основного элемента ветрогенератора, который производит постоянный электрический ток от вращения лопастей под воздействием силы ветра.
Благодаря наличию в конструкции шаговых двигателей постоянного магнита, обмотка последнего способна к самовозбуждению, что позволяет использовать шаговый двигатель в качестве основного элемента ветрогенератора, который производит постоянный электрический ток от вращения лопастей под воздействием силы ветра. Такой подход в работе шаговых электродвигателей позволяет обеспечить дискретное изменение электрического поля внутри шагового электродвигателя и задать нужный угол перемещения оси ротора.
Такой подход в работе шаговых электродвигателей позволяет обеспечить дискретное изменение электрического поля внутри шагового электродвигателя и задать нужный угол перемещения оси ротора. Целесообразно заметить, что даже за внушительный срок эксплуатации, точность шагового двигателя падает совсем незначительно.
Целесообразно заметить, что даже за внушительный срок эксплуатации, точность шагового двигателя падает совсем незначительно. Модель шагового двигателя с 4 полюсами показана на рисунке слева. В случае этого двигателя угол шага ротора составляет 90 градусов.
Модель шагового двигателя с 4 полюсами показана на рисунке слева. В случае этого двигателя угол шага ротора составляет 90 градусов.
 Кроме того, поскольку ротор фиксируется магнетизмом в стационарном состоянии, как показано в принципе, стационарная мощность (стационарный крутящий момент) велика. Это подходит для остановки под некоторым углом.
Кроме того, поскольку ротор фиксируется магнетизмом в стационарном состоянии, как показано в принципе, стационарная мощность (стационарный крутящий момент) велика. Это подходит для остановки под некоторым углом. Как правило, при получении импульсного сигнала шаговый двигатель поворачивается на фиксированный угол (а именно «угол шага») в соответствии с направлением, заданным для шагового двигателя. Объем углового смещения можно контролировать, контролируя число импульсов для достижения цели точного позиционирования. Между тем, скорость вращения и ускорение двигателя можно контролировать, контролируя частоту импульсов для достижения цели управления скоростью.
Как правило, при получении импульсного сигнала шаговый двигатель поворачивается на фиксированный угол (а именно «угол шага») в соответствии с направлением, заданным для шагового двигателя. Объем углового смещения можно контролировать, контролируя число импульсов для достижения цели точного позиционирования. Между тем, скорость вращения и ускорение двигателя можно контролировать, контролируя частоту импульсов для достижения цели управления скоростью. Угловое смещение, которое он выдает, пропорционально количеству входных импульсов, а скорость пропорциональна частоте импульсов. Измените порядок мощности обмотки, двигатель будет двигаться в обратном направлении. Следовательно, он может управлять вращением шагового двигателя, контролируя количество импульсов, частоту и электрическую последовательность каждой фазной обмотки двигателя.
Угловое смещение, которое он выдает, пропорционально количеству входных импульсов, а скорость пропорциональна частоте импульсов. Измените порядок мощности обмотки, двигатель будет двигаться в обратном направлении. Следовательно, он может управлять вращением шагового двигателя, контролируя количество импульсов, частоту и электрическую последовательность каждой фазной обмотки двигателя. На роторе имеется многофазная обмотка возбуждения. Крутящий момент создается за счет изменения магнитной проводимости.
На роторе имеется многофазная обмотка возбуждения. Крутящий момент создается за счет изменения магнитной проводимости.