Содержание
В 80-х годах у Honda уже была система управления всеми колесами
Honda Prelude 4WS – модель с уникальной механической системой подруливания задних колес
Не зря 80-е годы стали для японских автопроизводителей золотой эпохой. Как только в США и Европе поняли, сколько можно получить с японцев уникальнейших технологий и разработок по демпинговым ценам, так сразу начали вкладывать деньги в японское инженерное дело. Механизм был запущен. Разработки шли одна невероятней другой, а ручеек инвестиций превратился в полноводную реку, наполнявшую все высокотехнологичные отрасли. Японцы, конечно же, тоже были не в накладе. Придумывали всякие необычные интересные штуковины и для внутреннего рынка. О странных разработках мы уже писали, например, в данном материале:
Зачем на японских автомобилях ставились боковые дворники?
Сегодня, правда, мы не будем освещать откровенно странные инженерные решения, а сфокусируем внимание на вполне пророческих. Например, система подруливания задних колес на модели Honda Prelude 4WS. Удивительна она тем, что впервые появилась в конце 80-годов, то есть лет за двадцать пять до того, как подобные варианты начали применяться в среде производителей гоночных автомобилей и люксовых спорткаров в Европе:
Например, система подруливания задних колес на модели Honda Prelude 4WS. Удивительна она тем, что впервые появилась в конце 80-годов, то есть лет за двадцать пять до того, как подобные варианты начали применяться в среде производителей гоночных автомобилей и люксовых спорткаров в Европе:
Несмотря на определенную архаичность (привод задних колес осуществлялся механическим способом) и невероятные по сегодняшним меркам углы поворота колес на задней оси, технология, реализация и ее история достойны, чтоб о них упомянуть.
Очень дорогая, непрактичная, но совершенно потрясающая технология 4WS.
«4WS» – аббревиатура, расшифровывающаяся как «4 wheels steering», то есть четыре управляемых колеса. Сегодня подобные системы производятся для нескольких целей: 1. Улучшение управляемости и стабильности автомобиля на скоростях; 2. Упрощение парковки.
Удивительно, но Хонда, разработав свою систему для третьего поколения модели Prelude в 87-м году, также преследовала аналогичные цели: с одной стороны – создать более комфортные условия для парковки автомобиля и облегчения маневрирования на узких, переполненных трафиком улочках (колеса задней оси поворачивались в противоположном направлении относительно передних). В этом помогали просто дичайшие углы поворота колес задней оси.
В этом помогали просто дичайшие углы поворота колес задней оси.
Забавно, что проблемы у пользователей спортивных купе Honda как раз и заключались в том, что при работе системы 4WS они не могли нормально припарковаться рядом с бордюром. Система оказывала медвежью услугу тем, что вы бы практически не смогли бы подъехать близко к бордюрному камню, а если каким-то чудом это и удалось бы сделать, отчалить восвояси также было бы непросто – автомобиль упирался задними повернутыми колесами в препятствие и упорно никуда не желал отъезжать.
С другой стороны, система делала скоростное прохождение поворотов безопаснее (поворачивая задние колеса в том же направлении, что и передние).
Здесь система работала подобно современным аналогам: на скорости задние колеса поворачивались в ту же сторону, что и передние, «ввинчивая» автомобиль в поворот, что уменьшало боковое смещение и снижало риск возникновения заноса.
Кстати, была и третья причина – вариативность отзывчивости автомобиля на рулежку. В медленном городском потоке машина вписывалась в поворот быстрее и за счет меньшего количество оборотов рулевого колеса, тогда как на шоссе рулежка не была излишне дерганной и резкой, подстраиваясь под нужды водителя.
В медленном городском потоке машина вписывалась в поворот быстрее и за счет меньшего количество оборотов рулевого колеса, тогда как на шоссе рулежка не была излишне дерганной и резкой, подстраиваясь под нужды водителя.
Смотрите также: Почему седаны почти никогда не имеют задних щеток стеклоочистителей
Увы, золотое время быстро прошло, а проблемы остались. Стоит обратить внимание, что, несмотря на достаточно надежную (насколько это возможно для столь изысканной вариации управления всеми колесами), относительно легкую и действительно «умную» конструкцию, главной ее проблемой оставалась высокая цена. В восьмидесятые оборудовать автомобиль подруливающими задними колесами с завода можно было за 1.500 долларов – очень дорогая плата за технологичность и уменьшение радиуса разворота:
Впрочем, люфты и требования к настройке схождения-развала тоже не прибавляли в копилку фанатов экзотики монет. Позже, в следующей итерации развития системы, к проблемам добавились выходящие из строя электронные датчики, следящие за соотношением углов поворота задних колес.
Как работала система подруливания колес Honda 4WS?
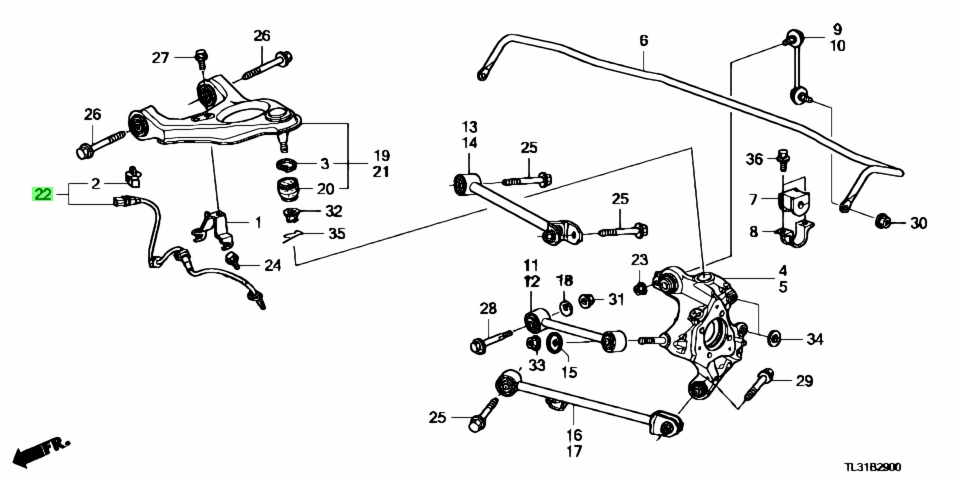
Что интересно, система была полностью механической, и внешне она больше всего напоминала систему полного привода. В компоненты входил вал привода (нечто похожее на небольшой карданный вал), который входил в коробку, по конституции напоминающую задний дифференциал на обычной заднеприводной машине. Из этой коробки выходили полуоси, а вернее валы отбора мощности, которые толкали задние рулевые тяги, шедшие непосредственно к колесам. Вот так вся эта машинерия управляла колесами задней оси.
Мало кто осознавал смысл всего этого в то время, поэтому, как только Япония потеряла свой «бесконечный» запас наличных денег для поддержания своих высокотехнологичных устремлений, экономический пузырь лопнул, и Страна восходящего солнца в 1991 году познала один из жесточайших экономических крахов со времен поражения во Второй мировой войне. Все это технологическое искушенное баловство быстро исчезло. Однако как все же прекрасно это было! Увы, сказка без счастливого конца.
|
Первые полноуправляемые версии, что появились
Применение систем управления всеми
Нынешняя система 4WS (4 Wheel
Работает система 4WS в
А при движении на большой скорости — в быстром вираже или при
| 4WS: Поворот задних колес в ту же сторону, что и передних,
позволяет сохранить направление и скорость движения центра масс автомобиля, но значительно увеличить мгновенный радиус поворота. При этом уменьшаются действующие на автомобиль боковые силы и, как следствие, повышается курсовая устойчивость |
 Вторая цель — улучшить маневренность автомобиля
Вторая цель — улучшить маневренность автомобиля
 То есть чувствительность рулевого управления
То есть чувствительность рулевого управления
Четырехколесные системы рулевого управления 1988 года
Из декабрьского номера журнала «Автомобиль и водитель» за 1987 год.
Немногие технические инновации захватили воображение автомобильной промышленности так же быстро, как рулевое управление всеми колесами. Хотя в концепции управления колесами с обеих сторон автомобиля нет ничего нового, ее развитие для серийных автомобилей не получило реального развития до 1983 года, когда Mazda представила свой шоу-кар MX-02. С тех пор такие машины мечты, как Corvette Indy, Pontiac Pursuit и Peugeot Proxima — действительно, большинство выставочных автомобилей, которые были чем-то большим, чем просто эксперименты по стилю, — также использовали рулевое управление четырьмя колесами.
Современное рулевое управление четырьмя колесами
- Celestiq станет флагманским электромобилем Cadillac
- Rolls-Royce показывает детали подвески Ghost блокировка тормозов, рулевое управление четырьмя колесами практически за одну ночь превратилось из диковинки шоу-кара в реальность массового производства. Прошлым летом Honda выиграла гонку за выход на рынок, представив Prelude Si 1988 года, для которого 4ws не является обязательным.
 Mazda почти сразу же последовала их примеру, выпустив дополнительный двигатель 4w для нового 626 Turbo. На подходе новые полноприводные модели от Nissan и Mitsubishi, а несколько других производителей в США и Европе, а также в Японии работают над собственными системами 4ws.
Mazda почти сразу же последовала их примеру, выпустив дополнительный двигатель 4w для нового 626 Turbo. На подходе новые полноприводные модели от Nissan и Mitsubishi, а несколько других производителей в США и Европе, а также в Японии работают над собственными системами 4ws.Спешка производителей к 4ws удивительна, учитывая тот факт, что до появления Prelude их клиенты не проявляли особого интереса к перспективе управления всеми четырьмя колесами. А почему они должны были? В отличие от турбонаддува, полного привода и АБС, преимущества которых легко понять, управление четырьмя колесами не является технологическим прорывом. Упомяните 4ws большинству людей, и вы получите пустые взгляды, если не смех, за которыми следуют саркастические вопросы о том, заставит ли это их машины ехать боком по дороге.
На самом деле, как хорошо известно производителям, управление четырьмя колесами имеет несколько важных потенциальных преимуществ. Каждая система 4ws, которую мы видели до сих пор, поворачивает передние и задние колеса автомобиля в противоположных направлениях в одних условиях и в одном и том же направлении в других случаях.
Рулевое управление в противоположном направлении делает поворот автомобиля более резким, улучшая его маневренность на малых скоростях и сокращая радиус поворота. Теоретически рулевое управление в одном направлении улучшает управляемость на более высоких скоростях. Чтобы понять почему, учтите, что передние шины обычно управляемого автомобиля развивают угловые усилия сразу же, когда ими управляют, а задние развивают угловые усилия только тогда, когда кузов автомобиля начинает поворачиваться. В отличие от этого, на автомобиле 4ws все четыре шины развивают свои усилия на поворотах одновременно. Результатом является более отзывчивая управляемость при переходных маневрах, таких как вход и выход из поворотов. Кроме того, поскольку задние шины автомобиля 4ws не зависят исключительно от угла сноса автомобиля при прохождении поворотов, хвост автомобиля не так сильно раскачивается в поворотах и не виляет так сильно при быстрой смене полосы движения. Эти преимущества особенно ярко проявляются на скользком покрытии, говорят сторонники 4ws.И Honda, и Mazda заявляют об этих преимуществах для своих систем 4ws, хотя они придумали совершенно разные способы добавления заднего рулевого управления в свои автомобили. Система Honda, более простая из двух, полностью механическая. Вал от передней реечной передачи приводит в движение задний рулевой редуктор, который поворачивает задние колеса в том же направлении, что и передние, когда рулевое колесо повернуто менее чем на 246 градусов от прямого направления, и в противоположном направлении после этого. точка. Поскольку поворот рулевого колеса более чем на 246 градусов от центра возможен только на очень низких скоростях, режим контрруления обычно используется только при маневрировании на парковке. Ни в том, ни в другом режиме задние колеса не очень сильно поворачиваются. Их максимальный угол поворота в одном направлении составляет 1,5 градуса, а максимальный угол поворота в противоположном направлении составляет 5,3 градуса.
Система Mazda работает по тому же принципу, но имеет гораздо более сложную конструкцию, в которой используются механические, гидравлические и электронные элементы для тщательной настройки переднего и заднего угла поворота рулевого колеса.
С помощью датчиков скорости и блока управления система настраивает свою работу не на угол поворота руля, а на скорость автомобиля. На скорости ниже 22 миль в час задние колеса поворачиваются противоположно передним до максимального угла в пять градусов. На скорости выше 22 миль в час они поворачиваются в том же направлении, что и передние колеса. Относительные углы поворота рулевого колеса и переход от противодействия рулевому управлению к рулевому управлению в одном направлении регулируются блоком управления системы. Полученные характеристики рулевого управления аналогичны характеристикам системы Honda, за одним важным исключением: в то время как рулевое колесо Prelude должно быть значительно повернуто, прежде чем начнется контрруление, 626 контррулит на низких скоростях всякий раз, когда его рулевое колесо перемещается от центра, независимо от того, насколько мал угол. . Таким образом, система Mazda обещает превосходную маневренность на низких скоростях.Конечно, принципы построения двух систем мало что говорят нам о том, как они работают на дороге.
Единственным неоспоримым преимуществом 4ws является улучшенная маневренность на парковке. Система Prelude уменьшает радиус поворота с 34,8 до 31,4 фута; соответствующие цифры для модели 626 составляют 38,0 и 36,1 фута.Чтобы изучить влияние 4ws на маневры на высоких скоростях, мы заказали модели Honda Prelude Si и Mazda 626 Turbo с двумя и четырьмя управляемыми колесами и наметили серию тестов на управляемость. В дополнение к трековым испытаниям в контролируемых пределах испытательного полигона Chrysler в Челси, штат Мичиган, мы должны были проехать четыре машины по дороге и отметить любые субъективные различия в управляемости. Нашей целью не было прямое сравнение спортивного Prelude и четырехдверной 626. Скорее, мы попытались обнаружить влияние четырехколесного управления, сравнивая Honda с Honda и Mazda с Mazda. В процессе также станут очевидными относительные достоинства подходов двух производителей к 4ws.
Для нашего тестирования было важно, чтобы версии 2ws и 4ws каждой модели были максимально похожи.
Единственная разница между двумя Prelude, которые мы заказали, заключалась в том, что у одного был пакет 4ws, который включает легкосплавные диски, дверные замки с электроприводом и тонированные под бронзу стекла. Обе машины были оснащены одинаковыми пружинами, амортизаторами, стабилизаторами поперечной устойчивости и шинами, хотя Honda указывает давление в шинах 28 фунтов на квадратный дюйм для всех моделей 4ws Prelude и на два фунта меньше для задних шин модели 2ws.К сожалению, для наших целей Mazda не предлагает модели 2ws и 4ws 626, которые были бы такими же равноценными, как две заказанные нами модели Prelude. Опция Mazda 4ws доступна только для четырехдверной модели 626 с турбонаддувом и автоматической коробкой передач. Тот же базовый автомобиль доступен с 2ws, но все 2ws 626 Turbo оснащены автоматической регулировкой подвески Mazda. В системе AAS используются трехпозиционные амортизаторы, и ни одна из настроек демпфирования не соответствует фиксированной калибровке, используемой на автомобиле 4ws.
Кроме того, пружины и стабилизаторы поперечной устойчивости, которые поставляются с AAS, мягче, чем оборудование, установленное на автомобиле 4ws. Чтобы максимально компенсировать эти более мягкие компоненты, мы установили систему AAS нашей Mazda 2ws в режим Sport Auto, который обеспечивает значительно более жесткое демпфирование, чем амортизаторы автомобиля 4ws. По крайней мере, колеса и шины двух заказанных нами автомобилей были идентичными.Наши тесты были сосредоточены на управляемости при переходных маневрах, поскольку 4ws не должен влиять на прямолинейное вождение или стабильное прохождение поворотов. Наиболее полезными тестами на переходную управляемость являются слалом и двойная смена полосы движения. В слаломном тесте необходимо как можно быстрее проехать серпантин через ряд равномерно расположенных конусов. При прочих равных лучше всего в этом тесте проявляют себя автомобили с плотным сцеплением с дорогой и стабильной реакцией на рулевое управление.
Наш тест с двойной сменой полосы движения требует быстрого переключения с одной полосы шириной двенадцать футов на другую, а затем обратно в точках, отмеченных конусами. Хорошие результаты в этом тесте требуют управляемости, а также быстрой и точной реакции рулевого управления во время двух крутых срезов. В обоих тестах мы меняли размеры трасс, чтобы изучить влияние 4ws на разные диапазоны скоростей. А поскольку говорят, что 4ws особенно полезен на скользких поверхностях, мы провели большую часть наших тестов как на сухом, так и на мокром асфальте.Характеристики на сухом покрытии
Хотя 4ws теоретически не влияет на управляемость в установившемся режиме, мы начали испытания на 300-футовой противоскользящей платформе Chrysler, чтобы посмотреть, как автомобили будут сравниваться по устойчивости на дороге. Honda были близки, а автомобиль 4ws имел преимущество, от 0,78 до 0,77 г. Мазды были распространены немного дальше: автомобиль 4ws весил 0,76 г, а модель 2ws — 0,74 г.
Учитывая более благоприятное распределение веса Mazda 4ws (благодаря заднему рулевому управлению) и в целом более жесткую подвеску, ее преимущество в противоскользящем покрытии неудивительно.Нашим первым кратковременным испытанием был очень медленный слалом, состоящий из одиннадцати конусов, расположенных на расстоянии всего 25 футов друг от друга. Наше намерение состояло в том, чтобы заставить автомобили двигаться с достаточно низкой скоростью, чтобы выявить эффект контрруления в моделях 4ws. Со скоростями в диапазоне от 12 до 13 миль в час мы, безусловно, преуспели; однако нам пришлось крутить руль так сильно, что ни одна из систем рулевого управления с гидроусилителем не могла за ним угнаться. В результате этот слалом оказался не более чем проверкой силы верхней части тела. Небольшая разница в скорости между двумя автомобилями Honda (см. график) указывает не более чем на относительную производительность их насосов гидроусилителя руля.
Honda Prelude Si, 2WS/4WS
Устойчивость к дороге, противоскользящая накладка диаметром 300 футов: 0,77/0,78 г
Расстояние между конусами 25 футов: 12,5/12,0 миль/ч Расстояние между конусами 100 футов: 62,0/62,0 миль/ч
Смена полосы движения, низкая скорость: 30,5/34,0 миль/час
Смена полосы движения, высокая скорость: 57,5/61,0 миль/часКогда мы увеличили расстояние между конусами до 50 футов, чтобы изучить эффект -направление 4ws, проблемы с усилителем руля исчезли, и наши тесты начали указывать на управляемость автомобилей.
Две «Хонды» развернулись с одинаковой скоростью — 31,5 мили в час. Оба резко повернули и продемонстрировали хороший контроль, хотя машине 4ws требовалось немного больше усилий на руле.Две Мазды были гораздо менее похожи. Автомобиль 2ws красиво развернулся и хорошо контролировал хвост, двигаясь по курсу со скоростью 32,0 миль в час. Автомобилю 4ws требовалось немного меньше движений руля, чем его собрату, но он страдал от небольшого эффекта двухступенчатой реакции на рулевое управление при переключении с одного направления на другое. Его скорость через конусы составляла всего 30,0 миль в час.
С конусами, расположенными на расстоянии 100 футов друг от друга, две Honda перестали быть похожими. 4ws Prelude прекрасно поворачивал и, казалось, обладал огромным сцеплением с обеих сторон автомобиля. Модель 2ws демонстрировала гораздо большее раскачивание хвоста и требовала значительно большей коррекции рулевого управления. Однако две итоговые строки были идентичными: обе Prelude преодолели курс со скоростью 62,0 мили в час.
Две Mazda поменялись местами в 100-футовом слаломе. Хотя у автомобиля 4ws все еще было подергивание в рулевом управлении, он проехал курс со скоростью 58,0 миль в час, что на 1 милю в час быстрее, чем автомобиль 2ws. Передний рулевой лучше чувствовал себя за рулем, но более мягкая подвеска ограничивала его скорость.
Подводя итог нашим результатам в сухом слаломе, можно сказать, что Honda 4ws была более управляемой, чем ее аналог 2ws, но не быстрее. Две Mazda также были примерно равны по скорости, более прямолинейное рулевое управление автомобиля 2ws компенсировало более мягкую подвеску.
Mazda 626 Turbo, 2WS/4WS
Сцепление с дорогой, противоскользящая накладка диаметром 300 футов: 0,74/0,76 г
Расстояние между конусами 25 футов: 13,0/13,0 миль/ч -футовое расстояние между конусами: 57,0/58,0 миль/ч
Смена полосы движения, низкая скорость: 32,5/32,5 миль/ч
Смена полосы движения, высокая скорость: 61,5/61,5 миль/чВ тесте с двойной сменой полосы мы снова начали с нижней границы спектра скоростей.
Наша первая трасса состояла из 25-футового сегмента для первой смены полосы движения, за которым следовал 50-футовый бег по прямой, а затем еще 25-футовый участок для возвращения на исходную полосу.4ws Prelude прошел этот курс значительно быстрее, чем модель 2ws, разогнавшись до скорости от 34,0 до 30,5 миль в час. Однако на пределе они не чувствовали себя очень разными. Автомобиль 4ws требовал большего усилия на руле и чувствовал себя несколько более устойчивым, но обе модели Prelude демонстрировали стабильную недостаточную поворачиваемость и хорошо контролировали свои хвосты.
Напротив, две Mazda вращались с одинаковой скоростью, 32,5 мили в час, но ощущались заметно разными. Автомобиль 2ws постоянно имел недостаточную поворачиваемость, и им было легко управлять. Автомобиль 4ws также имел недостаточную поворачиваемость, но его рулевое управление было гораздо менее плавным. Его насос гидроусилителя руля снова не мог справиться с внезапными движениями руля, необходимыми на трассе, что вызвало значительный всплеск усилия на руле, необходимого при смене полосы движения.
Для нашей высокоскоростной смены полосы движения мы удвоили длину всех трех участков трассы, увеличив длину каждого перекрестка до 50 футов, а длину прямого участка до 100 футов. Honda 4ws сохранила свое твердое преимущество в этом тесте, разогнавшись до 61,0 миль в час по сравнению с 57,5 миль в час для версии 2ws. Мало того, что Honda 4ws была быстрее, она также преодолела трассу с гораздо меньшим рывком. Виляющий хвост автомобиля 2ws было не особенно трудно контролировать, но он заставил нас усерднее работать на руле.
Две Mazda снова развернулись с одинаковой скоростью, на этот раз со скоростью 61,5 мили в час. Однако, как и в случае с Honda, модель 4ws была более легкой в управлении. У него меньший «рыбий хвост», чем у 2ws 626, и в целом он более мягкий, несмотря на небольшое отставание усилителя руля.
Наши результаты смены полосы движения лучше говорят о 4ws, чем наши результаты слалома, по крайней мере, в случае системы Honda.
Prelude 4ws был быстрее и более управляемым, чем модель 2ws. Действительно, разница в скорости была настолько велика, что вождение 4ws Prelude через двойную смену полосы движения на пределе возможностей автомобиля 2ws было практически без усилий. Напротив, система Mazda 4ws была неоднозначным благословением. Хотя 4ws 626 чувствовал себя лучше, чем автомобиль 2ws в скоростных переключениях, его отстающая система усилителя руля затрудняла управление. Что еще более важно, 4ws не улучшил скорость Mazda на трассах.Характеристики на мокрой дороге
Мы подумали, что заявленное преимущество 4ws в устойчивости будет более очевидным в наших тестах на мокрой дороге, поскольку любое такое преимущество следует преувеличивать на скользком асфальте. Поверхность Chrysler Jennite с низким коэффициентом трения, тщательно смачиваемая спринклерной системой, идеально подходила для наших целей, и мы повторили большинство наших сухих испытаний на ней. Мы не стали повторять 25-футовый слалом, потому что в этом упражнении больше проверялись системы рулевого управления с усилителем, чем их управляемость.
А поскольку поверхность Chrysler Jennite недостаточно велика для 300-футовой площадки, мы провели тест на устойчивость на мокрой дороге на круге, который мы обычно используем, с помощью сильного дождя.Наши результаты с мокрым тормозом оказались неожиданными. Управление четырьмя колесами не должно иметь значения на скользящей площадке, поскольку задействовано только устойчивое прохождение поворотов, но обе машины 4ws фактически уступили своим братьям и сестрам 2ws при переходе от сухого к мокрому тесту. Honda 4ws перешла от преимущества 0,01 г на сухом покрытии к отставанию в 0,03 г на мокрой дороге. Mazda 4ws потеряла свое преимущество в 0,02 g, сравняв с моделью 2ws. У нас нет объяснения этому сдвигу, но он сразу поставил под сомнение предполагаемые преимущества 4ws на скользкой поверхности.
Honda Prelude Si, 2WS/4WS
Устойчивость к дороге, противоскользящая накладка диаметром 300 футов: 0,76/0,73 г
Расстояние между конусами 50 футов: 24,0/24,0 миль/ч Смена полосы движения, низкая скорость: 28,0/27,0 миль/ч
Смена полосы движения, высокая скорость: 49,5/47,5 миль/чКогда мы перешли на трассу для слалома с интервалом 50 футов на мокром Дженните, мы снова не обнаружили преимущества для 4ws.
Две «Хонды» чувствовали себя почти одинаково на трассе и разгонялись с одинаковой скоростью — 24,0 мили в час. Mazda 2ws на самом деле была быстрее, чем модель 4ws, со скоростью от 24,5 до 23,0 миль в час. И хотя у обеих Mazda недостаточная поворачиваемость, у 4ws 626 недостаточная поворачиваемость больше. Мы также почувствовали, как его хвост немного покачивается на протяжении всей трассы, хотя это не оказало заметного влияния на его управляемость.Увеличение расстояния между конусами до 100 футов выявило большие различия между автомобилями. Honda 4ws чувствовала себя более уверенно, чем ее брат, держа хвост хорошо на линии, не демонстрируя чрезмерной недостаточной поворачиваемости. Автомобиль 2ws также был превосходно стабилен, но его хвост с большей вероятностью выходил из строя по мере достижения предела тяги автомобиля. Однако, несмотря на свои преимущества, 4ws Prelude не мог улучшить скорость автомобиля 2ws до 44,5 миль в час.
Напротив, Mazda 2ws снова значительно превосходила версию 4ws со скоростью от 42,5 до 40,5 миль в час.
Также стало намного лучше себя чувствовать. Хвост автомобиля 4ws был очень рыхлым и угрожающим, и нам было трудно сбросить лишнюю скорость, не боком. 2ws 626 тоже не чувствовал себя комфортно с вывернутым хвостом, но вероятность того, что он примет такое отношение, была гораздо ниже.Mazda 626, 2WS/4WS
Сцепление с дорогой, противоскользящая накладка диаметром 300 футов: 0,77/0,77 г
Расстояние между конусами 50 футов: 24,5/23,0 миль/ч , низкая скорость: 27,0/25,5 миль/ч
Смена полосы движения, высокая скорость: 46,0/46,0 миль/чАвтомобили 4ws не улучшили свои показатели на мокрой трассе смены полосы движения. Две «хонды» чувствовали себя очень похожими на трассе с низкой скоростью, демонстрируя устойчивую недостаточную поворачиваемость. Но модель 2ws разгонялась до 28,0 миль в час, что на 1,0 мили в час быстрее, чем ее брат 4ws.
Точно так же Mazda 2ws превзошла автомобиль 4ws со скоростью от 27,0 до 25,5 миль в час.
Автомобиль 2ws преодолел курс с немного меньшей недостаточной поворачиваемостью, хотя 4ws 626 чувствовал себя одинаково стабильно в других отношениях.При смене полосы движения на мокрой дороге на высокой скорости обе Honda чувствовали себя примерно одинаково, хотя автомобиль 2ws был немного более склонен к раскачиванию хвоста. Однако опять же, он также был быстрее, чем 4ws Prelude, со скоростью 49,5 миль в час против 47,5.
Mazda 4ws улучшила свои позиции в этом тесте, но лишь настолько, чтобы сравняться со своим братом 2ws на скорости 46,0 миль в час. И 2ws 626 чувствовал себя намного лучше, демонстрируя лишь умеренное хвостовое счастье. Автомобиль 4ws постоянно вилял хвостом, как бы аккуратно им ни управляли.
Несмотря на теоретические преимущества 4ws на скользком дорожном покрытии, обе машины 4ws в этом тесте были медленнее, чем их коллеги 2ws, в трех из пяти испытаний на мокрой дороге и не быстрее в остальных.
И хотя две Honda были примерно равны по управляемости, Mazda 4ws была явно менее стабильной, чем ее собрат в большинстве тестов.Заключение
Когда мы планировали этот тест, мы ожидали, что любые преимущества управляемости 4ws будут наиболее заметны на мокрой дороге. Вместо этого мы обнаружили прямо противоположное. 4ws Prelude показал себя лучше на сухом покрытии и хуже на мокрой, чем 2ws Prelude — не стоящий компромисс. И хотя наше сравнение двух Mazda несколько испорчено их разной калибровкой подвески, 4ws 626 ничуть не лучше, чем автомобиль 2ws на сухой дороге, и явно уступает на мокрой дороге. Мы можем только заключить, что в том виде, в каком она сейчас разрабатывается, ни системы Honda, ни Mazda не представляют собой значительного прогресса в технологии рулевого управления.
Эти новые системы рулевого управления тоже не продаются бесплатно. Пакет Honda 4ws добавляет 28 фунтов к снаряженной массе Prelude и 1300 долларов к его цене.
Система Mazda 4ws добавляет почти 100 фунтов к 626 и, с поправкой на различия в подвеске двух протестированных автомобилей, стоит около 1385 долларов. Обе системы действительно улучшают маневренность на низких скоростях, что ценно, но мы сомневаемся, что многие покупатели будут тратить столько денег только на то, чтобы упростить парковку.Означает ли это, что 4ws, в конце концов, не является значительным достижением в автомобильной технике? Единственный разумный ответ заключается в том, что еще слишком рано говорить. Помните, что системы Honda и Mazda — это первые серийные приложения того, что, по сути, является совершенно новой технологией. И точно так же, как подходы Honda и Mazda сильно различаются, другие производители обязательно разработают свои собственные уникальные подходы. Из двух систем, представленных на данный момент, конструкция Honda является более успешной. Он стоит и весит меньше, намного проще и дает несколько очевидных преимуществ. Но и она, и система Mazda требуют дальнейшей доработки, если они хотят реализовать свой потенциал.
Мы по-прежнему надеемся, что рано или поздно 4ws оправдает свое обещание. Honda и Mazda заслуживают признания как первопроходцы, но, по крайней мере, на данный момент 4ws не является большим скачком вперед.4ws на дороге
Вождение автомобиля на испытательном треке — лучший способ определить его абсолютные характеристики, но вождение в реальном мире не менее важно для тщательной оценки. Когда кто-то изо всех сил пытается избежать хруста пилонов, мелькающих назад по обеим сторонам, легко упустить из виду тонкости, которые могут иметь решающее значение в повседневном вождении. Чтобы убедиться, что мы ничего не упустили из виду при изучении рулевого управления четырьмя колесами, большинство наших сотрудников проехали все четыре машины в этом тесте по дорогам общего пользования недалеко от наших офисов в Анн-Арборе. Каждый сотрудник водил машины спина к спине, поощрялось как обычное вождение, так и жесткая порка, а некоторые сотрудники ездили и в дождь, и в сияющую погоду.
Наша цель, как и при тестировании на треке, состояла в том, чтобы увидеть, какие различия мы можем обнаружить между автомобилями 4ws и 2ws.Сравнение Prelude Si и купе
- Испытано: Honda Prelude SH 1997 года изящно развивается
- Испытано: Hot Coupe Comparo 1993 года
Мы приложили невероятные усилия, чтобы каждый водитель-испытатель мог объективно оценить управляемость автомобиля. Во-первых, мы заклеили идентификационные этикетки на автомобилях 4ws и соответствующие места на двух других. Во-вторых, поскольку пакет Honda 4ws включает в себя характерные легкосплавные диски, мы заменили два колеса и шины от 4ws Prelude комплектом от автомобиля 2ws. Наконец, мы попросили наших водителей-испытателей избегать крутых маневров на низких скоростях, потому что более крутые поворотные способности автомобилей 4ws быстро определят их. Только после того, как водители закончили свои поездки с четырьмя автомобилями и сообщили о своих выводах, им разрешили играть на нашей стоянке.
Большинству тестировщиков пришлось сильно сконцентрироваться, чтобы обнаружить хоть какую-то разницу между двумя автомобилями Honda. На самом деле, один сотрудник, который ошибочно думал, что знает, какой Prelude имеет 4ws (автомобили были окрашены в разные цвета), завершил свои поездки на обеих Honda, не осознавая своей ошибки.
Хотя некоторые водители заметили, что 2ws Prelude демонстрирует большую избыточную поворачиваемость, чем автомобиль 4ws, большинство из нас обнаружили, что усилие на рулевом колесе является наиболее очевидным различием между ними. У 2ws Prelude восхитительно плавное рулевое управление с очень линейным нарастанием усилия при вращении руля от центра. Автомобиль 4ws рулится почти так же хорошо, но требует немного больше усилий. Он кажется более липким, как будто у него больше механизмов для движения — что, конечно же, так и есть. Учитывая отсутствие других различий между двумя автомобилями, наши водители единогласно отдали предпочтение 2ws Prelude.
Различить Mazda стало намного проще. Каждый сотрудник заметил, что рулевое управление автомобиля 4ws было намного легче, чем у автомобиля 2ws. В 4ws 626 руль смещается от центра почти без сопротивления, и усилие едва увеличивается при дальнейшем повороте руля. Напротив, автомобиль 2ws имеет положительную выемку в центре, и его усилие на рулевом колесе сильно возрастает, когда он входит в поворот. Разница в усилии на рулевом колесе между двумя автомобилями Mazda в пять или десять раз больше, чем между двумя автомобилями Honda.
Две модели Mazda также ощущались нашими тестировщиками очень по-разному из-за сидений их штанов. Автомобиль 4ws меняет направление с такой готовностью, что автомобиль 2ws кажется почти вялым; определенно чувствуется что-то особенное в том, как он входит в поворот всеми четырьмя шинами одновременно. Тем не менее, большинство сотрудников расценили такое поведение как нервозность. В сочетании с легким усилием рулевого управления стремление Mazda 4ws поворачивать делало ее слишком нервной на прямой, особенно на высоких скоростях.
Никто не считал автомобиль 4ws нестабильным, но он не двигался так уверенно, как его собрат 2ws. Даже в поворотах сочетание легкого руля и резких поворотов давало слишком мало ощущения дороги большинству наших тестеров. По общему признанию, это впечатление, вероятно, со временем исчезнет.На нашей стоянке наши испытатели не могли ничего, кроме похвалы, за более крутые повороты обеих машин 4ws. Хотя улучшения по сравнению с версиями 2ws выглядят скромно на бумаге, они способствуют заметно лучшей маневренности. В автомобиле 4ws можно с удивительной легкостью въезжать на парковочные места и объезжать узкие повороты.
Но достаточно ли этого? Улучшенная маневренность на низких скоростях может быть полезной на узких дорогах Японии, но вряд ли она необходима в Америке. В отсутствие других значительных улучшений управляемости все водители-испытатели чувствовали себя разочарованными системами 4ws как Honda, так и Mazda.
Как выразился один испытатель: «Управление всеми четырьмя колесами крутит эту дополнительную пару колес гораздо сильнее, чем голову».
—Csaba CsereСтрелка внизСтрелка вниз
Технические характеристики
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
1988 Honda Prelude Si
АВТОМОБИЛЬ 9041 , передний привод, 5-местный, 2-дверное купе
ЦЕНА ПРИ ИСПЫТАНИЯХ (2WS/4WS)
16 864 $/18 164 $ТИП ДВИГАТЕЛЯ
DOHC 2,0-литровый 16-клапанный рядный 4-цилиндровый двигатель
Мощность
135 л.с. при 6200 об/мин Подвеска (передняя/правая): рычагов подвески/ multilink
Шины: Michelin MXV, 195/60HR-14РАЗМЕРЫ
Собственная масса (2WS/4WS): 2656 фунтов/2684 фунтовTurbo
19688 Mazda
ТИП АВТОМОБИЛЯ
передний -двигатель, передний привод, 5-местный, 4-дверный седанЦЕНА ПРИ ИСПЫТАНИЯХ (2WS/4WS)
17 867 долл. США/18 207 долл. СШАТИП ДВИГАТЕЛЯ
2,2-литровый DOHC с турбонаддувом, 16-клапанный рядный 4Мощность 9000 145 л.с. при 4300 об/мин
ТРАНСМИССИЯ
4-ступенчатая автоматическаяШАССИ
Подвеска (передняя/задняя): стойки/стойки
046 Снаряженная масса (2WS/4WS) : 2946 фунтов/3038 фунтовЧаба Чере
Ответственный редактор
Чаба Чере присоединился к Car and Driver в 1980 году и никогда не покидал его. После работы в качестве технического редактора и директора он был главным редактором с 1993 года до выхода на пенсию в 2008 году. Он продолжает заниматься автомобильной журналистикой и гонками LeMons, а также обслуживает свой Jaguar E-type 1965 года выпуска 2017 года. Porsche 911 и три мотоцикла — когда он не катается на лыжах или ходит пешком возле своего дома в Колорадо.
Прояснение системы управления четырьмя колесами
Некоторое время в конце 80-х управление четырьмя колесами казалось следующей большой вещью.
К концу 90-х он почти исчез, но за последнее десятилетие 4WS снова появился на моделях Nissan, Renault, BMW, Acura и даже Porsche.Поскольку 4WS явно возвращается, давайте проясним некоторые заблуждения о его первых днях.
4WS был таким 80-м
Хотя первые серийные автомобильные системы для него появились только в 80-х, управление автомобилем с обеих сторон для большей маневренности устарело. Самосвалы с задним рулевым управлением на самом деле появились раньше, чем сам автомобиль, а инженеры экспериментировали с четырехколесным рулевым управлением для легковых автомобилей еще в 19-м веке.30 с.
Ось Weissach от Porsche 928 была важным предшественником 4WS. Большинство серийных автомобилей испытывают некоторые изменения схождения задних колес при прохождении поворотов из-за сжатия или отклонения резиновых втулок подвески; это называется подруливающим управлением и может вызвать избыточную поворачиваемость при резких изменениях положения дроссельной заслонки.
Чтобы бороться с этой тенденцией, Porsche расположил втулки задней подвески 928 таким образом, чтобы задние колеса сгибались внутрь (а не наружу), если дроссельная заслонка была закрыта. Это пассивное заднее рулевое управление позже стало обычным явлением — его использовали Citroën, Isuzu, Mazda и другие.
Первые автомобили 4WS
Prelude был первым активным автомобилем 4WS, проданным в США, но Nissan R31 Skyline для японского рынка появился раньше, выпущенный в конце 1985 года.
Заднеприводный Skyline предлагал первый автомобиль Nissan Высокопроизводительная активно управляемая система подвески нового поколения. Как и ось Weissach от Porsche, первоначальная цель HICAS заключалась в том, чтобы смягчить подруливание на мощных автомобилях с задним приводом.
Компания Nissan признала ограничение пассивного управления задними колесами — его зависимость от нагрузок на поворотах. Они не обязательно строятся достаточно быстро, чтобы обеспечить полезную регулировку носка.
Решение Nissan состояло в том, чтобы использовать управляемые компьютером гидравлические поршни для выборочного сжатия сайлентблоков заднего подрамника Skyline, эффективно управляя задними продольными рычагами плюс/минус 0,5 градуса для повышения устойчивости при маневрах на высокой скорости.Ранние системы работали одинаково
На протяжении 80-х годов японские автопроизводители стремились запатентовать область 4WS, что привело к созданию нескольких различных производственных систем:
все механическое, с использованием вала для соединения передней рулевой рейки с ползунком, управляющим задними рулевыми тягами. Планетарная коробка передач определяла угол поворота заднего колеса в зависимости от угла поворота рулевого колеса. При малых углах задние колеса поворачивались бы на 1,5 градуса синхронно с передними, но при больших углах (более 246 градусов поворота рулевого колеса) задние колеса поворачивались бы на 5,3 градуса против передних, уменьшая радиус поворота.
около 10 процентов.Mazda 4WS, представленная на Capella/626/MX-6 (см. стр. 15) всего через несколько недель после Prelude, была более сложной и тяжелой, с использованием заднего рулевого вала для передачи угла поворота рулевого колеса на гидравлический привод и расчета задней электронное управление углом схождения в зависимости от угла поворота рулевого колеса и скорости движения. На скорости ниже 22 миль в час задние колеса поворачивались в противофазе для меньшего радиуса поворота, переключаясь (с помощью электродвигателя) на синфазное рулевое управление на более высоких скоростях.
Система Mitsubishi дебютировала на Galant VR-4 в конце 1987. Он работал электрогидравлически на звеньях задней подвески, без механической связи между передними и задними колесами. Задние колеса поворачивались на 1,5 градуса синхронно с передними на скорости более 31 мили в час.
Nissan HICAS-II и Super HICAS заменили HICAS в 1988–89 годах, а также использовали гидравлический привод с компьютерным управлением для перемещения задних нижних боковых тяг.
Это позволяло изменять схождение на плюс/минус 1 градус в зависимости от скорости и угла поворота рулевого колеса. На более высоких скоростях задние колеса сначала поворачиваются не в фазе с передними, чтобы улучшить реакцию на поворот, а затем переключаются на синфазное рулевое управление для большей устойчивости. Отсутствовало заднее рулевое управление на малых скоростях. Nissan переоборудовал Super HICAS с гидравлического привода на электрический в середине 19-го.93.Система Dual-Mode 4WS компании Toyota, впервые представленная на японском рынке Celica в конце 1989 года, была концептуально аналогична системе Mazda, сочетая в себе рулевой вал, заднюю гидравлику и компьютерное управление, фазное заднее рулевое управление в зависимости от скорости, угла поворота рулевого колеса и скорости движения рулевого колеса. Система Toyota может быть заблокирована в режиме 2WS и предлагать нормальный и спортивный режимы 4WS с разной скоростью поворота задних колес.
Honda 4WS второго поколения, представленная на модели Prelude следующего поколения 19 сентября.
91 был новым, в нем использовалось компьютерное управление и электродвигатель, а не рулевой вал и планетарный редуктор. Эта система, предназначенная для устранения ограничений механической компоновки, была похожа на более поздние системы 4WS, хотя более новые системы имеют большую интеграцию с другой электроникой шасси.4WS не был популярен
Это правда, что 4WS встретили прохладно в США и Европе. Эффекты обработки были незначительными, и некоторые рецензенты не могли заметить разницу даже в последовательных тестах. Системы обычно были дорогими и отпугивали покупателей.
Однако в Японии полноприводное рулевое управление оставалось популярным на протяжении 90-х годов, даже появившись на семейных автомобилях, таких как Accord и Camry для японского рынка. 4WS был роскошным и высокотехнологичным, привлекательным для некоторых покупателей, а меньший радиус поворота, предоставляемый системами Honda, Mazda и Toyota, помогал на узких японских улицах (хотя параллельная парковка требовала некоторой акклиматизации).
 Mazda почти сразу же последовала их примеру, выпустив дополнительный двигатель 4w для нового 626 Turbo. На подходе новые полноприводные модели от Nissan и Mitsubishi, а несколько других производителей в США и Европе, а также в Японии работают над собственными системами 4ws.
Mazda почти сразу же последовала их примеру, выпустив дополнительный двигатель 4w для нового 626 Turbo. На подходе новые полноприводные модели от Nissan и Mitsubishi, а несколько других производителей в США и Европе, а также в Японии работают над собственными системами 4ws. Рулевое управление в противоположном направлении делает поворот автомобиля более резким, улучшая его маневренность на малых скоростях и сокращая радиус поворота. Теоретически рулевое управление в одном направлении улучшает управляемость на более высоких скоростях. Чтобы понять почему, учтите, что передние шины обычно управляемого автомобиля развивают угловые усилия сразу же, когда ими управляют, а задние развивают угловые усилия только тогда, когда кузов автомобиля начинает поворачиваться. В отличие от этого, на автомобиле 4ws все четыре шины развивают свои усилия на поворотах одновременно. Результатом является более отзывчивая управляемость при переходных маневрах, таких как вход и выход из поворотов. Кроме того, поскольку задние шины автомобиля 4ws не зависят исключительно от угла сноса автомобиля при прохождении поворотов, хвост автомобиля не так сильно раскачивается в поворотах и не виляет так сильно при быстрой смене полосы движения. Эти преимущества особенно ярко проявляются на скользком покрытии, говорят сторонники 4ws.
Рулевое управление в противоположном направлении делает поворот автомобиля более резким, улучшая его маневренность на малых скоростях и сокращая радиус поворота. Теоретически рулевое управление в одном направлении улучшает управляемость на более высоких скоростях. Чтобы понять почему, учтите, что передние шины обычно управляемого автомобиля развивают угловые усилия сразу же, когда ими управляют, а задние развивают угловые усилия только тогда, когда кузов автомобиля начинает поворачиваться. В отличие от этого, на автомобиле 4ws все четыре шины развивают свои усилия на поворотах одновременно. Результатом является более отзывчивая управляемость при переходных маневрах, таких как вход и выход из поворотов. Кроме того, поскольку задние шины автомобиля 4ws не зависят исключительно от угла сноса автомобиля при прохождении поворотов, хвост автомобиля не так сильно раскачивается в поворотах и не виляет так сильно при быстрой смене полосы движения. Эти преимущества особенно ярко проявляются на скользком покрытии, говорят сторонники 4ws.
 С помощью датчиков скорости и блока управления система настраивает свою работу не на угол поворота руля, а на скорость автомобиля. На скорости ниже 22 миль в час задние колеса поворачиваются противоположно передним до максимального угла в пять градусов. На скорости выше 22 миль в час они поворачиваются в том же направлении, что и передние колеса. Относительные углы поворота рулевого колеса и переход от противодействия рулевому управлению к рулевому управлению в одном направлении регулируются блоком управления системы. Полученные характеристики рулевого управления аналогичны характеристикам системы Honda, за одним важным исключением: в то время как рулевое колесо Prelude должно быть значительно повернуто, прежде чем начнется контрруление, 626 контррулит на низких скоростях всякий раз, когда его рулевое колесо перемещается от центра, независимо от того, насколько мал угол. . Таким образом, система Mazda обещает превосходную маневренность на низких скоростях.
С помощью датчиков скорости и блока управления система настраивает свою работу не на угол поворота руля, а на скорость автомобиля. На скорости ниже 22 миль в час задние колеса поворачиваются противоположно передним до максимального угла в пять градусов. На скорости выше 22 миль в час они поворачиваются в том же направлении, что и передние колеса. Относительные углы поворота рулевого колеса и переход от противодействия рулевому управлению к рулевому управлению в одном направлении регулируются блоком управления системы. Полученные характеристики рулевого управления аналогичны характеристикам системы Honda, за одним важным исключением: в то время как рулевое колесо Prelude должно быть значительно повернуто, прежде чем начнется контрруление, 626 контррулит на низких скоростях всякий раз, когда его рулевое колесо перемещается от центра, независимо от того, насколько мал угол. . Таким образом, система Mazda обещает превосходную маневренность на низких скоростях. Единственным неоспоримым преимуществом 4ws является улучшенная маневренность на парковке. Система Prelude уменьшает радиус поворота с 34,8 до 31,4 фута; соответствующие цифры для модели 626 составляют 38,0 и 36,1 фута.
Единственным неоспоримым преимуществом 4ws является улучшенная маневренность на парковке. Система Prelude уменьшает радиус поворота с 34,8 до 31,4 фута; соответствующие цифры для модели 626 составляют 38,0 и 36,1 фута. Единственная разница между двумя Prelude, которые мы заказали, заключалась в том, что у одного был пакет 4ws, который включает легкосплавные диски, дверные замки с электроприводом и тонированные под бронзу стекла. Обе машины были оснащены одинаковыми пружинами, амортизаторами, стабилизаторами поперечной устойчивости и шинами, хотя Honda указывает давление в шинах 28 фунтов на квадратный дюйм для всех моделей 4ws Prelude и на два фунта меньше для задних шин модели 2ws.
Единственная разница между двумя Prelude, которые мы заказали, заключалась в том, что у одного был пакет 4ws, который включает легкосплавные диски, дверные замки с электроприводом и тонированные под бронзу стекла. Обе машины были оснащены одинаковыми пружинами, амортизаторами, стабилизаторами поперечной устойчивости и шинами, хотя Honda указывает давление в шинах 28 фунтов на квадратный дюйм для всех моделей 4ws Prelude и на два фунта меньше для задних шин модели 2ws. Кроме того, пружины и стабилизаторы поперечной устойчивости, которые поставляются с AAS, мягче, чем оборудование, установленное на автомобиле 4ws. Чтобы максимально компенсировать эти более мягкие компоненты, мы установили систему AAS нашей Mazda 2ws в режим Sport Auto, который обеспечивает значительно более жесткое демпфирование, чем амортизаторы автомобиля 4ws. По крайней мере, колеса и шины двух заказанных нами автомобилей были идентичными.
Кроме того, пружины и стабилизаторы поперечной устойчивости, которые поставляются с AAS, мягче, чем оборудование, установленное на автомобиле 4ws. Чтобы максимально компенсировать эти более мягкие компоненты, мы установили систему AAS нашей Mazda 2ws в режим Sport Auto, который обеспечивает значительно более жесткое демпфирование, чем амортизаторы автомобиля 4ws. По крайней мере, колеса и шины двух заказанных нами автомобилей были идентичными.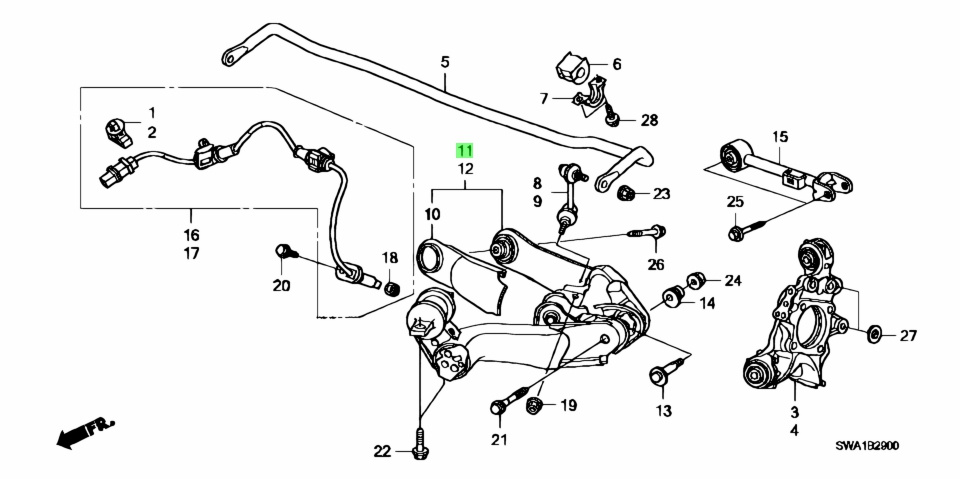 Наш тест с двойной сменой полосы движения требует быстрого переключения с одной полосы шириной двенадцать футов на другую, а затем обратно в точках, отмеченных конусами. Хорошие результаты в этом тесте требуют управляемости, а также быстрой и точной реакции рулевого управления во время двух крутых срезов. В обоих тестах мы меняли размеры трасс, чтобы изучить влияние 4ws на разные диапазоны скоростей. А поскольку говорят, что 4ws особенно полезен на скользких поверхностях, мы провели большую часть наших тестов как на сухом, так и на мокром асфальте.
Наш тест с двойной сменой полосы движения требует быстрого переключения с одной полосы шириной двенадцать футов на другую, а затем обратно в точках, отмеченных конусами. Хорошие результаты в этом тесте требуют управляемости, а также быстрой и точной реакции рулевого управления во время двух крутых срезов. В обоих тестах мы меняли размеры трасс, чтобы изучить влияние 4ws на разные диапазоны скоростей. А поскольку говорят, что 4ws особенно полезен на скользких поверхностях, мы провели большую часть наших тестов как на сухом, так и на мокром асфальте. Учитывая более благоприятное распределение веса Mazda 4ws (благодаря заднему рулевому управлению) и в целом более жесткую подвеску, ее преимущество в противоскользящем покрытии неудивительно.
Учитывая более благоприятное распределение веса Mazda 4ws (благодаря заднему рулевому управлению) и в целом более жесткую подвеску, ее преимущество в противоскользящем покрытии неудивительно. Две «Хонды» развернулись с одинаковой скоростью — 31,5 мили в час. Оба резко повернули и продемонстрировали хороший контроль, хотя машине 4ws требовалось немного больше усилий на руле.
Две «Хонды» развернулись с одинаковой скоростью — 31,5 мили в час. Оба резко повернули и продемонстрировали хороший контроль, хотя машине 4ws требовалось немного больше усилий на руле.
 Наша первая трасса состояла из 25-футового сегмента для первой смены полосы движения, за которым следовал 50-футовый бег по прямой, а затем еще 25-футовый участок для возвращения на исходную полосу.
Наша первая трасса состояла из 25-футового сегмента для первой смены полосы движения, за которым следовал 50-футовый бег по прямой, а затем еще 25-футовый участок для возвращения на исходную полосу.
 Prelude 4ws был быстрее и более управляемым, чем модель 2ws. Действительно, разница в скорости была настолько велика, что вождение 4ws Prelude через двойную смену полосы движения на пределе возможностей автомобиля 2ws было практически без усилий. Напротив, система Mazda 4ws была неоднозначным благословением. Хотя 4ws 626 чувствовал себя лучше, чем автомобиль 2ws в скоростных переключениях, его отстающая система усилителя руля затрудняла управление. Что еще более важно, 4ws не улучшил скорость Mazda на трассах.
Prelude 4ws был быстрее и более управляемым, чем модель 2ws. Действительно, разница в скорости была настолько велика, что вождение 4ws Prelude через двойную смену полосы движения на пределе возможностей автомобиля 2ws было практически без усилий. Напротив, система Mazda 4ws была неоднозначным благословением. Хотя 4ws 626 чувствовал себя лучше, чем автомобиль 2ws в скоростных переключениях, его отстающая система усилителя руля затрудняла управление. Что еще более важно, 4ws не улучшил скорость Mazda на трассах. А поскольку поверхность Chrysler Jennite недостаточно велика для 300-футовой площадки, мы провели тест на устойчивость на мокрой дороге на круге, который мы обычно используем, с помощью сильного дождя.
А поскольку поверхность Chrysler Jennite недостаточно велика для 300-футовой площадки, мы провели тест на устойчивость на мокрой дороге на круге, который мы обычно используем, с помощью сильного дождя.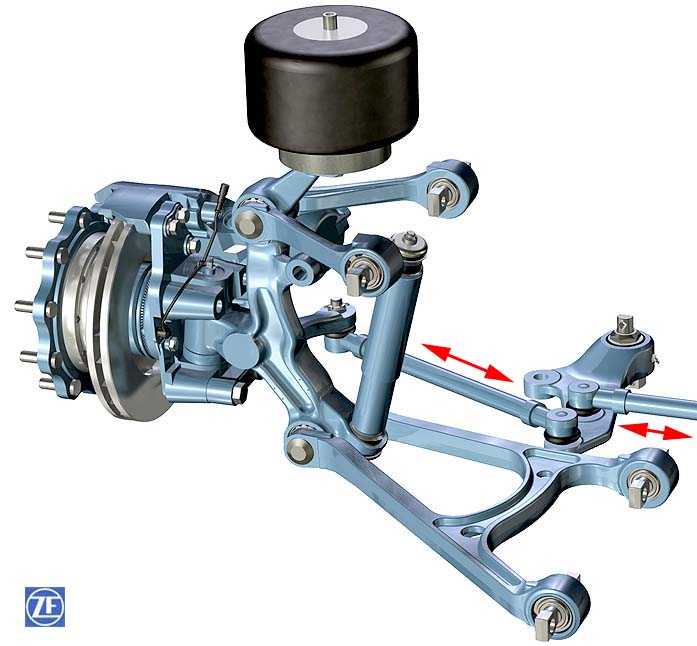 Две «Хонды» чувствовали себя почти одинаково на трассе и разгонялись с одинаковой скоростью — 24,0 мили в час. Mazda 2ws на самом деле была быстрее, чем модель 4ws, со скоростью от 24,5 до 23,0 миль в час. И хотя у обеих Mazda недостаточная поворачиваемость, у 4ws 626 недостаточная поворачиваемость больше. Мы также почувствовали, как его хвост немного покачивается на протяжении всей трассы, хотя это не оказало заметного влияния на его управляемость.
Две «Хонды» чувствовали себя почти одинаково на трассе и разгонялись с одинаковой скоростью — 24,0 мили в час. Mazda 2ws на самом деле была быстрее, чем модель 4ws, со скоростью от 24,5 до 23,0 миль в час. И хотя у обеих Mazda недостаточная поворачиваемость, у 4ws 626 недостаточная поворачиваемость больше. Мы также почувствовали, как его хвост немного покачивается на протяжении всей трассы, хотя это не оказало заметного влияния на его управляемость. Также стало намного лучше себя чувствовать. Хвост автомобиля 4ws был очень рыхлым и угрожающим, и нам было трудно сбросить лишнюю скорость, не боком. 2ws 626 тоже не чувствовал себя комфортно с вывернутым хвостом, но вероятность того, что он примет такое отношение, была гораздо ниже.
Также стало намного лучше себя чувствовать. Хвост автомобиля 4ws был очень рыхлым и угрожающим, и нам было трудно сбросить лишнюю скорость, не боком. 2ws 626 тоже не чувствовал себя комфортно с вывернутым хвостом, но вероятность того, что он примет такое отношение, была гораздо ниже. Автомобиль 2ws преодолел курс с немного меньшей недостаточной поворачиваемостью, хотя 4ws 626 чувствовал себя одинаково стабильно в других отношениях.
Автомобиль 2ws преодолел курс с немного меньшей недостаточной поворачиваемостью, хотя 4ws 626 чувствовал себя одинаково стабильно в других отношениях. И хотя две Honda были примерно равны по управляемости, Mazda 4ws была явно менее стабильной, чем ее собрат в большинстве тестов.
И хотя две Honda были примерно равны по управляемости, Mazda 4ws была явно менее стабильной, чем ее собрат в большинстве тестов. Система Mazda 4ws добавляет почти 100 фунтов к 626 и, с поправкой на различия в подвеске двух протестированных автомобилей, стоит около 1385 долларов. Обе системы действительно улучшают маневренность на низких скоростях, что ценно, но мы сомневаемся, что многие покупатели будут тратить столько денег только на то, чтобы упростить парковку.
Система Mazda 4ws добавляет почти 100 фунтов к 626 и, с поправкой на различия в подвеске двух протестированных автомобилей, стоит около 1385 долларов. Обе системы действительно улучшают маневренность на низких скоростях, что ценно, но мы сомневаемся, что многие покупатели будут тратить столько денег только на то, чтобы упростить парковку. Мы по-прежнему надеемся, что рано или поздно 4ws оправдает свое обещание. Honda и Mazda заслуживают признания как первопроходцы, но, по крайней мере, на данный момент 4ws не является большим скачком вперед.
Мы по-прежнему надеемся, что рано или поздно 4ws оправдает свое обещание. Honda и Mazda заслуживают признания как первопроходцы, но, по крайней мере, на данный момент 4ws не является большим скачком вперед. Наша цель, как и при тестировании на треке, состояла в том, чтобы увидеть, какие различия мы можем обнаружить между автомобилями 4ws и 2ws.
Наша цель, как и при тестировании на треке, состояла в том, чтобы увидеть, какие различия мы можем обнаружить между автомобилями 4ws и 2ws.

 Никто не считал автомобиль 4ws нестабильным, но он не двигался так уверенно, как его собрат 2ws. Даже в поворотах сочетание легкого руля и резких поворотов давало слишком мало ощущения дороги большинству наших тестеров. По общему признанию, это впечатление, вероятно, со временем исчезнет.
Никто не считал автомобиль 4ws нестабильным, но он не двигался так уверенно, как его собрат 2ws. Даже в поворотах сочетание легкого руля и резких поворотов давало слишком мало ощущения дороги большинству наших тестеров. По общему признанию, это впечатление, вероятно, со временем исчезнет. —Csaba Csere
—Csaba Csere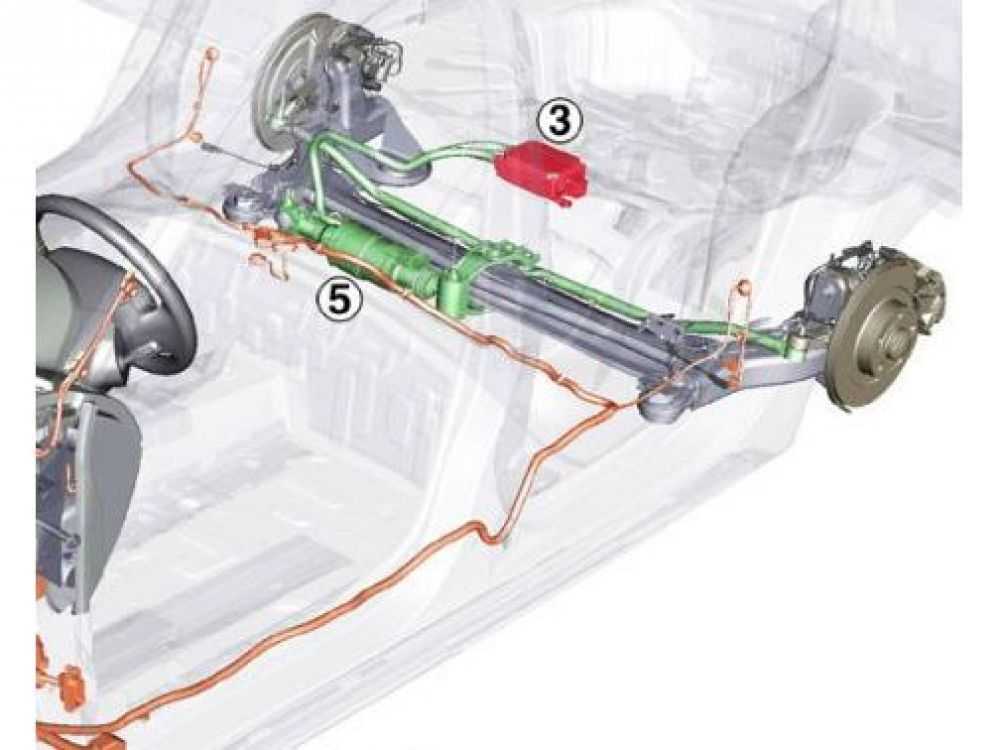 США
США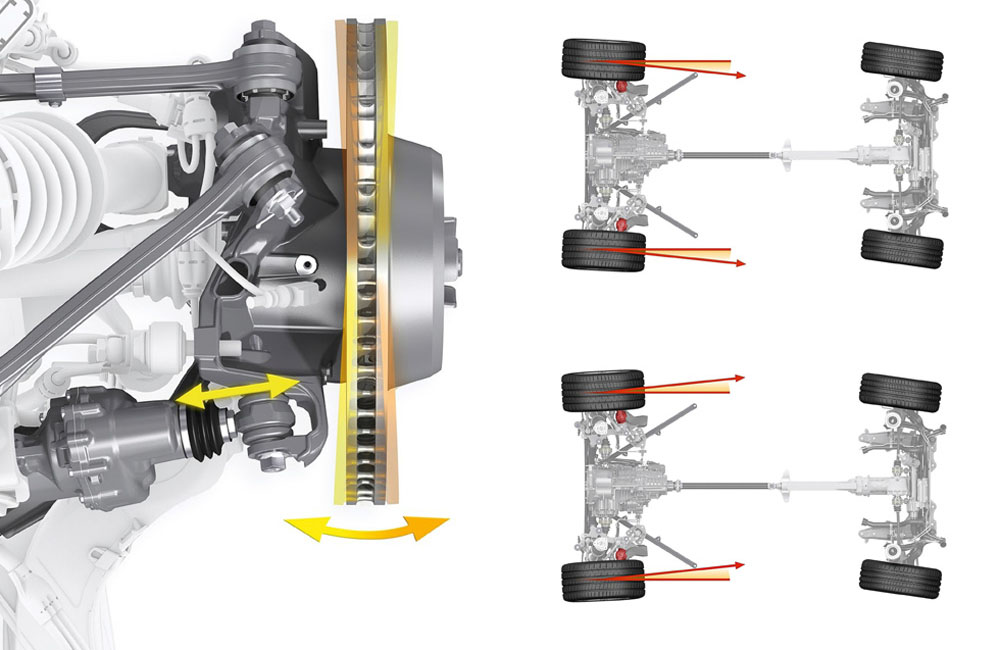 К концу 90-х он почти исчез, но за последнее десятилетие 4WS снова появился на моделях Nissan, Renault, BMW, Acura и даже Porsche.
К концу 90-х он почти исчез, но за последнее десятилетие 4WS снова появился на моделях Nissan, Renault, BMW, Acura и даже Porsche.
 Решение Nissan состояло в том, чтобы использовать управляемые компьютером гидравлические поршни для выборочного сжатия сайлентблоков заднего подрамника Skyline, эффективно управляя задними продольными рычагами плюс/минус 0,5 градуса для повышения устойчивости при маневрах на высокой скорости.
Решение Nissan состояло в том, чтобы использовать управляемые компьютером гидравлические поршни для выборочного сжатия сайлентблоков заднего подрамника Skyline, эффективно управляя задними продольными рычагами плюс/минус 0,5 градуса для повышения устойчивости при маневрах на высокой скорости. около 10 процентов.
около 10 процентов. Это позволяло изменять схождение на плюс/минус 1 градус в зависимости от скорости и угла поворота рулевого колеса. На более высоких скоростях задние колеса сначала поворачиваются не в фазе с передними, чтобы улучшить реакцию на поворот, а затем переключаются на синфазное рулевое управление для большей устойчивости. Отсутствовало заднее рулевое управление на малых скоростях. Nissan переоборудовал Super HICAS с гидравлического привода на электрический в середине 19-го.93.
Это позволяло изменять схождение на плюс/минус 1 градус в зависимости от скорости и угла поворота рулевого колеса. На более высоких скоростях задние колеса сначала поворачиваются не в фазе с передними, чтобы улучшить реакцию на поворот, а затем переключаются на синфазное рулевое управление для большей устойчивости. Отсутствовало заднее рулевое управление на малых скоростях. Nissan переоборудовал Super HICAS с гидравлического привода на электрический в середине 19-го.93. 91 был новым, в нем использовалось компьютерное управление и электродвигатель, а не рулевой вал и планетарный редуктор. Эта система, предназначенная для устранения ограничений механической компоновки, была похожа на более поздние системы 4WS, хотя более новые системы имеют большую интеграцию с другой электроникой шасси.
91 был новым, в нем использовалось компьютерное управление и электродвигатель, а не рулевой вал и планетарный редуктор. Эта система, предназначенная для устранения ограничений механической компоновки, была похожа на более поздние системы 4WS, хотя более новые системы имеют большую интеграцию с другой электроникой шасси.