Содержание
Подъемно-транспортные механизмы и машины
Подъемно-транспортные механизмы и машины
Подъемные машины и устройства предназначены для вертикального и в некоторых случаях горизонтального перемещения груза. К ним относятся домкраты, полиспасты, тали, электротали, строительные лебедки, краны-укосины, подъемники, подъемные стационарные и передвижные краны.
К транспортирующим машинам принадлежат конвейеры, элеваторы, самоходные тележки, которые служат для перемещения грузов в горизонтальном направлении или с некоторым наклоном.
Вилочные и ковшовые погрузчики, козловые и башенные краны предназначены не только для подъема, но и для перемещения грузов на небольшие расстояния.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Домкраты —это простейшие грузоподъемные устройства, в которых применен выдвижной толкатель, подводимый под груз и поднимающий его на небольшую высоту.
По конструкции домкраты бывают винтовыми, реечными, гидравлическими и клиновыми. Винтовые домкраты обладают свойством самоторможения и позволяют устанавливать грузы по высоте с высокой точностью. Винтовой домкрат (рис. 34) с ручным приводом состоит из корпуса, в котором закреплена гайка с ввинченным в нее стальным винтом. Винт оканчивается опорной головкой, воздействующей на груз.
Винтовые домкраты обладают свойством самоторможения и позволяют устанавливать грузы по высоте с высокой точностью. Винтовой домкрат (рис. 34) с ручным приводом состоит из корпуса, в котором закреплена гайка с ввинченным в нее стальным винтом. Винт оканчивается опорной головкой, воздействующей на груз.
Через отверстие в винте продета рукоятка для враглщения винта.
Рис. 34. Винтовой домкрат:
1 — винт, 2 — корпус, 3 — гайка, 4 — рукоятка, 5 —. опорная головка, 6 — храповое колесо, 7 — собачка
В стесненных условиях для облегчения вращения винта применяют трещотку, состоящую из устанавливаемого на винт храпового колеса 6 и шарнирно закрепляемой на конце рукоятки двусторонней подпружиненной собачки 7. Грузоподьемость винтовых домкратов до 50 т, высота подъема груза до 0,5—0,6 м, скорость подъема груза 1-5—35 мм/мин и КПД 0,3—0,4.
Реечные домкраты (рис. 35) применяют для подъема низкорасположенных грузов массой до 6 т. В корпусе домкрата размещен выдвижной толкатель, выполненный в виде стальной зубчатой рейки с прикрепленной к ее нижней части опорной лапой. На верхней части толкателя расположена опорная головка. Толкатель выдвигается с помощью шестерни, приводимой во вращение зубчатой передачей от рукоятки. Для фиксации груза в поднятом положении применяют храповое колесо с собачкой. Высота подъема груза не превышает 0,6 м, а КПД реечных домкратов 0,7—0,8. При работе домкрата лапой его грузоподъемность из-за смещения груза уменьшается в два раза.
На верхней части толкателя расположена опорная головка. Толкатель выдвигается с помощью шестерни, приводимой во вращение зубчатой передачей от рукоятки. Для фиксации груза в поднятом положении применяют храповое колесо с собачкой. Высота подъема груза не превышает 0,6 м, а КПД реечных домкратов 0,7—0,8. При работе домкрата лапой его грузоподъемность из-за смещения груза уменьшается в два раза.
Гидравлический домкрат (рис. 36) представляет собой гидроцилиндр, в котором расположен подводимый под груз поршень. Поршень выдвигается за счет нагнетания в гидроци-Линдр через клапан с помощью рукоятки и плунжера рабочей жидкости, засасываемой из полости через обратный клапан.
Рис. 35. Реечный домкрат:
1 — рукоятка, 2 — храповое колесо, S— собачка, 4 — головка, 5 — шестерня, 6 — лапа, 7 -— зубчатая передача, 8 — зубчатая рейка, 9 — корпус
Рис. 36. Гидравлический домкрат: 1 — гидроцилиндр, 2 —перепускной клапан, 3-манжета, 4 — плунжер, 5 — рукоятка, 6-полость, 7 – обратный клапан, 8 — поршень, 9 — кран
Для опускания поршня открывается перепускной кран, через который рабочая жидкость поступает обратно в полость 6.![]() Чтобы воспрепятствовать подтеканию рабочей жидкости, плунжер снабжен уплотняющей манжетой.
Чтобы воспрепятствовать подтеканию рабочей жидкости, плунжер снабжен уплотняющей манжетой.
Грузоподъемность гидравлических домкратов 750 т и более, высота подъема до 0,4.м, а КПД 0,85—0,9.
Рис. 37. Схема работы полиспастов:
и — подъем груза канатом в одну нить, б — подъем груза канатом в две нити, в — подъем груза канатом в четыре нити; 1,2 — неподвижные и подвижные блоки, 3 — лебедка; Q — масса поднимаемого груза
Клиновой домкрат представляет собой корпус, в котором с помощью винта перемещается клин со встроенной гайкой и поднимает опорную плиту. В связи с небольшой высотой подъема (10—15 мм) эти домкраты применяют для выверки оборудования. Их грузоподъемность до 10 т.
Полиспасты предназначены для увеличения тягового усилия канатных подъемных устройств путем снижения их скорости. Скорость подъема снижается во столько раз, во сколько увеличивается тяговое усилие. Полиспасты (рис. 37) состоят из одного или группы неподвижных блоков, закрепляемых на опоре; одного или нескольких подвижных блоков, прикрепляемых к грузу; огибающего их каната, один конец которого жестко прикреплен к верхней или нижней обойме полиспаста, а другой конец через отводные ролики направляется на лебедку. При выборе полиспаста следует учитывать, что его грузоподъемность увеличивается по сравнению с тяговым усилием лебедки примерно во столько раз, сколько в нем есть сокращающихся в процессе работы нитей канатов. Для более точного расчета, проводимого для полиспастов с числом подвижных роликов более 6—7, применяют специальные таблицы.
При выборе полиспаста следует учитывать, что его грузоподъемность увеличивается по сравнению с тяговым усилием лебедки примерно во столько раз, сколько в нем есть сокращающихся в процессе работы нитей канатов. Для более точного расчета, проводимого для полиспастов с числом подвижных роликов более 6—7, применяют специальные таблицы.
Грузоподъемность полиспастов достигает 50 т и более. Для ее повышения применяют системы из нескольких сблокированных между собой полиспастов.
Тали — это грузоподъемные механизмы, смонтированные в одном корпусе с приводом и предназначенные для подъема или подъема и горизонтального перемещения груза.
Грузоподъемность талей 10 т при высоте подъема до 3 м.
При подъеме груза натягивают приводную бесконечную цепь и заставляют вращаться приводное колесо, которое в свою очередь через червяк вращает червячное колесо со звездочкой. Через звездочку перекинута грузовая цепь для подъема блока с крюком, к которому подвешивают груз.
Для придания талям мобильности они могут быть подвешены с помощью оси к тележкам (кошкам), перемещающимся по монорельсам на роликах.
Электрическая таль (рис. 38) оборудована электродвигателем, приводящим в действие механизм подъема. Электротали бывают стационарные или передвижные, с ручным или электрическим приводом, с продольным и поперечцым расположением подъемного барабана, с ходовыми тележками различной конструкции.
Рис. 38. Электрическая таль с со-осным расположением электродвигателя:
1 — токоприемники, 2 — механизм привода ходовых катков, 3 — электродвигатель перемещения электротали, 4 — магнитные пускатели, 5 — грузовой крюк, 6 — панель кнопочного управления двигателями, 7 — грузовой барабан, 8 — электродвигатель подъема и опускания груза, 9 — ходовая тележка, 10 — монорельс
Электротали применяют в ремонтных цехах, а также на складах и открытых погрузочно-разгрузоч-ных и ремонтных площадках. Грузоподъемность электроталей доходит до 5 т при скорости подъема груза 3—18 м/мин и скорости горизонтального перемещения до 30 м/мин.
Лебедки (рис. 39) — это грузоподъемные механизмы, в которых тяговое усилие создается путем наматывания каната на барабан В зависимости от рода привода лебедки бывают ручными и механическими, а по способу передачи движения к барабану — шестеренные, червячные, зубчато-фрикционные и редукторные. Тяговое усилие ручной лебедки до 100 МН, канатоемкость барабана до 300 м. Для работы в стесненных условиях применяют ручные рычажные лебедки с тяговым усилием до 30 МН.
Тяговое усилие ручной лебедки до 100 МН, канатоемкость барабана до 300 м. Для работы в стесненных условиях применяют ручные рычажные лебедки с тяговым усилием до 30 МН.
Схема тормозного устройства ручных лебедок показана на рис. 40.
Зубчато-фрикционная лебедка показана на рис. 41. По конструкции фрикционные муфты лебедок могут быть конусными, ленточными и дисковыми.
Рис. 39. Лебедки:
а — с ручным приводом, 6 — ручная рычажная, в — электрическая редук-торная подъемная; 1 — рукоятка, 2 — большое зубчатое колесо, 3 — Стяжной болт, 4 — щекаг 5 — барабан, 6 —храповое колесо с собачкой, 7—протягивающее устройство, 8 — тормозное устройство, 9 — электродвигатель, 10 — металлическая рама, 11— редуктор
Редукторные лебедки останавливают колодочными фрикционными тормозами, а зубчато-фрикционные — ленточными.
Для чисто тяговых операций применяют шпилевые лебедки с барабаном вогнутой формы. Тяговое усилие создается за счет действия- сил трения между канатом и шпилем. Тяговое усилие лебедок серии ТЛ составляет 12,5—50 МН при ручном приводе и 3,2— 50 МН при электрическом приводе. Канатоемкость лебедок равна 100—150 м при ручном приводе и 80—250 м при электрическом. Скорость навивки каната у лебедок с электрическим приводом 0,31—0,82 м/с.
Тяговое усилие лебедок серии ТЛ составляет 12,5—50 МН при ручном приводе и 3,2— 50 МН при электрическом приводе. Канатоемкость лебедок равна 100—150 м при ручном приводе и 80—250 м при электрическом. Скорость навивки каната у лебедок с электрическим приводом 0,31—0,82 м/с.
Строительные подъемники — это грузоподъемные машины, предназначенные для подъема и спуска грузов с помощью грузонечущих устройств, перемещающихся по вертикальным или наклонным направляющим. По конструкции направляющих различают подъемники, (рис. 42) с подвесными направляющими и с жесткими направляющими — мачтовые и шахтные.
Рис. 40. Схема тормозного устройства лебедки:
1 — собачка, 2 — храповое колесо, 3 — фрикционная накладка, 4 — приводная рукоятка, 5 — ведущие диски тормоза, 6 — ведущее зубчатое колесо
В подъемниках с подвесными направляющими грузонесущее устройство перемещается вдоль натянутых вертикально направляющих. К недостаткам подъемников этого типа относится возможность раскачки грузонесущего устройства при значительной высоте подъема, а также трудности с установкой консольной опорной рамы на крыше здания.
Рис. 41. Зубчато-фрикционная лебедка с ременным приводом и одной шестеренной передачей:
1 — станина, 2 — храповое колесо, 3 — рукоятка включения фрикциона, 4—барабан, 5—приводной шкив
По конструкции направляющие бывают комбинированными, т. е. состоят из гибких и жестких элементов или шарнирно сочлененных жестких элементов, и гибкими, которые изготовляют из канатов. Направляющие натягивают как за счет массы поднимаемого груза, так и с помощью специальных натяжных устройств. При фиксированном грузонесущем устройстве груз снимают вручную. Подъемники, оборудованные выдвижными платформами или монорельсами с электроталыо, подают груз непосредственно в проем здания.
Рис. 42.
а — с подвесными направляющими, б — мачтовый, в — шахтный; 1 — натяжное устройство. 2 — лебедка, 3—грузонесущее устройство, 4 —направляющие втулки, 5 — грузовой канат, 6 — направляющие, 7 —блок, 8, 13 — рамы, 9 — противовес, 10 — здание, 11 —настенная опора, 12 —ходовые ролики, 14 — шахта
Мачтовый подъемник включает в себя вертикальную раму, по которой с помощью канатного механизма подъема может перемещаться грузонесущее устройство, снабженное ходовыми роликами. Такие подъемники в ряде случаев можно использовать и для подъема людей. При малой высоте подъема мачтогые подъемники могут стоять свободно, при большой высоте их прикрепляют к стене здания опорами. Груз подают на уровень проема здания или внутрь здания. В последнем случае при использовании выдвижных платформ груз не опускают на перекрытие, а при применении выдвижных монорельсов с электроталями он может быть опущен.
Такие подъемники в ряде случаев можно использовать и для подъема людей. При малой высоте подъема мачтогые подъемники могут стоять свободно, при большой высоте их прикрепляют к стене здания опорами. Груз подают на уровень проема здания или внутрь здания. В последнем случае при использовании выдвижных платформ груз не опускают на перекрытие, а при применении выдвижных монорельсов с электроталями он может быть опущен.
На строительстве больше всего распространены мачтовые подъемники, как наиболее простые в монтаже.
Грузоподъемность мачтовых подъемников серии ТП составляет 3,2—5 МН, высота подъема 6—50 м, скорость подъема 0,1—0,52 м/с; груз может перемещаться по горизонтали от мачты на расстояние до 3 м.
В шахтных подъемниках вместо мачты устанавливают шахту, внутри которой по направляющим с помощью канатного механизма подъема перемещается грузонесущее устройство.
Шахтные подъемники по назначению подразделяют на грузовые и пассажирские. Их крепят к зданию как с помощью настенных опор, так и оттяжками (при установке подъемника вне здания). В качестве грузонесущих устройств в подъемниках используют платформы, клети и саморазгружающиеся ковши. Шахту собирают из отдельных элементов или секций.
В качестве грузонесущих устройств в подъемниках используют платформы, клети и саморазгружающиеся ковши. Шахту собирают из отдельных элементов или секций.
В некоторых случаях подъемники с жесткими направляющими устанавливают на ходовые рельсовые тележки, что дает им возможность перемещаться в горизонтальном направлении. Такие подъемники обеспечивают прямолинейность движения грузонесу-щего устройства без раскачки, что позволяет повышать их производительность путем увеличения скорости подъема и спуска грузов.
Ковшовые подъемники (рис. 43) применяют для подъема сыпучих грузов массой до 2 т на высоту до 160 м со скоростью до 60 м/мин. Ковш по наклонным направляющим поднимается с помощью канатов, наматываемых на канатный барабан лебедки, приводимой в действие электродвигателем 5.
Рис. 43. Ковшовый подъемник:
1 — ковш, 2 — канат, 3 — направляющая, 4 — лебедка, 5 — электродвигатель
Монтажные мачты (рис. 44) применяют в случаях, когда использование монтажного крана нерационально, например при единичном подъеме тяжелого груза. Они представляют собой устанавливаемую вертикальную или с небольшим уклоном (10—12°) стойку, удерживаемую системой расчалок. Мачты можно изготовлять как из дерева, так и из металла. В последнем случае они бывают трубчатыми или решетчатыми. Трубчатые мачты достигают высоты до 30 м при грузоподъемности до 30 т, решетчатые соответственно 60 м при 150 т. Разновидностью монтажных мачт являются шевры (рис. 45), грузоподъемность которых достигает 50 т, и монтажные порталы, представляющие собой П-образные рамы с жесткими или шарнирными узлами, предназначенные для подъема громоздких грузов на большую высоту. Порталы в зависимости от назначения бывают неподвижные и качающиеся. Высота порталов может достигать 50 м при расстоянии между его вертикальными стойками 6—9 м, а грузоподъемность — 300 т. Для подъема грузов массой свыше 500 т и более применяют порталы, у которых вместо грузовых полиспастов использована металлическая лента, а вместо лебедок — гидродомкраты.
Они представляют собой устанавливаемую вертикальную или с небольшим уклоном (10—12°) стойку, удерживаемую системой расчалок. Мачты можно изготовлять как из дерева, так и из металла. В последнем случае они бывают трубчатыми или решетчатыми. Трубчатые мачты достигают высоты до 30 м при грузоподъемности до 30 т, решетчатые соответственно 60 м при 150 т. Разновидностью монтажных мачт являются шевры (рис. 45), грузоподъемность которых достигает 50 т, и монтажные порталы, представляющие собой П-образные рамы с жесткими или шарнирными узлами, предназначенные для подъема громоздких грузов на большую высоту. Порталы в зависимости от назначения бывают неподвижные и качающиеся. Высота порталов может достигать 50 м при расстоянии между его вертикальными стойками 6—9 м, а грузоподъемность — 300 т. Для подъема грузов массой свыше 500 т и более применяют порталы, у которых вместо грузовых полиспастов использована металлическая лента, а вместо лебедок — гидродомкраты.
Рис. 44. Монтажные мачты:
а — решетчатая металлическая, б — трубчатая металлическая, в — деревянная; 1 — цилиндр, 2 — отводной блок, 3 — груз, 4 — оттяжка для груза, 5 — грузовой полиспаст, 6 — паук
Рис. 45. Шевр:
45. Шевр:
— грузовой полиспаст, 2 — мачта, 3 — огводной блок, 4 — сбегающая нить грузов вого полиспаста, идущая на лебедку, 5 — канат для изменения вылета мачты
Рис. 46. Простейшие грузоподъемные устройства:
а — переносная монтажная стрела, б — мачтово-стреловой кран, в — вантовый кран; 1 — шарнир, 2 — стрела, 3 — стреловой полиспаст, 4 — грузовой полиспаст, 5 — ванты, 6 — мачты, 7 — шаровая пята
Монтажные стрелы (рис. 46, а) — это грузоподъемное устройство, состоящее из прикрепленной к строительным конструкциям или специальным мачтам консольной наклоняющейся стрелы и канатной лебедки и предназначенное для монтажа оборудования и подъема различных грузов.
Грузоподъемность переносных монтажных стрел от 3 до 10 т при длине стрелы от 10 до 25 м.
Основанные на этом принципе мачтово-стреловые краны (рис. 46, б) могут поднимать грузы массой до 40 т, а вантовые (рис. 46, в)—до 40 т и более.
Рис. 47. Кран-укосина:
1 — строительная конструкция, 2 — несущая ферма, 3 — блоки. 4 — канат
4 — канат
Монтажные подъемные краны подразделяют на краны-укосины, полноповоротные переставные и передвижные.
Кран-укосина (рис. 47) представляет собой закрепляемую на вертикальной мачте или какой-нибудь строительной конструкции жесткую ферму с системой блоков 3, через которые пропущен канат 4 от грузоподъемной лебедки.
Полноповоротный переставной кран (рис. 48) состоит из опорной тележки или крестовины, на которой смонтирована стрела и полноповоротная платформа с размещенными на ней электродвигателем и червячным редуктором, приводящим во вращение канатный барабан.
Грузоподъемность этих кранов 0,5—1,0 т при вылете стрелы от 2 до 4 м и высоте его подъема до 50 м, скорость подъема груза 12—15 м/мин, мощность электродвигателя 2,8 кВт, масса 1685 кг.
Различают передвижные подъемные краны на рельсовом, гусеничном, пневмоколесном и автомобильном ходовом устройстве.
Кран с вращающейся стрелой, закрепляемой в верхней части перемещающейся по рельсам вертикальной башни, называется башенным краном. Помимо башенных кранов широко распространены краны на гусеничном ходу грузоподъемностью до 160 т. Разновидностью кранов на гусеничном ходу являются краны-трубоукладчики с подъемной стрелой, располагаемой сбоку.
Помимо башенных кранов широко распространены краны на гусеничном ходу грузоподъемностью до 160 т. Разновидностью кранов на гусеничном ходу являются краны-трубоукладчики с подъемной стрелой, располагаемой сбоку.
Пневмоколесные краны обладают повышенной по сравнению с гусеничными кранами маневренностью, их грузоподъемность до 100 т (при использовании выносных опор). Более маневренны краны на автомобильном шасси, грузоподъемность которых достигает 60 т.
Рис. 48. Полноповоротный переставной кран: 1 — червячный редуктор, 2 — электродвигатель, 3 — платформа, 4 — стрела, 5 — нележка
Рис. 49. Ленточный конвейер: 1 — электродвигатель, 2 — редуктор, 3, 5 ведущий и ведомый барабаны, 4 — лента, 6 натяжное устройство
Ленточный конвейер (рис. 49) —это машина для непрерывного транспортирования грузов, грузонесущим и тяговым элементом которой являются замкнутые ленты. Лента увлекается вращающимся ведущим барабаном за счет возникающих между ними сил трения. Ведомый барабан с помощью натяжного устройства в создает требуемое натяжение ленты.
Ведомый барабан с помощью натяжного устройства в создает требуемое натяжение ленты.
Перемещаемые ленточным конвейером грузы (штучные или сыпучие) укладываются на несущую ленту, которая составлена из нескольких прорезиненных слоев хлопчатобумажной ткани. Для конвейеров большой длины выпускают ленты, армированные тонкими стальными канатиками. Скорость конвейерной ленты 1,5—2,5 м/с для сыпучих грузов и 0,5—1,5 м/с для штучных. Ленточные конвейеры могут перемещать груз под углом до 20°. В случае, если требуется поднимать грузы на больший угол, на ленту через определенные промежутки устанавливают поперечные планки-удерживатели.
Ленточные конвейеры изготовляют как стационарные, так и передвижные.
Расстояние между центрами барабанов передвижных ленточных конвейеров серии ТК равно 5—15 м, ширина ленты 0,4—0,5 м, скорость ее 1,6 м/с и высота разгрузки 1,5—5,5 м. Длина стационарных ленточных конвейеров 40—80 м.
Пластинчатые конвейеры — это машины, у которых грузонесу-щий элемент состоит из отдельных пластин, прикрепленных к замкнутому тяговому элементу. Такие конвейеры предназначены для перемещения горячих, кусковых и штучных грузов с острыми кромками как по горизонтали, так и под углом до 30°.
Такие конвейеры предназначены для перемещения горячих, кусковых и штучных грузов с острыми кромками как по горизонтали, так и под углом до 30°.
Винтовые конвейеры (рис. 50)—это машины, у которых груз перемещается в трубе-желобе валом с винтовыми лопастями. Винтовые лопасти при вращении захватывают помещенный в трубе-желобе материал и перемещают его в продольном направлении. Винтовые конвейеры применяют для перемещения сыпучих и пластичных материалов на расстояние до 30—40 м как по горизонтали, так и с наклоном до 75—80°.
Сплошные винтовые лопасти рекомендуются для перемещения сыпучих мелкозернистых материалов, например цемента. Для транспортирования крупнокусковых материалов, таких, как гравий, следует применять винтовые конвейеры с ленточными лопастями и с лопастями в виде лопаток, расположенных по винтовой линии. Пластичные материалы, например бетонные и растворные смеси, следует перемещать с помощью винтовых конвейеров, снабженных фасонными лопастями или лопастями в виде лопаток.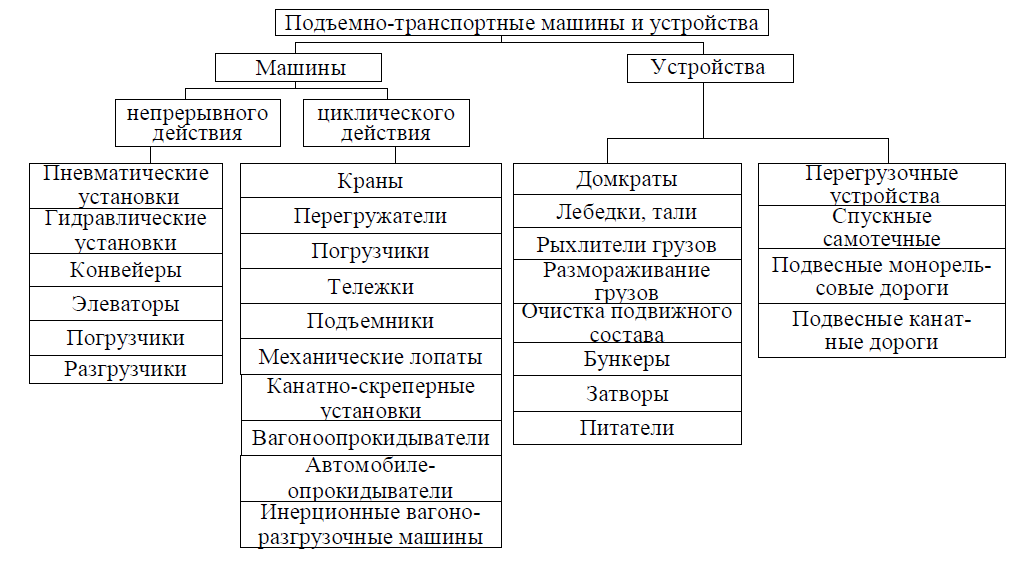 Для предотвращения заедания лопастей необходимо следить за тем, чтобы средний размер кусков перемещаемого материала не превышал 8% от величины шага винтовой лопасти и 25% при транспортировании сыпучего материала.
Для предотвращения заедания лопастей необходимо следить за тем, чтобы средний размер кусков перемещаемого материала не превышал 8% от величины шага винтовой лопасти и 25% при транспортировании сыпучего материала.
Элеваторы (рис. 51) —это конвейеры для транспортирования грузов в ковшах, жестко прикрепленных к тяговому элементу, в вертикальном или крутонаклонном направлении. Элеваторы состоят из вертикального короба, внутри которого перемещается бесконечная цепь или лента с равномерно закрепленными на ней грузовыми ковшами или грузоприемнымй площадками. Элеваторы способны поднимать грузы на высоту до 50 м при производительности до 400 м3/ч.
Рис. 50. Винтовой конвейер:
а — схема, б — формы винтовых лопастей; 1 — сплошные, // — ленточные, /// — фасонные, IV — в виде лопаток; 1 — элек» тродвигатель, 2 — редуктор, 3 — желоб, 4, 6 — разгрузочное и загрузочное отверстия, 5 — вал с винтовыми лопастями
Рис. 51. Элеваторы:
а — цепной, б — ленточный, в — загрузка элеватора, г — разгрузка элеватора; 1 — цепь, 2 — ковш, 3 — лента
Вибрационные конвейеры — это качающиеся конвейеры, в которых груз перемещается микробросками с отрывом части груза от желоба. Вибрационные конвейеры представляют собой слегка наклоненные под углом 5—15° в сторону разгрузки металлические желоба, к которым подключены вибраторы. В отдельных случаях с помощью вибрационных конвейеров можно подавать материалы под небольшим наклоном вверх. Материал перемещается по вибрационному конвейеру за счет колебаний, сообщаемых желобу.
Вибрационные конвейеры представляют собой слегка наклоненные под углом 5—15° в сторону разгрузки металлические желоба, к которым подключены вибраторы. В отдельных случаях с помощью вибрационных конвейеров можно подавать материалы под небольшим наклоном вверх. Материал перемещается по вибрационному конвейеру за счет колебаний, сообщаемых желобу.
Широко распространена виброхоботы, предназначенные для подачи бетонной смеси на глубину до 80 м и обеспечивающие возможность транспортирования не только по вертикали, но и по горизонтали. Для подачи сыпучих и пластичных материалов на небольшое расстояние применяют вибропитатели (рис. 52), оборудованные виброжелобами.
Пневмотранспортные устройства предназначены для подачи сыпучих и пластичных материалов с.помощью сжатого воздуха. Принцип действия пневмотранспортных устройств заключается в транспортировании частичек материала во взвешенном состоянии в потоке воздуха. По конструкции (рис. 53) пневмотранспортные устройства бывают вакуумными и нагнетательными.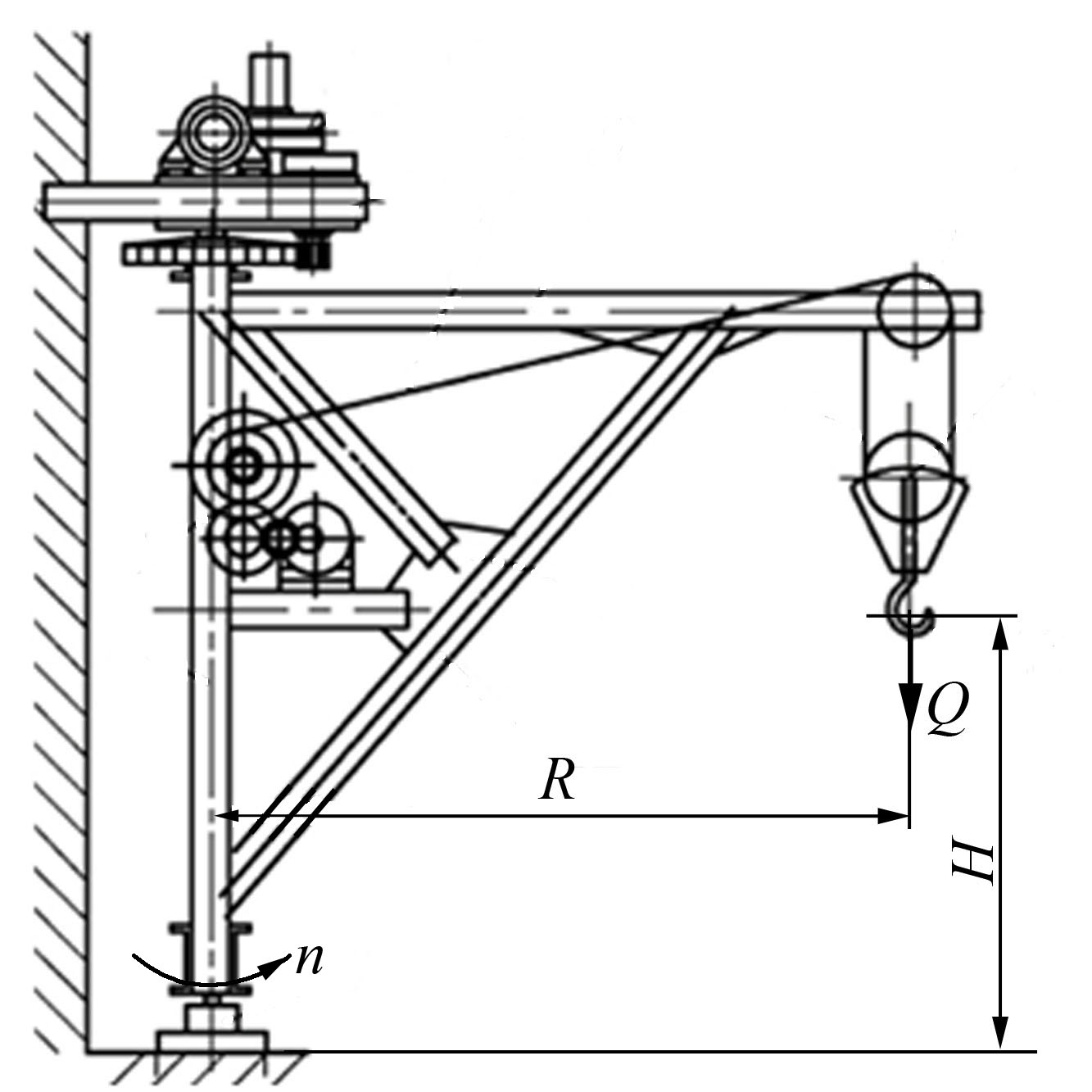
Рис. 52. Вибропитатель с виброжелобом: 1 — вибраторы, 2 — виброжелоб, 3 — вибропитатель
В первом случае воздушный насос высасывает из системы воздух, который захватывает частицы материала через сопло и перемещает их в разгружатель материала, откуда он через герметический затвор поступает в приемный бункер. Для удаления из воздуха оставшихся в нем частичек в отводной ветви трубопровода устанавливают дополнительный фильтр.
Рис. 53. Схемы пневмотранспортных устройств:
а — вакуумного, б — нагнетательного; 1 — сопло, 2 — разгружатель, 3 — затвор, 4 — фильтр, 5 — воздушный насос, 6 — приемный бункер, 7 — трубопровод
Во втором случае воздушный насос нагнетает воздух в трубопровод, в который из бункера подается материал, предназначенный для транспортирования. Так же как в первом случае, материал выгружается в разгружатель, а на выходном трубопроводе устанавливают пылевой фильтр.
С помощью пневмотранспортных устройств можно подавать материалы на расстояние до 2 км.
Классификация подъемно-транспортных машин и их назначение
Подъемно-транспортные машины можно подразделить по направлению движения груза, принципу действия, положению двигателя по отношению к перемещаемому грузу, а также по соединению разнотипных механизмов в агрегатные и комбинированные многооперационные машины.
По направлению движения груза машины подразделяются на подъемные и транспортные. Подъемные машины служат в основном для вертикального перемещения груза, а транспортные — для горизонтального.
По принципу действия машины, перемещающие груз непрерывно, без остановки их на загрузку и разгрузку, при непрерывном движении тягового органа в одном направлении, носят название машин непрерывного действия. К ним относятся лесотранспортеры всех видов.
Если машина останавливается на период загрузки и разгрузки и ее ход с грузом чередуется с ходом без груза, она называется машиной периодического действия. Работа таких машин состоит из ряда циклов, включающих следующие операции: прицепку или захват груза, рабочий ход, отцепку или разгрузку и обратный ход.
Машины периодического действия составляют большую группу, в которую входят канатные установки, краны, манипуляторы, машины лесосечного и лесоскладского транспорта. Заблаговременная покупка запчастей для спецтехники оптом является отличным выходом в случае неисправностей при интенсивных работах с данным видом техники.
В подъемно — транспортных машинах двигатель может перемещаться вместе с грузом или оставаться неподвижным. Так, при транспортировке груза тракторами, автопогрузчиками, автолесовозами двигатель этих машин перемещается вместе с грузом. У лесотранспортеров, канатных установок и отчасти у кранов двигатель приводного механизма не изменяет своего положения, а груз перемещается посредством тягового органа.
Многие из подъемно — транспортных машин соединяют в себе два или более разнотипных механизма — для горизонтального перемещения и для подъема груза. Некоторые из таких агрегатных машин приспособлены в основном для транспортирования груза, т. е. перемещения на большие расстояния, и подъемный механизм в них по устройству отличный от транспортного, служит для загрузки и разгрузки транспортного устройства.
перемещения на большие расстояния, и подъемный механизм в них по устройству отличный от транспортного, служит для загрузки и разгрузки транспортного устройства.
Такие машины могут быть названы транспортно — подъемными. К ним можно отнести автопогрузчики, автолесовозы, трелевочные тракторы и т. д. Другие машины предназначены в основном для подъема груза. В них механизм транспортирования является вспомогательным. Они относятся к подъемно — транспортным агрегатным машинам. Это стреловые и отчасти мостовые краны, челюстные тракторные погрузчики и т. д. Кабельные и мостовые краны больших пролетов в равной степени могут быть названы как подъемно — транспортными, так и транспортно — подъемными агрегатными машинами.
В некоторых случаях на транспортную или подъемно — транспортную машину помещают механизмы и устройства для обработки дерева. Такие машины следует отнести к многооперационным (например, валочно — трелевочные, валочно — пакетирующие, валочно — раскряжевочные, сучкорезно — раскряжевочные).
Разработка новой обмотки с переключением полюсов для подъемно-транспортных механизмов
Открытый доступ
| Проблема | E3S Web of Conf. Том 365, 2023 IV Международная научная конференция «Строительная механика, гидравлика и гидротехника» (КОНМЕХИДРО — 2022) | |
|---|---|---|
| Номер статьи | 04024 | |
| Количество страниц) | 10 | |
| Секция | Механизация, электрификация сельского хозяйства и возобновляемые источники энергии | |
| ДОИ | https://doi.org/10.1051/e3sconf/202336504024 | |
| Опубликовано онлайн | 30 января 2023 г. | |
E3S Web of Conferences 365 , 04024 (2023)
М.К. Бобожанов *, Д.А. Рисмухамедов, Ф.Н. Туйчиев и Х.Ф. Шамсутдинов
Ташкентский государственный технический университет имени Ислама Каримова, Ташкент, Узбекистан
* Автор, ответственный за переписку: mbobojanov@yahoo. com
com
Реферат
Во многих отраслях промышленности используются подъемно-транспортные машины, в частности краны, конвейеры , и подъемники. Учитывая их широкую распространенность и большую установленную мощность, а также сложность режима эксплуатации особое внимание уделяется созданию новых энерго- и ресурсосберегающих электроприводов, облегчающих процесс пуска и обеспечивающих точную остановку высокоинерционные подъемно-транспортные механизмы. В этом направлении одной из приоритетных задач является разработка двухскоростных двигателей с переключением полюсов, отвечающих требованиям электропривода подъемно-транспортных механизмов. На основе метода «Дискретно-заданных пространственных функций» получена обмотка с переключением полюсов для соотношения полюсов 1/5 на 30 пазов статора. Анализ электромагнитных свойств разработанной обмотки переключения полюсов показал, что по сравнению с близким аналогом дифференциальный коэффициент рассеяния на стороне p=1 полюса снижается с 1,7% до 1,3%, а на стороне p=5 полюс уменьшается с 15,9% до 9,7%, а также в картине магнитодвижущей силы наличие высших гармоник со стороны первой скорости уменьшается до 6%, а со второй скорости до 20%.
© The Authors, опубликовано EDP Sciences, 2023
Это статья с открытым доступом, распространяемая в соответствии с лицензией Creative Commons Attribution License 4.0, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии, что оригинал работа цитируется правильно.
Текущие показатели использования показывают совокупное количество просмотров статей (полные просмотры статей, включая просмотры HTML, загрузки PDF и ePub, согласно имеющимся данным) и просмотров рефератов на платформе Vision4Press.
Данные соответствуют использованию на платформе после 2015 года. Текущие показатели использования доступны через 48-96 часов после онлайн-публикации и обновляются ежедневно в рабочие дни.
Глава 2. Механизмы и простые машины
Йи Чжан
с
Сьюзен Фингер
Стефани Беренс
Содержание
Механизм : основные физические или химические процессы
участвует или несет ответственность за действие, реакцию или другое естественное
явление.
Машина : совокупность частей, передающих усилия, движение
и энергии в заданном порядке.
Простая машина : любой из различных элементарных механизмов, имеющих
элементы, из которых состоят все машины. Включен в
этой категории являются рычаг, колесо и ось, шкив, наклонная плоскость,
клин и винт.
Слово механизм имеет много значений. В кинематике механизм является средством
передача, контроль или ограничение относительного движения (Hunt 78). Движения, которые
с электрическим, магнитным, пневматическим управлением исключены из
понятие механизма. Центральная тема для механизмов — жесткая
тела, соединенные между собой суставами.
Машина представляет собой комбинацию жестких или прочных корпусов,
образованы и связаны так, что они движутся с определенными относительными движениями
и передавать силу от источника энергии к сопротивлению,
преодолеть. У машины две функции: передача определенных относительных
движения и передачи силы. Эти функции требуют силы
Эти функции требуют силы
и жесткость для передачи усилий.
Термин механизм применяется к комбинации
геометрические тела, составляющие машину или часть машины. А
механизм поэтому может быть определен как комбинация
твердые или сопротивляющиеся тела, сформированные и соединенные таким образом, что они движутся с
определенные относительные движения по отношению друг к другу (Ham и др. 58).
Хотя действительно твердого корпуса не существует, многие инженеры
компоненты являются жесткими, потому что их деформации и искажения
пренебрежимо малы по сравнению с их относительными движениями.
сходство между машинами и механизмами является
что
- обе комбинации твердых тел
- относительное движение твердых тел определено.
разница между машиной и механизмом заключается в следующем.
что машины преобразуют энергию для выполнения работы, а механизмы — нет.
обязательно выполняют эту функцию. Термин машины
обычно означает машины и механизмы. Рисунок 2-1
показывает изображение основной части дизельного двигателя.
механизм его цилиндро-шатунно-кривошипных частей представляет собой ползун-кривошип
механизм , как показано на рис. 2-2.
цилиндр в дизельном двигателе
2.1 Наклонная плоскость
На рис. 2-3а показан наклонный .
самолет , AB — основание, BC — высота, AC — наклон .
самолет . С помощью наклонной плоскости заданное сопротивление может
преодолеваться с меньшей силой, чем если бы самолет не использовался. Для
Например, на рис. 2-3b предположим, что мы хотим поднять
вес 1000 фунтов через вертикальное расстояние до н.э. = 2 фута. Если это
вес был поднят вертикально и без использования наклонного
плоскости сила 1000 фунтов должна быть приложена через расстояние
ДО Н. Э. Если, однако, используется наклонная плоскость и вес перемещается
Э. Если, однако, используется наклонная плоскость и вес перемещается
над его наклонной плоскостью АС сила всего 2/3 от 1000 фунтов или 667
фунт необходим, хотя эта сила действует на расстоянии AC
что больше расстояния BC.
Использование наклонной плоскости требует меньшего усилия
на большее расстояние, чтобы совершить определенную работу.
Пусть F представляет собой силу, необходимую для подъема заданного веса на
наклонная плоскость и W вес, который нужно поднять, мы имеем пропорцию:
2.1.1 Винтовой домкрат
Одно из наиболее распространенных применений принципа наклонная плоскость находится в винте
домкрат , который используется для преодоления сильного давления или подъема
большой вес W гораздо меньшей силой F , приложенной к
рукоять. R обозначает длину ручки, а P
шаг винта, или расстояние продвижения на один
полный поворот.
В пренебрежении трением используется следующее правило: Сила Ф
умножить на расстояние, которое он проходит за один полный оборот
равен произведению поднятого веса на расстояние, которое он преодолел
подняли за это же время. За один полный оборот конец ручки
описывает окружность 2 R . Это
расстояние, на котором действует сила F .
Поэтому из правила выше
и
Предположим, что R равно 18 дюймам, P соответствует 1/8 дюйма, а вес
которую нужно поднять, равна 100 000 фунтов, тогда сила, необходимая при F
тогда 110 фунтов. Это означает, что, пренебрегая трением, 110 фунтов при
F поднимет 100 000 фунтов на W , но вес поднялся
движется намного медленнее, чем сила, приложенная к F .
2.2 Шестерни
Шестерня или зубчатое колесо во время работы могут фактически
рассматривается как рычаг с дополнительной функцией, заключающейся в том, что его можно вращать
непрерывно, вместо того, чтобы раскачиваться вперед и назад в течение короткого
расстояние. Одним из основных соотношений для шестерни является число
Одним из основных соотношений для шестерни является число
зубьев, диаметр и скорость вращения зубчатых колес. На рис. 2-5 показаны концы двух валов A и B.
соединены двумя шестернями по 24 и 48 зубьев соответственно. Обратите внимание, что
большая шестерня сделает только пол-оборота, а меньшая сделает
полный поворот. То есть отношение скоростей (скоростей)
большое к меньшему как 1 к 2.
Шестерня, расположенная ближе к источнику энергии, называется
водитель , а шестерня, которая получает питание от водителя,
называется ведомая шестерня .
2.2.1 Зубчатые передачи
Зубчатая передача может иметь несколько ведущих и несколько ведомых шестерен.
Когда шестерня А поворачивается один раз по часовой стрелке, шестерня В поворачивается 4 раза
против часовой стрелки, а шестерня C повернется один раз по часовой стрелке. Следовательно, шестерня B делает
Следовательно, шестерня B делает
не изменить скорость C по сравнению с тем, что было бы, если бы редуктор
прямо на передачу А, но она меняет свое направление с против часовой стрелки
по часовой стрелке.
Соотношение скоростей первой и последней передачи в простой зубчатой передаче.
доза не меняется, если между ними поставить любое количество шестерен.
На рис. 2-7 показаны составные шестерни , в которых
две шестерни на среднем валу. Шестерни B и D вращаются одновременно.
скорости, так как они соединены шпонкой (закреплены) с одним и тем же валом. Количество
количество зубьев на каждой шестерне указано на рисунке. Учитывая эти числа, если
шестерня А вращается со скоростью 100 об/мин. по часовой стрелке, шестерня B поворачивается на 400
об/мин (оборотов в минуту) против часовой стрелки и шестерня C поворачивается на 1200
об/мин по часовой стрелке.
Рисунок 2-7
Составные шестерни
2.2.2 Передаточное число
Важно при работе с шестернями знать, какое количество зубьев
шестерни должны иметь так, чтобы они могли правильно зацепиться в зубчатой передаче.
Размер зубьев для соединения шестерен должен соответствовать друг другу.
2.3 Ремни и шкивы
Ремни и шкивы являются важной частью
большинство машин. Шкивы не что иное, как шестеренки без
зубы, и вместо того, чтобы двигаться вместе, они созданы для того, чтобы водить
друг друга с помощью шнуров, веревок, тросов или каких-либо ремней.
Как и в случае с зубчатыми колесами, скорость шкивов обратно пропорциональна
их диаметры.
Рисунок 2-8
Ремни и шкивы
Шкивы также могут быть расположены в виде блока и тали.
2.4 Рычаг
2.5 Колесо и ось
2,6 Клин
2.7 Эффективность машин
При отработке задач на рычаги , ремни и
шкивы , наклонные плоскости и пр. мы не брали
счет трения или других источников потери энергии. Другими словами,
мы предполагаем, что они совершенны, хотя на самом деле это не так. К
измерить производительность машины, мы часто находим ее
эффективность , которая определяется как
где
- = эффективность
машины,- W в = ввод работы в машину, и
- W out = выходная работа машины.

- W в = ввод работы в машину, и
