Содержание
Изменение скорости вращения ротора асинхронного двигателя | Эксплуатация электрических машин и аппаратуры | Архивы
- 6кВ
- 0,4кВ
- трансформатор
- эксплуатация
- подстанция
- 10кВ
- заземление
Содержание материала
- Эксплуатация электрических машин и аппаратуры
- Волокнистые, стеклянные и асбестовые материалы, бумага
- Проводниковые материалы
- Сведения об электрических машинах переменного тока
- Однослойные трехфазные обмотки машин переменного тока
- Трехфазные двухслойные обмотки машин переменного тока
- Обмотки однофазных машин переменного тока
- Асинхронные двигатели
- Принцип работы асинхронного двигателя
- Пуск трехфазных асинхронных двигателей
- Регулировка скорости вращения асинхронных двигателей
- Однофазные асинхронные двигатели
- Синхронные машины
- Принцип работы синхронного генератора
- Характеристики синхронных генераторов
- Синхронные двигатели
- Трансформаторы
- Работа трансформаторов
- Трехфазные трансформаторы
- Специальные трансформаторы
- Другие специальные трансформаторы
- Машины постоянного тока
- Генераторы постоянного тока
- Двигатели постоянного тока
- Сварочные генераторы
- Рубильники и пакетные выключатели
- Контакторы и магнитные пускатели
- Реостаты
- Предохранители
- Работа трехфазных асинхронных двигателей в однофазных сетях
- Изменение скорости вращения ротора асинхронного двигателя
- Особые режимы работы трехфазного асинхронного двигателя
- Параллельная работа трансформаторов
- Параллельная работа синхронных генераторов
- Система технического обслуживания электрооборудования
- Условия эксплуатации и выбор электрооборудования
- Хранение, транспортировка и монтаж электрооборудования
- Техническое обслуживание асинхронных двигателей
- Проверка сети при пуске асинхронных двигателей
- Эксплуатационные характеристики асинхронного двигателя
- Дефектовка собранного асинхронного двигателя
- Техническое обслуживание генераторов
- Техническое обслуживание трансформаторов
- Аварийные перегрузки, короткие замыкания, несимметричные режимы трансформаторов
- Эксплуатация масла, влагообмен в трансформаторах
- Текущий ремонт трансформаторов
- Техническое обслуживание сварочного электрооборудования
- Устранение неисправностей сварочного оборудования
- Неисправности трехфазных асинхронных двигателей
- Различные неисправности трехфазных асинхронных двигателей
- Неисправности машин постоянного тока
- Неисправности трансформаторов
- Неисправности сварочных аппаратов
- Неисправности реакторов, пускателей и контакторов
- Сушка электромашин
- Сушка обмоток силовых трансформаторов
- Определение качества трансформаторного масла
- Маркировка выводных концов электромашин и трансформаторов
- Опытное определение группы трансформатора
- Определение паспорта электромашин и трансформаторов
- Механические неисправности электромашин
- Неисправности коллекторов
- Неисправности обмоток электромашин
- Повреждения обмоток электромашин
- Неисправности силовых трансформаторов
- Мастерская электрика
- Приборы, испытательные щиты, приспособлении и инструмент
- Технологическая планировка мастерской
- Техника безопасности, поражение током
- Помещения и электрооборудование по признаку электробезопасности
- Заземление электроустановок
- Ответственность за безопасность при обслуживании и ремонте электроустановок
- Эксплуатация электроустановок
- Некоторые случаи травматизма
Страница 31 из 74
В условиях эксплуатации электроустановок иногда возникает необходимость изменить поминальную скорость вращения ротора короткозамкнутых двигателей. В ряде случаев переключение данной обмотки статора двигателя на другое число полюсов предпочтительнее, чем перемотка двигателя на другую скорость, так как переключить обмотку можно сравнительно быстро без затраты обмоточного провода. Можно переключать на большую и меньшую скорость вращения обмотки двигателей присоединением в лобовых частях.
В ряде случаев переключение данной обмотки статора двигателя на другое число полюсов предпочтительнее, чем перемотка двигателя на другую скорость, так как переключить обмотку можно сравнительно быстро без затраты обмоточного провода. Можно переключать на большую и меньшую скорость вращения обмотки двигателей присоединением в лобовых частях.
Переключать асинхронные двигатели на большую скорость вращения можно при однослойной и двухслойной обмотке на статоре.
При наличии на статоре однослойной обмотки (двухплоскостной или цепной не «вразвалку») увеличить скорость вращения ротора двигателя можно лишь вдвое. Число пар полюсов исходной обмотки должно быть четным, то есть скорость вращения до его переключения должна быть примерно 1500 и 750 об/мин. Увеличение скорости вращения ротора двигателя с однослойной обмоткой на статоре достигается изменением направления тока в получастях фаз на каждых четырех соседних полюсах исходной обмотки. При переключении двигателя с 1500 на 3000 об/мин (синхронных) достаточно изменить направление токов в полуфазах обмотки. На рисунке 101 показана принципиальная схема переключения одной фазы двигателя с однослойной обмоткой на вдвое большую скорость вращения.
На рисунке 101 показана принципиальная схема переключения одной фазы двигателя с однослойной обмоткой на вдвое большую скорость вращения.
При переключении статорной обмотки на меньшее число полюсов изменяется градусное выражение зубцового деления.
Поэтому начало средней фазы переносится в другую катушечную группу, чтобы и при большей скорости вращения получить пространственное смещение фазных обмоток в 120 эл. градусов.
Рис. 101. Принципиальная схема переключения фазы двигателя с меньшей (а) на большую (б) скорость вращения.
Переключение асинхронных двигателей с однослойной обмоткой на большую скорость вращения приводит к значительному искажению магнитного поля. По этой причине переключенный двигатель при пуске застревает примерно на 1/7, новой номинальной скорости вращения. Для устранения явления задержки ротора при разбеге двигатель нужно пускать на меньшей скорости, а затем переключать на большую. В этом случае получается двухскоростной двигатель с девятью свободными концами обмотки статора. Принципиальная схема двухскоростного двигателя показана на рисунке 102. Для управления двигателем можно использовать многоконтактный пакетный переключатель или два трехполюсных переключателя, как показано на рисунке 102. Для пуска оба переключателя замыкают в верхнее положение, и двигатель разворачивается на меньшей скорости. Затем переключатели одновременно переводят в нижнее положение, двигатель переходит на большую скорость вращения.
Принципиальная схема двухскоростного двигателя показана на рисунке 102. Для управления двигателем можно использовать многоконтактный пакетный переключатель или два трехполюсных переключателя, как показано на рисунке 102. Для пуска оба переключателя замыкают в верхнее положение, и двигатель разворачивается на меньшей скорости. Затем переключатели одновременно переводят в нижнее положение, двигатель переходит на большую скорость вращения.
Рис. 102. Принципиальная схема двухскоростного двигателя, полученного из односкоростного с однослойной обмоткой статора.
Переключение двигателя на большую скорость вращения сопровождается изменением индукции и магнитного потока машины. В результате немного увеличивается нагрев статора. Мощность К. п. д. и cosφ двигателя после переключения на большую скорость при номинальном напряжении не изменяются.
При двухслойной обмотке статора скорость вращения двигателя можно увеличить вдвое (при четном числе полюсов) и на ближайшую большую синхронную скорость.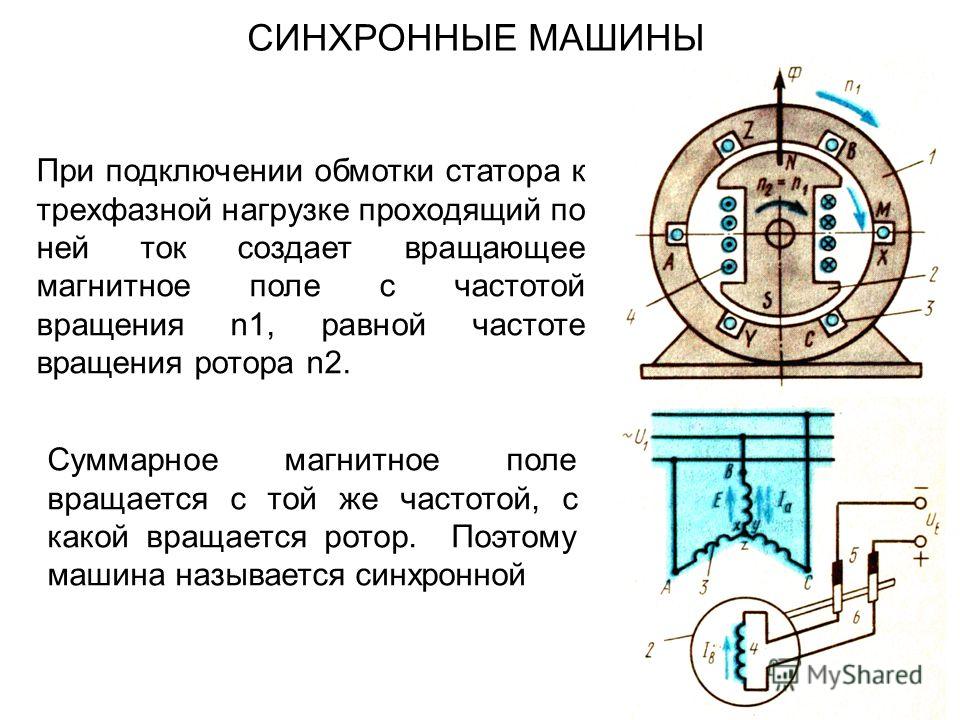
Для увеличения скорости вращения двигателя вдвое необходимо увеличить число катушек в катушечной группе, что достигается последовательным соединением двух соседних катушечных групп в исходной обмотке.
При изменении скорости двигателя на ближайшую большую, например с 1000 на 1500 об/мин, нужно перегруппировать катушки в соответствии с новым числом полюсов обмотки. Для этого следует разъединить некоторые в определенных местах расположенные катушечные группы, чтобы образовать новые с требуемым числом катушек в них. Если обмотка при 1000 об/мин имела в группе по две катушки, то после переключения на 1500 об/мин катушечные группы должны содержать по три катушки. Для получения таких групп шесть групп исходной обмотки, равномерно расположенные по расточке статора, надо разъединить на две катушки и последовательно присоединить по одной к группам, расположенным справа и слева от расчлененной группы.
После образования групп с определенным числом катушек в них соединяют фазы обычным образом для двухслойных обмоток. В результате переключения получается обычная двухслойная обмотка с очень сильным укорочением шага. Это укорочение тем больше, чем на более высокую скорость переключен двигатель.
В результате переключения получается обычная двухслойная обмотка с очень сильным укорочением шага. Это укорочение тем больше, чем на более высокую скорость переключен двигатель.
При неизменном напряжении на фазе двигателя после его переключения значительно возрастает индукция в статоре к ток холостого хода, что в ряде случаев вызывает нагрев к снижает cosφ двигателя. Для устранения этого требуется снижать напряжение на виток, что может быть достигнуто за счет переключения фаз с треугольника на звезду или уменьшения числа параллельных ветвей. При этом мощность двигателя уменьшается. За счет возможного увеличения тока при большей скорости вращения можно несколько повысить допустимую мощность двигателя после переключения при удовлетворительных значениях к. п. д. и соsφ.
Разбег двигателя после переключения на большую скорость удовлетворительный, так как характер магнитного поля не изменяется.
Асинхронный двигатель переключают на меньшую скорость вращения только при двухслойной обмотке на статоре при укороченном шаге.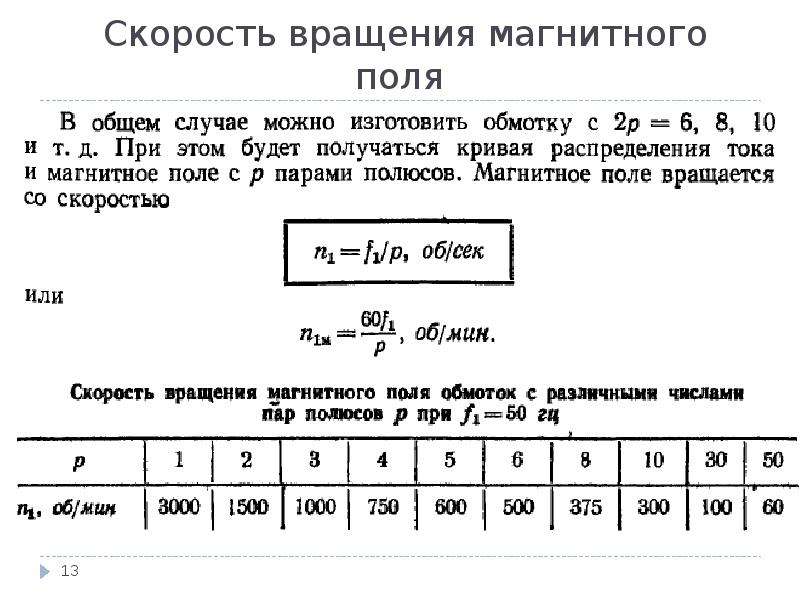 Если шаг обмотки такой Величины, что степень укорочения его при большей скорости вращения не меньше степени удлинения при меньшей скорости, то после переключения обмотки получаются удовлетворительные результаты работы двигателя.
Если шаг обмотки такой Величины, что степень укорочения его при большей скорости вращения не меньше степени удлинения при меньшей скорости, то после переключения обмотки получаются удовлетворительные результаты работы двигателя.
Уменьшить скорость вращения двигателя с двухслойной обмоткой можно вдвое и на ближайшую меньшую синхронную скорость, например, можно переключать с 1500 на 1000 об/мин или с 1000 на 750 об/мин. Для переключения на меньшую скорость вращения необходимо расчленить в лобовых частях катушечные группы исходной обмотки, образовать новые группы с числом катушек в них, соответствующим уменьшенной скорости (большему числу полюсов). Если обмотка при 1500 об/мин имела группы из трех катушек, то при переключении на 1000 об/мин нужно образовать группы по две катушки. Вновь полученные группы для двухслойных обмоток соединяют в фазы.
Уменьшение скорости вращения переключением данной обмотки сопровождается ростом индукции, тока холостого хода, нагрева двигателя при низких к. п. д. и cos φ.
п. д. и cos φ.
Длительная работа двигателя в этих условиях невозможна. Условия тем тяжелее, чем больше снижается скорость вращения двигателя Для устранения этого нужно уменьшить витковое напряжение фазы двигателя. Этого можно достичь, перейдя на ближайшее меньшее стандартное напряжение, переходом от схемы соединения фаз треугольником к звезде и уменьшением параллельных ветвей в фазах.
При переключении двухслойной обмотки на меньшую скорость можно получить двухскоростной двигатель. Наиболее просто это сделать, если переключить скорости с отношением 2:1. Для этого исходная обмотка должна быть со значительно укороченным шагом и иметь по две параллельные ветви в фазах. Меньшая скорость вращения достигается изменением направления тока в соответствующих полуфазах обмотки. Для этого используют удобную схему двойная звезда — одинарная звезда с шестью свободными выводами обмотки. На высшей скорости двигатель работает по схеме двойная звезда, на меньшей — по схеме одинарная звезда.
Двигатель с обычной двухслойной обмоткой можно переделать в двухскоростной и с другим соотношением скорости, например 3:2. Такой двигатель для изменения скорости вращения требует сложного переключающего устройства
Такой двигатель для изменения скорости вращения требует сложного переключающего устройства
- Назад
- Вперед
- Назад
- Вперед
- Вы здесь:
- Главная
- Книги
- Архивы
- Приспособления и инструменты для воздушных линий до 10 кВ сельскохозяйственного назначения
Читать также:
- Наладка электроустановок
- Монтаж, эксплуатация и ремонт сельскохозяйственного электрооборудования
- Электрооборудование сельского хозяйства
- Электрические сети промышленных предприятий
- Монтаж электрических установок
Скорость вращения магнитного поля| РЕЖИМЩИК
Если трехфазную обмотку двигателя разместить в шести пазах на внутренней поверхности статора (рис. 1), то за половину периода переменного тока вектор магнитной индукции сделает пол-оборота, а за полный период — один оборот. В этом случае обмотка статора создает магнитное поле с одной парой полюсов и называется двухполюсной.
1), то за половину периода переменного тока вектор магнитной индукции сделает пол-оборота, а за полный период — один оборот. В этом случае обмотка статора создает магнитное поле с одной парой полюсов и называется двухполюсной.
Если обмотка статора состоит из шести катушек (по две последовательно соединенные катушки на каждую фазу), размещенных в двенадцати пазах, то за половину периода переменного тока вектор магнитной индукции повернется на четверть оборота, а за полный период — на пол-оборота. Вместо двух полюсов на трех обмотках теперь магнитное поле статора имеет четыре полюса (две пары полюсов).
Рисунок 1
Таким образом, если обмотка статора имеет 2, 3, 4 и т.д. пары полюсов, то вектор магнитной индукции за время одного периода изменения тока повернется соответственно на 1/2, 1/3, 1/4 и т.д. часть окружности статора. В общем случае, обозначив буквой р число пар полюсов, мы можем сделать вывод, что угол, описанный вектором магнитной индукции за время одного периода изменения тока, равен одной р-й части окружности статора и, следовательно, скорость вращения магнитного поля n1 обратно пропорциональна числу пар полюсов: n1 = (60f) / p (об/мин)
где f — частота переменного тока в Гц, а коэффициент 60 появился из-за того, что n1, принято измерять в оборотах в минуту.
Поскольку число пар полюсов может быть только целым, то скорость вращения магнитного поля может принимать не произвольные, а только определенные значения:
Ротор асинхронного двигателя вращается в ту же сторону, что и магнитное поле, со скоростью, несколько меньшей скорости вращения магнитного поля, так как только в этом случае в обмотке ротора будут индуцироваться ЭДС и токи и на ротор будет действовать вращающий момент. Обозначим скорость вращения ротора n2. Тогда величина n1 — n2, которая называется скоростью скольжения, представляет собой относительную скорость магнитного поля и ротора, а степень отставания ротора от магнитного поля, выраженная в процентах, называется скольжением s:
s = ((n1 – n2) / (n1)) 100 %
Скольжение асинхронного двигателя при номинальной нагрузке обычно составляет 3-7 %. При увеличении нагрузки скольжение увеличивается и двигатель может остановиться.
Вращающий момент М асинхронного двигателя создается благодаря взаимодействию магнитного потока поля статора Ф с индуцированным в обмотке ротора током I2, поэтому величина его пропорциональна произведению I2Ф .
Так как в механическую работу на валу двигателя может превращаться только активная мощность, то вращающий момент будет создаваться активной составляющей тока, равной I2 cosφ2, где φ2 — угол сдвига фаз между током и ЭДС ротора. В окончательном виде выражение для вращающего момента имеет вид: M = cФI2cosφ2
где с — коэффициент, зависящий от конструктивных данных двигателя.
Двигатель будет работать устойчиво, с постоянной скоростью ротора при равновесии моментов, т. е. тогда, когда вращающий момент Мвр равен тормозному моменту на валу двигателя Мтор: Мвр = Мтор
Любой нагрузке машины соответствует определенное число оборотов ротора n2 и определенное скольжение s.
Магнитное поле статора вращается относительно ротора со скоростью n1 — n2 и индуцирует в его обмотке ЭДС Е2, под действием которой по замкнутой обмотке ротора протекает ток I2.
Если нагрузка на валу двигателя увеличилась, т. е. увеличился тормозной момент, то равновесие моментов будет нарушено. Это приведет к уменьшению числа оборотов ротора, т. е. к увеличению скольжения. С увеличением скольжения магнитное поле статора чаще пересекает проводники обмотки ротора и индуцированная в обмотке ротора ЭДС Е2 возрастает, а следовательно, увеличивается ток в роторе и развиваемый двигателем вращающий момент. Увеличение скольжения и тока в роторе будет происходить до тех пор, пока не наступит равновесие моментов, т. е. вращающий момент не станет равен тормозному.
Аналогично протекает процесс изменения числа оборотов ротора и развиваемого момента при уменьшении нагрузки двигателя. При уменьшении нагрузки на валу двигателя тормозной момент станет меньше вращающего, что приведет к увеличению числа оборотов ротора, т. е. к уменьшению скольжения. С уменьшением скольжения уменьшаются ЭДС и ток в обмотке ротора и, следовательно, вращающий момент уменьшается до значения, равного тормозному.
При уменьшении нагрузки на валу двигателя тормозной момент станет меньше вращающего, что приведет к увеличению числа оборотов ротора, т. е. к уменьшению скольжения. С уменьшением скольжения уменьшаются ЭДС и ток в обмотке ротора и, следовательно, вращающий момент уменьшается до значения, равного тормозному.
Учебная серия по электротехнике и электронике ВМФ (NEETS), модуль 5, с 4-11 по 4-18
NEETS Модуль 5 – Введение в генераторы и двигатели
Страницы i,
1−1,
1−11,
1−21,
1−31,
2−1,
2−11,
3−1,
3−11,
4−1,
4−11, индекс
очередь. Для получения максимального
взаимодействия между полями воздушный зазор между ротором и статором очень мал.
Как известно из
Согласно закону Ленца, любая индуцированная ЭДС пытается противодействовать изменяющемуся полю, которое ее вызывает. В случае асинхронного двигателя
изменяющееся поле есть движение результирующего поля статора. на ротор действует сила ЭДС индукции
на ротор действует сила ЭДС индукции
и результирующее магнитное поле. Эта сила стремится отменить относительное движение между ротором и статором.
поле. В результате ротор движется в том же направлении, что и вращающееся поле статора.
Невозможно
чтобы ротор асинхронного двигателя вращался с той же скоростью, что и вращающееся магнитное поле. Если бы скорости были
то же самое, не было бы относительного движения между полями статора и ротора; без относительного движения там
в роторе не будет наведенного напряжения. Чтобы между ними существовало относительное движение, ротор должен
вращаться со скоростью меньшей, чем у вращающегося магнитного поля. . разница между скоростью движения
вращающееся поле статора и скорость вращения ротора называется скольжением. Чем меньше скольжение, тем ближе скорость ротора
приближается к скорости поля статора.
Скорость ротора зависит от требований к крутящему моменту нагрузки. Чем больше нагрузка, тем сильнее
Чем больше нагрузка, тем сильнее
сила вращения, необходимая для вращения ротора. Поворотная сила может увеличиться только при увеличении ЭДС ротора.
Эта ЭДС может увеличиваться только в том случае, если магнитное поле проходит через ротор с большей скоростью. Для увеличения относительного
скорости между полем и ротором, ротор должен замедлиться. Поэтому для более тяжелых нагрузок асинхронный двигатель
вращается медленнее, чем при более легких нагрузках. Из предыдущего утверждения видно, что скольжение прямо пропорционально
нагрузка на двигатель. На самом деле для обычных изменений тока необходимо лишь незначительное изменение скорости.
требуется для нормального изменения нагрузки. Это связано с тем, что обмотки ротора имеют такое низкое сопротивление. Как результат,
асинхронные двигатели называются двигателями с постоянной скоростью.
Q8. Почему асинхронный двигатель переменного тока используется чаще
чем другие виды?
Q9. Скорость ротора всегда несколько меньше скорости вращающегося поля. В чем разница
Скорость ротора всегда несколько меньше скорости вращающегося поля. В чем разница
называется?
Q10. От чего зависит величина скольжения в асинхронном двигателе?
ОДНОФАЗНЫЕ АИНХОННЫЕ ДВИГАТЕЛИ
Однофазные асинхронные
двигателей, используемых сегодня, чем общее количество всех других типов вместе взятых.
Логично, что наименьший
чаще всего следует использовать дорогой тип двигателя переменного тока с минимальными затратами на техническое обслуживание. Однофазный асинхронный двигатель подходит
это описание.
В отличие от многофазных асинхронных двигателей поле статора однофазного двигателя не
вращать. Вместо этого он просто меняет полярность между полюсами, когда переменное напряжение меняет полярность.
Напряжение
индуцируется в роторе в результате магнитной индукции, и вокруг ротора создается магнитное поле. Этот
поле всегда будет противоположно полю статора (применяется закон Ленца). Взаимодействие между ротором и
Взаимодействие между ротором и
Однако поля статора не будут производить вращение. Взаимодействие показано двусторонней стрелкой на рисунке.
4-10, вид А. Поскольку эта сила действует на ротор и на полюсные наконечники, вращательного движения нет, а только
толчок и/или тяга вдоль этой линии.
4-11
Рис. 4-10. — Роторные токи однофазного асинхронного двигателя переменного тока.
Теперь, если ротор вращается какой-то внешней силой (поворотом руки или чем-то еще), двухтактный
линия на рис. 4-10, вид А, нарушена. Посмотрите на поля, как показано на рисунке 4-10, вид B. В этом
момент, когда южный полюс ротора притягивается левым полюсом. Северный полюс ротора находится
притягивается к правому полюсу. Все это результат вращения ротора 90º внешней силой.
Притяжение, которое теперь существует между двумя полями, становится вращательной силой, поворачивая ротор в сторону магнитного поля.
переписка со статором. Поскольку два поля постоянно чередуются, они никогда не выстроятся в линию.
и ротор будет продолжать вращаться после запуска. Нам остается научиться практическим методам получения
ротор для запуска.
В настоящее время используется несколько типов однофазных асинхронных двигателей. В основном они
идентичны, за исключением средств запуска. В этой главе мы обсудим расщепленную фазу и затененный полюс.
моторы; названы так из-за методов, используемых для их запуска. Как только они наберут рабочую скорость, все
однофазные асинхронные двигатели работают одинаково.
Q11. Какой тип двигателя переменного тока наиболее распространен?
Двухфазные асинхронные двигатели
Один тип асинхронного двигателя, который включает в себя пусковое устройство, называется асинхронным двигателем с расщепленной фазой.
Двигатели с расщепленной фазой предназначены для использования индуктивности, емкости или сопротивления для создания пускового момента.
принципы — это те, которые вы узнали при изучении переменного тока.
Конденсатор-СТАРТ . —
Первый тип асинхронного двигателя с расщепленной фазой, который будет рассмотрен, — это двигатель с конденсаторным пуском. Рисунок 4-11 показывает
упрощенная схема типичного двигателя с конденсаторным пуском. Статор состоит из основной обмотки и пускового
обмотка (вспомогательная). Пусковая обмотка включена параллельно основной обмотке и размещена физически
под прямым углом к ней. 90-градусный электрический
4-12
разность фаз между двумя обмотками получается путем последовательного соединения вспомогательной обмотки
с конденсатором и пусковым ключом. При первом включении двигателя пусковой выключатель замкнут. Этот
Поместите конденсатор последовательно с вспомогательной обмоткой. Конденсатор такой емкости, что вспомогательный
цепь фактически представляет собой резистивно-емкостную цепь (называемую емкостным реактивным сопротивлением и выражаемую как X С ).
В этой цепи ток опережает линейное напряжение примерно на 45° (поскольку X C примерно равно R). Главный
обмотка имеет достаточное сопротивление-индуктивность (называемое индуктивным сопротивлением и выражаемое как X L ) для
привести к отставанию тока от линейного напряжения примерно на 45º (поскольку X L примерно равно R). Токи в
поэтому каждая обмотка сдвинута по фазе на 90º, как и генерируемые магнитные поля. Эффект в том, что
две обмотки действуют как двухфазный статор и создают вращающееся поле, необходимое для запуска двигателя.
Рис. 4-11. — Конденсаторный пуск, асинхронный двигатель переменного тока.
При достижении почти полной скорости центробежное устройство (пусковой выключатель) отключает пусковой механизм.
обмотка. Затем двигатель работает как обычный однофазный асинхронный двигатель. Так как вспомогательная обмотка является только легкой
обмотки двигатель не развивает достаточный крутящий момент для пуска тяжелых нагрузок. Поэтому двигатели с расщепленной фазой
Поэтому двигатели с расщепленной фазой
только в малых размерах.
Сопротивление-СТАРТ . — Другим типом асинхронного двигателя с расщепленной фазой является пусковое сопротивление.
мотор. Этот двигатель также имеет пусковую обмотку (показана на рис. 4-12) в дополнение к основной обмотке. Он переключен
вход и выход из цепи, как это было в двигателе с конденсаторным пуском. Пусковая обмотка расположена справа
углы к основной обмотке. Электрический фазовый сдвиг между токами в двух обмотках получается выражением
делает сопротивление обмоток неравным. Основная обмотка имеет большую индуктивность и низкое сопротивление.
поэтому ток отстает от напряжения на большой угол. Пусковая обмотка рассчитана на довольно низкое
индуктивность и высокое сопротивление. Здесь ток отстает от напряжения на меньший угол. Например, предположим,
ток в основной обмотке отстает от напряжения на 70º. Ток во вспомогательной обмотке отстает от напряжения на
40º. Таким образом, токи сдвинуты по фазе на 30º. Магнитные поля сдвинуты по фазе на такую же величину.
Таким образом, токи сдвинуты по фазе на 30º. Магнитные поля сдвинуты по фазе на такую же величину.
Хотя идеальная угловая разность фаз составляет 90º для максимального пускового момента, разность фаз 30 градусов
по-прежнему генерирует вращающееся поле. Это обеспечивает достаточный крутящий момент для запуска двигателя. Когда мотор подходит к
скорости, переключатель с регулируемой скоростью отключает пусковую обмотку от сети, и двигатель продолжает работать как
асинхронный двигатель. Пусковой момент не так велик, как при конденсаторном пуске.
4-13
Рис. 4-12. — Асинхронный двигатель переменного тока с пусковым сопротивлением.
Q12. Как асинхронные двигатели с расщепленной фазой становятся самозапускающимися?
Асинхронные двигатели с экранированными полюсами
Асинхронный двигатель с экранированными полюсами является еще одним однофазным двигателем.
мотор. Он использует уникальный метод запуска вращения ротора. Эффект движущегося магнитного поля создается
изготовление статора особым образом. Этот двигатель имеет выступающие полюсные наконечники, как и некоторые двигатели постоянного тока. В
кроме того, части поверхности полюсного наконечника окружены медной полосой, называемой затеняющей катушкой. полюсный кусок
с ремешком на месте показано на рис. 4-13. Ремешок заставляет поле двигаться вперед и назад по лицу
полюсного наконечника. Обратите внимание на пронумерованную последовательность и точки на кривой намагничивания на рисунке. Как
переменное поле статора начинает увеличиваться от нуля (1), силовые линии расширяются поперек поверхности полюса
кусок и разрежьте ремешок. в ремешке индуцируется напряжение. Возникающий в результате ток создает поле
противодействует режущему действию (и уменьшает силу) основного поля. Это производит следующее
действия: По мере увеличения поля от нуля до максимума в 90º, большая часть магнитных силовых линий
сосредоточены в незаштрихованной части полюса (1). При 90º поле достигает своего максимального значения. Поскольку линии
При 90º поле достигает своего максимального значения. Поскольку линии
силы перестали расширяться, в ремешке не индуцируется ЭДС и не создается встречное магнитное поле. Как
В результате основное поле равномерно распределяется по полюсу (2). От 90º до 180º начинается основное поле
уменьшается или схлопывается внутрь. Поле, создаваемое в ремешке, противостоит разрушающемуся полю. Эффект заключается в
сконцентрируйте силовые линии в заштрихованной части поверхности полюса (3). Вы можете видеть, что от 0° до 180°,
основное поле сместилось по поверхности полюса от незаштрихованной части к заштрихованной. От 180º до 360º, основной
поле претерпевает те же изменения, что и от 0° до 180°; однако теперь он находится в противоположном направлении (4).
Направление поля не влияет на работу заштрихованного полюса. Движение поля такое же
во второй половине цикла, как и в первой половине цикла.
4-14
Рис. 4-13. — Экранированные полюса, используемые в асинхронных двигателях переменного тока с экранированными полюсами.
4-13. — Экранированные полюса, используемые в асинхронных двигателях переменного тока с экранированными полюсами.
Движение поля вперед и назад между заштрихованными и незаштрихованными участками создает слабый крутящий момент,
запустите двигатель. Из-за слабого пускового момента двигатели с расщепленными полюсами изготавливаются только небольших размеров. Они ведут
такие устройства, как вентиляторы, часы, воздуходувки и электрические бритвы.
Q13. Почему двигатели с расщепленными полюсами используются для
управлять только очень маленькими устройствами?
Скорость однофазных асинхронных двигателей
Скорость асинхронных двигателей зависит от конструкции двигателя. Синхронная скорость (скорость, с которой статор
поле вращается) определяется частотой подводимой мощности переменного тока и количеством полюсов в статоре.
чем больше число полюсов, тем медленнее синхронная скорость.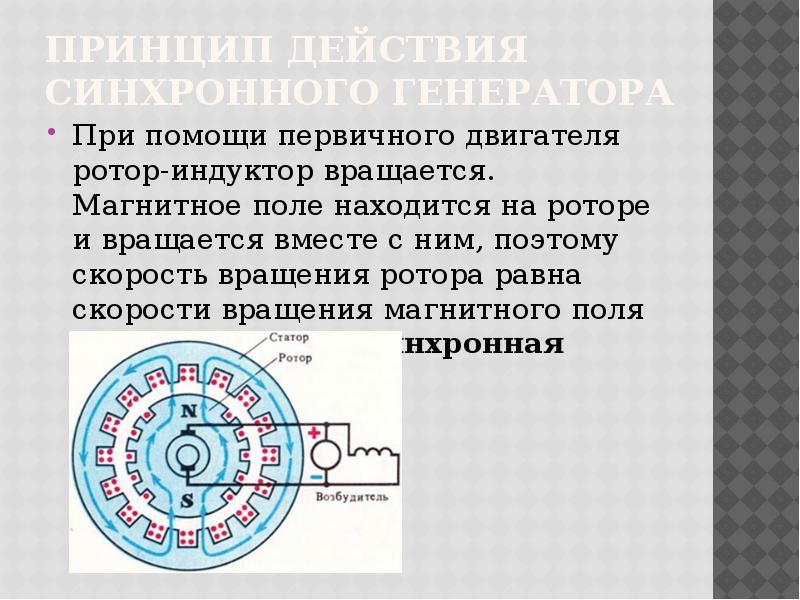 Чем выше частота приложенного напряжения, тем
Чем выше частота приложенного напряжения, тем
выше синхронная скорость. Помните, однако, что ни частота, ни число полюсов не являются переменными. Они
оба фиксируются производителем.
Соотношение между полюсами, частотой и синхронной скоростью следующее:
где n — синхронная скорость в об/мин, f — частота приложенного напряжения в герцах, p —
количество полюсов в статоре.
Давайте рассмотрим пример 4-полюсного двигателя, рассчитанного на работу на частоте 60 Гц.
синхронная скорость определяется следующим образом:
4-15
Общие синхронные скорости для 60-герцовых двигателей составляют 3600, 1800, 1200 и 900 об/мин, в зависимости от номера
столбов в оригинальном исполнении.
Как мы видели ранее, ротор никогда не может достичь синхронного
скорость. Если бы это было так, то в роторе не было бы индуцированного напряжения. Крутящий момент не будет развиваться. Мотор бы
Крутящий момент не будет развиваться. Мотор бы
не работать. Разница между скоростью вращения ротора и синхронной скоростью называется скольжением. Разница между этими
две скорости не очень. Например, при синхронной скорости можно ожидать скорость вращения ротора от 3400 до 3500 об/мин.
3600 об/мин.
Резюме
В этой главе вы познакомились с основными принципами работы двигателей переменного тока. Хотя множество вариаций типов
существуют, три представленных типа предоставят вам основу для дальнейшего изучения, если вам потребуется более обширное
знание предмета. Следующая информация представляет собой краткое изложение основных тем этой главы для
ваш обзор.
Представлены три ТИПА ДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА : серийный, синхронный и
асинхронные двигатели переменного тока.
ДВИГАТЕЛИ серии ПЕРЕМЕННОГО ТОКА практически идентичны двигателям серии постоянного тока.
Специальные технологии конструкции позволяют использовать двигатели переменного тока серии UNIVERSAL MOTORS , работающие
либо на переменном, либо на постоянном токе.
ВРАЩАЮЩИЕСЯ ПОЛЯ образуются путем приложения многофазных напряжений к обмоткам статора, которые
состоят из нескольких катушек возбуждения. Это вращающееся магнитное поле заставляет ротор толкаться и тянуться из-за
взаимодействие между ним и собственным полем ротора.
ДВУХФАЗНЫЕ ВРАЩАЮЩИЕСЯ ПОЛЯ требуется два
пар катушек возбуждения, смещенных на 90º. Они должны быть запитаны напряжениями, которые также имеют фазовый сдвиг
90º.
4-16
ТРЕХФАЗНЫЕ ВРАЩАЮЩИЕСЯ ПОЛЯ требуют трех пар обмоток, отстоящих друг от друга на 120º, питаемых от
напряжения, которые также имеют 120-градусный фазовый сдвиг.
СИНХРОННЫЕ ДВИГАТЕЛИ специально разработаны для поддержания постоянной скорости с ротором
синхронно с вращающимся полем. Синхронные двигатели требуют модификации (например, обмотки с короткозамкнутым ротором).
самозапуск.
4-17
АИНХОННЫЕ ДВИГАТЕЛИ являются наиболее часто используемыми из всех электродвигателей из-за их
простота и дешевизна. Асинхронные двигатели могут быть однофазными или многофазными. Они не требуют электрического ротора
связь. Двухфазные двигатели со специальными пусковыми обмотками и двигатели с расщепленными полюсами являются типами однофазных двигателей.
асинхронные двигатели.
СИНХРОННАЯ СКОРОСТЬ — скорость вращения поля статора. Определяется количеством полюсов.
и частота входного напряжения. Таким образом, для данного двигателя синхронная скорость постоянна.
SLIP — это разница между фактической скоростью вращения ротора и синхронной скоростью в асинхронных двигателях.
Проскальзывание должно существовать, чтобы на валу ротора возникал крутящий момент.
Ответы на вопросы Q1. Через Q13.
А1. Серийный, синхронный, индукционный.
А2. Для питания мелкой бытовой техники.
А3. Они
работают как на переменном, так и на постоянном токе.
А4. Количество фаз приложенного напряжения.
А5. 90º.
А6. Количество и расположение полюсов поля.
А7. Для некоторых нагрузок требуется постоянная скорость.
А8. Они просты и недороги в изготовлении.
А9. Соскальзывать.
А10. Нагрузка.
А11.
Однофазный асинхронный двигатель.
А12. Используя комбинации индуктивности и емкости для подачи противофазных токов в пусковые обмотки.
Используя комбинации индуктивности и емкости для подачи противофазных токов в пусковые обмотки.
А13. У них очень слабые пусковые моменты.
4-18
| — | Материя, Энергия, и постоянного тока |
| — | Переменный ток и трансформаторы |
| — | Защита цепи, управление и измерение |
| — | Электрические проводники, электромонтажные работы, и схематическое чтение |
| — | Генераторы и двигатели |
| — | Электронное излучение, трубки и источники питания |
| — | Твердотельные устройства и блоки питания |
| — | Усилители |
| — | Схемы генерации и формирования волн |
| — | Распространение волн, линии передачи и Антенны |
| — | Принципы работы с микроволнами |
| — | Принципы модуляции |
| — | Введение в системы счисления и логические схемы |
| — | — Введение в микроэлектронику |
| — | Принципы синхронизаторов, сервоприводов и гироскопов |
| — | Знакомство с испытательным оборудованием |
| — | Принципы радиочастотной связи |
| — | Принципы радиолокации |
| — | Справочник техника, основной глоссарий |
| — | Методы испытаний и практика |
| — | Введение в цифровые компьютеры |
| — | Магнитная запись |
| — | Введение в волоконную оптику |
| Примечание: Обучение электротехнике и электронике военно-морского флота Контент серии (NEETS) является собственностью ВМС США и находится в открытом доступе.  | |
Основы асинхронного двигателя
You are here: Home / Новые статьи / Основы асинхронного двигателя
Автор: David Herres Оставить комментарий
Асинхронные двигатели считаются асинхронными. Это связано с тем, что, хотя их скорость зависит от внешней синусоиды, она не синхронизирована с ней точно.
В асинхронном двигателе источник питания переменного тока подключается непосредственно к катушкам возбуждения, которые являются частью статора. Переменная мощность создает вращающееся магнитное поле. Это поле индуцирует ток в роторе и соответствующее вращающееся магнитное поле посредством взаимной индукции. Таким образом, статор и ротор фактически являются первичной и вторичной обмотками трансформатора.
В двигателях постоянного тока и других синхронных двигателях одно магнитное поле статично, а другое вращается посредством внутренней или внешней коммутации. В асинхронном двигателе вращаются оба поля. Но взаимодействия, которое будет вращать вал двигателя, не будет, если оба поля будут вращаться с одинаковой скоростью. Движение одного магнитного поля по отношению к другому делает возможным выход механической энергии в двигателе. В асинхронном двигателе скорость вращения вращающегося магнитного поля (и, следовательно, ротора) немного меньше скорости вращения магнитного поля статора. Разница двух скоростей, выраженная в процентах, известна как «скольжение». Проскальзывание следует рассматривать не как некоторую потерю энергии, вызванную неэффективной работой или дефектом конструкции, а скорее как необходимое свойство асинхронного двигателя, без которого он был бы мертв в воде.
Но взаимодействия, которое будет вращать вал двигателя, не будет, если оба поля будут вращаться с одинаковой скоростью. Движение одного магнитного поля по отношению к другому делает возможным выход механической энергии в двигателе. В асинхронном двигателе скорость вращения вращающегося магнитного поля (и, следовательно, ротора) немного меньше скорости вращения магнитного поля статора. Разница двух скоростей, выраженная в процентах, известна как «скольжение». Проскальзывание следует рассматривать не как некоторую потерю энергии, вызванную неэффективной работой или дефектом конструкции, а скорее как необходимое свойство асинхронного двигателя, без которого он был бы мертв в воде.
Когда скольжение равно нулю, выходной крутящий момент асинхронного двигателя равен нулю. Крутящий момент прямо пропорционален проскальзыванию при низких значениях проскальзывания (обычно менее 10%). Прошло точку макс. крутящий момент, выходной крутящий момент становится обратно пропорциональным скольжению.
Обмотки в роторе асинхронного двигателя имеют низкое сопротивление. Небольшое скольжение вызывает высокие ток и крутящий момент ротора. Когда двигатель начинает вращаться, скольжение составляет 100 %, а ток двигателя максимален. Скольжение и ток двигателя падают, когда ротор начинает вращаться. Небольшой асинхронный двигатель может иметь скольжение более 5% при полной нагрузке, в то время как в более крупных асинхронных двигателях скольжение при полной нагрузке может быть менее 1%.
Небольшое скольжение вызывает высокие ток и крутящий момент ротора. Когда двигатель начинает вращаться, скольжение составляет 100 %, а ток двигателя максимален. Скольжение и ток двигателя падают, когда ротор начинает вращаться. Небольшой асинхронный двигатель может иметь скольжение более 5% при полной нагрузке, в то время как в более крупных асинхронных двигателях скольжение при полной нагрузке может быть менее 1%.
Поскольку в асинхронном двигателе нет щеток или движущихся частей, кроме ротора, поддерживаемого обычно герметичными подшипниками, асинхронный двигатель надежен и не требует технического обслуживания. Многофазные асинхронные двигатели различных размеров и конструкций питают промышленные установки по всему миру. В домашних условиях асинхронные двигатели приводят в действие вентиляторы, бытовую технику и более крупные инструменты, такие как настольные пилы, где универсальные двигатели не используются.
Никола Тесла и Галилео Феррарис, кажется, независимо друг от друга изобрели и построили работающие модели асинхронного двигателя в 1880-х годах.