Содержание
Принцип работы синхронного двигателя — услуги электромонтажа, строительства и ремонта
Для двигателей с постоянными магнитами используются специальные двигатели с внешним ускорением. В отличие от асинхронных устройств, ускорение ротора в синхронном двигателе должно достигать скорости магнитного поля. При этом ток подается в обмотку ротора от внешнего источника, а не индуцируется магнитным полем статора, поэтому он не зависит от скорости вращения вала. Следовательно, синхронный двигатель переменного тока достигает постоянной скорости вращения ротора независимо от нагрузки. Специфический принцип работы этих устройств повлиял на их пуск и регулирование скорости.
Синхронный двигатель состоит из основных частей – якоря и индукционной катушки. Обычно он сконструирован таким образом, что якорь расположен на статоре, а индуктор – на роторе, разделенные воздушным зазором. Эти устройства характеризуются высоким коэффициентом мощности. Важным преимуществом является то, что их можно использовать при любом напряжении.
Синхронный двигатель состоит из двух основных частей – статора и ротора. Статор – это неподвижная часть устройства, а ротор – подвижная часть. Якорь состоит из одной или нескольких обмоток переменного тока. Когда двигатель работает, токи, протекающие в якоре, заставляют магнитное поле вращаться, пересекаясь с полем индуктора и преобразуя энергию. Поле якоря иначе называется полем реакции якоря. В генераторе переменного тока это поле создается катушкой индуктивности.
Индуктор состоит из электромагнита постоянного тока, называемого полюсами. Во всех синхронных двигателях индукторы бывают двух видов: с прямым полюсом и без прямого полюса, которые имеют различное расположение полюсов. Конструкция статора состоит из корпуса и сердечника с двухфазными и трехфазными обмотками. Сами обмотки могут быть распределенными и концентрированными.
Для уменьшения магнитного сопротивления и увеличения магнитного потока в роторе и статоре используются ферромагнитные сердечники, которые изготавливаются из электротехнической стали. Он обладает интересными свойствами, например, повышенным содержанием кремния, что увеличивает его электрическое сопротивление и уменьшает вихревые токи.
Он обладает интересными свойствами, например, повышенным содержанием кремния, что увеличивает его электрическое сопротивление и уменьшает вихревые токи.
Каждый синхронный электродвигатель имеет важный параметр – электромагнитный момент. Это происходит, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Это поле создается трехфазным током, протекающим через обмотку якоря.
В режиме холостого хода оси магнитных полей ротора и статора совпадают. Следовательно, электромагнитные силы между их полюсами принимают радиальное направление, и значение электромагнитного момента узла становится равным нулю. Когда устройство переходит в режим работы двигателя, момент внешней нагрузки, приложенный к валу, начинает действовать на ротор. В результате ротор смещается на определенный угол относительно направления вращения.
Это электромагнитное взаимодействие между ротором и статором создает электромагнитные силы в направлении вращения. Таким образом, действие вращающегося электромагнитного момента стремится преодолеть действие внешнего вращающего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, когда полюса ротора выровнены между осями полюсов статора.
Максимальное значение электромагнитного момента образует угол 90 градусов, когда полюса ротора выровнены между осями полюсов статора.
Если момент нагрузки, приложенный к валу двигателя, превышает максимальный электромагнитный момент, двигатель будет остановлен внешним моментом. Это приводит к тому, что через обмотку якоря протекает очень большой ток, когда двигатель неподвижен. Это состояние является сигналом тревоги, это отсутствие синхронизации и не должно допускаться на практике.
В любом случае, необходимо стабилизировать выходное напряжение генераторной установки. Для этого достаточно питать обмотку ротора от источника, напряжение которого постоянно и не изменяется при колебаниях скорости.
Содержание
Конструкция синхронного двигателя
Его конструкция практически идентична конструкции 3-фазного асинхронного двигателя, за исключением того, что на ротор подается источник постоянного тока.
На рисунке показана конструкция двигателя этого типа. На статор подается 3-фазное напряжение, а на ротор – источник постоянного тока.
Конструкция синхронного двигателя
Основные характеристики синхронных двигателей:
- Синхронные двигатели не являются самозапускающимися механизмами. Они требуют определенного внешнего воздействия для получения определенной синхронной скорости.
- Двигатель работает синхронно с частотой питающей сети. Поэтому при непрерывном питании частотой он ведет себя как двигатель с постоянной скоростью.
- Этот двигатель обладает уникальной характеристикой, работая при любом коэффициенте мощности. Именно поэтому они используются для увеличения коэффициента мощности.
Фильм: Конструкция и принцип работы синхронного двигателя
Характеристика двигателя такова, что скорость вращения ротора и скорость магнитного потока равны. Поэтому скорость вращения вала двигателя независима и не зависит от величины подключенной нагрузки. Это возможно потому, что индукционная катушка синхронного двигателя представляет собой электромагнит, в некоторых случаях – постоянный магнит.
Конструктивные особенности и принцип работы
Основными компонентами синхронного электродвигателя являются статор, который неподвижен, и ротор, иначе называемый возбудителем. Статор также называют якорем, но это не меняет его сути. Эти части двигателя отделены друг от друга слоем воздуха. Между промежутками находится трехфазная обмотка, которая обычно соединена в звезду.
Когда двигатель запускается, токи якоря создают движущееся магнитное поле, а вращение поля создает перекрывающееся поле индуктора. Результатом работы этих двух полей является энергия. Магнитное поле статора по своей природе является его полем реакции. При работе генераторов эта энергия вырабатывается индукторами.
Полюса – это электромагниты постоянного тока статора. Статоры синхронных двигателей могут быть спроектированы по различным схемам: неявно-полюсной и явно-полюсной. Они отличаются расположением полюсов.
Для снижения магнитного сопротивления и оптимизации условий магнитного поля используются сердечники из ферромагнитного материала. Они расположены в роторе и якоре. Они изготавливаются из электротехнической стали, которая содержит высокую долю кремния. Это уменьшает вихревые токи и увеличивает электрическое сопротивление стали.
Они расположены в роторе и якоре. Они изготавливаются из электротехнической стали, которая содержит высокую долю кремния. Это уменьшает вихревые токи и увеличивает электрическое сопротивление стали.
Синхронные двигатели основаны на взаимном взаимодействии полюсов возбудителя и статора. При запуске двигатель разгоняется до скорости магнитного потока. Только при этом условии двигатель запускается в синхронном режиме. Во время этого процесса магнитные поля образуют спайку, и происходит вход синхронизации.
Долгое время для разгона двигателя использовался отдельный стартерный двигатель. Он был механически соединен с синхронным двигателем. Во время запуска ротор двигателя ускоряется и достигает синхронной скорости. Затем двигатель самостоятельно переключился на синхронное движение. При выборе мощности пускового двигателя в качестве ориентира использовалось 15% от номинальной мощности разгоняемого двигателя. Этого запаса мощности было достаточно для запуска синхронного двигателя даже при низкой нагрузке.
Этот метод ускорения более сложен и значительно увеличивает стоимость оборудования. В современных конструкциях синхронные двигатели не имеют такой схемы ускорения. Используется другая схема ускорения. Реостат используется для короткого замыкания обмоток индукционной катушки так же, как и для асинхронного двигателя. Для запуска на ротор устанавливается обмотка с сепаратором, которая также является неподвижной обмоткой для предотвращения раскачивания ротора во время синхронизации.
Когда ротор достигает номинальной скорости, постоянный ток подключается к возбудителю. Однако для запуска двигателей с постоянными магнитами требуются внешние пусковые двигатели.
В криогенных синхронных двигателях используется инвертированная конструкция. В этом случае якорь и возбудитель меняются местами, причем возбудитель находится на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения изготавливаются из сверхпроводящих материалов.
Преимущества и недостатки
Синхронные двигатели имеют преимущество перед асинхронными двигателями в том, что возбуждение постоянным током от внешнего источника дает возможность работать при значительном значении коэффициента мощности.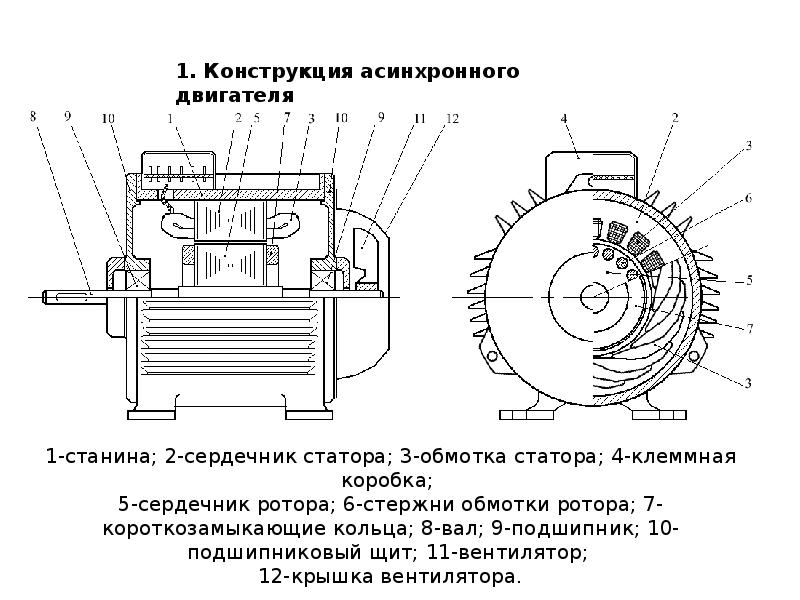 Эта функция позволяет увеличить значение коэффициента мощности для всей питающей сети за счет использования синхронного двигателя.
Эта функция позволяет увеличить значение коэффициента мощности для всей питающей сети за счет использования синхронного двигателя.
У синхронных двигателей есть и другие преимущества:
- Синхронные двигатели работают при более высоком коэффициенте мощности, что приводит к снижению потребления энергии и потерь. КПД синхронного двигателя выше при одинаковой мощности по сравнению с асинхронным двигателем.
- У синхронных двигателей вращающий момент напрямую зависит от напряжения сети. Поэтому при падении напряжения он сохраняет свою мощность в большей степени, чем асинхронные двигатели. Это является одним из факторов надежности таких конструкций двигателей.
Недостатки следующие:
- При сравнении конструкций этих двух двигателей видно, что синхронные двигатели спроектированы более сложным образом, поэтому их стоимость будет выше.
- Еще одним недостатком синхронных двигателей является необходимость в источнике тока в виде выпрямителя или другого источника постоянного тока.

- Двигатель запускается по сложной схеме.
- Скорость вращения вала двигателя можно регулировать только одним способом – с помощью преобразователя частоты.

Вывод заключается в том, что преимущества синхронных двигателей перевешивают недостатки. Поэтому двигатели этого типа широко используются в технологических процессах, где происходит непрерывный процесс и не требуется частая остановка и запуск оборудования: в мельничном производстве, компрессорах, дробилках, насосах и т.д.
Выбор двигателя
К покупке синхронного двигателя следует подходить с учетом следующих факторов:
- Условия эксплуатации электродвигателя. В зависимости от условий выбирается тип двигателя, который может быть защищенным, открытым или закрытым. Синхронные двигатели также различаются по степени защиты токоведущих частей от влаги, температуры, агрессивных сред. В случае взрывоопасного производства существуют специальные средства защиты, которые предотвращают образование искр в двигателе.
- Особенности соединения электродвигателя с потребителем.

Синхронные компенсаторы
Они используются для компенсации коэффициента мощности в сети и стабилизации номинального напряжения при подключении нагрузки к двигателю. Нормальным режимом работы синхронного компенсатора является перегрузка при подаче реактивной мощности в сеть.
Эти компенсаторы также называют генераторами реактивной мощности, поскольку они предназначены для выполнения той же задачи, что и конденсаторные батареи на подстанциях. В случае падения мощности нагрузки часто необходимо, чтобы синхронные компенсаторы работали в режиме без возбуждения, потребляя реактивную мощность и индуктивный ток, поскольку напряжение сети имеет тенденцию к повышению, и чтобы стабилизировать его на рабочем уровне, в сеть должен быть подан индуктивный ток, который понижает напряжение сети.
Для этого синхронные компенсаторы оснащаются автоматическим регулятором возбуждения. Регулятор изменяет ток возбуждения таким образом, чтобы напряжение на компенсаторе не изменялось.
Сфера применения
Широко распространенное использование асинхронных двигателей при значительных недогрузках ухудшает работу электростанций и систем, поскольку снижается коэффициент мощности системы, что приводит к незапланированным потерям и недоиспользованию активной мощности. Это привело к необходимости использования синхронных двигателей, особенно в приводах машин большой мощности.
Сравнивая синхронные двигатели с асинхронными, синхронные двигатели имеют преимущество в том, что они работают с коэффициентом мощности 1. Они не потребляют реактивную мощность из сети, а если они перегружены, то даже поставляют некоторую реактивную мощность в сеть.
В результате улучшается коэффициент мощности сети и снижаются потери напряжения, что увеличивает коэффициент мощности генераторов электростанции. Наибольший крутящий момент синхронного электродвигателя напрямую зависит от напряжения, а для синхронного электродвигателя – от квадрата напряжения.
Поэтому при пониженном напряжении синхронный электродвигатель сохраняет значительную нагрузочную способность. Кроме того, возможность увеличения тока возбуждения синхронных двигателей позволяет повысить их эксплуатационную надежность при резких перепадах напряжения и оптимизировать работу всей энергосистемы в таких случаях.
Кроме того, возможность увеличения тока возбуждения синхронных двигателей позволяет повысить их эксплуатационную надежность при резких перепадах напряжения и оптимизировать работу всей энергосистемы в таких случаях.
Благодаря большому воздушному зазору дополнительные потери в стальных сердечниках и роторе синхронных двигателей ниже, чем в асинхронных двигателях. Поэтому КПД синхронных двигателей зачастую выше.
Однако конструкция синхронных двигателей намного сложнее, и для их работы необходим возбудитель или другое силовое устройство возбуждения. Поэтому синхронные двигатели стоят дороже, чем асинхронные двигатели с короткозамкнутым ротором.
Пуск и регулирование скорости синхронных двигателей связаны с определенными трудностями. Однако при более высоких мощностях их преимущества перевешивают недостатки. Поэтому они используются во многих местах, где нет необходимости в частом запуске и остановке оборудования и регулировании скорости вращения двигателя с приводными механизмами насосов, компрессоров, мельниц и т. д.
д.
Зависимость скорости вращения ротора от напряжения питания используется для эффективного управления режимами работы синхронного двигателя.
МЕТОДЫ И УСТРОЙСТВА ПЛАВНОГО ПУСКА И УПРАВЛЕНИЯ
Мягкий пуск может быть достигнут за счет использования вспомогательного двигателя или асинхронного пуска.
Первый случай очевиден, а во втором используется принцип асинхронного вращения электромагнитных полей, вызывающий эффект проскальзывания в начальной фазе работы. Каждый из этих вариантов имеет свои преимущества и недостатки.
Зависимость скорости вращения ротора от напряжения питания используется для эффективного управления условиями работы синхронного двигателя.
Для заданного значения составляющей тока это управление сводится к изменению мощности на валу. Он может быть реализован различными способами, но наиболее эффективными считаются электронные устройства (преобразователи).
Для управления режимами используются современные полупроводниковые элементы. К последним относятся транзисторы, тиристоры и симисторы.
С помощью этих быстродействующих элементов можно изменять мощность в нагрузке, используя принципы широтно-импульсного или фазово-импульсного управления.
© 2014-2021 Все права защищены.
Материал на этой странице представлен исключительно в информационных целях, является мнением автора и не должен использоваться в качестве руководства или нормативного документа.
Дело в том, что этот материал содержит большое количество кремния, который значительно снижает вихревые токи и улучшает электрическое сопротивление сердечника.
Синхронные двигатели. Эксплуатация и применение. Особенности .
Характерной особенностью работы двигателя является равенство скорости вращения ротора и скорости магнитного потока. Поэтому скорость вращения вала двигателя не зависит и не изменяется от величины подключенной нагрузки. Это возможно потому, что индукционная катушка синхронного двигателя представляет собой электромагнит, в некоторых случаях – постоянный магнит.
Число пар полюсов ротора совпадает с числом пар полюсов движущегося магнитного поля. Взаимодействие этих полюсов позволяет выравнивать скорость вращения ротора. В этот момент вал можно подвергать любой нагрузке. Это не влияет на скорость вращения индуктора.
Взаимодействие этих полюсов позволяет выравнивать скорость вращения ротора. В этот момент вал можно подвергать любой нагрузке. Это не влияет на скорость вращения индуктора.
Конструкция и принцип работы
Основными частями синхронного двигателя являются статор, который неподвижен, и ротор, иначе называемый индуктором. Статор также называют якорем, но это не меняет его сути. Эти части двигателя отделены друг от друга слоем воздуха. Между промежутками находится трехфазная обмотка, обычно соединенная в соединение звездой.
Когда двигатель начинает работать, токи якоря создают движущееся магнитное поле, а его вращение приводит к перекрытию поля индуктора. Результатом работы этих двух полей является энергия. Магнитное поле статора по своей природе является его полем реакции. При работе генераторов эта энергия вырабатывается индукторами.
Полюса – это электромагниты постоянного тока статора. Статоры синхронных двигателей могут быть спроектированы по различным схемам: неявно-полюсной и явно-полюсной. Они отличаются расположением полюсов.
Они отличаются расположением полюсов.
Для снижения магнитного сопротивления и оптимизации условий магнитного поля используются сердечники из ферромагнитного материала. Они расположены в роторе и якоре. Они изготавливаются из электротехнической стали, которая содержит высокую долю кремния. Это уменьшает вихревые токи и увеличивает электрическое сопротивление стали.
Синхронные двигатели основаны на взаимном взаимодействии полюсов возбудителя и статора. При запуске двигатель разгоняется до скорости магнитного потока. Только при этом условии двигатель запускается в синхронном режиме. Во время этого процесса магнитные поля образуют спайку, и происходит вход синхронизации.
Долгое время для разгона двигателя использовался отдельный стартерный двигатель. Он был механически соединен с синхронным двигателем. Во время запуска ротор двигателя ускоряется и достигает синхронной скорости.
Затем двигатель самостоятельно переключился на синхронное движение. При выборе мощности пускового двигателя в качестве ориентира использовалось 15% от номинальной мощности разгоняемого двигателя.
Этого запаса мощности было достаточно для запуска синхронного двигателя даже при низкой нагрузке.
Этот метод ускорения более сложен и значительно увеличивает стоимость оборудования. В современных конструкциях синхронные двигатели не имеют такой схемы ускорения. Используется другая схема ускорения.
Реостат используется для короткого замыкания обмоток индукционной катушки так же, как и для асинхронного двигателя.
Для запуска на ротор устанавливается обмотка с сепаратором, которая также является неподвижной обмоткой для предотвращения раскачивания ротора во время синхронизации.
Когда ротор достигает номинальной скорости, постоянный ток подключается к возбудителю. Однако для запуска двигателей с постоянными магнитами требуются внешние пусковые двигатели.
В криогенных синхронных двигателях используется инвертированная конструкция. В этом случае якорь и возбудитель меняются местами, причем возбудитель находится на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения изготавливаются из сверхпроводящих материалов.
Преимущества и недостатки
Синхронные двигатели имеют преимущество перед асинхронными двигателями в том, что возбуждение постоянным током от внешнего источника дает возможность работать при значительном значении коэффициента мощности. Эта функция позволяет увеличить значение коэффициента мощности для всей питающей сети за счет использования синхронного двигателя.
У синхронных двигателей есть и другие преимущества:
- Синхронные двигатели работают при более высоком коэффициенте мощности, что приводит к снижению потребления энергии и потерь. КПД синхронного двигателя выше при одинаковой мощности по сравнению с асинхронным двигателем.
- У синхронных двигателей вращающий момент напрямую зависит от напряжения сети. Поэтому при падении напряжения он сохраняет свою мощность в большей степени, чем асинхронные двигатели. Это является одним из факторов надежности таких конструкций двигателей.
Недостатки следующие:
- При сравнении конструкций этих двух двигателей видно, что синхронные двигатели спроектированы более сложным образом, поэтому их стоимость будет выше.
- Еще одним недостатком синхронных двигателей является необходимость в источнике тока в виде выпрямителя или другого источника постоянного тока.
- Двигатель запускается по сложной схеме.
- Скорость вращения вала двигателя можно регулировать только одним способом – с помощью преобразователя частоты.

Вывод заключается в том, что преимущества синхронных двигателей перевешивают недостатки.
Поэтому двигатели этого типа широко используются в технологических процессах, где происходит непрерывный процесс и не требуется частая остановка и запуск оборудования: в мельничном производстве, компрессорах, дробилках, насосах и т.д.
Выбор двигателя
К покупке синхронного двигателя следует подходить с учетом следующих факторов:
- Условия эксплуатации электродвигателя. В зависимости от условий выбирается тип двигателя, который может быть защищенным, открытым или закрытым. Синхронные двигатели также различаются по степени защиты токоведущих частей от влаги, температуры, агрессивных сред. В случае взрывоопасного производства существуют специальные средства защиты, которые предотвращают образование искр в двигателе.
- Особенности соединения электродвигателя с потребителем.
 В случае взрывоопасного производства существуют специальные средства защиты, которые предотвращают образование искр в двигателе.
В случае взрывоопасного производства существуют специальные средства защиты, которые предотвращают образование искр в двигателе.Синхронные компенсаторы
Они используются для компенсации коэффициента мощности в сети и стабилизации номинального напряжения при подключении нагрузки к двигателю. Нормальным режимом работы синхронного компенсатора является перегрузка, когда реактивная мощность реактивная мощность.
Эти компенсаторы также называют генераторами реактивной мощности, поскольку они предназначены для выполнения той же задачи, что и конденсаторные батареи на подстанциях.
В случае падения мощности нагрузки синхронным компенсаторам часто приходится работать в режиме без возбуждения с потреблением реактивной мощности и индуктивного тока, поскольку напряжение сети имеет тенденцию к повышению, и для его стабилизации на рабочем уровне необходимо зарядить сеть индуктивным током, что вызывает падение напряжения сети.
Для этого синхронные компенсаторы оснащаются автоматическим регулятором возбуждения. Регулятор изменяет ток возбуждения таким образом, чтобы напряжение на компенсаторе не изменялось.
Сфера применения
Широко распространенное использование асинхронных двигателей при значительных недогрузках ухудшает работу электростанций и систем, поскольку снижается коэффициент мощности системы, что приводит к незапланированным потерям и недоиспользованию активной мощности. Это привело к необходимости использования синхронных двигателей, особенно в приводах машин большой мощности.
Сравнивая синхронные двигатели с асинхронными, синхронные двигатели имеют преимущество в том, что они работают с коэффициентом мощности 1. Они не потребляют реактивную мощность из сети, а если они перегружены, то даже поставляют некоторую реактивную мощность в сеть.
В результате улучшается коэффициент мощности сети и снижаются потери напряжения, что увеличивает коэффициент мощности генераторов электростанции. Наибольший крутящий момент синхронного электродвигателя напрямую зависит от напряжения, а для синхронного электродвигателя – от квадрата напряжения.
Наибольший крутящий момент синхронного электродвигателя напрямую зависит от напряжения, а для синхронного электродвигателя – от квадрата напряжения.
Поэтому при пониженном напряжении синхронный электродвигатель сохраняет значительную нагрузочную способность. Кроме того, возможность увеличения тока возбуждения синхронных двигателей позволяет повысить их эксплуатационную надежность при резких перепадах напряжения и оптимизировать работу всей энергосистемы в таких случаях.
Благодаря большому воздушному зазору дополнительные потери в стальных сердечниках и роторе синхронных двигателей ниже, чем в асинхронных двигателях. Поэтому КПД синхронных двигателей зачастую выше.
Однако конструкция синхронных двигателей намного сложнее, и для их работы необходим возбудитель или другое силовое устройство возбуждения. Поэтому синхронные двигатели стоят дороже, чем асинхронные двигатели с короткозамкнутым ротором.
Пуск и регулирование скорости синхронных двигателей связаны с определенными трудностями. Однако при больших мощностях их преимущества перевешивают недостатки. Поэтому их используют во многих местах, где нет необходимости в частом запуске, остановке оборудования, а также нет необходимости регулировать скорость вращения двигателя с приводными механизмами насосов, компрессоров, мельниц и т.д.
Однако при больших мощностях их преимущества перевешивают недостатки. Поэтому их используют во многих местах, где нет необходимости в частом запуске, остановке оборудования, а также нет необходимости регулировать скорость вращения двигателя с приводными механизмами насосов, компрессоров, мельниц и т.д.
Похожие темы:
Бесщеточный синхронный двигатель с постоянными магнитами – Намерение] Бесщеточные синхронные двигатели с постоянными магнитами (PMSM) имеют несколько названий: бесщеточный двигатель постоянного тока, бесщеточный двигатель PMAC и двигатель с электронным управлением (ECM) ….. … Руководство технического переводчика
синхронный двигатель
СИНХРОННЫЙ ДВИГАТЕЛЬ – Синхронная машина, работающая в режиме двигателя. Используется в приводах двигателей, не требующих регулирования скорости вращения двигателя (например, насосы)….. Большой энциклопедический словарь
синхронный двигатель – Синхронные электрические машины, работающие в режиме двигателя.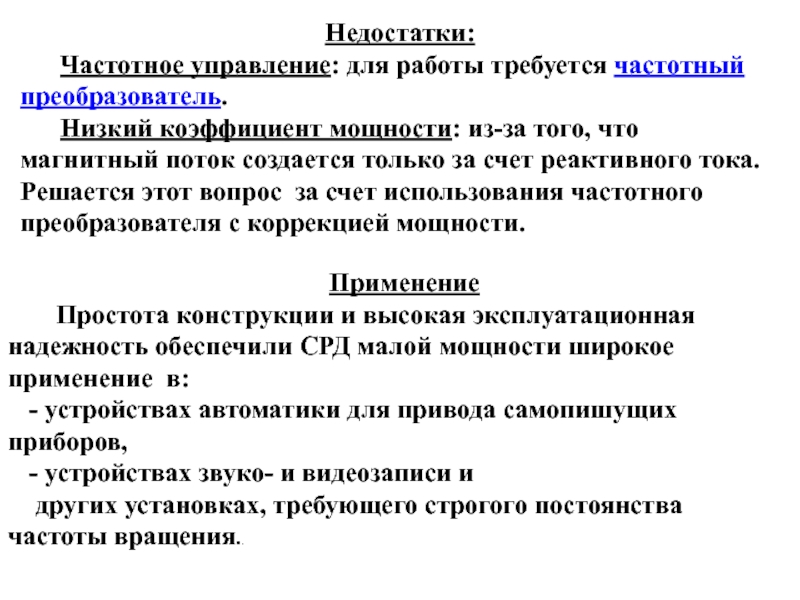 Он используется в электроприводах, не требующих регулирования скорости вращения вала двигателя (например, в насосах). * * * * * * * Синхронный электродвигатель Синхронный электродвигатель,…
Он используется в электроприводах, не требующих регулирования скорости вращения вала двигателя (например, в насосах). * * * * * * * Синхронный электродвигатель Синхронный электродвигатель,…
СИНХРОННЫЙ ДВИГАТЕЛЬ – Синхронная электрическая машина, работающая в режиме двигателя. По сравнению с асинхронным двигателем, он имеет более высокий коэффициент мощности и перегрузочную способность. Однако из-за необходимости возбуждения постоянным током от возбудителя или ……
Бесщеточный синхронный двигатель с постоянными магнитами – Намерение] Бесщеточные синхронные двигатели с постоянными магнитами (PMSM) имеют несколько названий: бесщеточный двигатель постоянного тока, бесщеточный двигатель PMAC и двигатель с электронным управлением (ECM) ….. … Руководство технического переводчика
Двигатель переменного тока – Электродвигатели различной мощности (750 Вт, 25 Вт, для CD-плеера, для игрушки, для дисковода) Электродвигатель – это электрическая машина, в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла…. . … Википедия
. … Википедия
Синхронный – ae, oe; o/nen, o/n 1) книга. Совпадающий по времени, происходящий одновременно с чем-л. Синхронные движения танцующей пары. Синхронный перевод. Синонимы: одновременный 2) Основанный на применении принципа синхронности,… Популярный словарь русского языка
SYNCHRONIC – [ Словарь иностранных языков
синхронный компенсатор – Синхронный электродвигатель, работающий без активной нагрузки, предназначенный для улучшения коэффициента мощности (cosφ) и регулирования напряжения в линиях и сетях электропередачи (см. Компенсационные устройства). W… Большая советская энциклопедия
Гистерезисный электродвигатель – Синхронный электродвигатель, в котором крутящий момент создается за счет гистерезисного намагничивания массивного ротора с сердечником из магнитного материала, имеющего широкую петлю гистерезиса. Для мощности до 100 Вт и частоты до 400 … Большая советская энциклопедия
Читайте далее:
- Шаговые двигатели: свойства и практические схемы управления. Часть 2.
- Синхронные компенсаторы в электрических сетях; School of Electrical Engineers: Electrical and Electronic Engineering.
- Рабочие характеристики асинхронного двигателя; Школа для электриков: электротехника и электроника.
- Векторное и скалярное управление преобразователями частоты – принцип работы, система управления.
- Асинхронный электродвигатель – конструкция, принцип работы, типы асинхронных двигателей.
- Что такое якорь в электродвигателе – Станция техобслуживания ЭкоПаркинг.
- Векторное управление вентильным двигателем в безредукторном сервоприводе – темы научных работ по электротехнике, электронике, информатике читайте бесплатно тексты научных работ в электронной библиотеке КиберЛенинка.
 Часть 2.
Часть 2.какой лучше? — Электродвигатели Электромомент
Краткий экскурс в историю.
«Противостояние» синхронных и асинхронных электродвигателей началось ещё в середине XX века. В то время во главе «команды синхронных», выступал так называемый электродвигатель постоянного тока, он же «коллекторный», он же простейший «член семьи» синхронных электрических машин. Почему «простейший»? Из-за того, что у него, в отличие от современного синхронного электродвигателя, встроена примитивная система управления — коллектор. Эта важная деталь помогла достичь главного: создать простую и дешевую синхронную машину, которую можно питать непосредственно от источника постоянного тока. Однако, недостатков у коллекторных электродвигателей оказалось гораздо больше, чем преимуществ: ограниченный ресурс работы и низкая надёжность, а также конструктивное ограничение количества полюсов не позволяло наращивать крутящий момент.
Почему «простейший»? Из-за того, что у него, в отличие от современного синхронного электродвигателя, встроена примитивная система управления — коллектор. Эта важная деталь помогла достичь главного: создать простую и дешевую синхронную машину, которую можно питать непосредственно от источника постоянного тока. Однако, недостатков у коллекторных электродвигателей оказалось гораздо больше, чем преимуществ: ограниченный ресурс работы и низкая надёжность, а также конструктивное ограничение количества полюсов не позволяло наращивать крутящий момент.
Именно на волне борьбы с проблемным коллектором в 80-90х годах прошлого века и стали набирать популярность бесколлекторные асинхронные электродвигатели. Несмотря на то, что технологически «асинхронник» оказалось сделать сложнее, а КПД и крутящий момент существенно уступают аналогичным синхронным электродвигателям, «асинхронники» начали быстро вытеснять коллекторные электромоторы. У бесколлекторных синхронных электродвигателей тогда ещё не было шансов, так как для их изготовления и качественного управления ещё не существовало доступной технологической и элементной базы.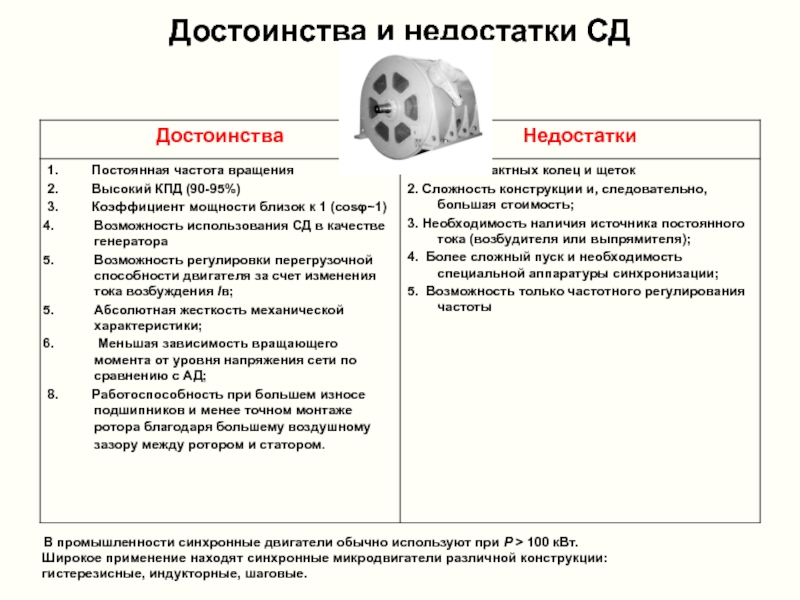 Из-за этого до сих пор у некоторых специалистов и представителей старшего поколения сохранилось устойчивое предубеждение, что синхронные электродвигатели — это очень дорого и сложно. До тех пор, пока не были созданы доступные цифровые системы и новые алгоритмы управления, одним из основных недостатков синхронных электродвигателей считалось отсутствие возможности управлять их оборотами.
Из-за этого до сих пор у некоторых специалистов и представителей старшего поколения сохранилось устойчивое предубеждение, что синхронные электродвигатели — это очень дорого и сложно. До тех пор, пока не были созданы доступные цифровые системы и новые алгоритмы управления, одним из основных недостатков синхронных электродвигателей считалось отсутствие возможности управлять их оборотами.
Сегодняшний день.
Синхронные электродвигатели серии EM-I с КПД, достигающим 97 — 98,5%.
За последние 5-10 лет перспективы для синхронных электрических машин кардинально улучшились и расширились! При начавшимся переходе к 6-му Технологическому Укладу становятся всё более доступными и массовыми новые производственные технологии, такие как: металлопласты и теплопроводные композиты, порошковая металлургия и 3D-печать и т.п. Во много раз подешевели и улучшили свои характеристики силовые полупроводники, специализированные микроконтроллеры и прочая электронная элементная база. Разработаны новые оригинальные решения, позволяющие в несколько раз увеличить удельные силовые характеристики электрических машин. Благодаря бурному развитию современных частотных преобразователей с цифровыми системами управления, синхронными электродвигателями стало легко управлять. Точная управляемость всеми силовыми характеристиками синхронных приводов во всём рабочем диапазоне оборотов и высокая экономичность, как при разгоне, так и на холостом ходу, стали дополнительными важными преимуществами относительно «асинхронников». Из-за своих конструктивных особенностей асинхронные электродвигатели неэффективны на холостом ходу и малых оборотах, непрерывно расходуя энергию на возбуждение ротора и требуя сверх-токов для разгона, которые превышают номинальные значения в 4-5 раз! Для сравнения, синхронные электродвигатели развивают номинальный крутящий момент во всём рабочем диапазоне оборотов при номинальном токе. Меньший рабочий ток позволяет, в частности, использовать аккумуляторы с большей удельной ёмкостью.
Разработаны новые оригинальные решения, позволяющие в несколько раз увеличить удельные силовые характеристики электрических машин. Благодаря бурному развитию современных частотных преобразователей с цифровыми системами управления, синхронными электродвигателями стало легко управлять. Точная управляемость всеми силовыми характеристиками синхронных приводов во всём рабочем диапазоне оборотов и высокая экономичность, как при разгоне, так и на холостом ходу, стали дополнительными важными преимуществами относительно «асинхронников». Из-за своих конструктивных особенностей асинхронные электродвигатели неэффективны на холостом ходу и малых оборотах, непрерывно расходуя энергию на возбуждение ротора и требуя сверх-токов для разгона, которые превышают номинальные значения в 4-5 раз! Для сравнения, синхронные электродвигатели развивают номинальный крутящий момент во всём рабочем диапазоне оборотов при номинальном токе. Меньший рабочий ток позволяет, в частности, использовать аккумуляторы с большей удельной ёмкостью.
Более высокие КПД и крутящий момент при относительно малых рабочих токах и хорошей управляемости позволяют синхронным электродвигателям успешно вытеснять асинхронные во всех типах электротранспорта: наземном, воздушном и водном. Из таких передовых отраслей, как робототехника, мехатроника и авиастроение асинхронные электродвигатели уже вытеснены синхронными практически полностью.
Примером реализации огромного потенциала бесколлекторных синхронных электроприводов является новое поколение современных синхронных машин серий AW, EM и iEM. Данные синхронные электрические машины показывают впечатляющие удельные силовые характеристики, которые в 5-10 раз превосходят традиционные «асинхронники», позволяя переходить от распространённых систем «асинхронный мотор с редуктором» на прямой (безредукторный) электропривод.
Классический асинхронный электродвигатель
Высоко-моментные синхронные электродвигатели серий EM и iEM
За последние пол-века конструкция и технология производства асинхронных электродвигателей была настолько хорошо отработана и оптимизирована, что какие-либо дальнейшие усовершенствования или улучшения их электрических параметров, даже с использованием современных программно-вычислительных средств, уже не позволяют рассчитывать на ощутимое сокращение столь большого отставания от современных синхронных электродвигателей по удельным силовым характеристикам. Максимум, что сейчас обеспечивают такие усовершенствования «асинхронников» — это улучшение параметров всего на 20-30%. Для соответствия таким важным требованиям 6-го Технологического Уклада, как минимизация материалоёмкости, высокая экономичность и точная управляемость этого улучшения недостаточно, особенно на фоне высоких характеристик, которые демонстрируют современные синхронные электрические машины.
Максимум, что сейчас обеспечивают такие усовершенствования «асинхронников» — это улучшение параметров всего на 20-30%. Для соответствия таким важным требованиям 6-го Технологического Уклада, как минимизация материалоёмкости, высокая экономичность и точная управляемость этого улучшения недостаточно, особенно на фоне высоких характеристик, которые демонстрируют современные синхронные электрические машины.
Основное преимущество, которое пока ещё сохраняют асинхронные электродвигатели, благодаря созданным производственным мощностям в странах Азии и высокой конкуренции — это низкая цена. Однако, при достижении сопоставимых с асинхронными двигателями объёмов серийного производства, себестоимость синхронных электрических машин серий AW, EM и iEM неизбежно станет ниже аналогичных по мощности «асинхронников», потому что:
1) синхронные электрические машины серий AW, EM и iEM имеют в несколько раз (!) меньшие масса-габариты по сравнению с «асинхронниками» аналогичной мощности или крутящего момента, что означает пропорционально меньшую материалоёмкость серий AW, EM и iEM.
При этом, вопреки распространённым мифам, стоимость постоянных неодимовых магнитов на практике не превышает 30% от стоимости остальных материалов и комплектующих данных синхронных электрических машин, включая используемые современные композиты.
Указывая на постоянные магниты, как основной недостаток при производстве роторов современных высокомоментных электродвигателей, защитники асинхронных электродвигателей умалчивают про высокую трудоёмкость и сложность серийного производства статоров для асинхронных двигателей. Даже крупные специализированные предприятия, как правило, осуществляют серийную намотку и сборку статоров асинхронных электродвигателей только вручную, что ощутимо сказывается на их себестоимости!
2) В отличие от классических асинхронных и синхронных электрических машин, модели серий AW, EM и iEM обладают высокой технологичностью серийной сборки! Это достигается не только широким применением современных композитных материалов в конструкции статора и ротора, но и возможностью обеспечения полной автоматизации серийного производства с относительно небольшими капитальными вложениями в оборудование. Это позволяет не только снизить себестоимость, но и увеличить надёжность выпускаемой продукции.
Это позволяет не только снизить себестоимость, но и увеличить надёжность выпускаемой продукции.
* Этап ручной сборки статора асинхронного двигателя на профильном производстве.
Композитный статор CCSC-3 для серий AW и EM, собранный с использованием оборудования автоматической намотки бескаркасных катушек
Таким образом, по сравнению с асинхронными, электродвигатели серий EM и iEM имеют относительно более высокую стоимость композитного ротора из-за постоянных магнитов, но, при этом, обеспечивают более низкую себестоимость композитных статоров, благодаря высокой технологичности и автоматизации серийной сборки.
При столь очевидных преимуществах современных синхронных приводов любые попытки сдерживать их развитие страшилками про «размагничивающиеся магниты», «дороговизну», «труднодоступность» и т.п., вряд ли помогут адептам «асинхронников» удержать свои позиции на рынке современных сложных систем, особенно в условиях назревшей необходимости перевода целого ряда ключевых отраслей РФ с преобладающих технологических уровней 3-4-го Технологических Укладов сразу к 6-му Технологическому Укладу, минуя 5-й.
Исторические аналогии.
Если проводить исторические аналогии, то недавно начавшийся переход от асинхронных к синхронным электродвигателям можно сравнить по значимости с появлением застёжки «молния» в первой половине XX века или с переходом от аналоговых к цифровым устройствам в 80-х годах прошлого столетия.
Массовое использование этих прорывных технологий стало возможно только при смене технологических укладов, несмотря на то, что соответствующие изобретения появились ещё за несколько десятилетий до их успешного внедрения.
Застёжка «молния» была запатентована в 1891 году, в начале 3-го Технологического Уклада («Эпоха стали»). После десятилетий гонений и множества неудачных попыток внедрения, серийное производство «молнии» и вытеснение шнуровки из многих отраслей стало возможно именно в разгар 4-го Технологического Уклада («Эпоха нефти»), начиная с 1923 года, когда достигнутый уровень промышленного производства позволил освоить новые производственные технологии.
Класс синхронных безредукторных электроприводов «Torque Motors» начал развиваться на Западе совсем недавно, примерно с 2012 года, что как раз совпадает с началом перехода к 6-му Технологическому Укладу. Неизменно только одно: новые изобретения и технологии, как обычно, подвергаются ожесточённому противодействию со стороны тех игроков рынка, кто уже построил свой бизнес с использованием устаревших или уходящих технологий.
Ассоциация «аналог-цифра» возникла у нас в процессе компьютерного моделирования электрических машин EM и iEM, когда мы сравнили математические модели, описывающие синхронные и асинхронные электрические машины. Оказалось, что, в отличие от асинхронного двигателя, для описания синхронной электрической машины существует точная математическая модель. В то время, как для описания «асинхронников» приходится использовать только приблизительные, аппроксимированные модели. Отсюда и ассоциация с «аналогом» и «цифрой», двумя совершенно разными подходами, потребительскими свойствами и перспективами применения.
*В данной статье использовано изображение с ресурса
Синхронные и асинхронные двигатели: руководство по сравнению
Учитесь на знаниях сообщества. Эксперты добавляют свои идеи в эту совместную статью на основе ИИ, и вы тоже можете.
Это новый тип статьи, которую мы начали с помощью ИИ, и эксперты продвигают ее вперед, делясь своими мыслями непосредственно в каждом разделе.
Если вы хотите внести свой вклад, запросите приглашение, поставив лайк или ответив на эту статью.
Узнать больше
— Команда LinkedIn
Последнее обновление:
27 апреля 2023 г.
Синхронные и асинхронные двигатели — это два распространенных типа двигателей переменного тока, используемых в электрических системах управления. Они различаются тем, как они генерируют крутящий момент и как они работают на разных скоростях и нагрузках. В этой статье вы узнаете о преимуществах и недостатках каждого типа двигателя и о том, как выбрать лучший для вашего применения.
Они различаются тем, как они генерируют крутящий момент и как они работают на разных скоростях и нагрузках. В этой статье вы узнаете о преимуществах и недостатках каждого типа двигателя и о том, как выбрать лучший для вашего применения.
Синхронные двигатели
Синхронные двигатели представляют собой двигатели переменного тока, которые вращаются с постоянной скоростью, пропорциональной частоте напряжения питания. У них есть ротор с постоянными магнитами или электромагнитами, которые выравниваются с вращающимся магнитным полем статора. Синхронные двигатели имеют высокий КПД, коэффициент мощности и крутящий момент. Их также можно использовать в качестве генераторов или для коррекции коэффициента мощности. Однако синхронные двигатели имеют некоторые недостатки, такие как высокая стоимость, сложность и обслуживание. Им также требуется отдельное пусковое устройство, такое как частотно-регулируемый привод или токосъемное кольцо, для преодоления высокого пускового момента и тока.
Асинхронные двигатели
Асинхронные двигатели — это двигатели переменного тока, в которых для создания крутящего момента используется электромагнитная индукция. У них есть ротор с токопроводящими стержнями или обмотками, которые закорочены концевыми кольцами. Вращающееся магнитное поле статора индуцирует ток в роторе, который, в свою очередь, создает магнитное поле, противодействующее полю статора. Асинхронные двигатели отличаются низкой стоимостью, простотой и долговечностью. Они могут стартовать прямо с линии и могут работать с переменными скоростями и нагрузками. Однако асинхронные двигатели имеют некоторые недостатки, такие как низкий КПД, коэффициент мощности и крутящий момент. Они также производят больше тепла, шума и скольжения, чем синхронные двигатели.
Выбор двигателя
Выбор между синхронными и асинхронными двигателями зависит от нескольких факторов, таких как требуемая скорость, крутящий момент, мощность, нагрузка и область применения. Как правило, синхронные двигатели больше подходят для приложений, требующих постоянной скорости, высокой мощности или точного управления, таких как насосы, компрессоры или конвейеры. Асинхронные двигатели больше подходят для приложений, требующих переменной скорости, низкой мощности или простого управления, таких как вентиляторы, воздуходувки или смесители. Вы также должны учитывать доступность, стоимость и техническое обслуживание двигателя и его компонентов.
Как правило, синхронные двигатели больше подходят для приложений, требующих постоянной скорости, высокой мощности или точного управления, таких как насосы, компрессоры или конвейеры. Асинхронные двигатели больше подходят для приложений, требующих переменной скорости, низкой мощности или простого управления, таких как вентиляторы, воздуходувки или смесители. Вы также должны учитывать доступность, стоимость и техническое обслуживание двигателя и его компонентов.
Характеристики двигателя
Для сравнения синхронных и асинхронных двигателей необходимо понимать некоторые ключевые характеристики, которые описывают их характеристики и поведение. К ним относится скорость вращения двигателя, измеряемая в оборотах в минуту (об/мин). Синхронные двигатели имеют фиксированную скорость, которая зависит от частоты питания и количества полюсов, а асинхронные двигатели имеют переменную скорость, зависящую от скольжения. Вращающее усилие двигателя измеряется в ньютон-метрах (Нм) или фунт-футах (фунт-фут), при этом синхронные двигатели имеют постоянный крутящий момент, не зависящий от нагрузки, а асинхронные двигатели имеют переменный крутящий момент, который зависит от нагрузки. нагрузка и скольжение. Механическая выходная мощность двигателя измеряется в ваттах (Вт) или лошадиных силах (л. с.), при этом синхронные двигатели имеют постоянную мощность, пропорциональную крутящему моменту и скорости, а асинхронные двигатели имеют переменную мощность, пропорциональную крутящему моменту и квадрат скорости. Наконец, коэффициент мощности — это отношение реальной мощности к кажущейся мощности, которое показывает, насколько эффективно двигатель использует электрическую энергию. Синхронные двигатели имеют высокий коэффициент мощности, который можно регулировать изменением тока возбуждения, в то время как асинхронные двигатели имеют низкий коэффициент мощности, который уменьшается с нагрузкой и скольжением.
нагрузка и скольжение. Механическая выходная мощность двигателя измеряется в ваттах (Вт) или лошадиных силах (л. с.), при этом синхронные двигатели имеют постоянную мощность, пропорциональную крутящему моменту и скорости, а асинхронные двигатели имеют переменную мощность, пропорциональную крутящему моменту и квадрат скорости. Наконец, коэффициент мощности — это отношение реальной мощности к кажущейся мощности, которое показывает, насколько эффективно двигатель использует электрическую энергию. Синхронные двигатели имеют высокий коэффициент мощности, который можно регулировать изменением тока возбуждения, в то время как асинхронные двигатели имеют низкий коэффициент мощности, который уменьшается с нагрузкой и скольжением.
КПД двигателя
Другой важной характеристикой, которую следует учитывать, является КПД двигателя, который представляет собой отношение механического выхода к электрическому входу, выраженное в процентах. КПД двигателя зависит от нескольких факторов, таких как конструкция, размер, скорость, нагрузка, температура и потери двигателя. Синхронные двигатели имеют более высокий КПД, чем асинхронные двигатели, особенно при высоких нагрузках и скоростях. Это связано с тем, что синхронные двигатели имеют меньшие потери, такие как потери в меди, потери в стали, потери на ветер и потери на трение. Асинхронные двигатели имеют более высокие потери, особенно при малых нагрузках и скоростях. Это связано с тем, что асинхронные двигатели имеют дополнительные потери, такие как потери в сердечнике, потери в роторе и потери на скольжение.
Синхронные двигатели имеют более высокий КПД, чем асинхронные двигатели, особенно при высоких нагрузках и скоростях. Это связано с тем, что синхронные двигатели имеют меньшие потери, такие как потери в меди, потери в стали, потери на ветер и потери на трение. Асинхронные двигатели имеют более высокие потери, особенно при малых нагрузках и скоростях. Это связано с тем, что асинхронные двигатели имеют дополнительные потери, такие как потери в сердечнике, потери в роторе и потери на скольжение.
Управление двигателем
Последней характеристикой, которую необходимо рассмотреть, является управление двигателем, то есть метод регулирования скорости, крутящего момента, направления и других параметров двигателя. Управление двигателем может осуществляться с помощью различных устройств, таких как переключатели, реле, контакторы, автоматические выключатели, предохранители, трансформаторы и контроллеры. Для синхронных двигателей требуются более сложные и дорогие устройства управления, чем для асинхронных двигателей, такие как частотно-регулируемые приводы, контактные кольца или бесщеточные системы возбуждения. Для асинхронных двигателей требуются более простые и дешевые устройства управления, чем для синхронных двигателей, такие как реостаты, конденсаторы или устройства плавного пуска.
Для асинхронных двигателей требуются более простые и дешевые устройства управления, чем для синхронных двигателей, такие как реостаты, конденсаторы или устройства плавного пуска.
Вот что еще нужно учитывать
Здесь можно поделиться примерами, историями или идеями, которые не вписываются ни в один из предыдущих разделов. Что бы вы еще хотели добавить?
Оцените эту статью
Мы создали эту статью с помощью ИИ. Что вы думаете об этом?
Это здорово
Это не так здорово
Спасибо за ваш отзыв
Ваш отзыв является частным. Поставьте лайк или отреагируйте, чтобы перенести разговор в свою сеть.
Области применения, преимущества и недостатки
A Синхронный двигатель — тип двигателя переменного тока, в котором скорость вращения вала равна частоте подаваемого тока. Другими словами, синхронный двигатель работает так же, как двигатель переменного тока, с той разницей, что общее число оборотов вала синхронного типа равно целому кратному частоте приложенного тока.
Другими словами, синхронный двигатель работает так же, как двигатель переменного тока, с той разницей, что общее число оборотов вала синхронного типа равно целому кратному частоте приложенного тока.
Работа синхронного двигателя не зависит от индукционного тока. В этом типе двигателя, в отличие от асинхронных двигателей, на статоре находятся многофазные электромагниты переменного тока, создающие вращающееся магнитное поле. В синхронном режиме ротор состоит из постоянных магнитов, которые синхронизированы с вращающимся магнитным полем и вращаются синхронно с частотой приложенного к нему тока.
Синхронный двигатель
Применение синхронных двигателей включает:
В основном синхронные двигатели используются для «коррекции коэффициента мощности», что означает улучшение коэффициента мощности системы.
Синхронные двигатели используются для регулирования напряжения
Синхронные двигатели обычно используются для низкоскоростных нагрузок с высокой мощностью.
Синхронные двигатели обычно используются в воздушных и газовых компрессорах и вакуумных насосах.
Синхронные двигатели также могут использоваться в дробилках, мельницах и измельчителях.
Они также используются для вытяжки, вентиляторов и воздуходувок.
Преимущества синхронных двигателей:
Преимущество использования синхронных двигателей заключается в том, что коэффициент мощности можно контролировать. Перевозбужденные синхронные двигатели имеют перевозбужденный коэффициент мощности и работают параллельно с асинхронными двигателями, тем самым увеличивая коэффициент мощности системы.
Скорость остается постоянной независимо от нагрузки синхронного двигателя. Это качество помогает промышленным машинам, которым требуется постоянная скорость независимо от нагрузки.
Синхронные двигатели имеют более широкий воздушный зазор, чем Асинхронные двигатели , что делает их более механически стабильными.
Электромагнитная мощность линейно зависит от напряжения в синхронном двигателе.