Содержание
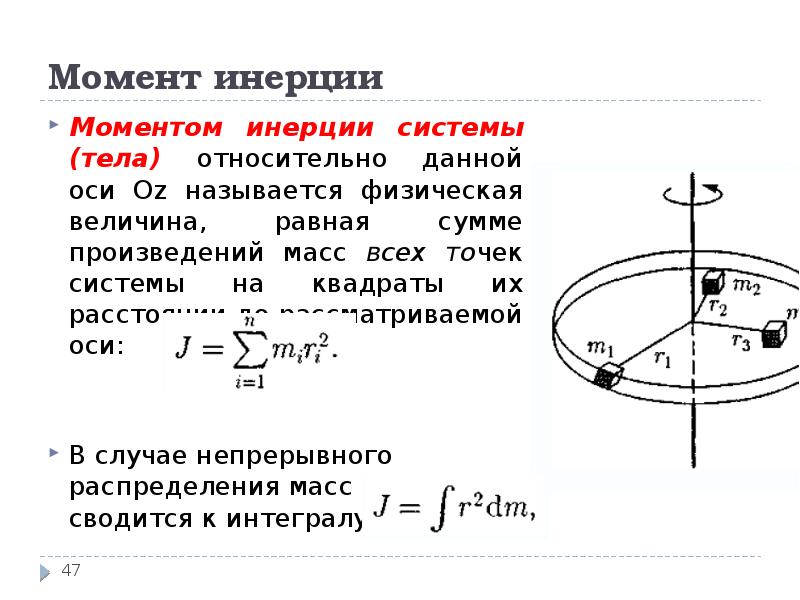
Момент инерции нагрузки и обратная ЭДС шагового двигателя
При выборе шагового двигателя первой характеристикой, на которую обращают внимание, является его выходной
крутящий
момент. Сразу как следствие возникает вопрос о скорости работы шагового двигателя, так как этот параметр
напрямую
связан с моментом. Технически подкованные пользователи следующим этапом принимают во внимание момент инерции
нагрузки,
приведенной к валу двигателя, так как инерционность нагрузки влияет и на требуемый момент, и на точность
позиционирования (вернее, на поведение двигателя при разгоне и торможении). Совсем немногие специалисты
знают о связи
момента инерции с вибрацией двигателя и резонансной частотой двигателя, и принимают во внимание этот аспект.
Однако,
почти никогда пользователи не учитывают, что инерционная нагрузка в некоторых случаях является причиной
выхода из
строя шаговых приводов и приводит к непредсказуемым последствиям в результате возникновения больших величин
ЭДС.
купить шаговый двигатель
купить блок управления шаговым двигателем
Давайте вспомним, что такое инерционность нагрузки. Момент инерции — это характеристика объекта, которая
препятствует
изменению его угловой скорости. В случае разгона двигателя инерционность нагрузки создает дополнительный
момент
сопротивления, который привод должен преодолеть, и ограничивает максимальные значения скорости и ускорения,
при
которых шаговый двигатель будет работать. В случае замедления и остановки момент инерции мешает торможению
нагрузки.
Еще одна важная особенность работы любого электродвигателя — генерирование обратной электро-движущей силы.
Вспомним,
что по законам электродинамики на проводник с током, помещенный в магнитное поле, действует сила Ампера,
которая
создает крутящий момент. Верно и обратное — при движении проводника в магнитном поле в нем (проводнике)
возникает
электрический ток (генерируется ЭДС). Таким образом очевидно, что шаговый двигатель может работать и как
генератор. Однако, если работа двигателя в качестве генератора не
контролируется, это
свойство может приводить к негативным последствиям.
При запитанных фазах и корректной коммутации обмоток драйвером движение вала двигателя контролируется
блоком
управления. В случае внезапного отключения питания фаз двигателя (например, при срабатывании аварийного
датчика или
обрыве фазы) во время работы на высокой скорости момент инерции нагрузки вызывает дальнейшее вращение
ротора. В этот
В этот
момент вращающийся ротор работает как генератор, продуцируя некоторое значение обратной ЭДС. Чем выше
скорость
вращения и чем больше индуктивность фаз двигателя, тем выше это значение. В случае, когда инерционность
нагрузки
велика, а привод работает на больших скоростях, это значение обратной ЭДС может быть сравнимо или
превосходить
напряжение, подаваемое на двигатель при коммутации фаз. Это явление зачастую приводит к выходу из строя
силовой цепи
драйвера управления шаговым двигателем и порче оборудования.
Так как из-за недостаточности исходных данных расчет обратной ЭДС обычно не делается, есть общая
рекомендация по
выбору шагового двигателя ля работы с инерционной нагрузкой: момент инерции нагрузки должен быть сопоставим
с моментом
инерции ротора двигателя. Рекомендуемые соотношения моментов инерции — 1:1. ..1:10. При больших величинах
..1:10. При больших величинах
момента
инерции могут возникать и проблемы с позиционированием, ухудшаются динамические характеристики системы,
возникает
опасность выхода системы из строя под воздействием больших величин обратной ЭДС.
Таким образом, мы хотим напомнить, что важнейшим параметром при подборе шагового двигателя является момент
инерции
нагрузки по нескольким причинам:
- Момент инерции нагрузки, приведенный к валу шагового двигателя, влияет на положение пиков резонанса на
кривой
зависимости момента от скорости. - Инерционность нагрузки влияет на вибрацию и шум при работе шагового двигателя.
- Момент инерции нагрузки участвует в создании момента сопротивления при разгоне привода.
- В случае, если инерционность нагрузки слишком большая, может ухудшиться точность позиционирования в
результате пропуска двигателем шагов.
- При чрезмерно инерционной нагрузке шаговый двигатель не сможет стартовать.
- Инерционная нагрузка приводит к возникновению обратной ЭДС, которая может вывести из строя блок
управления и сопутствующее оборудование.
Экспериментальное определение моментов инерции ротора электродвигателя
Не всегда значение маховых моментов или моментов инерции роторов или якорей электрических машин можно найти в каталогах электрооборудования. Также в данный момент на предприятиях эксплуатируется большое количество электрических машин, данные на которые могут потеряться в ходе эксплуатации. Если данные о маховом моменте электрической машины отсутствуют, то их можно определить экспериментально с помощью методов:
- Крутильных колебаний;
- Маятниковых колебаний;
- Падающего груза;
- Свободного выбега;
Содержание:
- Метод крутильных колебаний
- Метод маятниковых колебаний
- Метод падающего груза
- Метод свободного выбега
Метод крутильных колебаний
Суть данной методики заключается в следующем: ротор электромашины подвешивают на стальной проволоке за конец вала. Второй конец проволоки жестко закрепляют на опоре, как показано на рисунке ниже (а):
Второй конец проволоки жестко закрепляют на опоре, как показано на рисунке ниже (а):
При таком определении момента инерции нужно строго обеспечить вертикальность оси вала ротора. После чего ротор, подвешенный на проволоке, закручивают на определенный угол и подсчитывают количество полных колебаний z, которые ротор совершит за какой – то промежуток времени t. Период полного колебания, если пренебречь затуханием, можно представить:
Где k – направляющий момент проволоки (момент, вызывающий закручивание проволоки на 1 радиан). Если мы знаем k, то момент инерции ротора можно определить из следующего выражения:
k можно определить исходя из размеров проволоки:
Где Е – модуль кручения для материала проволоки в кГ/см2;
r и l – радиус и длина проволоки в см соответственно.
Так как формула не дает точного значения k, более точно можно определить его из опыта. Для этого нужно измерять вращающий момент М, необходимый для закручивания проволоки на угол α. Тогда:
Тогда:
Но еще проще произвести определение момента инерции на основе двух опытов крутильных колебаний ротора. Для этого измеряют продолжительность полного колебания как указано выше. Второе измерение периода колебания ротора производят с прикрепленным к нему телом, момент инерции которого известен Jдоб. Как вариант, это может быть диск с известными геометрическими размерами и весом или рычаг с грузами на концах (рис. выше б). если Т – период колебаний одного ротора, а Т/ — с добавочным грузом, тогда получим выражение:
Благодаря пропорциональности между углом отклонения и направляющим моментом угол первоначального закручивания может быть взят произвольным.
Метод маятниковых колебаний
Ротор машины крепят проволокой к куску угловой стали так, чтоб вершину уголка можно было использовать в качестве призмы, относительно которой ротор электромашины смог бы выполнять колебания. После чего оба конца полученного таким образом маятника опирают на металлические горизонтальные опоры так, чтоб ротор мог относительно точек опоры совершать колебания. Момент его инерции относительно оси, совпадающей с вершиной уголка, при пренебрежении инерцией последнего будет равен:
Момент его инерции относительно оси, совпадающей с вершиной уголка, при пренебрежении инерцией последнего будет равен:
Где: G – это вес ротора машины в кг;
е – расстояние между осью ротора и осью качания, измеряется в м;
Т – период одного колебания в сек.
Зная JN, определяют по общему правилу инерцию ротора относительно оси, проходящей через центр тяжести:
Метод падающего груза
Самым главным недостатком методик, описанных выше, является то, что для определения инерции необходима разборка электромашины. Метод падающего груза позволит определить момент инерции электродвигателя без разборки последнего.
На конец вала или шкив, сидящий на валу, навивают несколько витков шнура. К другому концу шнура прикрепляют груз и опускают его через направляющие блоки, либо непосредственно, как показано ниже:
При опускании груз поворачивает ротор, преодолевая трение в подшипниках электромашины, при этом измеряют время t, за которое груз опустится на величину h.
В таком случае инерция ротора может быть вычислена по формуле:
Где: m – масса груза
r – радиус вала или шкива, на который навивается шнур;
t и h – время, и соответственно высота опускания груза;
g – ускорение свободного падения равное 9,81;
Метод свободного выбега
Перечисленные выше методы определения инерции электрической машины больше подходят к электрическим машинам относительно малой мощности. При значительных габаритных и массовых показателей машин большой мощности определение инерции методами маятниковых колебаний и падающего груза становятся практически не пригодными, и тем более не пригодны в системе электродвигатель – рабочий орган. Поэтому зачастую применяют метод свободного выбега.
Когда двигатель отключают от сети, то за счет накопленной кинетической энергии, двигатель и соединенный с ним рабочий орган будет вращаться замедляясь постепенно. Чем больше тормозящее усилие сил трения и чем меньше запас кинетической энергии, тем быстрее будет замедлятся система. Имея кривую самоторможения, показанную ниже, которая представляет собой график зависимости скорости от времени.
Имея кривую самоторможения, показанную ниже, которая представляет собой график зависимости скорости от времени.
По данной кривой можно сделать вывод о величине тормозных усилий. Мощность торможения в данном случае будет равна уменьшению кинетической энергии во времени:
Подставив в формулу значение кинетической энергии , которая представлена в джоулях, тогда получим:
Из данного выражения можно определить момент инерции:
Величину поднормали определяют из кривой торможения для точки, в которой известны потери энергии при торможении. Если масштабы выбраны, то для построения кривой самоторможения: µn = об/мин/см – скорость, µt = сек/см – времени. В таком случае масштаб поднормали будет равен: , то есть , где СВ выражена в см.
Момент инерции | Определение, формула и расчет
У вас возникла проблема и вам нужен наш сервис?
Наши специалисты Baumüller Services занимаются ремонтом , капитальным ремонтом, запасными частями, заменой двигателей и электроники , а также многими другими вопросами послепродажного обслуживания.
Обратитесь в Baumüller Services
Опишите нам свой запрос, и ответственное контактное лицо свяжется с вами в кратчайшие сроки.
Сообщение
Неверный ввод
Компания и контактное лицо
Приветствие
Г-н
Г-жа
Неверный ввод
Имя
Пожалуйста, введите имя 900 07 Фамилия (*)
Пожалуйста, заполните фамилию
Фамилия
Неверный ввод
Компания (*)
Пожалуйста, заполните название компании
Страна (*)
Пожалуйста, выберите—Uni Тед КоролевствоСоединенные ШтатыИрландияИндия—АфганистанАландские островаАлбанияАлжирАмериканское СамоаАндорраАнголаАнгильяАнтарктидаАнтигуа и БарбудаАргентинаАрменияАрубаАвстралияАвстрияАзербайджанБагамыБахрейнБангладешБарбадосБеларусьБельгияБелизБенинБермудыБутанБоливияБонайре, Синт-Эстатиус и СабаБосния и ГерцеговинаБотсванаОстров БувеБразилияБританская территория в Индийском океанеБрунейБолгарияБуркина-ФасоБурундиКамбоджаКамерунКанадаКабо-ВердеКаймановы островаЦентральноафриканская РеспубликаЧадЧилиКитайОстров РождестваКокосовые острова (Килинг)КолумбияКоморские островаКонгоОстрова КукаКоста-РикаКот-д’ИвуарХорваты иаКубаКюрасаоКипрЧехияДемократическая Республика КонгоДанияДжибутиДоминикаДоминиканская РеспубликаЭквадорЕгипетСальвадорЭкваториальная ГвинеяЭритреяЭстонияЭфиопияФолклендские (Мальвинские) островаФарерские островаФиджиФинляндияФранцияФранцузская ГвианаФранцузская ПолинезияФранцузские Южные ТерриторииГабонГамбияГрузияГерманияГанаГибрал деготьГрецияГренландияГренадаГваделупаГуамГватемалаГернсиГвинеяГвинея-БисауГайанаГаитиСлышали Острова и острова МакдональдыГондурасГонконгВенгрияИсландияИндияИндонезияИранИракИрландияОстров МэнИзраильИталияЯмайкаЯпонияДжерсиИорданияКазахстанКенияКирибатиКосовоКувейтКыргызстанЛаосЛатвияЛиванЛесотоЛиберияЛивияЛихтенштейнЛитваЛюксембургМакаоМакедонияМадагаскар МалавиМалайзияМальдивыМалиМальтаМаршалловы островаМартиникаМавританияМаврикийМайоттаМексикаМикронезияМолдаваМонакоМонголияЧерногорияМонтенегроМонтсерратМароккоМозамбикМьянма (Бирма)НамибияНауруНепалНидерландыНовая КаледонияНовая ЗеландияНикарагуаНигерНигерияНиуэ Остров НорфолкСеверная КореяСеверные Марианские острова НорвегияОманПакистанПалауПалестинаПанамаПапуа-Новая ГвинеяПарагвайПеруФилиппиныПиткэрнПольшаПортугалияПуэрто-РикоКатарРеюньонРумынияРоссияРуандаСент-БартельмиСент-ХеленаСент-Китс и НевисСент-ЛюсияСен-МартинСен-Пьер и МикелонСент-Винсент и ГренадиныСамоаСан-МариноСан-Томе и ПринсипиСаудовская Аравия enegalСербияСейшельские островаСьерра-ЛеонеСингапурСинт-МартенСловакияСловенияСоломоновы островаСомалиЮжная АфрикаЮжная Георгия и Южные Сандвичевы островаЮг КореяЮжный СуданИспанияШри-ЛанкаСуданСуринамШпицберген и Ян-МайенСвазилендШвецияШвейцарияСирияТайваньТаджикистанТанзанияТаиландТимор-Лешти (Восточный Тимор)ТогоТокелауТонгаТринидад и ТобагоТунисТурцияТуркменистанОстрова Теркс и КайкосТувалуУгандаУкраинаОбъединенные Арабские ЭмиратыВеликобританияСШАУругвайУз БекистанВануатуВатиканВенесуэлаВьетнамВиргинские острова, Британские Виргинские острова, СШАУоллис и ФутунаЗападная СахараЙеменЗамбияЗимбабве
Пожалуйста, выберите страну
Улица, номер
Пожалуйста, укажите улицу и номер
Почтовый индекс (*)
Пожалуйста, укажите почтовый индекс
Город (*) 900 06
Неверный ввод
Пожалуйста, укажите местонахождение вашей компании, чтобы мы могли найти нужное контактное лицо для вашего региона.
Как бы вы хотели, чтобы с вами связались?
по телефону
по электронной почте
Bitte geben Sie an, wie wir Sie kontaktieren sollen.
Код страны
Неверный ввод
Телефон
Неверный ввод
completePhone
Неверный ввод
Электронная почта (*)
Частные домены электронной почты исключены
Spamschutz (*)
Защита от спама не удалась.
Поля, отмеченные звездочкой (*), обязательны для заполнения.
Хотите связаться с нами напрямую?
Baumüller Nürnberg GmbH
Ostendstraße 80-90
90482 Нюрнберг
Германия
+49 911 5432 0
[email protected]
Требования к крутящему моменту и усилию — Dover Motion
Крутящий момент необходим как для преодоления трения в гайке, так и для ускорения двигателя и нагрузки до необходимого максимальная скорость.

Аналогичным образом, в линейных двигателях требуется усилие для преодоления трения в направляющих, сил изгиба кабеля, а также для ускорения движущейся массы сцены и пользовательской полезной нагрузки. В общем, расчеты такого рода имеют наибольший смысл (и намного проще) при использовании системы единиц МКС. Единицей крутящего момента МКС является ньютон-метр (Н-м), а соответствующей единицей инерции вращения — килограмм-метр в квадрате (кг-м2).
Вращающийся двигатель Пример
Нагрузка, которая должна быть ускорена, состоит из ручки ручного позиционирования, ротора двигателя, гибкой муфты вала, ходового винта, подвижной части позиционирующего стола и пользовательской полезной нагрузки. Вращательная инерция (J) ручки, используемой на столах для позиционирования DOVER, составляет 6,3 x 10-6 кг-м2, в то время как инерция винтовой муфты вала составляет 2,2 x 10-6 кг-м2. Инерция ротора зависит от размера и длины корпуса двигателя. Конкретные значения инерции ротора для шести стандартных двигателей следующие:
Инерция ротора
Шаговые двигатели:
17-я рама, 0,16 Н-м (23 унции-дюйм) удерживающий момент: 3 x 10 6 кг-м 2
23-я рама, 0,38 Н -м (50 унций в) холдинг крутящий момент: 11 x 10 6 кг-м 2
Рама 23, 0,71 Н-м (100 унций-дюйм) удерживающий момент: 23 x 10 6 кг-м 2
Серводвигатель с:
40 мм квадратный бесщеточный: 5,65 x 10 6 кг-м 2
50 мм квадратный бесщеточный: 38,1 x 10 6 кг-м 2
Серводвигатель щетки: 26,1 x 10 6 кг-м 2
В зависимости от размера наши столы могут быть снабжены ходовыми винтами с наружным диаметром ~12 мм или ~18 мм, инерция вращения которых составляет 2,7 х 10-6 и 1,2 х 10-5 кг-м2 на 100 мм хода соответственно. Процесс определения требуемого крутящего момента для данного приложения начинается с добавления вращательной инерции ручки, ротора двигателя, муфты и ходового винта. Масса полезной нагрузки пользователя и движущаяся масса позиционирующего стола затем должны быть суммированы и преобразованы в эквивалентную инерцию вращения по следующей формуле:0007
Процесс определения требуемого крутящего момента для данного приложения начинается с добавления вращательной инерции ручки, ротора двигателя, муфты и ходового винта. Масса полезной нагрузки пользователя и движущаяся масса позиционирующего стола затем должны быть суммированы и преобразованы в эквивалентную инерцию вращения по следующей формуле:0007
Ротационная интерция таблицы и нагрузки
j: инерция вращения, в кг-м 2
м: общая движущаяся масса, в кг
свинцовый: винт, в M
E: Эффективность винта
Эффективность ходового винта обычно составляет 0,6 для наших ходовых винтов с противозазорными гайками и 0,9 для шариковых винтов. Подвижные массы одноосных столиков, а также подвижные массы по верхней и нижней осям для столов X-Y перечислены вместе со спецификациями для каждого стола. Наконец, полная инерция вращения преобразуется в крутящий момент, который при суммировании с крутящим моментом трения равен общему требуемому крутящему моменту. Момент трения столов для позиционирования DOVER поддерживается в пределах от 0,03 до 0,06 Н·м для ходовых винтов с наружным диаметром 12 мм и в пределах от 0,06 до 0,09.Н-м для винтов с наружным диаметром 18 мм. Хотя гайку можно отрегулировать на более низкие значения крутящего момента, это может снизить ее превосходную повторяемость (1-2 микрона) и уменьшить осевую жесткость. Благодаря наличию смазочной пленки трение между ходовым винтом и гайкой увеличивается с увеличением оборотов, а также при более низких температурах.
Момент трения столов для позиционирования DOVER поддерживается в пределах от 0,03 до 0,06 Н·м для ходовых винтов с наружным диаметром 12 мм и в пределах от 0,06 до 0,09.Н-м для винтов с наружным диаметром 18 мм. Хотя гайку можно отрегулировать на более низкие значения крутящего момента, это может снизить ее превосходную повторяемость (1-2 микрона) и уменьшить осевую жесткость. Благодаря наличию смазочной пленки трение между ходовым винтом и гайкой увеличивается с увеличением оборотов, а также при более низких температурах.
В качестве примера рассмотрим XYL-1515-SM, координатный стол для перемещения 300 мм x 300 мм (12″ x 12″). Он поставляется со стандартным двигателем и имеет движущуюся массу верхней оси 8,6 кг. Предположим, что ход винта составляет 5 мм (0,005 м), диаметр ходового винта — 18 мм, а полезная нагрузка пользователя — 23 кг. Этот груз должен быть ускорен со скоростью 2 метра в секунду в квадрате. Для начала просуммируем вращательные инерции соответствующих компонентов:
Сумма моментов инерции вращения
Дж Ручка = 6,3 x 10 6 кг-м 2
Дж Муфта = 2,2 x 10 6 кг-м 2
Дж Двигатель = 23 x 10 6 кг -м 2
J Ходовой винт = 12 x 10 6 кг-м 2 x (300 мм/100 мм) = 36 x 10 6 кг-м 2
Суммарная инерция вращения = 1,0 x 10 -4 кг-м 2
Обратите внимание, что инерция вращения ходового винта больше, чем у полезной нагрузки.
Формула для преобразования инерции вращения в крутящий момент выглядит следующим образом:
Крутящий момент
T = J x A / Шаг
T: крутящий момент, Н-м
J: инерция вращения, кг-м 2
A: ускорение , в м/с 2
Свинец: шаг винта, в м/рад
В данном случае
(Помните, Ньютон равен кг-м/с2). В сумме с моментом трения 0,09 Н·м это дает требуемый общий крутящий момент 0,34 Н·м. Это меньше, чем удерживающий момент двигателя 0,70 Н·м. Однако крутящий момент двигателя падает со скоростью; пересечение требуемого крутящего момента с кривой скорости двигателя определяет максимальную скорость, до которой эта нагрузка может быть разогнана без остановки (около 22 оборотов в секунду в приведенном выше случае при использовании DOVER 310M). Увеличение момента трения при 22 об/с из-за вязкостного сопротивления смазочного материала уменьшит эту достижимую максимальную скорость, возможно, до 12 об/с. Приняв запас прочности в 20%, допустима работа на скоростях до 10 оборотов в секунду. Снижение ускорения снизит требования к крутящему моменту, что позволит получить более высокие скорости, но с увеличением общей продолжительности движения. Кривая скорость-момент для данного двигателя зависит от конструкции привода и рабочего напряжения.
Снижение ускорения снизит требования к крутящему моменту, что позволит получить более высокие скорости, но с увеличением общей продолжительности движения. Кривая скорость-момент для данного двигателя зависит от конструкции привода и рабочего напряжения.
В приведенном выше примере роторного двигателя представлены конкретные числовые отношения между инерцией различных компонентов стола и формулы, связывающие инерцию с требуемым крутящим моментом. Степень точности может ввести в заблуждение; множество небольших, трудно поддающихся количественной оценке эффектов, включая вязкость смазки, шаг гайки в зависимости от эффективности и т. д., вступают в сговор, чтобы победить чисто количественный подход к нагрузке и размеру двигателя. В частности, мнения расходятся относительно приемлемого запаса прочности для систем с шаговыми двигателями, который может составлять от 10 до 30 процентов. По возможности рекомендуется проводить реальное моделирование приложения до принятия набора критериев производительности.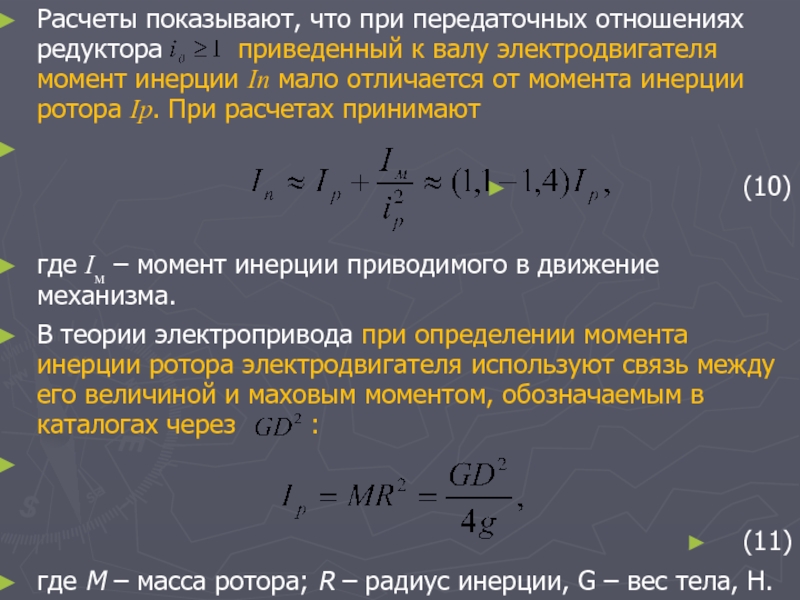 Вертикально ориентированные приложения, например, изменяют эффективность гаек таким образом, что это трудно предсказать заранее. В DOVER мы регулярно «выходим на первый план», устанавливая фиктивные нагрузки и максимально точно копируя предлагаемую конфигурацию. При выборе двигателя для достижения конкретных результатов рекомендуется проконсультироваться с нашими инженерами по применению.
Вертикально ориентированные приложения, например, изменяют эффективность гаек таким образом, что это трудно предсказать заранее. В DOVER мы регулярно «выходим на первый план», устанавливая фиктивные нагрузки и максимально точно копируя предлагаемую конфигурацию. При выборе двигателя для достижения конкретных результатов рекомендуется проконсультироваться с нашими инженерами по применению.
Пример линейного двигателя
Эти системы значительно проще, чем ступени на основе роторного двигателя. Почти все, что вам нужно, это второй закон Ньютона: F = m x a. Подвижная масса ступени и масса полезной нагрузки заказчика складываются для получения общей движущейся массы (в кг), которая умножается на желаемое ускорение в метрах в секунду в квадрате. Одна буква G равна 9,8 м/с в квадрате. Движущаяся масса 10 кг и ускорение 5 м/с2 потребуют силы 50 ньютонов. К этому следует добавить силу трения путей и любые другие силы, такие как силы изгиба кабельной петли. Если в сумме это 10 ньютонов (всего 60 ньютонов), а силовая постоянная линейного двигателя составляет 15 ньютонов на ампер, то пиковый ток катушки будет 4,0 ампера.