|
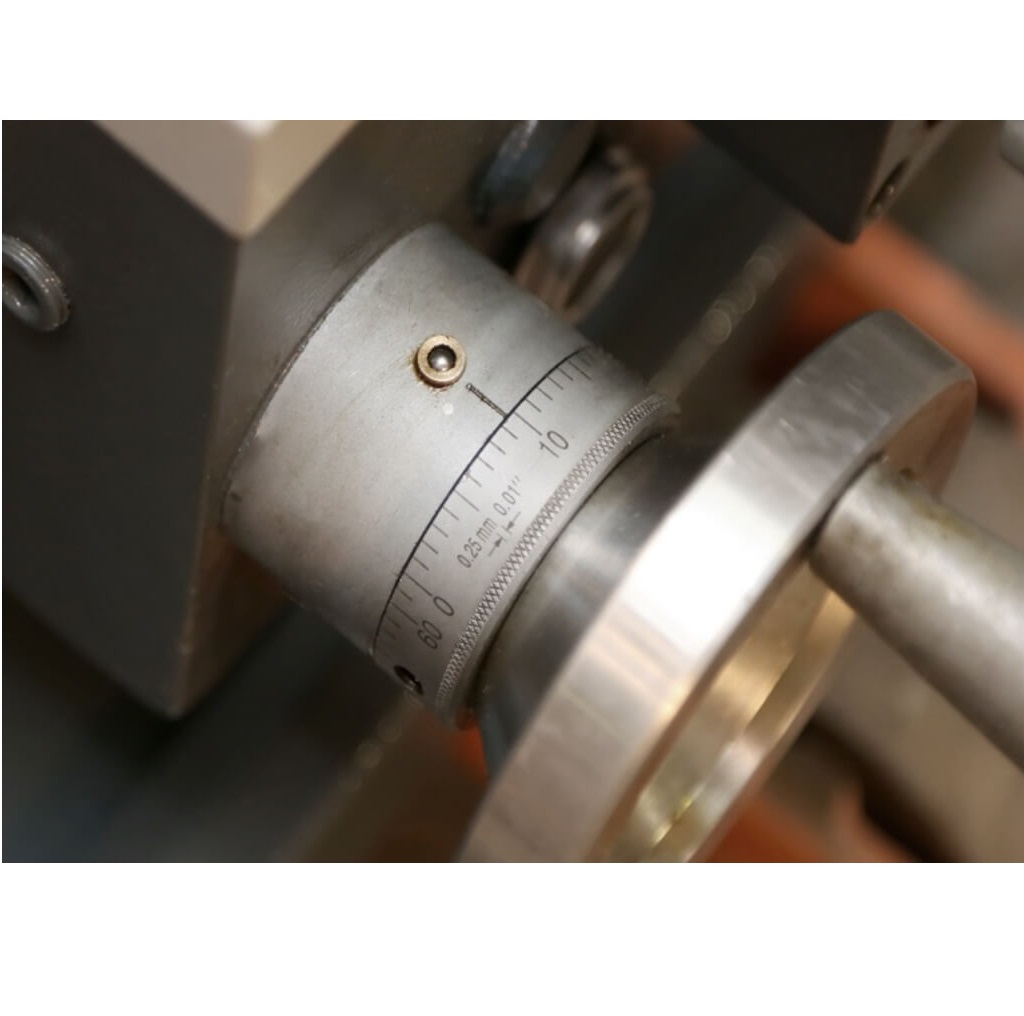
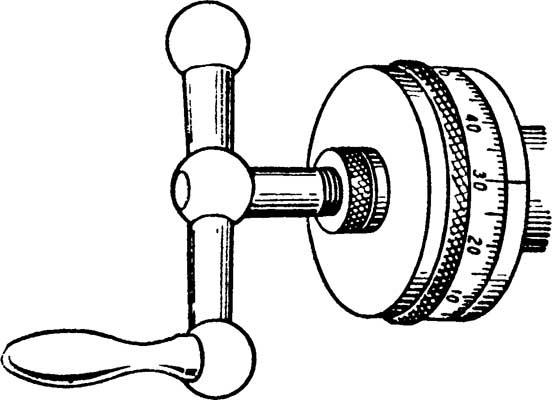
Механизмы для отсчета продольных и поперечных перемещений резца Категория: Токарные станки Механизмы для отсчета продольных и поперечных перемещений резца Лимбы. Лимбы, применяемые в точных станках, стремятся делать возможно большего диаметра для уменьшения цены деления и увеличения расстояния между штрихами. Для удобства отсчета перемещений, когда лимб делает несколько оборотов, в современных станках применяют двухразрядные лимбы как для поперечного, так и для продольного перемещений. В точных станках на одно деление лимба предусматривают поперечное смещение салазок 0,01 или 0,02 мм. Меньшую цену деления лимбов получить практически трудно. Для упрощения расчетов при измерениях цену деления лимба поперечных салазок рассчитывают на диаметр (т. е. удваивают). Для облегчения пользования лимбом при расточных работах фирма «VDF» (ФРГ) выполняет рядом с основным дополнительный лимб с увеличением делений против часовой стрелки. Рис. 1. Двухразрядный лимб станка 16Б11П Передаточное отношение механизма привода определяется из отношения, где D — максимальный диаметр обрабатываемого изделия в мм, at — шаг винта в мм. Отсчет показаний лимбов делается относительно риски на промежуточном кольце 5. Общее перемещение складывается из суммы показаний двух лимбов. На рис. 2 изображен двухразрядный лимб станка 16Б2 П (D 400 мм) унифицированной гаммы для продольной подачи. Наличие таких малых перемещений за один оборот лимба, как 20 и 28 мм, является недостатками станков 1И611П и 1Е61М. Рис. 2. Двухразрядный лимб станка 16Б20П На станке 1Е61М величина продольного перемещения фактически составляет 27,9252 мм, что приводит к значительным ошибкам при расчетех (на длине 640 мм ошибка составляет 1,72 мм). Для продольной подачи цену деления лимба лучше принимать равной 0,1 мм или 1 мм. Применение лимба с ценой деления 0,1 позволяет точнее произвести отсчет перемещений, но при быстром его вращении отсчет становится затруднительным. Приходится окончание перемещения производить с замедлением подачи, что не всегда возможно и целесообразно, поэтому в более крупных станках, работающих с большими подачами, применяются лимбы с ценой деления 1 мм. В этих лимбах в результате дополнительных цилиндрических передач и внутреннего зацепления происходит снижение скорости вращения лимба. При значительных перемещениях эти лимбы делают несколько оборотов и их необходимо считать для определения всего перемещения, что требует дополнительного внимания и не исключает ошибок. Рис. 3. Поперечный индикаторный упор Индикаторные упоры. Увеличение точности отсчета перемещения можно получить с помощью индикаторного упора. Индикатор с помощью державки крепят к салазкам. Упор индикатора устанавливают на планке, которую закрепляют на каретке. Для отсчета продольных перемещений индикатор устанавливают в закрытый кронштейн, защищающий его от стружки и эмульсии, и закрепляют на полке станины. Упор на каретке суппорта действует через деталь на индикаторный штифт, предохраняющий штифт индикатора от поломки. Отсчетные микроскопы. Для точных отсчетов перемещений применяют отсчетные микроскопы. Рис. 4. Продольный индикаторный упор Рис. 5. Принципиальная схема микроскопа типа МО Допустим, необходимо передвинуть салазки на величину. Реклама:Читать далее:Конструкции суппортов и задних бабок токарных станков
Статьи по теме:
Главная → Справочник → Статьи → Блог → Форум
|
|
|
 На рис. 1 изображен двухразрядный лимб поперечных салазок станка 16Б11П. Лимб 6 с ценой деления 0,05 мм па диаметр обрабатываемого изделия (перемещение 0,025 мм) посажен непосредственно на винт с помощью шпонки. Лимб с ценой деления 10 мм на диаметр делает один оборот за все перемещение салазок, тем самым оператор освобожден от необходимости вести счет оборотов первого лимба (с ценой деления 0,05 на диаметр). Вращение лимба осуществляется с помощью червяка, нарезанного на шейке винта, винтового зубчатого колеса, повернутого на некоторый угол, и цилиндрического зубчатого колеса с внутренним зацеплением.
На рис. 1 изображен двухразрядный лимб поперечных салазок станка 16Б11П. Лимб 6 с ценой деления 0,05 мм па диаметр обрабатываемого изделия (перемещение 0,025 мм) посажен непосредственно на винт с помощью шпонки. Лимб с ценой деления 10 мм на диаметр делает один оборот за все перемещение салазок, тем самым оператор освобожден от необходимости вести счет оборотов первого лимба (с ценой деления 0,05 на диаметр). Вращение лимба осуществляется с помощью червяка, нарезанного на шейке винта, винтового зубчатого колеса, повернутого на некоторый угол, и цилиндрического зубчатого колеса с внутренним зацеплением.
 Чтобы избежать необходимости счета и запоминания количества оборотов лимба, в современных станках применяют счетчики оборотов или дополнительные лимбы для продольного перемещения с ценой деления 10 и 100 мм. В последнем случае стремятся к тому, чтобы дополнительный лимб сделал не более одного полного оборота за возможное продольное перемещение суппорта.
Чтобы избежать необходимости счета и запоминания количества оборотов лимба, в современных станках применяют счетчики оборотов или дополнительные лимбы для продольного перемещения с ценой деления 10 и 100 мм. В последнем случае стремятся к тому, чтобы дополнительный лимб сделал не более одного полного оборота за возможное продольное перемещение суппорта. Принципиальная схема простейшего микроскопа изображена на рис. 5. Цена деления микроскопа 0,01 мм, увеличение десятикратное. Луч от источника света, как показано стрелками, через конденсатор и преломляющую призму направляется на линейку. Освещенное изображение линейки через объектив и систему зеркал проектируется с десятикратным увеличением на матовую поверхность стеклянного экрана; на экране нанесены две риски. Этот экран помещают на планке, передвигающейся по направляющим детали. Выше планки имеется кулачок с архимедовой спиралью, который осуществляет перемещение планки с экраном по направляющим. На одной оси с кулачком насажен отсчетный барабан, имеющий 100 делений. Перед началом отсчета устанавливают суппорт в исходное положение, а линейку ставят так, чтобы нулевой штрих линейки оказался между двумя рисками на экране.
Принципиальная схема простейшего микроскопа изображена на рис. 5. Цена деления микроскопа 0,01 мм, увеличение десятикратное. Луч от источника света, как показано стрелками, через конденсатор и преломляющую призму направляется на линейку. Освещенное изображение линейки через объектив и систему зеркал проектируется с десятикратным увеличением на матовую поверхность стеклянного экрана; на экране нанесены две риски. Этот экран помещают на планке, передвигающейся по направляющим детали. Выше планки имеется кулачок с архимедовой спиралью, который осуществляет перемещение планки с экраном по направляющим. На одной оси с кулачком насажен отсчетный барабан, имеющий 100 делений. Перед началом отсчета устанавливают суппорт в исходное положение, а линейку ставят так, чтобы нулевой штрих линейки оказался между двумя рисками на экране. Целое число миллиметров устанавливается по линейке с помощью указателя грубого отсчета, а сотые доли миллиметра — с помощью барабана. Если теперь повернуть отсчетный барабан на 25 делений, то экран сместится относительно линейки на 0,25 мм. И если затем передвинуть суппорт по указателю грубого отсчета на 10 делений, устанавливая штрих десяти делений между двух рисок на экране, то получим перемещение на 10,25 мм.
Целое число миллиметров устанавливается по линейке с помощью указателя грубого отсчета, а сотые доли миллиметра — с помощью барабана. Если теперь повернуть отсчетный барабан на 25 делений, то экран сместится относительно линейки на 0,25 мм. И если затем передвинуть суппорт по указателю грубого отсчета на 10 делений, устанавливая штрих десяти делений между двух рисок на экране, то получим перемещение на 10,25 мм.Лимб — поперечная подача — Большая Энциклопедия Нефти и Газа, статья, страница 2
Cтраница 2
Механическое копировальное устройство, предложенное тока рем-новатором В. К. Семинским. К. Семинским.
[16] |
После каждого выключения продольной подачи токарь по лимбу поперечной подачи вручную устанавливает резец на нужный диаметр следующей ступени валика и вновь включает падающий червяк для точения следующей ступени.
[17]
| Схема обработки за один рабочий ход.
[18] |
Для получения необходимых размеров диаметра вала пользуются лимбом поперечной подачи и устанавливают резец на заданный размер по методу пробных рабочих ходов. У большинства современных токарных станков имеется также продольный лимб, применение которого дает возможность получать продольные размеры с точностью до 0 2 мм. Производительность и точность обработки повышаются, если применяют регулируемые упоры с самовыключением суппорта.
[19]
При установке фрезы на глубину надо пользоваться лимбом поперечной подачи, который устроен таким же образом, как лимб вертикальной подачи, но имеет 250 делений, причем цена одного деления также равна 0 02 мм.
[20]
При установке фрезы на глубину можно пользоваться лимбом поперечной подачи, который устроен так же, как лимб вертикальной подачи, но имеет 120 делений, причем цена одного деления тоже равна 0 05 мм.
[21]
Резец устанавливается на необходимый диаметр обтачиваемой поверхности по лимбу поперечной подачи. Для этого его подводят до касания с поверхностью вращающейся заготовки. Когда появляется слабо заметная риска, резец отводят в сторону, лимб устанавливают на нуль и подают суппорт поперечно вперед на требуемый размер. Механическую продольную подачу включают после того, как резец врежется в металл ручным перемещением суппорта.
[22]
В первом случае ( кривая /) рабочий вынужден пользоваться лимбом поперечной подачи и время от времени останавливать станок для измерения детали вручную с помощью калибров или универсального измерительного инструмента. Количество измерений в течение всего цикла обработки зависит от требуемой точности: чем меньше допуск на деталь, тем чаще и тщательнее требуется ее измерять. При обработке деталей по 1 и 2 классу точности даже опытные рабочие вынуждены прерывать шлифование от двух до пяти раз.
При обработке деталей по 1 и 2 классу точности даже опытные рабочие вынуждены прерывать шлифование от двух до пяти раз.
[23]
За один оборот маховика перемещение бабки равно 1 мм; цена деления лимба поперечной подачи равна 0 0025 мм.
[24]
Для получения необходимой точности диаметра обработки ( 9 — 8-го квалитета) используют лимб поперечной подачи, с помощью которого устанавливают резец по методу пробных проходов. Точность и производительность обработки повышаются при использовании жестких или регулируемых ограничителей хода продольной подачи.
[25]
В станке предусмотрено два вида активного контроля обрабатываемого отверстия: калибрами и по лимбу поперечной подачи. Функциональная циклограмма электросхемы ( табл. 16) описывает работу станка при контроле отверстия калибрами. По достижении определенного размера обрабатываемого отверстия механизм калибров замыкает контакт ГКК и стол станка после кратковременного выхаживания выходит на правку круга. Как только размер обрабатываемого отверстия достигает требуемой величины, замыкается контакт ТНК и стол станка ( также после кратковременного выхаживания) отводится в исходное положение, и станок останавливается. Оператор должен снять обработанную деталь, установить новую заготовку и снова пустить станок рычагом реверса стола.
Как только размер обрабатываемого отверстия достигает требуемой величины, замыкается контакт ТНК и стол станка ( также после кратковременного выхаживания) отводится в исходное положение, и станок останавливается. Оператор должен снять обработанную деталь, установить новую заготовку и снова пустить станок рычагом реверса стола.
[26]
Размеры длины выполняются по лимбу продольной подачи, — а диаметры — по лимбу поперечной подачи.
[27]
| Обработка конца валика при работе с дополнительным резцедержателем.
[28] |
В этом случае необходимо: при углублении каждого из резцов ориентироваться по различным делениям лимба поперечной подачи; после выполнения каждого из переходов поворачивать резцедержатель на новую позицию; при работе по упорам иметь двухпо-зиционный упор или упор с ограничителем длины.
[29]
При установке на заданный размер обработки ( на глубину резания) можно пользоваться и лимбом поперечной подачи, который устроен так же, как и лимб вертикальной подачи, и имеет цену деления, равную 0 05 мм.
[30]
Страницы:
1
2
3
4
8 лучших тренажеров для ног в тренажерном зале для дня ног
Мы все знаем, что никогда не следует пропускать день ног, но со всем количеством тренажеров, которые вы можете использовать для развития нижней части тела, может быть трудно понять, какие тренажеры для ног использовать. .
Если вы обнаружите, что пропускаете день ног, потому что не знаете, что делать или с чего начать, вы обратились по адресу. Сегодня мы рассмотрим восемь лучших тренажеров для ног, их преимущества и несколько советов по безопасности. Вы готовы? Давайте начнем!
Зачем использовать тренажеры для ног в тренажерном зале?
Вам следует использовать тренажеры для ног в тренажерном зале, потому что тренажеры для ног являются одним из наиболее эффективных способов безопасного и контролируемого наращивания мышечной массы. Тренажер проведет вас по схеме движения, обеспечивая большую стабильность, чем при работе со свободными весами. Это означает, что вы можете сосредоточиться на оттачивании формы и техники.
Это означает, что вы можете сосредоточиться на оттачивании формы и техники.
Как только вы овладеете своей формой, вы сможете сосредоточиться на гипертрофии. Поскольку тренажер обеспечивает стабильность, все ваши усилия направляются на основные группы мышц. Это создает прочную основу для перехода к полному весу.
Давайте разберем каждую машину, чтобы вы могли добраться до нее!
Лучшие тренажеры для ног в спортзале
8. Жим ногами
Вероятно, самый популярный тренажер для ног в спортзале. Жим ногами является прекрасным дополнением к приседаниям. Поддержка устройства означает, что требуется меньше баланса и координации. Это изолирует работу ваших квадрицепсов, а это означает, что вы, вероятно, сможете выжать больше, чем приседаете.
Три наиболее распространенных типа тренажеров для жима ногами различаются в зависимости от угла, под которым выполняется упражнение. Вертикальный жим ногами заставит вас лечь на спину. Горизонтальный жим ногами выполняется из положения сидя, а при жиме ногами под углом 45 градусов ваша спина будет согнута под углом 45 градусов. Сидячее положение позволяет безопасно тренироваться при мышечном отказе, используя предохранительные стопоры для предотвращения травм.
Сидячее положение позволяет безопасно тренироваться при мышечном отказе, используя предохранительные стопоры для предотвращения травм.
Одним из преимуществ тренажера для жима ногами является то, что вы можете переключать внимание на разные мышцы, меняя положение стопы. Для квадрицепсов поставьте ноги на ширине плеч, ноги на 9 градусов.0 градусов. Поставив ноги «высоко и широко», вы больше сфокусируете упражнение на ягодицах.
Колени должны оставаться слегка согнутыми. Избегайте блокировки коленей и держите давление на мышцы, а не на суставы. Это поможет предотвратить травмы. Сидячее положение также позволяет лучше осознавать тягу колена, удерживая колени за пределами среднего пальца ноги, чтобы предотвратить их складывание / выкатывание, поможет предотвратить ненужную нагрузку на коленный сустав.
7. Тренажер для разгибания ног
Если вы новичок в силовых тренировках, тренажер для разгибания ног — отличное место для начала, поскольку он имеет простую настройку. Это сидячее упражнение, при котором утяжеленная подушка ложится на верхнюю часть голеней, начиная с колен, согнутых под углом 90 градусов. Квадрицепсы сокращаются, чтобы разогнуть колено и поднять ноги. Основное преимущество тренажера для разгибания ног заключается в том, чтобы изолировать четырехглавую мышцу. Это можно сделать, работая обеими ногами одновременно или работая в одностороннем порядке, чтобы сбалансировать левую и правую стороны.
Это сидячее упражнение, при котором утяжеленная подушка ложится на верхнюю часть голеней, начиная с колен, согнутых под углом 90 градусов. Квадрицепсы сокращаются, чтобы разогнуть колено и поднять ноги. Основное преимущество тренажера для разгибания ног заключается в том, чтобы изолировать четырехглавую мышцу. Это можно сделать, работая обеими ногами одновременно или работая в одностороннем порядке, чтобы сбалансировать левую и правую стороны.
6. Гакк-приседания на тренажере
Гакк-приседания похожи на жим ногами. Хотя они нацелены на одни и те же группы мышц, каждый тренажер по-разному воздействует на атлета. В гакк-приседаниях спортсмен стоит под наплечниками у спинки на фиксированной платформе, обычно под углом 45 градусов. Пока вы приседаете, машина будет поддерживать угол.
Гакк-приседания — это золотая середина между приседаниями со штангой и жимом ногами. Вы получаете поддержку, которую обеспечивает машина, — аналогичную жиму ногами, — но вы можете нацеливаться на квадрицепсы, ягодицы, подколенное сухожилие и икры.
Еще одно сходство с тренажером для жима ногами: чередование положения стопы позволяет воздействовать на разные мышцы. Например, при более низком расположении стопы больше внимания уделяется квадрицепсам, ягодицам и икрам с меньшим упором на подколенные сухожилия.
5. Тренажер для сгибания ног
До сих пор мы рассмотрели МНОГО тренажеров для квадрицепсов (но если вам все еще нужно больше, вот несколько вариантов приседаний TRX). Давайте смешаем это и переключим наше внимание на подколенные сухожилия. Как и тренажер для разгибания ног, это отличное начальное упражнение, изолирующее нижнюю часть задней цепи, а именно ягодичные мышцы, подколенные сухожилия и икры.
Машина требует, чтобы вы ложились лицом вниз, а роликовая подушка располагалась чуть выше пяток. Чтобы выполнить сгибание ног, согните колени и подтяните пятки к ягодицам. Вы также можете увидеть сгибание ног в положении сидя, такое же простое и малоэффективное, как и его аналог в положении лежа. Как и в случае с разгибанием ног, у вас есть дополнительное преимущество двусторонней и односторонней тренировки для укрепления любого мышечного дисбаланса.
Как и в случае с разгибанием ног, у вас есть дополнительное преимущество двусторонней и односторонней тренировки для укрепления любого мышечного дисбаланса.
4. Устройство для отведения бедра
Отведение бедра — это отведение ноги от средней линии тела. Это делает машину для отведения бедра той, в которой подушечки расположены на внешней стороне бедер. Когда ноги выталкиваются наружу, задействуются отводящие мышцы бедра и большая ягодичная мышца.
Отводящие и приводящие мышцы (работающие для приведения ног к средней линии тела) стабилизируют колени и таз при ходьбе. Это означает, что вам не нужно будет использовать большой вес или нагрузку. Вместо этого сосредоточьтесь на укреплении этих мышц, чтобы поддерживать окружающие суставы, особенно если недостаток силы бедра вызывает боль в бедре или колене.
3. Машина Смита
Машина Смита отличается от обычной стойки для приседаний тем, что штанга фиксируется и скользит вверх и вниз с помощью системы кареток с предохранительными стопорами вдоль дорожки.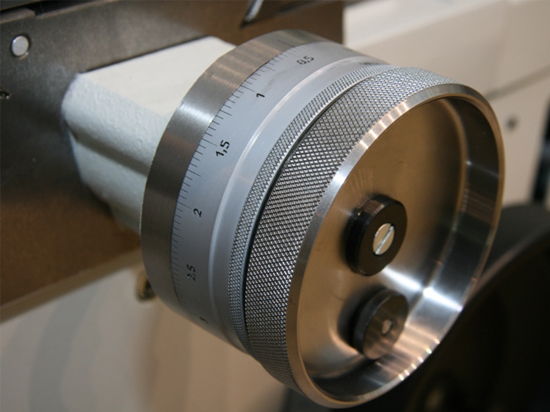 Повышение стабильности делает тренажер Смита популярным выбором для односторонних упражнений, таких как приседания и становая тяга на одной ноге.
Повышение стабильности делает тренажер Смита популярным выбором для односторонних упражнений, таких как приседания и становая тяга на одной ноге.
Тренажер Смита невероятно универсален, и хотя он не является тренажером для ног, вы можете использовать его в качестве универсального средства для тренировки ног на следующий день. Хотите тренировать квадрицепсы и ягодицы? Попробуйте приседания в машине Смита. Сосредоточение внимания на подколенных сухожилиях и ягодицах? Просто отрегулируйте стопоры для румынской становой тяги. Вы даже можете взять скамью и настроиться на толчки бедрами, выпады, подъемы на носки стоя — список можно продолжить.
2. Тренажер для икроножных мышц
Изоляция икр создает прочную основу для нижней части тела. Икра состоит из двух мышц: меньшей камбаловидной мышцы и большей икроножной мышцы. Вместе эти мышцы поддерживают остальную часть нижней конечности. Они могут поглощать силу, обеспечивать стабильность лодыжки и колена и генерировать силу для прыжков.
Обычно в тренажерном зале вы найдете тренажеры для подъема икр стоя и/или сидя. Эти машины могут быть с пластинчатой нагрузкой или на шкивной системе. Стоячая машина будет иметь подушечки, которые опираются на ваше плечо, а для сидячей машины подушечки будут располагаться чуть выше колена. Оба тренажера для ног имеют платформу, на которую можно поставить подушечки стопы с достаточной глубиной, чтобы опустить пятки. Если в вашем спортзале нет ни того, ни другого, не бойтесь! Вы также можете использовать машину Смита для подъема икр, используя устойчивую приподнятую платформу или изменив положение ног на машине для жима ногами. Еще одним преимуществом тренировки икр является улучшение гибкости и подвижности голеностопного сустава, что может помочь достичь большей глубины приседания.
1. Полустойка для приседаний
Полустойка невероятно универсальна и может использоваться для различных упражнений. Они занимают меньше места, чем полноценный стеллаж, состоящий из двух вертикальных стоек с регулируемыми перекладинами по бокам. Это позволяет вам установить высоту вашей штанги на желаемом уровне. Эти регулируемые стержни также действуют как корректировщик, обеспечивая отказоустойчивость, чтобы предотвратить удар стержня об пол, если вы не справитесь с подъемом.
Это позволяет вам установить высоту вашей штанги на желаемом уровне. Эти регулируемые стержни также действуют как корректировщик, обеспечивая отказоустойчивость, чтобы предотвратить удар стержня об пол, если вы не справитесь с подъемом.
Используя половинную стойку для приседаний, вы будете стабильнее в своем положении и будете в безопасности, если сбросите вес.
Советы по безопасности при тренировке ног
Как и при любом упражнении, важно в первую очередь думать о безопасности. Из-за стабильности, обеспечиваемой большинством машин, можно впасть в ложное чувство безопасности. Вот несколько советов, как получить максимальную отдачу от тренировки:
- Работа с личным тренером: Попробуйте разовое занятие, чтобы установить программу, или несколько регулярных занятий, чтобы сосредоточиться на коррекции формы и персонализированных модификациях механики вашего тела. Это поможет снизить риск получения травм и ускорить прогресс и результаты!
- Знай свою машину: Найдите время, чтобы ознакомиться с функциями безопасности используемой модели.
 Различные машины будут иметь разные настройки, и вы не хотите искать предохранительную ручку, когда не удается поднять.
Различные машины будут иметь разные настройки, и вы не хотите искать предохранительную ручку, когда не удается поднять.
 Различные машины будут иметь разные настройки, и вы не хотите искать предохранительную ручку, когда не удается поднять.
Различные машины будут иметь разные настройки, и вы не хотите искать предохранительную ручку, когда не удается поднять.Стартовый свет: Сосредоточьтесь на том, чтобы получить полную амплитуду движения, прежде чем возникнет искушение сложить вес.
Автономные функциональные движения в сухожилиях конечности с ограниченным опытом
Лоури, К., Колев, С., Дао, Дж., Раджесваран, А. и Тодоров, Э. Обучение с подкреплением для нехватательных манипуляций: переход от моделирования к физической системе. В проц. Международная конференция IEEE по моделированию, моделированию и программированию для автономных роботов (SIMPAR), 35–42, 2018 г. (IEEE, 2018 г.).
Andrychowicz, M. et al. Обучение ловким манипуляциям в руках. Препринт на https://arxiv.org/abs/1808.00177 (2018).
Кобаяши, Х. и Озава, Р. Адаптивное нейронное управление механизмами, управляемыми сухожилиями, с эластичными сухожилиями.
Automatica 39 , 1509–1519 (2003 г.).Артикул
MathSciNetGoogle Scholar
Нгуен-Туонг, Д., Петерс, Дж., Сигер, М. и Шёлкопф, Б. Обучение обратной динамике: сравнение. В проц. Европейский симпозиум по искусственным нейронным сетям 13–18 (2008 г.).
Оса, Т., Питерс, Дж. и Нойманн, Г. Иерархическое обучение с подкреплением множественных стратегий захвата с помощью инструкций человека. Доп. Робот. 32 , 955–968 (2018).
Артикул
Google Scholar
Манунпонг, П., Генг, Т., Кульвичус, Т., Порр, Б. и Вёргёттер, Ф. Адаптивный, быстрая ходьба двуногого робота под нейронным управлением и обучением. Вычисление PLoS. биол. 3 , е134 (2007).
Артикул
Google Scholar
Гийсбертс, А. и Метта, Г. Обучение модели в реальном времени с использованием инкрементной регрессии гауссовского процесса с разреженным спектром. Нейронная сеть. 41 , 59–69 (2013).
Артикул
Google Scholar
Делла Сантина, К., Лакатос, Д., Бикки, А. и Альбу-Шеффер, А. Использование нелинейных нормальных режимов для выполнения эффективных циклических движений в мягких роботах. Препринт на https://arxiv.org/abs/1806.08389(2018).
Бонгард Дж., Зыков В. и Липсон Х. Устойчивые машины посредством непрерывного самомоделирования. Наука 314 , 1118–1121 (2006).
Артикул
Google Scholar
Кришнан, С. и др. SWIRL: последовательный оконный алгоритм обучения с обратным подкреплением для задач роботов с отсроченным вознаграждением. Междунар. Дж. Роб. Рез . https://doi.org/10.1177/0278364918784350 (2018 г.).
Джеймс, С. и др. Sim-to-Real через Sim-to-Sim: эффективный роботизированный захват данных с помощью сетей адаптации, рандомизированных к каноническим. Препринт на https://arxiv.org/abs/1812.07252 (2018).
Такахаши К., Огата Т., Наканиши Дж., Ченг Г. и Сугано С. Динамическое обучение движению роботов с гибкими суставами с несколькими степенями свободы с использованием активно-пассивного моторного лепета посредством глубокого обучения. Доп. Робот. 31 , 1002–1015 (2017).
Артикул
Google Scholar
Гейтенбек, Т., Ван Де Панне, М. и Ван Дер Стаппен, А. Ф. Гибкое передвижение двуногих существ на основе мышц. ACM Trans. График 32 , 206 (2013).
Артикул
Google Scholar
Кумар В., Тасса Ю., Эрез Т. и Тодоров Э. Синтез поведения в реальном времени для динамических ручных манипуляций. В проц. Международная конференция IEEE по робототехнике и автоматизации (ICRA), 2014 г., 6808–6815 (IEEE, 2014 г.).
Кумар, В., Гупта, А., Тодоров, Э. и Левин, С. Изучение методов ловкого манипулирования на основе опыта и имитации. Препринт на https://arxiv.org/abs/1611.
05095 (2016).Ромбокас, Э., Теодору, Э., Малхотра, М., Тодоров, Э. и Мацуока, Ю. Управление биомеханическими и роботизированными системами, управляемое сухожилиями: подход к обучению с подкреплением на основе интегрирования путей. В Проц. Международная конференция IEEE по робототехнике и автоматизации (ICRA), 2012 г., 208–214 (IEEE, 2012 г.).
Потконяк, В., Светозаревич, Б., Йованович, К. и Холланд, О. Управление натяжителем-толкателем податливых и неподатливых антагонистических приводов сухожилий в роботизированных системах. Междунар. Дж. Адв. Робот. Сист. 8 , 69 (2011).
Артикул
Google Scholar
Хант А., Щецински Н. и Куинн Р. Разработка и обучение нейронного контроллера для ходьбы на задних лапах робота-собаки. Перед. Нейроробот. 11 , 18 (2017).
Артикул
Google Scholar
Расмуссен Д., Фолькер А. и Элиасмит С. Нейронная модель иерархического обучения с подкреплением. PLoS One 12 , e0180234 (2017).
Артикул
Google Scholar
Паризи, С., Рамстедт, С. и Питерс, Дж. Целенаправленное уменьшение размерности для обучения с подкреплением. В проц. Международная конференция IEEE/RSJ по интеллектуальным роботам и системам (IROS), 4634–4639, 2017 г. (IEEE, 2017 г.).
Д’Суза, А., Виджаякумар, С. и Шаал, С. Изучение обратной кинематики. Интел. Сист. роботов. 1 , 298–303 (2001).
Артикул
Google Scholar
Наджар, Т. и Хасегава, О. Самоорганизующаяся инкрементная нейронная сеть (SOINN) как механизм моторного лепета и сенсомоторного обучения в развивающей робототехнике. В Проц. Международная конференция по искусственным нейронным сетям 321–330 (Springer, 2013).
Marjaninejad, A., Annigeri, R. & Valero-Cuevas, FJ. Безмодельный контроль движения в конечности, управляемой сухожилиями, с помощью модифицированного генетического алгоритма. 40-я ежегодная международная конференция IEEE Engineering in Medicine and Biology Society (EMBC) (IEEE, 2018).
Rajeswaran, A. et al. Обучение сложным ловким манипуляциям с глубоким обучением с подкреплением и демонстрациями.
Препринт на https://arxiv.org/abs/1709.10087 (2017).Шульман, Дж., Левин, С., Аббил, П., Джордан, М. и Мориц, П. Оптимизация политик доверительного региона. In Международная конференция по машинному обучению 1889–1897 (PMLR, 2015).
Мних В. и др. Контроль на уровне человека посредством глубокого обучения с подкреплением. Природа 518 , 529–533 (2015).
Артикул
Google Scholar
Салиманс, Т., Хо, Дж., Чен, X., Сидор, С. и Суцкевер, И. Стратегии эволюции как масштабируемая альтернатива обучению с подкреплением. Препринт на https://arxiv.org/abs/1703.03864 (2017).
Vinyals, O. et al. Starcraft II: новый вызов для обучения с подкреплением. Препринт на https://arxiv.org/abs/1708.04782 (2017).
Метта, Г. и др. Гуманоидный робот iCub: платформа открытых систем для исследований в области когнитивного развития.
Нейронная сеть. 23 , 1125–1134 (2010).Артикул
Google Scholar
Патхак, Д., Агравал, П., Эфрос, А. А. и Даррелл, Т. Исследование, движимое любопытством, с помощью предсказания с самоконтролем.0113 Международная конференция по машинному обучению (ICML) 2017 , (2017).
Луо, К. и др. Разработка биомиметической системы управления сухожильным протезом руки. В 2018 г. Международная конференция IEEE по киборгам и бионическим системам (CBS) 528–531 (2018 г.).
Рави С. и Ларошель Х. Оптимизация как модель обучения за несколько шагов. В проц. ICLR (2016).
Шаал, С. в Гуманоидная робототехника: справочник . (под редакцией Госвами, А. и Вадаккепат, П.) 1–9 (Springer, Дордрехт, 2018 г.).
Bohg, J. et al. Интерактивное восприятие: использование действия в восприятии и восприятия в действии.
IEEE Trans. Робот. 33 , 1273–1291 (2017).Артикул
Google Scholar
Ingram, T.G.J., Solomon, J.P., Westwood, D.A. & Boe, S.G. Сенсорная обратная связь, связанная с движением, не является необходимой для обучения выполнению двигательных навыков. Поведение. Мозг Res. 359 , 135–142 (2019).
Артикул
Google Scholar
Fine, M.S. & Thoroughman, K.A. Преобразование ошибки в сенсомоторную адаптацию в зависимости от динамики окружающей среды. J. Нейрофизиол. 98 , 1392–1404 (2007).
Артикул
Google Scholar
Адольф, К. Э. и др. Как научиться ходить? Тысячи шагов и десятки падений в день. Псих. науч. 23 , 1387–1394 (2012).
Артикул
Google Scholar
Marjaninejad, A. & Valero-Cuevas, FJ в Biomechanics of Anthropomorphic Systems (eds Venture, G., Laumond, J.-P. & Watier, B.) 7–34 (Springer, New York, Нью-Йорк, 2019).
МакЭндрю, П. М., Уилкен, Дж. М. и Дингвелл, Дж. Б. Динамическая стабильность ходьбы человека в визуально и механически дестабилизирующих средах. Дж. Биомех. 44 , 644–649 (2011).
Артикул
Google Scholar
Джалаледдини, К. и др. Нейроморфное встречается с нейромеханикой. Часть II: Роль фузимоторного привода. J. Нейронная инженерия. 14 , 025002 (2017).
Артикул
Google Scholar
Леб, Г. Э. Оптимальное недостаточно. биол. киберн. 106 , 757–765 (2012).
Артикул
Google Scholar
Коллинз С. Х., Виггин М. Б. и Савицки Г. С. Снижение затрат энергии на ходьбу человека с помощью экзоскелета без двигателя. Природа 522 , 212–215 (2015).
Артикул
Google Scholar
Кобаяси Т., Секияма К., Хасэгава Ю., Аояма Т. и Фукуда Т. Единая двуногая походка для автономного перехода между ходьбой и бегом с целью минимизации энергии. Роб. Автон. Сист. 103 , 27–41 (2018).
Артикул
Google Scholar
Финли, Дж. М. и Бастиан, А. Дж. Связь между асимметрией положения стопы и метаболическими затратами на транспортировку при гемипаретической походке. Нейрореабилитация. Ремонт нейронов 31 , 168–177 (2017).
Артикул
Google Scholar
Чжан, В., Гордон, А. М., Фу, К. и Сантелло, М. Манипуляции после вращения объекта выявляют независимые сенсомоторные представления памяти о положениях и силах пальцев. J. Нейрофизиол. 103 , 2953–2964 (2010).
Google Scholar
Вулперт, Д. М. и Фланаган, Дж. Р. Вычисления, лежащие в основе сенсомоторного обучения. Курс. мнение Нейробиол. 37 , 7–11 (2016).
Артикул
Google Scholar
Тодоров Э. Принципы оптимальности в сенсомоторном управлении. Нац. Неврологи. 7 , 907–915 (2004).
 Automatica 39 , 1509–1519 (2003 г.).
Automatica 39 , 1509–1519 (2003 г.). «>
«>Маркес Х.Г., Бхарадвадж А. и Иида Ф. От спонтанной двигательной активности к скоординированному поведению: модель развития. Вычисл. PLoS. биол. 10 , e1003653 (2014).
Артикул
Google Scholar

 «>
«>Марко, А., Хенниг, П., Бог, Дж., Шааль, С. и Тримпе, С. Автоматическая настройка LQR на основе глобальной оптимизации гауссовского процесса. В 2016 г. Международная конференция IEEE по робототехнике и автоматизации (ICRA) 270–277 (IEEE, 2016).
 05095 (2016).
05095 (2016). «>
«>Фазели, Н. и др. Видеть, чувствовать, действовать: иерархическое обучение навыкам сложной манипуляции с мультисенсорным слиянием. Науч. Робот. 4 , eaav3123 (2019).
Артикул
Google Scholar
 «>
«>Бонарини, А., Лазарик, А. и Рестелли, М. Приобретение дополнительных навыков для мотивированных обучающихся животных. В проц. Международная конференция по моделированию адаптивного поведения 357–368 (Springer, 2006).
 Препринт на https://arxiv.org/abs/1709.10087 (2017).
Препринт на https://arxiv.org/abs/1709.10087 (2017). Нейронная сеть. 23 , 1125–1134 (2010).
Нейронная сеть. 23 , 1125–1134 (2010). IEEE Trans. Робот. 33 , 1273–1291 (2017).
IEEE Trans. Робот. 33 , 1273–1291 (2017). «>
«>Валеро-Куэвас, Ф. Дж. Основы нейромеханики 8 (Springer, New York, NY, 2015).
 «>
«>Селинджер Дж. К., О’Коннор С. М., Вонг Дж. Д. и Донелан Дж. М. Люди могут постоянно оптимизировать затраты энергии во время ходьбы. Курс. биол. 25 , 2452–2456 (2015).
Артикул
Google Scholar
