Содержание
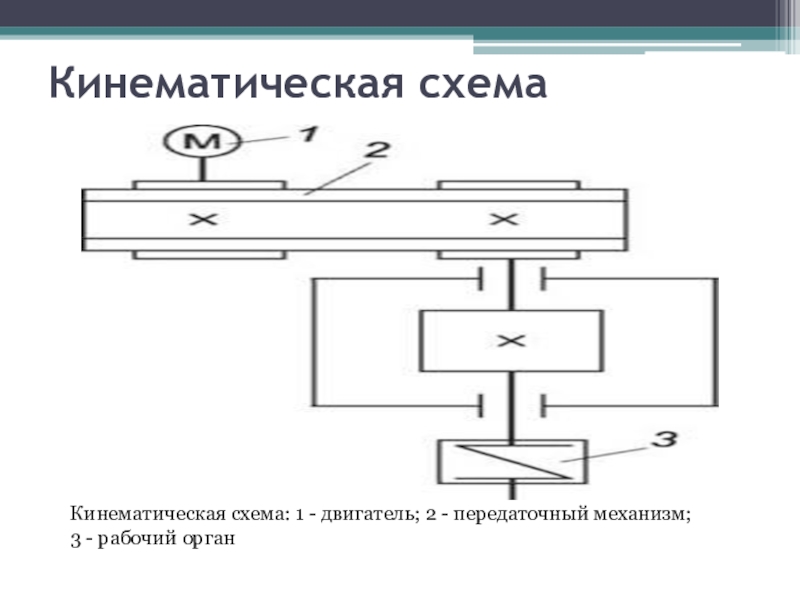
1. Кинематическая схема привода
| Исходные Тяговая Скорость Шаг Число Срок |
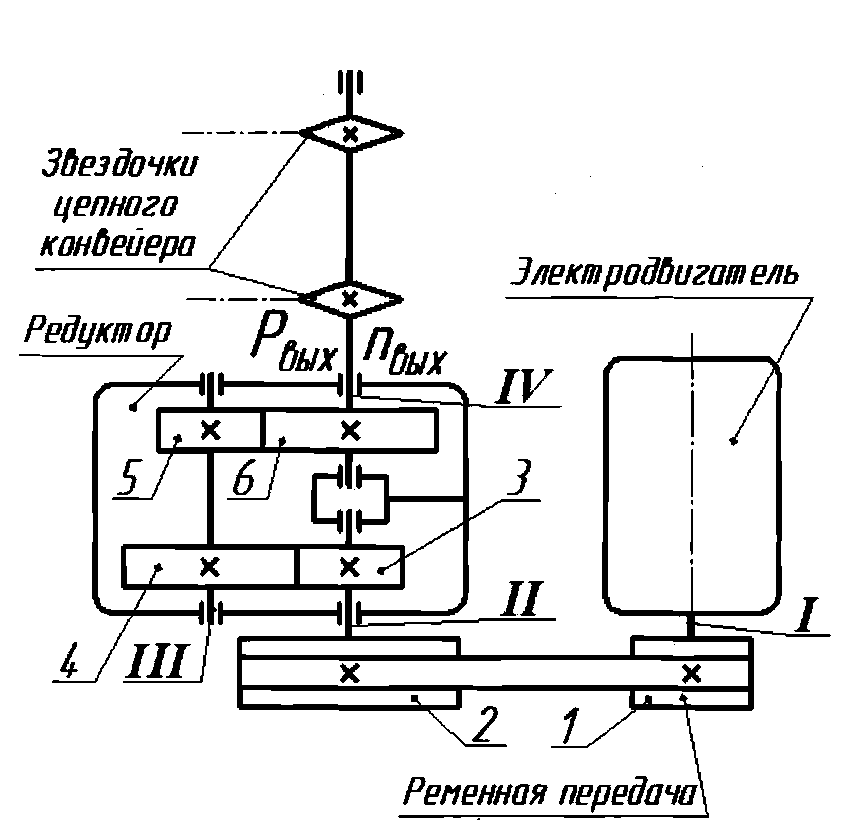
Валы: В1 — двигателя, В2 — быстроходный В3. тихоходный редуктора, В4 — рабочей | |
2.
 Выбор электродвигателя. Кинематический и силовой расчет привода
Выбор электродвигателя. Кинематический и силовой расчет привода
2.1. Определение номинальной мощности и номинальной частоты вращения двигателя
Мощность
двигателя зависит от требуемой мощности
рабочей машины, а его частота вращения
– от частоты вращения приводного вала
рабочей машины.
Исходные данные:
— тяговая сила цепи конвейера,
— скорость цепи конвейера.
Определяем
требуемую мощность конвейера:
Определяем
КПД привода:
где
— КПД закрытой передачи (цилиндрический
редуктор),
— КПД открытой передачи (клиноременная
передача),
— КПД муфты,
— КПД подшипников качения (по кинематической
схеме в редукторе две пары подшипников),
— КПД подшипников скольжения (по схеме
на приводном валу конвейера одна пара
подшипников).
Находим
требуемую мощность двигателя:
.
Из
условия потаблице
диапазонов мощностей трехфазных
асинхронных двигателей серии 4А (А.Е.
Шейнблит «Курсовое проектирование
деталей машин», таблица 2.1, стр.41) выбираем
ближайшее к требуемой мощности двигателя
значение номинальной мощности.
По значению
номинальной мощности
выбираем четыре варианта типа двигателя
серии А4:
Вариант
Тип двигателя
Номинальная
мощностьЧастота
вращения, об/минсинхронная
При номинальном
режиме1
4АМ112МАУ3
2,2
750
700
2
4АМ100L6У3
2,2
1000
950
3
4АМ90L4У3
2,2
1500
1425
4
4АМ80В2У3
2,2
3000
2850
2.
 2. Определение передаточного числа привода
2. Определение передаточного числа привода
Исходные
данные:
— скорость тяговой цепи конвейера,
— число зубьев звездочки,
— шаг тяговой цепи.
Определяем
частоту вращения приводного вала
конвейера:
— диаметр барабана,
.
Находим
передаточное число привода для каждого
варианта:
,
,,,.
Передаточное
число привода
.
Рекомендуемые
значения передаточных чисел для открытой
ременной и закрытой цилиндрической
зубчатой передач соответственно:
,.
Следовательно,
передаточное число привода
.
В этот
промежуток попадают передаточные числа
для первого и второго вариантов двигателя.
Из двух вариантов выбираем второй (,),
так как первый вариант (;)
не рекомендуется для приводов общего
назначения.
Выбрали
двигатель 4АМ100L6У3
Производим
разбивку передаточного числа привода:
,
2.3. Кинематический и силовой расчет привода
Индексом Б
обозначены параметры быстроходного
вала, Т – тихоходного, дв – двигателя,
вых – конвейера.
Кинематические
характеристики:
Частоты
вращения:
,
,
,
.
Угловые
скорости:
,
,
,
.
Силовые
характеристики:
Мощности:
,
,
,
.
Вращающие
моменты:
,
,
,
.
Тип ; | |||||||
Параметр | Передача | Параметр | Вал | ||||
закрытая | открытая | двигателя | редуктора | тяговой | |||
быстроходный | тихоходный | ||||||
Передаточное | 5,0 | 3,68 | Расчетная | 1,69 | 1,64 | 1,59 | 1,54 |
Угловая | 99,48 | 27,03 | 5,41 | 5,41 | |||
КПД | 0,97 | 0,97 | Частота | 950 | 258,15 | 51,63 | 51,63 |
Вращающий | 16,98 | 60,91 | 293,96 | 285,2 | |||
Кинематический расчет привода — практическая работа
ПРАКТИЧЕСКАЯ РАБОТА № 1 КИНЕМАТИЧЕСКИЙ РАСЧЕТ ПРИВОДА
Цель работы:
1. Изучить последовательность выполнения кинематического расчета привода.
Изучить последовательность выполнения кинематического расчета привода.
2. Ознакомиться с примером кинематического расчета привода.
3. Выполнить кинематический расчет привода для индивидуального задания.
Порядок выполнения кинематического расчета привода. Проектирование машины любого типа начинается с расчета привода, который начинают с выбора двигателя по потребной мощности, кинематической схеме привода и условиям эксплуатации, указанным в задании на разработку машины. Требуемую мощность двигателя определяют на основании исходных данных – рабочих характеристик машины.
Если указана мощность () на выходном валу привода, то расчетная мощность на входном валу привода определяется по зависимости:
, (1)
где — коэффициент полезного действия (КПД) привода, который равный произведению частных КПД элементов привода
, (2)
где — КПД отдельных звеньев кинематической цепи привода, ориентировочные значения, которых приведены в таблице 1. 1.
1.
С учетом расчетной мощности на входном валу привода определяется мощность двигателя привода из условия .
Если на выходном валу указаны вращающий момент () и его угловая скорость (), то мощность привода
. (3)
Если на выходном валу указаны тяговое усилие ()и его скорость (), то мощность на входном валу привода
. (4)
Таблица 1.1. Средние значения коэффициентов полезного действия элементов привода
|
Элемент привода
|
|
Элемент привода
|
|
|
Закрытая зубчатая:
с цилиндрическими колесами
с коническими колесами
Открытая зубчатая:
с цилиндрическими колесами
с коническими колесами
Закрытая червячная при числе
заходов червяка
|
0,97…0,98
0,96…0,97
0,92…0,94
0,91…0,93
0,70…0,75
0,80…0,85
0,90…0,95
|
Цепная:
закрытая
открытая
Ременная передача:
с плоским ремнем
с клиновым и зубчатым
Подшипники:
качения (одна пара)
скольжения (одна пара)
Муфта компенсирующая
|
0,95…0,97
0,90…0,95
0,96…0,98
0,95…0,97
0,99…0,995
0,99…0,995
0,985…0,995
|
В большинстве стационарных машин в качестве двигателя принимается трехфазный асинхронный электродвигатель, характерной особенностью которого является синхронная частота вращения, которая в зависимости от числа пар полюсов может быть 3000;1500;1000;750;600; 500 об/мин. Для обеспечения заданной скорости на выходном валу привода его передаточное отношение
Для обеспечения заданной скорости на выходном валу привода его передаточное отношение
(5)
Передаточное отношение привода равно произведению передаточных отношений всех передач привода:
, (6)
где — передаточное отношение отдельных передач кинематической цепи привода.
Передаточные отношения для различных видов механических передач приведены в таблице 1.2.
Таблица 1.2. Средние значения передаточных отношений механических передач
|
Передача
|
Передаточное отношение
|
|
Зубчатая:
с цилиндрическими колесами
с коническими колесами
Червячная:
с однозаходным червяком
с двухзаходным червяком
с четырехзаходным червяком
Цепная
Ременная
|
3…6
2…5
28…80
14…40
7…20
3…6
2…4
|
При кинематическом расчете привода принята нумерация валов начиная от вала приводного двигателя. Для каждого вала определяется мощность, момент и его угловая скорость (частота вращения) с учетом КПД передач и их передаточного отношения.
Для каждого вала определяется мощность, момент и его угловая скорость (частота вращения) с учетом КПД передач и их передаточного отношения.
Мощность на том валу привода
. (7)
Угловая скорость на том валу привода
. (8)
Момент том валу привода
. (9)
2. Пример расчета. Определить мощность привода ленточного транспортера, представленного на рис. 1.1. Рассчитать мощность, момент и угловую скорость на каждом валу привода.
Исходные данные. Тяговое усилие на ленте 10 кН, скорость движения ленты . 1 м/с. Электродвигатель с синхронной частотой вращения 1500 об/мин. Диаметр приводного барабана транспортера 800 мм. Передаточные отношения ременной, зубчатой и цепной передач: 3,45; 5,6;3,25.
Рис.1.1. Кинематическая схема привода: 1 – двигатель, 2 – клиноременная передача, 3 – закрытая зубчатая передача, 4 – цепная передача, 5 – барабан ленточного конвейера.
РЕШЕНИЕ
1. Принимаем КПД элементов привода по таблице 1. 1:
1:
0,97 — КПД ременной передачи,
0,97 – КПД зубчатой передачи,
0,92 – КПД цепной передачи,
0,99 –КПД пары опорных подшипников.
2. Общий КПД привода по формуле (2):
0,84.
3. Частота вращения приводного барабана:
23,9 об/мин.
4. Передаточное отношение привода по формуле (5):
62,8.
Проверка передаточного отношения для заданных передаточных отношений передач по формуле (6)
62,8.
5. Расчетная мощность на валу двигателя привода определяется по формуле (1)
11900 Вт = 11,9 кВт.
6. Угловые скорости, мощности и крутящие моменты на валах привода:
I вал – вал двигателя:
157 1/с,
кВт,
.
II вал – входной вал редуктора:
45,5 1/с,
11,4 кВт,
III вал – выходной вал редуктора:
8,1 1/с,
10,9 кВт,
IV вал – вал барабана:
2,5 1/с,
10 кВт,
.
Проверка тягового усилия на ленте конвейера:
н = 10 кН.
3. Индивидуальные задания для выполнения кинематического расчета привода.
Индивидуальные задания по практической работе выполняются для кинематической схемы, представленной на рис.1.1. с исходными данными приведенными в таблицах 1.3,1.4.
Необходимо определить мощность привода ленточного транспортера, представленного на рис. 1.1. Рассчитать мощность, момент и угловую скорость на каждом валу привода.
Таблица 1.3. Исходные данные для кинематической схемы рис.1.1.
|
№
варианта
|
Мощность на выходном валу привода, кВт
|
Синхронная частота вращения двигателя, об/мин
|
Частота вращения вала барабана, об/мин
|
Передаточное отношение передачи
| |
|
ременной
|
зубчатой
| ||||
|
1
|
4
|
3000
|
90
|
2,8
|
6,3
|
|
2
|
7,5
|
3000
|
100
|
2,5
|
5,6
|
|
3
|
12
|
3000
|
110
|
2,0
|
6,3
|
|
4
|
15
|
3000
|
120
|
1,8
|
5,6
|
|
5
|
18
|
3000
|
150
|
2,0
|
5,0
|
|
6
|
4
|
3000
|
80
|
2,24
|
4,0
|
|
7
|
7,5
|
3000
|
90
|
3,15
|
6,3
|
|
8
|
12
|
3000
|
100
|
2,8
|
5,6
|
|
9
|
15
|
3000
|
110
|
2,5
|
5,0
|
|
10
|
18
|
3000
|
120
|
3,15
|
4,5
|
|
11
|
4
|
1500
|
150
|
2,24
|
5,0
|
|
12
|
7,5
|
1500
|
80
|
2,0
|
4,0
|
|
13
|
12
|
1500
|
90
|
3,15
|
3,15
|
|
14
|
15
|
1500
|
100
|
1,4
|
2,8
|
|
15
|
18
|
1500
|
110
|
1,6
|
3,15
|
|
16
|
4
|
1500
|
120
|
2,8
|
2,8
|
|
17
|
7,5
|
1500
|
150
|
2,5
|
2,5
|
|
18
|
12
|
1500
|
80
|
2,0
|
2,0
|
|
19
|
15
|
1500
|
90
|
3,55
|
3,15
|
|
20
|
18
|
1500
|
100
|
3,15
|
3,55
|
|
21
|
4
|
1000
|
110
|
2,8
|
2,8
|
|
22
|
7,5
|
1000
|
120
|
2,24
|
2,24
|
|
23
|
12
|
1000
|
70
|
2,5
|
2,5
|
|
24
|
15
|
1000
|
60
|
1,6
|
2,0
|
|
25
|
18
|
1000
|
50
|
2,0
|
3,15
|
|
26
|
4
|
1000
|
80
|
3,55
|
3,55
|
|
27
|
7,5
|
1000
|
75
|
2,8
|
2,8
|
|
28
|
12
|
1000
|
65
|
2,24
|
2,24
|
|
29
|
15
|
1000
|
55
|
3,15
|
3,15
|
|
30
|
18
|
1000
|
70
|
1,6
|
2,24
|
|
31
|
12
|
750
|
60
|
2,5
|
1,8
|
|
32
|
15
|
750
|
50
|
2,0
|
2,0
|
ПРИМЕЧАНИЕ.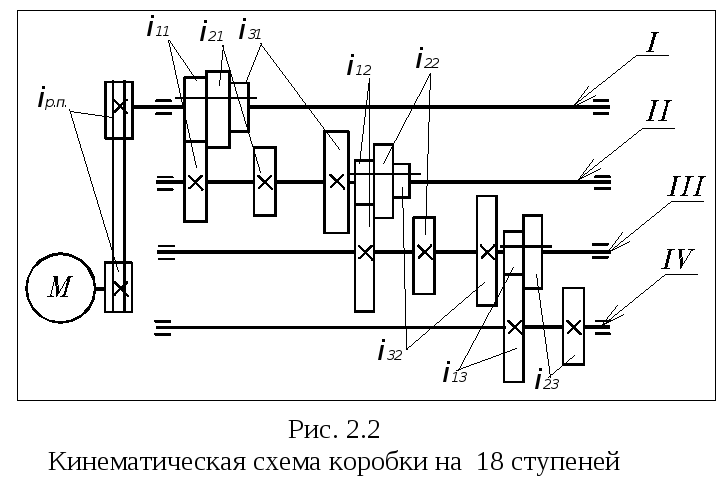 При кинематическом расчете необходимо из общего передаточного отношения по заданным значениям определить передаточное отношение для цепной передачи.
При кинематическом расчете необходимо из общего передаточного отношения по заданным значениям определить передаточное отношение для цепной передачи.
Таблица 1.4. Исходные данные для кинематической схемы рис.1.1.
|
№
варианта
|
Мощность на выходном валу привода, кВт
|
Синхронная частота вращения двигателя, об/мин
|
Частота вращения вала барабана, об/мин
|
Передаточное отношение передачи
| |
|
ременной
|
зубчатой
| ||||
|
1
|
4
|
3000
|
110
|
4,0
|
5,6
|
|
2
|
7,5
|
3000
|
120
|
4,0
|
5,0
|
|
3
|
12
|
3000
|
130
|
3,6
|
5,6
|
|
4
|
15
|
3000
|
140
|
3,6
|
5,0
|
|
5
|
18
|
3000
|
170
|
2,5
|
4,0
|
|
6
|
4
|
3000
|
100
|
2,5
|
4,5
|
|
7
|
7,5
|
3000
|
110
|
4,1
|
6,3
|
|
8
|
12
|
3000
|
120
|
4,1
|
5,6
|
|
9
|
15
|
3000
|
130
|
3,7
|
5,0
|
|
10
|
18
|
3000
|
140
|
3,7
|
6,3
|
|
11
|
4
|
1500
|
130
|
2,5
|
4,5
|
|
12
|
7,5
|
1500
|
60
|
2,5
|
4,0
|
|
13
|
12
|
1500
|
70
|
2,0
|
3,15
|
|
14
|
15
|
1500
|
80
|
2,1
|
2,8
|
|
15
|
18
|
1500
|
90
|
1,9
|
3,15
|
|
16
|
4
|
1500
|
100
|
3,6
|
5,6
|
|
17
|
7,5
|
1500
|
130
|
2,5
|
2,5
|
|
18
|
12
|
1500
|
60
|
2,5
|
2,0
|
|
19
|
15
|
1500
|
70
|
2,1
|
3,55
|
|
20
|
18
|
1500
|
80
|
2,1
|
3,15
|
|
21
|
4
|
1000
|
90
|
3,7
|
2,8
|
|
22
|
7,5
|
1000
|
100
|
2,3
|
2,24
|
|
23
|
12
|
1000
|
50
|
2,5
|
2,5
|
|
24
|
15
|
1000
|
40
|
2,5
|
2,0
|
|
25
|
18
|
1000
|
30
|
2,1
|
4,0
|
|
26
|
4
|
1000
|
60
|
2,1
|
3,55
|
|
27
|
7,5
|
1000
|
55
|
3,7
|
2,8
|
|
28
|
12
|
1000
|
45
|
2,3
|
2,24
|
|
29
|
15
|
1000
|
35
|
1,9
|
3,15
|
|
30
|
18
|
1000
|
50
|
3,6
|
2,6
|
|
31
|
12
|
750
|
30
|
2,5
|
2,5
|
|
32
|
15
|
750
|
20
|
2,5
|
2,0
|
ПРИМЕЧАНИЕ. При кинематическом расчете необходимо из общего передаточного отношения по заданным значениям определить передаточное отношение для цепной передачи.
При кинематическом расчете необходимо из общего передаточного отношения по заданным значениям определить передаточное отношение для цепной передачи.
Кинематический расчет привода — практическая работа — 2.6 out of
5
based on
24 votes
Учебные материалы
Для преподавателей
Работы студентов
Справочная и техническая литература
Статьи по темам
- Механизмы и технологи
- Практические работы
- Кинематический расчет привода — практическая работа
Планетарный | Modul Biala — редукторы, мотор-редукторы, сцепления, запчасти Продукты
Планетарные | Modul Biala — редукторы, мотор-редукторы, сцепления, запчасти
| |||||||||||||||||||||||||||||||||
 ОБЩИЕ СВЕДЕНИЯ О ПЛАНЕТАРНЫХ МОТОР-РЕДУКТОРАХ И ОБЪЯСНЕНИЕ КАК ИСПОЛЬЗОВАТЬ ИХ ПОИСКОВЫЕ ДАННЫЕ
ОБЩИЕ СВЕДЕНИЯ О ПЛАНЕТАРНЫХ МОТОР-РЕДУКТОРАХ И ОБЪЯСНЕНИЕ КАК ИСПОЛЬЗОВАТЬ ИХ ПОИСКОВЫЕ ДАННЫЕ 

 pdf
pdf  pdf
pdf МЕНЮ
Главная
О нас
Продукция
Услуги
Оборудование
Сертификаты
Контакты
КОНТАКТЫ
7100 Бяла, Болгарияул. Колио Фичето, 15
Главный бухгалтер: 0817/ 73 027
Продажа: 0817/ 72 465
Факс: 0817/ 72 758
Е-mail: [email protected]
2023, Все права защищены. политика конфиденциальности
Электродвигатель: физика, эффективность и типы
Большинство из нас будет использовать электродвигатели каждый день; питание электрической зубной щетки по утрам, вращение вентиляторов для охлаждения компьютера или запуск двигателя в автомобиле. Эти устройства преобразуют электрическую энергию в механическую и делают это с помощью всего одной движущейся части! В этой статье объясняются основные принципы работы электродвигателя, его компоненты, а также некоторые распространенные типы и области применения электродвигателей.
Эти устройства преобразуют электрическую энергию в механическую и делают это с помощью всего одной движущейся части! В этой статье объясняются основные принципы работы электродвигателя, его компоненты, а также некоторые распространенные типы и области применения электродвигателей.
Электродвигатель Определение
Электродвигатель — это электромеханическое устройство, которое преобразует входную электрическую энергию в выходную механическую энергию. В двигателях постоянного тока это достигается в основном за счет взаимодействия стационарного магнитного статора и электромагнитного ротора, создающего силу, это известно как моторный эффект.
Провод, по которому течет ток, создает магнитное поле вокруг провода. Когда это электромагнитное поле взаимодействует с другим магнитным полем, создаваемым постоянным магнитом или электромагнитом, на провод действует сила.
Величина силы зависит от напряженности постоянного магнитного поля, длины провода, проходящего через поле, и величины тока, определяемой уравнением моторного эффекта. Двигательный эффект наиболее силен, когда провод / ток и магнитное поле находятся под углом 90 ° друг к другу, при этом сила эффекта уменьшается до нуля, если провод и магнитное поле параллельны.
Двигательный эффект наиболее силен, когда провод / ток и магнитное поле находятся под углом 90 ° друг к другу, при этом сила эффекта уменьшается до нуля, если провод и магнитное поле параллельны.
(слева) Схема моторного эффекта, показывающая взаимодействие провода с током с магнитным полем, создающим силу на проводе. (справа) Левосторонний инструмент Флеминга — способ определения направления силы на проволоке. Изучайте умные оригиналы.
F=B×I×L
F – сила в ньютонах (Н)
B – плотность магнитного потока в тесла (Тл)
I – сила тока в амперах (А)
Li – длина проводника в метрах( m)
Правило левой руки Флеминга
Правило левой руки Флеминга — это простой инструмент, с помощью которого можно легко определить направление силы, действующей на проводник с током в магнитном поле. Используя левую руку, держите большой, указательный и средний пальцы под прямым углом друг к другу, как показано выше. Затем укажите указательным пальцем в направлении магнитного поля (с севера на юг), а средним пальцем в направлении тока (+ к -). Затем ваш большой палец указывает в направлении результирующей силы на проводе!
Затем ваш большой палец указывает в направлении результирующей силы на проводе!
Типы электродвигателей
Существует бесчисленное множество вариантов конструкции электродвигателя для различных применений, но они делятся на две основные категории: двигатели переменного тока (AC) и двигатели постоянного тока (DC).
Двигатели постоянного тока
Простейшая форма двигателя постоянного тока состоит из стационарного магнитного поля и проводящей катушки, соединенной с коммутатором с разъемным кольцом, который подключается к источнику питания постоянного тока через щетки. На приведенной ниже диаграмме показан двигатель этого типа в исходном положении.
Схема, показывающая компоненты очень простого двигателя постоянного тока и то, как они создают вращательную силу вокруг оси двигателя. Росс Макдональд, StudySmarter Originals.
Теперь давайте пошагово рассмотрим, как работает двигатель постоянного тока:
Когда на щетки подается напряжение, коммутатор с разъемным кольцом передает это напряжение на катушку, которая создает ток в катушке.
 Катушка с током находится в магнитном поле, поэтому эффект двигателя создает противоположную силу на каждой стороне катушки, поскольку ток течет в противоположных направлениях. Это создает вращающую силу на катушке, и в этом примере двигатель начинает вращаться против часовой стрелки.
Катушка с током находится в магнитном поле, поэтому эффект двигателя создает противоположную силу на каждой стороне катушки, поскольку ток течет в противоположных направлениях. Это создает вращающую силу на катушке, и в этом примере двигатель начинает вращаться против часовой стрелки.После поворота на 90 градусов от исходного положения коммутатор с разъемным кольцом меняет направление тока на обратное. Это приводит к тому, что сторона катушки в верхней части вращения теперь испытывает силу, направленную вниз, а сторона катушки в нижней части двигателя испытывает силу, направленную вверх. В сочетании с импульсом от начального вращения это продолжает ускорять катушку при вращении против часовой стрелки.
После поворота еще на 180° коммутатор с разъемным кольцом снова меняет направление тока и направление сил, действующих на катушку. Это ускоряет катушку на следующем полуобороте, и эта последовательность продолжается, пока двигатель вращается.
 Катушка с током находится в магнитном поле, поэтому эффект двигателя создает противоположную силу на каждой стороне катушки, поскольку ток течет в противоположных направлениях. Это создает вращающую силу на катушке, и в этом примере двигатель начинает вращаться против часовой стрелки.
Катушка с током находится в магнитном поле, поэтому эффект двигателя создает противоположную силу на каждой стороне катушки, поскольку ток течет в противоположных направлениях. Это создает вращающую силу на катушке, и в этом примере двигатель начинает вращаться против часовой стрелки. Коммутатор с разъемным кольцом используется для надежного переключения направления тока в катушке с той же скоростью, что и двигатель. Как видно на схеме выше, коммутатор с разъемным кольцом состоит из двух полуцилиндрических проводников, прикрепленных к каждому концу катушки двигателя. Щетки проводят ток от источника питания на две половины разъемного коммутатора.
Как видно на схеме выше, коммутатор с разъемным кольцом состоит из двух полуцилиндрических проводников, прикрепленных к каждому концу катушки двигателя. Щетки проводят ток от источника питания на две половины разъемного коммутатора.
Когда двигатель вращается, коллектор с разрезным кольцом вращается вместе с ним. Поскольку щетки остаются неподвижными, это приводит к тому, что каждая сторона коллектора с разрезным кольцом контактирует с положительной щеткой на один полуоборот, а с отрицательной щеткой на другой полуоборот. Это приводит к тому, что полярность напряжения, подаваемого со щеток на катушку, меняется каждые пол-оборота, а также меняет направление тока.
Поскольку щетки и коллектор с разрезным кольцом работают при помощи физического скользящего контакта, часто это первая часть двигателя постоянного тока, которую необходимо заменить по мере износа щеток.
Существует три основных подхода к увеличению мощности двигателя постоянного тока:
Увеличение силы магнитного поля.
Это увеличивает член В в уравнении моторного эффекта, создавая большую силу на катушке.Добавление дополнительных витков (петлей) в катушку. Это увеличивает общую длину катушки, увеличивая Lчлен в уравнении двигательного эффекта и создавая большую силу.
Использование более высокого тока в катушке. Это увеличивает член в уравнении двигательного эффекта, создавая большую силу.
 Это увеличивает член В в уравнении моторного эффекта, создавая большую силу на катушке.
Это увеличивает член В в уравнении моторного эффекта, создавая большую силу на катушке.Производительность также можно улучшить, добавив железный сердечник к ротору электромагнита, как показано на более типичном двигателе постоянного тока ниже.
Схема типичного двигателя постоянного тока, показывающая катушку ротора с множеством контуров и железным сердечником для повышения производительности. Википедия.
Более совершенный тип двигателя постоянного тока — бесщеточный двигатель. Как следует из названия, основное отличие этого типа двигателя заключается в том, что он не имеет коллектора с разрезным кольцом или щеточных компонентов. Вместо этого полярность напряжения питания постоянного тока изменяется в цифровом виде с помощью полупроводникового контроллера. Преимущество этого заключается в повышенной надежности, поскольку щетки в щеточных двигателях часто изнашиваются и требуют замены, а также в целом обеспечивает лучшую производительность.
Вместо этого полярность напряжения питания постоянного тока изменяется в цифровом виде с помощью полупроводникового контроллера. Преимущество этого заключается в повышенной надежности, поскольку щетки в щеточных двигателях часто изнашиваются и требуют замены, а также в целом обеспечивает лучшую производительность.
Двигатели переменного тока
Двигатели переменного тока работают по тому же принципу, что и двигатели постоянного тока, но с некоторыми ключевыми отличиями. Как правило, обмотки катушки образуют статор (неподвижную часть) двигателя, а ротор представляет собой постоянный магнит или электромагнит.
В источнике питания переменного тока напряжение меняется синусоидально от положительного к отрицательному, как показано ниже. Когда переменное напряжение подается на обмотки катушки статора электромагнита, переменное напряжение создает переменное магнитное поле. В двигателе переменного тока это переменное магнитное поле используется для создания вращающей силы на роторе и вращения двигателя. Коммутатор с разъемным кольцом больше не нужен, так как направление тока меняется на противоположное при подаче переменного тока.
Коммутатор с разъемным кольцом больше не нужен, так как направление тока меняется на противоположное при подаче переменного тока.
(Вверху) — Синусоидальное изменение напряжения в сети переменного тока. (Внизу) — Соответствующая сила и направление магнитного поля, создаваемого электромагнитом с приложенным переменным напряжением. Росс Макдональд, StudySmarter Originals
Функции электродвигателей
Электродвигатели используются в бесчисленных устройствах, с которыми мы взаимодействуем каждый день. В бытовых устройствах обычно используется двигатель постоянного тока, если они питаются от батареи, и двигатель переменного тока, если они питаются от сети. Это делается для того, чтобы избежать преобразования источника питания с переменного тока на постоянный или наоборот, что снизит эффективность и увеличит стоимость из-за необходимых дополнительных компонентов. Ниже вы можете увидеть применение двигателей постоянного и переменного тока в повседневном использовании. 9
0315
Бытовые электродвигатели переменного тока :
- Вытяжка
- Кухонный миксер
- Пылесос
- Стиральная машина
- Микроволновая печь
Расчет мощности электродвигателя
При расчете мощности электродвигателя необходимо учитывать две переменные: выходную мощность и входную мощность.
Выходная мощность электродвигателя
Поскольку мощность равна энергии в секунду, мы можем рассчитать выходную механическую мощность двигателя, измерив время, необходимое для выполнения известного объема работы. В простом эксперименте для этого можно было бы использовать двигатель, поднимающий массу, наматывая ее на веревку.
Мы знаем, что выполненная работа равна силе, умноженной на расстояние, на котором она приложена:
workdone[J]=force[N]×distance[m]
Механическая мощность двигателя (то есть выходная мощность двигателя) находится путем деления количества полезной работы, выполненной на количество секунд, в течение которых она взялся за завершение работы.
PMech[W]=POut[W]=workdone[J]timetake[s]
Потребляемая мощность электродвигателя
Потребляемая мощность электродвигателя может быть найдена с использованием общего уравнения электрической мощности. Обратите внимание, что это можно сделать, потому что входная мощность электродвигателя представляет собой электрическую мощность.
PElec=PIn=Напряжение[В]×Ток[А]
КПД электродвигателя
КПД устройства — это способ измерения того, сколько энергии, которую вы вкладываете, преобразуется в полезную выходную энергию. Общая формула эффективности устройства:
Эффективность = полезная выходная мощностьвходная мощность
Для электродвигателя входная мощность является электрической, а выходная — механической. Основным источником отработанной энергии в электродвигателе является тепло – оно вырабатывается как электрическое сопротивление проволочных катушек и трение между подвижными и статическими компонентами.
КПД двигателя можно рассчитать, разделив полезную выходную механическую мощность на общую потребляемую электрическую мощность. Это преобразуется в процентную эффективность путем умножения на 100.
КПД двигателя=PmechoutPelecin×100%
Подъем груза 20N на вертикальное расстояние 1 м требует 20J работы. Мотор тянет 0,75 А на 12 В на 3 секунды для подъема груза. Найдите:
Мотор тянет 0,75 А на 12 В на 3 секунды для подъема груза. Найдите:
- Входная мощность двигателя.
- Выходная мощность двигателя.
- КПД двигателя.
Потребляемая мощность
Потребляемая мощность двигателя находится путем умножения напряжения на потребляемый ток:
Pelecin=Voltage×Current=12V×0,75A=9W
Выходная мощность 90 012
Выход мощность двигателя находится путем погружения количества выполненной работы во время (в секундах), затраченное на выполнение работы:
Pmechout=workdonetimetaken=20J3s=6,67 Вт
КПД двигателя
КПД двигателя рассчитывается путем нахождения доли входной мощности, которая преобразуется двигателем в полезную выходную мощность. Чтобы найти КПД в процентах, мы умножаем отношение на 100:
КПД двигателя=6,67W9W×100%=74,1%
Электродвигатели – основные выводы
- Электродвигатели работают благодаря явлению, называемому эффектом двигателя.