Содержание
Механические и оптические энкодеры
Энкодер, или преобразователь угловых перемещений, – это электромеханическое устройство, которое преобразует угловое движение вращающегося объекта (вала) в электрические сигналы, позволяющие определить его положение.
Энкодеры практически полностью заменили распространенные ранее сельсины и широко применяются во многих областях. Они входят в состав разнообразных машин, требующих точной регистрации параметров движения, таких как:
- печатные станки,
- металлообрабатывающие станки,
- лифтовая техника,
- оборудование для фасовки, упаковки и розлива,
- оптические системы (фотообъективы, телескопы),
- устройства ввода информации (мыши, трекболы),
- испытательные стенды,
- роботы и др.
Преобразователи угловых перемещений подразделяются на два типа – абсолютные энкодеры и инкрементные (относительные).
|
Тип |
Особенности |
Преимущества |
Применение |
|
Абсолютный энкодер |
|
|
В высокоточных системах (позиционирование в робототехнике, медицинской технике и т.п.) |
|
Инкрементный энкодер |
|
|
Для задач, не требующих учета абсолютного положения объекта (контроль скорости вращения, ускорения, угла поворота) |
 Мгновенную величину угла поворота объекта определяют путем подсчета импульсов от старта
Мгновенную величину угла поворота объекта определяют путем подсчета импульсов от старта
По принципу действия различают магнитные, магниторезисторные, механические и оптические энкодеры.
В данном устройстве луч света, направленный светоизлучающим диодом, прерывается вращающимся диском, расположенным между приемником и передатчиком света и жестко закрепленным на валу контролируемого объекта. Вращающийся диск имеет в конструкции специальные прорези/щели (или непрозрачные штрихи), либо вместо диска может быть лента с областями с разной отражающей способностью.
Механические энкодеры содержат диск из диэлектрика с нанесёнными выпуклыми, проводящими участками. Считывание абсолютного угла поворота диска производится линейкой контактов.
Считывание абсолютного угла поворота диска производится линейкой контактов.
Ключевое преимущество оптических энкодеров – бесконтактная технология переключения, благодаря которой долговечность устройств увеличивается на порядок.
Электрическими выходными сигналами для инкрементного энкодера являются квадратурные сигналы: последовательные импульсы, сдвинутые по фазе на 90 градусов. Любое разрешение углового положения может быть выражено не в абсолютной форме, а только относительно некоторой опорной точки.
Для абсолютного энкодера вместо последовательного потока битов выводится уникальный цифровой код для каждого дискретного положения вала. Чаще всего используется код Грея, двоичное и двоично-десятичное кодирование.
ПРОЧИП представляет энкодеры фирмы Grayhill – крупнейшего американского производителя надежных компонентов для ответственных применений. В продуктовой линейке – как абсолютные, так и инкрементные энкодеры.
Механический энкодер G080
Механический энкодер с контактным прерывателем. Хорошо подходит для совместной работы с электромеханическим счетчиком. Конструкция позволяет совместную работу с измерительными колесами. Большой дипазон передаточных чисел (число импульсов за оборот выбирается при заказе). Стартовый вращающий момент менее 0,02 Нм. Подсоединение кабелем.
Напряжение 12…230 VAC/VDC на прерывателе
Импульсов / оборот 0,2 … 15 (на выбор)
Максимальная частота 25 Гц
Максимальный ток 2 А
Температура -10…60 °C
Степень защиты IEC 60529 IP 52
Максимальная скорость 1500 об/мин
Диаметр вала 7 мм
Размеры Диаметр 73 мм
Вес 250 г
Technical information (eng).pdf
| Артикул | Наименование | Примечание | |
|---|---|---|---|
G 080. 010A101 010A101 | инкрементальные энкодеры | Заказать | |
| G 080.010A202 | инкрементальные энкодеры | Заказать | |
G 080. 020A115 020A115 | инкрементальные энкодеры | Заказать | |
| G 080.020B110 | инкрементальные энкодеры | Заказать | |
G 080. 010A208 010A208 | инкрементальные энкодеры | Заказать | |
| G 080.020A116 | инкрементальные энкодеры | Заказать | |
G 080. 020A110 020A110 | инкрементальные энкодеры | Заказать | |
| G 080.010B101 | инкрементальные энкодеры | Заказать | |
G 080. 020B111 020B111 | инкрементальные энкодеры | Заказать | |
| G 080.010A205 | инкрементальные энкодеры | Заказать | |
G 080. 020A112 020A112 | инкрементальные энкодеры | Заказать | |
| G 080.020B116 | инкрементальные энкодеры | Заказать | |
G 080. 020A111 020A111 | инкрементальные энкодеры | Заказать | |
| G 080.020A113 | инкрементальные энкодеры | Заказать |
Поворотные энкодеры | Прочный и надежный
Dynapar предлагает широкий выбор угловых энкодеров для любых приложений с обратной связью, включая инкрементальные, абсолютные, миниатюрные и сверхмощные угловые энкодеры. Угловые энкодеры бывают трех основных типов монтажа: с полым валом (полым или сквозным валом), со ступичным валом (отверстие ступицы) или с валом. Энкодеры с полым валом и ступичным валом монтируются непосредственно на вал двигателя, как правило, с помощью троса. Датчики вращения с валом монтируются с помощью гибкой муфты.
Угловые энкодеры бывают трех основных типов монтажа: с полым валом (полым или сквозным валом), со ступичным валом (отверстие ступицы) или с валом. Энкодеры с полым валом и ступичным валом монтируются непосредственно на вал двигателя, как правило, с помощью троса. Датчики вращения с валом монтируются с помощью гибкой муфты.
Узнайте больше о нашей технологии промышленных угловых энкодеров здесь
Все инкрементальные угловые энкодеры
Инкрементальный угловой энкодер обеспечивает превосходную обратную связь по скорости и расстоянию, прост и недорог.
Все абсолютные датчики вращения
Абсолютные датчики вращения лучше всего подходят там, где требуется точность скорости и положения, а также отказоустойчивость.
Энкодеры с валом
Dynapar предлагает широкий ассортимент энкодеров с валом, которые устанавливаются на
двигатель или ведомый вал через гибкую муфту.
Узнать больше
Энкодеры вращения с полым валом
Простые в установке энкодеры вращения с полым валом монтируются непосредственно на вал двигателя.
См. размеры отверстия в диапазоне от 0,25 до 2,875 дюйма.
Узнать больше
Датчики вращения со ступичным валом
Датчики вращения со ступичным валом обеспечивают непосредственный монтаж в ограниченном пространстве и улучшенные
уплотнение без отверстий на задней стороне энкодера.
Узнать больше
Оптические поворотные энкодеры
Оптические поворотные энкодеры Dynapar обеспечивают высокое разрешение и высокую скорость работы
и надежность благодаря технологии обнаружения с фазированной решеткой.
Узнать больше
Магнитные датчики вращения
Магнитные датчики вращения идеально подходят для сред с грязью, пылью и маслом.
Dynapar предлагает как инкрементальные, так и абсолютные модели.
Узнать больше
Специализированные поворотные энкодеры
Миниатюрные энкодеры
Dynapar предлагает миниатюрные энкодеры диаметром менее
1 дюйм для приложений с обратной связью в ограниченном пространстве.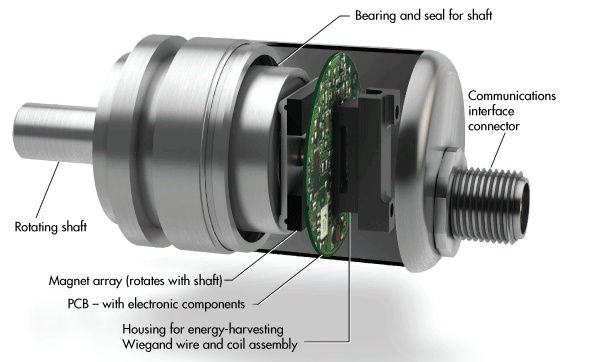
Узнать больше
Бесконтактные энкодеры вращения
Бесконтактные энкодеры вращения или безвальные энкодеры представляют собой компактный корпус
без изнашиваемых валов, муфт, подшипников или уплотнений.
Узнать больше
Кодировщики с классом опасности
Dynapar предлагает несколько кодеров с рейтингом США/Канады, ATEX, CSA и IECEx.
инкрементные энкодеры для применений, требующих взрывозащищенных энкодеров.
Узнать больше
Что такое поворотный энкодер?
Угловой энкодер, часто называемый просто энкодером, представляет собой электромеханическое устройство, которое преобразует угловое позиционирование в выходные сигналы. Поворотные энкодеры можно в целом разделить по типу обратной связи на инкрементальные или абсолютные.
Узнайте больше об абсолютных угловых энкодерах здесь
Узнайте больше об инкрементных угловых энкодерах здесь
Как работают угловые энкодеры?
Датчики вращения преобразуют механическое вращательное движение объекта, например вала двигателя, в электронный сигнал. Оптические поворотные энкодеры измеряют вращение, направляя светодиодный свет через диск с маркировкой на оптический датчик для обнаружения движения. Магнитные поворотные энкодеры используют аналогичный принцип, но измеряют движение, когда намагниченное колесо поворачивается и обнаруживается магнитным датчиком.
Оптические поворотные энкодеры измеряют вращение, направляя светодиодный свет через диск с маркировкой на оптический датчик для обнаружения движения. Магнитные поворотные энкодеры используют аналогичный принцип, но измеряют движение, когда намагниченное колесо поворачивается и обнаруживается магнитным датчиком.
Узнайте больше об оптических поворотных энкодерах здесь
Узнайте больше о магнитных угловых энкодерах здесь
Каков выходной сигнал углового энкодера?
Инкрементальные поворотные энкодеры выдают поток повсеместных импульсов на 360 градусов вращения, отсюда и термин импульсы на оборот PPR. Инкрементальные поворотные энкодеры могут иметь одноканальный выход (A), двухканальный выход (AB, известный как квадратурный), а также дополнительный индексный канал (Z).
Узнайте больше о выходе инкрементного поворотного энкодера здесь
Абсолютные энкодеры выводят уникальное цифровое слово или бит для каждой позиции на 360 градусов вращения. Это цифровое слово должно передаваться на том же языке, что и система управления, с вариантами, включая параллельный, последовательный, полевой шины и протоколы связи на базе Ethernet.
Узнайте больше о протоколах абсолютного энкодера здесь
Когда следует использовать угловой энкодер?
Вращающиеся энкодеры следует использовать в любых приложениях, требующих точного управления движением. В то время как мощность может подаваться на двигатель, чтобы заставить его вращаться, для точного управления скоростью его фактического вращения требуется обратная связь в реальном времени, чтобы управляющее устройство могло увеличивать или уменьшать мощность для достижения постоянной скорости двигателя или положения вала. Поэтому энкодеры незаменимы в приложениях точного управления движением, включая обратную связь серводвигателей, робототехнику, автоматизацию производства и многое другое.
Узнайте больше о применении поворотных энкодеров здесь
#02 Типы энкодеров и механизм | Учебники | Датчики угла поворота | Продукты
#02
Типы и механизм энкодера
Основные сведения о энкодере
Это вторая часть серии, в которой систематизированы и представлены знания, которые мы приобрели.
Тем, кто хочет изучать энкодеры, тем, кто не имеет дела с энкодерами, но хочет знать, в чем заключается работа. Мы хотим помочь этим людям.
Содержание
2-1. Каков механизм обнаружения поворота и угла?
2-2. Какая физическая величина изменяется при вращении?
2-3. Какие типы информации о повороте и угле доступны?
Столбец 1. Энкодер для обнаружения линейного смещения
Сводка
- Энкодер определяет вращение объектов как величину физического изменения с помощью сенсорного элемента и, наконец, передает информацию о вращении/угле наружу в виде электрического сигнала.
- Энкодер подразделяется на четыре типа: механический, оптический, магнитный и с электромагнитной индукцией.
- Существует четыре типа информации, необходимой для вращения двигателя с высокой точностью: величина вращения, скорость вращения, направление вращения и положение вращения.
2-1. Каков механизм обнаружения поворота и угла?
Рисунок 1. Процесс преобразования вращательного движения во вращательную информацию
Процесс преобразования вращательного движения во вращательную информацию
В первой части мы упомянули, что энкодер — это датчик, определяющий угол поворота, линейное перемещение и скорость. Датчик – это элемент или электронный компонент, который улавливает изменения природных явлений. Например, оптический датчик определяет включение/выключение света, а магнитный датчик определяет распределение магнитного поля.
Датчик выполняет следующие функции. Путем вывода обнаруженного изменения физической величины в виде электрического сигнала информация может быть передана наружу. Как показано на рисунке 1, энкодер обрабатывает электрический сигнал, выдаваемый сенсорным элементом, и, наконец, отправляет информацию о вращении/угле наружу в виде цифрового или аналогового электрического сигнала.
2-2. Какая физическая величина изменяется при вращении?
Разница в измеряемой физической величине означает разницу в методе обнаружения датчика, поэтому это важный компонент, определяющий преимущества и недостатки энкодеров.
Энкодеры подразделяются на следующие четыре типа в зависимости от метода обнаружения.
Механический тип (контактный)
Рис. 2. Схема механического (контактного) энкодера
Этот метод определяет положение вращения с помощью переменного резистора, электрическое сопротивление которого изменяется пропорционально углу поворота. Такой механический энкодер обычно называют потенциометром.
При перемещении ползунка на резисторах значение сопротивления потенциометра изменяется пропорционально расстоянию перемещения ползунка.
Оптический тип
Это метод, в котором датчик света используется для определения того, проходит ли свет через щель в радиальном направлении вращающегося диска, называемого кодовым колесом, прикрепленным к валу двигателя.
Сигнал светового импульса изменяется по мере прохождения через щель, и величину вращения вала двигателя можно определить, подсчитав количество импульсов. Мы объясним принцип работы и особенности в части 4.
Мы объясним принцип работы и особенности в части 4.
Рисунок 3. Схема оптического энкодера
Магнитный тип
Рисунок 4. Схема магнитного энкодера
В этом методе используется магнитный датчик для измерения изменений в распределении магнитного поля, создаваемого постоянным магнитом, прикрепленным к валу двигателя.
Когда двигатель вращается, распределение магнитного поля постоянного магнита также изменяется, поэтому, если вы обнаружите его с помощью магнитного датчика, вы сможете определить положение вращения вала двигателя. Мы объясним принцип работы и особенности в части 5.
Тип электромагнитной индукции
Этот метод считывает изменения в магнитном поле, создаваемом между индукционной катушкой (катушка возбуждения) и фиксированной катушкой (катушка обнаружения), прикрепленной к валу двигателя.
Основной принцип такой же, как у трансформатора, использующего электромагнитную индукцию, и такой энкодер называется резольвером.
Источник питания вращающейся индукционной катушки резольвера имеет риск износа из-за контактного метода с помощью щетки. Однако существует преобразователь VR (переменное реактивное сопротивление), который снижает этот риск.
Рисунок 5. Схема датчика электромагнитной индукции
2-3. Какие типы информации о повороте и угле доступны?
Каково состояние вращения?
На примере двигателя он останавливается, вращается по часовой стрелке, вращается против часовой стрелки, вращается с постоянной скоростью, ускоряется, замедляется и т. д.
Существует четыре типа информации, необходимых для точного понимания этих условий и точного вращения двигателя.
Количество оборотов
Рисунок 6. Объяснение величины вращения
Объяснение величины вращения
Это информация о том, сколько раз угол вала двигателя изменился.
Например, в бесщеточном двигателе постоянного тока можно узнать величину вращения ротора, обнаружив изменения в магнитных полюсах ротора, и эффективно вращать двигатель.
Скорость вращения
Это информация о скорости вращения вала двигателя.
Как я упоминал в первом эпизоде, серводвигатель определяет скорость вращения бесщеточного двигателя постоянного тока или двигателя переменного тока и выполняет управление с обратной связью, чтобы вал двигателя вращался со скоростью, заданной сервоусилителем.
Направление вращения
Это информация о том, в каком направлении (по часовой стрелке или против часовой стрелки) вращался вал двигателя.
В системе, определяющей количество оборотов вала двигателя по количеству импульсов, выдаваемых энкодером, если направление вращения не может быть распознано, количество оборотов подсчитывается неправильно.
Рисунок 7. По часовой стрелке и против часовой стрелки
Положение вращения
Это информация о том, сколько градусов составляет угол наклона вала двигателя.
Как мы упоминали в первой части, серводвигатели и шаговые серводвигатели используют энкодеры для определения угла поворота и выполнения управления с обратной связью, оценивая, достигнут ли целевой угол поворота. В результате управление позиционированием осуществляется с высокой точностью.
Сводка
- Энкодер определяет вращение объектов как величину физического изменения сенсорным элементом и, наконец, передает информацию о вращении/угле наружу в виде электрического сигнала.
- Энкодер подразделяется на четыре типа: механический, оптический, магнитный и с электромагнитной индукцией.
- Существует четыре типа информации, необходимой для вращения двигателя с высокой точностью: величина вращения, скорость вращения, направление вращения и положение вращения.


Как это было?
В этой части мы рассказали, что существует четыре типа энкодеров с разными принципами работы в зависимости от определяемой физической величины. Мы также представили, что существует четыре типа информации о вращении, необходимой для вращения двигателя с высокой точностью. Надеюсь, вы понимаете тип и механизм энкодера.
В следующей части мы объясним инкрементный тип и абсолютный тип.
Столбец 1. Энкодер для обнаружения линейного смещения
В станках, требующих точности позиционирования, таких как фрезерные и сверлильные станки, используются энкодеры, определяющие линейное смещение. Существуют следующие два метода обнаружения линейного смещения.
Метод определения линейного смещения с помощью прямого или поступательного датчика линейных перемещений.
Линейный энкодер, также называемый линейной шкалой, состоит из шкалы, которая служит линейкой, и головки, которая определяет информацию о положении.
Как и в случае с поворотным энкодером, существует два метода обнаружения: оптический метод, использующий отражение света, и магнитный метод, использующий магнетизм.