Содержание
Электродвигатель постоянного тока: схема подключения, принцип работы
Главная » Электрика » Основы электротехники
Основы электротехники
Автор Realist На чтение 3 мин Просмотров 22 Опубликовано
Электродвигатели постоянного тока действуют на основе использования принципа магнитной индукции и применяются на производстве в тех случаях, когда необходимо обеспечить регулировку скорости вращения в различных диапазонах, но с высокой точностью. На сегодняшний день существует множество вариантов исполнения электродвигателей постоянного тока. В зависимости от необходимой мощности их работа может обеспечиваться как за счет постоянных магнитов, так и за счет электромагнитов.
Содержание
- Схема подключения электродвигателя постоянного тока
- Устройство электродвигателя постоянного тока
- Принцип действия электродвигателя постоянного тока
- Электродвигатель постоянного тока 12 Вольт
- Электродвигатель постоянного тока П -11 С1 У4 работа
- Двигатель постоянного тока (часть 1)
- Электродвигатели постоянного тока
Схема подключения электродвигателя постоянного тока
Если попробовать отобразить устройство электродвигателя постоянного тока схематически, то у нас получится изображение с двумя цилиндрами, помещенными один в другой. Больший из цилиндров является полым и неподвижным и называется статор или же станина. Внутри станины помещается якорь – меньший из цилиндров, являющийся подвижным. При этом между цилиндрами внутри, в обязательном порядке, должно быть воздушное пространство и они не должны вплотную соприкасаться. Это необходимо, поскольку именно в воздушном зазоре формируется магнитное поле.
Больший из цилиндров является полым и неподвижным и называется статор или же станина. Внутри станины помещается якорь – меньший из цилиндров, являющийся подвижным. При этом между цилиндрами внутри, в обязательном порядке, должно быть воздушное пространство и они не должны вплотную соприкасаться. Это необходимо, поскольку именно в воздушном зазоре формируется магнитное поле.
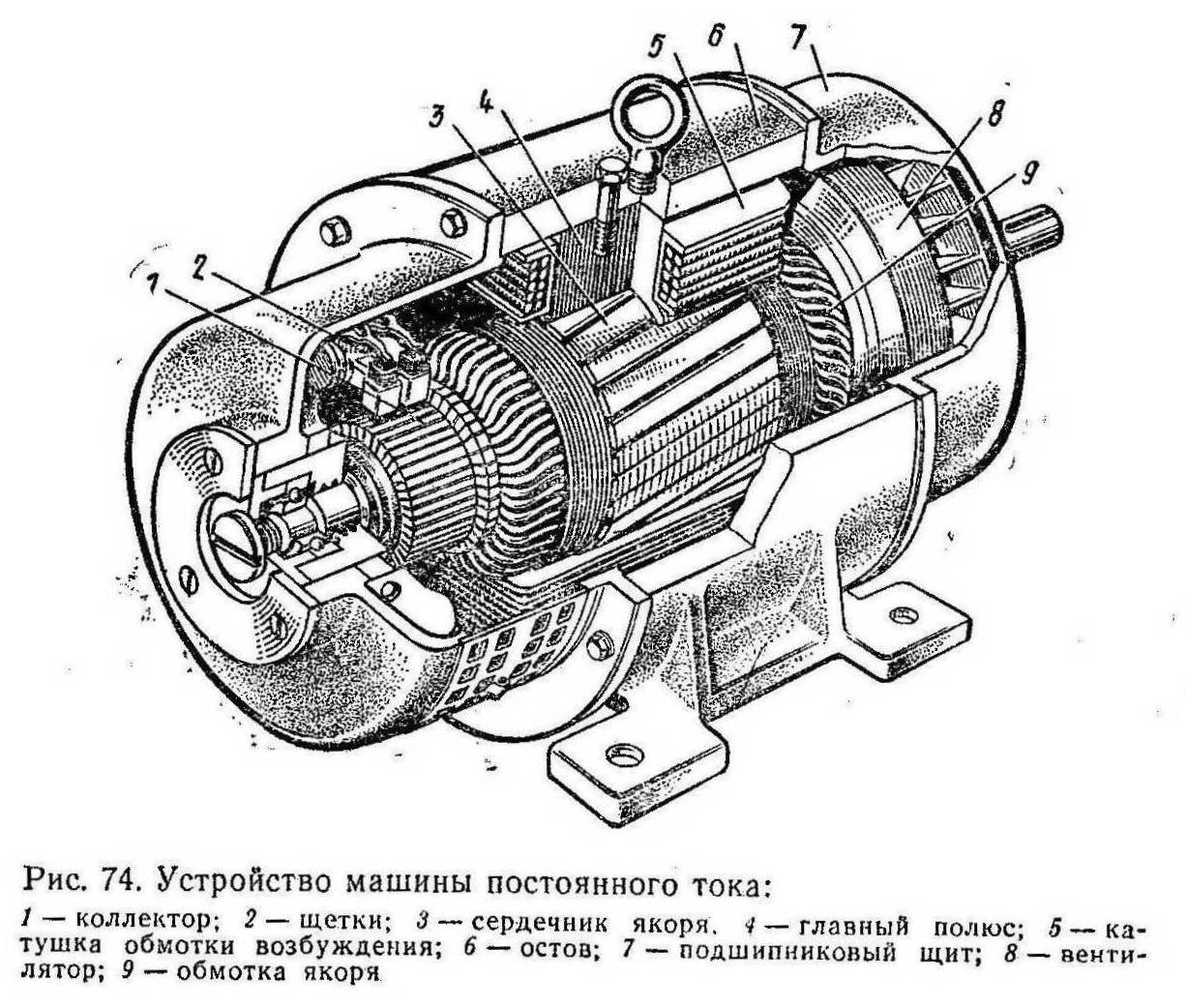
Устройство электродвигателя постоянного тока
Любой электродвигатель состоит из двух основных частей станины (статора) и якоря. На внутренней поверхности статора располагаются полюсы, которые изготавливаются из тонких листов электротехнической стали, изолируются друг от друга при помощи лака и заканчиваются расширениями – наконечниками. Эти наконечники предназначены для равномерного распределения магнитной индукции в воздушном зазоре. Уже непосредственно на самих полюсах располагаются несколько обмоток возбуждения. При этом некоторые из обмоток изготавливаются с большим количеством витков тонкого провода, в то время как конструкция других предполагает малое число витков толстого провода.
Якорь представляет собой зубчатый цилиндр, который устанавливается на валу внутри статора и состоит из пакетов тонких листов электротехнической стали изолированных друг от друга. Стоит отметить, что между каждым отдельным пакетом находятся специальные каналы, предназначенные для вентиляции. В то же время отдельные пазы якоря соединяются между собой проводниками, выполненными из меди. Также необходимым условием при изготовлении якоря является наличие двухслойной обмотки.
Принцип действия электродвигателя постоянного тока
В основе принципа работы любого современного электродвигателя постоянного тока лежит принцип магнитной индукции, а также «Правило левой руки». В том случае, если по верхней части обмотки якоря пропустить ток в одном направлении, а по нижней в другом, то он начнет вращаться. Это обусловлено тем, что по правилу левой руки, проводники, которые уложены непосредственно в пазах якоря, будут выталкиваться из магнитного поля, которое создается станиной.
Таким образом, верхняя часть будет выталкиваться влево, а нижняя – вправо, что приведет к вращению самого якоря, поскольку вся энергия от проводников будет передаваться и ему. Однако, в тот момент, когда проводники провернутся и части якоря поменяются местами расположения, его вращение остановится. Чтобы этого не случилось, в электродвигателе применяется коллектор, предназначенный для коммутирования обмотки якоря.
Электродвигатель постоянного тока 12 Вольт
На сегодняшний день этот тип электродвигателей является одним из самых популярных. Это обусловлено тем, что именно двигатели с таким напряжением устанавливаются на большинство автомобилей и не только на них, но и на множество другой техники, которая применяется для решения самых разнообразных задач.
Электродвигатель постоянного тока П -11 С1 У4 работа
Двигатель постоянного тока (часть 1)
Электродвигатели постоянного тока
Машины постоянного тока | Символы УГО для Visio
- Главная
- Библиотеки Visio
- Схема электрическая принципиальная.
- Состав
- Машины постоянного тока.
Трафареты Visio:
Трафарет Visio Машины постоянного тока.
| Фигура Visio | Условное обозначение |
|---|---|
Электродвигатель постоянного тока, форма 1. Дополнительные элементы:
| |
Электродвигатель постоянного тока, форма 2 Дополнительные элементы:
| |
Электродвигатель постоянного тока. Дополнительные элементы:
| |
Электродвигатель постоянного тока последовательного возбуждения. Дополнительные элементы:
| |
Электродвигатель постоянного тока параллельного возбуждения. | |
| Электродвигатель постоянного тока смешанного возбуждения. | |
| Генератор постоянного тока с постоянным магнитом. | |
| Генератор смешанного возбуждения постоянного тока. |
| Фигура Visio | Условное обозначение |
|---|---|
| Щетка на контактном кольце или коммутаторе. | |
| Символ постоянного тока. | |
| Термистор встроенный. | |
| Постоянный магнит. | |
Обмотка независимого возбуждения:
| |
| Якорь. | |
Обмотка вспомогательного полюса по продольной оси. | |
| Обмотка вспомогательного полюса по поперечной оси. | |
| Обмотка компенсационная. | |
| Обмотка добавочного полюса. | |
| Обмотка последовательного возбуждения. | |
| Обмотка параллельного возбуждения. | |
| Обмотка независимого возбуждения. | |
| Потенциометр, включенный по схеме реостата. | |
| Потенциометр. | |
| Резистор с подвижным контактом (реостат), форма 1. | |
| Резистор с подвижным контактом (реостат), форма 2. | |
| Регулируемый резистор (реостат). | |
| Резистор. |
Используя отдельные элементы электрических машин, можно начертить другие условные обозначения, например двигатель постоянного тока с элементами регулирования (рис. 1)
1)
Рис. 1. Двигатель постоянного тока с элементами регулирования.
Назад
Вперед
Как управлять скоростью и направлением двигателя постоянного тока
Двигатель постоянного тока — это устройство, которое преобразует электрическую энергию в механическую. Сегодня вы найдете двигатели постоянного тока во многих устройствах, на которые мы полагаемся каждый день, таких как бытовая и офисная техника, автомобили, системы контроля доступа и игрушки. В этом уроке мы рассмотрим основные принципы работы двигателей постоянного тока и покажем вам, как управлять скоростью двигателя с помощью ШИМ, Н-мостовой схемы и L29.3D драйвер двигателя.
Как работают двигатели постоянного тока
На провод с током в присутствии магнитного поля действует механическая сила, действующая в определенном направлении.
Чтобы определить фокус этой силы, сэр Джон Амброуз Флеминг разработал простой способ, который использует левую руку, чтобы визуализировать взаимосвязь между потоком тока, направлением магнитного поля и направлением силы. Этот простой, но очень эффективный метод стал известен как правило левой руки Флеминга.
Этот простой, но очень эффективный метод стал известен как правило левой руки Флеминга.
Правило левой руки Флеминга
В двигателе постоянного тока вал соединен с проволочной катушкой, через которую проходит ток. Есть также круглые магниты, окружающие проволочную катушку. Когда на двигатель подается питание, ток течет через проволочную катушку, а магнитное поле заставляет катушку вращаться и поворачивать вал.
Свойства двигателей постоянного тока
При выборе двигателя постоянного тока необходимо учитывать несколько характеристик, определяющих электрические свойства двигателя. В том числе:
- Напряжение: Вы можете найти двигатели постоянного тока, работающие от 1,5 В до 100 В.
- Крутящий момент: Крутящий момент — это сила вращения, которую производит двигатель (в ньютон-метрах). Двигатели постоянного тока для хобби могут варьироваться от 2,8 г-см до 58 кг-см.
- Начальный крутящий момент: Максимальный крутящий момент, развиваемый двигателем, чтобы начать вращательное движение нагрузки.
 Двигатели постоянного тока имеют высокий пусковой момент.
Двигатели постоянного тока имеют высокий пусковой момент. - Скорость двигателя: Скорость вращения двигателя в оборотах в минуту (об/мин). Типичные скорости холостого хода для двигателей постоянного тока находятся в диапазоне от 1 до 20 000 об/мин.
 Двигатели постоянного тока имеют высокий пусковой момент.
Двигатели постоянного тока имеют высокий пусковой момент.Как управлять скоростью двигателя с помощью ШИМ
Скорость двигателя постоянного тока прямо пропорциональна напряжению питания. Простым способом управления скоростью двигателя постоянного тока является регулирование напряжения питания с помощью широтно-импульсной модуляции (ШИМ).
Широтно-импульсная модуляция (ШИМ)
Основная идея ШИМ заключается в том, что она очень быстро включает и выключает напряжение питания. Регулируя длину импульсов ВКЛ/ВЫКЛ, мы можем установить напряжение в диапазоне от 0 В до максимального напряжения. Мы будем использовать этот ШИМ-сигнал для прямого питания двигателя.
ШИМ-драйвер двигателя
Существует несколько способов генерации ШИМ-сигнала для двигателя, но в этом руководстве мы будем использовать таймер 555. Вот схема этой цепи:
Вот схема этой цепи:
555 Нестабильный мультивибратор с таймером для управления двигателем постоянного тока
Выход таймера 555 включает и выключает транзистор Q1. Конденсатор С1 заряжается и разряжается через резисторы R1 и R3. Время зарядки или разрядки конденсатора зависит от номиналов резисторов R1 и R3. Как только конденсатор заряжается, он быстро разряжается через диод D2 и переменный резистор RV1 на вывод 7. В процессе разрядки выход таймера 555 падает до 0 В и отключает транзистор. Поворот переменного резистора регулирует скорость двигателя.
Драйвер двигателя H-Bridge
Типичный двигатель постоянного тока имеет два соединительных провода — один для отрицательной клеммы, а другой — для положительной клеммы. Если вы поменяете местами эти клеммы (изменив полярность), двигатель будет вращаться в противоположном направлении. Конечно, есть лучшие способы управления направлением двигателя постоянного тока без постоянной смены клемм.
Для этого мы можем использовать схему H-Bridge. Схема H-Bridge получила свое название от четырех транзисторов, которые выглядят как буква «H». Схема Н-моста обеспечивает управление двигателем в обоих направлениях за счет использования различных комбинаций переключателей (S1-S4). В реальном сценарии мы используем транзисторы вместо обычных переключателей.
Схема H-Bridge получила свое название от четырех транзисторов, которые выглядят как буква «H». Схема Н-моста обеспечивает управление двигателем в обоих направлениях за счет использования различных комбинаций переключателей (S1-S4). В реальном сценарии мы используем транзисторы вместо обычных переключателей.
Простой Н-мост
Принцип работы этой схемы прост. У нас есть четыре переключателя, S1-S4. Если мы откроем S2 и S3 и закроем S1 и S4, ток будет течь по часовой стрелке от VCC к земле. Теперь, чтобы поменять полярность двигателя, мы открываем S1 и S4 и замыкаем S2 и S3. Теперь двигатель постоянного тока вращается в противоположном направлении.
Вот схема схемы управления направлением вращения двигателя H-моста:
Конфигурация транзистора H-моста. BW1 и BW2 управляют обратным направлением двигателя, а FW1 и FW2 реверсируют двигатель постоянного тока.
Драйвер двигателя L293D
Как следует из названия, драйвер двигателя L293D предназначен для управления двигателями постоянного тока. L293D — это популярная ИС драйвера двигателя со встроенной схемой Н-моста, которая может одновременно управлять двумя двигателями постоянного тока. Он может подавать ток до 1 А и напряжение от 4,5 В до 36 В.
L293D — это популярная ИС драйвера двигателя со встроенной схемой Н-моста, которая может одновременно управлять двумя двигателями постоянного тока. Он может подавать ток до 1 А и напряжение от 4,5 В до 36 В.
Это означает, что моторный привод L293D идеально подходит для создания платформ многоколесных роботов. Вот схема L293D, показывающая, как подключать двигатели:
Схематическая диаграмма L293D-управление двумя двигателями постоянного тока
L293D Описание контактов
| L293D Контакт | Описание | 1 (Включить 1-2) | Управляет левой частью водителя |
| 2 (Вход-1) | Контакт входа сигнала |
| 3 (Выход-1) | Подключается к одной из клемм двигателя |
| 4 и 5 | Заземление 9007 2 |
| 6 (Выход-2) | Подключается к одной из клемм двигателя |
| 7 (Вход-2) | Контакт входа сигнала |
| 8 (Vcc2) | |
| 9 (Enable3-4) | Управляет правой частью драйвера |
| 10 (Вход-3) | Вход сигнала | 11 (Выход-3) | Соединение к одному из выводов двигателя |
| 12 и 13 | Заземление |
| 14 (Выход-4) | Подключается к одной из клемм двигателя |
| Контакт входа сигнала | |
| 16 Vss | Источник питания |
Надеюсь, эта статья помогла вам лучше понять, как использовать двигатели постоянного тока в ваших электронных проектах! Оставьте комментарий ниже, если у вас есть какие-либо вопросы.
Двигатель постоянного тока
Двигатель постоянного тока
Далее: Примеры работы
Вверх: Магнитная индукция
Предыдущий: Двигатель переменного тока
В установившемся режиме двигатель переменного тока всегда
вращается с частотой чередования его источника питания.
Таким образом, двигатель переменного тока, питаемый от бытовой сети, вращается с частотой 60 Гц в
США и Канаде, а также на частоте 50 Гц в Европе и Азии. Предположим, однако, что
нам нужна переменная скорость 9Электродвигатель 0178. Мы всегда могли использовать
двигатель переменного тока, приводимый в действие источником переменного тока переменной частоты, но такая мощность
расходные материалы очень дорогие. Гораздо дешевле
альтернативой является использование двигателя постоянного тока, приводимого в действие источником постоянного тока. Давайте
исследовать двигатели постоянного тока.
Двигатель постоянного тока состоит из тех же основных элементов, что и электрический генератор постоянного тока:
т. е. , многовитковая катушка, которая может свободно вращаться в постоянном магнитном поле.
е. , многовитковая катушка, которая может свободно вращаться в постоянном магнитном поле.
поле. Кроме того, вращающаяся катушка подключена к внешней цепи.
точно так же, как в генераторе постоянного тока: т.е. , через разрезное кольцо
коммутатор, который меняет полярность катушки по отношению к
внешней цепи всякий раз, когда катушка проходит через плоскость, перпендикулярную
к направлению магнитного поля. Предположим, что
внешний источник постоянного напряжения
( например , батарея или генератор постоянного тока) ЭДС подключена через двигатель.
Источник напряжения пропускает постоянный ток вокруг внешнего
цепи и через двигатель. Когда ток течет по катушке,
магнитное поле действует на катушку, заставляя ее вращаться.
Предположим, что двигатель в конце концов достигает установившегося режима вращения
частота . Вращающаяся катушка создает противо-ЭДС,
величина прямо пропорциональна частоте вращения [см. (222)].
 44:
44:
На рис. 44 показана рассматриваемая схема. Мотор смоделирован
как резистор, который представляет собой внутреннее сопротивление
двигатель последовательно с противо-ЭДС. Конечно, обратная ЭДС
действует в направлении, противоположном внешней ЭДС. Применение Ома
закон вокруг цепи дает
| (228) |
который дает
| (229) |
Скорость, с которой двигатель совершает механическую работу, равна
| (230) |
Предположим, что двигатель постоянного тока подвергается небольшой внешней нагрузке, так что только
должен выполнять механическую работу с относительно низкой скоростью. В этом случае,
В этом случае,
двигатель будет раскручиваться до тех пор, пока его противо-ЭДС не станет немного меньше
больше, чем внешняя ЭДС, так что через
двигатель [согласно уравнению (229)] и, следовательно, механическое
выходная мощность двигателя
является относительно низким [согласно уравнению (230)]. Если нагрузка на двигатель
увеличивается, то двигатель будет замедляться, так что его
обратная ЭДС уменьшается, ток, протекающий через двигатель, увеличивается, и,
следовательно, выходная механическая мощность двигателя увеличивается до тех пор, пока
соответствует новой нагрузке. Обратите внимание, что текущий поток
через двигатель постоянного тока обычно ограничивается противо-ЭДС, а не
внутреннее сопротивление двигателя. На самом деле обычные двигатели постоянного тока сконструированы
в предположении, что обратная ЭДС всегда будет ограничивать ток, протекающий через
двигателя до относительно небольшого значения. Если мотор заклинит, так что катушка остановится
вращается и противо-ЭДС падает до нуля, то ток, который
потоки через двигатель, как правило, настолько велики, что могут сжечь двигатель.
если позволить течь в течение любого заметного промежутка времени. По этой причине,
мощность электродвигателя
всегда следует немедленно отключать, если двигатель заедает. Когда двигатель постоянного тока
запускается, катушка сначала не вращается достаточно быстро, чтобы
генерировать значительную обратную ЭДС. Таким образом, существует короткий период времени,
сразу после включения двигателя, при котором двигатель потребляет относительно
большой ток от его источника питания. Это объясняет, почему свет
в доме иногда
тусклый кратковременно, когда большой двигатель, например,
включается двигатель кондиционера.
Предположим, что двигатель постоянного тока подвергается постоянной, но относительно небольшой нагрузке.
Как упоминалось выше, двигатель будет раскручиваться до тех пор, пока его противо-ЭДС почти
соответствует внешней ЭДС. Если внешняя ЭДС увеличивается, то двигатель
будет раскручиваться дальше, пока его противо-ЭДС не совпадет с новой внешней
э.д.с. Точно так же, если внешняя ЭДС уменьшается, двигатель будет вращаться.