Содержание
Naza-М V2 краткая инструкция по применению и распиновке разъемов
Сервисное обслуживание и ремонты любых квадрокоптеров!
Обучение полетам на квадрокоптерах.
Шаг 1 Назначение и распиновка портов
* ESC: Электронный регулятор скорости
Шаг 2 Применение и соединения
Шаг 1 Подготовьте летательный аппарат, поддерживающий следующие смешанные типы
Направление стрелки на диаграмме показывает направление вращения двигателя / воздушного винта
Важно: Для коаксиальных пропеллеров: Синий — пропеллер на вершине; Красный — пропеллер внизу. В противном случае все пропеллеры вверху.
Примечание: Система управления полетом Naza-М V2 не поддерживает функцию управления карданным подвесом камеры при использовании на дроне — октокоптере. Для большого самолета, который больше, чем 650 или с тяжелым грузом, рекомендуется установка WKM.
Шаг 2 Монтаж и подключение
Главный контроллер (MC): (1) Логотип DJI располагается так, чтобы смотрел в небо, не устанавливайте MC в обратном порядке. (2) Стороны MC должны быть параллельны корпусу летательного аппарата. (3) стрелка должна указывать направлении на нос самолета. (4), МС находится в наилучшем положении недалеко от центра самолета тяжести. Убедитесь, что все порты доступны для установки разъемов. Рекомендуется зафиксировать MC при условии, когда все работы по установке электропроводок и конфигурации завершены, используя 3M прорезиненную бумагу, чтобы не исправлять потом место установки MC.
(2) Стороны MC должны быть параллельны корпусу летательного аппарата. (3) стрелка должна указывать направлении на нос самолета. (4), МС находится в наилучшем положении недалеко от центра самолета тяжести. Убедитесь, что все порты доступны для установки разъемов. Рекомендуется зафиксировать MC при условии, когда все работы по установке электропроводок и конфигурации завершены, используя 3M прорезиненную бумагу, чтобы не исправлять потом место установки MC.
ESCs и моторы: Пожалуйста, применяйте для установки на дроне ESCs и электродвигатели, рекомендованные для применения изготовителями вашего летательного аппарата. Мы настоятельно рекомендуем вам применять DJI электродвигатели двигатели и драйверы ESCs (обратитесь к описанию для указанных узлов). Подключайте все ESCs электодвигателей в MC методом подсоединения, согласно нумерации поддерживаемых модулем аппаратов смешанных типов. Обратите внимание: Если вы устанавливаете только 3 блока ESCs, убедитесь что установленные ESCs находится на середине 1520us. Не используйте установку ESCs на середину 700us, так как это может привести к тому, что дрон улетит навсегда или привести к серьезным травмам и повреждениям самого аппарата. После установки связи, калибруйте ESCs по одному непосредственно через приемник перед соединением их в свой MC, убедитесь, в программной работоспособности и возможности выключения помощника, остановки и нормального старта для каждого драйвера, чтобы получить наилучшую управляемость.
Не используйте установку ESCs на середину 700us, так как это может привести к тому, что дрон улетит навсегда или привести к серьезным травмам и повреждениям самого аппарата. После установки связи, калибруйте ESCs по одному непосредственно через приемник перед соединением их в свой MC, убедитесь, в программной работоспособности и возможности выключения помощника, остановки и нормального старта для каждого драйвера, чтобы получить наилучшую управляемость.
Карданный подвес: Если используется карданный подвес, подключите сервоприводы карданного подвеса к портам F1 и F2 и используйте программное обеспечение для изменения конфигурации.
Передатчик (TX) и приемник (RX): (1) Смотрите сначала руководство TX по настройке каналов: Элерон, Лифт, Дроссель, Руль, и выберите третью переключателя режима управления. (2) Прикрепите соответствующий RX на летательный аппарат, затем подключите RX с соответствующим портом MC. На следующей диаграмме показан пример подключения для традиционной RX.
PMU модуль: Не подключайте PMU на другом устройстве. Настоятельно рекомендуется обеспечить достаточный поток воздуха через PMU. Совет: Если используется с DJI мульти-ротор, вы можете припаять кабель питания к силовым контактам на площадке нижней доске. Пожалуйста, обратитесь к DJI руководству мульти-ротора для уточнения деталей. Если использовать аппарат с 3-я воздушными винтами, вы можете установить независимую батарею только для PMU.
Светодиодный модуль: Убедитесь, что Вы сможете увидеть свет модуля во время полета. Оставьте интерфейс USB, чтобы быть доступным. Используйте предоставленную клейкую бумагу 3M для установки.
(Опционально) Совмещенный модуль GPS / Компас: GPS / Компас является достаточно чувствительным прибором к источникам магнитных помех, и обязательно должны быть установлен удаленно от любых электронных устройств. Если вы используете свой собственный монтажный стержень, убедитесь, что он не обладает магнитными свойствами! Процедуры: (1) Вы должны использовать эпоксидную смолу AB, чтобы собрать GPS кронштейн в первую очередь. Установите кронштейн на центральной пластине. Расположите кронштейн, по меньшей мере минимум на расстоянии 10 см от любого винта. (2) Логотип DJI отмечен на GPS ориентируйте вверх прямо в небо и стрелкой прямо вперед, затем закрепите GPS на плите кронштейном (3M клей прилагается). Подсказка: GPS / компас изначально упакован с особой индикацией линии для монтажа.
Установите кронштейн на центральной пластине. Расположите кронштейн, по меньшей мере минимум на расстоянии 10 см от любого винта. (2) Логотип DJI отмечен на GPS ориентируйте вверх прямо в небо и стрелкой прямо вперед, затем закрепите GPS на плите кронштейном (3M клей прилагается). Подсказка: GPS / компас изначально упакован с особой индикацией линии для монтажа.
Шаг 3 Установка и настройка программного обеспечения
Установка и запуск приложения на Windows
1. Загрузите драйвер мастера автоматической установки помощника настройки конфигурации в формате EXE из раздела загрузок сайта.
2. Запитайте блок передатчика, а затем модуль автопилота.
3. Подключите модуль автопилота к персональному кумпьютеру при использовании кабеля достаточной длины micro-USB .
4. Включите мастер установки автоматической установки помощника настройки конфигурации и выполняйте подсказки, чтобы завершить установку
Установщик в формате EXE поддерживается на Win XP, Win7, Win8 (32 или 64 бит).
Установка и запуск на Mac OS X
1. Скачать установщик помощник в формате DMG со страницы загрузки на Naza-М V2 на DJI
2. Включите мастер установки автоматической установки помощника настройки конфигурации и выполняйте подсказки, чтобы завершить установку.
3. При запуске в первый раз, если используется Launchpad для запуска Naza-М V2, помощник программного обеспечения Launchpad не будет разрешать доступ, потому что программное обеспечение не было рассмотрено Mac App Store.
4. Найдите значок V2 Naza-M в Finder и откройте файл, управления или щелкнув правой кнопкой мыши на иконке, и выбрав «Открыть» из меню.
5. После первого успешного запуска, дважды щелкнув значок V2 Naza-M в поиске или с помощью Launchpad
Откроется приложение.
Часть 9. Настройка полетного контроллера DJI NAZA
Опубликовано 05.09.2014
В последней статье цикла рассмотрим базовые настройки полетного контроллера после которых вполне можно начать свой первый полет.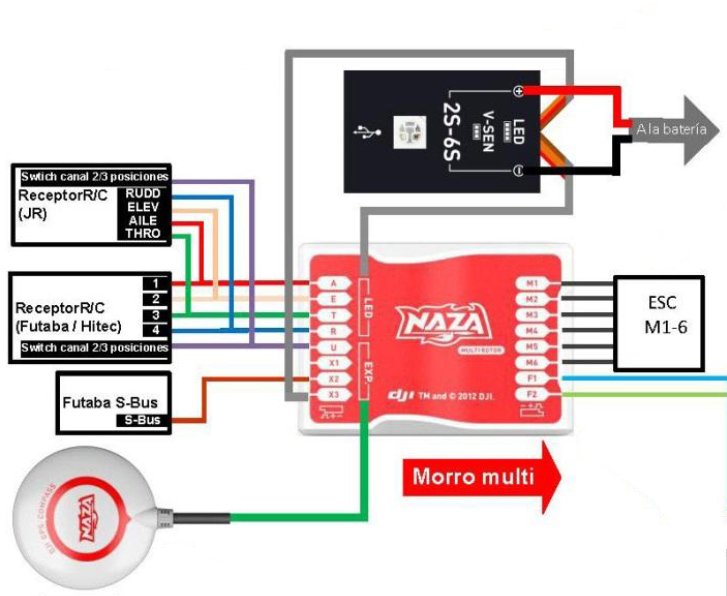
Установка программного обеспечения
Полетный контроллер DJI NAZA очень прост в работе. Его установка и настройка очень проста, и летает он при этом очень стабильно. С другой стороны он полностью закрыт и вы не сможете переделать или дополнить его функции. Но! До настройки полетный контроллер не знает, чем он управляет, и полететь без предварительной настройки никуда не получится.
Перед настройкой обязательно снимите винты!
Для настройки скачайте и установите программу Naza-M Assistant Software v2.20. Подайте питание на коптер и подключите полетный контроллер по USB.
Настройка
В стартовом окне запуска вы увидите основные настроенные параметры:
Стартовое окно NAZA Assistant
Перейдите сразу в меню Basic на вкладку Aircraft. На этой вкладке необходимо произвести выбор коптера:
Выбор типа коптера
У нас X-коптер, который летает развалом вперед. Обратите внимание на направление вращения двигателей. Оно должно строго соответствовать! Для проверки есть функция Motor Test. Она позволит на малый промежуток времени с небольшим газом запустить двигатели по отдельности.
Она позволит на малый промежуток времени с небольшим газом запустить двигатели по отдельности.
Убедитесь, что винты сняты, все подключено корректно и нигде ничего не задевает. Нажмите кнопку Motor Test, подтвердите, что все подготовительные операции выполнены и вы увидите следующее окно:
Проверка двигателей
Вы можете понажимать кнопки и проверить корректность работы двигателей.
На вкладке Mounting задаются параметры установки GPS-антенны. У нас нет GPS-модуля, так что мы пропускаем эту вкладку.
Перейдите на вкладку RC. Здесь вы сможете настроить параметры системы радиоуправления.
Настройка радиоуправления
Здесь можно проверить работу системы радиоуправления. В центре экрана вы видите монитор стиков. Включите пульт и подвигайте стиками — ползунки должны двигаться в соответствии с вашими командами.
Диапазон сигналов пульта необходимо откалибровать. Для этого в поле Command Stick Calibration нажмите кнопку Start. Когда начнется процесс калибровки вам нужно будет покачать стики между крайними положениями и нажать Stop. После этого установите все стики в среднее положение и убедитесь что все ползунки тоже встали в среднее положение.
Когда начнется процесс калибровки вам нужно будет покачать стики между крайними положениями и нажать Stop. После этого установите все стики в среднее положение и убедитесь что все ползунки тоже встали в среднее положение.
В этом окне есть ещн мониторы дополнительных каналов. Их можно использовать для регулировки параметров управления, режимами управления и т.д. Мы эти функции не используем.
На следующей вкладке Gain можно настроить остроту управления аппаратом.
Настройки чувствительности
Basic Gain — реакция на стики по всем четырем каналам. Чем больше, тем резче будет коптер отрабатывать команды.
Attitude Gain — скорость реакции на внешний воздействия. Например, на дуновение ветра. Чем больше, тем интенсивнее коптер будет возвращаться на удерживаемую позицию.
Remote Adjust — удаленная настройка. Позволяет при использовании дополнительного канала управления подстраивать коэффициенты с пульта.
При первом полете рекомендуется оставить все эти коэффициенты без изменения. Со временем, вы наберетесь опыта и подстроите их под себя.
Со временем, вы наберетесь опыта и подстроите их под себя.
На этом выставление основных настроек закончено и вы можете приступить к первым полетам!
Как обычно, ссылки на остальные статьи цикла:
Часть 1. Что такое квадрокоптер
Часть 2. Элементы квадрокоптера
Часть 3. Все об аккумуляторах для квадрокоптеров
Часть 4. Рама квадрокоптера
Часть 5. Подсветка коптера
Часть 6. Подключение элементов квадрокоптера
Часть 7. Настройка пульта Turnigy9x для коптера
Часть 8. Настройка регуляторов оборотов бесколлекторного двигателя
Часть 10. Гиростабилизированный подвес для камеры SJ4000
Мы будем очень рады, если вы поддержите наш ресурс и посетите магазин наших товаров shop.customelectronics.ru.
Метки: DJI NAZA, коптер, настройка
Просмотров: 28796
Please enable JavaScript to view the comments powered by Disqus.
Наза-М V2 — Часто задаваемые вопросы | DJI
Вопросы по установке оборудования
Поддерживает ли он мультикоптеры только с 3 пропеллерами?
Нет, это не так.
Поддерживает ли он передатчики и приемники Spectrum?
Да, это так.
Нужно ли использовать отдельное питание BEC для питания MC?
Нет необходимости, VU уже включает функцию BEC.
Могу ли я использовать Y-провод для соединения двух двигателей?
В принципе, один порт MC подключается к одному ESC и одному двигателю.
Что делать, мой самолет всегда дрейфует вперед?
Никогда не перемещайте дрон в течение 5 секунд после включения питания. В вашем передатчике нет триммера.
Предупреждение о низком напряжении доступно в ручном режиме или нет?
Да, предупреждение о низком напряжении доступно в ручном режиме.
При включении моторы настраиваются слишком быстро или слишком медленно, что мне делать?
Измените скорость холостого хода двигателя с помощью вспомогательного программного обеспечения.
Объясните, пожалуйста, почему компьютер не распознает USB-устройство?
Убедитесь, что драйвер успешно установлен, PMU должен быть подключен к светодиодному порту MC, а не к порту Ext.
Какое OSD может поддерживать NAZA?
NAZA не имеет функции OSD, можно использовать продукт OSD третьей части.
Основы
Можно ли использовать NAZA-M на вертолетах?
Нет, нельзя использовать на вертолете.
Почему мой НАЗА-М не стабилен в условиях низких температур?
Сначала поставьте свой дрон на улицу на несколько минут.
Каково использование порта NAZA-M EXT?
Используется для модуля GPS.
Поддерживает ли NAZA-M приемник PPM?
Да, это так.
Некоторые самолеты с установленной Назой сильно дрейфуют, а некоторые очень устойчивы. Почему это?
Вы не можете зафиксировать положение без GPS-модуля Naza. На летные характеристики сильно влияет окружающая среда, например, ветреная погода, механическая настройка, центр тяжести и т. д.
Когда мой Naza взлетает в режиме пространственного положения, его сносит в сторону, почему?
Пожалуйста, проверьте моторы и ESC. Также возможно, что ошибка датчика NAZA слишком велика, подключитесь к вспомогательному программному обеспечению и откалибруйте IMU.
Также возможно, что ошибка датчика NAZA слишком велика, подключитесь к вспомогательному программному обеспечению и откалибруйте IMU.
Когда я нажимаю на ручку газа, Нана-М не реагирует, почему?
Чтобы предотвратить ошибочную работу, вам необходимо выполнить CSC. Подробные инструкции см. в руководстве пользователя.
Когда я запускаю CSC, моторы не реагируют, почему?
Обратите внимание на состояние мигания светодиода.
Четыре желтых мигания означают предварительный прогрев, и после предварительного прогрева все будет в порядке.
Четыре зеленых мигания означают, что произошла ошибка датчика. Подключитесь к вспомогательному программному обеспечению и выполните калибровку IMU.
Четыре красных мигания означают, что стики не находятся в центральном положении, подключите программное обеспечение и откалибруйте передатчик.
Светодиоды мигают нормально, но когда я запускаю CSC, моторы по-прежнему не реагируют?
Проверьте подключение к источнику питания.
Пожалуйста, проверьте команды джойстика передатчика и сопоставление его каналов в программном обеспечении, они должны быть согласованными и скользить по всему диапазону. Также проверьте отображение дроссельной заслонки и канала шага.
Также проверьте отображение дроссельной заслонки и канала шага.
Почему светодиод постоянно мигает желтым и красным цветом после включения питания?
Это означает, что компас был скомпрометирован, пожалуйста, откалибруйте компас.
Могу ли я использовать LED/GPS V2 на V1 или Lite?
Нет, нельзя.
Светодиод непрерывно мигает красным, желтым и зеленым, программное обеспечение показывает ERR 25, а ускорение показывает ERROR, дрон не может взлететь?
Внутренний датчик может выйти из строя из-за столкновения. Пожалуйста, свяжитесь с местным дилером для послепродажного обслуживания.
У меня запросил серийный номер после установки вспомогательного программного обеспечения, где я могу получить серийный номер?
Серийный номер уже введен, повторно вводить не нужно. Это связано с тем, что вы не подключили основной контроллер или неправильно установили драйвер.
Я выполнил инструкции по регистрации, но не получил письмо с активацией?
Пожалуйста, подтвердите правильность вашего адреса электронной почты или проверьте спам.
Для регистрации рекомендуется использовать Gmail, hotmail и т.д.
После того, как я собрал самолет и полетный контроллер, каждый раз, когда я пытаюсь взлететь, он переворачивается?
Пожалуйста, внимательно прочитайте руководство пользователя, это может быть вызвано неправильной установкой. Пожалуйста, проверьте:
1. ориентацию основного контроллера;
2. направление вращения двигателя и гребного винта;
3. ESC находятся в правильном порту;
4. установить правильный тип микшера в программе;
Самолет кружит при зависании, и круг становится все больше и больше, я чуть не потерял над ним контроль?
Компас взломан. Пожалуйста, откалибруйте компас. Если проблема не может быть решена, обратитесь к руководству пользователя «Эффект унитаза».
Почему желтый индикатор все еще мигает, когда я переключаюсь в режим GPS?
Основной контроллер не смог идентифицировать модуль GPS и компаса. Пожалуйста, проверьте соединение.
Вопросы о настройках программного обеспечения
Поддерживает ли ПО Assistant Mac?
Нет, на данный момент работает только на Win XP, Win7, Win8.
После регистрации в Assistant Software я все еще не могу войти в систему?
Пожалуйста, войдите в свой почтовый ящик и сначала нажмите на ссылку, чтобы активировать регистрацию, затем вы можете войти в программное обеспечение, указав адрес электронной почты и пароль для входа в систему.
Что я могу сделать, если программное обеспечение и главный контроллер не могут быть подключены?
Драйвер помощника не был успешно установлен. Сначала подключите MC к питанию, подключите USB-кабель, затем установите драйвер.
Что делать с ошибкой конфигурации?
Пожалуйста, откалибруйте стики передатчика и перезапустите MC.
Нет реакции двигателей при постановке на охрану, что делать?
См. подробные инструкции в руководстве. Запустите программное обеспечение, чтобы проверить, может ли ручка управления на вашем передатчике достичь полного диапазона, направления правильные или нет. Пожалуйста, отключите USB, когда вы делаете тестирование. Рекомендуемые параметры полета
для Flame Wheel F550?
Параметры по умолчанию 100% нормальные, но их можно отрегулировать в соответствии с фактическими условиями полета и различными ощущениями от управления.
Как настроить 3-переключатель для режима управления полетом?
Подключите канал переключателя к каналу U MC, используйте меню Trim, чтобы настроить 2-й переключатель на Atti. Режим, используйте Конечную точку, чтобы настроить 1-й и 3-й переключатель для ручного режима и режима GPS.
Как настроить отказоустойчивость?
Убедитесь, что все каналы вашего передатчика поддерживают отказоустойчивость, настройте любой из 3 режимов управления переключателем на отказоустойчивость, затем запишите значение положения в отказоустойчивости вашего передатчика. После этого переключитесь в другой режим управления и выключите передатчик, программа-помощник покажет, что он перешел в отказоустойчивый режим, а светодиод тем временем загорится синим светом, настройка выполнена.
Как подобрать пропеллеры и моторы?
Очень важно, чтобы винты и двигатели соответствовали друг другу, чтобы получить хорошие летные характеристики. Рекомендуется двигатель 900KV, соответствующий 8-10 дюймам.
Мой красный светодиод быстро мигает, в чем проблема?
Подключите MC к программному обеспечению, чтобы проверить, в чем проблема, а затем найти соответствующие решения.
Где разместить главный контроллер?
MC должен быть установлен рядом с C.G. Нет необходимости в демпфировании, просто используйте двустороннюю наклейку 3M.
Какой режим следует использовать в передатчике?
Установите тип вашей модели как Самолет.
Поддерживает ли программное обеспечение ОС Vista?
Да, это так.
Высота не может быть заблокирована, почему?
Отрегулируйте усиление по вертикали, используйте кривую дросселя по умолчанию и дроссель 50% для зависания.
NAZA-M Assistant Software Список кодов ошибок
CFG-ERR
Ошибка конфигурации, это может быть вызвано обновлением прошивки со старой версии или неправильной калибровкой Tx. Повторно откалибруйте передатчик, выключите и снова включите контроллер и проверьте все параметры.
VOL-LOW [4]
Низкое напряжение
SN-ERR
Ваш серийный номер недоступен. Обратитесь к своему дилеру. (Место покупки)
VOL-LOW[6]
Низкое напряжение
IMU-ERR
IMU ERROR, обратитесь к дилеру. (Место покупки)
(Место покупки)
X1-ERR
Вы выбрали настройку параметров по каналу X1/X2 с помощью ручки Tx, но на входном канале X1/X2 не обнаружен сигнал, или Tx не включен.
X2-ERR
Вы выбрали настройку параметров по каналу X1/X2 с помощью ручки Tx, но на входном канале X1/X2 не обнаружен сигнал, или Tx не включен.
PMU-ERR
Проверьте соединение между аккумулятором, MC и PMU.
RX-ERR
Пожалуйста, убедитесь, что вы находитесь на странице RC программного обеспечения NAZA Assistant, выберите правильный тип приемника или проверьте подключение приемника, после этого выключите и снова включите контроллер, чтобы изменения вступили в силу.
COMPASS-ERR
Данные компаса неверны, перезапустите контроллер. Если эта ошибка по-прежнему возникает, обратитесь к своему дилеру (место покупки).
ОШИБКА [25]
Ошибка инициализации IMU, может быть вызвана сбоем. Пожалуйста, свяжитесь с дилером (место покупки).
ОШИБКА [26]
Выполните расширенную калибровку.
ОШИБКА [27]
GPS не откалиброван или помехи магнитного поля. Пожалуйста, откалибруйте GPS еще раз в хорошем состоянии. По всем вопросам технической поддержки обращайтесь к своему дилеру.
Почему моя ОС Windows 7 не может успешно установить драйвер помощника?
- У некоторых пользователей операционной системы WINDOWS 7 может отсутствовать файл usbser.sys. Загрузите этот файл и поместите его в папку C:\WINDOWS\system32\drivers, а затем переустановите драйвер.
- Загрузите файл usbser.sys.
Подключение драйвера DJI к Windows 10 и программному обеспечению NAZA-M V2 WalkingDroid
Недавно я купил новый ноутбук и хотел, чтобы программное обеспечение для настройки нового ноутбука вносило изменения в поле. У меня никогда не было проблем с установкой программного обеспечения или драйвера DJI на мой рабочий стол или другие системы, которые у меня были ранее. После установки программного обеспечения Naza-M Assistant v2.20 я установил драйвер DJI и подключил дрон к USB-кабелю. К сожалению, после многочисленных попыток установить программное обеспечение компьютер не распознал новое оборудование или тот факт, что питание дрона DJI Phantom осуществлялось через USB.
К сожалению, после многочисленных попыток установить программное обеспечение компьютер не распознал новое оборудование или тот факт, что питание дрона DJI Phantom осуществлялось через USB.
Поискав в Интернете, я нашел проблему и простой способ решить ее. Вам понадобятся эти файлы, как указано выше:
- Naza-M Assistant Software v2.20
- Драйвер DJI
- Загрузите все файлы с веб-сайта DJI
Шаг 1. Установите программное обеспечение Naza-M Assistant v2.20
Это просто: следуйте инструкциям и установите программное обеспечение, чтобы настроить DJI Phantom. Убедитесь, что дрон не подключен к ПК. После установки закройте экран NAZA, так как он больше не нужен для этого исправления.
Шаг 2. Установка драйвера DJI
Начните установку драйвера из zip-файла или EXE-файла. Появится всплывающее окно для подключения MC, который, как я полагаю, является главным контроллером. Подключите USB-кабель от дрона к ПК и включите дрон с аккумулятором. Завершите установку, и в моем случае появилось сообщение об ошибке «DJI Drone не найден, нечего обновлять» или подобное.
Завершите установку, и в моем случае появилось сообщение об ошибке «DJI Drone не найден, нечего обновлять» или подобное.
Действия по исправлению драйвера DJI, чтобы Windows 10 распознала его
- Держите DJI Drone подключенным к ПК и включенным
- Перейдите в Диспетчер устройств. В Windows 10 вы можете просто нажать кнопку Windows и начать вводить « Диспетчер устройств ». Это также можно найти в Панели управления вашего компьютера
- Найдите раздел « последовательных портов ». В этом разделе вы ищете USB-устройство. Рядом с ним будет номер COM-порта. У меня был COM5 (USB Serial Device COM 5)
- Щелкните правой кнопкой мыши на последовательном USB-устройстве и щелкните « Обновить программное обеспечение драйвера 9».0187 »
- Затем выберите « Поиск драйвера на моем компьютере »
- Выберите « Позвольте мне выбрать из списка драйверов устройств на моем компьютере »
- Нажмите кнопку « Есть диск » в правом нижнем углу
- Нажмите « Browse » и перейдите к пути установки драйвера DJI.
 Он должен находиться в этой области: «C:\Program Files (x86)\DJI product\DJI Driver 2.02\source64\dji_vcom_driver11.inf»
Он должен находиться в этой области: «C:\Program Files (x86)\DJI product\DJI Driver 2.02\source64\dji_vcom_driver11.inf» - Найдите папку Source64 (т. е. 64-разрядная версия) и выберите файл с расширением .INF. Нажмите ОТКРЫТЬ на этом файле. Имя файла: dji_vcom_driver11.inf
- Драйвер DJI теперь будет устанавливаться правильно, и после полной установки будет отображаться DJI USB Virtual COM
.
 Он должен находиться в этой области: «C:\Program Files (x86)\DJI product\DJI Driver 2.02\source64\dji_vcom_driver11.inf»
Он должен находиться в этой области: «C:\Program Files (x86)\DJI product\DJI Driver 2.02\source64\dji_vcom_driver11.inf»Как только это будет сделано, вы можете открыть ПО Naza-M Assistant, и драйвер DJI будет автоматически выбран, а значения с вашего дрона правильно введены в программное обеспечение. Теперь вы можете вносить изменения с помощью программного обеспечения NAZA-M.
Вы получили сообщение об ошибке о подписании драйвера?
Иногда, в зависимости от безопасности, вы можете получить сообщение об ошибке подписи драйвера. Драйвер установлен неправильно или аналогично. Это связано с настройками безопасности Windows 10 для подписи подписи драйвера DJI.