Содержание
БЕСКОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ BLDC
Бесколлекторные двигатели постоянного тока (BLDC — Brushless DC electric motor) часто используется в мотор-колесе электросамокатов и электровелосипедов. Его первые версии появились в 1960-х годах. Двигатели BLDC намного эффективнее и имеют гораздо больший крутящий момент.
Размещение постоянного магнита в роторе (внутренняя конфигурация) и управление окружающими катушками через транзисторы, позволило устранить самый важный недостаток щеточных (коллекторных) двигателей постоянного тока, которым являются сами щетки.
В альтернативной конфигурации (внешний ход) катушки якоря могут образовывать твердый сердечник, вокруг которого вращается ротор с постоянным магнитом, приводящий в движение вал двигателя. В обоих случаях катушки неподвижны.
Двигатели BLDC считаются двигателями с электронной коммутацией (ECM) в отличие от щеточных двигателей с механической коммутацией.
Общий принцип управления двигателем BLDC
Для двигателей BLDC требуются современные электронные контроллеры, которые могут определять положение ротора. Для этой цели можно использовать датчик Холла, реагирующий на положение каждой из катушек якоря при работающем двигателе. Скорость двигателя BLDC больше не может регулироваться напряжением, как в щеточных двигателях, а только путем изменения частоты переключения. Эти двигатели питаются от сигнала ШИМ, как показано на рисунке.
Для этой цели можно использовать датчик Холла, реагирующий на положение каждой из катушек якоря при работающем двигателе. Скорость двигателя BLDC больше не может регулироваться напряжением, как в щеточных двигателях, а только путем изменения частоты переключения. Эти двигатели питаются от сигнала ШИМ, как показано на рисунке.
Двигатели BLDC делятся на 1-фазные, 2-фазные и 3-фазные, но принцип работы является общим для всех типов. Вместо механического коммутатора, изменяющего направление магнитного поля катушек ротора, используются транзисторы, которые непрерывно изменяют фазу напряжения подаваемого на катушку статора, что заставляет ротор непрерывно вращаться.
Однофазные бесколлекторные (бесщеточные) двигатели используются в устройствах с низким энергопотреблением, в то время как двухфазные чаще в устройствах средней мощности. Типичные области применения 3-фазных двигателей – устройства чтения компакт-дисков.
Управление однофазными двигателями BLDC
Однофазные двигатели BLDC имеют две параллельные обмотки якоря, управляемые напряжением ШИМ через мост H. Выходной сигнал одного датчика Холла постоянно меняет полярность тока, протекающего через обмотку якоря, таким образом поддерживая непрерывное вращение ротора. Однофазные двигатели BLDC очень просты в управлении. Для их работы достаточно одной интегральной микросхемы, например LB11970RV (однофазный двухполупериодный драйвер).
Выходной сигнал одного датчика Холла постоянно меняет полярность тока, протекающего через обмотку якоря, таким образом поддерживая непрерывное вращение ротора. Однофазные двигатели BLDC очень просты в управлении. Для их работы достаточно одной интегральной микросхемы, например LB11970RV (однофазный двухполупериодный драйвер).
Принцип управления однофазным двигателем BLDC
Управление двухфазными двигателями BLDC
Двухфазные двигатели немного сложнее в управлении. Якорь состоит из 4 катушек, а магнитное поле создается 4 парами постоянных магнитов. Катушки якоря сгруппированы попарно, поэтому двухфазные двигатели имеют больший крутящий момент, чем однофазные.
Двухфазные двигатели обычно используются в некритических низкоуровневых устройствах, таких как большие вентиляторы, поэтому там не требуются сложные контроллеры. В результате двухфазные двигатели мощнее и дешевле. Драйверы, такие как например LB1668M, могут использоваться для их управления.

Управление 3-фазными двигателями BLDC
Трехфазные двигатели BLDC имеют 3 катушки якоря, соответствующие 6 состояниям коммутации. В каждую из катушек обычно помещают датчики Холла, которые реагируют на прохождения над ними постоянных магнитов, которые являются элементами ротора. Принцип использования сигналов от датчиков Холла показан на рисунке.
Конструкция двигателя BLDC с датчиками Холла
Тут тоже сигналы от датчиков Холла определяют моменты переключения. Эти сигналы через соответствующую систему подключения включают транзисторы, которые напрямую управляют катушками двигателя. Конечно, переключение в трехфазных двигателях происходит в 3 раза быстрее, чем в однофазных. Это приводит к снижению вибрации (дёргания) и более точному контролю скорости. Примером трехфазного драйвера двигателя BLDC с датчиками Холла является микросхема LB1976.
Принцип управления мотором BLDC с использованием датчиков Холла
Двигателями также можно управлять без датчиков Холла, используя сигнал BEMF (Back EMF) от каждой катушки.
Этот сигнал получается путем сравнения напряжения, индуцированного в каждой из трех катушек, с центральным напряжением (точка COM). Результат такой связи усиливается и передается в систему определения положения ротора.
 Этот сигнал получается путем сравнения напряжения, индуцированного в каждой из трех катушек, с центральным напряжением (точка COM). Результат такой связи усиливается и передается в систему определения положения ротора.
Этот сигнал получается путем сравнения напряжения, индуцированного в каждой из трех катушек, с центральным напряжением (точка COM). Результат такой связи усиливается и передается в систему определения положения ротора.Сигналы от трех катушек преобразуются в формы импульсов, сдвинутых друг относительно друга на 120 °. Некоторые контроллеры используют простые компараторы для определения фазы каждой обмотки, другие требуют использования внешних микроконтроллеров. Трехфазный интегрированный бессенсорный контроллер LB11983 включает в себя датчик положения ротора со схемами запуска, синхронизации, переключения, тепловой защиты и контроля насыщения и не требует внешнего микроконтроллера.
Принцип управления двигателем BLDC с помощью сигнала BEMF
Драйверы двигателей BLDC, использующие сигналы BEMF, имеют проблему с определением положения ротора во время запуска, потому что эти сигналы еще не генерируются. В этом случае двигатель запускается с неизвестного положения, то есть неизвестно положение статора относительно ротора. Это положение необходимо быстро распознать во время работы, потому что включение неправильной фазы может изменить направление вращения двигателя и даже сделать невозможной работу.
Это положение необходимо быстро распознать во время работы, потому что включение неправильной фазы может изменить направление вращения двигателя и даже сделать невозможной работу.
Форум
Бесщеточный электродвигатель — WOODWARD, INC
Добавить в папку «Избранное»
Добавить к сравнению
Более подробная информация на сайте WOODWARD, INC
Характеристики
- Применение
- для легкого самолета
- Тип
- бесщеточный, BLDC
Описание
Woodward является лидером в области проектирования и разработки бесщеточных электродвигателей постоянного тока для аэрокосмической и оборонной промышленности. Бесщеточные двигатели постоянного тока (BLDC) компании Woodward изначально были разработаны на основе линейки двигателей переменного тока. Woodward производит двигатели постоянного тока BLDC для критически важных аэрокосмических и оборонных применений уже более 30 лет.
ХАРАКТЕРИСТИКИ И ФУНКЦИОНАЛЬНОСТЬ
Бесщеточные двигатели постоянного тока (BLDC) компании Woodward изначально были созданы на основе линейки двигателей переменного тока.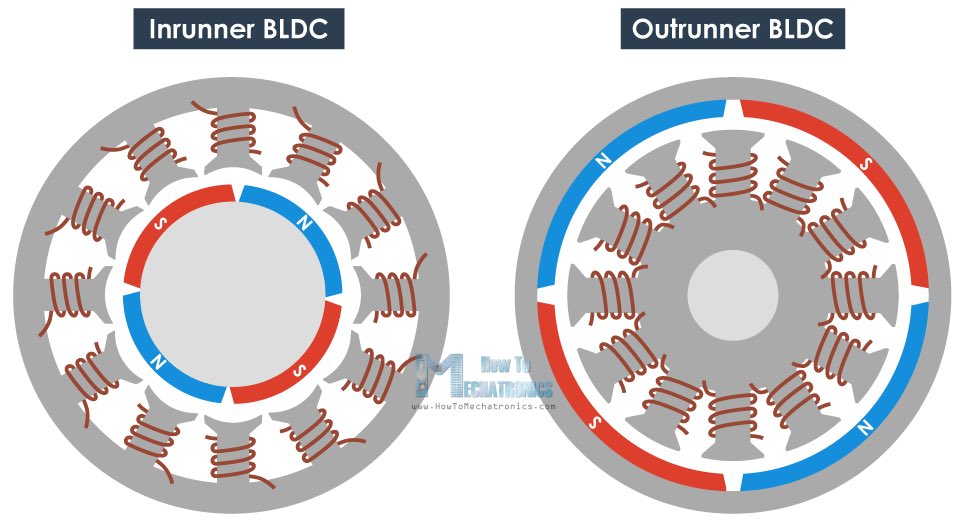 Woodward производит двигатели постоянного тока BLDC для критически важных аэрокосмических и оборонных применений уже более 30 лет
Woodward производит двигатели постоянного тока BLDC для критически важных аэрокосмических и оборонных применений уже более 30 лет
Размер и мощность
Двигатели BLDC компании Woodward обладают самой высокой мощностью и плотностью мощности среди всех двигателей, которые мы производим. Двигатели Woodward BLDC выпускаются с различными материалами магнитов ротора, включая неодимовые и самарий-кобальтовые сплавы. Размерный ряд включает популярные дюймовые коды диаметров от 8 до 80 (.75″ — 8.0″) и различные длины сердечника. Woodward также предлагает несколько больших размеров с номинальным диаметром до 8 дюймов и пиковой мощностью до 100 лошадиных сил
Датчики коммутации
Woodward предлагает различные датчики коммутации, включая датчики эффекта Холла или резольверы с твердым и намотанным ротором, в зависимости от области применения. Мы можем оптимизировать устройства на базе резольверов для минимального пульсирующего момента с использованием синусоидального привода тока двигателя. Woodward также предлагает конструкции BLDC без датчиков, которые особенно полезны в современных турбомашинах.
Другие распространенные области применения BLDC-двигателей Woodward включают
Сервоприводы целеуказания и навигации
Оружейные турели
Давление в кабине
Привод коммунальных служб
Управление полетом
Приводы насосов
Приводы вентиляторов
Квалификация и соответствующий опыт
—
Это автоматический перевод. (просмотреть оригинал на английском языке)
Каталоги
Для этого товара не доступен ни один каталог.
Посмотреть все каталоги WOODWARD, INC
Более подробная информация на сайте WOODWARD, INC
Другие изделия WOODWARD, INC
CRITICAL SYSTEM COMPONENTS
Посмотреть всю продукцию WOODWARD, INC
* Цены указаны без учета налогов, без стоимости доставки, без учета таможенных пошлин и не включают в себя дополнительные расходы, связанные с установкой или вводом в эксплуатацию. Цены являются ориентировочными и могут меняться в зависимости от страны, цен на сырьевые товары и валютных курсов.
Что такое BLDC (бесщеточный двигатель постоянного тока)?
Бесщеточный двигатель постоянного тока (BLDC) представляет собой небольшой, но мощный тип электродвигателя, который использует постоянный ток в качестве источника питания. Из-за своего размера и эффективности BLDC становятся все более популярными и числом приложений, для которых они используются.
Из-за своего размера и эффективности BLDC становятся все более популярными и числом приложений, для которых они используются.
Что такое мощность постоянного тока?
Электрический ток — это движение электронов по проводнику, например по проводу. Есть два вида тока:
- Переменный ток (AC)
- Постоянный ток (DC)
Переменный ток означает, что электроны периодически меняют направление. Это вызвано генератором переменного тока или вращающимся магнитом, который изменяет направление движения электронов 60 раз в секунду. Переменный ток вырабатывается генератором и подходит для массового производства и распространения. Переменный ток может непосредственно питать определенные типы двигателей, например, асинхронные двигатели переменного тока.
Постоянный ток означает, что электроны движутся только в одном направлении. Питание постоянного тока происходит от батареи или источника питания, подключенного к сети переменного тока.
Как постоянный ток питает мой двигатель?
В щеточном двигателе постоянного тока угольные «щетки» перемещаются по медному коммутатору, который представляет собой ряд аксиально ориентированных медных стержней, соединенных с рядом обмоток во вращающемся якоре. В любой момент времени находящиеся под напряжением обмотки будут вызывать силу притяжения к постоянным магнитам, прикрепленным к внутренней части корпуса двигателя. Это вызывает вращение двигателя без необходимости какого-либо электронного управления.
BLDC двигатель имеет другую конструкцию. Щетки отсутствуют, обмотки неподвижны. Вращающаяся часть (ротор) не имеет обмоток. Здесь установлены постоянные магниты. Чтобы заставить вал вращаться, электронная схема управления должна переключать ток на соответствующие обмотки в правильной последовательности, чтобы вызвать вращение. Большинство используют трехфазную схему обмотки и управляются трехфазным инвертором. Эта электронная схема регулирует скорость и крутящий момент двигателя, изменяя частоту и величину трехфазной мощности, приводящей двигатель в движение.
Почему BLDC лучше?
Без угольных щеток и медного коллектора единственными изнашиваемыми элементами двигателя BLDC являются подшипники. Это делает двигатель BLDC намного лучше, когда требуется длительный срок службы.
Поскольку обмотки являются стационарными и находятся в тепловом контакте с внешним корпусом, тепло рассеивается легче, что позволяет работать с более высокой мощностью при том же размере корпуса. Кроме того, без щеток и коллектора общая длина меньше.
Без механического контакта щеток практичны более высокие скорости и пиковые нагрузки.
Угольные щетки — конструктивная особенность первых электродвигателей. Они до сих пор используются как недорогая альтернатива бесколлекторным двигателям.
В щеточных двигателях угольная щетка служит проводником электричества к ротору. Недостатком является то, что трение между неподвижными щетками и движущимся ротором может привести к износу и потере мощности.
Бесщеточные двигатели заменяют менее прочную конструкцию щеток электронным контроллером.![]() Контроллер контролирует, какие катушки в статоре активны, что обеспечивает постоянно меняющееся магнитное притяжение.
Контроллер контролирует, какие катушки в статоре активны, что обеспечивает постоянно меняющееся магнитное притяжение.
Электродвигатели BLDC имеют более широкий диапазон скоростей и лучшее отношение крутящего момента к скорости. Они также обеспечивают более высокий уровень крутящего момента по сравнению с их размером, что делает их идеальными для таких применений, как электроинструменты.
Растущее разнообразие применений
Двигатели постоянного тока BLDC зарекомендовали себя как надежный выбор во многих приложениях, особенно в ситуациях с большими объемами.
Поскольку они эффективны, бесшумны и способны работать непрерывно в течение длительного времени, они являются хорошим выбором для автоматизации, сельскохозяйственных и бытовых функций. Некоторые из наиболее распространенных применений включают:
- Электроинструменты
- Садовое оборудование
- Сканеры
- Роботы
- Компьютеры
- Подъемно-транспортное оборудование / Конвейеры
- Насосы
- Воздуходувки
- Робототехника
- Медицинское оборудование
Мы знаем двигатели BLDC
Интересно, есть ли BLDC двигатель является правильным выбором для вашего приложения? Мы можем помочь. Используйте наш более чем 30-летний опыт для работы над вашим проектом. Позвоните по телефону 763-383-6936 или свяжитесь с нами, чтобы связаться с дружелюбным экспертом BLDC сегодня.
Используйте наш более чем 30-летний опыт для работы над вашим проектом. Позвоните по телефону 763-383-6936 или свяжитесь с нами, чтобы связаться с дружелюбным экспертом BLDC сегодня.
Этот веб-сайт использует файлы cookie для улучшения вашего опыта. Мы предполагаем, что вы согласны с этим, но вы можете отказаться, если хотите. Настройки файлов cookieПРИНЯТЬ
BLDC | Хакадей
25 марта 2023 г. Дэн Мэлони
Вы должны передать это [Карлу Бугейе] — он придумал одни из самых интересных электромеханических конструкций, которые мы когда-либо видели. Его последний проект тоже здесь: одна печатная плата, которая складывается в четырехколесный моторизованный вездеход.
Ключ к дизайну [Карла] заключается в его бесколлекторных двигателях на печатной плате, которые он совершенствовал с тех пор, как мы впервые заметили их в 2018 году. Идея состоит в том, чтобы использовать дорожки на печатной плате для катушек статора, чтобы управлять напечатанным ротор, содержащий крошечные магниты. Они работают на удивление хорошо, даже если они не генерируют огромного крутящего момента. Гибкая конструкция печатной платы [Carl] с металлическими ребрами жесткости немного напоминает развернутую картонную коробку с двумя парами катушек двигателя на каждой из боковых панелей. Это оставляет другие поверхности доступными для всей электроники, включая PIC, микросхему драйвера и датчик Холла для каждого двигателя, IMU и датчик приближения для навигации, а также ESP32 для управления шоу.
Они работают на удивление хорошо, даже если они не генерируют огромного крутящего момента. Гибкая конструкция печатной платы [Carl] с металлическими ребрами жесткости немного напоминает развернутую картонную коробку с двумя парами катушек двигателя на каждой из боковых панелей. Это оставляет другие поверхности доступными для всей электроники, включая PIC, микросхему драйвера и датчик Холла для каждого двигателя, IMU и датчик приближения для навигации, а также ESP32 для управления шоу.
С механически обработанными алюминиевыми роторами и шинами из термополиуретана, установленными на сложенном шасси, он отправился в гонки, хотя и медленно. Отсутствие крутящего момента от двигателей и малый вес вездехода, наряду с некоторым нежелательным трением из-за плохо подогнанных соединений, в совокупности приводили к медленному продвижению, особенно на чем-либо, кроме мертвой плоской поверхности. Но с некоторыми настройками [Карл] смог заставить багги работать достаточно хорошо, чтобы назвать это победой. Посмотрите сборку и тестирование в видео ниже.
Посмотрите сборку и тестирование в видео ниже.
Зная [Карла], мы не в последний раз видим складной вездеход. В конце концов, он придерживался своей конструкции двухколесного двигателя на печатной плате и в конце концов заработал довольно хорошо. Мы будем следить за прогрессом в этом.
Читать далее «Одиночная гибкая печатная плата складывается в четырехколесный вездеход с двигателями» →
Posted in Robots HacksTagged BLDC, бесколлекторный, ESP32, flex, pcb, pcb motor, pic, robot, ротор, вездеход, статор
15 марта 2023 г., Эйб Коннелли
Люди из [Института Баркхаузена] проводят исследования по управлению автономным парком радиоуправляемых автомобилей и используют готовые электронные регуляторы скорости (ESC) для управления двигателями автомобилей. К сожалению, им требовалась более надежная обратная связь для управления двигателями с обратной связью, поэтому они создали свой собственный аппаратный бесщеточный контроллер постоянного тока (BLDC) с открытым исходным кодом.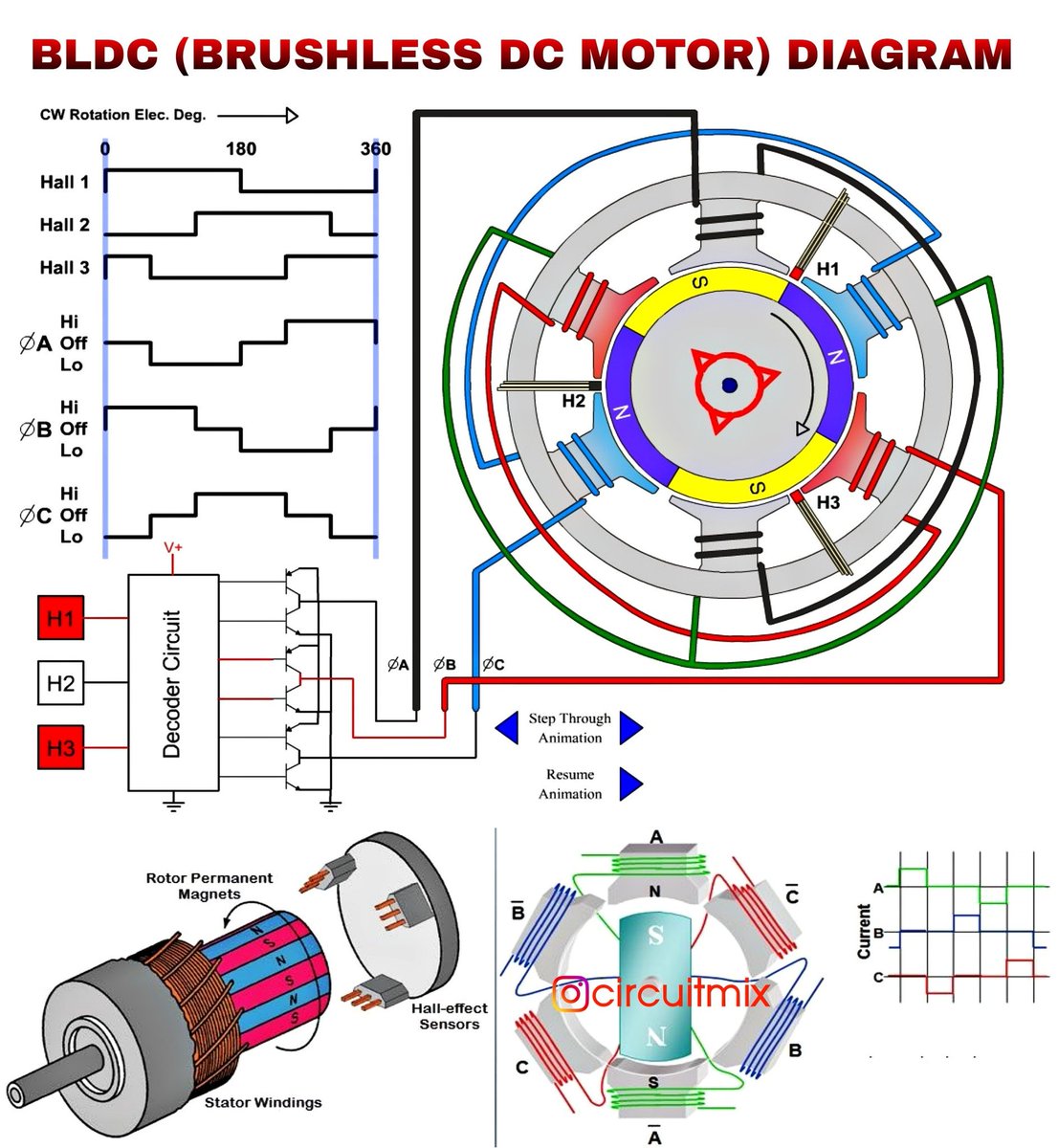
В разработанном ими контроллере двигателя используется микроконтроллер STM32, который взаимодействует с 3-фазным драйвером MOSFET TMC6140 для управления 6 IRLR 2905 МОП-транзисторов. Исследователи [Института Баркхаузена] использовали библиотеку SimpleFOC в качестве основы для программирования STM32 с установленными датчиками на эффекте Холла, указывающими ориентацию двигателя для их управления с обратной связью.
Разработка функционирующих контроллеров BLDC и ESC может быть тонкой, и в их посте подробно описаны проблемы и решения, которые они придумали, чтобы справиться с тем, что в конечном итоге было неправильной изоляцией полевых МОП-транзисторов, мешающих шине питания для STM32. Исходный код контроллера двигателя BLDC доступен на странице GitLab. Для получения дополнительной информации о родительском проекте, в котором используется драйвер BLDC, обязательно ознакомьтесь с их работой над подключенным конвоем радиоуправляемых автомобилей.
В настоящее время существует множество драйверов и проектов BLDC с открытым исходным кодом, многие из которых мы показывали в прошлом, например, Moteus и тактильная интеллектуальная ручка, и приятно видеть, что другие проекты исследуют другие варианты.
Опубликовано в аппаратное обеспечение, Микроконтроллерыпомеченный BLDC, Контроллер BLDC, двигатель bldc, бесколлекторный регулятор, МОП-транзисторы, аппаратное обеспечение с открытым исходным кодом, stm32
26 января 2023 г. Дэн Мэлони
Контроллеры современных игровых консолей не лишены недостатков — кому-нибудь не нравится дрейф Joy-Con? Проблемы могут быть связаны с недостатками конструкции, но мы подозреваем, что энтузиазм пользователя и механические нагрузки, которые он может вызвать, также могут сыграть значительную роль. В любом случае, [Мариус Хейер] решил взглянуть на то, что потребуется для создания лучшего джойстика, и пришел к некоторым интересным результатам.
Первое видео ниже закладывает базовую основу, а также ряд экспериментов с 3-осевыми датчиками на эффекте Холла, в частности с датчиками Texas Instruments TMAG5273 и TMAG5170. По сути, это один и тот же датчик с разными интерфейсами — SPI для 5170 и I2C для 5273. Используя только один из этих датчиков, он смог построить джойстик с обычным управлением по осям X и Y, а также с поворотная ось. Более того, он построил моторизованную версию с двумя шаговыми двигателями NEMA 17 для механического перемещения ручки обратно в центр.
Используя только один из этих датчиков, он смог построить джойстик с обычным управлением по осям X и Y, а также с поворотная ось. Более того, он построил моторизованную версию с двумя шаговыми двигателями NEMA 17 для механического перемещения ручки обратно в центр.
Джойстик громоздкий, но, похоже, у него есть планы на гораздо меньший с двигателями PCB в стиле [Carl Bugeja], который должен поместиться в контроллер PS4. Это тема второго видео ниже, в котором используется другой датчик Холла — Allegro A1304 — и в основном он связан с получением выходных данных от немоторизованного, но значительно миниатюризированного джойстика, говорящего на языке, который ожидает контроллер. Это не простой процесс, но, похоже, он идет хорошо, и мы будем внимательно следить за прогрессом.
продолжить чтение «Изучение эффекта Холла для тактильной обратной связи джойстиков PS4» →
Опубликовано в Взломы периферийных устройств, Взломы для Playstationпомеченный BLDC, эффект холла, тактильный, Джойстик, неодим, двигатель печатной платы, ps4, датчик, TMAG5170, TMAG5273
29 ноября 2022 г.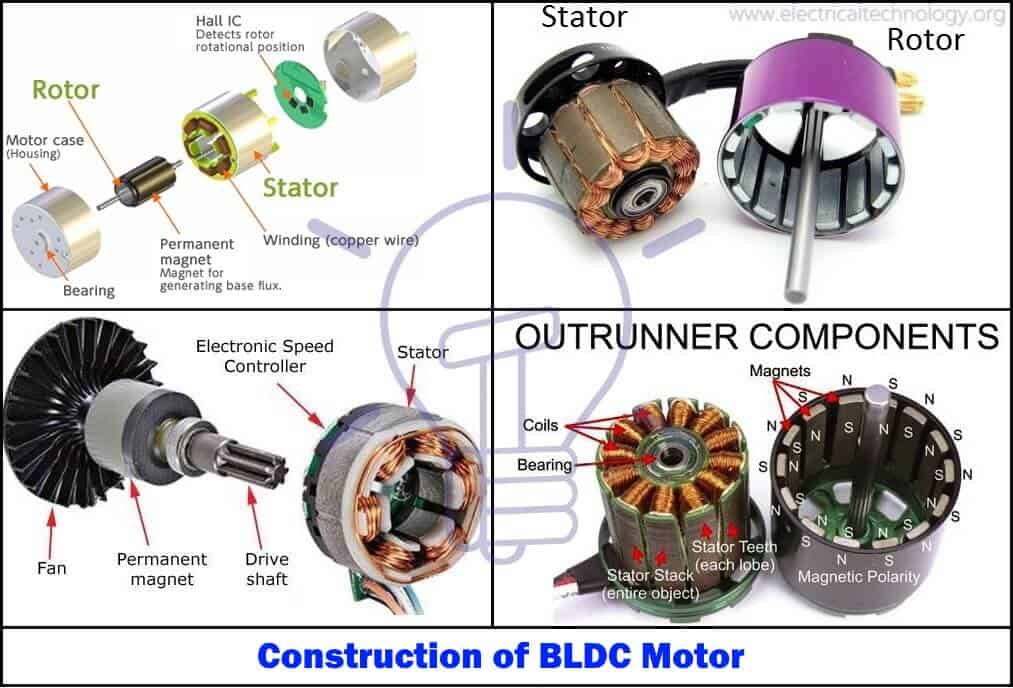 Дэн Мэлони
Дэн Мэлони
Ничто не сравнится с днем, проведенным на озере в маленькой лодке с подвесным мотором, которая плывет за вами. Это очень весело, хотя, возможно, немного шумно из-за всего, что происходит. И, возможно, этот маслянистый блеск на воде после вас не так уж и приятен. возможно, рыбу тоже немного раздражает то, что вы кладете. Если подумать, подвесные моторы — это небольшая проблема.
К счастью, есть способ получше, например, переделать старый подвесной мотор в электрический. Он приходит к нам через [Антона], который наткнулся на идеальную донорскую платформу — подвесной двигатель мощностью 5 л. Он начал с того, что вырвал старый двигатель и трансмиссию из корпуса, чтобы освободить место для двигателя BLDC и его привода. Мотор сам по себе был проектом; [Антон] перемотал оригинальный статор гораздо более толстой проволокой и изменил конфигурацию катушки, чтобы выжать из нее как можно больше крутящего момента. То, что начиналось как двигатель на 180 кв, превратилось в 77 кв с гораздо большим количеством меди и новыми датчиками Холла для контроллера. Он также приложил массу усилий для гидроизоляции двигателя эпоксидной смолой. С напечатанным на 3D-принтере винтом и обтекаемым обтекателем новый мотор отлично смотрится на подвесном лодочном моторе. На самом деле, все это почти не выглядит настроенным — регулятор скорости находится прямо на румпеле, где вы и ожидаете.
Он также приложил массу усилий для гидроизоляции двигателя эпоксидной смолой. С напечатанным на 3D-принтере винтом и обтекаемым обтекателем новый мотор отлично смотрится на подвесном лодочном моторе. На самом деле, все это почти не выглядит настроенным — регулятор скорости находится прямо на румпеле, где вы и ожидаете.
Видео ниже показывает сборку и пробный запуск, а также анализ возникших проблем, главная из которых — проникновение воды. Но, как справедливо отмечает [Антон], эту проблему легко решить, повторно используя оригинальный карданный вал и установив двигатель выше ватерлинии, вот так. Тем не менее, нам нравится, как это выглядит, и идея почти бесшумно стучать по воде кажется замечательной.
продолжить чтение «Этот электрический подвесной мотор делает день на воде спокойным» →
Posted in Transportation HacksTagged BLDC, лодка, электромобиль, лед, двигатель, пропеллер, статор
24 июня 2022 г.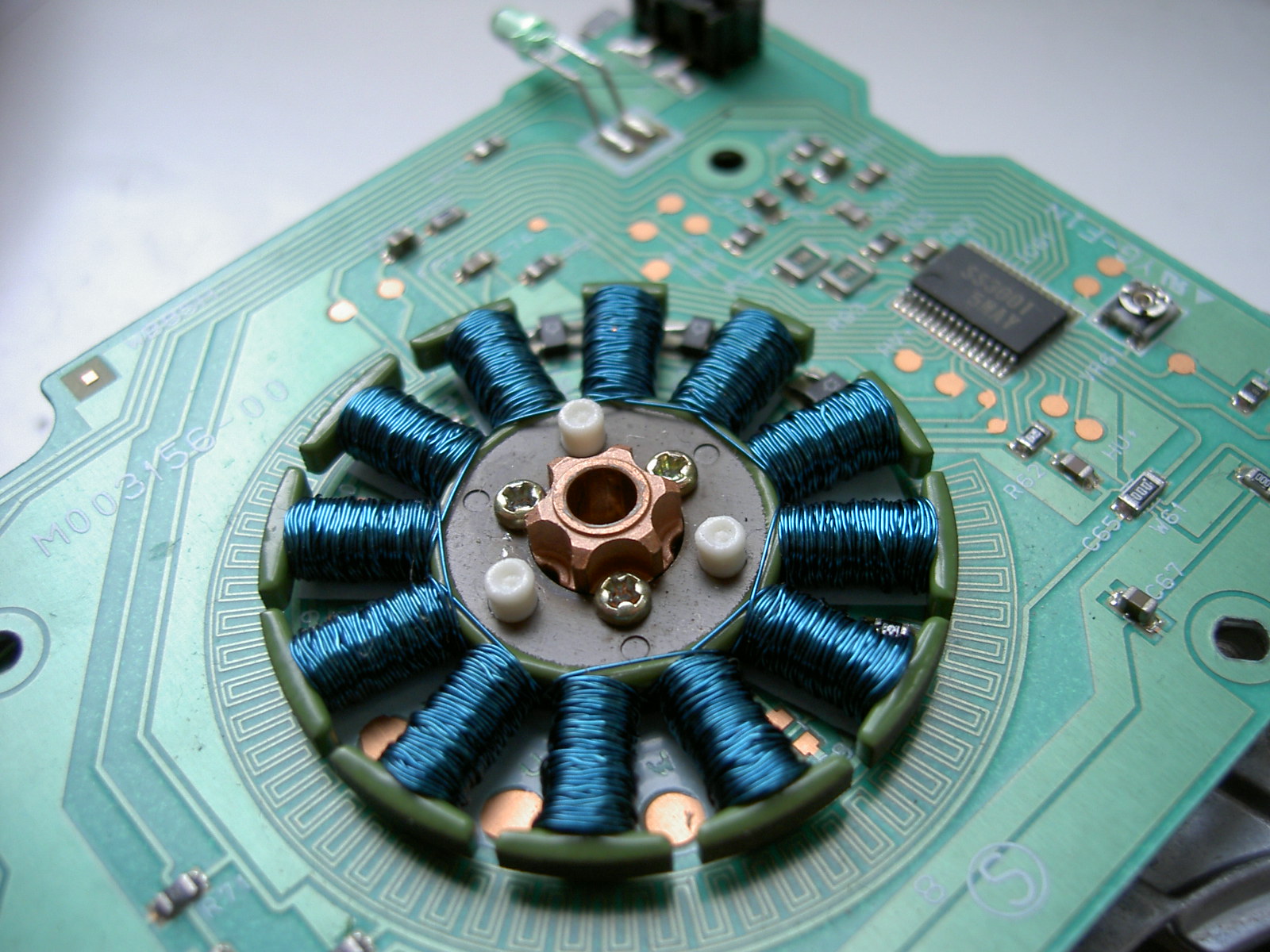 Дэн Мэлони
Дэн Мэлони
Мы в Hackaday любим те моменты, когда у нас есть возможность продолжить проект, который мы уже представили. Как правило, это потому, что проект значительно продвинулся вперед, что всегда приятно видеть. Иногда, тем не менее, доступны новые подробности оригинального проекта, и именно здесь мы оказываемся со [Скоттом Безом] и его проектом тактильной умной ручки.
Внимательные читатели могут вспомнить объявление [Скотта] об этом проекте еще в марте. Это произвело настоящий фурор, с положительными комментариями и общим «Почему я не подумал об этом?» атмосфера. И не зря; качество сборки превосходное, а идея проста, но мощна. Прикрепив ручку к валу бесщеточного двигателя постоянного тока и установив небольшой круглый ЖК-экран посередине, [Скотт] придумал устройство ввода, которое можно было перепрограммировать на лету. BLDC может обеспечивать виртуальные фиксаторы с любым интервалом, генерируя тактильную обратную связь для нажатия кнопок, а ЖК-экран может обеспечивать обратную связь с пользователем.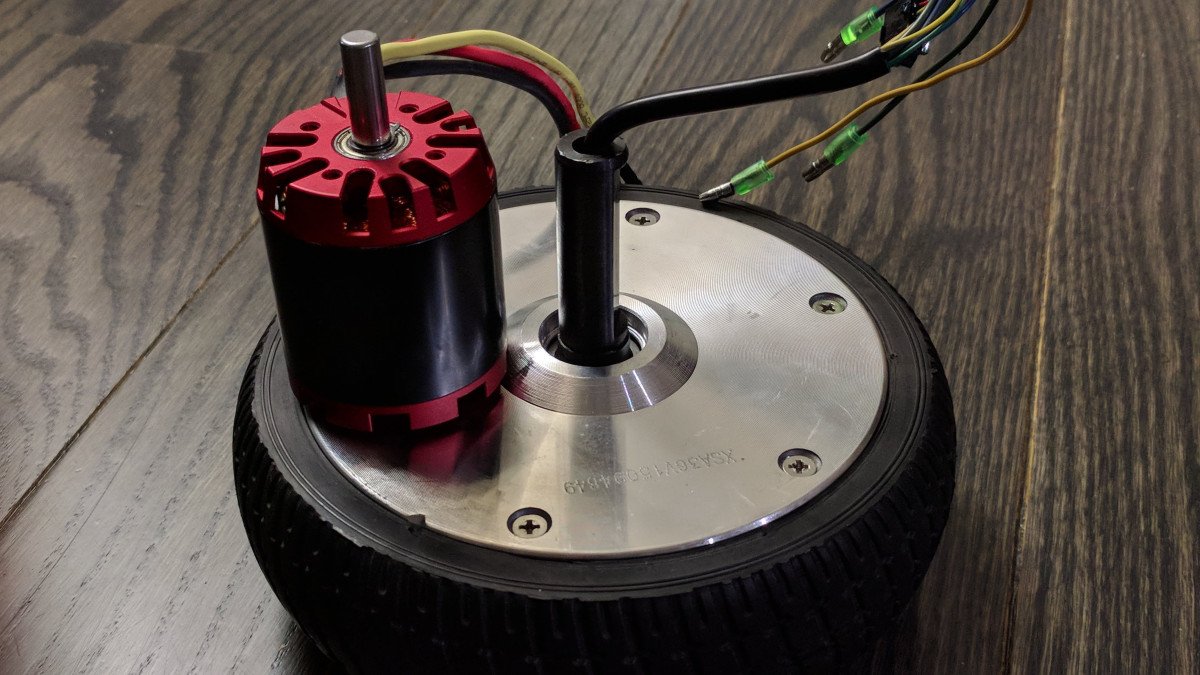
Но как такое устроено? Это тема текущего видео, в котором есть масса изящных деталей дизайна и идей по сборке. Большой проблемой для [Скотта] было поддерживать ЖК-экран в середине ручки, при этом позволяя ручке — и двигателю — вращаться. К сожалению, частью решения стал двигатель с полым валом, которого не было на складе вскоре после того, как он выпустил этот проект; надеюсь скоро появится подходящая замена. Еще одна интересная особенность — это то, как [Скотт] встроил крошечные тензометрические датчики в саму печатную плату, которые улавливают нажатия ручек, которые действуют как кнопки ввода. Мы также обнаружили, что тактильные ощущения при нажатии кнопок обеспечиваются быстрым рывком вала двигателя.
Это один из тех проектов, которые кажутся решением, ожидающим проблемы, и чем-то, что вы бы построили только из-за фактора крутости. Снимаю шляпу перед [Скоттом] за прекрасную сборку с не менее пикантными деталями.
Продолжить чтение «Углубленный взгляд на тактильную умную ручку» →
Опубликовано в Запчасти, Взломы периферийных устройствпомеченный BLDC, бесщеточный постоянный ток, тактильный, ввод, ручка, ЖК-дисплей, периферийные устройства, тензодатчик, мост Уитстона
7 апреля 2022 г. , Дэйв Раунтри
, Дэйв Раунтри
Роботизированные газонокосилки становятся обычным явлением в некоторых местах, чему способствует более низкая стоимость двигателей и необходимой управляющей электроники благодаря темпам развития современной техники. Но во многих случаях они по-прежнему кажутся довольно тупыми, немногим больше, чем вздернутый кувырок с вращающимся лезвием. [Клеменс Эльфляйн] взял дешевую тупую косилку и пересадил ей мозг на основе Raspberry Pi 4 в паре с Raspberry Pi Pico для контроля в реальном времени. [Clemens] называет это OpenMower, мотивируя это созданием контроллера робота-газонокосилки с открытым исходным кодом, поддерживающего GPS-навигацию и использующего RTK для дополнительной точности.
Роботом-донором был YardForce Classic 500, и после осмотра платы управления оказалось, что многие другие модели роботов-газонокосилок, вероятно, будут использовать тот же контроллер и, таким образом, будут совместимы с платформой openmower. На специальной материнской плате установлены Pi 4 и Pico, GPS-модуль ArduSimple RTK (обеспечивающий заявленную точность навигации 1 см), а также три драйвера двигателей BLDC для колес и ротора. Все основано на модулях, подключаемых к материнской плате, что значительно снижает сложность проекта. Для дешевой платформы косилки Yardforce имеет хорошее качество сборки, с разъемами повсюду, что делает OpenMower решением plug and play. Даже пользовательский интерфейс в верхней части газонокосилки был пригоден для использования, а на специальной печатной плате внизу было несколько кнопок в соответствующих местах.
Все основано на модулях, подключаемых к материнской плате, что значительно снижает сложность проекта. Для дешевой платформы косилки Yardforce имеет хорошее качество сборки, с разъемами повсюду, что делает OpenMower решением plug and play. Даже пользовательский интерфейс в верхней части газонокосилки был пригоден для использования, а на специальной печатной плате внизу было несколько кнопок в соответствующих местах.
Материнская плата OpenMower
Управление двигателем — любезно предоставленный проект xESC, который обеспечивает управление двигателем FOC по низкой цене, взаимодействуя с хост-контроллером через последовательный канал. Это стоит изучить само по себе! Что касается программного обеспечения, [Клеменс] использует ROS, которая реализует низкоуровневое управление роботом, планирование пути (с использованием кода, взятого из Slic3r), а также кинематические ограничения для уклонения от объектов. Видео ниже показывает, насколько просто работать с машиной — просто проведите ее по периметру газона с помощью ручного контроллера и покажите, где находятся препятствия, такие как деревья, а затем запустите ее. Косилка способна даже косить несколько газонов, совершая путешествие между ними автоматически!
Косилка способна даже косить несколько газонов, совершая путешествие между ними автоматически!
Проекты роботизированных газонокосилок здесь не новы, вот загадочный TK с интересным подходом, другой использует RTK GPS во благо (или, возможно, во вред) и, вероятно, самый дерьмовый из тех, что мы видели за последнее время, в котором используется база LoRa. -станция для передачи RTK поправок. Мы рекомендуем держаться подальше от последнего.
Читать далее «OpenMower: газонокосилка-робот с открытым исходным кодом и RTK GPS» →
Posted in Взлом роботовTagged автономная косилка, BLDC, gps, KiCAD, Raspberry Pi 4, Raspberry Pi Pico, RTK
17 марта 2022 г. Дэн Мэлони
Приближается время года, когда нам нужно начать тщательную проверку проектов здесь, в Hackaday. В конце концов, никто не любит, когда его оскорбляет ранняя первоапрельская шутка. Но как бы глупо ни выглядел этот огромный фанат ПК, он, безусловно, кажется законной сборкой, хотя и немного бессмысленной.
Опять же, возможно, бессмысленно — это слишком резкое слово. Этот 500-мм вентилятор разработан [Ангусом] в Maker’s Muse, и он представляет собой большую работу по проектированию, чтобы сделать его пригодным для сборки, а также работоспособным и (в основном) безопасным. Используя как МДФ, вырезанную на станке с ЧПУ, так и печатные детали, вентилятор представляет собой увеличенную копию корпусного вентилятора нормального размера. Каркас вентилятора должен был быть напечатан из четырех частей, которые сцепляются друг с другом с помощью хитроумных замковых соединений. Каждое из девяти лезвий фиксируется в центральной втулке прочными ласточкиными хвостами.
Прочность важна, так как вентилятор приводится в действие бесщеточным двигателем постоянного тока мощностью 1500 Вт. Благодаря редукции 4:1 благодаря печатной зубчатой передаче вентилятор вращается со скоростью около 3300 об/мин, издавая ужасающий шум. Очевидно небольшое «колебание скорости», но [Ангусу] удалось пережить испытания.