Содержание
Как подключить к частотному преобразователю однофазный двигатель?
Однофазный электродвигатель с расщепленными полюсами
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСНИРЕСПУБЛИК А 1 19) 50 4 Н 02 К 17/10 ПИСАНИЕ ИЗОБРЕТЕНИЯ ГОСУДАРСТВЕННЫЙ КОМИТЕТ ССС ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТ н двтсе скому свиДКтеЛьСт(46) 07.10.86. Бюл. В 37 (71) Ташкентский ордена Дружбы наро дов политехнический институт им. А.Р.Бируни и Московский ордена . Ленина и ордена Октябрьской Революции. энергетический институт ;(72) А.В.Иванов-Смоленский, В.А.Куз нецов и В.М.Ахматова(56) Роферов Ф,М. Электрические машины автоматических устройств. М.: Высшая школа, 196, с. 81.Авторское свидетельство СССР У 564688, кл. Н .02 К 17/04, 1977. (54) ОДНОФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С РАСЩЕПЛЕННЫМИ ПОЛЮСАМИ(57) Изобретение относится к электротехнике, а именно к однофазным асинхронным электродвигателям с расщеп» ленными полюсами, Целью изобретения является повышение энергетических показателей. Электродвигатель содержит статор с короткозамкнутыми витками, установленными на полюсных наконечниках, и ротор с прямыми пазами. Полюсный наконечник содержит часть 1, не обхваченную короткоэамкнутым: витком 2, и часть 3, обхваченную им. Сторона короткозамкнутого витка 2, размещенная в пазу напротив поверхности ротора, установлена со скосом д относительно продольной оси полюсного наконечника. Скос короткозамкнутого витка ослабляет высшие гармоническиа магнитного лотока и улуниаот а энергетические показатели,ил.ъа1 1262646 Формула изобретения Составитель В,КрасновТехредЛ.Сердюкова Корректор С.Черни Редактор О. Головач Тираж 631 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5Заказ 544/54 Производственно-полиграфическое предприятие, г. Ужгород, ул, Проектная, 4 Изобретение относится к электротехнике, в частносФ к однофазным асинхронным микродвигателям с расщепленными полюсами.Цель изобретения — повышение энергетических,показателей двигателей.На чертеже показана развертка поверхности полюсных йаконечников, обращенной к ротору.Полюсный наконечник содержит часть 1, необхваченную короткозамкнутым витком 2,и часть 3, обхваченную короткозамкнутым витком.
Полюсный наконечник содержит часть 1, не обхваченную короткоэамкнутым: витком 2, и часть 3, обхваченную им. Сторона короткозамкнутого витка 2, размещенная в пазу напротив поверхности ротора, установлена со скосом д относительно продольной оси полюсного наконечника. Скос короткозамкнутого витка ослабляет высшие гармоническиа магнитного лотока и улуниаот а энергетические показатели,ил.ъа1 1262646 Формула изобретения Составитель В,КрасновТехредЛ.Сердюкова Корректор С.Черни Редактор О. Головач Тираж 631 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5Заказ 544/54 Производственно-полиграфическое предприятие, г. Ужгород, ул, Проектная, 4 Изобретение относится к электротехнике, в частносФ к однофазным асинхронным микродвигателям с расщепленными полюсами.Цель изобретения — повышение энергетических,показателей двигателей.На чертеже показана развертка поверхности полюсных йаконечников, обращенной к ротору.Полюсный наконечник содержит часть 1, необхваченную короткозамкнутым витком 2,и часть 3, обхваченную короткозамкнутым витком.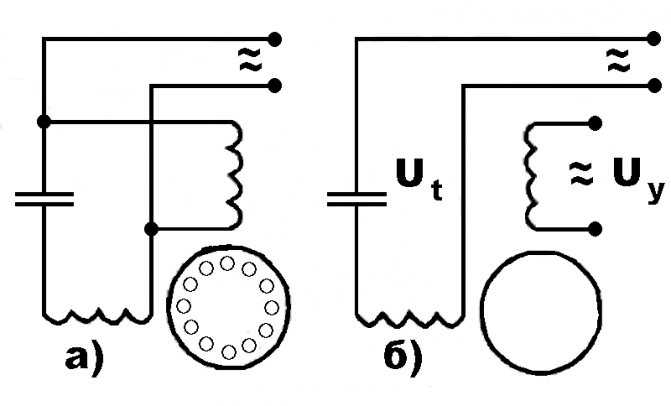 Двигатель работает следующим образом. Магнитный поток, создаваемый обмоткой возбуждения, проходя по обеим частям полюсного наконечника, наводит в короткозамкнутом витке ЭДС.,( Ток, под действием этой ЭДС, протекая по короткозамкнутому витку,. создает свой магнитный поток, сдвинутый в пространстве и во времени относительно магнитного потока, проходяще» го по части полюсного наконечника,необхваченного короткоэамкнутым витком,В двигателе из»за скоса коротко».замкнутого витка высшие гармонические магнитного потока обеих частейполюсного наконечника, ослабляются,поскольку изменяется характер нарастания магнитного потока в контурахротора. Это позволяет снизить моменО ты от высших гармоник и улучшитьэнергетические показатели двигателя. 11 Однофазный электродвигатель с расщепленными полюсами, содержащий ротор с прямыми пазами, статор с корот-, козамкнутыми витками, установленными в пазах на полюсных наконечниках, рО о т л и ч а ю щ и й с я тем, что,с целью повышения энергетических показателей, размещенная в пазу напротив поверхности ротора сторона каждого короткоэамкнутого витка установ 2 з лена са скосом относительно продольной оси полюсного наконечника.
Двигатель работает следующим образом. Магнитный поток, создаваемый обмоткой возбуждения, проходя по обеим частям полюсного наконечника, наводит в короткозамкнутом витке ЭДС.,( Ток, под действием этой ЭДС, протекая по короткозамкнутому витку,. создает свой магнитный поток, сдвинутый в пространстве и во времени относительно магнитного потока, проходяще» го по части полюсного наконечника,необхваченного короткоэамкнутым витком,В двигателе из»за скоса коротко».замкнутого витка высшие гармонические магнитного потока обеих частейполюсного наконечника, ослабляются,поскольку изменяется характер нарастания магнитного потока в контурахротора. Это позволяет снизить моменО ты от высших гармоник и улучшитьэнергетические показатели двигателя. 11 Однофазный электродвигатель с расщепленными полюсами, содержащий ротор с прямыми пазами, статор с корот-, козамкнутыми витками, установленными в пазах на полюсных наконечниках, рО о т л и ч а ю щ и й с я тем, что,с целью повышения энергетических показателей, размещенная в пазу напротив поверхности ротора сторона каждого короткоэамкнутого витка установ 2 з лена са скосом относительно продольной оси полюсного наконечника.
Смотреть
Система управления шаговым двигателем
В современном мире всё большую роль играет автоматизация процессов. Для этого необходимо преобразовывать сигналы управления в механические движения. Одним из способов достижения данной цели является использование шаговых двигателей.
Шаговый двигатель — это электромеханичское устройство, которое преобразует электрические импульсы в дискретные механические перемещения.
Преимущества применения шаговых двигателей
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель;
- если обмотки запитаны, то двигатель в режиме остановки обеспечивает полный момент;
- хорошие шаговые двигатели обеспечивают точность 3-5% от величины шага, при этом ошибка не накапливается от шага к шагу;
- возможность быстрого старта/остановки/реверсирования;
- высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников;
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи;
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора;
- может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов.


Недостатки применения шаговых двигателей
- шаговым двигателем присуще явление резонанса;
- из-за работы без обратной связи возможна потеря контроля положения, поэтому рекомендуется дополнять системы управления шаговым двигателем энкодером;
- потребление энергии не уменьшается даже без нагрузки;
- затруднена работа на высоких скоростях;
- невысокая удельная мощность;
- относительно сложная схема управления.
Применение шаговых двигателей:
- приводы осей координатных столов и манипуляторов;
- системы линейного перемещения;
- упаковочные и конвейерное оборудование;
- оборудование для текстильного и пищевого производств;
- полиграфическое оборудование;
- устройство подачи, дозирования;
- сварочные автоматы.
Принцип работы шагового двигателя
Основной принцип работы шагового двигателя заключается в следующем — двухполюсный ротор электродвигателя, сделанный из специальной магнитомягкой стали, располагается в четырехполюсном статоре.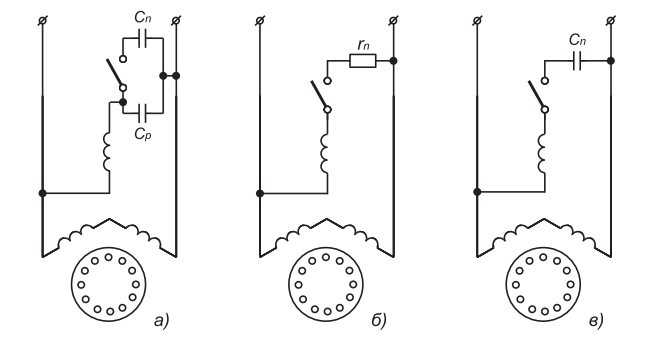 Первая полюсная пара сделана из магнитов (постоянных), на второй паре имеется обмотка управления шаговым электродвигателем. В то время, когда ток в обмотках управления отсутствует, ротор двигателя располагается вдоль магнитов и стабильно удерживается с некоторым усилием (зависящее от силы магнитного потока).
Первая полюсная пара сделана из магнитов (постоянных), на второй паре имеется обмотка управления шаговым электродвигателем. В то время, когда ток в обмотках управления отсутствует, ротор двигателя располагается вдоль магнитов и стабильно удерживается с некоторым усилием (зависящее от силы магнитного потока).
Как только осуществляется подача напряжения (постоянного) на обмотку управления шаговым электродвигателем, появляется магнитный поток, что больший магнитного потока имеющихся постоянных магнитов. Под воздействием усилия (электромагнитного) ротор начинает менять угол, стараясь войти в положение соосное с полюсами обмотки управления. Последующий импульс управления полностью отключает электрическое напряжение с обмотки управления. Вследствие этого ротор движка движется под воздействием магнитного потока магнитов.
В данной работе описывается алгоритм управления шаговыми двигателями двухфазного (биполярного) и четырёхфазного (униполярного) типа с помощью модуля управления шаговым двигателем с интерфейсом CAN ZET 7160-S StepMotor-CAN или интерфейсом RS-485 ZET 7060-S StepMotor-485.
Биполярный (двухфазный) шаговый двигатель
Двухфазный шаговый двигатель (биполярный шаговый двигатель) имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
| Рис. 1 Внутренняя схема биполярного Ш.Д. | Рис. 2 Схема выводов биполярного Ш.Д. | Рис. 3 Схема подключения биполярного Ш.Д. к ZET7X60-S |
Униполярный (четырёхфазный) шаговый двигатель
Четырёхфазный шаговый двигатель (униполярный шаговый двигатель) также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов.
Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов.
| Рис. 4 Внутренняя схема униполярного Ш.Д. | Рис. 5 Схема выводов униполярного Ш.Д. | Рис. 6 Схема подключения униполярного Ш.Д. к ZET7X60-S |
Режимы работы шагового двигателя
Существует несколько способов управления фазами шагового двигателя. Наиболее распространёнными из них являются полношаговый и полушаговый режим. Существуют также режимы управления с 1/4, 1/8, 1/16 шага. Но эти режимы нужны только для узкого круга задач, и они требуют значительного усложнения схемы микроконтроллера и алгоритма управления. Ниже приводится последовательность генерируемых импульсов для различных режимов работы шагового двигателя, на примере униполярного двигателя.
Рис. 7 Полношаговый режим, с 1-ой активной обмоткой на каждом шаге
Рис. 8 Полношаговый режим, с 2-мя активными обмотками на каждом шаге
Рис. 9 Полушаговый режим
Разгон и торможение шагового двигателя
Такой параметр шагового двигателя, как зависимость момента от скорости является важнейшим при выборе типа двигателя, выборе метода управления фазами и выборе схемы драйвера. При конструировании высокоскоростных драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (рис. 10а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения (рис. 10б).
10б).
Рис. 10 Зависимость тока в обмотках Ш.Д. от частоты
Таким образом, для работы с шаговым двигателем на большой скорости необходимо выполнять его разгон и замедление, в противном случае произойдёт потеря синхронности между шаговым двигателем и контроллером, и положение ротора шагового двигателя будет утеряно.
Управление шаговым двигателем с помощью модуля ZET7X60-S StepMotor
Перед началом работы с шаговым двигателем необходимо выставить необходимые параметеры на вкладке «Настройки»:
- Частота опроса — частота, с которой будет обновляться информация в канале о количестве проделанных шагов;
- Тип двигателя — тип двигателя, подключенного к модулю ZET 7X60-S StepMotor.
После этого с помощью вкладки «Управление» можно начинать управление шаговым двигателем.
- Старт/Стоп — начать /остановить движение шагового двигателя;
- Направление вращения — задаём направление вращения шагового двигателя, по или против часовой стрелки;
- Кол-во шагов до остановки — количество шагов, которое проделает шаговый двигатель после запуска;
- Время одного шага — скорость вращения шагового двигателя.

| Рис. 11 Вкладка «Настройки» в программе MODBUS-ZETLAB | Рис. 12 Вкладка «Управление» в программе MODBUS-ZETLAB |
Во время выполнения команды, контроллер сообщает о количестве проделанных шагов на данный момент с частотой заданной в настройках (Настройки —> Частота опроса).
Рис. 13 Отображение количества проделанных шагов в программе ZETLAB «Многоканальный осциллограф»
Система управления шаговым двигателем с обратной связью
Система управления шаговым двигателем с обратной связью строится на базе модуля управления шаговым двигателем ZET 7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN) и интеллектуального энкодера ZET 7060-E Encoder-485 (ZET 7160-E Encoder-CAN). Для подключения к системе ZETLAB
используется преобразователь интерфейса ZET 7070. Управление шаговым двигателем осуществляется подачей сигналов с модуля ZET7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN).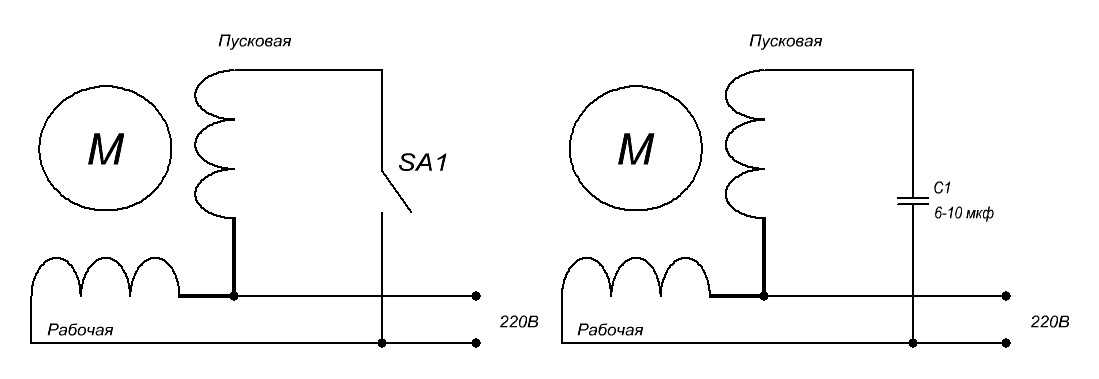 Контроль состоянием шагового двигателя осуществляется энкодером, сигнал с которого обрабатывается модулем ZET 7060-E Encoder-485 (ZET 7160-E Encoder-CAN). Обработка сигналов с интеллектуального энкодера и программное управление модулем ZET7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN) осуществляется с помощью программного обеспечения
Контроль состоянием шагового двигателя осуществляется энкодером, сигнал с которого обрабатывается модулем ZET 7060-E Encoder-485 (ZET 7160-E Encoder-CAN). Обработка сигналов с интеллектуального энкодера и программное управление модулем ZET7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN) осуществляется с помощью программного обеспечения
ZETLAB
.
Схема системы управления шаговым двигателем с обратной связью
Состав системы управления шаговым двигателем с обратной связью
| Описание |
| Управляющий модуль ZET 7060-S StepMotor-485 или ZET 7160-S StepMotor-CAN Цифровой модуль управления шаговым двигателем с интерфейсом RS-485 или CAN. |
| Датчик углового перемещения Преобразование углового перемещения в последовательность электрических сигналов, содержащих информацию о величине и направлении этого перемещения. Диаметр корпуса 50 мм. Разрешающая способность до 320000 дискрет на оборот. |
Измерительный модуль ZET 7060-E Encoder-485 или ZET 7160-E Encoder-CAN Преобразование сигнала с датчика в значения углового перемещения и передача этих данных по протоколу Modbus по интерфейсу RS-485 или CAN 2.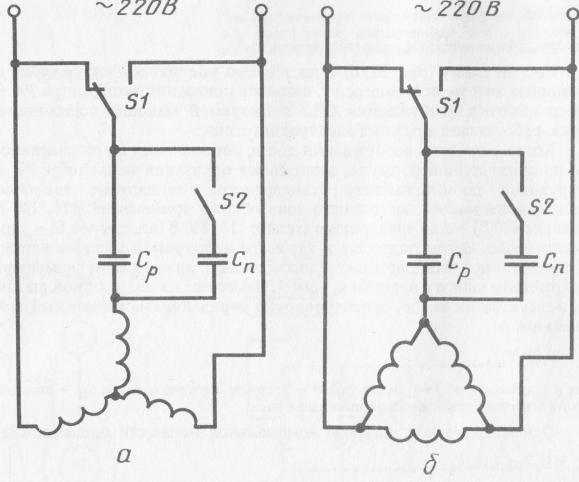 0. 0. |
| ZET 7070 RS-485↔USB или ZET 7174 CAN-USB Модуль передачи данных с измерительных модулей на ПК |
| MODBUS OPC Сервер Программа «Сервер данных интеллектуальных датчиков» |
| Кабели для подключения измерительных и управляющих модулей к ZET 7070 или ZET 7174 |
| Программное обеспечение ZETLAB Программы для отображения результатов измерений интеллектуальных датчиков в численном и графическом виде на плоскости и в объеме. |
| SCADA ZETVIEW Графическая среда разработки приложений для автоматизации измерений |
Однофазный асинхронный двигатель
Фактически, любой асинхронный электродвигатель является трехфазным и предусматривает подключение к трехфазной сети с напряжением 380 В. Однофазным или двухфазным его называют при подключении к однофазной электросети с напряжением 200 В, когда питание подается лишь на две обмотки. В такой схеме на основную рабочую обмотку подается чистая фаза от сети, а на другую питание идет через фазосдвигающий элемент, как правило, конденсатор. Такая схема позволяет создать необходимую индукцию для смещения ротора и запустить асинхронный двигатель от однофазной сети. Для дальнейшей его работы даже необязательно, чтобы пусковая обмотка (которую подключают через конденсатор) оставалась под напряжением.
Такая схема позволяет создать необходимую индукцию для смещения ротора и запустить асинхронный двигатель от однофазной сети. Для дальнейшей его работы даже необязательно, чтобы пусковая обмотка (которую подключают через конденсатор) оставалась под напряжением.
Дело в том, что трехфазный асинхронный двигатель продолжает функционировать (под малой нагрузкой) даже если во время работы от него отключить подачу энергии по одному из питающих проводов, сымитировав таким образом работу от однофазной сети. Это обусловлено тем, что результирующее магнитное поле сохраняет вращение.
Асинхронный двухфазный электродвигатель
Двухфазные асинхронные двигатели: а — с короткозамкнутым ротором; б — с полым ротором
Схема подключения второй обмотки через резистор
Вращающиеся магнитные поля могут быть созданы и двухфазными обмотками, если эти обмотки пространственно смещены на 90° друг относительно друга. Если эти обмотки питать двумя токами, смещёнными на 90° по фазе, то получается, как и в трехфазном электродвигателе, вращающееся магнитное поле.
В двухфазном электродвигателе создается вращающий момент, обусловленный токами, вызванными вращающимся магнитным полем в стержнях ротора электродвигателя. Ротор получает ускорение до тех пор, пока он — как и в трёхфазном асинхронном двигателе — не достигнет определенной конечной частоты вращения, которая ниже частоты вращения поля.
Если обе обмотки статора питать от одной и той же сети однофазного тока, то сдвиг фазы в одной из обмоток, необходимый для получения вращающегося поля, может быть реализован последовательным включением конденсатора с достаточной емкостью[1]. На рисунке показана схема двухфазного асинхронного двигателя с конденсатором при питании от сети переменного тока.
Сдвиг фазы в одной из обмоток можно получить и последовательным включением резистора, но в этом случае увеличиваются потери активной мощности. Также сдвиг фазы получается, если взамен внешнего резистора на полюсе (или полюсах) одной из обмоток размещается короткозамкнутый виток. В этом случае увеличиваются потери активной мощности в соответствующей обмотке, зато исключается внешний резистор. Такие двигатели обычно имеют небольшую мощность и используются, например, в бытовых вентиляторах[2].
Такие двигатели обычно имеют небольшую мощность и используются, например, в бытовых вентиляторах[2].
В настоящее время расширилась сфера применения двухфазного асинхронного двигателя в виде электродвигателя с полым ротором. В таком электродвигателе вместо обычного короткозамкнутого ротора применяется алюминиевый цилиндр, который может вращаться в воздушном зазоре между внешним и внутренним статорами.
Вращающееся поле вызывает в алюминиевом цилиндре вихревые токи, которые, взаимодействуя с магнитным полем в воздушном зазоре, создают вращающий момент. Цилиндр достигает конечной асинхронной частоты вращения, которая соответствует нагрузке на валу.
Небольшой момент инерции ротора электродвигателя обусловливает благоприятные рабочие характеристики. Электродвигатели с полым ротором рассчитаны прежде всего на небольшие мощности и применяются для автоматического регулирования в компенсационных и мостовых схемах. Одна из обмоток вместе с конденсатором подключается к сети с напряжением, а на вторую обмотку подается управляющее напряжение.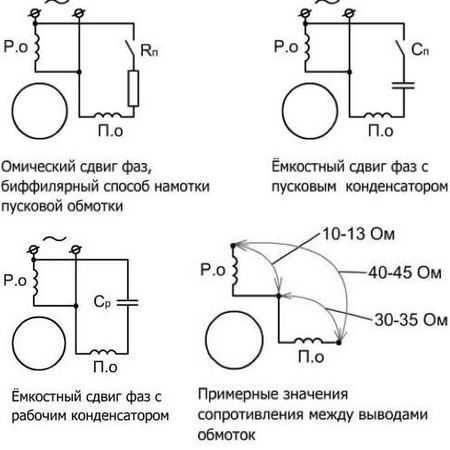
Подключение преобразователя частоты и однофазного двигателя
В такой схеме есть ряд существенных недостатков:
- Запуск двигателя происходит при минимальной частоте 30 Гц;
- Частоту ниже 30 Гц можно регулировать, но не рекомендуется, очень вредно для движка;
- Есть нюанс с настройкой пускового напряжения, требуется немного загрублять параметр;
Для решения вопроса с подключением двух устройств поможет нам обычный дроссель. Катушка индуктивности поможет нам подавить ёмкость в схеме, таким образом давая возможность частотнику спокойно подавать синусоиду на движок. Да, вот схема:
Всё элементарно, правда. Видео, к сожалению не сохранилось. Выкладываю фото с ПЧ Eaton и однофазным насосом.
Производителей ПЧ в мире очень много. Поэтому из настроек я могу направить вас примерно и в общих чертах, если будут возникать проблемы с подключениями. Основная мысль заключается в том, что при пуске двигателя минимальное напряжение и частоту поднять вверх.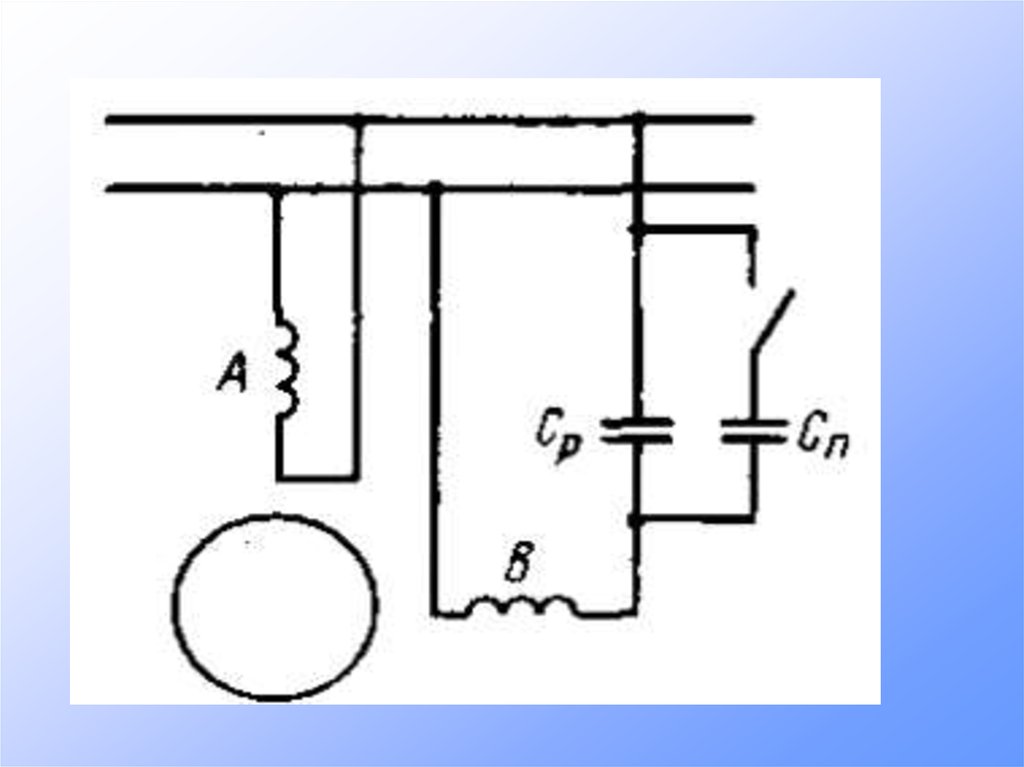 Но делать это нужно осторожно и аккуратно, есть шанс спалить мотор.
Но делать это нужно осторожно и аккуратно, есть шанс спалить мотор.
И еще рекомендую ограничить минимальную частоту на 30 Гц, чтобы не допустить запуска вхолостую и перегрева. Двигатель начинает сильно греться, при пуске на низких частотах.
На этом у меня всё, друзья…
Мне очень нравится кататься на велосипеде. Ещё больше — модернизировать, добавлять что-то новое и интересное. Я совсем недавно в просторах интернета нашёл комплект электромотора для заднего колеса. Комплекты существуют, как и для переднего колеса, так и для заднего:
Загорелся идеей поставить и на свой велобайк. Может кто сталкивался? Кто-то ставил? Хочу увидеть ваше мнение… Пишите в комментариях.
Надеюсь моя статья помогла вам определиться с выбором подключения однофазного двигателя? Если что-то не дописал, напишите в комментариях, исправлю…)
P.S. Небольшой анонс следующей статьи:
Широкая доступность фотоустройств породила новую проблему — потребность в эффективных инструментах цифрового монтажа. На этом рынке традиционно доминирует профессиональный графический пакет Adobe Photoshop. Но, не стоит ограничивать свой кругозор только им. Существует огромное количество достойных фоторедакторов, покрывающих 90% повседневных нужд фотографов-любителей.
На этом рынке традиционно доминирует профессиональный графический пакет Adobe Photoshop. Но, не стоит ограничивать свой кругозор только им. Существует огромное количество достойных фоторедакторов, покрывающих 90% повседневных нужд фотографов-любителей.
Спасибо за то, что читаете мои статьи! Всего вам доброго!!
С уважением, Гридин Семён
Преобразователь частоты переменного тока уже много лет применяются при строительстве электромеханических приборов и агрегатов. Они позволяют модулировать частоту для того, чтобы регулировать скорость вращения вола электрического двигателя.
Частотники позволили подключать трёхфазный электрический двигатель к однофазной сети питания, при этом, не теряя мощности. При старинном типе подключения, через емкий конденсатор, большая часть мощности двигателя терялась, КПД существенно снижалось, обмотки электрического двигателя сильно перегревались.
Всех этих проблем удалось избежать, применением частотного преобразователя. При этом очень важно соблюдать правильное подключение частотного преобразователя к электрическому двигателю.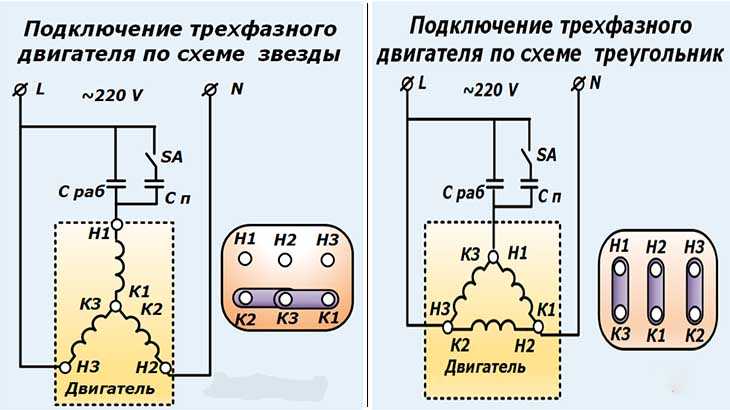
Некоторые особенности подключения любого частотника в связку с электрическим двигателем.
Однофазный электродвигатель: схема правильного подключения
Электродвигатели однофазные 220В широко используются в разнообразном промышленном и бытовом оборудовании: насосах, стиральных машинах, холодильниках, дрелях и обрабатывающих станках.
Разновидности
Существуют две наиболее востребованных разновидности этих устройств:
- Коллекторные.
- Асинхронные.
Последние по своей конструкции более просты, однако обладают рядом недостатков, среди которых можно отметить трудности с изменением частоты и направления вращения ротора.
Устройство асинхронного двигателя
Мощность данного двигателя зависит от конструктивных особенностей и может варьироваться от 5 до 10 кВт. Его ротор представляет короткозамкнутую обмотку – алюминиевые или медные стержни, которые замкнуты с торцов.
Взрывозащищенные электродвигатели: типы и описание
Взрывозащищенные электродвигатели используются в средах, где имеются легковоспламеняемые газо- и.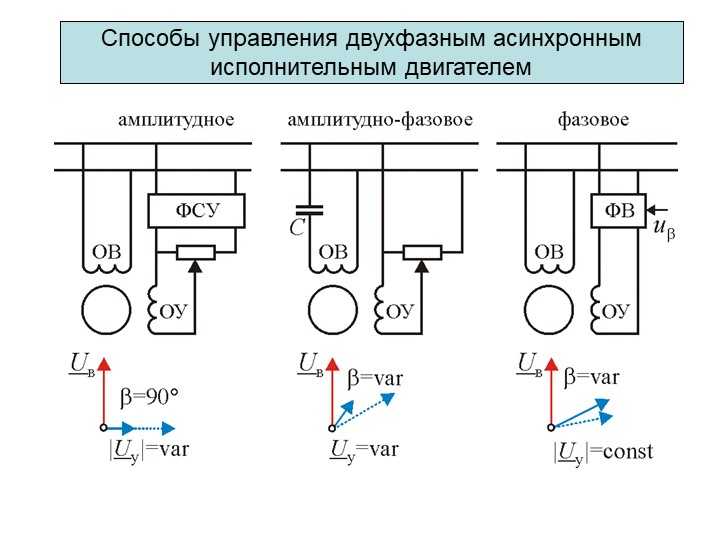 ..
..
Как правило, электродвигатель асинхронный однофазный оборудован двумя смещенными на 90° относительно друг друга обмотками. При этом главная (рабочая) занимает существенную часть пазов, а вспомогательная (пусковая) – оставшуюся. Свое название электродвигатель асинхронный однофазный получил лишь потому, что он имеет только одну рабочую обмотку.
Принцип работы
Протекающий по главной обмотке переменный ток создает магнитное периодически меняющееся поле. Оно состоит из двух кругов одинаковой амплитуды, вращение которых происходит навстречу друг другу.
В соответствии с законом электромагнитной индукции, меняющийся в замкнутых витках ротора магнитный поток образует индукционный ток, который взаимодействует с полем, порождающим его. Если ротор находится в неподвижном положении, моменты сил, действующих на него, одинаковы, в результате он остается неподвижным.
Синхронные электродвигатели: устройство, схема
Особенностью синхронных электродвигателей является то, что у магнитного потока и ротора скорости. ..
..
При вращении ротора, нарушится равенство моментов сил, так как скольжение его витков по отношению к вращающимся магнитным полям станет разным. Таким образом, действующая на роторные витки от прямого магнитного поля сила Ампера будет существенно больше, чем со стороны обратного поля.
В витках ротора индукционный ток может возникать только в результате пересечения ими силовых линий магнитного поля. Их вращение должно осуществляться со скоростью, чуть меньше частоты вращения поля. Собственно отсюда и пошло название асинхронный однофазный электродвигатель.
Вследствие увеличения механической нагрузки уменьшается скорость вращения, возрастает индукционный ток в роторных витках. А также повышается механическая мощность двигателя и переменного тока, который он потребляет.
Схема подключения и запуска
Естественно, что вручную раскручивать при каждом запуске электродвигателя ротор неудобно. Поэтому для обеспечения первоначального пускового момента применяется пусковая обмотка.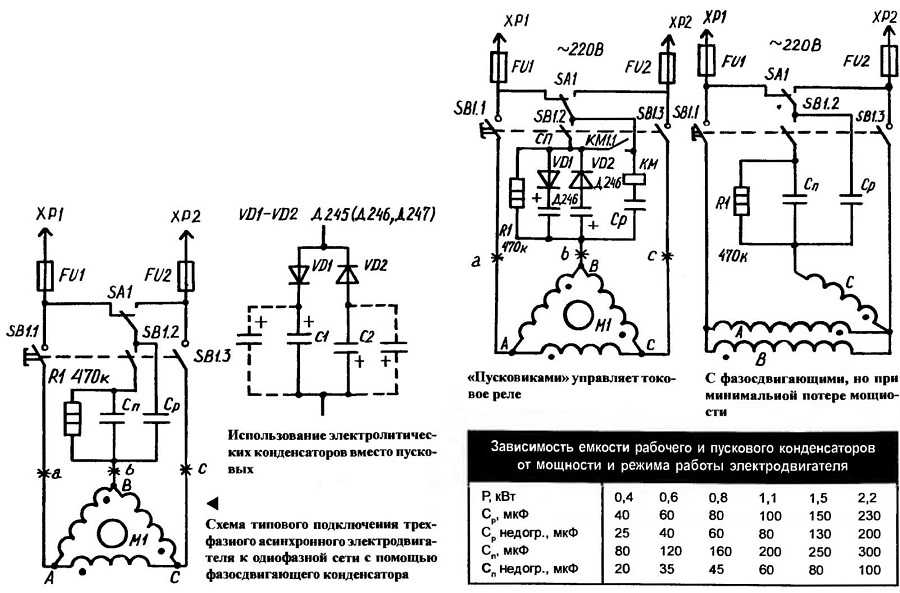 Так как она составляет прямой угол с рабочей обмоткой, для образования вращающегося магнитного поля на ней должен быть сдвинут по фазе ток относительно тока в рабочей обмотке на 90°.
Так как она составляет прямой угол с рабочей обмоткой, для образования вращающегося магнитного поля на ней должен быть сдвинут по фазе ток относительно тока в рабочей обмотке на 90°.
Этого добиться можно посредством включения в цепь фазосмещающего элемента. Дроссель или резистор не могут обеспечить сдвиг фазы на 90°, поэтому целесообразней в качестве фазосмещающего элемента использовать конденсатор. Такая схема однофазного электродвигателя обладает отличными пусковыми свойствами.
Вентильные электродвигатели: принцип действия….
Вентильные двигатели имеют массу преимуществ. Модели данного типа отличаются высоким коэффициентом…
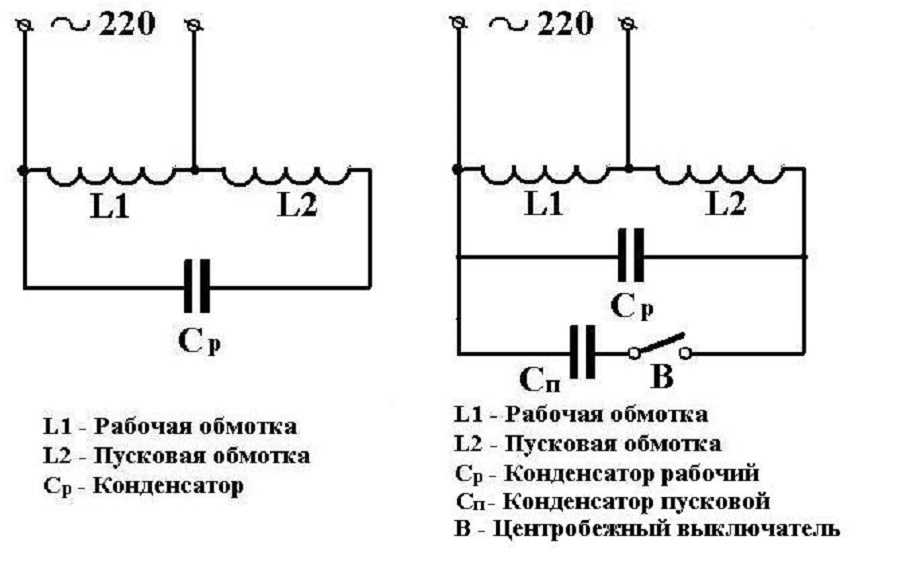
Если в качестве фазовращающего элемента выступает конденсатор, электродвигатель конструктивно может быть представлен:
- С рабочим конденсатором.
- С пусковым конденсатором.
- С рабочим и пусковым конденсатором.
Наиболее распространенным является второй вариант. В таком случае предусмотрено недолгое подключение пусковой обмотки с конденсатором.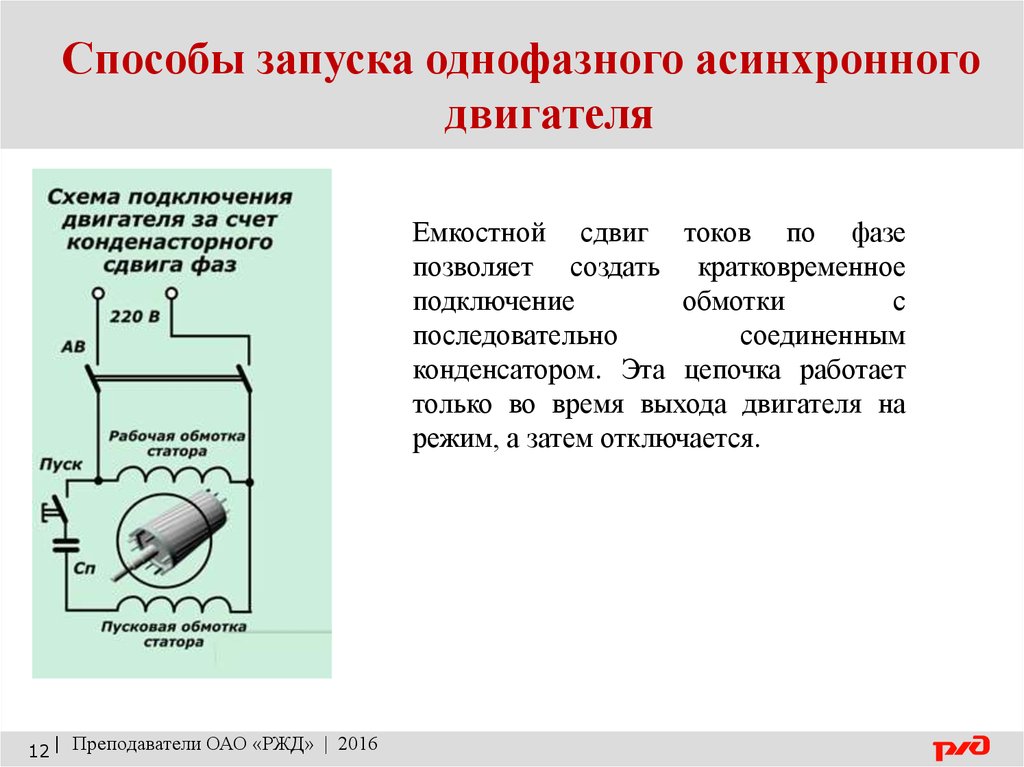 Это происходит только на время пуска, затем они отключаются. Реализовать такой вариант можно при помощи реле времени или посредством замыкания цепи при нажатии пусковой кнопки.
Это происходит только на время пуска, затем они отключаются. Реализовать такой вариант можно при помощи реле времени или посредством замыкания цепи при нажатии пусковой кнопки.
Подобная схема подключения однофазного электродвигателя характеризуется довольно невысоким пусковым током. Однако в номинальном режиме параметры низкие по причине того, что поле статора – эллиптическое (оно сильнее в направлении полюсов).
Схема с постоянно включенным рабочим конденсатором в номинальном режиме работает лучше, при этом пусковые характеристики имеет посредственные. Вариант с рабочим и пусковым конденсатором, по сравнению с двумя предыдущими, является промежуточным.
Коллекторный двигатель
Рассмотрим однофазный электродвигатель коллекторного типа. Это универсальное оборудование может питаться от источников постоянного или переменного тока. Его часто используют в электрических инструментах, стиральных и швейных машинах, мясорубках – там, где требуется реверс, его вращение с частотой свыше 3000 оборотов в минуту или регулировка частоты.
Обмотки ротора и статора электродвигателя соединяются последовательно. Ток подводится посредством щеток, соприкасающихся с пластинами коллектора, к которым подходят концы обмоток ротора.
Осуществление реверса происходит за счет изменения полярности подключения ротора или статора в электрическую сеть, а скорость вращения регулируется посредством изменения в обмотках величины тока.
Недостатки
Коллекторный однофазный электродвигатель имеет следующие недостатки:
- Создание радиопомех, трудное управление, значительный уровень шума.
- Сложность оборудования, практически невозможно произвести его ремонт самостоятельно.
- Высокая стоимость.
Подключение
Чтобы электродвигатель в однофазной сети был подключен должным образом, необходимо соблюдать определенные требования. Как уже было сказано, существует целый ряд двигателей, способных функционировать от однофазной сети.
Перед подключением важно убедиться в том, что частота и напряжение сети, указанные на корпусе, соответствуют главным параметрам электрической сети.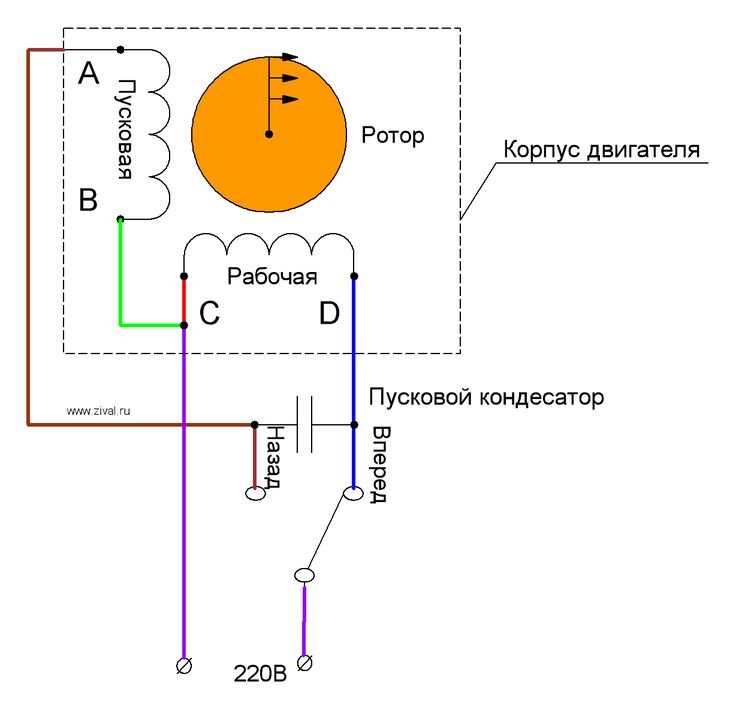 Все работы по подключению необходимо производить только при обесточенной схеме. Также следует избегать заряженных конденсаторов.
Все работы по подключению необходимо производить только при обесточенной схеме. Также следует избегать заряженных конденсаторов.
Как подключить однофазный электродвигатель
Для подключения двигателя необходимо соединить последовательно статор и якорь (ротор). Клеммы 2 и 3 соединяются, а две другие нужно подключить в цепь 220B.
По причине того, что электродвигатели однофазные 220В функционируют в цепи переменного тока, в магнитных системах возникает магнитный переменный поток, что провоцирует образование вихревых токов. Именно поэтому магнитную систему статора и ротора выполняют из электротехнических стальных листов.
Подключение без регулирующего блока с электроникой может привести к тому, что в момент запуска образуется значительный пусковой ток, и в коллекторе произойдет искрение. Изменение направления вращения якоря выполняется посредством нарушения последовательности подключения, когда меняются местами выводы якоря или ротора. Главным недостатком этих двигателей считается присутствие щеток, которые следует заменять после каждой длительной эксплуатации оборудования.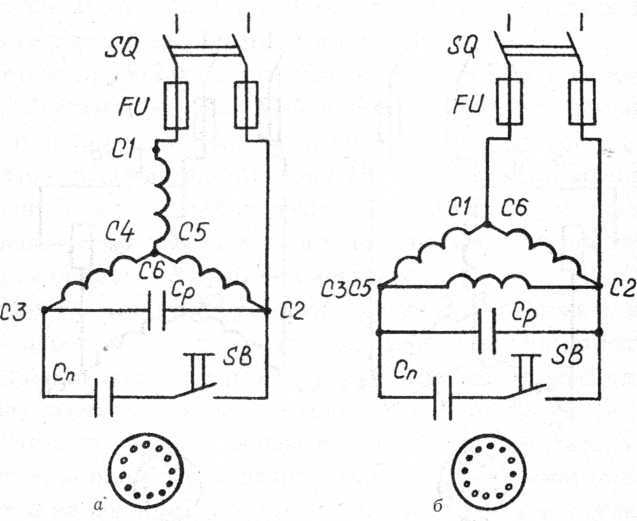
Таких проблем в асинхронных электродвигателях не существует, так как в них отсутствует коллектор. Магнитное поле ротора образуется без электрических связей за счет внешнего магнитного поля статора.
Подключение через магнитный пускатель
Рассмотрим, как можно подключить однофазный электродвигатель через магнитный пускатель.
1. Итак, в первую очередь необходимо выбрать магнитный пускатель по току таким образом, чтобы его контактная система выдерживала нагрузку электрического двигателя.
2. Пускатели, к примеру, делятся на величину от 1 до 7, и чем больше данный показатель, тем больший ток выдерживает контактная система этих устройств.
- 10A – 1.
- 25A – 2.
- 40A – 3.
- 63A – 4.
- 80A – 5.
- 125A – 6.
- 200A – 7.
3. После того как была определена величина пускателя, необходимо обратить внимание на катушку управления. Она может быть на 36B, 380B и 220B. Желательно остановиться на последнем варианте.
4. Далее, собирается схема магнитного пускателя, и подключается силовая часть. На разомкнутые контакты выполняется ввод 220B, на выход силовых контактов пускателя подключается электродвигатель.
Далее, собирается схема магнитного пускателя, и подключается силовая часть. На разомкнутые контакты выполняется ввод 220B, на выход силовых контактов пускателя подключается электродвигатель.
5. Подключаются кнопки «Стоп – Пуск». Их питание осуществляется от ввода силовых контактов пускателя. К примеру, фаза соединяется с кнопкой «Стоп» замкнутого контакта, затем с нее переходит на пусковую кнопку разомкнутого контакта, а с контакта кнопки «Пуск» – на один из контактов катушки магнитного пускателя.
6. На второй вывод пускателя подключается «ноль». Чтобы зафиксировать включенное положение магнитного пускателя, необходимо шунтировать пусковую кнопку замкнутого контакта к блоку контактов пускателя, подающего питание с кнопки «Стоп» на катушку.
Зачем нужен конденсатор для однофазного двигателя?
Однофазному асинхронному двигателю требуется конденсатор в цепи во время пуска для создания пускового момента. Без конденсатора однофазный конденсаторный пусковой асинхронный двигатель не может работать. Другие однофазные асинхронные двигатели, например, с экранированными полюсами и реактивного типа, не требуют конденсатора для запуска. В этой статье мы обсудим, как конденсатор помогает в создании пускового момента в однофазном двигателе с пусковым конденсатором.
Другие однофазные асинхронные двигатели, например, с экранированными полюсами и реактивного типа, не требуют конденсатора для запуска. В этой статье мы обсудим, как конденсатор помогает в создании пускового момента в однофазном двигателе с пусковым конденсатором.
Однофазный двигатель не является самозапускающимся. Двигатель может вращаться, если он создает вращающий момент. Генерация вращающего момента происходит, когда двигатель создает вращающееся магнитное поле. В принципе, трехфазный асинхронный двигатель способен генерировать вращающееся магнитное поле. В отличие от этого, однофазный двигатель не способен генерировать вращающееся магнитное поле и не может запустить свое собственное. Однофазный двигатель создает вращающееся поле и не может создавать вращающий момент.
Вал однофазного двигателя, если его однажды провернуть вручную после включения питания, может создать крутящий момент, и двигатель начнет непрерывно вращаться. Однако при каждом пуске двигателя ручной удар по валу является обязательным для вращения двигателя.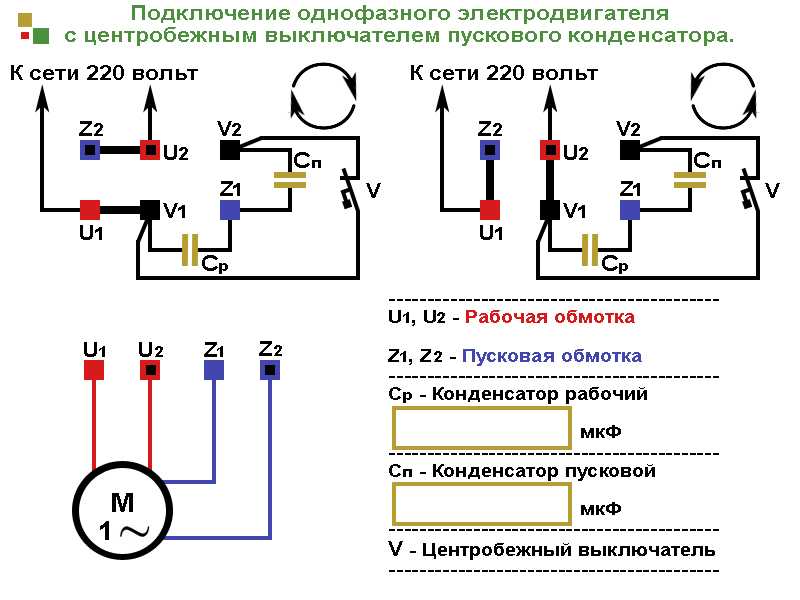
Метод разделения фаз разделяет питание фаз. Таким образом, такое разделение фаз создает фазовый сдвиг между двумя фазами, равный 90 электрическим градусам. в космосе. Чтобы добиться смещения фаз на 90 градусов, две обмотки расположены по 90 градусов в космосе физически.
Конденсатор, используемый последовательно с другой вспомогательной обмоткой, в основном обеспечивает сдвиг фаз на 90 градусов. Вспомогательная обмотка также называется пусковой обмоткой, потому что она помогает запустить двигатель, когда мы подключаем ее последовательно с конденсатором. На следующей схеме показаны пусковая и рабочая обмотки однофазного двигателя.
Напряжение пусковой и рабочей обмотки имеет сдвиг фаз на 90 градусов. На следующей диаграмме показано смещение фаз между этими двумя обмотками.
Значение емкости однофазного асинхронного двигателя пропорционально номинальной мощности двигателя. Формула для расчета размера конденсатора выглядит следующим образом.
Пример
Рассчитайте значение емкости для однофазного асинхронного двигателя.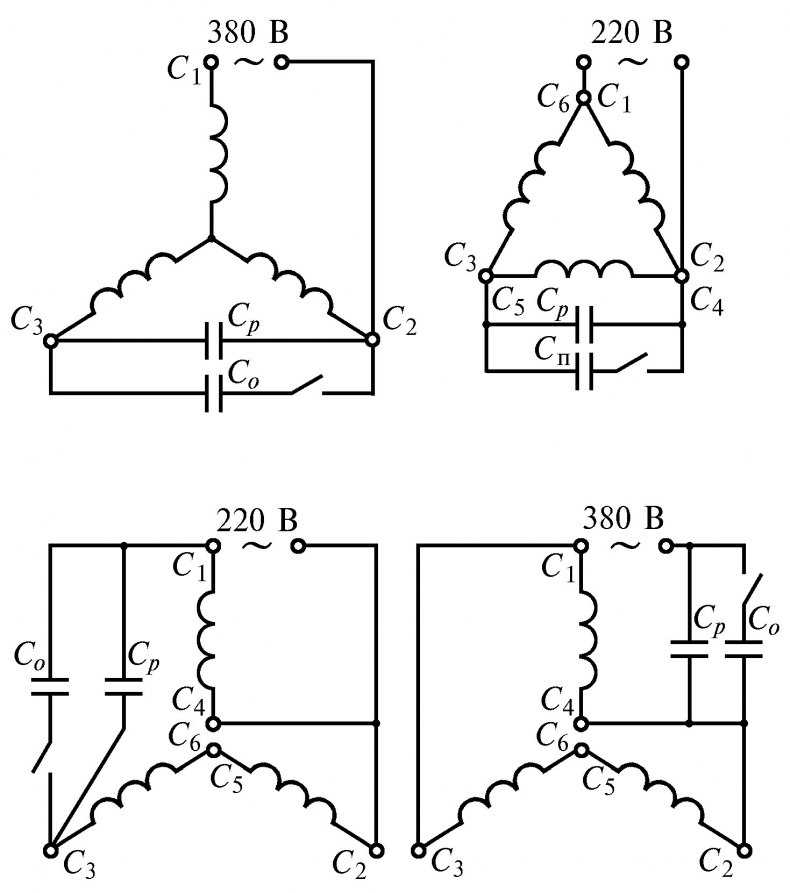 Данные асинхронного двигателя: мощность 125 Вт, напряжение питания 230 В, 50 Гц, КПД 90%.
Данные асинхронного двигателя: мощность 125 Вт, напряжение питания 230 В, 50 Гц, КПД 90%.
Обратите внимание, что номинальное напряжение конденсатора должно составлять 440 вольт для источника питания 230 вольт однофазного асинхронного двигателя.
В следующей таблице показано значение емкости для однофазных (230 В) двигателей различной мощности. 0031
900 28 440
9009 8
Читать Далее
Похожие сообщения:
Пожалуйста, подпишитесь на нас и поставьте лайк:
сообщите об этом объявлении
Классификация электродвигателей по применению, технологии и NEMA
Связанные ресурсы: двигатели
Классификация электродвигателей по применению, технологии и NEMA
Электродвигатели, генераторы и приводы
Классификация электродвигателей по применению и технологии
9000 2 Двигатели переменного тока :
Электродвигатели переменного тока бывают трех основных типов: асинхронные, синхронные и с последовательным возбуждением.
определяется следующим образом.
Асинхронный двигатель NEMA :
Асинхронный двигатель — это асинхронная машина, в которой первичная обмотка на одном элементе (обычно
статор) подключается к источнику питания, а многофазная вторичная обмотка или короткозамкнутая обмотка
вторичная обмотка другого элемента (обычно ротора) несет наведенный ток.
Асинхронный двигатель с короткозамкнутым ротором NEMA :
Асинхронный двигатель с короткозамкнутым ротором представляет собой асинхронный двигатель, в котором вторичная цепь (беличья клетка
обмотка) состоит из ряда токопроводящих стержней, концы которых соединены металлическими кольцами или
пластины на каждом конце.
Асинхронный двигатель с фазным ротором NEMA :
Асинхронный двигатель с фазным ротором представляет собой асинхронный двигатель, в котором вторичная цепь состоит из
многофазная обмотка или катушки, выводы которых либо закорочены, либо замкнуты посредством соответствующих цепей.
Синхронный двигатель NEMA :
Синхронный двигатель представляет собой синхронную машину для использования в качестве двигателя.
NEMA Синхронный двигатель с возбуждением постоянным током :
Если не указано иное, обычно считается, что полюса возбуждения синхронного двигателя возбуждаются
постоянный ток.
NEMA Синхронный двигатель с постоянными магнитами :
Синхронный двигатель с постоянными магнитами представляет собой синхронный двигатель, в котором возбуждение возбуждения обеспечивается
с помощью постоянных магнитов.
NEMA Реактивный синхронный двигатель :
Реактивный синхронный двигатель представляет собой синхронный двигатель, аналогичный по конструкции асинхронному двигателю.
что элемент, несущий вторичную цепь, имеет циклическое изменение сопротивления, обеспечивающее эффект
явными полюсами, без постоянных магнитов или возбуждения постоянным током. Он запускается как асинхронный двигатель, т.
обычно снабжен короткозамкнутой обмоткой, но работает нормально на синхронной скорости.
Буквенные обозначения многофазных двигателей с короткозамкнутым ротором средних размеров
NEMA Design A :
Конструкция A Двигатель представляет собой двигатель с короткозамкнутым ротором, рассчитанный на то, чтобы выдерживать пуск и развитие при полном напряжении.
крутящий момент заблокированного ротора при 60 Гц и 50
герц и имеющие проскальзывание при номинальной нагрузке менее 5 процентов.
NEMA Дизайн B :
Двигатель конструкции B представляет собой двигатель с короткозамкнутым ротором, рассчитанный на пуск при полном напряжении, развивающий блокировку ротора,
пробивной и тяговый крутящие моменты, достаточные для общего применения при 60 Гц и 50
герц и имеющие проскальзывание при номинальной нагрузке менее 5 процентов.
NEMA Дизайн C :
Двигатель конструкции C представляет собой двигатель с короткозамкнутым ротором, рассчитанный на то, чтобы выдерживать запуск при полном напряжении, развивая блокировку ротора.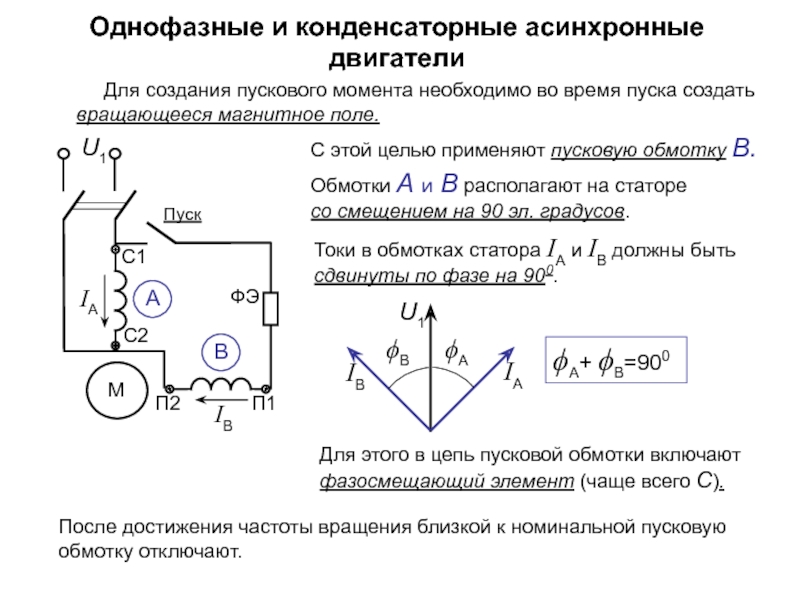
крутящий момент для специального применения с высоким крутящим моментом для 60 Гц и 12.35.2 для 50 Гц, и имеющий проскальзывание при номинальной нагрузке менее
5 процентов.
Дизайн NEMA D :
Двигатель конструкции D представляет собой двигатель с короткозамкнутым ротором, рассчитанный на то, чтобы выдерживать запуск при полном напряжении, развивая высокую
заблокированный крутящий момент ротора для 60
герц и 50 герц, и имеющих проскальзывание при номинальной нагрузке 5 процентов и более.
Однофазные двигатели NEMA
Конструкция NEMA N :
Двигатель конструкции N представляет собой однофазный небольшой двигатель, рассчитанный на пуск при полном напряжении и
ток заторможенного ротора.
Дизайн NEMA O :
Двигатель конструкции O представляет собой небольшой однофазный двигатель, рассчитанный на пуск при полном напряжении и
заблокированный ротор.
Однофазные двигатели средней мощности включают следующее:
Дизайн NEMA L :
Двигатель конструкции L представляет собой однофазный двигатель средней мощности, рассчитанный на пуск при полном напряжении и
развивать пробивной момент при токе заторможенного ротора.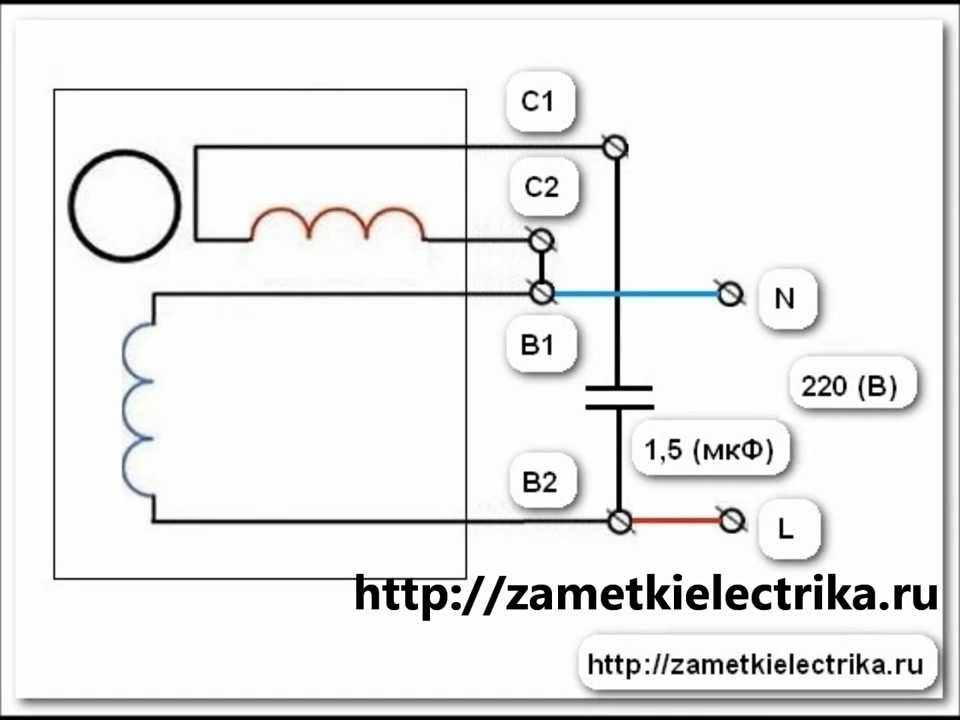
Дизайн NEMA M :
Двигатель конструкции M представляет собой однофазный двигатель средней мощности, рассчитанный на пуск при полном напряжении и
развивать пробивной момент при токе заторможенного ротора.
Однофазные асинхронные двигатели с короткозамкнутым ротором классифицируются и определяются следующим образом:
Двухфазный двигатель NEMA :
Двухфазный двигатель представляет собой однофазный асинхронный двигатель, снабженный вспомогательной обмоткой, смещенной в
магнитное положение от основной обмотки и параллельно с ней.
Если не указано иное, предполагается, что вспомогательная цепь размыкается, когда двигатель достигает
заданная скорость. Термин «двигатель с расщепленной фазой», используемый без уточнения, описывает двигатель,
используется без импеданса, отличного от того, который предлагается самими обмотками двигателя, другие типы
отдельно определены.
Электродвигатель с пусковым сопротивлением NEMA :
Двигатель с пусковым сопротивлением представляет собой двигатель с расщепленной фазой, в котором сопротивление подключено последовательно с
.
вспомогательная обмотка. Вспомогательная цепь размыкается, когда двигатель достигает заданной скорости.
Конденсаторный двигатель NEMA :
Конденсаторный двигатель представляет собой однофазный асинхронный двигатель, основная обмотка которого расположена для непосредственного подключения к
источник питания и вспомогательная обмотка, соединенные последовательно с конденсатором. Есть три типа
конденсаторные двигатели следующим образом.
Конденсаторный пусковой двигатель NEMA :
Двигатель с конденсаторным пуском — это двигатель с конденсатором, в котором фаза конденсатора находится в цепи только во время
начальный период.
NEMA Двигатель с постоянным разделением конденсаторов :
Конденсаторный двигатель с постоянным разделением конденсаторов — это конденсаторный двигатель, имеющий одинаковое значение емкости для обоих
начальные и рабочие условия.
Двухзначный конденсаторный двигатель NEMA :
Двухзначный конденсаторный двигатель представляет собой конденсаторный двигатель, использующий различные значения эффективной емкости для пусковых и рабочих условий.
Двигатель NEMA с расщепленными полюсами :
Двигатель с расщепленными полюсами представляет собой однофазный асинхронный двигатель, снабженный вспомогательной короткозамкнутой обмоткой.
или обмотки, смещенные в магнитном положении от основной обмотки.
NEMA Однофазные двигатели с фазным ротором :
Однофазные двигатели с фазным ротором определяются следующим образом:
Репульсный двигатель NEMA :
Отталкивающий двигатель – это однофазный двигатель,
мощности и обмотка ротора, подключенная к
и расположены так, что магнитная ось
обмотка. Этот тип двигателя имеет переменную скорость
Асинхронный двигатель NEMA с репульсным пуском :
Асинхронный двигатель с репульсным пуском представляет собой однотактный
но при заданной скорости обмотка ротора
аналог короткозамкнутой обмотки. Этот тип
асинхронный двигатель с постоянной скоростью вращения.
Репульсно-асинхронный двигатель NEMA :
Отталкивательно-асинхронный двигатель представляет собой форму отталкивания.
дополнение к обмотке отталкивающего двигателя.
Универсальные двигатели NEMA :
Универсальный двигатель — это двигатель с последовательным возбуждением, предназначенный для работы примерно с одинаковой скоростью и
выход на постоянный или однофазный переменный ток частотой не более 60 Гц
и примерно такое же среднеквадратичное напряжение.
Двигатель с последовательным возбуждением :
Двигатель с последовательным возбуждением представляет собой коллекторный двигатель, в котором цепь возбуждения и цепь якоря соединены между собой.
последовательно.
Компенсированный двигатель с последовательным возбуждением :
Компенсированный двигатель с последовательным возбуждением представляет собой двигатель с последовательным возбуждением и компенсирующей обмоткой возбуждения.
компенсационную обмотку возбуждения и последовательную обмотку возбуждения допускается объединять в одну обмотку возбуждения.
обмотка.