Содержание
Типы шаговых двигателей — обзор
Существуют многочисленные типы систем управления движения, основанные на коллекторных двигателях постоянного
тока,
серводвигателях, шаговых двигателях и пр. Рассмотрим управление движением при помощи шаговых двигателей.
Теоретически, шаговый двигатель очень прост. В нем нет щеток или контактных колец. В целом — это
синхронный шаговый двигатель, в котором магнитное поле статора вращаются с помощью электроники, а в роторе находятся постоянные
магниты.
Шаговый двигатель превращает управляющие импульсы в механическое вращение ротора. Преимущество шаговых
двигателей —
низкая стоимость, высокая надежность, высокий крутящий момент в области низких скоростей и простой
конструкции,
которая функционирует практически в любой окружающей среде. Главные неудобства в использовании шаговых
Главные неудобства в использовании шаговых
двигателей —
эффект резонанса, часто проявляющийся на низких скоростях и падение крутящего момента на высоких скоростях.
Система управления, основанная на использовании шагового двигателя:
Indexer, он же контроллер — микропроцессор, генерирующий импульс «ШАГ» и «НАПРАВЛЕНИЕ», по сигналам,
получаемым от
пользователя. Обычно существует множество других сложных функций, возлагаемых на микропроцессор.
Driver, он же силовая часть — преобразователь сигналов контроллера в силовые управляющие импульсы,
необходимые для
вращения ротора. Есть много различных типов драйверов с различными величинами силы тока и формами
управляющих
импульсов. Не все драйверы являются подходящими, для различных двигателей. Правильный выбор драйвера
Правильный выбор драйвера
является очень важным
при проектировании системы управления.
купить шаговый двигатель
купить блок управления шаговым двигателем
Существуют три типа шаговых двигателей:
- с переменным магнитным сопротивлением
- с постоянными магнитами
- гибридные
В двигателях с переменным магнитным сопротивлением не используются постоянные магниты.
Как следствие, у двигателя отсутствует так называемый «detent torque» — стопорный момент. Этот тип
конструкции не
обеспечивает высокого крутящего момента.
У двигателей с постоянными магнитами величина шага редко бывает менее 7,5°, что связано с конструктивными
особенностями его ротора.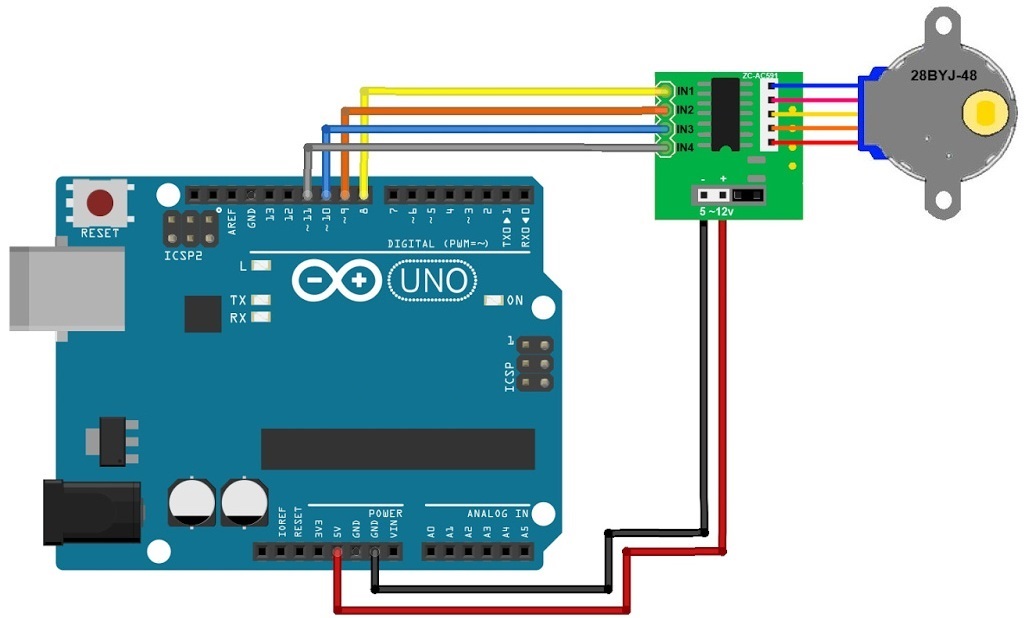
Главным достоинством двигателей с постоянными магнитами является их низкая цена, а недостатком — низкие
скорости
вращения.
В гибридных двигателях многополюсный статор и ротор с постоянными магнитами позволяют, получить значительный
крутящий
момент (до 300 кгс*см) и малую величину шага (1,8° и менее).
Стопорный момент гибридных шаговых двигателей обычно составляет 10% от величины статического
синхронизирующего
момента.
По способу питания шаговые двигатели можно разделить на униполярные и биполярные.
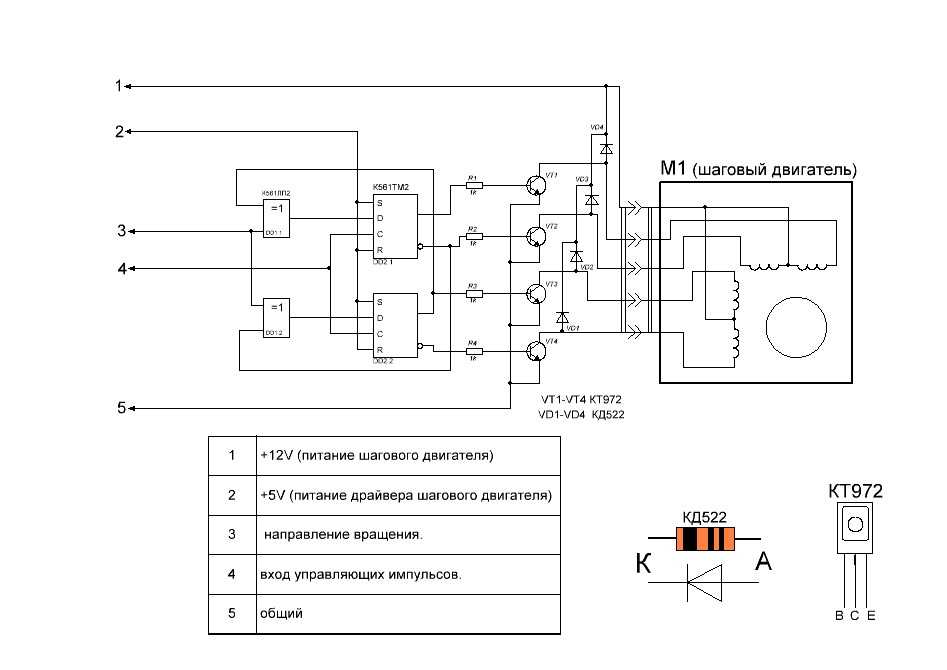
Приведенные на рисунке схемы можно использовать как биполярные, так и как униполярные. В случае если отводы
от
средних точек обмоток соединены между собой внутри двигателя и пользователю доступны только пять выводов,
что бывает
очень редко, двигатель можно использовать только как униполярный.
Дополнительные рекомендации по выбору шагового двигателя здесь.
Шаговый двигатель для ЧПУ | Техника и человек
Шаговые электродвигатели можно встретить в устройстве автомобильных приборных панелей, принтеров, приводов CD-дисков, электрических инструментов, в общем – везде, где необходима повышенная точность позиционирования. Но наибольшую известность ШД получил в станках с ЧПУ.
Но почему этот механизм именуется именно так – «шаговый двигатель»? Если описывать его в двух словах, то он представляет собой бесщеточный синхронный мотор с несколькими проволочными обмотками. Электрический ток подается в одну из обмоток статора (неподвижного элемента) и таким образом фиксирует ротор (подвижную часть) в определенной позиции. Затем ток поступает в другую обмотку и ротор совершает новое движение. Такая последовательная смена позиции именуется «шаг». И именно благодаря этому принципу работы Шаговый Электродвигатель получил свое название.
Устройство и виды ШД
На сегодняшний день различают три основных типа шаговых двигателей:
- С переменным магнитным сопротивлением. Устройство таких моторов предполагает наличие нескольких полюсов на статичном элементе. Ротор в данном виде ШД обладает зубчатой формой и создается он из не жесткого материала, к тому же при этом сам не является намагниченным. Если мы в качестве примера рассмотрим мотор с переме
нным сопротивлением, в котором статор будет шести-полюсным, а конструкция ротора состоит из четырех зубцов, то количество независимых обмоток в таком двигателе составит 3 штуки. Каждая из них наматывается на два противоположных статорных полюса. Размер одного шага такого мотора составит 30 градусов. - ШД с постоянными магнитами. Как мы можем заключить из названия, в роторе такого двигателя обязательно применяются постоянные магниты. Полюсы располагаются параллельно моторной оси и обладают прямолинейной формой. Намагниченность ротора позволяет обеспечить более мощный магнитный поток.
 По этой причине, крутящий момент будет на порядок выше, чем в ШД с переменным сопротивлением. Обычно величина шага двигателя с постоянными магнитами варьируется в диапазоне 7,5-15 градусов. А количество шагов на один оборот, в зависимости от модели, может составлять 24-48.
По этой причине, крутящий момент будет на порядок выше, чем в ШД с переменным сопротивлением. Обычно величина шага двигателя с постоянными магнитами варьируется в диапазоне 7,5-15 градусов. А количество шагов на один оборот, в зависимости от модели, может составлять 24-48. - Шаговые двигатели гибридного типа. При изобретении таких моторов делался упор на то, чтобы максимально эффективно сочетать в одном устройстве достоинства двух описанных выше видов ШД. Зубцы в роторе гибридного двигателя установлены в осевом направлении. Это позволяет обеспечить более высокую скорость, сократить величину шага и увеличить крутящий момент. В большинстве гибридных ШД число шагов за один оборот составляет от 100 до 400. При этом, угол одного шага – всего 0,9-3,6 градусов. Для снижения скачкообразности движения ротора используется особый режим микрошагов. Самый распространенный представитель данного вида — это биполярный шаговый двигатель nema.
 По этой причине, крутящий момент будет на порядок выше, чем в ШД с переменным сопротивлением. Обычно величина шага двигателя с постоянными магнитами варьируется в диапазоне 7,5-15 градусов. А количество шагов на один оборот, в зависимости от модели, может составлять 24-48.
По этой причине, крутящий момент будет на порядок выше, чем в ШД с переменным сопротивлением. Обычно величина шага двигателя с постоянными магнитами варьируется в диапазоне 7,5-15 градусов. А количество шагов на один оборот, в зависимости от модели, может составлять 24-48.Следует отметить, что микрошаг возможен только в гибридных ШД.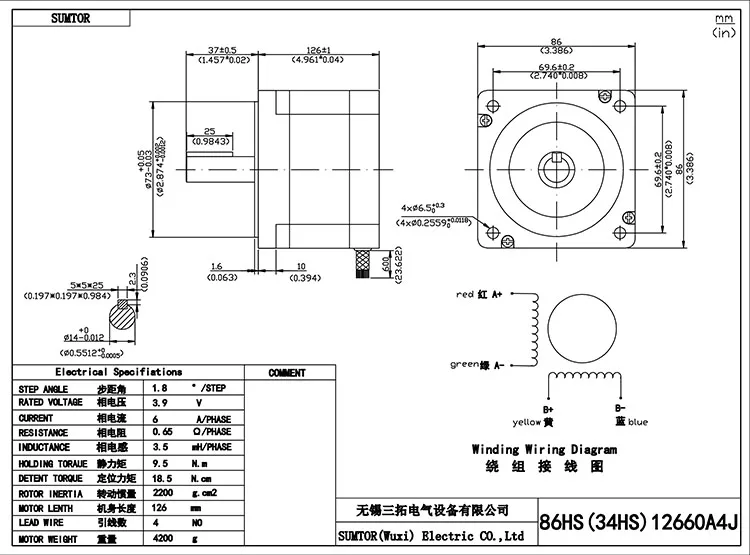 Каждый микрошаг осуществляется посредством независимого управления обмотками. При помощи управления соотношением токов ротор может фиксироваться даже на промежуточном участке между двумя соседствующими шагами. Это повышает плавность вращения подвижного элемента и позволяет добиться оптимальной точности позиционирования. Количество шагов в этом режиме может достигать даже 51 200 за один оборот.
Каждый микрошаг осуществляется посредством независимого управления обмотками. При помощи управления соотношением токов ротор может фиксироваться даже на промежуточном участке между двумя соседствующими шагами. Это повышает плавность вращения подвижного элемента и позволяет добиться оптимальной точности позиционирования. Количество шагов в этом режиме может достигать даже 51 200 за один оборот.
Многие любители задаются вопросом: почему выбрана именно зубчатая форма ротора? Ответ прост: в целях получения периодической зависимости обмотки статора от углового положения ротора. Зазор между пазами делается намного большим, чем между зубцами. Это позволяет обеспечить более низкую магнитную проводимость зазоров относительно удельной проводимости зубцов. В противном случае, шаговый двигатель просто не смог бы функционировать. Очевидно, что именно совокупность всех его конструктивных особенностей, а также форм и состава элементов позволяют ШД быть полноценным механизмом, а не просто куском металла.
Кроме того, в зависимости от типа обмоток, ШД подразделяют на:
- биполярные. Они обладают по одной обмотке для каждой фазы. Изменение направления магнитного поля в них обеспечивается посредством переплюсовки драйвером – двухполярным полумостовым или мостовым;
- униполярные. Такой шаговый двигатель также обладает по одной обмотке в каждой из фаз, но при этом от середины любой отдельной обмотки делается отвод. Таким образом направление поля можно менять посредством переключения используемой половинки обмотки. Драйвер должен содержать лишь четыре ключа, так что он проще, чем в биполярном моторе.
Характеристики ШД
В технической документации к шаговым двигателям вы можете встретить такой перечень характеристик:
- Крутящий момент или момент вращения. Измеряется в килограмм-сила-сантиметрах. Часто к этому пункту прилагается график, в котором выражается зависимость вращательного момента от частоты вращения. Чем выше этот показатель, тем быстрее мотор набирает обороты при включении.
- Удерживающий момент. Он показывает, с какой силой статор может блокировать ротор, когда двигатель включен, но не запущен. То есть это параметр крутящего момента при нулевой скорости. По графику он снижается прямо пропорционально повышению скорости вращения. Измеряется данный показатель в унциях-на-дюйм. Удерживающий момент в мере, указанной производителем, мотор может продемонстрировать лишь в статическом режиме, при условии, что полный ток подается сразу в две фазы.
- Тормозящий момент. Это величина силы, удерживающей ротор от вращения в условиях отсутствия подачи тока. То есть, сила фиксации ротора при выключении. Также его именуют стопорный момент. В гибридных ШД он составляет не более десятой части от величины силы, удерживающей ротор от проворачивания при полной подаче тока. Данная характеристика измеряется в тех же единицах, что и удерживающий момент.
- Номинальное напряжение. Этот показатель напрямую зависит от индуктивности обмоток и позволяет определить оптимальное напряжение, которое следует подавать в двигатель. Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.
- Отдельно указывается результат проведения диэлектрических испытаний, в ходе которых было определено максимальное напряжение, которое способна выдержать обмотка в течение определенного отрезка времени. Этим показателем определяется прочность двигателя, то, насколько успешно он может сопротивляться перегрузкам.
- Момент инерции подвижной части мотора. Определяет скорость разгона ШД. Данная величина измеряется в грамм-квадратных сантиметрах.
- Количество шагов за один оборот (учитываются только полные шаги, половинчатые значения не берутся во внимание). Чем больше шагов, тем мощнее и быстрее двигатель.
- Длина и масса. Имеется в виду именно длина корпуса, без учета вала. А вот в параметре «вес» указывается общая масса изделия. От габаритов и массы зависит, в каких условиях может использоваться двигатель. В одних случаях нужен компактный мотор, а в других подойдет только более крупный и мощный.
 Чем выше этот показатель, тем быстрее мотор набирает обороты при включении.
Чем выше этот показатель, тем быстрее мотор набирает обороты при включении.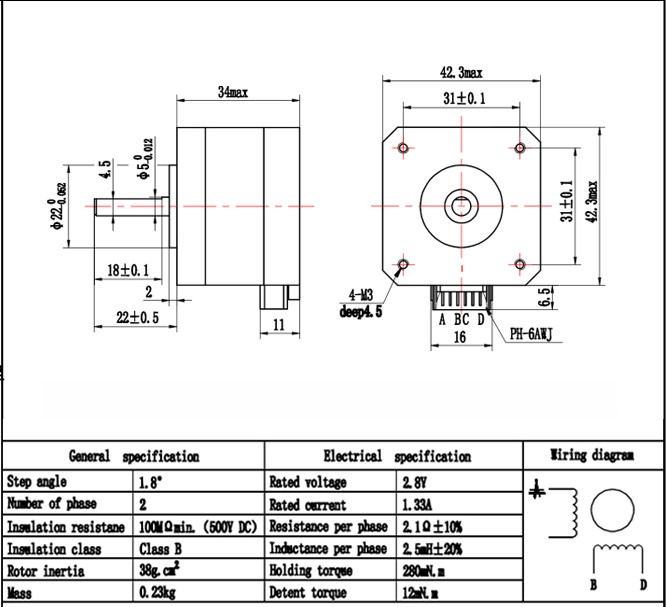 Этот показатель напрямую зависит от индуктивности обмоток и позволяет определить оптимальное напряжение, которое следует подавать в двигатель. Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.
Этот показатель напрямую зависит от индуктивности обмоток и позволяет определить оптимальное напряжение, которое следует подавать в двигатель. Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.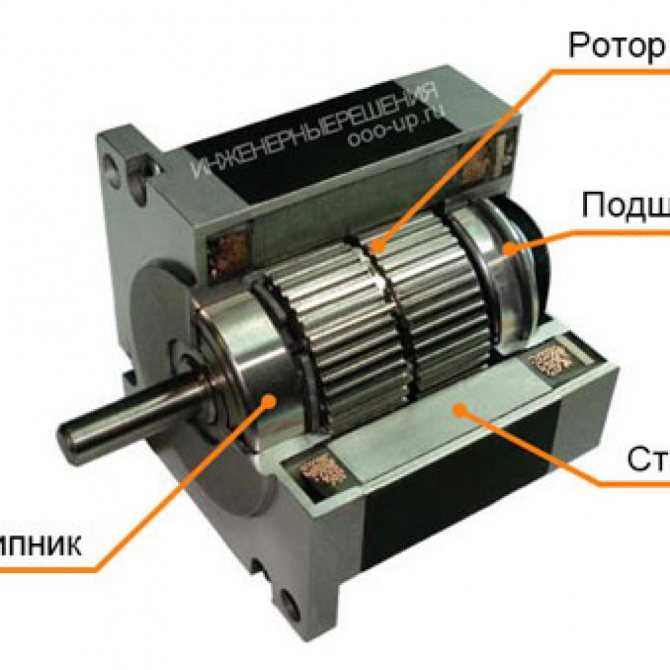 Данная величина измеряется в грамм-квадратных сантиметрах.
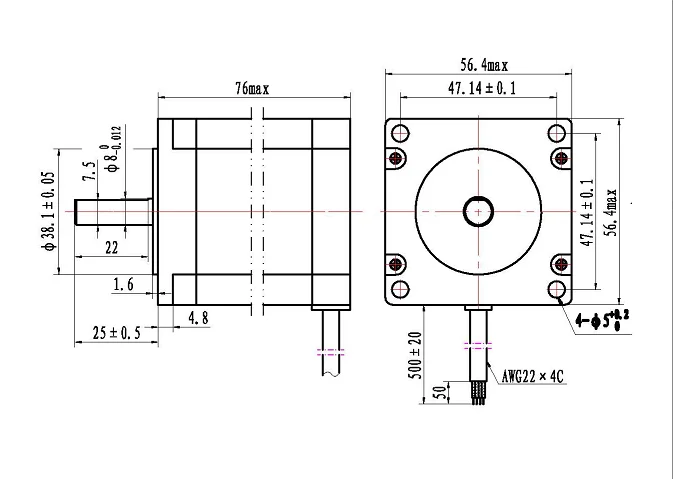
Данная величина измеряется в грамм-квадратных сантиметрах.Рассмотрим на примере шаговый двигатель nema. Двигатель PL57h51, что обозначает ширину-высоту (диаметр) по квадратному фланцу 57мм — PL57. Длина двигателя, без вала 41мм — h51. Крутящий, удерживающий и другие моменты двигателя больше зависят от диаметра, чем от длины двигателя.
Характеристики PL57h210
| PL57h210 | L, мм | 131 | Индуктивность фазы, мГн | 6.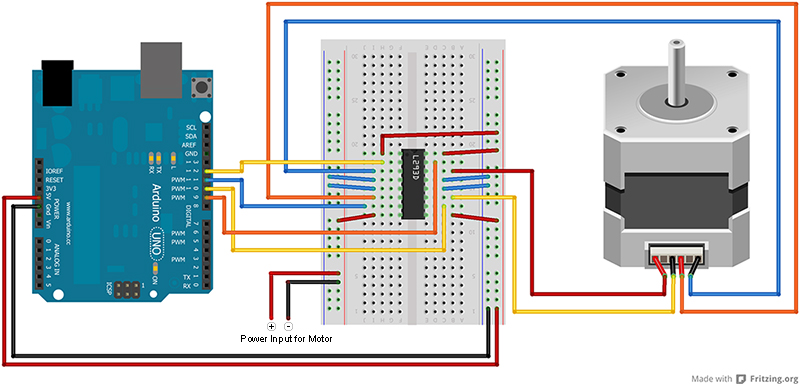 0±20% 0±20% |
| Угловой шаг, ° | 1.8±5% | Сопротивление фазы, Ом | 1.0±10% | |
| Число фаз | 2 | Момент удержания,кгхсм | 28 | |
| Сопротивление изоляции, МОм | 100 | Момент инерции,г х см 2 | 405 | |
| Температура окруж. среды, °С | -20~40 | Масса, кг | 1.7 | |
| Рабочая температура, °С | 110 max | Количество валов | 1 | |
| Ток фазы,А | 4 | Тип | ||
| Радиальное биение вала двигателя (нагрузка 450г.) | Размер шпоночного паза, мм |
Характеристики PL86h213
| PL86h213 | L1 ±1, мм | 113 | Сопротивление фазы, Ом | 1.0±10% |
| L2±1, мм | 35 | Момент удержания, кг х см | 1″ | |
| L3 , мм | 148 | 2 | 2700 | |
| Угловой шаг, ° | 1.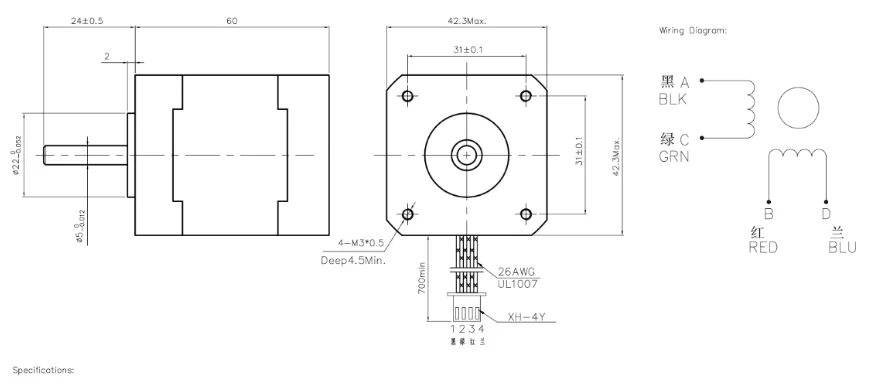 8±5% 8±5% | Количество валов | 1 | |
| Число фаз | 2 | Масса, кг | 3.5 | |
| Сопротивление изоляции, МОм | 100 | Радиальное биение вала двигателя (нагрузка 450г.) | ||
| Температура окруж. среды, °С | -20-40 | |||
| Рабочая температура, °С | 110 max | Индуктивность фазы, мГн | 6.3±20% | |
| Ток фазы, А | 4.2 |
Подключение, драйверы и инкодеры
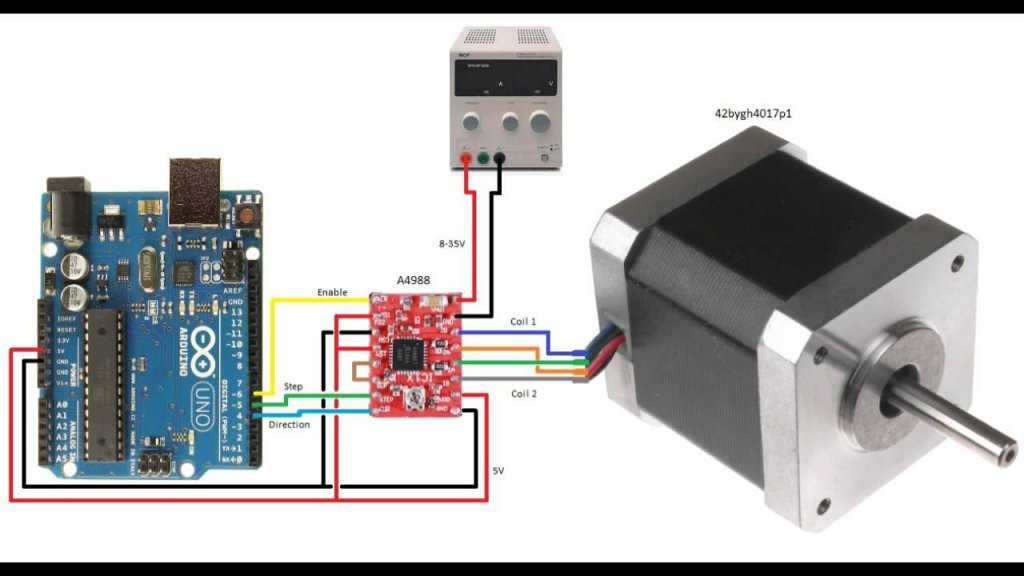
Как правило, управление шаговыми моторами осуществляется посредством специальных драйверов, подключаемых к LTP-порту компьютера. Драйвер принимает генерируемые программой сигналы и трансформируют их в команды двигателю, передаваемые посредством подачи тока на обмотки. Программное обеспечение может регулировать траекторию, величину, скорость и величину движения.
Драйвер является блоком управления шаговым двигателем. В станках ЧПУ управляющие сигналы формируются на ЧПУ контроллерах, поэтому к драйверу подключают 4 вывода шагового двигателя, управляющие провода с контроллера ЧПУ (обычно 4 провода) и питание + и — с блока питания.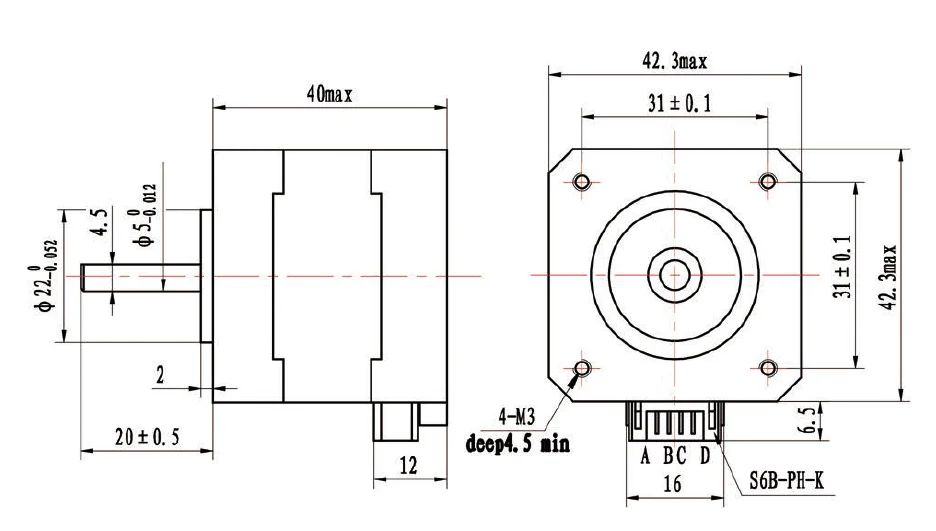 Сигналы с контроллера поступают в драйвер, где уже они управляют переключением ключей силовой схемы питающего напряжения, идущего с блока питания, через эти ключи на двигатель.
Сигналы с контроллера поступают в драйвер, где уже они управляют переключением ключей силовой схемы питающего напряжения, идущего с блока питания, через эти ключи на двигатель.
Подбирать драйвер следует по максимальному выдаваемому току нужного напряжения на выводы, для обмоток двигателя. Ток выдаваемый драйвером должен быть, либо таким же, какой будет потреблять двигатель, либо выше. На драйвере есть переключатели, с помощью которых можно выставить желаемые параметры выходного напряжения и не сжечь двигатель.
Порядок подключения шагового двигателя к общей цепи зависит от того, сколько проводов в вашем приводе и как именно вы хотите использовать ШД. Моделей существует очень много и ля каждой из них существует своя схема подключения. Количество проводов в двигателе может варьироваться в диапазоне от четырех до шести. Четырехпроводные моторы используются исключительно с биполярными механизмами.
Каждым двум обмоткам соответствует два провода. Чтобы определить необходимые пары и связь между ними, вам пригодится метр.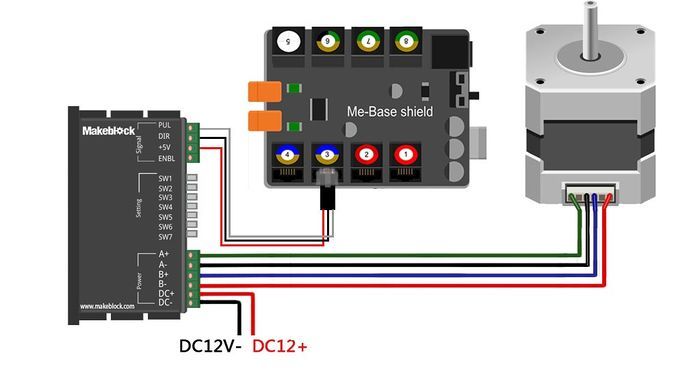 Самыми мощными считаются шести-проводные двигатели. В них для каждой отдельной обмотки предусмотрен центр-кран и два провода. Такой ШД можно подключать и к биполярным, и к униполярным аппаратам. Вам понадобится специальный измерительный прибор, чтобы разделить провода. Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Самыми мощными считаются шести-проводные двигатели. В них для каждой отдельной обмотки предусмотрен центр-кран и два провода. Такой ШД можно подключать и к биполярным, и к униполярным аппаратам. Вам понадобится специальный измерительный прибор, чтобы разделить провода. Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Центр-кран это обыкновенный провод, который еще называют «средним» или «центральным». Он есть в некоторых видах шаговых двигателей. В униполярных двигателях для каждой обмотки предусмотрено три провода. Два из них предназначены для подключения к транзисторам. А средний, то есть центр-кран, необходимо подключать к источнику напряжения. То есть, если вам не нужно подключать транзисторы, вы можете просто проигнорировать два боковых провода.
Пяти-проводные ШД схожи с шести-проводными, однако в них центральные провода выведены в один общий кабель, вместе с остальными. Без разрывов вам не удастся разделить между собой обмотки.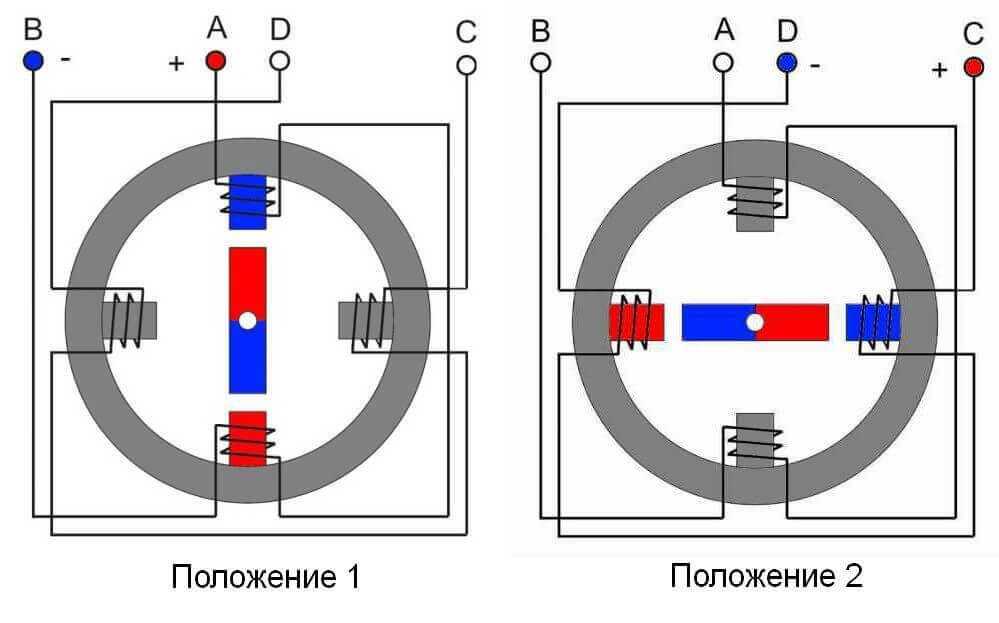 Лучше всего обнаружить средний провод и соединить его с другими проводниками – это будет эффективным и самым не опасным вариантом.
Лучше всего обнаружить средний провод и соединить его с другими проводниками – это будет эффективным и самым не опасным вариантом.
Часто с ШД используются и энкодеры. Они являются просто датчиками, задача которых заключается в подаче сигналов программному обеспечению. Многие специалисты считают, что в большинстве случаев сочетать шаговый двигатель с энкодерами не имеет смысла и является неэффективной тратой денег. Но если имеет место быть нелинейная зависимость движения от количества шагов, когда необходимо построить пятую координату, энкодер будет незаменим. Он поможет с большей легкостью отслеживать углы поворота стола, что сэкономит время, избавив от необходимости применять более сложные методы.
Сферы применения, плюсы и минусы
Особое распространение ШД получили в высокотехнологической и тяжелой промышленности. Благодаря тому, что они являются весьма недорогостоящими, а устроены они довольно просто, спрос на них не угасает даже в 21-м веке. Часто вы можете обнаружить их в станках ЧПУ, роботизированной технике, на устройствах автоматизации (подача, дозировка, механизмы автоматической сварки и сборки и так далее).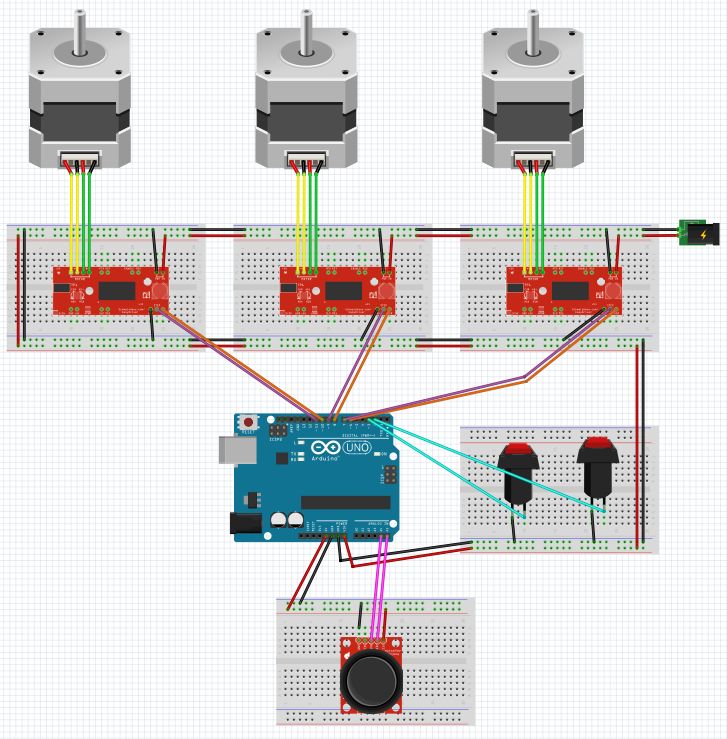
Особо популярны шаговые двигатели в конструкциях координаторных столов и станков ЧПУ. Благодаря низкой стоимости программного обеспечения, необходимого для их функционирования, ШД являются незаменимыми в производственном секторе, в панелях управления, программирования и постановки задач и в других элементах механизмов.
Шаговые двигатели часто используются периферийных элементах ЭВМ, печатных станках и приборах, фрезерных станках и чертежных автоматах, системах контроля и управления, перфораторах, считывателях лент.
С ШД по популярности конкурируют серводвигатели, которые могут выполнять аналогичные функции в тех же условиях, что и шаговые моторы.
Достоинства шаговых двигателей в сравнении с серводвигателями:
- Исправно функционируют при большом диапазоне нагрузок.
- Фиксированный угол поворота, стандартизированные размеры мотора.
- Невысокая стоимость.
- Простота установки и применения, надежность, долговечность.
- При слишком высоких оборотах двигатель не сгорает, а пропускает шаги.

Основные недостатки ШД по сравнению с серводвигателями:
- Низкий КПД. Высокое потребление энергии вне зависимости от нагрузки.
- Резкое снижение крутящего момента при увеличении частоты оборотов.
- При таких размерах и массе мощность ниже ожидаемой.
- В процессе работы мотор сильно нагревается.
- Высокий уровень шума на высокой и средней частотах.
Шаговые двигатели
— гибридные шаговые двигатели и гибридное управление с обратной связью AlphaStep
Информация о продукте
Решения
Техническая информация
Размер двигателя
Загрузки
Виртуальный выставочный зал
Свяжитесь с нами
αSTEP
Шаговые двигатели
Бесщеточные двигатели постоянного тока
Серводвигатели
Редукторные двигатели переменного тока
Линейные приводы
Поворотные приводы
Сетевые продукты
Вентиляторы охлаждения
Бесплатная доставка для онлайн-заказов. Принять условия.
Принять условия.
Шаговые двигатели > Технологии > Гибридные шаговые двигатели и гибридные системы управления AlphaStep
Все двигатели преобразуют электрическую мощность, вольты и амперы, в механическую мощность, крутящий момент и скорость. Уникальная особенность шаговых двигателей заключается в том, что ими можно очень точно управлять с точки зрения скорости и угла поворота. Шаговые двигатели представляют собой бесщеточные двигатели постоянного тока, поэтому для коммутации обмоток требуется электронный драйвер. Чтобы управлять вращением, электрические импульсы вводятся в драйвер, и двигатель вращается на один шаг для каждого импульса. Превосходная стабильность двигателя обеспечивает простую схему управления, поскольку двигатель может работать без обратной связи и не требует обратной связи.
Существует три типа шаговых двигателей; переменное магнитное сопротивление, двигатели с постоянными магнитами и гибридные шаговые двигатели. Эта статья будет посвящена гибридным шаговым двигателям, а также гибридной системе управления AlphaStep компании Oriental Motor для шаговых двигателей.
Что такое гибридный шаговый двигатель?
Гибридный шаговый двигатель представляет собой комбинацию двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного шагового двигателя намагничивается в осевом направлении, как шаговый двигатель с постоянными магнитами, а статор питается электромагнитным полем, как шаговый двигатель с переменным сопротивлением. И статор, и ротор многозубчатые.
Гибридный шаговый двигатель имеет аксиально намагниченный ротор, что означает, что один конец намагничен как северный полюс, а другой конец как южный полюс. Зубчатые чашки ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Сравнение типов шаговых двигателей
Компания Oriental Motor предлагает три типа гибридных шаговых двигателей:
- Двухфазные гибридные шаговые двигатели
- 5-фазные гибридные шаговые двигатели
- Гибридные шаговые двигатели AlphaStep с замкнутым контуром
Гибридные системы управления
Гибридная система управления AlphaStep компании Oriental Motor представляет собой гибридный пакет шагового двигателя и драйвера, обеспечивающий улучшенную реакцию и надежность.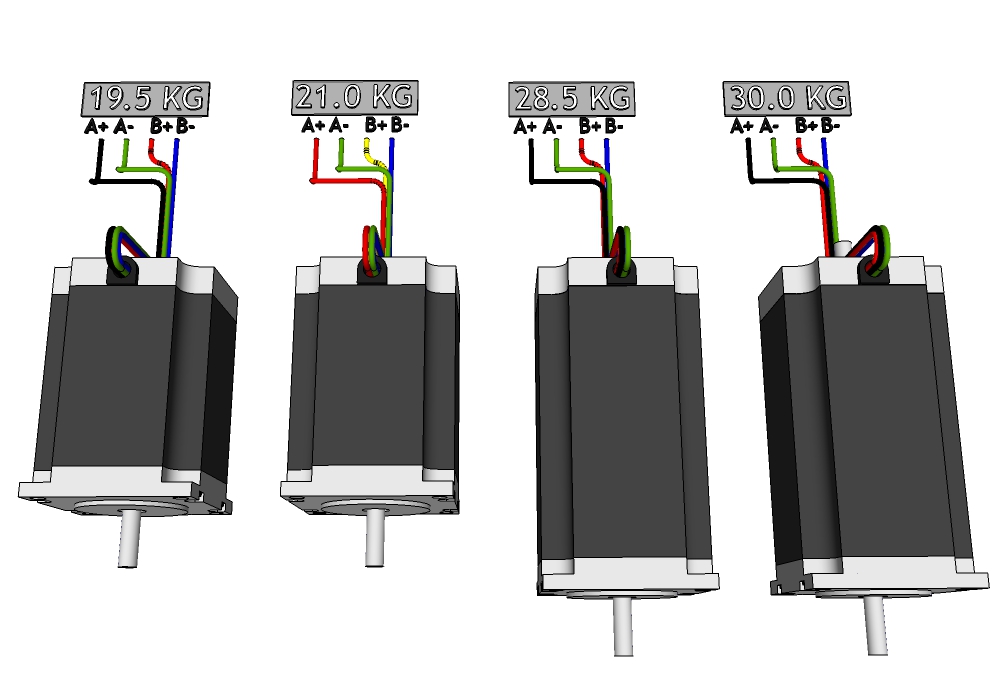 AlphaStep имеет уникальную систему управления, сочетающую в себе преимущества «управления с разомкнутым контуром» и «управления с замкнутым контуром».
AlphaStep имеет уникальную систему управления, сочетающую в себе преимущества «управления с разомкнутым контуром» и «управления с замкнутым контуром».
В системе управления AlphaStep положение двигателя всегда отслеживается, а затем водитель автоматически переключается между двумя типами управления в зависимости от ситуации. В нормальных условиях работа двигателя контролируется, и управление осуществляется с помощью разомкнутого контура, как в стандартном шаговом двигателе. Если возникает ошибка между командой и положением двигателя из-за нагрузки и т.п., система немедленно переключается на управление с обратной связью, как серводвигатель. Это корректирует положение и скорость, поддерживая желаемую работу. Сочетание этих двух методов управления обеспечивает высокую надежность и производительность.
Гибридная система управления AlphaStep доступна для стандартных и редукторных шаговых двигателей AlphaStep, поворотных приводов AlphaStep, линейных направляющих и цилиндров AlphaStep и компактных линейных приводов AlphaStep.
- Узнайте больше о семействе продуктов AlphaStep
Обычно работает в режиме управления с разомкнутым контуром для такой же простоты использования, как и шаговый двигатель
Высокая скорость отклика на двигатель, перемещающийся на короткие расстояния в течение короткого времени возможно. Моторы могут выполнять команды без задержки.
Удержание положения остановки без рысканья
Во время позиционирования двигатель останавливается за счет собственного удерживающего усилия без рысканья. Из-за этого он идеально подходит для приложений, где низкая жесткость механизма требует отсутствия вибрации при остановке.
Без настройки
Поскольку обычно он работает с управлением без обратной связи, позиционирование все еще возможно без регулировки усиления, даже когда нагрузка колеблется из-за использования ременного механизма, кулачкового или цепного привода и т.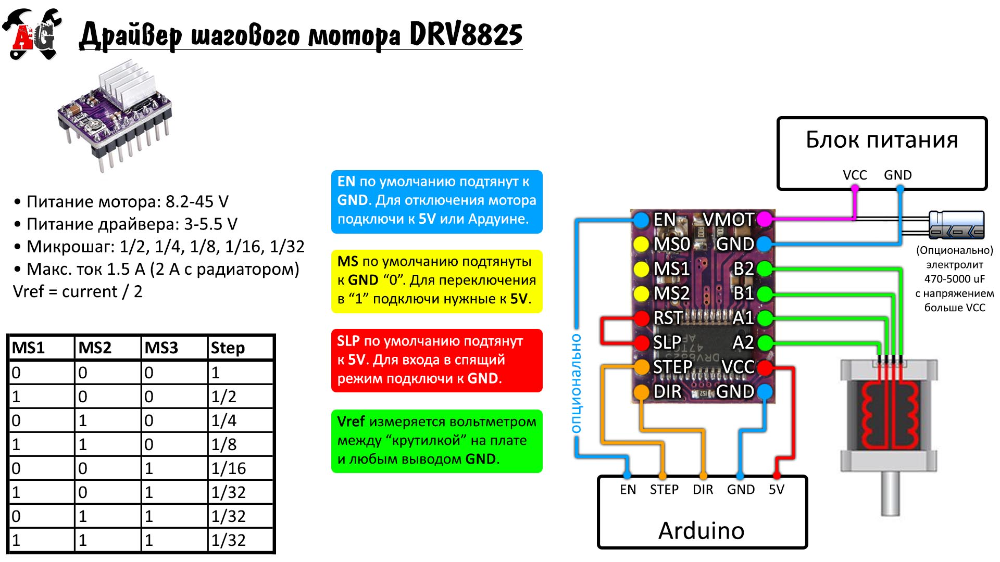 д.
д.
Переключается на управление с обратной связью во время перегрузки для более надежной работы, как серводвигатель
Продолжает работу даже при внезапных колебаниях нагрузки и резком ускорении
Работает синхронно с командами, используя разомкнутый контур контроль в нормальных условиях. В состоянии перегрузки он немедленно переключается на управление с обратной связью, чтобы скорректировать положение.
Выход сигнала тревоги в случае неисправности
При продолжительной перегрузке выдается аварийный сигнал. Когда позиционирование завершено, выводится сигнал END. Это обеспечивает тот же уровень надежности, что и серводвигатель.
Узнайте больше о системе управления AlphaStep
- Поиск по артикулу
- Слайд с содержимым
- Слайд с содержимым
Руководство по выбору шаговых двигателей
Введение
Шаговые двигатели широко используются в различных отраслях промышленности благодаря точному управлению и высокому крутящему моменту. Однако выбор правильного шагового двигателя для конкретного приложения может быть сложной задачей, поскольку необходимо учитывать множество факторов, таких как скорость, точность и условия окружающей среды. В этой статье мы предлагаем исчерпывающее руководство, которое поможет вам выбрать лучший шаговый двигатель для ваших конкретных нужд, включая обзор различных типов шаговых двигателей и их характеристик, а также ключевые факторы, которые следует учитывать при выборе двигателя.
Однако выбор правильного шагового двигателя для конкретного приложения может быть сложной задачей, поскольку необходимо учитывать множество факторов, таких как скорость, точность и условия окружающей среды. В этой статье мы предлагаем исчерпывающее руководство, которое поможет вам выбрать лучший шаговый двигатель для ваших конкретных нужд, включая обзор различных типов шаговых двигателей и их характеристик, а также ключевые факторы, которые следует учитывать при выборе двигателя.
Основы работы с шаговым двигателем
Как выбрать шаговый двигатель
Основы работы с шаговым двигателем
Шаговый двигатель представляет собой электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические движения. Вал или шпиндель шагового двигателя вращается с дискретным приращением шага, когда на него подаются электрические импульсы управления в правильной последовательности. Вращение двигателей имеет несколько прямых зависимостей от приложенных входных импульсов. Последовательность подаваемых импульсов напрямую связана с направлением вращения вала двигателя. Скорость вращения валов двигателя напрямую связана с частотой входных импульсов, а длина вращения напрямую связана с количеством приложенных входных импульсов.
Вращение двигателей имеет несколько прямых зависимостей от приложенных входных импульсов. Последовательность подаваемых импульсов напрямую связана с направлением вращения вала двигателя. Скорость вращения валов двигателя напрямую связана с частотой входных импульсов, а длина вращения напрямую связана с количеством приложенных входных импульсов.
Преимущества и ограничения шагового двигателя
Преимущества
- Угол поворота двигателя пропорционален входным импульсам.
- Двигатель имеет полный крутящий момент в состоянии покоя (если обмотки находятся под напряжением).
- Точное позиционирование и повторяемость движения, поскольку точность большинства шаговых двигателей составляет 3–5 % от шага, и эта ошибка не накапливается от одного шага к другому.
- Превосходная реакция на пуск, остановку и реверс.
- Чрезвычайно надежный, так как в двигателе нет контактных щеток, поэтому срок службы двигателя в основном зависит от срока службы подшипников.
- Реакция двигателей на цифровые входные импульсы обеспечивает управление без обратной связи, что делает систему более простой и, следовательно, более экономичной.
- Можно добиться синхронного вращения на очень низкой скорости с нагрузкой, которая непосредственно связана с валом.
- Может быть реализован широкий диапазон скоростей вращения, поскольку скорость пропорциональна частоте входных импульсов.
Ограничения
- Резонансы могут возникать, если их не контролировать должным образом.
- Двигатель неудобен в эксплуатации на экстремально высоких скоростях, т.е. 3000 об/мин и выше.
Обзор типов шаговых двигателей
Существует три основных типа шаговых двигателей. Это:
- С переменным сопротивлением
- С постоянными магнитами
- Гибрид
С переменным сопротивлением (VR)
Этот тип шагового двигателя существует уже давно. Вероятно, его легче всего понять со структурной точки зрения. Этот тип двигателя состоит из многозубчатого ротора из мягкого железа и обмотки статора. Когда обмотки статора питаются постоянным током, полюса намагничиваются, вращение происходит, когда зубья ротора притягиваются к полюсам статора, находящимся под напряжением.
Вероятно, его легче всего понять со структурной точки зрения. Этот тип двигателя состоит из многозубчатого ротора из мягкого железа и обмотки статора. Когда обмотки статора питаются постоянным током, полюса намагничиваются, вращение происходит, когда зубья ротора притягиваются к полюсам статора, находящимся под напряжением.
Постоянный магнит (PM)
Шаговый двигатель с постоянными магнитами, который часто называют «жестяной банкой» или «банкой», представляет собой недорогой двигатель с низким разрешением и типичным углом шага от 7,5° до 15° ( 48 – 24 шага/оборот). Двигатели с постоянными магнитами, как следует из названия, имеют постоянные магниты, добавленные к конструкции двигателя. Ротор больше не имеет зубьев, как в двигателе VR, вместо этого ротор намагничен чередующимися северным и южным полюсами, расположенными по прямой линии, параллельной валу ротора. Эти намагниченные полюса ротора обеспечивают повышенную интенсивность магнитного потока, благодаря чему двигатель с постоянными магнитами демонстрирует улучшенные характеристики крутящего момента по сравнению с двигателем типа VR.
Гибридный (HB)
Гибридный шаговый двигатель обычно дороже, чем шаговый двигатель с постоянными магнитами, но обеспечивает лучшую производительность в отношении шагового разрешения, крутящего момента и скорости. Типичный угол шага шагового двигателя HB составляет от 3,6° до 0,9° (100–400 шагов на оборот). Гибридный шаговый двигатель сочетает в себе лучшие характеристики шаговых двигателей PM и VR. Ротор многозубчатый, как двигатель VR, и содержит намагниченный в осевом направлении концентрический магнит вокруг его вала. Зубья на роторе обеспечивают еще лучший путь, который помогает направлять магнитный поток в предпочтительные места в воздушном зазоре. Это дополнительно увеличивает характеристики фиксации, удержания и динамического крутящего момента двигателя по сравнению с типами VR и PM. На рисунке ниже показано поперечное сечение типичного гибридного шагового двигателя.
Рис. 1: Поперечное сечение гибридного (HB) шагового двигателя
Двумя наиболее часто используемыми типами шаговых двигателей являются двигатели с постоянными магнитами (PM) и гибридные двигатели.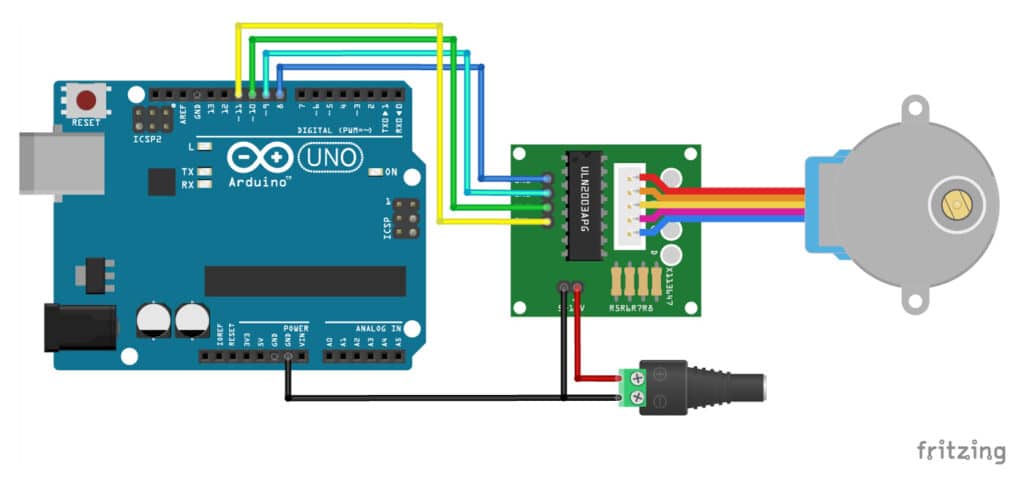 Вообще говоря, гибридный шаговый двигатель может быть лучшим выбором по стоимости, а также он обеспечивает лучшую производительность в отношении шагового разрешения, крутящего момента и скорости.
Вообще говоря, гибридный шаговый двигатель может быть лучшим выбором по стоимости, а также он обеспечивает лучшую производительность в отношении шагового разрешения, крутящего момента и скорости.
Как выбрать шаговый двигатель
Шаговый двигатель может быть хорошим выбором, когда требуется контролируемое движение. Их можно использовать в приложениях, где необходимо контролировать угол поворота, скорость, положение и синхронность. Благодаря преимуществам, перечисленным ранее, шаговые двигатели нашли свое применение во многих различных приложениях. Некоторые из них включают принтеры, плоттеры, координатные столы, лазерные резаки, гравировальные станки, устройства для захвата и так далее.
При выборе шагового двигателя для вашего приложения необходимо учитывать несколько факторов:
- Как двигатель будет соединен с нагрузкой?
- Как быстро груз должен двигаться или ускоряться?
- Какой крутящий момент требуется для перемещения груза?
- Какая степень точности требуется при позиционировании груза?
Фазы, полюса и углы шаговых двигателей
Обычно шаговые двигатели имеют две фазы, но также существуют трех- и пятифазные двигатели.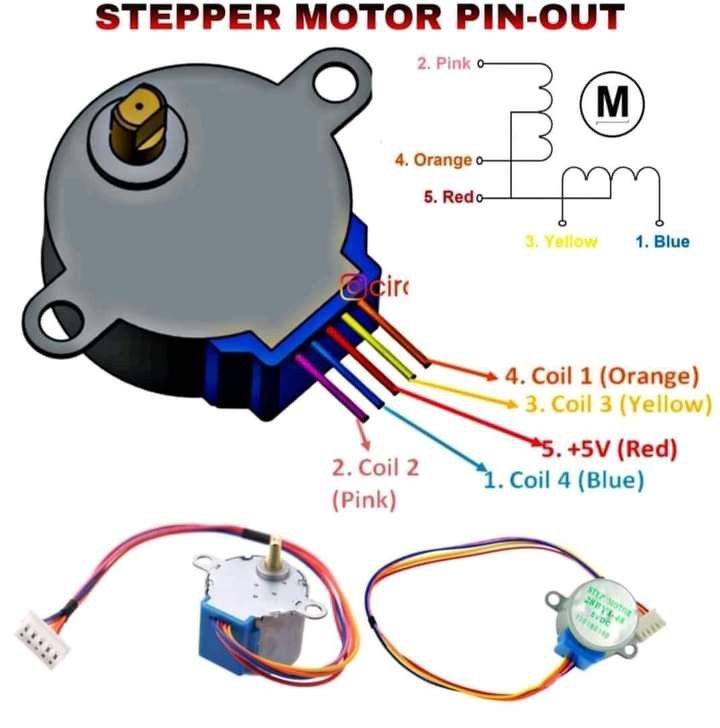 Биполярный двигатель с двумя фазами имеет одну обмотку/фазу, а униполярный двигатель имеет одну обмотку с центральным отводом на фазу. Иногда шаговый двигатель называют «четырехфазным двигателем», хотя у него всего две фазы. Двигатели с двумя отдельными обмотками на фазу могут работать как в биполярном, так и в униполярном режиме.
Биполярный двигатель с двумя фазами имеет одну обмотку/фазу, а униполярный двигатель имеет одну обмотку с центральным отводом на фазу. Иногда шаговый двигатель называют «четырехфазным двигателем», хотя у него всего две фазы. Двигатели с двумя отдельными обмотками на фазу могут работать как в биполярном, так и в униполярном режиме.
Полюс можно определить как одну из областей в намагниченном теле, где сосредоточена плотность магнитного потока. И ротор, и статор шагового двигателя имеют полюса. Шаговый двигатель гибридного типа имеет ротор с зубьями. Ротор разделен на две части, разделенные постоянным магнитом, образующим половину зубьев с южным полюсом и половину с северным полюсом. Количество пар полюсов равно количеству зубьев на одной из половин ротора. Статор гибридного двигателя также имеет зубцы для создания большего количества эквивалентных полюсов (меньший шаг полюсов, количество эквивалентных полюсов = 360/шаг зубьев) по сравнению с основными полюсами, на которых намотаны катушки обмотки.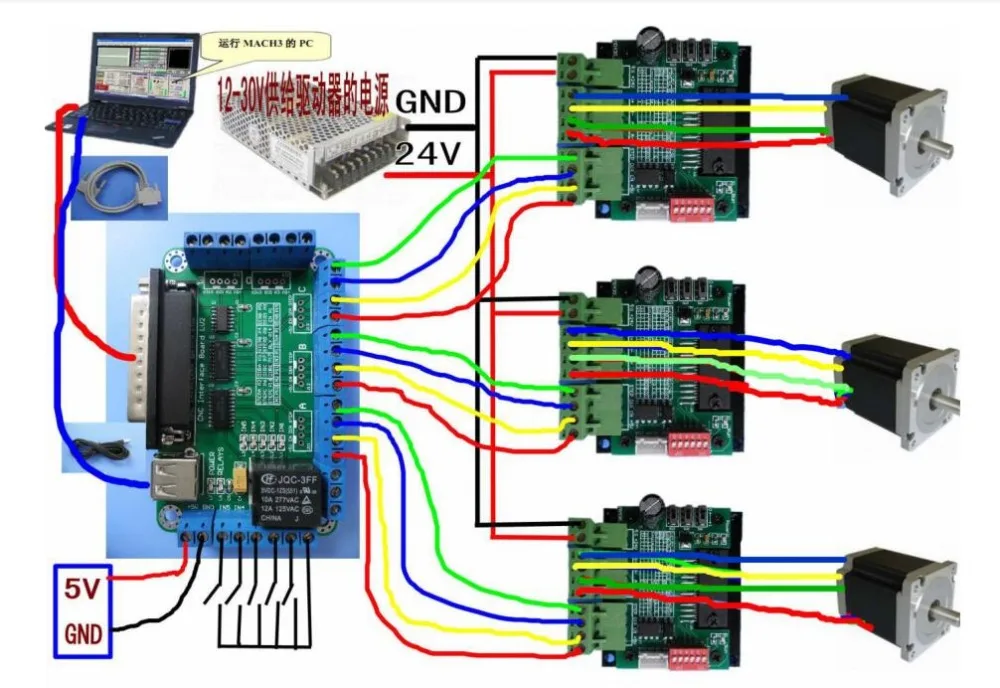 Обычно 4 основных полюса используются для гибридов 3,6° и 8 для 1,8° и 0,9°.° виды.
Обычно 4 основных полюса используются для гибридов 3,6° и 8 для 1,8° и 0,9°.° виды.
Следующее уравнение показывает взаимосвязь между количеством полюсов ротора, эквивалентными полюсами статора, количеством фаз и углом полного шага шагового двигателя.
Угол шага = 360/(N Ph /Ph) = 360/N
- N 902 58 Ph = количество эквивалентных полюсов на фазу = количество полюсов ротора
- Ph = Количество фаз
- N = Общее количество полюсов для всех фаз вместе = N Ph /Ph
Если шаг зубьев ротора и статора неодинаков, существует более сложная взаимосвязь.
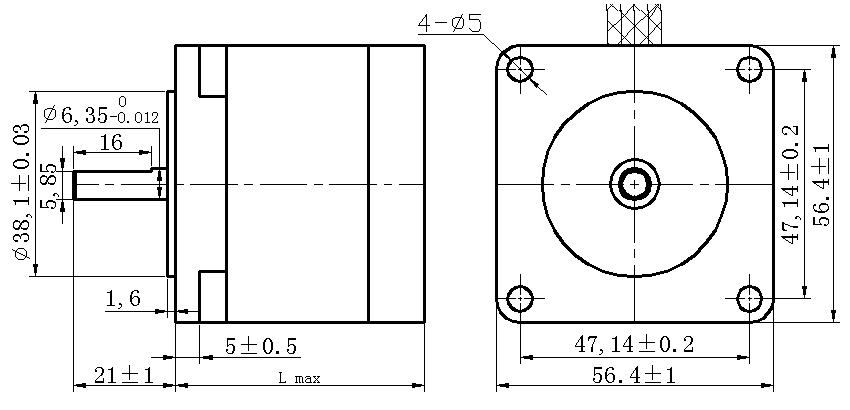
Размер двигателя
Шаговые двигатели классифицируются не только по углу шага, но и по размеру корпуса, который соответствует размеру корпуса двигателя. Например, шаговый двигатель NEMA размера 11 имеет размер корпуса примерно 1,1 дюйма (28 мм).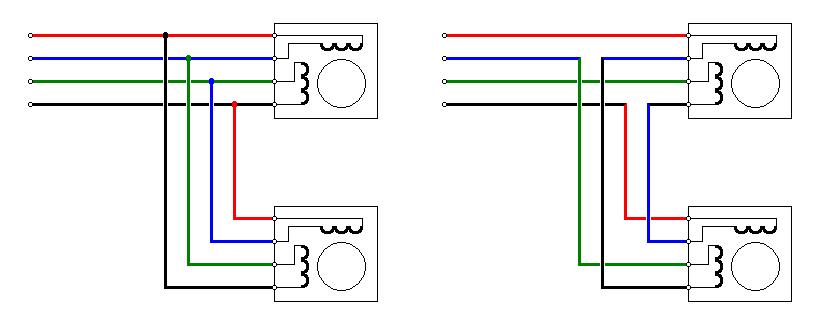 Точно так же шаговый двигатель NEMA размера 23 имеет размер корпуса 2,3 дюйма (57 мм) и т. д. Однако длина корпуса может варьироваться от двигателя к двигателю в рамках одной и той же классификации размеров корпуса. Вообще говоря, доступный крутящий момент двигателя определенного размера рамы будет увеличиваться с увеличением длины корпуса.
Точно так же шаговый двигатель NEMA размера 23 имеет размер корпуса 2,3 дюйма (57 мм) и т. д. Однако длина корпуса может варьироваться от двигателя к двигателю в рамках одной и той же классификации размеров корпуса. Вообще говоря, доступный крутящий момент двигателя определенного размера рамы будет увеличиваться с увеличением длины корпуса.
Крутящий момент двигателя
Выходной крутящий момент и мощность шагового двигателя зависят от размера двигателя, тепловыделения двигателя, рабочего цикла, обмотки двигателя и типа используемого привода. Если шаговый двигатель работает без нагрузки во всем диапазоне частот, одна или несколько точек резонанса собственных колебаний могут быть обнаружены либо по звуку, либо с помощью датчиков вибрации. Полезный крутящий момент шагового двигателя может быть резко снижен за счет резонансов. Следует избегать операций на резонансных частотах. Для уменьшения эффекта резонанса можно использовать внешнее демпфирование, дополнительную инерцию или микрошаговый привод.
В шаговом двигателе крутящий момент возникает, когда магнитные потоки ротора и статора смещаются друг относительно друга. Интенсивность магнитного потока и, следовательно, крутящий момент пропорциональны количеству витков обмотки и току и обратно пропорциональны длине пути магнитного потока. По мере увеличения скорости вращения время, необходимое для нарастания тока, становится значительной частью интервала между шаговыми импульсами. Это снижает средний уровень тока, поэтому крутящий момент будет падать на более высоких скоростях.
Разрешение и точность позиционирования
Разрешение и точность позиционирования системы шагового двигателя зависят от нескольких факторов: угла шага (длина полного шага шагового двигателя), выбранного режима привода (полный шаг, полушаг). шаг или микрошаг) и скорость передачи. Это означает, что существует несколько различных комбинаций, которые можно использовать для получения желаемого разрешения. Из-за этого проблема разрешения конструкции шагового двигателя обычно может быть решена после определения размера двигателя и типа привода.
Из-за этого проблема разрешения конструкции шагового двигателя обычно может быть решена после определения размера двигателя и типа привода.
Резюме: Пошаговое руководство по выбору
Шаг первый: Определение компонента приводного механизма
Определите механизм и требуемые характеристики. Во-первых, определите некоторые особенности конструкции, такие как механизм, приблизительные размеры, пройденные расстояния и период позиционирования.
Шаг второй: Рассчитайте требуемое разрешение
Найдите требуемое для двигателя разрешение. По требуемому разрешению определите, будет ли использоваться только двигатель или мотор-редуктор. Однако, используя технологию микрошага, достижение необходимого разрешения становится очень простым.
Шаг 3.
 Определите режим работы
Определите режим работы
Определите режим работы, соответствующий требуемым спецификациям. Найдите период разгона (торможения) и скорость рабочего импульса, чтобы рассчитать момент ускорения.
Шаг четвертый: Рассчитайте требуемый крутящий момент
Рассчитайте момент нагрузки и ускоряющий момент и найдите требуемый крутящий момент двигателя.
Шаг пятый: выберите двигатель
Сделайте предварительный выбор двигателя на основе требуемого крутящего момента. Определите двигатель, который будет использоваться, по характеристикам скорость-момент.
Шаг шестой: Проверьте выбранный двигатель
Подтвердите коэффициент ускорения/замедления и коэффициент инерции.
Что дальше…
Теперь у вас есть четкое представление о том, как правильно выбрать шаговый двигатель для вашего конкретного приложения.