Содержание
конструкция, принцип работы, классификация, характеристики
Постоянное совершенствование технологий и развитие точного электрооборудования приводит к созданию новых и преобразованию старых устройств. Такому совершенствованию подвергаются и электрические машины, которые неоднократно преобразовывались для получения точного позиционирования. При массовом внедрении полупроводниковых приборов появилась возможность заменить классические щетки на p-n переходы, в результате чего был создан вентильный двигатель.
Конструкция и принцип работы
Конструктивно вентильный агрегат представляет собой разновидность синхронного двигателя.
В его состав входят:
- Ротор, как правило, из магнитного материала, реагирующий на воздействие электромагнитного поля.
- Статор, включающий в себя фазы обмоток, намотанные в катушки станину и диэлектрическую прокладку.
- Измерительные датчики (чаще всего Холла), позволяющие определить положение вращения вала.

- Микропроцессорный блок, формирующий импульсы, их форму, задающие частоту вращения ротора, сравнивающий показания датчиков и подаваемого переменного тока на фазные обмотки.

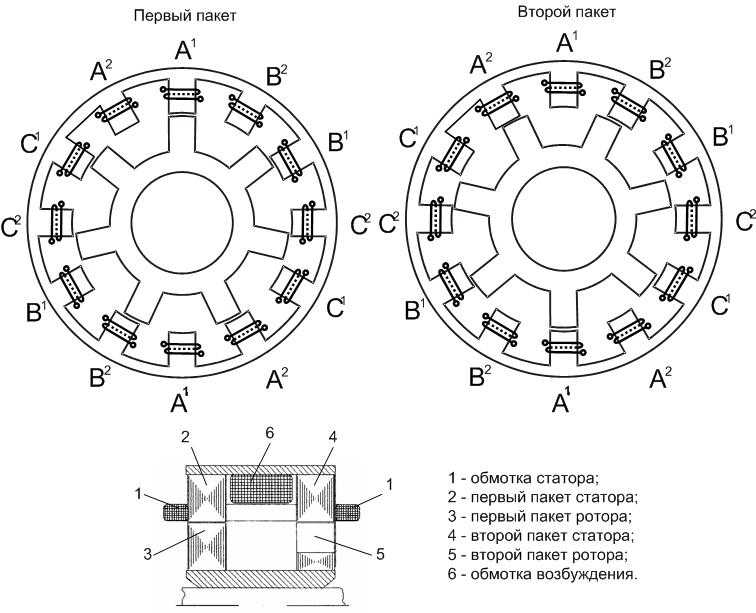
Пример конструкции вентильного двигателя приведен на рисунке ниже:
Рис. 1. Конструкция вентильного двигателя
Принцип работы вентильного двигателя заключается в четком позиционировании постоянных магнитов на роторе по отношению к формируемому пику электромагнитного импульса на фазных электрических обмотках. При движении магнитов датчики воспринимают информацию об их положении в пространстве и меняют пропускную способность реактивных вентильных преобразователей, что позволяет валу вращаться дальше. Таким образом, управление вращением осуществляется без использования скользящего контакта, поэтому данная категория электрических машин относится к категории бесколлекторных электродвигателей.
Статор
Рис. 2. Конструкция статора вентильного двигателя
Конструктивно статор мало чем отличается от классических моделей синхронных и асинхронных двигателей. Это металлический цельнолитой или наборной магнитопровод, в пазах которого укладываются фазные провода. Количество обмоток якоря определяется числом подключаемых фаз и периодичностью их чередования. Чем чаще уложены обмотки статора, тем точнее контролируется вращение вентильного электродвигателя.
Это металлический цельнолитой или наборной магнитопровод, в пазах которого укладываются фазные провода. Количество обмоток якоря определяется числом подключаемых фаз и периодичностью их чередования. Чем чаще уложены обмотки статора, тем точнее контролируется вращение вентильного электродвигателя.
Полюса статора также могут характеризоваться смещением на строго определенный угол, как и его обмотки. По количеству фаз коммутации вентильные двигатели бывают двух-, трех-, четырех- и шестифазными.
Ротор
В зависимости от конструкции ротора бесконтактные двигатели могут иметь внутрироторное и внешнероторное исполнение.
Рис. 3. Внешнероторные и внутрироторные модели
Количество пар полюсов также может отличаться, но уже без каких-либо привязок к обмоткам, как правило, этот параметр варьируется от двух до шестнадцати с парным шагом.
В более старых моделях для бесколлекторных двигателей использовались постоянные магниты из ферритовых сплавов. Которые отличались доступностью и относительно более низкой себестоимостью, но имели слишком низкие показатели индукции.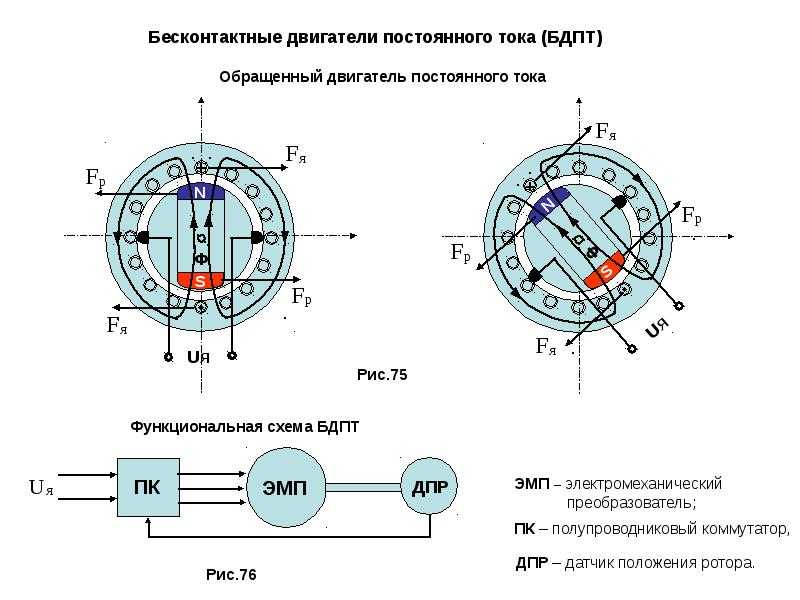 Однако с постепенным развитием технологий, на смену им пришли магнитные элементы из редкоземельных металлов. Этот вариант обладает более точным позиционированием, но и стоит он дороже.
Однако с постепенным развитием технологий, на смену им пришли магнитные элементы из редкоземельных металлов. Этот вариант обладает более точным позиционированием, но и стоит он дороже.
Рис. 4. Вентильный двигатель с внешним ротором
Датчик положения ротора
В синхронных электродвигателях датчик необходим для осуществления обратной связи с положением вала механического устройства. В зависимости от принципа действия могут применяться датчики:
- Фотоэлектрического принципа действия;
- Трансформаторного;
- Индуктивного;
- На эффекте Холла.
Рис. 5. Датчик положения ротора
Наиболее распространенными вариантами для практической реализации стали фотоэлектрические датчики и датчики с эффектом Холла. Они обладают большей точностью и меньше запаздывают при передаче данных в канале связи. Датчики привязываются к определенным маркерам на валу и реагируют на их прохождение.
Система управления
В состав блока управления, как правило, входит микроконтроллер и электронный ключ для подключения к двух- или трехфазным обмоткам двигателя. Микроконтроллер или микропроцессор необходим для обработки получаемых с датчиков сигналов и последующего преобразования синусоидальной коммутации в более удобную форму сигнала. Электрические преобразователи выполняется на базе полупроводниковых транзисторов, соединенных по мостовой схеме. Они производят широтно-импульсную модуляцию питающего напряжения в соответствии с заданным режимом работы.
Микроконтроллер или микропроцессор необходим для обработки получаемых с датчиков сигналов и последующего преобразования синусоидальной коммутации в более удобную форму сигнала. Электрические преобразователи выполняется на базе полупроводниковых транзисторов, соединенных по мостовой схеме. Они производят широтно-импульсную модуляцию питающего напряжения в соответствии с заданным режимом работы.
Рис. 6. Электронный ключ вентильного двигателя
Классификация
По типу питания вентильные электрические машины подразделяются на электродвигатели постоянного и переменного тока.
По способу взаимодействия магнитного поля статора и ротора встречаются синхронные, асинхронные и индукторные аппараты.
Помимо этого, в зависимости от числа задействованных фаз они разделяются на:
- Однофазные – представляю собой наиболее простой вариант, где используется минимум линий передачи питающего напряжения от блока управления к его обмоткам. Однако в некоторых позиция существует трудность пуска такого вентильного двигателя под нагрузкой.
- Двухфазные – обладают хорошей связью между обмоткой и статором. Но выдают довольно сильные пульсации, которые могут привести к негативным последствиям в работе.
- Трехфазные – наиболее распространенные варианты, способные выдать плавный пуск и нормальный режим работы вентильного двигателя. Характеризуется четным количеством обмоток и хорошими тяговыми характеристиками. К его недостаткам относят лишь чрезмерный шум во время работы.
- Четырехфазные – характеризуются минимальными пульсациями низким пусковым моментом. Но, в сравнении с другими моделями, они имеют высокую себестоимость, из-за чего применяются редко.
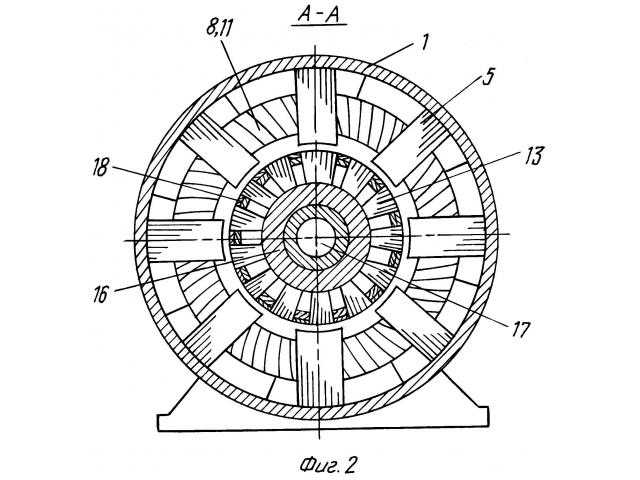
Рис. 7. Четырехфазный вентильный двигатель
Технические характеристики
При выборе конкретной модели важно определить ее соответствие месту установки, поэтому важно обращать внимание на следующие характеристики вентильных двигателей:
- номинальное напряжение – определяет питающую величину, которая должна подаваться на вентильный двигатель для получения номинального усилия;
- потребляемая мощность – характеристика электродвигателя, показывающая величину мощности, расходуемую на работу устройства;
- КПД – показывает соотношение полезной работы, совершаемой вентильным двигателем к израсходованной мощности;
- мощность на валу – полезная работа электрической машины, совершаемая за счет тягового усилия;
- номинальная частота – определяет количество оборотов в минуту, которые вентильный двигатель может совершать в номинальном режиме работы;
- диапазон регулировки частоты – показывает, в каких пределах можно изменять частоту оборотов вала для конкретной модели;
- номинальный крутящий момент – определяет усилие, создаваемое на валу вентильного двигателя при оптимальных параметрах работы, также в параметрах может регламентироваться пусковой и максимальный момент;
- коэффициент нагрузки – показывает, насколько снижается эффективность электрической машины, в зависимости от подъема над уровнем моря;
- габаритные размеры и масса вентильного двигателя.

Преимущества и недостатки
В сравнении с другими типами электрических машин, вентильный двигатель имеет ряд качественных отличий, дающих ему как выгодное, превосходство, так и определенные недостатки.
К преимуществам вентильных двигателей относят:
- Относительно небольшая величина магнитных потерь из-за отсутствия постоянно действующего поля, как в классических синхронных и асинхронных электродвигателях.
- Обеспечивает безопасное вращение даже с максимальной нагрузкой, в отличии от коллекторных электродвигателей.
- За счет встроенного преобразователя частоты коммутация вентильного преобразователя обеспечивает широкий спектр скоростей вращения, которые отличаются плавным переходом от одной к последующей.
- Хорошая динамика работы и точность позиционирования, способная создать конкуренцию шаговым двигателям.
- Относительно большая степень надежности и длительный срок эксплуатации без обслуживания за счет отсутствия скользящего контакта, в отличии от коллекторных двигателей.
- Может применяться во взрывоопасной среде, в отличии от электродвигателей постоянного и переменного тока со щетками.

К недостаткам вентильных агрегатов следует отнести их высокую себестоимость, наличие дополнительных элементов, усложняющих последующую эксплуатацию. Также существенным минусом считается сложность управления и задания логики перемещения рабочих органов трехфазных бесколлекторных двигателей в соответствии с меняющимися факторами производственного процесса.
Применение
Вентильные двигатели применяются во всех сферах, где требуется регулировать скорость вращения рабочего элемента. Такие синхронные приводы имеют точное позиционирование и применяются для компьютерной техники, устройств привода, винчестера, куллеров обдува и т.д.
Рис. 8. Вентильный двигатель в компьютере
Помимо этого он используется в робототехнике, строительстве спутников, летательных аппаратов. Для бытовой техники, в устройствах автомобилестроения, в медицинской сфере. Также нашел широкое применение в станочном оборудовании, горнодобывающих машинах, используется в компрессорных установках и насосных станциях.
конструктивные особенности и принцип действия, преимущества и недостатки, количество фаз
Работа прецизионных систем требует серьёзного контроля. Для выполнения контролирующих функций в таких системах принято использовать вентильный двигатель (ВД), позволяющий повысить вычислительные возможности микроэлектронного оборудования. Он же улучшает свойства электродвигателей постоянного тока, обеспечивая высокую плотность длительного момента.
- Конструктивные особенности
- Принцип действия
- Преимущества и недостатки
- Количество фаз
Конструктивные особенности
Этот тип электромотора имеет стандартную конструкцию. Она состоит из ротора, роль которого выполняет магнитный диск, статоров и подшипников. Все детали заключены в прочный корпус. Статор ВД аналогичен тому, что используется в асинхронных приборах. Основным его элементом выступает стальной сердечник, по периметру которого располагается обмотка из меди. От количества обмоток зависит, к какому типу будет относиться вентильный электродвигатель (однофазному, двухфазному, трёхфазному).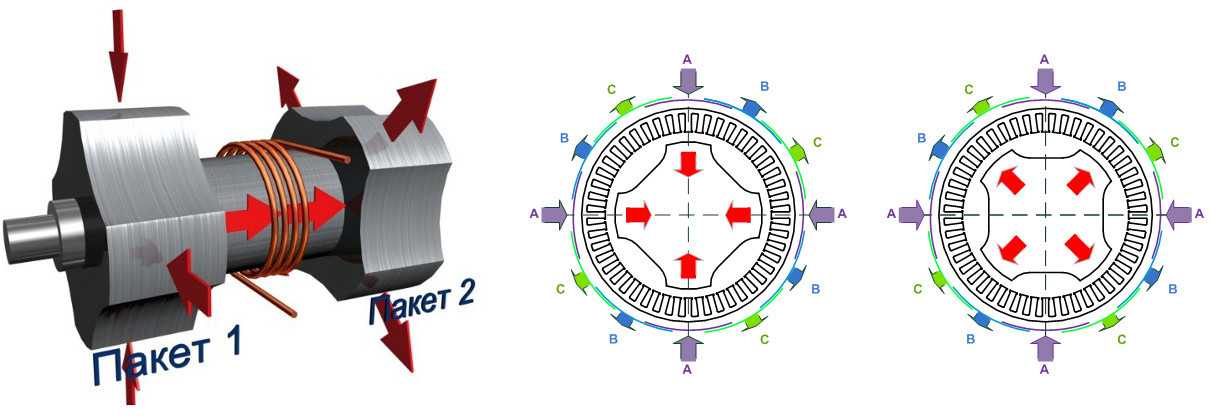
В зависимости от того, как витки обмотки располагаются в статоре, форма его электродвижущей силы может быть:
- Трапецеидальной (BLDC).
- Синусоидальной (PMSM).
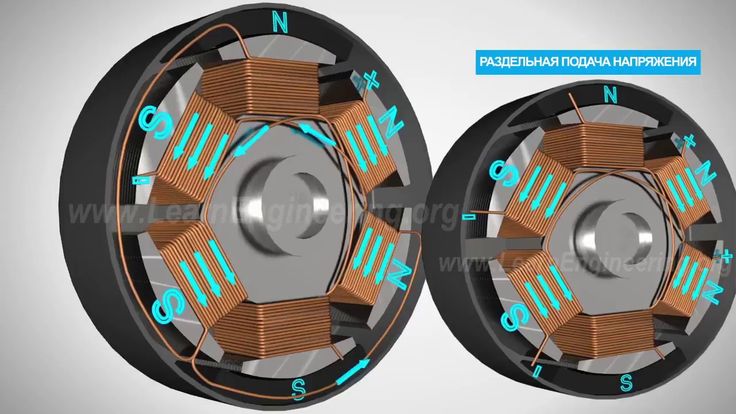
Форма обмотки оказывает прямое влияние на способ питания двигателей. Изменение электрического тока также может происходить синусоидально либо трапецеидально.
Ротор представляет собой несколько магнитов с постоянным полем. Ранее для его производства применялись магниты из феррита. Но уровень их магнитной индукции достаточно мал, поэтому они были заменены на изделия из сплавов редкоземельных элементов, позволяющих достичь необходимого уровня индукции и одновременно сделать ротор более компактным.
Неотъемлемой частью любого вентильного двигателя является датчик положения ротора. В основе его работы может быть заложен:
- фотоэлектрический принцип;
- индуктивный принцип;
- эффект Холла и другие явления.
Фотоэлектрический датчик положения состоит из трёх стационарных фотоприемников, которые поочерёдно закрываются вращающейся шторкой. Её движение синхронно движению ротора. Благодаря двоичному коду, поступающему с датчика, ротор может фиксироваться в шести разных положениях. Преобразуясь в комбинацию управляющих напряжений, сигналы регулируют силовые ключи по особой схеме. Каждая фаза работы электродвигателя задействует два ключа, а подключёнными к сети являются две из трёх обмоток.
Датчик положения фотоэлектрического типа относится к категории самых распространённых, поскольку является практически безынерционным. Также он позволяет исключить запаздывание в канале обратной связи.
Принцип действия
В зависимости от особенностей конструкции и технических характеристик выделяют асинхронный, синхронный и индуктивный вентильный двигатель. Принцип работы каждого из них основывается на индуцировании непостоянных магнитных полюсов на роторе. При подаче напряжения начинается его вращение в соответствии с полюсами статора, вследствие чего сопротивление магнитного поля сводится к минимуму.
При подаче напряжения начинается его вращение в соответствии с полюсами статора, вследствие чего сопротивление магнитного поля сводится к минимуму.
Сведения о состоянии ротора используются в качестве инструмента управления фазой подачи напряжения. Наложение сигналов на угловую ненасыщенную фазу индуктивности осуществляется таким образом, что её максимальное значение совпадает с минимальным сопротивлением полюса.
Чтобы высокие вольт-секунды не оказывали негативного действия на работающую электронику, следует предусмотреть ограничение фазного тока на невысоких скоростях двигателя. Роль ограничителей в этом случае выполняют датчики. При высоких скоростях необходимость в ограничении тока отпадает.
Выровненный угол управляющего напряжения одиночного импульса позволяет оптимизировать производительность оборудования. Процесс её преобразования наглядно демонстрируется в виде траектории реактивной энергии. Преобразованное в механическую энергию питание отвечает за мощностную область. Отключение электроэнергии приводит к тому, что избыточная либо остаточная энергия переходит к статору. Влияние магнитного поля на работающий вентильный электродвигатель является минимальным. Это отличает ВД от других аналогичных устройств.
Отключение электроэнергии приводит к тому, что избыточная либо остаточная энергия переходит к статору. Влияние магнитного поля на работающий вентильный электродвигатель является минимальным. Это отличает ВД от других аналогичных устройств.
Преимущества и недостатки
Электродвигатели такого типа нашли широкое применение в производственной и промышленной сфере. Это обуславливается следующими достоинствами ВД:
- широким интервалом для модифицирования частоты вращения;
- максимально точным позиционированием;
- быстродействием и высокой динамикой;
- экономически выгодным техобслуживанием;
- достаточной защищенностью от взрывов;
- устойчивостью к большим нагрузкам при вращении;
- мягким переключением скоростей;
- хорошим КПД, превышающим 90%;
- большим рабочим ресурсом и сроком службы.
При длительной работе вентильного двигателя не происходит опасного перегрева основных элементов, что делает процесс его эксплуатации более эффективным и безопасным.
Эта разновидность электродвигателя обладает определёнными недостатками. Они выражаются в сложной системе управления и высоком уровне шума в процессе работы. Также к очевидным минусам следует отнести высокую цену, обусловленную применением дорогостоящих постоянных магнитов, используемых при изготовлении ротора.
Количество фаз
Вентильный электродвигатель, как и другие виды устройств, может функционировать от постоянного и переменного тока. Встречаются двигатели, рассчитанные на разное число фаз.
Однофазный относится к категории самых простых, имеющих минимальное количество связей с электроникой. Характеризуется наличием пульсаций, высоким крутящим моментом. Однофазный прибор не может запускаться на всех угловых позициях, используется в установках, где важна высокая скорость.
Двухфазный мотор активирует воздушный зазор, а при дополнительном настраивании в полюсах ротора создаётся асимметрия. Имеет высокий крутящий момент, который может спровоцировать негативные последствия во время эксплуатации.
Имеет высокий крутящий момент, который может спровоцировать негативные последствия во время эксплуатации.
Трехфазное устройство показывает эффективность при запуске и создании крутящего момента без задействования большого числа фаз. При наличии чётного количества полюсов оптимально подходит для техники, в которой важную роль играет высокая мощность при небольшой скорости работы (к примеру, для насосов). В процессе работы создаётся высокий крутящий момент и большой уровень шума.
Четырехфазный двигатель лишён недостатков из-за завышенного крутящего момента и наличия пульсаций. Однако характерная для него высокая мощность и стоимость не позволяет широко использовать такой мотор в различном оборудовании.
Что такое бесщеточный двигатель постоянного тока (BLDC)? Строительство и работа
Бесколлекторные двигатели постоянного тока (BLDC) были в центре внимания многих производителей двигателей, поскольку эти двигатели все чаще используются во многих приложениях, особенно в области технологий управления двигателями.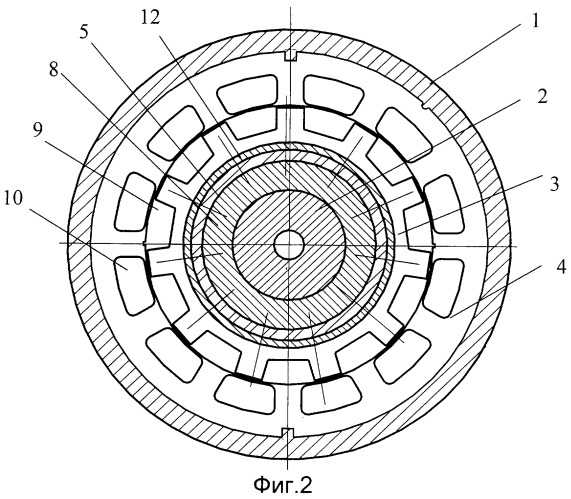 Двигатели BLDC превосходят щеточные двигатели постоянного тока во многих отношениях, таких как способность работать на высоких скоростях, высокая эффективность и лучшее рассеивание тепла.
Двигатели BLDC превосходят щеточные двигатели постоянного тока во многих отношениях, таких как способность работать на высоких скоростях, высокая эффективность и лучшее рассеивание тепла.
Они являются неотъемлемой частью современной приводной техники, чаще всего используемой для приводов, станков, электрических двигателей, робототехники, компьютерной периферии, а также для производства электроэнергии. С развитием бездатчиковой технологии, помимо цифрового управления, эти двигатели стали настолько эффективными с точки зрения общей стоимости системы, размеров и надежности.
- Связанная запись: Разница между щеточным и бесщеточным двигателем
- По теме: Что такое шаговый двигатель? Типы, конструкция, эксплуатация и применение
Содержание
Что такое бесщеточный двигатель постоянного тока (BLDC)?
Бесщеточный двигатель постоянного тока (известный как BLDC) представляет собой синхронный электродвигатель с постоянными магнитами , который приводится в действие электричеством постоянного тока (DC) и реализует систему коммутации с электронным управлением (коммутация — это процесс создания крутящего момента в двигателе). путем изменения фазных токов через него в соответствующие моменты времени) вместо системы механической коммутации. Двигатели BLDC также называют двигателями с трапециевидными постоянными магнитами.
путем изменения фазных токов через него в соответствующие моменты времени) вместо системы механической коммутации. Двигатели BLDC также называют двигателями с трапециевидными постоянными магнитами.
В отличие от обычного двигателя постоянного тока щеточного типа, в котором щетки механически контактируют с коллектором на роторе, образуя электрический путь между источником постоянного тока и обмотками якоря ротора, в двигателе BLDC используется электрическая коммутация с ротором на постоянных магнитах и статором. с последовательностью витков. В этом двигателе вращается постоянный магнит (или полюса поля) и закреплены проводники с током.
Катушки якоря переключаются электронным способом с помощью транзисторов или кремниевых выпрямителей при правильном положении ротора таким образом, что поле якоря находится в пространственной квадратуре с полюсами поля ротора. Следовательно, сила, действующая на ротор, заставляет его вращаться. 9Датчики Холла 0004 или энкодеры чаще всего используются для определения положения ротора и располагаются вокруг статора. Обратная связь о положении ротора от датчика помогает определить, когда следует переключать ток якоря.
Обратная связь о положении ротора от датчика помогает определить, когда следует переключать ток якоря.
Это электронное коммутационное устройство исключает использование коммутатора и щеток в двигателе постоянного тока и, следовательно, обеспечивает более надежную и менее шумную работу. Благодаря отсутствию щеток двигатели BLDC способны работать на высоких скоростях. КПД двигателей BLDC обычно составляет от 85 до 9.0 процентов, тогда как двигатели постоянного тока коллекторного типа имеют КПД от 75 до 80 процентов. Доступны самые разные двигатели BLDC, начиная от малого диапазона мощности и заканчивая дробной мощностью, интегральной мощностью и большими диапазонами мощности.
- Связанный пост: Серводвигатель — типы, конструкция, работа и применение
Конструкция двигателя BLDC
Двигатели BLDC могут иметь различные физические конфигурации. В зависимости от обмоток статора они могут быть сконфигурированы как однофазные, двухфазные или трехфазные двигатели.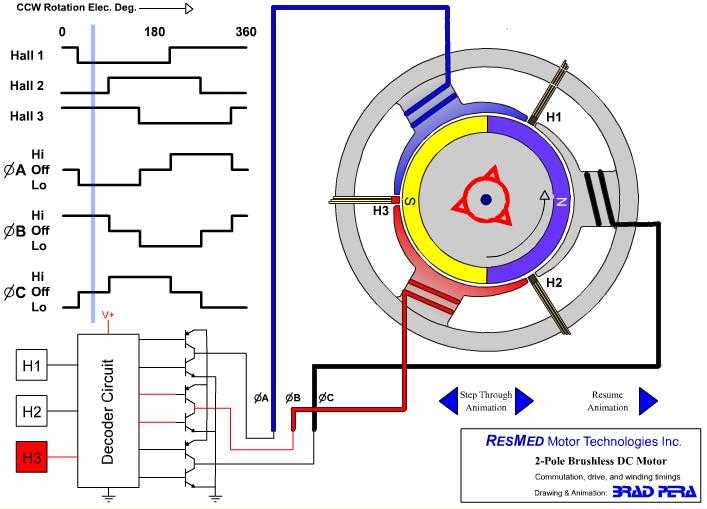 Однако чаще всего используются трехфазные двигатели BLDC с ротором на постоянных магнитах.
Однако чаще всего используются трехфазные двигатели BLDC с ротором на постоянных магнитах.
Конструкция этого двигателя во многом похожа на трехфазный асинхронный двигатель, а также на обычный двигатель постоянного тока. Этот двигатель имеет части статора и ротора, как и все другие двигатели.
- Связанный пост Расчет размера кабеля для двигателей LT и HT
Статор электродвигателя постоянного тока, состоящий из стальных пластин, несущих обмотки. Эти обмотки размещены в пазах, прорезанных в осевом направлении по внутренней периферии статора. Эти обмотки могут быть расположены либо звездой, либо треугольником. Однако большинство двигателей BLDC имеют трехфазный статор, соединенный звездой.
Каждая обмотка состоит из множества соединенных между собой катушек, при этом одна или несколько катушек размещаются в каждом слоте. Для образования четного числа полюсов каждая из этих обмоток распределяется по периферии статора.
Статор должен быть выбран с правильным номинальным напряжением в зависимости от мощности источника питания.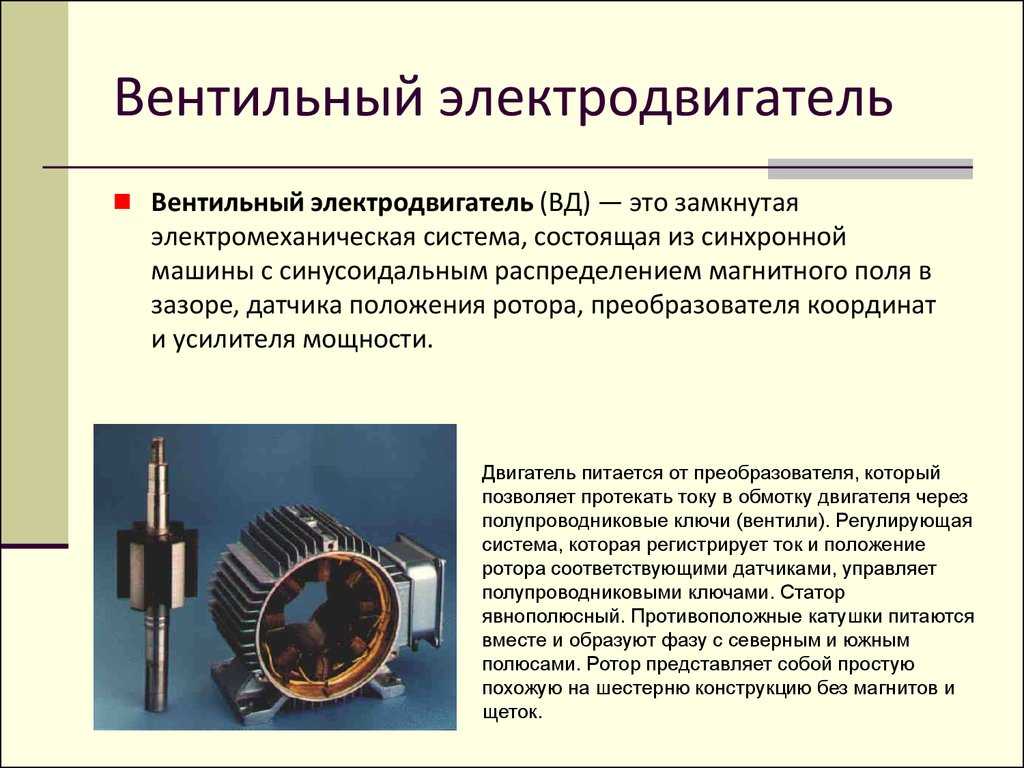 Для робототехники, автомобилей и небольших исполнительных механизмов предпочтительны двигатели BLDC с напряжением 48 В или менее. Для промышленных применений и систем автоматизации используются двигатели с номинальным напряжением 100 В и выше.
Для робототехники, автомобилей и небольших исполнительных механизмов предпочтительны двигатели BLDC с напряжением 48 В или менее. Для промышленных применений и систем автоматизации используются двигатели с номинальным напряжением 100 В и выше.
- Вы также можете прочитать: Что такое соленоид и магнитное поле соленоида
Ротор
Двигатель BLDC включает в себя постоянный магнит в роторе. Количество полюсов в роторе может варьироваться от 2 до 8 пар полюсов с чередованием южных и северных полюсов в зависимости от требований применения. Для достижения максимального крутящего момента в двигателе плотность потока материала должна быть высокой. Для создания необходимой плотности магнитного поля необходим соответствующий магнитный материал для ротора.
Ферритовые магниты недороги, однако они имеют низкую магнитную индукцию для данного объема. Магниты из редкоземельных сплавов обычно используются для новых конструкций. Некоторыми из этих сплавов являются самарий-кобальт (SmCo), неодим (Nd) и феррит и бор (NdFeB). Ротор может иметь различные конфигурации сердечника, такие как круглый сердечник с постоянным магнитом на периферии, круглый сердечник с прямоугольными магнитами и т. д.
Ротор может иметь различные конфигурации сердечника, такие как круглый сердечник с постоянным магнитом на периферии, круглый сердечник с прямоугольными магнитами и т. д.
- Связанный пост: Что такое КПД двигателя и как его повысить?
Датчики Холла
Датчик Холла предоставляет информацию для синхронизации возбуждения якоря статора с положением ротора. Поскольку коммутация двигателя BLDC управляется электронным способом, обмотки статора должны быть запитаны последовательно, чтобы двигатель вращался. Перед включением определенной обмотки статора необходимо подтвердить положение ротора. Таким образом, датчик Холла, встроенный в статор, определяет положение ротора.
Большинство двигателей BLDC оснащены тремя датчиками Холла, встроенными в статор. Каждый датчик генерирует сигналы Low и High всякий раз, когда полюса ротора проходят рядом с ним. Точная последовательность коммутации обмотки статора может быть определена на основе комбинации отклика этих трех датчиков.
- Связанный пост Почему мощность электродвигателей указана в кВт, а не в кВА?
Принцип работы и принцип действия бесконтактного двигателя постоянного тока
Принцип работы бесконтактного двигателя постоянного тока аналогичен принципу работы обычного двигателя постоянного тока, т. е. действует закон силы Лоренца, согласно которому всякий раз, когда проводник с током помещается в магнитное поле, он испытывает сила. Вследствие силы реакции магнит будет испытывать равную и противоположную силу. В случае двигателя BLDC проводник с током неподвижен, а постоянный магнит движется.
При электрическом переключении катушек статора источником питания он становится электромагнитом и начинает создавать однородное поле в воздушном зазоре. Хотя источником питания является постоянный ток, коммутация заставляет генерировать сигнал переменного напряжения трапециевидной формы. За счет силы взаимодействия статора электромагнита и ротора с постоянными магнитами ротор продолжает вращаться.
Рассмотрим рисунок ниже, на котором статор двигателя возбуждается в зависимости от различных состояний переключения. При переключении обмоток как высокого и низкого сигналов соответствующие обмотки запитываются как северный и южный полюса. Ротор с постоянными магнитами с северным и южным полюсами совпадает с полюсами статора, заставляя двигатель вращаться.
Обратите внимание, что двигатель создает крутящий момент из-за развития сил притяжения (при выравнивании север-юг или юг-север) и сил отталкивания (при выравнивании север-север или юг-юг). Таким образом, двигатель движется по часовой стрелке.
Здесь может возникнуть вопрос, откуда мы знаем, какая катушка статора должна быть под напряжением и когда это делать. Это потому что; непрерывное вращение двигателя зависит от последовательности переключения катушек. Как обсуждалось выше, датчики Холла передают информацию о положении вала в электронный блок управления.
На основании этого сигнала от датчика контроллер принимает решение о включении определенных катушек. Датчики Холла генерируют сигналы низкого и высокого уровня всякий раз, когда полюса ротора проходят рядом с ним. Эти сигналы определяют положение вала.
Датчики Холла генерируют сигналы низкого и высокого уровня всякий раз, когда полюса ротора проходят рядом с ним. Эти сигналы определяют положение вала.
- Вы также можете прочитать: Термины и определения, относящиеся к управлению и защите двигателя
Бесщеточный двигатель постоянного тока
Как описано выше, схема электронного контроллера подает питание на соответствующую обмотку двигателя, поворачивая транзистор или другие полупроводниковые переключатели для непрерывного вращения двигателя. На рисунке ниже показаны простая схема привода двигателя BLDC , которая состоит из моста MOSFET (также называемого инверторным мостом), электронного контроллера, датчика Холла и двигателя BLDC.
Здесь датчики Холла используются для обратной связи по положению и скорости. Электронный контроллер может быть блоком микроконтроллера или микропроцессором, или процессором DSP, или блоком FPGA, или любым другим контроллером. Этот контроллер получает эти сигналы, обрабатывает их и отправляет управляющие сигналы в схему драйвера MOSFET.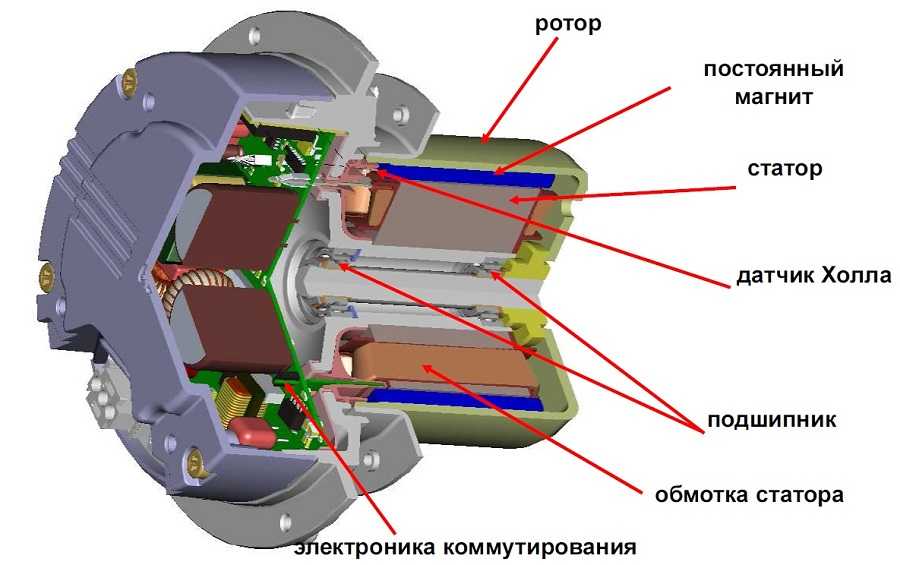
В дополнение к переключению на номинальную скорость двигателя дополнительная электронная схема изменяет скорость двигателя в зависимости от требуемого применения. Эти блоки управления скоростью обычно реализуются с ПИД-контроллерами для точного управления. Также можно обеспечить работу двигателя в четырех квадрантах, сохраняя при этом хороший КПД при изменении скорости с использованием современных приводов.
Сопутствующие электрические приводы Статьи
- Приводы постоянного тока – Конструкция, работа и классификация электрических приводов постоянного тока
- Электрические приводы и – Классификация приводов переменного тока и ЧРП
Преимущества двигателя BLDC
Двигатель BLDC имеет несколько преимуществ по сравнению с обычными двигателями постоянного тока, некоторые из них:
- У него нет механического коммутатора и связанных с этим проблем
- Высокая эффективность благодаря использованию ротора с постоянными магнитами
- Высокая скорость работы даже в нагруженном и ненагруженном состоянии за счет отсутствия ограничивающих скорость щеток
- Меньшая геометрия двигателя и меньший вес, чем у щеточных двигателей постоянного тока и асинхронных двигателей переменного тока
- Долгий срок службы, поскольку коллекторная система не требует осмотра и технического обслуживания
- Более высокая динамическая характеристика благодаря малой инерции и несущим обмоткам в статоре
- Меньше электромагнитных помех
- Тихая работа (или низкий уровень шума) из-за отсутствия щеток
Недостатки бесщеточного двигателя
- Эти двигатели дорогие
- Электронный контроллер требует управления, этот двигатель стоит дорого
- Недостаточно многих интегрированных электронных решений для управления, особенно для крошечных двигателей BLDC
- Требуется сложная схема привода
- Необходимость дополнительных датчиков
Вы также можете прочитать: Подключение трехфазного двигателя звезда/треугольник (Y-Δ) назад/вперед с таймером питания и схема управления
Применение бесщеточных двигателей постоянного тока (BLDC)
Бесколлекторные двигатели постоянного тока (BLDC) используются для широкого спектра приложений, таких как переменные нагрузки, постоянные нагрузки и позиционирование в областях промышленного управления, автомобилестроения, авиации, систем автоматизации, медицинского оборудования и т. д.
д.
- Компьютерные жесткие диски и проигрыватели DVD/CD
- Электромобили, гибридные автомобили и электрические велосипеды
- Промышленные роботы, станки с ЧПУ и простые системы с ременным приводом
- Стиральные машины, компрессоры и сушилки
- Вентиляторы, насосы и воздуходувки
Related Posts
- Однофазный асинхронный двигатель – конструкция, работа, типы и применение
- Трехфазный асинхронный двигатель – конструкция, работа, типы и применение
- Разница между однофазным и трехфазным асинхронным двигателем
- Схемы подключения питания и управления трехфазным двигателем
Показать полную статью
Связанные статьи
Кнопка «Вернуться к началу»
Как работают бесщеточный двигатель и ESC
В этом уроке мы узнаем, как работают бесщеточный двигатель и ESC. Эта статья является первой частью следующего видео, где мы изучим принцип работы бесколлекторного двигателя постоянного тока и ESC (электронного регулятора скорости), а во второй части мы узнаем, как управлять бесщеточным двигателем постоянного тока с помощью Arduino.
Вы можете посмотреть следующее видео или прочитать письменный учебник ниже.
Как это работает
BLDC двигатель состоит из двух основных частей, статора и ротора. Для этой иллюстрации ротор представляет собой постоянный магнит с двумя полюсами, а статор состоит из катушек, расположенных, как показано на рисунке ниже.
Все мы знаем, что если подать ток через катушку, она создаст магнитное поле, а линии или полюса магнитного поля зависят от направления тока.
Итак, если мы применим соответствующий ток, катушка создаст магнитное поле, которое будет притягивать постоянный магнит ротора. Теперь, если мы активируем каждую катушку одну за другой, ротор будет продолжать вращаться из-за силового взаимодействия между перманентом и электромагнитом.
Чтобы повысить эффективность двигателя, мы можем намотать две противоположные катушки как одну катушку таким образом, чтобы полюса были противоположны полюсам ротора, таким образом, мы получим двойную силу притяжения.
С этой конфигурацией мы можем создать шесть полюсов на статоре всего с тремя катушками или фазой. Мы можем еще больше повысить эффективность, подав питание на две катушки одновременно. Таким образом, одна катушка будет притягивать, а другая — отталкивать ротор.
Для того, чтобы ротор совершил полный цикл на 360 градусов, необходимо шесть шагов или интервалов.
Если мы посмотрим на форму волны тока, то увидим, что в каждом интервале есть одна фаза с положительным током, одна фаза с отрицательным током, а третья фаза отключена. Это дает представление о том, что мы можем соединить свободные конечные точки каждой из трех фаз вместе и, таким образом, мы можем разделить ток между ними или использовать один ток для питания двух фаз одновременно.
Вот пример. Если мы подтянем фазу A High или подключим ее к положительному напряжению постоянного тока с помощью какого-либо переключателя, например MOSFET, а с другой стороны соединим фазу B с землей, то ток будет течь от VCC через фазу А, нейтральную точку и фазу В, на землю. Итак, с помощью всего лишь одного потока тока мы создали четыре разных полюса, которые заставляют ротор двигаться.
Итак, с помощью всего лишь одного потока тока мы создали четыре разных полюса, которые заставляют ротор двигаться.
В этой конфигурации у нас фактически есть соединение фаз двигателя звездой, где нейтральная точка соединена внутри, а остальные три конца фаз выходят из двигателя, поэтому из бесщеточного двигателя выходят три провода.
Итак, для того, чтобы ротор прошел полный цикл, нам просто нужно активировать правильные два МОП-транзистора в каждом из 6 интервалов, и это то, для чего на самом деле предназначены ESC.
Как работает ESC (электронный регулятор скорости)
ESC или электронный регулятор скорости управляет движением или скоростью бесщеточного двигателя, активируя соответствующие полевые МОП-транзисторы для создания вращающегося магнитного поля, чтобы двигатель вращался. Чем выше частота или чем быстрее ESC проходит через 6 интервалов, тем выше будет скорость двигателя.
Однако возникает важный вопрос: как узнать, когда какую фазу активировать. Ответ заключается в том, что нам нужно знать положение ротора, и есть два распространенных метода, используемых для определения положения ротора.
Ответ заключается в том, что нам нужно знать положение ротора, и есть два распространенных метода, используемых для определения положения ротора.
Первый распространенный метод заключается в использовании встроенных в статор датчиков Холла, расположенных под углом 120 или 60 градусов друг к другу.
Когда постоянные магниты ротора вращаются, датчики Холла воспринимают магнитное поле и генерируют логический «высокий» для одного магнитного полюса или логический «низкий» для противоположного полюса. В соответствии с этой информацией ESC знает, когда активировать следующую коммутационную последовательность или интервал.
Второй распространенный метод, используемый для определения положения ротора, заключается в измерении обратной электродвижущей силы или обратной ЭДС. Обратная ЭДС возникает в результате прямо противоположного процесса генерации магнитного поля или когда движущееся или изменяющееся магнитное поле проходит через катушку, оно индуцирует ток в катушке.
Таким образом, когда движущееся магнитное поле ротора проходит через свободную катушку или ту, которая не активна, оно индуцирует ток в катушке, и в результате в этой катушке возникает падение напряжения. ESC фиксирует эти падения напряжения по мере их возникновения и на их основе прогнозирует или рассчитывает, когда должен произойти следующий интервал.
ESC фиксирует эти падения напряжения по мере их возникновения и на их основе прогнозирует или рассчитывает, когда должен произойти следующий интервал.
Таков основной принцип работы бесколлекторных двигателей постоянного тока и регуляторов скорости, и он останется тем же, даже если мы увеличим количество полюсов как ротора, так и статора. У нас по-прежнему будет трехфазный двигатель, только количество интервалов увеличится, чтобы совершить полный цикл.
Здесь мы также можем упомянуть, что двигатели BLDC могут быть инраннерами или аутраннерами. Бесщеточный двигатель с внутренним ротором имеет постоянные магниты внутри электромагнитов, и наоборот, двигатель с наружным ротором имеет постоянные магниты снаружи электромагнитов. Опять же, они используют один и тот же принцип работы, и каждый из них имеет свои сильные и слабые стороны.
Хорошо, хватит теории, а теперь давайте продемонстрируем и посмотрим в реальной жизни то, что мы объяснили выше. Для этого мы подключим три фазы бесщеточного двигателя к осциллографу. Я подключил 3 резистора в одной точке, чтобы создать виртуальную нейтральную точку, а с другой стороны я подключил их к трем фазам двигателя BLDC.
Я подключил 3 резистора в одной точке, чтобы создать виртуальную нейтральную точку, а с другой стороны я подключил их к трем фазам двигателя BLDC.
Первое, что мы можем заметить, это три синусоидальные волны. Эти синусоидальные волны на самом деле являются обратными EFM, генерируемыми в фазах, когда они не активны.
Мы видим, что при изменении оборотов двигателя частота синусоидальных волн меняется, а также их амплитуда. Чем выше число оборотов, тем выше частота и амплитуда синусоидальных волн противоЭДС. Однако то, что приводит в движение двигатель, на самом деле эти пики, которые являются активными фазами, которые генерируют изменяющееся магнитное поле.
Мы можем заметить, что на каждом интервале есть две активные и одна неактивная фаза. Например, здесь у нас активны фазы A и B, а фаза C неактивна. Затем у нас активны фазы A и C, а фаза B неактивна и так далее.
Здесь я хотел бы поблагодарить Banggood.com за предоставление мне этого осциллографа. Это Rigol DS1054Z, и это один из лучших осциллографов начального уровня в своей ценовой категории.