Содержание
Управление биполярным шаговым двигателем. Часть 1. Теория. Схема с контроллером PIC12F629 и драйвером LB1838 — radiohlam.ru
- Часть 1. Теория. Схема с PIC12F629 и драйвером LB1838
- Часть 2. Схема с PIC12F629 и драйвером L293D
Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью можно повернуть вал и на определённое число оборотов, потому что N оборотов — это тоже определённый угол, равный 360*N, и, в том числе, на нецелое число оборотов, например на 0.75 оборота, 2.5 оборота, на 3.7 оборота и т.д. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных устройств: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т.д.
Естественно такие возможности не могли обойти стороной и радиолюбители. Они с успехом используют шаговики в конструкциях самодельных роботов, самодельных станков с ЧПУ и т. д. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
д. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
Итак, что нам понадобится для экспериментов. Во-первых, шаговый двигатель. Я брал 5-ти вольтовый китайский биполярный шаговик с загадочным названием, выдранный из старого 3,5″ дисковода, аналог M20SP-GW15. Во-вторых, поскольку обмотки двигателя потребляют значительный ток (в данном случае до 300 мА), то вполне понятно, что подключить шаговик к контроллеру напрямую не удастся, нужен драйвер.
В качестве драйвера для биполярных шаговых двигателей обычно используют схему так называемого H-моста или специальную микросхему (в которой всё равно встроен H-мост). Можно конечно ваять самому, но я взял готовую микруху (LB1838) из того же старого дисковода. Собственно, кроме всего вышеописанного, для наших экспериментов также понадобятся: PIC-контроллер (был взят PIC12F629, как самый дешёвый) и пара кнопок.
Перед тем, как перейти непосредственно к схеме, давайте немного разберёмся с теорией.
Биполярный шаговый двигатель имеет две обмотки и, соответственно, подключается по четырём проводам. Найти концы обмоток можно простой прозвонкой — концы проводов, относящиеся к одной обмотке, будут между собой звониться, а концы, относящиеся к разным обмоткам, — нет. Концы первой обмотки обозначим буквами «a», «b», а концы второй обмотки буквами «c», «d».
На рассматриваемом экземпляре есть цифровая маркировка контактов возле мотора и цветовая маркировка проводов (бог его знает, может это тоже какой-то стандарт): 1 — красный, 2 — голубой — первая обмотка; 3 — жёлтый, 4 — белый — вторая обмотка.
Для того, чтобы биполярный шаговый двигатель вращался, необходимо запитывать обмотки в порядке, указанном в таблице. Если направление обхода таблицы выбрать сверху вниз по кругу, то двигатель будет вращаться вперёд, если снизу вверх по кругу — двигатель будет вращаться назад:
За один полный цикл двигатель делает четыре шага.
Для правильной работы, должна строго соблюдаться указанная в таблице последовательность коммутаций. То есть, например, после второй комбинации (когда мы подали + на вывод «c» и минус на вывод «d») мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на «a» и + на «b»), тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То есть, например, после второй комбинации (когда мы подали + на вывод «c» и минус на вывод «d») мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на «a» и + на «b»), тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То, с какой комбинации нужно начинать вращение, определяется тем, какая последняя комбинация подавалась на двигатель перед его выключением (если конечно его руками потом не крутили) и желаемым направлением вращения.
То есть, допустим мы повернули двигатель на 5 шагов вперёд, подавая на него комбинации 2-3-4-1-2, потом обесточили, а потом захотели повернуть ещё на один шаг вперёд. Для этого на обмотки надо подать комбинацию 3. Пусть после этого мы его опять обесточили, а через какое-то время захотели вернуть его на 2 шага назад, тогда нам нужно подать на двигатель комбинации 2-1. И так далее в таком же духе.
Эта таблица, кроме всего прочего, позволяет оценить, что будет происходить с шаговым двигателем, если мы перепутаем порядок подключения обмоток или концы в обмотках.
На этом мы закончим с двигателем и перейдём к драйверу LB1838.
У этой микрухи есть четыре управляющие ноги (IN1, IN2, EN1, EN2), на которые мы как раз и будем подавать сигналы с контроллера, и четыре выходных ноги (Out1, Out2, Out3, Out4), к которым подключаются обмотки двигателя. Обмотки подключаются следующим образом: провод «a» подключается к Out1, провод «b» — к Out2, провод «c» — к Out3, провод «d» — к Out4.
Ниже представлена таблица истинности для микросхемы драйвера (состояние выходов в зависимости от состояния входов):
| IN1 | EN1 | Out1 (a) | Out2(b) | IN2 | EN2 | Out3(c) | Out4(d) |
| Low | High | + | — | Low | High | + | — |
| High | High | — | + | High | High | — | + |
| X | Low | откл | откл | X | Low | откл | откл |
Теперь давайте нарисуем на диаграмме, какую форму должны иметь сигналы IN1, EN1, IN2, EN2 для одного полного цикла вращения (4 шага), т. е. чтобы на выходах появились последовательно все 4 комбинации подключения обмоток:
е. чтобы на выходах появились последовательно все 4 комбинации подключения обмоток:
Если присмотреться к этой диаграмме (слева), то становится очевидно, что сигналы IN1 и IN2 можно сделать абсолютно одинаковыми, то есть на обе этих ноги можно подавать один и тот же сигнал. В этом случае наша диаграмма будет выглядеть так:
Итак, на последней диаграмме нарисовано, какие комбинации уровней сигналов должны быть на управляющих входах драйвера (EN1, EN2, IN1, IN2) для того, чтобы получить соответствующие комбинации подключения обмоток двигателя, а также стрелками указан порядок смены этих комбинаций для обеспечения вращения в нужную сторону.
Вот в общем-то и вся теория. Необходимые комбинации уровней на управляющих входах формируются контроллером (мы будем использовать PIC12F629).
Схема:
Элементы: R1..R2 = 1 кОм. Когда соответствующая кнопка не нажата — резистор подтягивает напряжение на входе контроллера к +5 В (высокий уровень). С1, С2 = 0,1 мкФ — керамические конденсаторы. С3 = 470 мкФ х 16В — электролитический конденсатор. |
 При нажатии на кнопку напряжение на входе подтягивается к земле (низкий уровень).
При нажатии на кнопку напряжение на входе подтягивается к земле (низкий уровень).Готовый девайс:
Программа управления реализует следующий алгоритм: при нажатии кнопки КН1 двигатель поворачивается на один шаг в одну сторону, а при нажатии кнопки КН2 — на один шаг в другую сторону.
Простейшая программа управления (.asm + .hex)
Скачать плату в формате DipTrace 2.0
Собственно говоря, можно прикрутить сюда программный UART и реализовать управление от компьютера (передавать с компа скорость, количество шагов и направление вращения).
продолжение (для драйвера L293D)…
Униполярный или биполярный шаговый двигатель: какие различия, что лучше?
Новости
Поздравляем с Днем народного единства!
Уважаемые покупатели! Поздравляем с Днем народного единства!
3 ноября — сокращенный рабочий день с 8. 00 до 15.30, 4, 5, 6 ноября — выходные дни.
00 до 15.30, 4, 5, 6 ноября — выходные дни.
Поздравляем с Днем России!
Уважаемые покупатели, сердечно поздравляем вас с праздником — Днем России! Обращаем ваше внимание, что 13 июня у нас выходной день.
Информация о текущих ценах
Уважаемые покупатели!
В связи с экономической и политической нестабильностью в мире высокий уровень цен по-прежнему сохраняется.
Мы делаем все от нас зависящее, чтобы поддерживать весь необходимый ассортимент и сохранять цены на минимально возможном уровне.
Можем заверить, что снижение цен будет произведено сразу, как только начнется товародвижение на глобальных маршрутах. Читать все новости
В чем принципиальные различия между биполярным и униполярным шаговым двигателем, какой стоит выбрать?
В данной статье будут рассмотрены два типа двухфазных шаговых двигателя — униполярный и биполярный. Подобные названия появились благодаря тому, что в двухфазных шаговых двигателях встречаются два основных типа обмотки катушек, один — биполярный, другой — униполярный. Далее — рассмотрим оба типа подробнее, чтобы разобраться какой из них является более эффективным.
Подобные названия появились благодаря тому, что в двухфазных шаговых двигателях встречаются два основных типа обмотки катушек, один — биполярный, другой — униполярный. Далее — рассмотрим оба типа подробнее, чтобы разобраться какой из них является более эффективным.
Униполярный шаговый двигатель
Униполярные шаговые двигатели, так же как и биполярные, имеют две обмотки, и каждая из них имеет центральный отвод. В зависимости от требуемого направления магнитного поля, в работу включается соответствующая половина обмотки, что достигается простым переключением ключей и существенно упрощает схему драйвера. Подобный механизм позволяет в качестве управляющей системы использовать простейший униполярный драйвер с четырьмя ключами.
Униполярный двухфазный шаговый двигатель имеет шесть выводов. Но так же бывает, что средние отводы катушек внутри соединены, что позволяет шаговому двигателю иметь только пять выводов. Благодаря простоте в эксплуатации, данные двигатели имеют широкую популярность среди как новичков любителей, так и во многих промышленных отраслях, поскольку униполярный шаговый двигатель является самым примитивным и дешевым способом получить высокоточные угловые движения.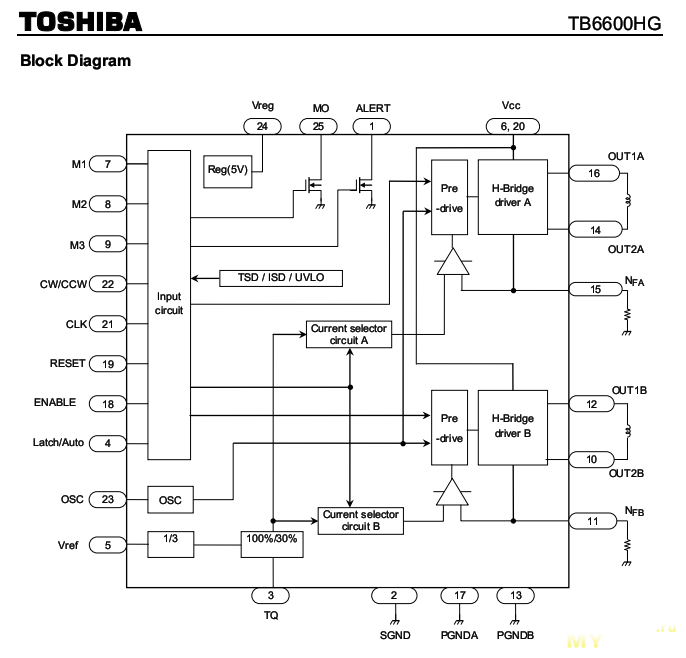
Биполярные шаговые двигатели
С биполярными шаговыми двигателями дело обстоит немного иначе. Данные двигатели имеют только одну обмотку в одной фазе. Биполярные шаговые двигатели, в отличие от униполярных имеют два вывода на одну фазу, ни один из которых не является общим. Управляющая схема биполярного двигателя должна быть намного сложнее, чтобы менять направление магнитного поля с целью изменить направление тока в обмотке. Этого можно достигнуть с помощью схемы H-моста.
Выводы
Биполярные шаговые двигатели немного сложнее в управлении, но при схожих габаритах, биполярный двигатель способен обеспечить больший момент, в сравнении с униполярным. Однако униполярный двигатель, в противовес биполярному, проще в эксплуатации, и вполне сгодится для привода устройств с небольшой мощностью — бытовая техника (стиральная машина, холодильник), магнитофоны и т.д.
DARXTON
Новости
Поздравляем с Днем народного единства!
Уважаемые покупатели! Поздравляем с Днем народного единства!
3 ноября — сокращенный рабочий день с 8. 00 до 15.30, 4, 5, 6 ноября — выходные дни.
00 до 15.30, 4, 5, 6 ноября — выходные дни.
Поздравляем с Днем России!
Уважаемые покупатели, сердечно поздравляем вас с праздником — Днем России! Обращаем ваше внимание, что 13 июня у нас выходной день. Читать все новости
DRV8825 Держатель драйвера шагового двигателя, сильноточный
DRV8824/DRV8825 Держатель драйвера шагового двигателя с размерами. |
|---|
Обзор
Этот продукт представляет собой плату-носитель или коммутационную плату для драйвера шагового двигателя TI DRV8825; поэтому мы рекомендуем внимательно прочитать техническое описание DRV8825 перед использованием этого продукта. Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2,2 А на катушку (см.0017 Рекомендации по рассеиванию мощности (см. раздел ниже для получения дополнительной информации).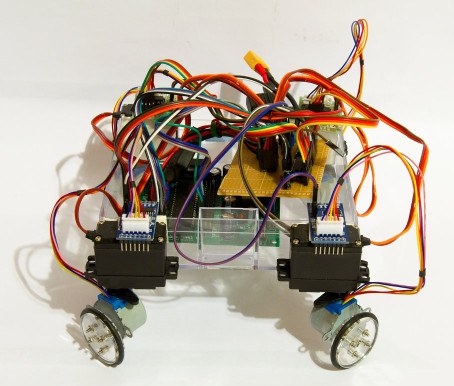 Вот некоторые из ключевых особенностей драйвера:
Вот некоторые из ключевых особенностей драйвера:
- Простой интерфейс управления шагом и направлением
- Шесть различных шагов разрешения: полный шаг, полушаг, 1/4 шага, 1/8 шага, 1/16 шага и 1/32 шага
- Регулируемое управление током позволяет установить максимальный выходной ток с помощью потенциометра, что позволяет использовать напряжения выше номинального напряжения шагового двигателя для достижения более высокой частоты шагов
- Интеллектуальное управление прерыванием, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- Максимальное напряжение питания 45 В
- Встроенный регулятор (не требуется внешний источник питания логики)
- Может напрямую взаимодействовать с системами 3,3 В и 5 В
- Отключение при перегреве, отключение по перегрузке по току и блокировка при пониженном напряжении
- Защита от короткого замыкания на землю и нагрузки
- 4-слойная медная печатная плата весом 2 унции для улучшенного рассеивания тепла
- Открытая площадка для пайки заземления под микросхемой драйвера в нижней части печатной платы
- Размер модуля, схема расположения выводов и интерфейс в большинстве случаев соответствуют размерам наших модулей драйверов шаговых двигателей A4988 (дополнительную информацию см.
 внизу этой страницы)
внизу этой страницы)
 внизу этой страницы)
внизу этой страницы)Обратите внимание, что у нас есть несколько других драйверов шаговых двигателей, которые можно использовать в качестве альтернативы этому модулю (и в качестве замены во многих приложениях): подходит для низковольтных приложений.
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера DRV8825, установленными, как показано на изображении продукта.
Этот продукт поставляется в индивидуальной упаковке с 0,1-дюймовыми контактными штырьками, входящими в комплект, но не припаянными; у нас также есть версия с уже впаянными контактными штырями. Для клиентов, заинтересованных в больших объемах при более низкой удельной стоимости, мы предлагаем версию в упаковке без штырей и версию с установленными штырями.
Некоторыми униполярными шаговыми двигателями (например, с шестью или восемью выводами) этот драйвер может управлять как биполярными шаговыми двигателями. Для получения дополнительной информации см. часто задаваемые вопросы. Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Аппаратное обеспечение в комплекте
Драйвер шагового двигателя DRV8825 поставляется с одним 1×16-контактным отрывным разъемом 0,1 дюйма.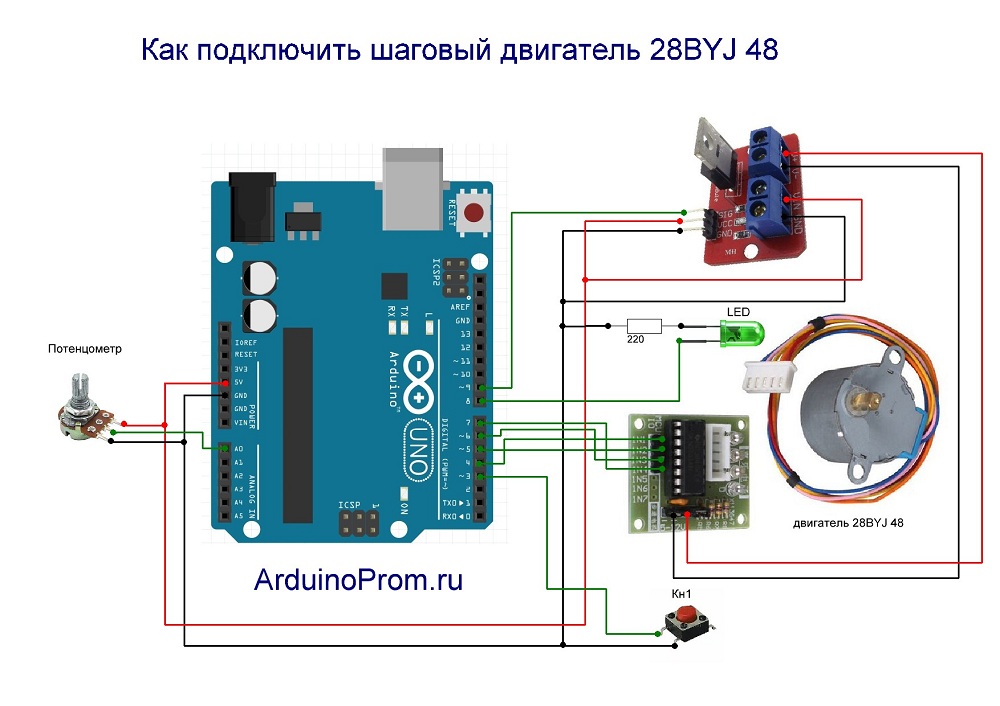 Разъемы можно припаивать для использования с непаянными макетными платами или разъемами 0,1 дюйма. Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными разъемами.)
Разъемы можно припаивать для использования с непаянными макетными платами или разъемами 0,1 дюйма. Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными разъемами.)
Предупреждение: Установка штифтов жатки так, чтобы сторона для шелкографии была вверху, а компоненты внизу, может ограничить диапазон движения подстроечного потенциометра, используемого для установки ограничения тока. Если вы планируете установить контакты разъема в этой ориентации, установите ограничение по току перед пайкой контактов.
Использование драйвера
Минимальная схема подключения микроконтроллера к шасси драйвера шагового двигателя DRV8824/DRV8825 (полношаговый режим). |
|---|
Силовые соединения
Драйверу требуется напряжение питания двигателя 8,2–45 В для подключения к VMOT и GND. Этот источник питания должен иметь соответствующие развязывающие конденсаторы рядом с платой и должен обеспечивать ожидаемый ток шагового двигателя.
Этот источник питания должен иметь соответствующие развязывающие конденсаторы рядом с платой и должен обеспечивать ожидаемый ток шагового двигателя.
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к разрушительным скачкам напряжения LC, особенно при использовании проводов питания длиннее нескольких дюймов. При определенных условиях эти всплески могут превысить максимальное номинальное напряжение 45 В для DRV8825 и привести к необратимому повреждению платы, даже если напряжение питания двигателя составляет всего 12 В. Один из способов защитить драйвер от таких всплесков — поставить большой (не менее 47 мкФ) электролитический конденсатор по мощности двигателя (VMOT) и земле где-то рядом с платой.
Соединения двигателей
Четырех-, шести- и восьмипроводные шаговые двигатели могут управляться DRV8825, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может вывести его из строя. (В более общем случае переподключение чего-либо под напряжением вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигатели обычно имеют спецификацию размера шага (например, 1,8° или 200 шагов на оборот), которая относится к полным шагам. . Микрошаговый драйвер, такой как DRV8825, обеспечивает более высокое разрешение за счет размещения промежуточных ступеней, что достигается за счет питания катушек промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
Входы селектора разрешения (размера шага) (MODE0, MODE1 и MODE2) позволяют выбрать одно из шести ступенчатых разрешений в соответствии с таблицей ниже. Все три входа селектора имеют внутренние подтягивающие резисторы на 100 кОм, поэтому отключение этих трех контактов выбора микрошага приводит к полношаговому режиму.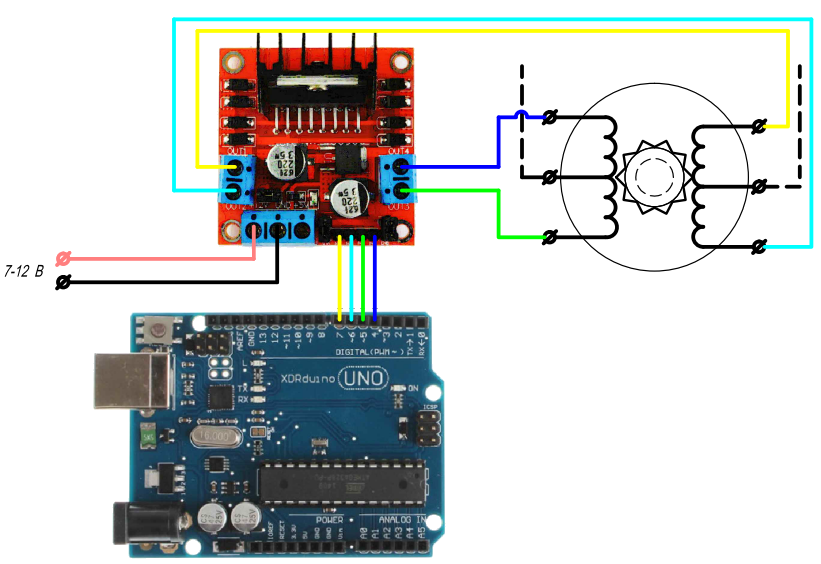 Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
| РЕЖИМ0 | РЕЖИМ1 | РЕЖИМ2 | Разрешение микрошага |
|---|---|---|---|
| Низкий | Низкий | Низкий | Полный шаг |
| Высокий | Низкий | Низкий | Полушаг |
| Низкий | Высокий | Низкий | 1/4 ступень |
| Высокий | Высокий | Низкий | 1/8 шаг |
| Низкий | Низкий | Высокий | Шаг 1/16 |
| Высокий | Низкий | Высокий | Шаг 1/32 |
| Низкий | Высокий | Высокий | Шаг 1/32 |
| Высокий | Высокий | Высокий | Шаг 1/32 |
Входы управления
Каждый импульс на вход STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR. Эти входы по умолчанию имеют низкий уровень через внутренние резисторы 100 кОм. Если вы просто хотите вращение в одном направлении, вы можете оставить DIR отключенным.
Эти входы по умолчанию имеют низкий уровень через внутренние резисторы 100 кОм. Если вы просто хотите вращение в одном направлении, вы можете оставить DIR отключенным.
Микросхема имеет три различных входа для управления состоянием питания: RESET, SLEEP и ENBL. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что драйвер подает низкий уровень на вывод SLEEP через внутренний понижающий резистор на 1 МОм, а на выводы RESET и ENBL — через внутренние понижающие резисторы на 100 кОм. Эти состояния RESET и SLEEP по умолчанию не позволяют драйверу работать; оба этих контакта должны иметь высокий уровень, чтобы активировать драйвер (они могут быть подключены непосредственно к логическому «высокому» напряжению между 2,2 и 5,25 В, или ими можно динамически управлять через подключения к цифровым выходам MCU). По умолчанию вывод ENBL включен, поэтому этот вывод можно оставить отключенным.
Схема контактов nSLEEP и nFAULT на шасси DRV8824/DRV8825/DRV8834. |
|---|
DRV8825 также имеет выход FAULT, который подает низкий уровень всякий раз, когда полевые транзисторы H-моста отключены в результате защиты от перегрузки по току или теплового отключения. Несущая плата соединяет этот вывод с выводом SLEEP через резистор 10 кОм, который действует как подтягивающий сигнал FAULT всякий раз, когда SLEEP внешне удерживается высоким, поэтому на выводе FAULT нет необходимости во внешнем подтягивании. Обратите внимание, что носитель включает в себя защитный резистор 1,5 кОм последовательно с выводом FAULT, что делает безопасным подключение этого вывода непосредственно к источнику логического напряжения, что может произойти, если вы используете эту плату в системе, предназначенной для совместимого по выводам A49.88 перевозчик. В такой системе резистор 10 кОм между SLEEP и FAULT затем будет действовать как подтягивающий для SLEEP, делая носитель DRV8825 более прямой заменой A4988 в таких системах (A4988 имеет внутреннюю подтяжку на SLEEP). штырь). Чтобы сбои не отключали контакт SLEEP, любой внешний подтягивающий резистор, который вы добавляете к входу контакта SLEEP, не должен превышать 4,7 кОм.
штырь). Чтобы сбои не отключали контакт SLEEP, любой внешний подтягивающий резистор, который вы добавляете к входу контакта SLEEP, не должен превышать 4,7 кОм.
Ограничение тока
Для достижения высокой скорости шага питание двигателя обычно намного выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А при сопротивлении катушки 5 Ом, что указывает на максимальное напряжение питания двигателя 5 В. Использование такого двигателя с напряжением 12 В позволит увеличить скорость шага, но ток должен активно ограничивать до 1 А, чтобы предотвратить повреждение двигателя.
DRV8825 поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате можно использовать для установки ограничения тока. Обычно вам нужно установить ограничение тока драйвера на уровне или ниже номинального тока вашего шагового двигателя. Один из способов установить ограничение тока — перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, без тактирования входа STEP. Измеренный ток будет в 0,7 раза превышать предельный ток (поскольку обе катушки всегда включены и ограничены примерно 70% от установленного предельного тока в полношаговом режиме).
Один из способов установить ограничение тока — перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, без тактирования входа STEP. Измеренный ток будет в 0,7 раза превышать предельный ток (поскольку обе катушки всегда включены и ограничены примерно 70% от установленного предельного тока в полношаговом режиме).
Другим способом установки ограничения тока является измерение напряжения на контакте «ref» и вычисление результирующего ограничения тока (резисторы измерения тока: 0,100 Ом ). Напряжение опорного вывода доступно через переходное отверстие, обведенное кружком на нижней части печатной платы. Ограничение тока в амперах относится к эталонному напряжению в вольтах следующим образом:
«text(Current Limit) = text(VREF) * 2«
или, преобразованное для решения для VREF:
«text(VREF ) = текст (текущий предел) / 2«
Так, например, если у вас есть шаговый двигатель, рассчитанный на 1 А, вы можете установить ограничение тока на 1 А, установив опорное напряжение на 0,5 В.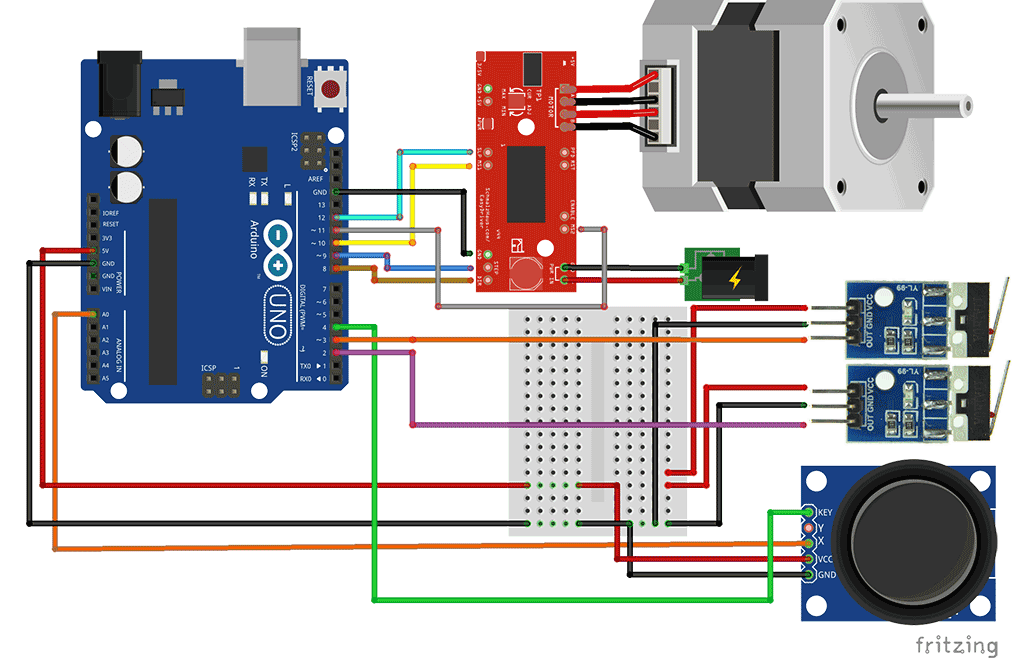
Примечание: Ток катушки может сильно отличаться от ток источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока. Подходящим местом для установки вашего амперметра является последовательное соединение с одной из катушек вашего шагового двигателя.
Вопросы рассеяния мощности
ИС драйвера DRV8825 имеет максимальный номинальный ток 2,5 А на катушку, но токоизмерительные резисторы дополнительно ограничивают максимальный ток до 2,2 А, и фактический ток, который вы можете обеспечить, зависит от того, насколько хорошо вы можете охлаждать ИС. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более примерно 1,5 А на катушку требуется радиатор или другой метод охлаждения.
Этот продукт может нагреть до такой степени, что обожжет вас задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами. Кроме того, обратите внимание, что ток катушки зависит от установленного предела тока, но не обязательно.0017 равно настройке ограничения тока. Фактический ток через каждую катушку изменяется с каждым микрошагом. См. техническое описание DRV8825 для получения дополнительной информации.
Схематическая диаграмма
Схематическая диаграмма держателя драйвера шагового двигателя DRV8824/DRV8825. |
|---|
Токоизмерительные резисторы (R2 и R3) на шасси DRV8825 имеют сопротивление 0,100 Ом. Эта схема также доступна для скачивания в формате pdf (196k pdf).
Основные различия между DRV8825 и A4988
Платформа DRV8825 была разработана таким образом, чтобы быть максимально похожей на наши опоры драйвера шагового двигателя A4988, и ее можно использовать в качестве замены для держателя A4988 во многих приложениях, поскольку он имеет общие тот же размер, распиновка и общий интерфейс управления. Однако следует отметить несколько различий между двумя модулями:
Драйвер шагового двигателя DRV8825. |
|---|
Держатель драйвера шагового двигателя A4988, Black Edition (показан с оригинальными зелеными резисторами измерения тока 50 мОм). |
|---|
- Вывод, используемый для подачи логического напряжения на A4988, используется в качестве выхода FAULT DRV8825, поскольку DRV8825 не требует питания логики (а A4988 не имеет выхода неисправности). Обратите внимание, что безопасно подключать вывод FAULT непосредственно к источнику питания логики (для его защиты имеется резистор 1,5 кОм между выходом IC и выводом), поэтому модуль DRV8825 можно использовать в системах, предназначенных для A49.88, которые направляют питание логики на этот контакт.
- Вывод SLEEP на DRV8825 по умолчанию не подтянут, как на A4988, но несущая плата подключает его к выводу FAULT через резистор 10k. Следовательно, системы, предназначенные для A4988, которые направляют питание логики на вывод FAULT, фактически будут иметь подтяжку 10 кОм на выводе SLEEP. (Этот резистор 10 кОм отсутствует в начальной (md20a) версии шасси DRV8825.)
- Потенциометр ограничения тока находится в другом месте.
- Связь между настройкой ограничения тока и напряжением опорного контакта отличается.
- DRV8825 предлагает микрошаговый шаг 1/32; A4988 опускается только до 1/16 шага.
- Входы на контакт выбора режима, соответствующие шагу 1/16 на A4988, приводят к микрошагу 1/32 на DRV8825. Для всех других разрешений микрошагов таблица выбора шага одинакова как для DRV8825, так и для A4988.
- Требования к синхронизации для минимальной длительности импульса на выводе STEP различаются для двух драйверов. Для DRV8825 высокий и низкий импульсы STEP должны быть не менее 1,9 каждый.нас; они могут быть всего 1 мкс при использовании A4988.
- DRV8825 имеет более высокое максимальное напряжение питания, чем A4988 (45 В против 35 В), что означает, что DRV8825 можно использовать более безопасно при более высоких напряжениях и он менее подвержен повреждениям от скачков напряжения LC.
- DRV8825 может отдавать больший ток, чем A4988, без какого-либо дополнительного охлаждения (на основе наших полношаговых тестов: 1,5 А на катушку для DRV8825 против 1,2 А на катушку для A4988 Black Edition и 1 А на катушку для оригинального A49).88 перевозчик).
- DRV8825 использует другое соглашение об именах для выходов шагового двигателя, но функционально они такие же, как и соответствующие контакты на плате A4988, поэтому одинаковые подключения к обоим драйверам приводят к одинаковому поведению шагового двигателя. На обеих платах первая часть этикетки идентифицирует катушку (таким образом, у вас есть катушки «A» и «B» на DRV8825 и катушки «1» и «2» на A4988).
- Для тех, кто работает с приложениями, чувствительными к цвету, обратите внимание, что носитель DRV8825 имеет фиолетовый цвет.
 Обратите внимание, что безопасно подключать вывод FAULT непосредственно к источнику питания логики (для его защиты имеется резистор 1,5 кОм между выходом IC и выводом), поэтому модуль DRV8825 можно использовать в системах, предназначенных для A49.88, которые направляют питание логики на этот контакт.
Обратите внимание, что безопасно подключать вывод FAULT непосредственно к источнику питания логики (для его защиты имеется резистор 1,5 кОм между выходом IC и выводом), поэтому модуль DRV8825 можно использовать в системах, предназначенных для A49.88, которые направляют питание логики на этот контакт. Для всех других разрешений микрошагов таблица выбора шага одинакова как для DRV8825, так и для A4988.
Для всех других разрешений микрошагов таблица выбора шага одинакова как для DRV8825, так и для A4988. На обеих платах первая часть этикетки идентифицирует катушку (таким образом, у вас есть катушки «A» и «B» на DRV8825 и катушки «1» и «2» на A4988).
На обеих платах первая часть этикетки идентифицирует катушку (таким образом, у вас есть катушки «A» и «B» на DRV8825 и катушки «1» и «2» на A4988).Таким образом, шасси DRV8825 достаточно похоже на наши шасси A4988, поэтому минимальная схема подключения для A4988 также является действительным альтернативным способом подключения DRV8825 к микроконтроллеру:
схема подключения микроконтроллера к плате драйвера шагового двигателя DRV8824/DRV8825 (полношаговый режим). |
|---|
Этот товар часто покупают вместе с:
| Шаговый двигатель: биполярный, 200 шагов/об, 42×38 мм, 2,8 В, 1,7 А/фаза |
A4988 Держатель драйвера шагового двигателя, Black Edition
A4988 Держатель драйвера шагового двигателя, Black Edition, вид снизу с размерами. |
|---|

Обзор
Этот продукт представляет собой плату-носитель или коммутационную плату для микрошагового драйвера Allegro A4988 DMOS с транслятором и защитой от перегрузки по току; поэтому мы рекомендуем внимательно прочитать A4988 (1MB pdf) перед использованием этого продукта. Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку (дополнительную информацию см. в разделе «Соображения рассеиваемой мощности » ниже). Вот некоторые из ключевых особенностей драйвера:
- Простой интерфейс управления шагом и направлением
- Пять различных шагов разрешения: полный шаг, полшага, четверть шага, восьмой шаг и шестнадцатый шаг
- Регулируемое управление током позволяет установить максимальный выходной ток с помощью потенциометра, что позволяет использовать напряжения выше номинального напряжения шагового двигателя для достижения более высокой частоты шагов
- Интеллектуальное управление прерыванием, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- Тепловое отключение при перегреве, блокировка при пониженном напряжении и защита от перегрузки по току
- Защита от короткого замыкания на землю и нагрузки
- 4-слойная медная печатная плата весом 2 унции для улучшенного рассеивания тепла
- Открытая площадка для пайки заземления под микросхемой драйвера в нижней части печатной платы
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая A49Микросхема драйвера 88 — установлена, как показано на картинке продукта.
Этот продукт поставляется в индивидуальной упаковке с 0,1-дюймовыми контактными штырьками, входящими в комплект, но не припаянными; у нас также есть версия с уже впаянными контактными штырями. Для клиентов, заинтересованных в больших объемах при более низкой удельной стоимости, мы предлагаем версию в упаковке без штырей и версию с установленными штырями.
Black Edition имеет ту же компоновку компонентов и распиновку, что и наш держатель драйвера шагового двигателя A4988, поэтому его можно использовать в качестве более производительной замены в приложениях, разработанных для наших оригинальных драйверов. Black Edition обеспечивает более высокую производительность благодаря четырехслойной печатной плате (PCB), которая лучше отводит тепло от A49.88 — в то время как наш оригинальный носитель может выдавать до 1 А на фазу в полношаговом режиме без радиатора или воздушного потока, Black Edition может выдавать примерно до 1,2 А при тех же условиях.
Обратите внимание, что у нас есть несколько других драйверов шаговых двигателей, которые можно использовать в качестве альтернативы этому модулю (и в качестве замены во многих приложениях): радиатора и доступен в двух версиях: одна с потенциометром для управления ограничением тока и одна с цифровым управлением ограничением тока для динамической регулировки ограничения тока с помощью микроконтроллера.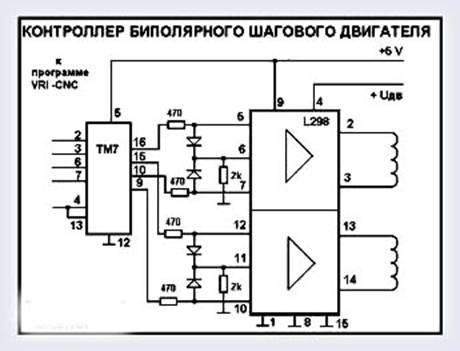
Мы также продаем более крупную версию шасси A4988 с защитой от обратного питания на входе основного питания и встроенными регуляторами напряжения 5 В и 3,3 В, что устраняет необходимость в отдельных источниках питания логики и двигателя.
Некоторыми униполярными шаговыми двигателями (например, с шестью или восемью выводами) этот драйвер может управлять как биполярными шаговыми двигателями. Для получения дополнительной информации см. часто задаваемые вопросы. Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Для получения дополнительной информации см. часто задаваемые вопросы. Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Аппаратное обеспечение в комплекте
Держатель драйвера шагового двигателя A4988 поставляется с одним 1×16-контактным отрывным разъемом 0,1 дюйма. Разъемы можно впаивать для использования с непаянными макетными платами или разъемами 0,1 дюйма. Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными разъемами).
Использование драйвера
Минимальная схема подключения микроконтроллера к шасси драйвера шагового двигателя A4988 (полношаговый режим). |
|---|
Силовые соединения
Драйверу требуется, чтобы напряжение питания логики (3–5,5 В) было подключено к контактам VDD и GND, а напряжение питания двигателя (8–35 В) должно быть подключено к контактам VMOT и GND. Эти источники питания должны иметь соответствующие развязывающие конденсаторы рядом с платой и должны обеспечивать ожидаемые токи (пики до 4 А для питания двигателя).
Эти источники питания должны иметь соответствующие развязывающие конденсаторы рядом с платой и должны обеспечивать ожидаемые токи (пики до 4 А для питания двигателя).
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к разрушительным скачкам напряжения LC, особенно при использовании проводов питания длиннее нескольких дюймов. При определенных условиях эти всплески могут превысить максимальное номинальное напряжение 35 В для A4988 и необратимо повредить плату, даже если напряжение питания двигателя составляет всего 12 В. Один из способов защитить драйвер от таких всплесков — поставить большой (не менее 47 мкФ) электролитический конденсатор по мощности двигателя (VMOT) и земле где-то рядом с платой.
Соединения двигателей
Четырех-, шести- и восьмипроводные шаговые двигатели могут управляться A4988, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может вывести его из строя. (В более общем случае переподключение чего-либо под напряжением вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигатели обычно имеют спецификацию размера шага (например, 1,8° или 200 шагов на оборот), которая относится к полным шагам. . Микрошаговый драйвер, такой как A4988 позволяет получить более высокое разрешение за счет размещения промежуточных ступеней, что достигается за счет питания катушек промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
Входы селектора разрешения (размера шага) (MS1, MS2 и MS3) позволяют выбрать один из пяти шагов разрешения в соответствии с таблицей ниже. MS1 и MS3 имеют внутренние подтягивающие резисторы на 100 кОм, а MS2 имеет внутренний подтягивающий резистор на 50 кОм, поэтому отключение этих трех контактов выбора микрошага приводит к полношаговому режиму.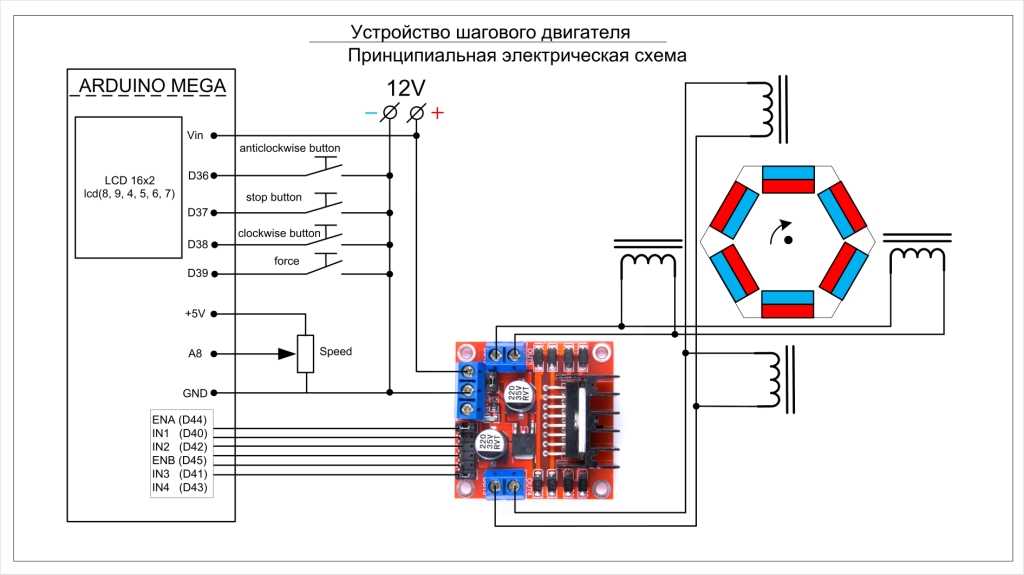 Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
| MS1 | МС2 | МС3 | Разрешение микрошага |
|---|---|---|---|
| Низкий | Низкий | Низкий | Полный шаг |
| Высокий | Низкий | Низкий | Полушаг |
| Низкий | Высокий | Низкий | Четверть шага |
| Высокий | Высокий | Низкий | Восьмой шаг |
| Высокий | Высокий | Высокий | Шестнадцатый шаг |
Входы управления
Каждый импульс на вход STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR. Обратите внимание, что выводы STEP и DIR не подключены к какому-либо определенному внутреннему напряжению, поэтому вы не должны оставлять ни один из этих выводов плавающим в своем приложении. Если вам просто нужно вращение в одном направлении, вы можете напрямую связать DIR с VCC или GND. Микросхема имеет три различных входа для управления многочисленными состояниями питания: RST, SLP и EN. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что контакт RST является плавающим; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы перевести его в высокий уровень и включить плату.
Ограничение тока
Одним из способов максимизировать производительность шагового двигателя является использование максимально возможного для вашего приложения напряжения. В частности, увеличение напряжения обычно позволяет увеличить скорость шага и вращающий момент шага, поскольку ток в катушках может изменяться быстрее после каждого шага. Однако, чтобы безопасно использовать напряжения выше номинального напряжения шагового двигателя, ток катушки должен активно ограничиваться, чтобы не допустить превышения номинального тока двигателя.
Однако, чтобы безопасно использовать напряжения выше номинального напряжения шагового двигателя, ток катушки должен активно ограничиваться, чтобы не допустить превышения номинального тока двигателя.
A4988 поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате можно использовать для установки ограничения тока. Одним из способов установки ограничения тока является перевод драйвера в полношаговый режим и измерение тока, протекающего через одну катушку двигателя, при регулировке потенциометра ограничения тока. Это должно быть сделано с двигателем, удерживающим фиксированное положение (т. е. без тактирования входа STEP). Обратите внимание, , что измеряемый ток составляет всего 70% от фактической настройки ограничения тока , так как обе катушки всегда включены и ограничены этим значением в полношаговом режиме, поэтому, если вы позже включите микрошаговые режимы, ток через катушки сможет превысить этот измеренный полношаговый ток на 40% (1/0,7 ) на определенных шагах; пожалуйста, примите это во внимание при использовании этого метода для установки ограничения тока. Также обратите внимание, что вам нужно будет выполнить эту регулировку снова, если вы когда-либо изменяли логическое напряжение, Vdd, так как опорное напряжение, которое устанавливает ограничение тока, является функцией Vdd.
Также обратите внимание, что вам нужно будет выполнить эту регулировку снова, если вы когда-либо изменяли логическое напряжение, Vdd, так как опорное напряжение, которое устанавливает ограничение тока, является функцией Vdd.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока. Подходящим местом для установки вашего амперметра является последовательное соединение с одной из катушек вашего шагового двигателя.
Другой способ установить ограничение тока — рассчитать опорное напряжение, соответствующее желаемому ограничению тока, а затем отрегулировать потенциометр ограничения тока до тех пор, пока не будет измерено это напряжение на
.0089 VREF пин. Напряжение на выводе VREF доступно через переходное отверстие, обведенное кружком в нижней части печатной платы. Ограничение тока, I MAX , относится к эталонному напряжению следующим образом:
«I_(MAX) = (V_(REF)) / (8 * R_(CS))«
или, переставленное для решения для VREF:
«V_(REF) = 8 * I_(MAX) * R_(CS)«
R CS сопротивление датчика тока; в оригинальных версиях этой платы использовались резисторы 0,050 Ом , но мы переключились на использование 0,068 Ом токоизмерительных резисторов в январе 2017 года, что делает более полезным диапазон регулировки потенциометра. На следующем рисунке показано, как определить, какие токоизмерительные резисторы установлены на вашей плате:
На следующем рисунке показано, как определить, какие токоизмерительные резисторы установлены на вашей плате:
Идентификация оригинальных измерительных резисторов 50 мОм (слева) и 68 мОм (справа), представленных в январе 2017 г. |
|---|
Так, например, если вы хотите установить ограничение тока на 1 А и у вас есть плата с резисторами 68 мОм, вы должны установить VREF на 540 мВ. Это гарантирует, что, даже если ток через каждую катушку меняется от шага к шагу, величина вектора тока в шаговом двигателе остается постоянной на уровне 1 А: 92) = I_(MAX) = 1 text (A)«
Если вместо этого вы хотите, чтобы ток через для каждой катушки составлял 1 А в полношаговом режиме, вам нужно установить ограничение тока на 40 %. выше, или 1,4 А, поскольку катушки ограничены примерно 70 % от установленного предельного тока в полношаговом режиме (приведенное выше уравнение показывает, почему это так). Чтобы сделать это с платой с чувствительными резисторами 68 мОм, вы должны установить VREF на 770 мВ.
Соображения по рассеиваемой мощности
ИС драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, но фактический ток, который вы можете обеспечить, зависит от того, насколько хорошо вы можете поддерживать охлаждение ИС. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более приблизительно 1,2 А на катушку требуется радиатор или другой метод охлаждения (в наших тестах мы смогли обеспечить примерно 1,4 А на катушку). с потоком воздуха от вентилятора ПК и без радиатора).
Этот продукт может нагреть до такой степени, что обожжет вас задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания).