Содержание
Управление бесколлекторным двигателем
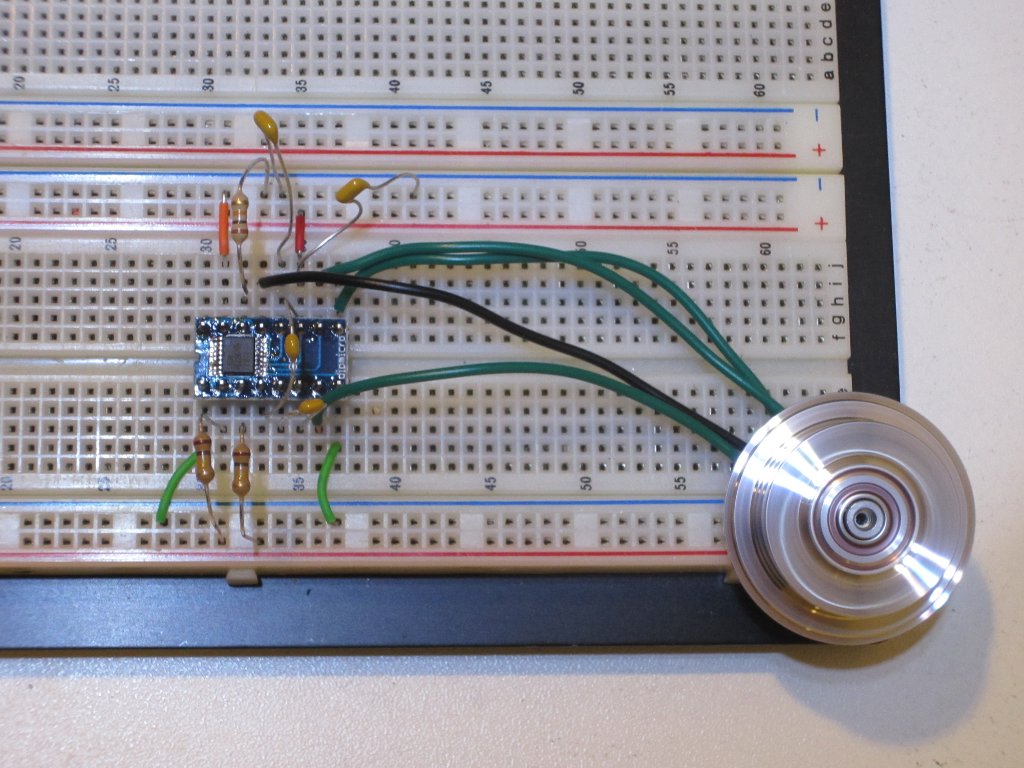
Основная задача блока управления бесколлекторным двигателем — переключать обмотки статора в зависимости от положения ротора. Вот первый пример реализации инвертора — авиамодельный , самый дешевый. Фото с двух сторон. На одной стороне видно 6 транзисторов в корпусах SOIC. Ещё есть электролитический конденсатор и всякая мелочь — резисторы с конденсаторами.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Бесколлекторный двигатель
- Бесколлекторный двигатель – устройство, принцип работы и управление
- Управление бесколлекторным двигателем с датчиками Холла (Sensored brushless motors)
- Управление бесколлекторным двигателем постоянного тока
- Блоки управления бесколлекторными двигателями
- Вы точно человек?
- Что такое бесколлекторный двигатель постоянного тока и его принцип работы
- Бесколлекторный электродвигатель принцип работы
- Одна микросхема — один двигатель.
STSPIN32F0 — готовое решение для управления BLDC-моторами
 STSPIN32F0 — готовое решение для управления BLDC-моторами
STSPIN32F0 — готовое решение для управления BLDC-моторамиПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Уроки Arduino — управление бесколлекторным мотором
Бесколлекторный двигатель
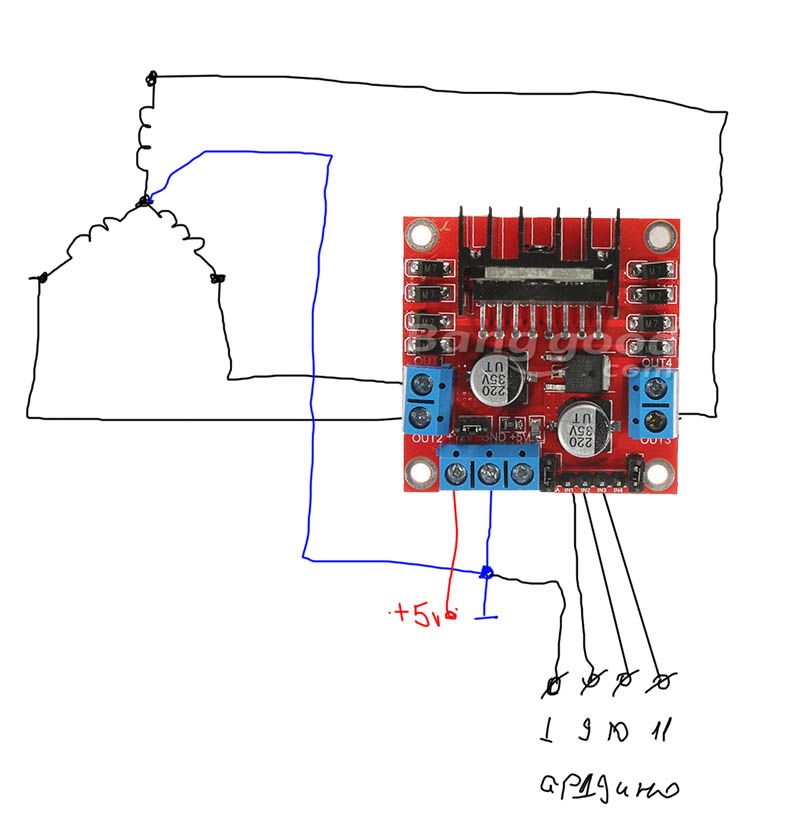
Запросить склады. Перейти к новому. Управление бесколлекторным двигателем. Хочу сделать драйвер управления бесколлекторным двигателем, конкретно для двигателя от HDD. Имеется четыре вывода, насколько я понял это схема соединения звездой, 3 фазы и общий провод, управляется с помощью ЭДС обратной связи с обмоток. Re: упраление бесколлекторным двигателем. ХЗ какой у вас двигатель. Но, может начать с электротехники и определится с двигателем?
Меню пользователя Vetal-soft Посмотреть профиль Отправить личное сообщение для Vetal-soft Найти ещё сообщения от Vetal-soft. Такой вывод имеется исходя из «гугления» по используемым двигателям в HDD и измерения сопротивлений между выводами двигателя.
Такой вывод имеется исходя из «гугления» по используемым двигателям в HDD и измерения сопротивлений между выводами двигателя.
Последний раз редактировалось CR8; Re: Управление бесколлекторным двигателем. Просто в hdd еще и биполярники используються, тоже 4 вывода. Посмотри в какую микросхему идут провода от двигателя, и уже по даташиту на микросхему будешь знать какой у тебя двигатель. У тебя что все выводы одинаково звонятся относительного одного провода?
Теперь на www. Меню пользователя avrnm-ru Посмотреть профиль Отправить личное сообщение для avrnm-ru Посетить домашнюю страницу avrnm-ru Найти ещё сообщения от avrnm-ru. Разные есть схемы контроля back emf. В апнотах Майкрочипа из трех проводков суммируются резисторами и через компараторы заводится, а в документе BLDC fundamentals от того же Майрочипа упоминается и вариант с выводом средней точки четвертый провод.
Его можно и не использовать. Меню пользователя sim Посмотреть профиль Отправить личное сообщение для sim Найти ещё сообщения от sim Обсуждение сайта и форума.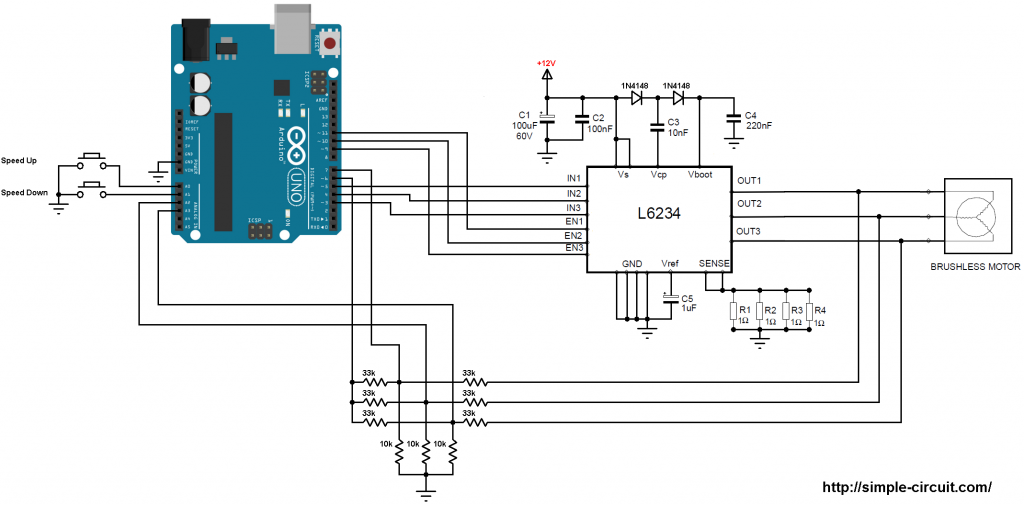 RU — Архив — Вверх. Перевод: zCarot. Реклама на сайте. Поиск PDF.
RU — Архив — Вверх. Перевод: zCarot. Реклама на сайте. Поиск PDF.
От производителей Новости поставщиков В мире электроники. Сборник статей Электронные книги FAQ по электронике. Каталог схем Избранные схемы FAQ по электронике. Программы Каталог сайтов Производители электроники. Форумы по электронике Удаленная работа Помощь проекту. Все разделы прочитаны.
Микроконтроллеры, АЦП, память и т. Страница 1 из 4. Опции темы. Управление бесколлекторным двигателем Хочу сделать драйвер управления бесколлекторным двигателем, конкретно для двигателя от HDD. Отправить личное сообщение для CR8. Найти ещё сообщения от CR8. Re: упраление бесколлекторным двигателем ХЗ какой у вас двигатель. Отправить личное сообщение для Vetal-soft. Найти ещё сообщения от Vetal-soft. Re: упраление бесколлекторным двигателем я думаю это самая понятная часть, бесколлекторный трехфазный двигатель, со схемой соединения звездой.
Re: Управление бесколлекторным двигателем Просто в hdd еще и биполярники используються, тоже 4 вывода. Re: Управление бесколлекторным двигателем Теперь на www. Отправить личное сообщение для avrnm-ru. Посетить домашнюю страницу avrnm-ru. Найти ещё сообщения от avrnm-ru.
Re: Управление бесколлекторным двигателем Теперь на www. Отправить личное сообщение для avrnm-ru. Посетить домашнюю страницу avrnm-ru. Найти ещё сообщения от avrnm-ru.
Сообщение от avrnm-ru. Re: Управление бесколлекторным двигателем Разные есть схемы контроля back emf. Отправить личное сообщение для Eddy Найти ещё сообщения от Eddy Сообщение от Eddy Сообщение от CR8. Эти 6 пользователя ей сказали Спасибо sim за это сообщение:. Отправить личное сообщение для sim Найти ещё сообщения от sim Сообщение от sim Вот ссылка на статью по этой теме. В свое время реализовал один из алгоритмов с нуля на Atmega16, работает как часы.
Digg del. Ваши права в разделе. Вы не можете создавать новые темы Вы не можете отвечать в темах Вы не можете прикреплять вложения Вы не можете редактировать свои сообщения BB коды Вкл.
Смайлы Вкл. HTML код Выкл. Правила форума. Похожие темы. Управление асинхронным двигателем. Управление вентильным двигателем MC
Бесколлекторный двигатель – устройство, принцип работы и управление
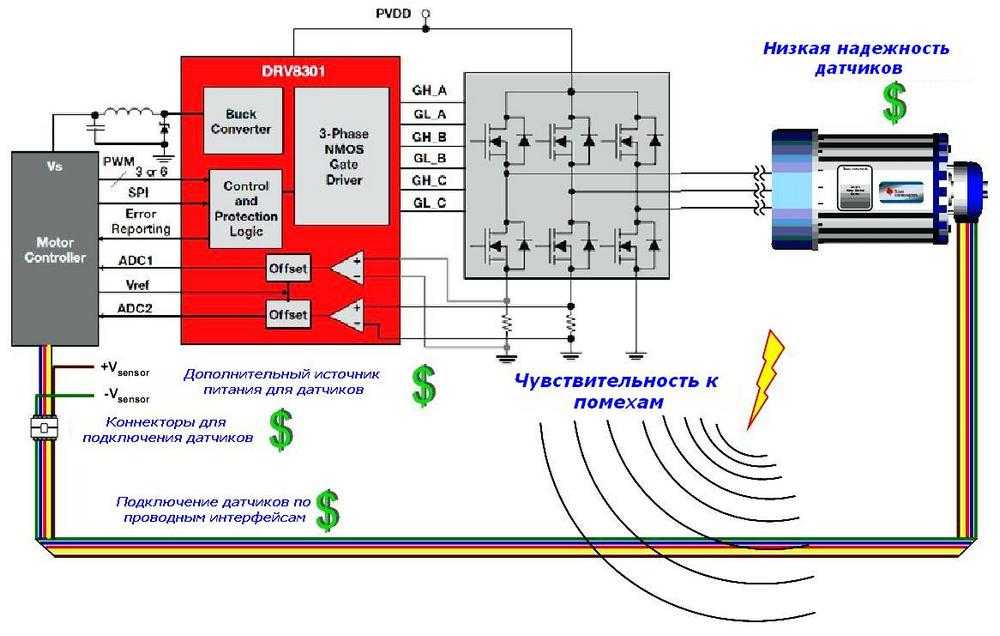
Больше не показывать Зарегистрироваться. Новые MCP позволяют управлять сразу шестью N-канальными ключами, что значительно увеличивает эффективность и сокращает себестоимость приложения. MCP работает в широком диапазоне напряжений питания: от 6В до 28В и способна выдерживать кратковременные импульсы до 48В. В состав высокоинтегрированной аналоговой периферии микросхемы входят: три операционных усилителя для контроля тока, компаратор токовой защиты, MOSFET драйверы и двусторонний интерфейс для построения полноценной системы управления двигателем. Возможность конфигурирования таких параметров драйвера как мертвое время, время гашения и ограничение верхнего предела тока внешних ключей, значительно увеличивает гибкость системы.
Новые MCP позволяют управлять сразу шестью N-канальными ключами, что значительно увеличивает эффективность и сокращает себестоимость приложения. MCP работает в широком диапазоне напряжений питания: от 6В до 28В и способна выдерживать кратковременные импульсы до 48В. В состав высокоинтегрированной аналоговой периферии микросхемы входят: три операционных усилителя для контроля тока, компаратор токовой защиты, MOSFET драйверы и двусторонний интерфейс для построения полноценной системы управления двигателем. Возможность конфигурирования таких параметров драйвера как мертвое время, время гашения и ограничение верхнего предела тока внешних ключей, значительно увеличивает гибкость системы.
Управление бесколлекторным двигателем постоянного тока Как известно в коллекторных двигателях постоянного тока коммутация.
Управление бесколлекторным двигателем с датчиками Холла (Sensored brushless motors)
Мы уже ознакомились с устройством бесколлекторного двигателя и теперь разберемся, как ним управлять. Для обеспечения обратного направления, открываем SW5 и SW2. При работе двигателя одновременно должен быть открыт только один верхний ключ и один нижний ключ. При смене состояния нужно сразу выключить пару ключей, выждать время, необходимое для закрытия ключей, и только после этого включить другую пару ключей. Напряжение на обмотки нужно подавать в зависимости от положения двигателя. Рассмотрим управление двигателем, где в качестве датчиков положения используются датчики Холла. Всего используют 3 датчика с дискретными выходами.
Для обеспечения обратного направления, открываем SW5 и SW2. При работе двигателя одновременно должен быть открыт только один верхний ключ и один нижний ключ. При смене состояния нужно сразу выключить пару ключей, выждать время, необходимое для закрытия ключей, и только после этого включить другую пару ключей. Напряжение на обмотки нужно подавать в зависимости от положения двигателя. Рассмотрим управление двигателем, где в качестве датчиков положения используются датчики Холла. Всего используют 3 датчика с дискретными выходами.
Управление бесколлекторным двигателем постоянного тока
Войти через. На AliExpress мы предлагаем тысячи разновидностей продукции всех брендов и спецификаций, на любой вкус и размер. Если вы хотите купить Arduino бесколлекторным motor control и подобные товары, мы предлагаем вам 3, позиций на выбор, среди которых вы обязательно найдете варианты на свой вкус. Кроме того, если вы ищите Arduino бесколлекторным motor control, мы также порекомендуем вам похожие товары, например stm32 управление шаговым двигателем , управление шаговым двигателем arduino , arduino управление мотором , управление шаговым двигателем a , управление бесколлекторным двигателем stm32 , управление шаговым двигателем stm32 , arduino управление шаговым двигателем , управление мотором arduino , управление оборотами кулером arduino.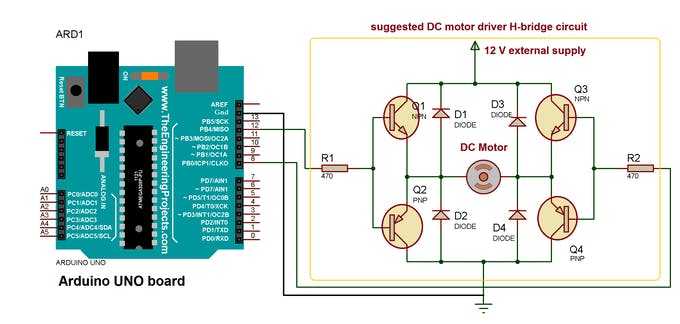
Бесколлекторные двигатели применяются в самых разных областях, так как это надежные, долговечные и стойкие к поломкам агрегаты. В быту чаще всего используется двигатель постоянного тока на 12 вольт, но бывают модели с большей мощностью.
Блоки управления бесколлекторными двигателями
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией ШИМ. Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока БДПТ , который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений.
Вы точно человек?
Двигатели в мультироторных аппаратах бывают двух типов: коллекторные и бесколлекторные.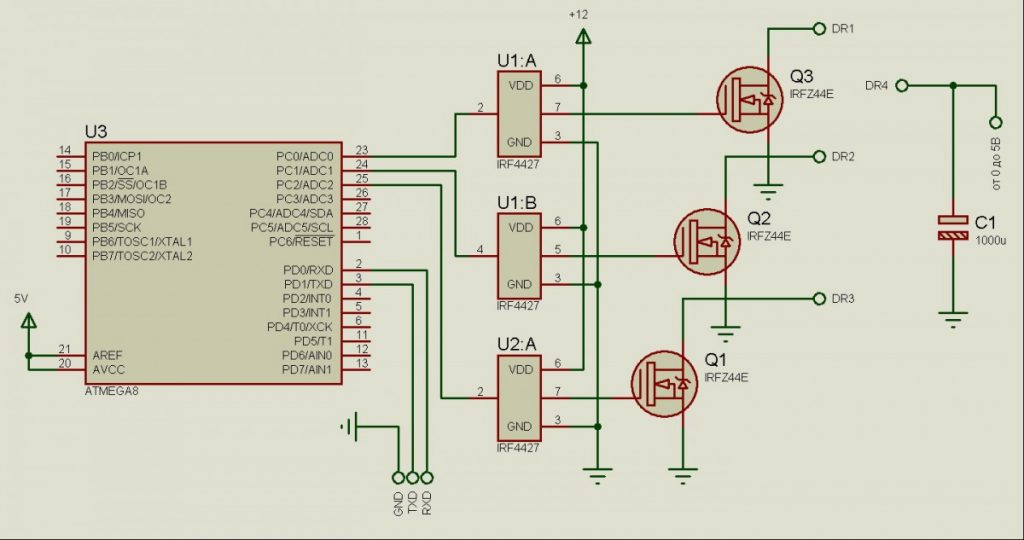 Их главное отличие в том, что у коллекторного двигателя обмотки находятся на роторе вращающейся части , а у бесколлекторного — на статоре. Не вдаваясь в подробности скажем, что бесколлекторный двигатель предпочтительнее коллекторного поскольку наиболее удовлетворяет требованиям, ставящимся перед ним. Поэтому в этой статье речь пойдёт именно о таком типе моторов. Подробно о разнице между бесколлекторными и коллекторными двигателями можно прочесть в.
Их главное отличие в том, что у коллекторного двигателя обмотки находятся на роторе вращающейся части , а у бесколлекторного — на статоре. Не вдаваясь в подробности скажем, что бесколлекторный двигатель предпочтительнее коллекторного поскольку наиболее удовлетворяет требованиям, ставящимся перед ним. Поэтому в этой статье речь пойдёт именно о таком типе моторов. Подробно о разнице между бесколлекторными и коллекторными двигателями можно прочесть в.
Тема работы: “Устройство управления бесколлекторным двигателем посто- типовые схемы управления бесколлекторными двигателями постоянно-.
Что такое бесколлекторный двигатель постоянного тока и его принцип работы
Тема в разделе » Моторы, сервоприводы, робототехника «, создана пользователем Azret , 7 июл Войти или зарегистрироваться. Искать только в заголовках Сообщения пользователя: Имена участников разделяйте запятой.
Бесколлекторный электродвигатель принцип работы
Столкнулся со следующей проблемой. Собираю машину на дистанционном управлении и решил сначала испытать бесколлекторный двигатель пока без модуля wi-fi при управлении с помощью потенциометра.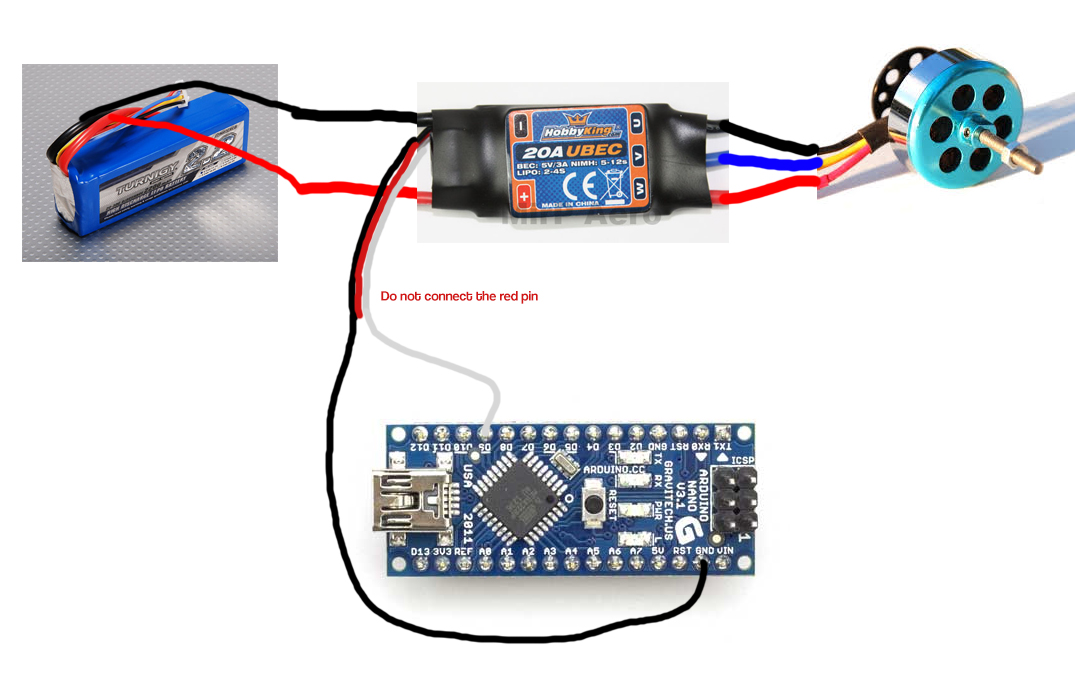 Собрал схему, написал прошивку, но программа выдает ошибку. Использую ардуино NANO. Скетч следующий:.
Собрал схему, написал прошивку, но программа выдает ошибку. Использую ардуино NANO. Скетч следующий:.
Запросить склады.
Одна микросхема — один двигатель. STSPIN32F0 — готовое решение для управления BLDC-моторами
Преимущества бесколлекторных двигателей по сравнению с бензиновыми двигателями. Бесколлекторный двигатель также имеет и другие названия вентильный электродвигатель или шпиндельный электродвигатель. Данный тип двигателей был создан с целью улучшения свойств коллекторных электродвигателей постоянного тока. Бесколлекторный двигатель объединяет в себе лучшие качества безконтактных двигателей и двигателей постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками.
Re: пассики для проигрывателей винила Re: Динамическая индикация на LCD дисплее Re: Пассик на пленочный магнитофон
Блоки управления для бесколлекторных двигателей постоянного тока BLSD с датчиками Холла
Блоки управления бесколлекторными двигателями постоянного тока BLSD
Блоки управления бесколлекторными двигателями постоянного тока BLSD
| Напряжение, В | 24. ..48 ..48 |
|---|---|
Номинальный ток, А
|
|
| Собственный ток потребления, мА | 80 |
| Коммуникационный интерфейс | RS-485 |
Скачать паспорт
Скачать описание
Скачать программу
Заказать
Описание блоков управления бесколлекторным двигателем постоянного тока
BLSD
Блок управления BLSD предназначен для управления трёхфазными бесколлекторными двигателями постоянного
тока с датчиками
Холла. Управление блоком может осуществляться в ручном режиме и в режиме управления по шине RS-485. Блок
Управление блоком может осуществляться в ручном режиме и в режиме управления по шине RS-485. Блок
позволяет
управлять скоростью, ускорением, торможением и направлением движения двигателя.
Условия эксплуатации блока:
- температура окружающего воздуха – (0…+50)ºС
- относительная влажность воздуха до 90%
- атмосферное давление (650…800)мм. рт. ст.
Управление скоростью:
- аналоговый вход
- напряжение: 0 — 5В
- сопротивление: 5 кОм
- встроенным потенциометром
Управление направлением:
- Направление вращения в момент запуска зависит от положения переключателя «Reverse». В ходе работы
направление
вращения меняется сигналом «Reverse» — типа сухой контакт. - Для управления ускорением и торможением двигателя предназначен потенциометр «ACCEL». Для резкого
торможения
предназначена кнопка «BRAKE».
 В ходе работы
В ходе работыКонтроллеры серии BLSD.
Управление бесколлекторным двигателем.
Схема подключения и управляющие сигналы
Габаритные размеры контроллеров управления бесколлекторным двигателем серии BLSD
Контроллер BLSD-20Контроллер BLSD-50
Подключение двигателей FL42BLS и FL57BL(S) к блоку управления BLSD‑20
Подключение двигателей FL86BLS к блоку управления BLSD‑50
Подключение двигателей IG-80WGM и IG-90WGM к блоку управления BLSD-20
Связаться с нами
Хотите узнать дополнительную информацию о продукции — задайте вопрос.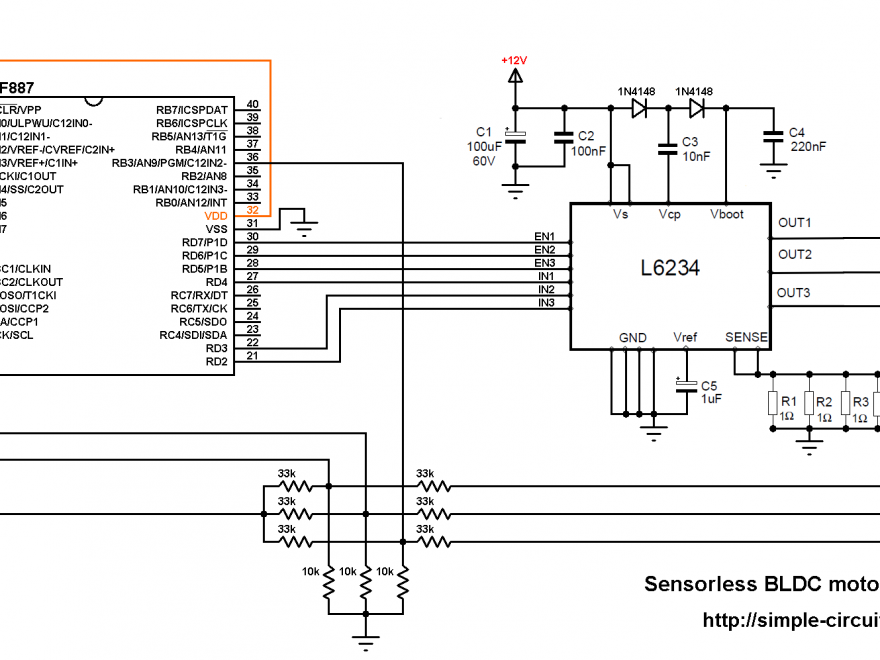 Наш специалист свяжется с вами в ближайшее время.
Наш специалист свяжется с вами в ближайшее время.
Управление бесколлекторным двигателем с помощью Arduino • AranaCorp
Теги: Arduino, Бесколлекторный двигатель, C/C++, Программирование
4.2
(11)
Одной из основных задач робототехники является артикулирование объектов. Для этого очень распространено использование электродвигателей. В случае с летающими роботами, такими как дроны, приводы нуждаются в высокой скорости вращения, чтобы пропеллеры вращались и позволяли летать. В этом случае часто используются бесколлекторные двигатели. Особенность бесщеточного (бесколлекторного) двигателя в том, что он может достигать очень высоких скоростей по сравнению с другими типами двигателей с меньшим крутящим моментом, разумеется.
Оборудование
- Компьютер
- Arduino UNO
- USB-кабель Штекер A к штекеру B
- Бесколлекторный+ESC
Принцип работы
Бесколлекторные двигатели называются трехфазными двигателями с тремя обмотками.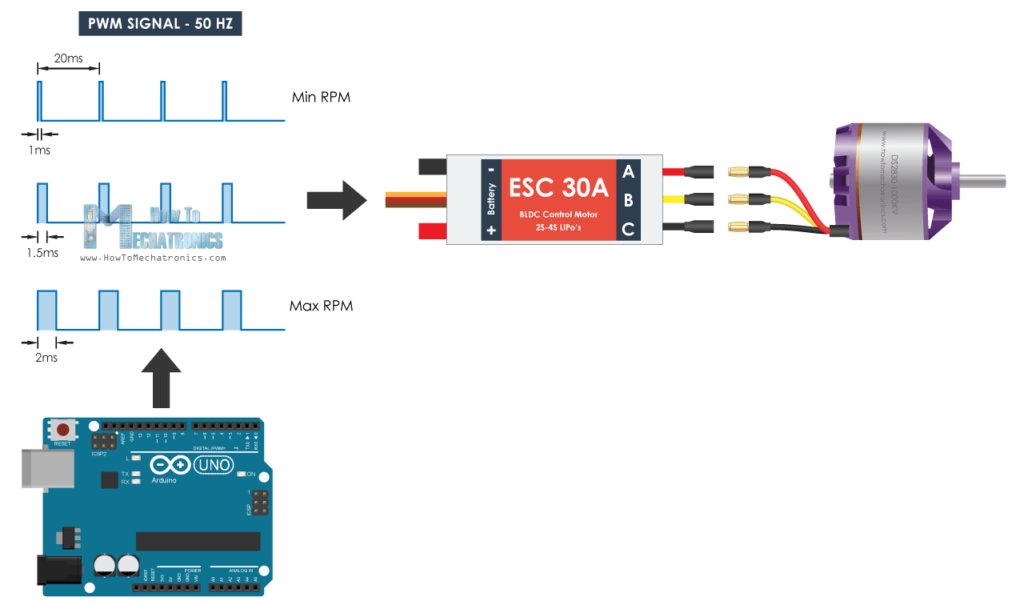 Это означает, что он генерирует непрерывное вращение, когда токи на этих обмотках смещаются. Генерация профилей тока на каждой катушке для получения желаемой скорости требует использования регулятора скорости (называемого ESC, электронный регулятор скорости) для преобразования команды ШИМ в скорость вращения.
Это означает, что он генерирует непрерывное вращение, когда токи на этих обмотках смещаются. Генерация профилей тока на каждой катушке для получения желаемой скорости требует использования регулятора скорости (называемого ESC, электронный регулятор скорости) для преобразования команды ШИМ в скорость вращения.
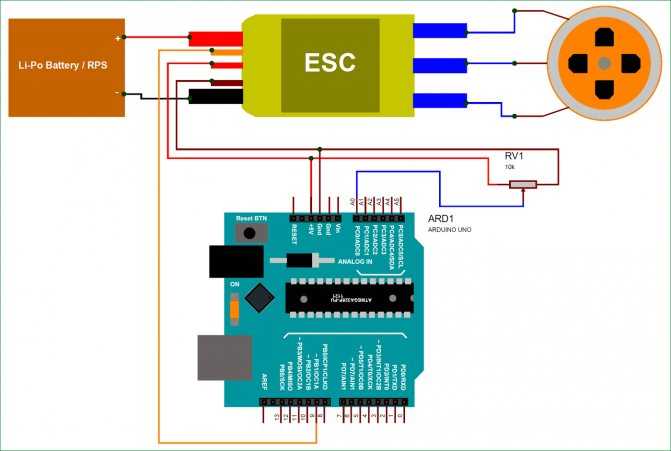
Схема
Для правильной работы двигателя требуется большой ток, поэтому ESC будет питаться от источника питания, внешнего по отношению к микроконтроллеру. Регулятор ESC подключается к разъему ШИМ на микроконтроллере.
Код
Каждый раз, когда код запускается, ESC должен следовать определенной процедуре для правильной инициализации. Эта процедура описана в функции initProcedure() и состоит из последовательности ШИМ-команд в течение определенного времени (соответствующего сигналам от пультов радиоуправления).
//Параметры
const int escPin = 3;
интервал мин_дроссель = 1000;
интервал max_throttle = 2000;
unsigned long currentMillis, previousMillis;
недействительная установка () {
//Инициализация последовательного USB
Серийный номер . begin(9600);
Серийный номер .println(F("Инициализировать систему"));
//Инициализируем ESC
pinMode(escPin, ВЫХОД);
процедура инициализации();
}
недействительный цикл () {
запустить бесщеточный();
}
void runBrushless() { /* функция runBrushless */
//// Проверка бесколлекторной процедуры
Серийный номер .println("работает");
текущий Миллис = 0;
предыдущийMillis = миллис();
в то время как (currentMillis < 2000) {
текущая миллис = миллис () - предыдущая миллис;
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды(1350);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
}
Серийный номер .println("стоп");
текущий Миллис = 0;
предыдущийMillis = миллис();
в то время как (currentMillis < 2000) {
текущая миллис = миллис () - предыдущая миллис;
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды (min_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
}
}
void initProcedure() { /* функция initProcedure */
//// Процесс инициализации ESC
предыдущийMillis = миллис();
Серийный номер . println("Дроссель вверх");
в то время как (currentMillis < 3000) {
текущая миллис = миллис () - предыдущая миллис;
Серийный номер .println(currentMillis);
digitalWrite(escPin, ВЫСОКИЙ);
задержка в микросекундах (max_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
} //бип-бип-
текущий Миллис = 0;
предыдущийMillis = миллис();
Серийный номер .println("уменьшить дроссельную заслонку");
в то время как (currentMillis < 4500) {
текущая миллис = миллис () - предыдущая миллис;
Серийный номер .println(currentMillis);
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды (min_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
} // звуковой сигнал--
// 1 2 3
}
 begin(9600);
Серийный номер .println(F("Инициализировать систему"));
//Инициализируем ESC
pinMode(escPin, ВЫХОД);
процедура инициализации();
}
недействительный цикл () {
запустить бесщеточный();
}
void runBrushless() { /* функция runBrushless */
//// Проверка бесколлекторной процедуры
Серийный номер .println("работает");
текущий Миллис = 0;
предыдущийMillis = миллис();
в то время как (currentMillis < 2000) {
текущая миллис = миллис () - предыдущая миллис;
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды(1350);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
}
Серийный номер .println("стоп");
текущий Миллис = 0;
предыдущийMillis = миллис();
в то время как (currentMillis < 2000) {
текущая миллис = миллис () - предыдущая миллис;
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды (min_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
}
}
void initProcedure() { /* функция initProcedure */
//// Процесс инициализации ESC
предыдущийMillis = миллис();
Серийный номер .
begin(9600);
Серийный номер .println(F("Инициализировать систему"));
//Инициализируем ESC
pinMode(escPin, ВЫХОД);
процедура инициализации();
}
недействительный цикл () {
запустить бесщеточный();
}
void runBrushless() { /* функция runBrushless */
//// Проверка бесколлекторной процедуры
Серийный номер .println("работает");
текущий Миллис = 0;
предыдущийMillis = миллис();
в то время как (currentMillis < 2000) {
текущая миллис = миллис () - предыдущая миллис;
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды(1350);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
}
Серийный номер .println("стоп");
текущий Миллис = 0;
предыдущийMillis = миллис();
в то время как (currentMillis < 2000) {
текущая миллис = миллис () - предыдущая миллис;
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды (min_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
}
}
void initProcedure() { /* функция initProcedure */
//// Процесс инициализации ESC
предыдущийMillis = миллис();
Серийный номер . println("Дроссель вверх");
в то время как (currentMillis < 3000) {
текущая миллис = миллис () - предыдущая миллис;
Серийный номер .println(currentMillis);
digitalWrite(escPin, ВЫСОКИЙ);
задержка в микросекундах (max_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
} //бип-бип-
текущий Миллис = 0;
предыдущийMillis = миллис();
Серийный номер .println("уменьшить дроссельную заслонку");
в то время как (currentMillis < 4500) {
текущая миллис = миллис () - предыдущая миллис;
Серийный номер .println(currentMillis);
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды (min_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
} // звуковой сигнал--
// 1 2 3
}
println("Дроссель вверх");
в то время как (currentMillis < 3000) {
текущая миллис = миллис () - предыдущая миллис;
Серийный номер .println(currentMillis);
digitalWrite(escPin, ВЫСОКИЙ);
задержка в микросекундах (max_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
} //бип-бип-
текущий Миллис = 0;
предыдущийMillis = миллис();
Серийный номер .println("уменьшить дроссельную заслонку");
в то время как (currentMillis < 4500) {
текущая миллис = миллис () - предыдущая миллис;
Серийный номер .println(currentMillis);
digitalWrite(escPin, ВЫСОКИЙ);
задержкаМикросекунды (min_throttle);
digitalWrite(escPin, НИЗКИЙ);
задержка(20);
} // звуковой сигнал--
// 1 2 3
}
Результат
Когда вы включаете карту Arduino и запускаете код, вы должны услышать, как ESC издает звуки, информирующие вас о ходе инициализации (два коротких и один длинный сигнал). После этого вы должны увидеть работающий двигатель.
Приложения
- Сборка дрона
- Приведение в движение лодки с дистанционным управлением
Найдите другие примеры и руководства в нашем Автоматическом генераторе кодов
Code Architect
Насколько полезен был этот пост?
Нажмите на звездочку, чтобы оценить!
Средняя оценка 4.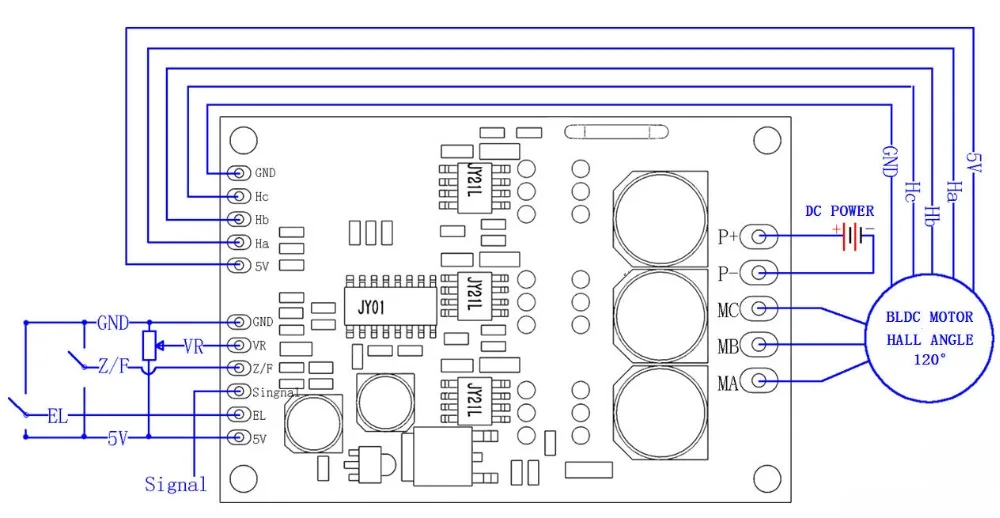 2 / 5. Всего голосов: 11
2 / 5. Всего голосов: 11
Голосов пока нет! Будьте первым, кто оценит этот пост.
Сожалеем, что этот пост не был вам полезен!
Давайте улучшим этот пост!
Расскажите, как мы можем улучшить этот пост?
Драйверы
BLDC | Arduino-FOC
Эта библиотека будет совместима с большинством драйверов 3-фазных двигателей BLDC. например L6234, DRV8305, DRV8313 или даже L293.
В настоящее время найти недорогую плату драйвера BLDC все еще достаточно сложно, что делает наш выбор оборудования весьма ограниченным. Это одна из причин для разработки SimpleFOCShield, универсального и простого драйвера BLDC. К счастью, сообщество начинает набирать обороты в этом направлении, и, вероятно, это вопрос времени, когда двигатели BLDC станут стандартом и в сообществе любителей, что действительно интересно! 😃
Выбор типа драйвера BLDC, который вам понадобится в вашем проекте, напрямую зависит от используемого вами двигателя BLDC. Поэтому мы можем разделить их на две группы:
- Драйверы BLDC малой мощности — Моторы карданного подвеса (R>10 Ом)
- Драйверы BLDC высокой производительности — Мощные двигатели BLDC постоянного тока (R<1 Ом)
Малая мощность платы (карданные двигатели)
Вот некоторые платы драйверов BLDC, которые предназначены для карданных двигателей и работают с библиотекой готовый . Карданные двигатели обычно имеют более 10 пар полюсов и внутреннее сопротивление > 10 Ом. Они предназначены для очень плавной работы на низких скоростях. Карданные двигатели очень универсальны и идеально подходят для качественной замены шаговых двигателей и серводвигателей постоянного тока.
Карданные двигатели обычно имеют более 10 пар полюсов и внутреннее сопротивление > 10 Ом. Они предназначены для очень плавной работы на низких скоростях. Карданные двигатели очень универсальны и идеально подходят для качественной замены шаговых двигателей и серводвигателей постоянного тока.
| Примеры | Описание | Спецификации | Ссылка | Цена | |||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ardin0129 | — L6234 chip — 8-24V — up to 5 Amps — 1 motor — Arduino Shield — Encoder+I2C Pullups | More info | 15€ | ||||||||||||||||||||||||||||||||||
| Arduino SimpleFOCShield v2 | — Чип L6234 — 8-24 В — до 5 ампер — 1 двигатель — Плата Arduino Shield — Энкодер + I2C Pullups — Линейный датчик тока — Встроенный регулятор напряжения | Магазин SimpleFOC Aliexpress Ebay | ~20€ | ||||||||||||||||||||||||||||||||||
| SimpleFOCMini v1 | — DRV8313 chip — 8-30V — up to 2. 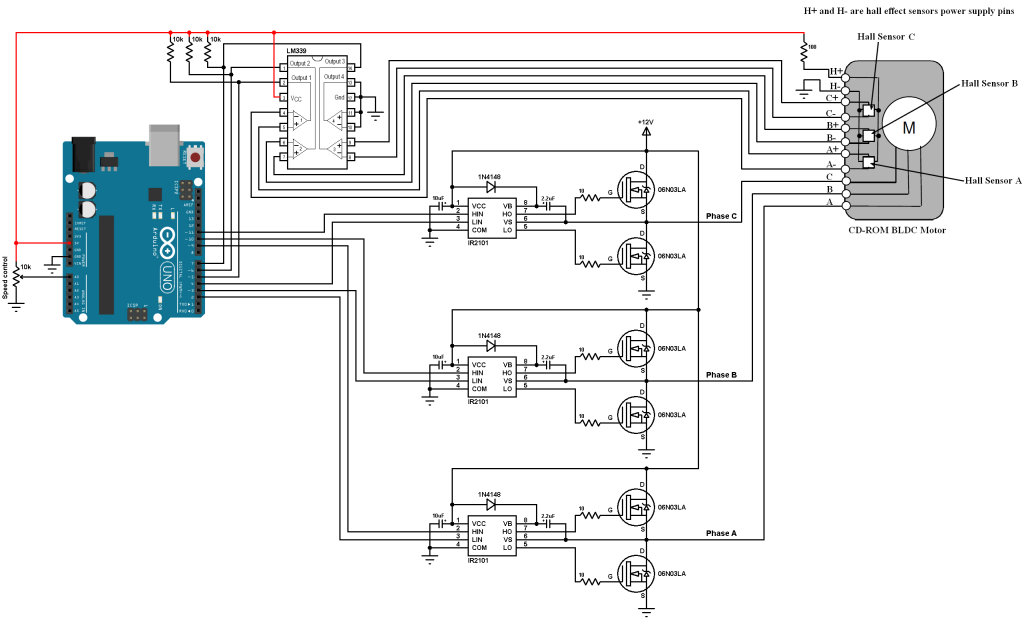 5 Amps 5 Amps — 3.3V LDO onboard — 1 motor — 21x26mm | SimpleFOC store (comming soon) | 5-7€ | ||||||||||||||||||||||||||||||||||
| Drotek L6234 breakout board | — L6234 chip — 1 motor — 25x25mm | Drotek Ebay | 30€ | ||||||||||||||||||||||||||||||||||
| Deng FOC Controler Плата прорыва | — L6234 Чип — 8-24 В — до 5 А. найдите платы контроллера подвеса со встроенными драйверами BLDC и чипами микроконтроллера.
Finally one of the cheapest possible solutions for running a gimbal BLDC motor is to use one of the Драйверы двигателей с двумя двигателями постоянного тока, такие как:
9 |
 1
19
9
129
129
228 9000.
Высокопроизводительные платы
Библиотека SimpleFOClibrary поддерживает практически любой драйвер двигателя BLDC, которым можно управлять с помощью 3-х или 6-ти сигналов ШИМ. До этого момента (версия 1.3.1) в библиотеке не реализован текущий контур управления. Крутящий момент двигателя управляется напряжением напрямую (подробнее)
Вот протестированные платы, совместимые с библиотекой:
Примеры Описание Технические характеристики Link Price DRV8302 driver — DRV8302 chip
— 1 motor
— 45V/27A
— BEMF/current sensing
— fault protectionAliexpress 30€ Драйвер DRV8301 — Чип DRV8301
— 1 двигатель
— 45V/27A
— BEMF/датчик тока
— защита от сбоев
— конфигурация SPIAliexpress 4 € 901 2 B-G431B-ESC1 — Микросхема STM32G431CB
— Встроенная ST-LINK/V2-1
— 1 двигатель
— 30 В/40 А
— Датчик тока на стороне низкого напряжения STM Webiste
Mouser16 € Infineon
BLDC -SHIELD_IFX007T SHIED— IFX007T Половина CHIELD
— 10066 —— IFX007T Half -Bridges
— 10066 —— IFX007T Half -Bridges
— 10066 —— IFX007T Half -Bridges
— 10066 — 40 -necurity.Инфинеон 40 € @bydagor
Dagor без прощеивания контроллер.
alpha batch sold out40€ Arduino
SimpleFOCPowerShield— BTN8982 half-bridges
— 1 motor
— 40V/30A
— fault protection
Выпуск v1:
— Встроенный ток. Драйверы
— 1 двигатель
— 36В/20А
— измерение тока на стороне низкого напряженияAliexpress Ebay 30€0066 — 12-48V
— 60a (120a пик)
— Ощущение тока с низким содержаниемAliexpress
Sodive Shop70-100 €
200 €229.9038
.
901TS00789.001TS001TS0078
9000.001TS0078
.901TS00789 основаны на относительно старой транзисторной технологии и имеют относительно большое время нарастания транзистора, что может привести к неравномерной работе. Мы предлагаем использовать платы на этих микросхемах только в режиме замкнутого контура, так как датчик положения может корректировать возможный шум от драйвера.
 время нарастания транзистора, которое может привести к негладкой работе. Мы предлагаем платы на базе L298N только в режиме замкнутого контура, так как датчик положения может корректировать возможный шум от драйвера. Это также может быть хорошей платой для начинающих пользователей, чтобы ознакомиться с FOC как с дешевым решением, но с определенными ограничениями производительности.
время нарастания транзистора, которое может привести к негладкой работе. Мы предлагаем платы на базе L298N только в режиме замкнутого контура, так как датчик положения может корректировать возможный шум от драйвера. Это также может быть хорошей платой для начинающих пользователей, чтобы ознакомиться с FOC как с дешевым решением, но с определенными ограничениями производительности.