Содержание
Скалярное управление
Дмитрий Левкин
Отношение В/Гц вычисляется на основе номинальных значений (напряжения и частоты) контролируемого электродвигателя переменного тока. Поддерживая постоянным значение отношения В/Гц мы можем поддерживать относительно постоянным магнитный поток в зазоре двигателя. Если отношение В/Гц увеличивается тогда электродвигатель становится перевозбужденным и наоборот если отношение уменьшается двигатель находится в недовозбужденном состоянии.
Зависимость частоты питания двигателя от времени при скалярном упрравлении
Изменение напряжения питания электродвигателя при скалярном управлении
На низких оборотах необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение В/Гц на низких оборотах устанавливают выше чем номинальное значение. Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями.
В применении к асинхронным двигателям
При скалярном методе управления, скорость асинхронного электродвигателя контролируется установкой величины напряжения и частоты статора, таким образом, чтобы магнитное поле в зазоре поддерживалось на нужной величине. Для поддержания постоянного магнитного поля в зазоре, отношение В/Гц должно быть постоянным на разных скоростях.
Для поддержания постоянного магнитного поля в зазоре, отношение В/Гц должно быть постоянным на разных скоростях.
Скалярное управление без датчика скорости
При увеличении скорости напряжение питания статора так же должно пропорционально увеличиваться. Однако синхронная частота асинхронного двигателя не равна частоте вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Таким образом система контроля со скалярным управлением без обратной связи не может точно контролировать скорость при наличии нагрузки. Для решения этой задачи в систему может быть добавлена обратная связь по скорости, а следовательно и компенсация скольжения [2].
Скалярное управление с датчиком скорости
Скалярное управление электродвигателями переменного тока — хорошая альтернатива для приложений, где нет переменной нагрузки и не требуется хорошая динамика (вентиляторы, насосы). Для работы скалярного управления не требуется датчик положения ротора, а скорость ротора может быть оценена по частоте питающего напряжения. Когда используется скалярное управление, не требуется высокопроизводительный цифровой сигнальный процессор как в случае с векторным управлением.
Когда используется скалярное управление, не требуется высокопроизводительный цифровой сигнальный процессор как в случае с векторным управлением.
При скалярном управлении электродвигателем токи статора не контролируются напрямую.
СДПМ со скалярным методом управления может легко стать неуправляемым (выйти из синхронного состояния) особенно когда момент нагрузки превышает значение предельного момента электропривода. Скалярный метод не подходит для контроля СДПМ на низких оборотах для приложений, требующих высокую динамику [1].
- Метод скалярного управления относительно прост в реализации, но обладает несколькими существенными недостатками:
- во-первых, если не установлен датчик скорости нельзя управлять скоростью вращения вала асинхронного двигателя, так как она зависит от нагрузки (наличие датчика скорости решает эту проблему), а вслучае с синхронным двигателем при изменении нагрузки — можно совсем потерять управление;
- во-вторых, нельзя управлять моментом.
 Конечно, эту задачу можно решить с помощью датчика момента, но стоимость его установки очень высока, и будет скорее всего выше самого электропривода. При этом управление моментом будет очень инерционным;
Конечно, эту задачу можно решить с помощью датчика момента, но стоимость его установки очень высока, и будет скорее всего выше самого электропривода. При этом управление моментом будет очень инерционным; - также нельзя управлять одновременно моментом и скоростью.
 Конечно, эту задачу можно решить с помощью датчика момента, но стоимость его установки очень высока, и будет скорее всего выше самого электропривода. При этом управление моментом будет очень инерционным;
Конечно, эту задачу можно решить с помощью датчика момента, но стоимость его установки очень высока, и будет скорее всего выше самого электропривода. При этом управление моментом будет очень инерционным;
Скалярное управление достаточно для большинства задач в которых применяется электропривод с диапазоном регулирования частоты вращения двигателя до 1:10.
Когда требуется максимальное быстродействие, возможность регулирования в широком диапазоне скоростей и возможность управления моментом электродвигателя используется векторное управление.
- Cristian Busca. Open loop low speed control for PMSM in high dynamic application.- Aalborg, Denmark.: Aalborg universitet, 2010
- Bial Akin, Nishant Garg. Scalar (V/f) control of 3-phase induction motors. Application report. SPRABQ8.- Dallas, USA.:Texas Instruments
Библиографический список
Векторное и скалярное управление асинхронным двигателем (видео)
Электропривод сегодня является основой большинства подъемно-транспортных, обрабатывающих комплексов. Одним из способов их плавной работы является векторное управление асинхронным двигателем, преобразующим электрическую энергию в механическую – вращение приводного вала и связанных с ним механизмов.
Одним из способов их плавной работы является векторное управление асинхронным двигателем, преобразующим электрическую энергию в механическую – вращение приводного вала и связанных с ним механизмов.
1
Что такое асинхронный двигатель?
2
Как можно управлять скоростью вращения двигателя?
2.1
Управление асинхронным двигателем
3
Формы и схема векторного управления
4
Управление частотными контроллерами
4.1
Управление частотными контроллерами
Что такое асинхронный двигатель?
Прежде чем переходить к модели, алгоритмам и системам управления электроприводом, нужно точно знать, что он собой представляет. Это позволяет выявить в его цепи такие моменты, которые можно будет использовать для организации плавного изменения ключевых характеристик (частота/скорость вращения, напряжение).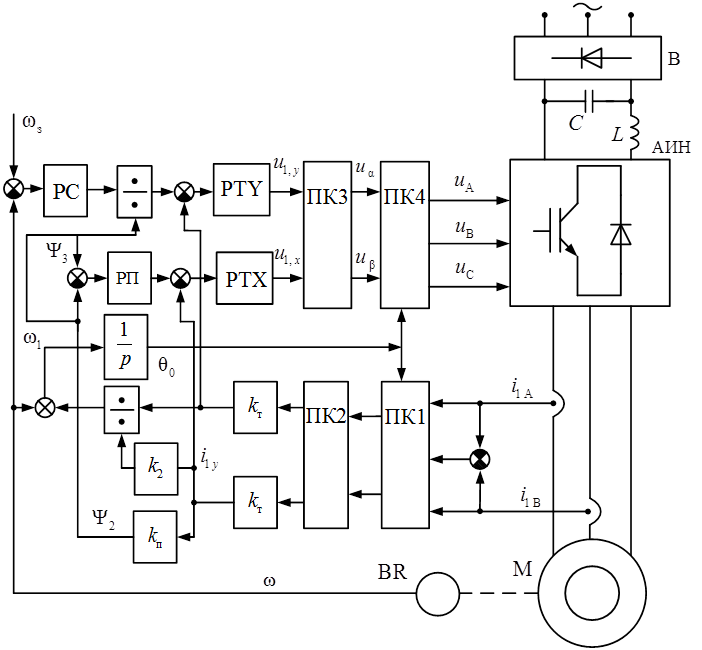 Соответственно, можно определить параметры контроллера, разработать технологические карты для его размещения в шкафу и обслуживания.
Соответственно, можно определить параметры контроллера, разработать технологические карты для его размещения в шкафу и обслуживания.
Работа любого асинхронного двигателя базируется на возбуждении на контактных обмотках магнитного поля при подаче электричества от шкафа управления. Оно возникает на статоре – неподвижной части двигателя, которая состоит из кольцевого сердечника (магнитопровода), собранного из отдельных металлических пластин. Каждая из них имеет концентрические пазы на внутренней стороне кольца, которые при совмещении образуют продольные пазы. Они служат для намотки проволоки, составляющей основу статорной обмотки.
Также асинхронный двигатель имеет подвижную часть – ротор, совмещенный с приводным валом. Он также имеет пластинчатый сердечник с пазами, но уже на внешней стороне. Вместо проволоки используются медные прутки, которые по краям замыкаются пластинами (такой вариант двигателя называется с короткозамкнутым ротором).
За счет того, что частоты вращения магнитных полей статора и ротора отличаются, в обмотках последнего за счет индукции наводится электрический ток. Он, в свою очередь, побуждает электромагнитную силу, приводящую ротор в движение (вращение). Разница частот обычно называется скольжением. Его величина составляет порядка 2…10%.
Он, в свою очередь, побуждает электромагнитную силу, приводящую ротор в движение (вращение). Разница частот обычно называется скольжением. Его величина составляет порядка 2…10%.
Как можно управлять скоростью вращения двигателя?
Очевидно, что двигатель в обычном режиме работы от сети (электрического шкафа) имеет стандартную скорость/частоту вращения. Это ограничивает прямое его использование, вынуждая применять различные редукторные механизмы для понижения частоты до требуемой. Но даже тогда нет возможности динамично менять обороты, а вместе с ними, мощность, подачу, поскольку все равно остаются фиксированными частоты на выходе из двигателя и редуктора. Для расширения существующих рамок используют разные способы управления (частотные, импульсные, фазные и т. д), которые можно разделить на две большие группы:
- Скалярное. Как правило, используется на приводных двигателях компрессорных, вентиляторных, насосных и прочих механизмов, где требуется контроль скорости вращения или любого другого параметра, связанного с датчиками,
- Векторное. Это усовершенствованная концепция, которая предполагает раздельный, независимый контроль, изменение момента и магнитного потока. Токосцепление ротора поддерживается на постоянном уровне, что позволяет сохранить максимальный показатель момента.
 Это усовершенствованная концепция, которая предполагает раздельный, независимый контроль, изменение момента и магнитного потока. Токосцепление ротора поддерживается на постоянном уровне, что позволяет сохранить максимальный показатель момента.
Это усовершенствованная концепция, которая предполагает раздельный, независимый контроль, изменение момента и магнитного потока. Токосцепление ротора поддерживается на постоянном уровне, что позволяет сохранить максимальный показатель момента.Управление асинхронным двигателем
Отличие скалярного от векторного управления как раз заключается в возможности осуществления контроля возбуждения (потока). Фактически, он представляется как двигатель постоянного тока, имеющий независимые друг от друга обмотки. Такой подход позволяет создать подобную математическую модель системы работы контроллера.
Формы и схема векторного управления
Все существующие на сегодня системы векторного управления работой двигателей можно разделить на две группы:
- Датчиковые. Блок управления работой двигателя имеет с ним обратную связь по скорости, с помощью расположения на валу соответствующих датчиков,
- Бездатчиковые. Это системы, которые работают без датчиков скорости на основном валу.
 Это системы, которые работают без датчиков скорости на основном валу.
Это системы, которые работают без датчиков скорости на основном валу.Датчиковые системы являются более сложными, так как точность контроля составляет 1:10000. Бездатчиковые системы работают на уровне не более 1:100. Все частотники с учетом уровня создаваемых помех устанавливаются в центральных или отдельных шкафах.
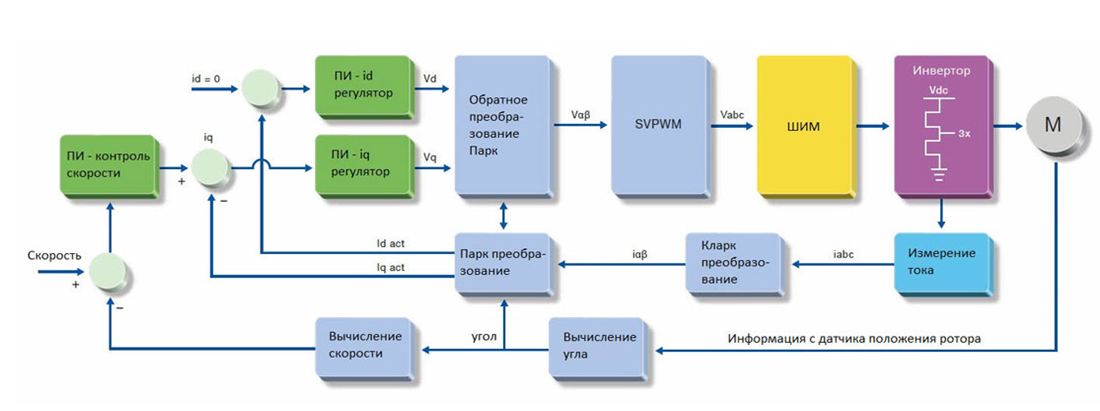
Если представить все выше сказанное как наглядную схему, то получится нечто следующее:
Здесь можно видеть такие ключевые компоненты системы управления, как:
- АД – собственно, асинхронный двигатель (объект контроля),
- БРП – логический блок регуляторов для переменных уравнения,
- БВП – логический блок, отвечающий за вычисления по переменным,
- БЗП – блок, задающий значения переменных,
- ДС – датчик скорости на валу двигателя,
- АИН ШИМ – блок амплитудно-импульсной/широтно-импульсной модуляции.
То, что на схеме отображено в виде блоков, на практике является всего лишь параметрическими элементами цепи управления, которая реализуется на микроконтроллере. Соответственно, сам контроллер и сопутствующие исполнительные механизмы монтируются в электрический шкаф. Для правильного монтажа разрабатывается технологическая карта.
Соответственно, сам контроллер и сопутствующие исполнительные механизмы монтируются в электрический шкаф. Для правильного монтажа разрабатывается технологическая карта.
Управление частотными контроллерами
Современные преобразователи частоты тока/напряжения работают и по скалярному, и по векторному варианту, используя параметрические математические модели, реализованные в программном коде встроенного микроконтроллера. Частотники электронного типа работают на тиристорных мостовых схемах и включают следующие основные компоненты:
- Выпрямитель – тиристорный или транзисторный мост, преобразующий переменный ток в постоянный,
- Инвертор – блок АИМ/ШИМ, работающий по обратному принципу, то есть преобразующий постоянный ток в переменный.
Поскольку такой переход так или иначе влияет на форму графика выходного напряжения, то блочный контроллер/частотник может использовать в схеме дросселя и специальные ЕМС фильтры.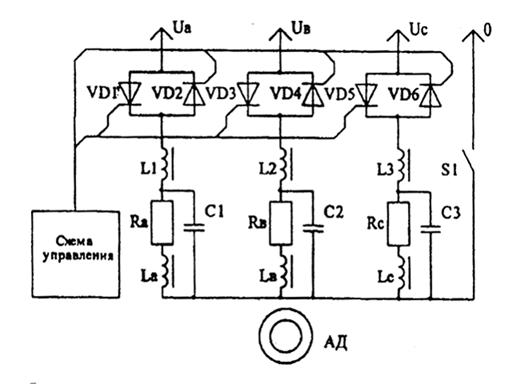 Последние применяют для снижения интенсивности электромагнитных помех.
Последние применяют для снижения интенсивности электромагнитных помех.
Управление частотными контроллерами
Центральный контроллер обеспечивает параметрическое управление схемой, а также вспомогательными задачами, например, диагностикой состояния, защитой от перегрузок и т. п. Сам частотник обычно монтируется в отдельный шкаф, чтобы уменьшить электромагнитные помехи на оборудование.
В целом, векторное управление, организованное на современном контроллере и преобразователе частоты, позволяет добиться плавного регулирования ключевых величин, а также побочных параметров работы оборудования. Ввиду наличия электромагнитных помех при работе, частотники обычно размещают отдельно от основного электрического шкафа.
Скалярное управление
Дмитрий Левкин
Отношение В/Гц рассчитывается на основе номинальных значений (напряжения и частоты) управляемого двигателя переменного тока. Поддерживая значение отношения В/Гц постоянным, мы можем поддерживать относительно постоянный магнитный поток в зазоре двигателя.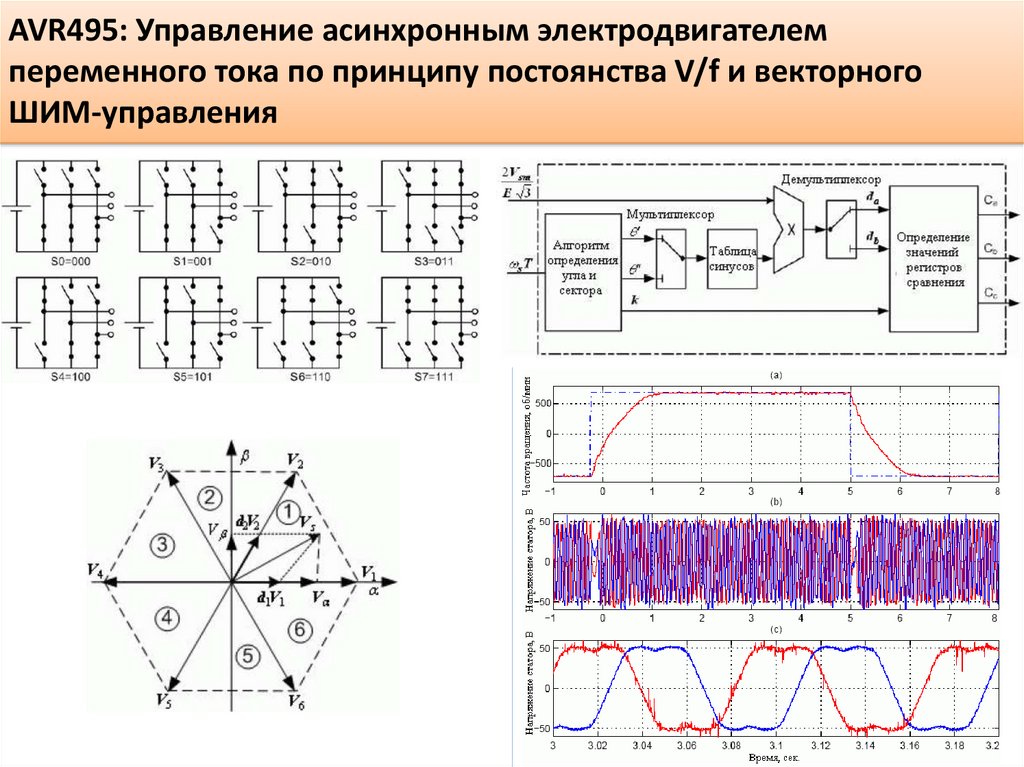 Если отношение В/Гц увеличивается, то двигатель перевозбуждается, и наоборот, если отношение уменьшается, двигатель находится в невозбужденном состоянии.
Если отношение В/Гц увеличивается, то двигатель перевозбуждается, и наоборот, если отношение уменьшается, двигатель находится в невозбужденном состоянии.
Зависимость частоты питающей сети электродвигателя от времени при скалярном управлении
Изменение напряжения мощности двигателя при скалярном управлении
На малой скорости необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение В/Гц на малой скорости устанавливается выше номинального значения. Метод скалярного управления наиболее широко используется для управления асинхронными электродвигателями.
Применительно к асинхронным двигателям
При скалярном методе управления скорость асинхронного двигателя регулируется путем задания напряжения и частоты статора таким образом, чтобы магнитное поле в зазоре поддерживалось на заданном значении. Для поддержания постоянного магнитного поля в зазоре отношение В/Гц должно быть постоянным на разных скоростях.
Скалярное управление без датчика скорости
При увеличении скорости должно пропорционально увеличиваться напряжение питания статора. Однако синхронная скорость (частота) асинхронного двигателя не равна скорости (частоте) вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Таким образом, регулятор со скалярным управлением без обратной связи не может точно управлять скоростью при наличии нагрузки. Для решения этой проблемы в систему управления можно добавить обратную связь по скорости и, следовательно, компенсацию скольжения [2].
Однако синхронная скорость (частота) асинхронного двигателя не равна скорости (частоте) вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Таким образом, регулятор со скалярным управлением без обратной связи не может точно управлять скоростью при наличии нагрузки. Для решения этой проблемы в систему управления можно добавить обратную связь по скорости и, следовательно, компенсацию скольжения [2].
Скалярное управление с датчиком скорости
Скалярное управление двигателями переменного тока является хорошей альтернативой для приложений, где нет переменной нагрузки и не требуется хорошая динамика (вентиляторы, насосы). Скалярное управление не требует датчика положения ротора, а скорость вращения ротора можно оценить по частоте питающего напряжения. При скалярном управлении не требуется высокопроизводительный цифровой сигнальный процессор, как в случае с векторным управлением.
При скалярном управлении двигателем токи статора напрямую не контролируются.
СДПМ со скалярным управлением может легко стать неуправляемым (выйти из синхронного состояния), особенно когда момент нагрузки превышает значение предельного значения момента привода. Скалярный метод не подходит для управления СДПМ на низкой скорости для приложений, требующих высокой динамики [1].
- Метод скалярного управления относительно прост в реализации, но имеет несколько существенных недостатков:
- если датчик скорости не установлен, то скорость вращения вала асинхронного двигателя не может регулироваться, так как она зависит от нагрузки (наличие датчика скорости решает эту проблему), а в случае синхронного двигателя при меняется нагрузка, можно полностью потерять управление;
- крутящий момент не может контролироваться. Конечно, эту задачу можно решить с помощью датчика крутящего момента, но стоимость его установки очень высока, и, скорее всего, будет выше самого электропривода. В этом случае управление крутящим моментом будет очень инерционным;
- нельзя одновременно контролировать крутящий момент и скорость.
Скалярного управления достаточно для большинства задач, в которых используется электропривод с диапазоном регулирования скорости двигателя до 1:10.
Когда требуется максимальная производительность, возможность управления в широком диапазоне скоростей и возможность управления крутящим моментом двигателя используется векторное управление.
- Кристиан Буска. Низкоскоростное управление с разомкнутым контуром для СДПМ в высокодинамичных приложениях. — Ольборг, Дания.: Ольборгский университет, 2010
- Биал Акин, Нишант Гарг. Скалярное (V/f) управление трехфазными асинхронными двигателями. Отчет о применении. SPRABQ8.- Даллас, США.: Texas Instruments
Каталожные номера
.
Читайте также
Гистерезис двигателя
Конструкция, принцип действия, преимущества и недостатки гистерезисного двигателя
Универсальный двигатель
Универсальный двигатель представляет собой однофазный коллекторный двигатель, который работает как от сети постоянного, так и переменного тока
Электродвигатель
Классификация электродвигателей, их преимущества и недостатки. Конструкция, принцип работы, схемы и параметры электродвигателя. Заявки и список производителей
Трехфазный асинхронный двигатель
Конструкция и принцип работы трехфазного двигателя переменного тока. Схемы подключения и методы управления асинхронным двигателем
Что такое скалярное управление ЧРП?
В предыдущем посте о частотно-регулируемом приводе мы описали некоторые общеизвестные факты. Что они собой представляют, из каких элементов состоят и каково их назначение. Пришло время более подробно рассмотреть частотно-регулируемые приводы. Давайте сосредоточимся на скалярном управлении частотно-регулируемым приводом!
Введение режимов управления VFD
Частотно-регулируемые приводы имеют различные названия, формы и алгоритмы управления. Хотя OEM-производители приводов спешат реализовать новые функции и алгоритмы, принципы всегда одни и те же, и поэтому мы можем разделить их на две группы алгоритмов управления:
Хотя OEM-производители приводов спешат реализовать новые функции и алгоритмы, принципы всегда одни и те же, и поэтому мы можем разделить их на две группы алгоритмов управления:
— скалярное управление — , который является самым простым режимом управления ЧРП. Он широко используется в динамически нетребовательных приложениях, таких как HVAC или управление насосами. Его принцип основан на управлении установившимися значениями двигателя, которые представляют собой амплитуды и пульсации питающего напряжения – в зависимости от его напряжения и частоты. Положение векторов тока и потока не учитывается, поэтому управление переходными состояниями двигателя отсутствует.
— Векторное управление — в котором используются сложные алгоритмы развязки векторов крутящего момента и потока для обеспечения высокодинамического управления установившимися и переходными состояниями машины. Он используется в очень требовательных динамических приложениях, где решающее значение имеет точное управление скоростью и крутящим моментом.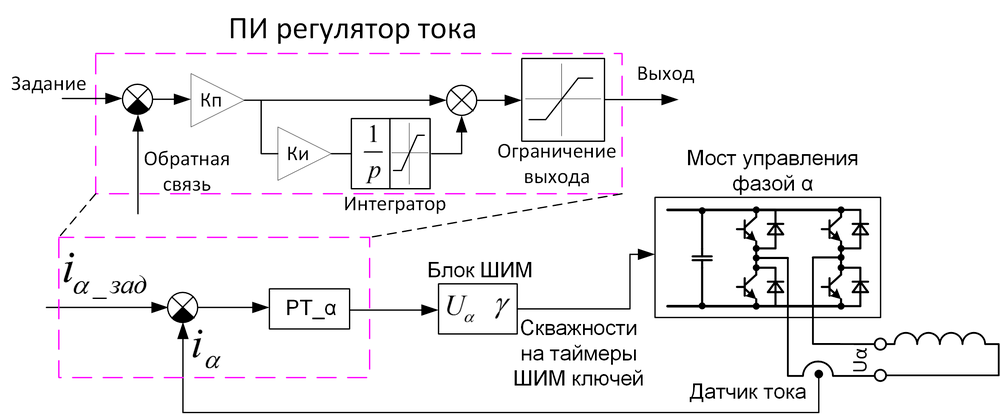 Хорошими примерами являются краны или лебедки.
Хорошими примерами являются краны или лебедки.
Оба варианта имеют свои преимущества и ограничения. Поговорим о скалярном управлении или так называемом u/f-управлении.
Принцип скалярного управления
Целью управления скоростью является изменение скорости двигателя в широком диапазоне для конкретной нагрузки. Но как мы можем изменить скорость двигателя без изменения нагрузки или крутящего момента?
Одна из идей может заключаться в изменении напряжения питания, как это делается в приложениях с плавным пуском.
К сожалению, снижение напряжения заставляет двигатель потреблять избыточный ток для обеспечения ожидаемой мощности, что приводит к перегреву обмоток двигателя. С другой стороны, повышение напряжения за счет превышения предела изоляции также повредит обмотки. В конце концов, мы сможем изменять скорость двигателя только примерно на 10%.
Другая идея может заключаться в изменении частоты подаваемого напряжения. Помимо полюсов двигателя, частота является компонентом, используемым для расчета скорости двигателя.
Уменьшая частоту, мы уменьшаем импедансы статора и ротора и, как следствие, увеличиваем ток намагничивания, переводящий двигатель в состояние глубокого насыщения, что увеличивает потери и вызывает снижение эффективности. Увеличение частоты выше номинального значения влияет на потерю крутящего момента обратно пропорционально частоте.
Для заданной нагрузки крутящий момент двигателя выражается следующим уравнением:
Какой результат приблизительно соответствует соотношению:
Отношение U/f определяет плотность магнитного потока. Поддерживая постоянную плотность магнитного потока и, таким образом, постоянное отношение U/f, мы обеспечиваем оптимальный и постоянный крутящий момент для нагрузки двигателя. Это означает, что если мы хотим уменьшить скорость двигателя, нам нужно уменьшить частоту вместе с напряжением. Сохраняя постоянное соотношение, мы преодолеем указанные проблемы.
Отношение U/f
Линейная характеристика U/f определяется несколькими точками (очень часто двумя крайними точками). Часто существует возможность увеличения начального напряжения для компенсации потерь напряжения на сопротивлении статора на низких частотах. Если бы не было повышения напряжения, выбор частоты ниже минимальной частоты привел бы к остановке вала двигателя.
Часто существует возможность увеличения начального напряжения для компенсации потерь напряжения на сопротивлении статора на низких частотах. Если бы не было повышения напряжения, выбор частоты ниже минимальной частоты привел бы к остановке вала двигателя.
В дополнение к линейным характеристикам производители частотно-регулируемых приводов часто реализуют квадратичные (U/f 2 ) и пользовательские (определяемые пользователем многоточечные) характеристики для согласования с различными кривыми нагрузки.
Повышение напряжения
Статор двигателя состоит из группы катушек с использованием значительного количества медных проводов, и все медные провода имеют свое сопротивление. Из-за потери напряжения на этом сопротивлении мы видим одно ограничение скалярного управления. В нижней части характеристики U/f, когда мы работаем с двигателем на очень низкой скорости, напряжение, подаваемое на статор, может быть просто «поглощено» потерями напряжения на статоре, и в результате двигатель остановится.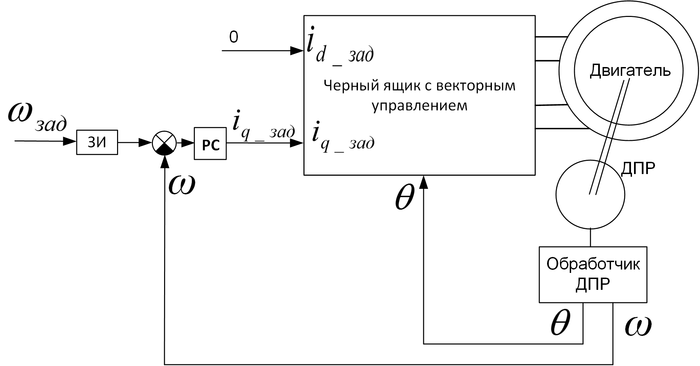 Чтобы преодолеть эту проблему, можно применить повышение напряжения к нижней части характеристики, чтобы создать необходимый крутящий момент для запуска двигателя. Выше порога ЧРП работает со своей линейной характеристикой.
Чтобы преодолеть эту проблему, можно применить повышение напряжения к нижней части характеристики, чтобы создать необходимый крутящий момент для запуска двигателя. Выше порога ЧРП работает со своей линейной характеристикой.
Компенсация скольжения
Скольжение асинхронного двигателя определяется как разница между скоростью вращения магнитного поля (синхронная скорость) и скоростью вращения ротора и представлена следующим соотношением:
Увеличение крутящего момента на валу (нагрузки) вызывая увеличение скольжения, что приводит к снижению скорости вращения. Если для приложения необходимо управление скоростью, а на двигателе не установлен энкодер, может оказаться удобной функция компенсации скольжения. Измеряется ток на выходе ЧРП и рассчитывается фактический крутящий момент. Этот расчет используется для увеличения частоты пропорционально крутящему моменту. Эта функция очень полезна, когда двигатель работает на низких частотах, но с высокой нагрузкой.
Предположим, у нас есть гипотетический двухполюсный двигатель с синхронной скоростью 3000 об/мин и скольжением 30 об/мин. Когда мы используем двигатель с высокой нагрузкой на номинальной скорости, мы получаем 1% ошибки скорости. Когда мы запускаем тот же двигатель с той же нагрузкой на скорости 300 об/мин, мы получаем 10%-ную ошибку. Здесь может пригодиться компенсация скольжения.
Когда мы используем двигатель с высокой нагрузкой на номинальной скорости, мы получаем 1% ошибки скорости. Когда мы запускаем тот же двигатель с той же нагрузкой на скорости 300 об/мин, мы получаем 10%-ную ошибку. Здесь может пригодиться компенсация скольжения.
Управление несколькими двигателями?
Да! Большинство частотно-регулируемых приводов на рынке позволяют управлять несколькими другими частотно-регулируемыми приводами в различных конфигурациях ведущий-ведомый, но это еще не все. Используя частотно-регулируемый привод со скалярным управлением, вы можете «обмануть» свои частотно-регулируемые приводы, чтобы увидеть, что несколько меньших двигателей подключены к нему как один более крупный асинхронный двигатель, и управлять всеми ими одновременно с одинаковой скоростью. Однако есть некоторые важные ограничения:
- Общая сумма токов всех двигателей не может превышать номинальный ток ЧРП,
- Все двигатели должны быть идентичными,
- Каждый двигатель должен иметь отдельную защиту от перегрузки по току,
- Работа нескольких двигателей на одном ЧРП может потребовать установки дополнительных фильтров ,
- Автоматические выключатели и контакторы двигателей должны быть замкнуты перед запуском ЧРП и не могут быть разомкнуты до тех пор, пока двигатели не перестанут вращаться после остановки ЧРП.
Преимущества и недостатки скалярного управления ЧРП
Как я уже говорил, управление U/f можно найти в нетребовательных приложениях. Из-за своей простоты этот режим управления имеет следующие недостатки по сравнению с векторным управлением:
- Нет контроля переходных состояний машины,
- Нет контроля момента,
- Колебания скорости вокруг заданного значения,
- Низкий момент на низкие частоты,
Которые противоречат следующим преимуществам:
- Низкая стоимость и высокая простота,
- Простота ввода в эксплуатацию,
- Возможность использования 1 ЧРП для управления несколькими двигателями,
Это делает скалярный ЧРП идеальным выбором для насосов, вентиляторов, компрессоров, воздуходувок, конвейеров и всех других типов нагрузок, где нет необходимости в точное управление скоростью или крутящим моментом. Хорошими кандидатами для внедрения VFDS на борту являются насосы забортной воды, вентиляционные вентиляторы или вентиляторы охлаждения — контуры потока или температуры, где скалярное управление VFD может обеспечить экономию энергии.
Краткое сравнение с векторным управлением
| Scalar control | Vector control |
| Low cost | High cost |
| Excellent for non-demanding applications | Excellent for high dynamic applications |
| Low complexity | Высокая сложность |
| Низкий крутящий момент на низких частотах | Оптимальный крутящий момент во всем диапазоне скоростей |
| Простота использования | Require more preparations |
| Multi Motor Control | Controlling 1 motor at the time |
| Lower precision with speed control | Excellent precision of speed and torque |
Comparison of VFD scalar control with Vector control
Хотите узнать больше о частотно-регулируемых приводах? Ищите примечания по применению и технические руководства от крупнейших производителей приводов переменного тока или следите за новостями.