Содержание
Как отличить асинхронный двигатель от двигателя постоянного тока » сайт для электриков
Устройство, принцип действия асинхронного двигателя
Асинхронный двигатель – это машина переменного тока. Слово «асинхронный» означает неодновременный. При этом имеется в виду, что у асинхронных двигателей частота вращения магнитного поля отличается от частоты вращения ротора. Основными частями машины являются статор и ротор, отделенные друг от друга равномерным воздушным зазором.
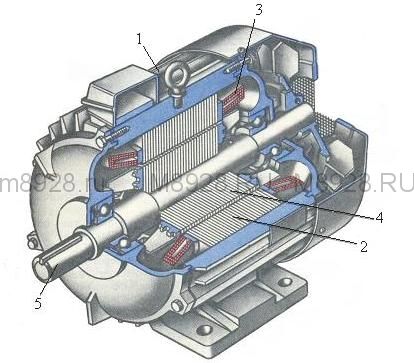
Рис.1. Устройство асинхронных двигателей
Статор – неподвижная часть машины (рис. 1, а ). Его сердечник с целью уменьшения потерь на вихревые токи набирают из штампованных листов электротехнической стали толщиной 0,35 – 0,5 мм, изолированных друг от друга слоем лака. В пазы магнитопровода статора укладывается обмотка. В трехфазных двигателях обмотка трехфазная. Фазы обмотки могут соединяться в звезду или в треугольник в зависимости от величины напряжения сети.
Ротор – вращающаяся часть двигателя. Магнитопровод ротора представляет собой цилиндр, набранный из штампованных листов электротехнической стали (рис. 1, б. в ). В пазах ротора укладывают обмотку, в зависимости от типа обмотки роторы асинхронных двигателей делятся на короткозамкнутые и фазные (с контактными кольцами). Короткозамкнутая обмотка представляет собой неизолированные медные или алюминиевые стержни (рис. 1, г ), соединенные с торцов кольцами из этого же материала («беличья клетка»).
Магнитопровод ротора представляет собой цилиндр, набранный из штампованных листов электротехнической стали (рис. 1, б. в ). В пазах ротора укладывают обмотку, в зависимости от типа обмотки роторы асинхронных двигателей делятся на короткозамкнутые и фазные (с контактными кольцами). Короткозамкнутая обмотка представляет собой неизолированные медные или алюминиевые стержни (рис. 1, г ), соединенные с торцов кольцами из этого же материала («беличья клетка»).
У фазного ротора (см. рис. 1, в ) в пазах магнитопровода уложена трехфазная обмотка, фазы которой соединены звездой. Свободные концы фаз обмотки присоединены к трем медным контактным кольцам, насаженным на вал двигателя. Контактные кольца изолированы друг от друга и от вала. К кольцам прижаты угольные или медно-графитные щетки. Через контактные кольца и щетки в обмотку ротора можно включить трехфазный пуско-регулировочный реостат.
Преобразование электрической энергии в механическую в асинхронном двигателе осуществляется посредством вращающегося магнитного поля. Вращающееся магнитное поле это постоянный поток, вращающийся в пространстве с постоянной угловой скоростью.
Вращающееся магнитное поле это постоянный поток, вращающийся в пространстве с постоянной угловой скоростью.
Необходимыми условиями возбуждения вращающегося магнитного поля являются:
— пространственный сдвиг осей катушек статора,
— временной сдвиг токов в катушках статора.
Первое требование удовлетворяется соответствующим расположением намагничивающих катушек на магнитопроводе статора. Оси фаз обмотки смещены в пространстве на угол 120º. Второе условие обеспечивается подачей на катушки статора трехфазной системы напряжений.
При включении двигателя в трехфазную сеть в обмотке статора устанавливается система токов одинаковой частоты и амплитуды, периодические изменения которых относительно друг друга совершаются с запаздыванием на 1/3 периода.
Токи фаз обмотки создают магнитное поле, вращающееся относительно статора с частотой n1. об/мин, которая называется синхронной частотой вращения двигателя:
где f1 – частота тока сети, Гц;
р – число пар полюсов магнитного поля.
При стандартной частоте тока сети Гц частота вращения поля по формуле (1) и в зависимости от числа пар полюсов имеет следующие значения:
Вращаясь, поле пересекает проводники обмотки ротора, наводя в них ЭДС. При замкнутой обмотке ротора ЭДС вызывает токи, при взаимодействии которых с вращающимся магнитным полем возникает вращающий электромагнитный момент. Частота вращения ротора в двигательном режиме асинхронной машины всегда меньше частоты вращения поля, т.е. ротор «отстает» от вращающегося поля. Только при этом условии в проводниках ротора наводится ЭДС, протекает ток и создается вращающий момент. Явление отставания ротора от магнитного поля называется скольжением. Степень отставания ротора от магнитного поля характеризуется величиной относительного скольжения
где n2 – частота вращения ротора, об/мин.
Для асинхронных двигателей скольжение может изменяться в пределах от 1 (пуск) до величины, близкой к 0 (холостой ход).
185.154.22.117 studopedia. ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам.
ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам.
ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
Благодаря удобству передачи на большие расстояния и легкости преобразования переменный ток успешно стал стандартом электроснабжения.
В сфере же производства электродвигателей его способность возбуждать переменное магнитное поле в статоре и соответственно индуцировать ток в короткозамкнутой обмотке ротора позволила создать асинхронные электродвигатели. В этом типе двигателей единственным испытывающим трение узлом остаются коренные подшипники якоря.
Ротор такого электродвигателя – это металлический цилиндр, в пазы которого под углом к оси вращения запрессованы или залиты токопроводящие жилы, на торцах ротора объединенные кольцами в одно целое. Переменное магнитное поле статора возбуждает в роторе, напоминающем беличье колесо, противоток и, соответственно, отталкивающее его от статора магнитное поле.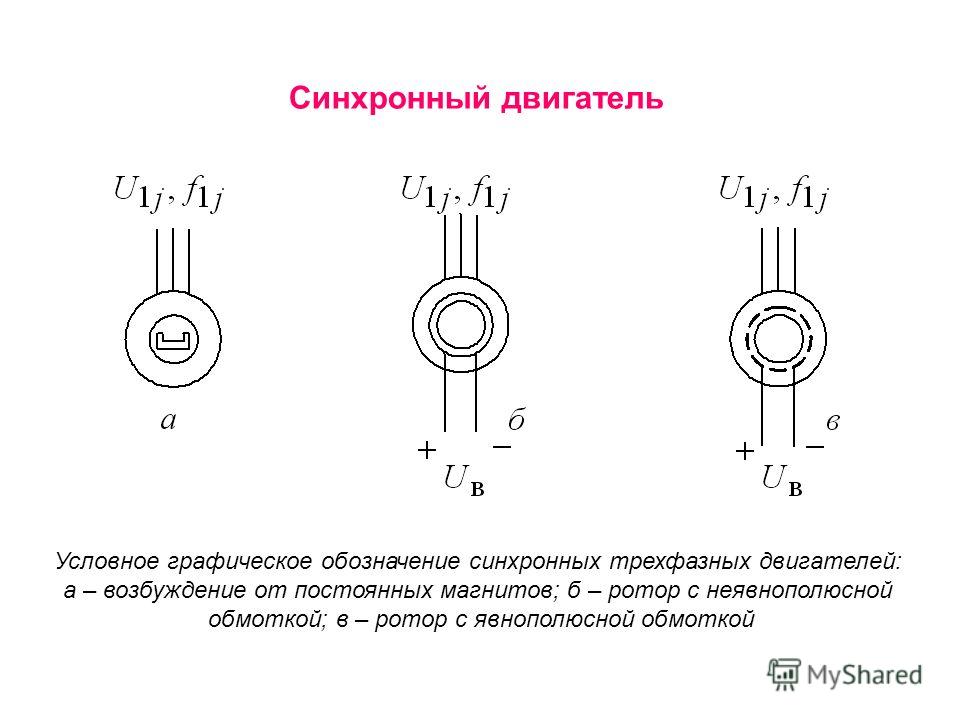
В зависимости от числа обмоток статора асинхронный двигатель может быть:
Однофазным – в этом случае главным недостатком двигателя становится невозможность самостоятельного запуска, так как вектор силы отталкивания проходит строго через ось вращения.
Для начала работы двигателю необходим или стартовый толчок, или включение отдельной пусковой обмотки, создающей дополнительный момент силы, смещающий их суммарный вектор относительно оси якоря.
Двухфазный электродвигатель имеет две обмотки, в которых фазы смещены на угол, соответствующий геометрическому углу между обмотками. В этом случае в электродвигателе создается так называемое вращающееся магнитное поле (спад напряженности поля в полюсах одной обмотки происходит синхронно с нарастанием его в другой).
Такой двигатель становится способным к самостоятельному запуску, однако имеет трудности с реверсом. Поскольку в современном электроснабжении не используются двухфазные сети, фактически электродвигатели этого рода применяются в однофазных сетях с включением второй фазы через фазовращающий элемент (обычно – конденсатор).
Трехфазный асинхронный электродвигатель – наиболее совершенный тип асинхронного мотора, так как в нем появляется возможность легкого реверса – изменение порядка включения фазных обмоток изменяет направление вращения магнитного поля, а соответственно и ротора.
Коллекторные двигатели переменного тока используются в тех случаях, когда требуется получение высоких частот вращения (асинхронные электродвигатели не могут превышать скорость вращения магнитного потока в статоре – для промышленной сети 50 Гц это 3000 об/мин).
Кроме того, они выигрывают в пусковом крутящем моменте (здесь он пропорционален току, а не оборотам) и имеют меньший пусковой ток, меньше перегружая электросеть при запуске. Также они позволяют легко управлять своими оборотами.
Обратной стороной этих достоинств становится дороговизна (требуется изготовление ротора с наборным сердечником, несколькими обмотками и коллектором, который к тому же сложнее балансировать) и меньший ресурс. Помимо необходимости в регулярной замене стирающихся щеток, со временем изнашивается и сам коллектор.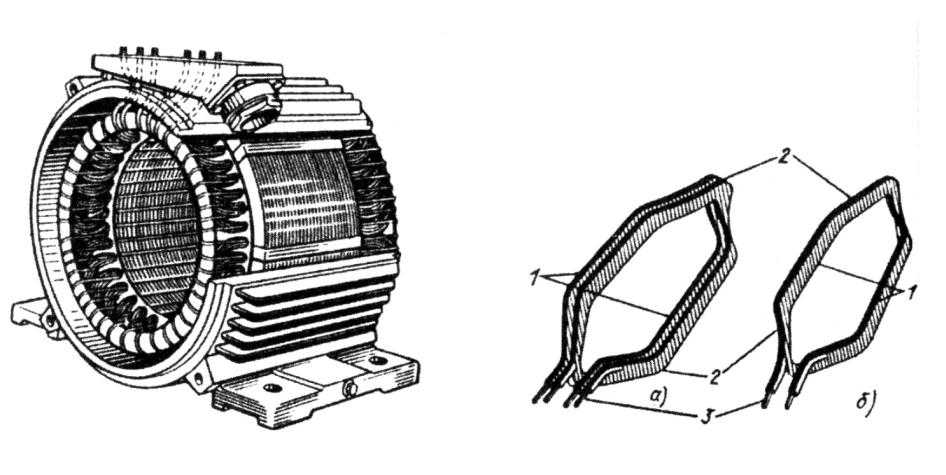
Синхронный электродвигатель имеет ту особенность, что магнитное поле ротора индуцируется не магнитным полем статора, а собственной намоткой, подключенной к отдельному источнику постоянного тока.
Благодаря этому частота его вращения равна частоте вращения магнитного поля статора, откуда и происходит сам термин «синхронный».
Как и двигатель постоянного тока, синхронный двигатель переменного тока является обратимым:
- при подаче напряжения на статор он работает как электродвигатель;
- при вращении от внешнего источника он сам начинает возбуждать в фазных обмотках переменный ток.
Основная область использования синхронных электродвигателей – высокомощные приводы. Здесь увеличение КПД относительно асинхронных электромоторов означает значительное снижение потерь электроэнергии.
Также синхронные двигатели используются в электротранспорте. Однако, для управления скоростью в этом случае требуются мощные частотные преобразователи, зато при торможении возможен возврат энергии в сеть.
Особенности
По способу взаимодействия ротора и вращающегося магнитного поля, устройства делятся на два вида – синхронные и асинхронные. В первом случае скорости вращения поля и ротора совпадают, во втором – отличаются.
Синхронная электрическая
Установки данного типа одинаково широко применяются в роли двигателей и генераторов. Подобные машины используются на всех электростанциях. Ротор имеет собственные магнитные полюсы.
Ротор представляет собой электромагнит на Iпост от стороннего источника, реже — постоянный магнит. Сторонним источником Iпост. обычно выступает генератор, смонтированный на валу машины. Но в некоторых случаях используют и аккумулятор.
Вращение обусловлено взаимодействием вращающегося магнитного поля статора и собственного поля ротора. Первое увлекает за собой второе, заставляя подвижный элемент вращаться с той же скоростью (режим двигателя). Если же вращать ротор сторонней механической силой, на выводах обмотки статора получится 3-фазное напряжение (режим генератора).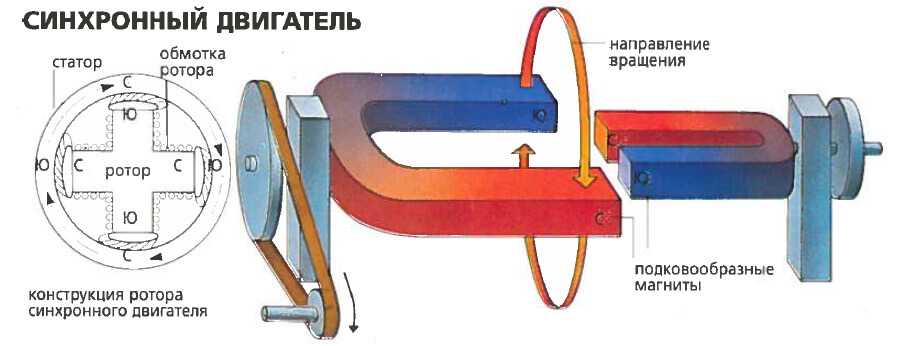
Асинхронная электрическая
Данное устройство в основном используется как двигатель. В сравнении с синхронной имеет более простую конструкцию, чем и объясняется широкое распространение. Ротор собственных магнитных полюсов не имеет, поскольку его магнитное поле является наведенным (у синхронных — собственное).
Асинхронные машины делятся на два вида:
- коллекторные;
- бесколлекторные.
Первые более разнообразны по характеристикам, но из-за наличия такого дорогого и малонадежного узла, коим является коллектор, сфера их использования ограничена.
Бесколлекторные устройства наиболее распространены, они делятся на два вида:
- с короткозамкнутым ротором;
- с фазным ротором.
Обмотка первого представляет собой обойму из медных или алюминиевых стержней в форме беличьего колеса, тогда как тело самого элемента изготовлено из ферромагнитной стали и представляет собой сердечник.
Вместе сердечники ротора и статора образуют магнитопровод, а имеющиеся на них обмотки работают подобно трансформаторным:
- в обмотках статора при подключении его клемм к 3-фазному напряжению формируется вращающееся магнитное поле, как было описано выше;
- для ротора движущееся относительно него вращающееся магнитное поле является переменным, отчего в его обмотке, согласно закону электромагнитной индукции, наводится ЭДС и возникает ток;
- он создает в обмотке ротора магнитное поле, которое взаимодействует с полем статора.
 Иными словами, возникает действующая на стержни ротора амперова сила. Он начинает вращаться вслед за полем статора.
Иными словами, возникает действующая на стержни ротора амперова сила. Он начинает вращаться вслед за полем статора.
 Иными словами, возникает действующая на стержни ротора амперова сила. Он начинает вращаться вслед за полем статора.
Иными словами, возникает действующая на стержни ротора амперова сила. Он начинает вращаться вслед за полем статора.Очевидно, что скорость вращения ротора V не может быть равна аналогичному параметру поля статора V0, поскольку при таких условиях последнее уже не будет переменным для роторной обмотки.
Потому данный двигатель и называют асинхронным. Если при вращении ротор обгоняет поле статора, машина переходит в режим генератора. Разность V и V0 характеризуется коэффициентом скольжения S = (V0 – V) / V0.
Короткозамкнутый ротор
У двигателей с короткозамкнутым ротором есть три недостатка, ограничивающих сферу применения:
- небольшой пусковой момент: при активации полюсы наведенного в роторе магнитного поля находятся под полюсами вращающегося поля статора;
- высокий пусковой ток: в 5-15 раз выше рабочего;
- в случае приложения нагрузки на вал более максимального момента двигатель останавливается.
Обмотка фазного ротора устроена подобно статорной. В момент пуска к ней подключается внешнее сопротивление, отчего взаимное расположение магнитных полей подвижного и неподвижного элементов меняется — полюса одного выводятся из-под полюсов другого. Возникает высокий момент трогания (или пусковой).
В момент пуска к ней подключается внешнее сопротивление, отчего взаимное расположение магнитных полей подвижного и неподвижного элементов меняется — полюса одного выводятся из-под полюсов другого. Возникает высокий момент трогания (или пусковой).
Синхронные и асинхронные электродвигатели
Синхронные и асинхронные электромоторы имеют общие условия для своей работы. Для этого необходимо магнитное поле, максимальная величина которого перемещается в пространстве. Такое поле может быть создано двумя или большим числом обмоток. Обычные конструкции синхронных и асинхронных электромоторов содержат две или три обмотки.
Они размещаются на массивных ферримагнитных сердечниках, усиливающих магнитное поле. Для трёх обмоток применяется трёхфазное напряжение, для двух обмоток – двухфазное или одна фаза с фазосдвигающим конденсатором. Но с таким конденсатором к однофазной сети можно подключить и трёхфазные двигатели.
Если ротор электромотора создаёт постоянное магнитное поле, либо от постоянных магнитов, либо от встроенного в ротор источника питания постоянного тока, либо от внешнего источника питания постоянного тока через кольца со щётками такой двигатель является синхронным. В нём частота оборотов и частота напряжения источника питания одинаковы. В асинхронных двигателях используется немагнитный ротор без явно выраженных полюсов, колец со щётками, встроенных выпрямителей и комбинированных деталей из различных материалов. Исключением является синхронный гистерезисный двигатель.
В нём частота оборотов и частота напряжения источника питания одинаковы. В асинхронных двигателях используется немагнитный ротор без явно выраженных полюсов, колец со щётками, встроенных выпрямителей и комбинированных деталей из различных материалов. Исключением является синхронный гистерезисный двигатель.
Ротор асинхронного двигателя работает как вторичная обмотка трансформатора, которая замкнута накоротко. Но ток в его роторе может возникнуть только при более медленном вращении в сравнении с магнитным полем статора. Такое различие скоростей называется скольжением. Простота конструкции и соответствующая надёжность делают асинхронный электромотор наиболее широко используемым.
Предыстория.
Якоби Борис Семенович
Уже в 1821 году, знаменитый британский ученый Майкл Фарадей продемонстрировал принцип преобразования электромагнитным полем электрической энергии в механическую энергию. Установка состояли из подвешенного провода, которых окунался в ртуть. Магнит устанавливался посередине колбы с ртутью. При замыкании цепи, провод начинал вращение вокруг магнита, демонстрируя то, что вокруг провода, эл. током, образовывалось электрическое поле.
При замыкании цепи, провод начинал вращение вокруг магнита, демонстрируя то, что вокруг провода, эл. током, образовывалось электрическое поле.
Эту модель двигателя часто демонстрировали в школах и университетах. Данный двигатель считается самым простым видом из всего класса электродвигателей. Впоследствии он получил продолжение в виде Колеса Барлова. Однако новое устройство носило лишь демонстрационный характер, поскольку вырабатываемые им мощности были слишком малы.
Ученые и изобретатели работали над двигателем с целью использования его в производственных нуждах. Все они стремились к тому, чтобы сердечник двигателя двигался в магнитном поле вращательно-поступательно, на манер поршня в цилиндре паровой машины. Русский изобретатель Б.С. Якоби сделал все гораздо проще. Принцип работы его двигателя заключался в попеременном притяжении и отталкивании электромагнитов. Часть электромагнитов были запитаны от гальванической батареи, и направление течения тока в них не менялась, а другая часть подключалась к батарее через коммутатор, благодаря которому изменялось направление течения тока через каждый оборот. Полярность электромагнитов менялась, и каждый из подвижных электромагнитов то притягивался, то отталкивался от соответствующего ему неподвижного электромагнита. Вал приходил в движение.
Полярность электромагнитов менялась, и каждый из подвижных электромагнитов то притягивался, то отталкивался от соответствующего ему неподвижного электромагнита. Вал приходил в движение.
электродвигатель Бориса Якоби
Изначально мощность двигателя была небольшой и составляла всего 15 Вт, после доработок, Якоби удалось довести мощность до 550 Вт.. 13 сентября 1838 году, лодка, оборудованная этим двигателем, плыла с 12 пассажирами по Неве, против течения, развивая при этом скорость в 3 км/ч. Двигатель был запитан от большой батареи, состоящей из 320 гальванических элементов. Мощность современных электрических двигателей превышает 55 кВт. По вопросом прибретения электрических двигателей смотрите здесь.
История
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в ртуть. Постоянный магнит был установлен в середине ванны со ртутью. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется на школьных уроках физики, вместо токсичной ртути используют электролит. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется на школьных уроках физики, вместо токсичной ртути используют электролит. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, то есть так, как движется поршень в цилиндре паровой машины. Русско-прусский учёный Б.С. Якоби пошёл иным путём. В 1834 г. он создал первый в мире практически пригодный электродвигатель со вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б.С. Якоби писал, что его двигатель несложен и «даёт непосредственно круговое движение, которое гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через коммутатор, с помощью которого направление тока в каждом электромагните изменялось восемь раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременно притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довёл мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
В 1839 г. Якоби построил лодку с электромагнитным двигателем, который от 69 элементов Грове развивал 1 лошадиную силу и двигал лодку с 14 пассажирами по Неве против течения. Это было первое применение электромагнетизма к передвижению в больших размерах.
Это было первое применение электромагнетизма к передвижению в больших размерах.
Частотно-регулируемый привод
В первом приближении существенных отличий между этими приводами не так и много; однако, при более детальном рассмотрении, выявляются характерные особенности приводов и различие физических принципов функционирования. Дале в статье раскрываются аспекты отличия приводов по следующим пунктам:
- характеристики двигателей, как электромеханических преобразователей
- характеристики преобразователей электрической энергии
- 4-х квадрантные приводы
- влияние на внешнюю среду
- модернизация приводов постоянного тока
Преимущества постоянного тока
- Главное преимущество электрической энергии постоянного тока – это отсутствие реактивной мощности. А это значит, что вся мощность, выработанная генератором, потребляется нагрузкой за вычетом потерь в проводах.
- Постоянный ток в отличие от переменного протекает по всему сечению проводника.

Указанные два пункта приводят к тому, что если передавать одну и ту же мощность при равных напряжениях постоянным и переменным токами, то потери мощности электроэнергии постоянным током были бы почти в два раза меньше, чем при переменном токе.
К тому же, если рассматривать такие бытовые электронные устройства как ноутбуки, компьютеры, телевизоры и т. п., то все они имеют блоки питания, преобразующие переменное напряжение 220 В (230 В) в постоянное напряжение более низкой величины. А такие преобразования связаны с частичной потерей мощности.
Кроме того, как было сказано ранее, трехфазный асинхронный двигатель (АД) можно подключить напрямую к сети 380 В, что вполне оправдано в том случае, когда не требуется изменять режим работы двигателя. Но если необходимо изменять частоту вращения его вала, то нужно на обмотки статора подавать напряжение, частота и амплитуда которого должны изменяться пропорционально, согласно закону Костенка. Для этого применяют трехфазные автономные инверторы (АИ), чаще всего инверторы напряжения. Такие инверторы должны получать питание от источника постоянного напряжения.
Такие инверторы должны получать питание от источника постоянного напряжения.
Также следует заметить, что последним временем начали очень широко применяться солнечные батареи, которые вырабатывают постоянный ток. К тому же, значительно возросла мощность аккумуляторных батарей и повысилась емкость суперконденсаторов, которые также относятся к источникам постоянного тока и с каждым днем находят все большее практическое применение.
Двигатель переменного тока работа
Из названия следует, что особенностью данного рода электрических двигателей (ЭД) является то, что они работают на переменном токе. Если при постоянном токе электрические частицы следуют только в одном направлении, и могут в определенный момент времени менять свою интенсивность (разность потенциалов или напряжение), то у переменного тока имеются другие характеристики — такие как частота, форма и длительность. Что повлияло на конструкцию и принцип действия электродвигателей переменного тока. В статье разберём основные аспекты работы ЭД переменного тока.
Двигатель переменного тока классификация и принцип работы
Электродвигатели переменного тока это электротехнические устройства, являющиеся своеобразными преобразователями электрической энергии, в основе принципа которых которых лежат электромагнитные силы Лоренца и явление электромагнитной индукции. работающие на переменном токе. ЭД и генераторы переменного тока по принципу действия классифицируют на синхронные и асинхронные. Что бы было понятно дальнейшее объяснение хочу поведать о следующем.
Главной отличительной чертой электрических машин переменного тока является то, что электрическую энергию преобразуют в механическую или наоборот, с помощью взаимодействие магнитных полей, одно из них является вращающимся, динамическим (генерируемое при движении переменного тока, а другое поле в статическое, постоянное. Поэтому, для получения движения ротора движущееся поле должно взаимодействовать с постоянным, что и создает механическое движение вала ЭД.
Общий принцип действия асинхронной электрической машины состоит в следующем. На статоре ЭД намотаны три обмотки, к которым подсоединены три фазы. Из курса электротехники мы знаем, что трехфазный ток это циклическое изменение величины тока и напряжения плавно перетекающее по синусойде. То есть, максимум мощности плавно перетекает из одной точки, обмотки в другую, понятно что, при этом, на противоположной стороне синусойды будет минимум мощности. Так вот при подачи трехфазного напряжения на обмотки статора асинхронного ЭД мы имеем в результате вращающееся магнитное поле, частота которого равна частоте питающей сети, в России это 50 Гц.
На статоре ЭД намотаны три обмотки, к которым подсоединены три фазы. Из курса электротехники мы знаем, что трехфазный ток это циклическое изменение величины тока и напряжения плавно перетекающее по синусойде. То есть, максимум мощности плавно перетекает из одной точки, обмотки в другую, понятно что, при этом, на противоположной стороне синусойды будет минимум мощности. Так вот при подачи трехфазного напряжения на обмотки статора асинхронного ЭД мы имеем в результате вращающееся магнитное поле, частота которого равна частоте питающей сети, в России это 50 Гц.
Из курса физики и общей электротехники мы знаем, что при движении проводника в переменное магнитное поле на его концах генерируется разность потенциалов, а если его концы подсоединить к какой нибудь цепи, то через нее, потечет ток, образующий вокруг себя свое собственное магнитное поле. Вот этот принцип работы и лежит в асинхронных электрических машинах. Внутри нее расположен короткозамкнутый ротор. Во вращающемся магнитном поле на нем появляется ЭДС и у него создается собственное магнитное поле, что и отталкивается от поля статора.
Асинхронный двигатель. Устройство и принцип работы
Работа асинхронного двигателя основана на принципах физического взаимодействия магнитного поля, появляющегося в статоре, с током, который это же поле генерирует в роторной обмотке.
У синхронных ЭД подобного отставания нет. Там поле индуктора как бы цепляется за вращающееся поле якоря, что и ведет к синхронной работе обоих магнитных полей. Если в асинхронниках статическое поле является следствием работы динамического, то в синхронниках в определённом смысле причины появления вращающегося полями и поля статического независимы друг от друга, но их взаимодействие и позволяет осуществлять работу ЭД переменного тока.
Cинхронный двигатель. Принцип работы
Синхронный двигатель – это разновидность электродвигателей, только работающих от переменного напряжения, при этом частота вращения ротора совпадает с частотой вращения магнитного поля. Именно поэтому она остается постоянной вне зависимости от нагрузки, т. к ротор синхронного двигателя – это обычный электромагнит и его, количество пар полюсов совпадает с числом пар полюсов у вращающегося магнитного поля. Поэтому взаимодействие этих полюсов обеспечивает постоянство угловой скорости, с которой крутится ротор.
к ротор синхронного двигателя – это обычный электромагнит и его, количество пар полюсов совпадает с числом пар полюсов у вращающегося магнитного поля. Поэтому взаимодействие этих полюсов обеспечивает постоянство угловой скорости, с которой крутится ротор.
Недостатки постоянного тока
Из выше изложенного следуют такие недостатки.
- Сложность повышения и снижения напряжения, то есть преобразования электроэнергии постоянного тока. В первую очередь это вызвано сложность конструкций преобразователей. Поскольку необходимы мощные полупроводниковые ключи, рассчитанные на высокое напряжение. Отсутствие которых приводит к большому числу последовательно и параллельно соединенных полупроводниковых приборов. В результате снижается надежность всего преобразователя, увеличивается стоимость и возрастают потери мощности.
- Электрические машины имеют более сложную конструкцию, поэтому менее надежны и более затратные, как в производстве, так и в эксплуатации.
- Сложности в развязке высокого и низкого напряжений.

Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец.
 Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
Выводы: постоянный или переменный ток
Несмотря на все преимущества постоянного тока, значительная сложность, вызванная преобразованием больших мощностей, главным образом сказывается сложность повышения и понижения постоянного напряжения, сводит на нет указанные выше преимущества. Поэтому, до тех пор, пока не будут разработаны полупроводниковые ключи огромной мощности и соответствующие преобразователи на их основе, переменный ток остается вне конкуренции. К тому же сейчас уже применяются четырехквадрантные преобразователи или активные выпрямители, позволяющие скомпенсировать реактивную составляющую нагрузки, что позволяет получить коэффициент мощности, равный почти единице. Благодаря чему исключается потребление реактивной мощности.
Благодаря чему исключается потребление реактивной мощности.
Как вы видите, однозначного ответа на вопрос, какой ток лучше: постоянный или переменный, не существует. Следует сравнивать все преимущества и недостатки для конкретного случая.
В чем разница между синхронным и асинхронным двигателем?
Синхронный двигатель — это машина, у которой скорость вращения ротора и скорость магнитного поля статора равны. Асинхронный двигатель – это машина, ротор которой вращается со скоростью меньше синхронной. … Синхронному двигателю требуется дополнительный источник питания постоянного тока для первоначального вращения ротора, близкого к синхронной скорости.
Разница между асинхронным и синхронным двигателем объясняется с помощью различных факторов, таких как тип возбуждения, используемый для машины. СтоимостьСинхронный двигатель дороже, чем асинхронный двигатель той же мощности и номинального напряженияАсинхронный двигатель дешевле, чем синхронный двигатель той же мощности и номинального напряжения. т. е. Ns = 120f/P. Асинхронный двигатель является наиболее широко используемым двигателем во всех бытовых и коммерческих двигателях. Синхронный двигатель всегда работает на синхронной скорости, и скорость двигателя не зависит от нагрузки, но асинхронный двигатель всегда работает на меньшей скорости, чем синхронная. Синхронный двигатель может использоваться для коррекции коэффициента мощности в дополнение к передаче крутящего момента для привода механических нагрузок, тогда как асинхронный двигатель используется только для привода механических нагрузок. Синхронный двигатель более эффективен, чем асинхронный двигатель той же мощности и номинального напряжения. Синхронный двигатель дороже, чем асинхронный двигатель той же мощности и номинального напряжения.
СтоимостьСинхронный двигатель дороже, чем асинхронный двигатель той же мощности и номинального напряженияАсинхронный двигатель дешевле, чем синхронный двигатель той же мощности и номинального напряжения. т. е. Ns = 120f/P. Асинхронный двигатель является наиболее широко используемым двигателем во всех бытовых и коммерческих двигателях. Синхронный двигатель всегда работает на синхронной скорости, и скорость двигателя не зависит от нагрузки, но асинхронный двигатель всегда работает на меньшей скорости, чем синхронная. Синхронный двигатель может использоваться для коррекции коэффициента мощности в дополнение к передаче крутящего момента для привода механических нагрузок, тогда как асинхронный двигатель используется только для привода механических нагрузок. Синхронный двигатель более эффективен, чем асинхронный двигатель той же мощности и номинального напряжения. Синхронный двигатель дороже, чем асинхронный двигатель той же мощности и номинального напряжения.
В чем разница между асинхронным двигателем и обычным двигателем? Разница между трехфазным асинхронным двигателем и синхронным двигателем. … Обмотка статора асинхронного двигателя питается от источника переменного тока. Синхронный двигатель всегда работает на синхронной скорости, и скорость двигателя не зависит от нагрузки, но асинхронный двигатель всегда работает на меньшей скорости, чем синхронная.
… Обмотка статора асинхронного двигателя питается от источника переменного тока. Синхронный двигатель всегда работает на синхронной скорости, и скорость двигателя не зависит от нагрузки, но асинхронный двигатель всегда работает на меньшей скорости, чем синхронная.
Что такое синхронный и асинхронный процесс? Рабочий процесс может быть синхронным или асинхронным. Синхронный процесс — это процесс, который может выполняться без перерыва от начала до конца. … Асинхронный процесс — это процесс, который Workflow Engine не может завершить немедленно, поскольку он содержит действия, которые прерывают поток.
Что такое асинхронный электродвигатель? Асинхронный двигатель или асинхронный двигатель представляет собой электродвигатель переменного тока, в котором электрический ток в роторе, необходимый для создания крутящего момента, получается за счет электромагнитной индукции от магнитного поля обмотки статора. Таким образом, асинхронный двигатель может быть изготовлен без электрических соединений с ротором.
Как узнать, асинхронный двигатель или синхронный? Синхронный двигатель может работать только на синхронной скорости. Короче говоря, крутящий момент в асинхронном двигателе создается за счет относительной скорости, тогда как в синхронном двигателе создание крутящего момента происходит из-за углового отставания между двумя полями.
В чем разница между синхронным и асинхронным двигателем?
Трехфазный синхронный двигатель представляет собой машину с двойным возбуждением, тогда как асинхронный двигатель представляет собой машину с одним возбуждением. Обмотка якоря синхронного двигателя питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока. Обмотка статора асинхронного двигателя питается от источника переменного тока.
Является ли синхронный двигатель асинхронным двигателем?
Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети. … Соответственно, чем больше полюсов, тем медленнее крутится синхронный двигатель.
Магнитное поле статора вращается синхронно с частотой сети. … Соответственно, чем больше полюсов, тем медленнее крутится синхронный двигатель.
В чем разница между синхронным и асинхронным двигателем?
Синхронный двигатель — это машина, у которой скорость вращения ротора и скорость магнитного поля статора равны. Асинхронный двигатель – это машина, ротор которой вращается со скоростью меньше синхронной. … Синхронному двигателю требуется дополнительный источник питания постоянного тока для первоначального вращения ротора, близкого к синхронной скорости.
Что означает трехфазный двигатель?
Трехфазные двигатели — это двигатели, предназначенные для работы от трехфазного переменного тока (AC), используемого во многих промышленных приложениях. … Трехфазный переменный ток имеет три источника питания переменного тока, все они не совпадают по фазе друг с другом. Это означает, что никакие две волны переменного тока никогда не находятся в одной и той же точке в одно и то же время.
В чем разница между синхронным и асинхронным?
Синхронный = происходит одновременно. Асинхронный = не происходит одновременно. При синхронном обучении участники могут получать немедленную обратную связь. При асинхронном обучении участники могут учиться в своем собственном темпе.
Что такое трехфазный асинхронный двигатель?
Трехфазные асинхронные двигатели состоят из двух основных компонентов: статора и ротора. Статор – неподвижная часть двигателя. … Ротор – это вращающаяся часть двигателя. В роторах асинхронных двигателей с контактными кольцами имеется обмотка, а в роторе асинхронных двигателей с короткозамкнутым ротором — короткозамкнутые стержни.
Чем отличается асинхронный двигатель от синхронного?
Трехфазный синхронный двигатель представляет собой машину с двойным возбуждением, тогда как асинхронный двигатель представляет собой машину с одним возбуждением. Обмотка якоря синхронного двигателя питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока. Обмотка статора асинхронного двигателя питается от источника переменного тока.
Обмотка статора асинхронного двигателя питается от источника переменного тока.
Что понимают под асинхронным двигателем?
Асинхронный двигатель или асинхронный двигатель представляет собой электродвигатель переменного тока, в котором электрический ток в роторе, необходимый для создания крутящего момента, получается за счет электромагнитной индукции от магнитного поля обмотки статора. Таким образом, асинхронный двигатель может быть изготовлен без электрических соединений с ротором.
Как узнать, является ли двигатель синхронным?
Чем отличаются синхронные и асинхронные двигатели?
Синхронный двигатель — это машина, у которой скорость вращения ротора и скорость магнитного поля статора равны. Асинхронный двигатель – это машина, ротор которой вращается со скоростью меньше синхронной. … Синхронному двигателю требуется дополнительный источник питания постоянного тока для первоначального вращения ротора, близкого к синхронной скорости.
Что такое синхронный и асинхронный?
Асинхронное обучение
Асинхронное обучение — это общий термин, используемый для описания форм образования, обучения и обучения, которые не происходят в одном и том же месте или в одно и то же время. Он использует ресурсы, которые облегчают обмен информацией вне ограничений времени и места среди сети людей.
Он использует ресурсы, которые облегчают обмен информацией вне ограничений времени и места среди сети людей.
Википедия
В чем разница синхронного и асинхронного?
Синхронный = происходит одновременно. Асинхронный = не происходит одновременно. При синхронном обучении участники могут получать немедленную обратную связь. При асинхронном обучении участники могут учиться в своем собственном темпе.
Являются ли синхронные двигатели асинхронными?
Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети. … Соответственно, чем больше полюсов, тем медленнее крутится синхронный двигатель.
Как определить, является ли двигатель асинхронным?
Как определить, является ли двигатель асинхронным?
Как узнать, является ли двигатель асинхронным?
Асинхронный двигатель работает только с отстающим коэффициентом мощности. Ротор асинхронного двигателя не требует тока. Скорость двигателя не зависит от изменения нагрузки. Это постоянно.
Ротор асинхронного двигателя не требует тока. Скорость двигателя не зависит от изменения нагрузки. Это постоянно.
В чем разница между синхронным и асинхронным двигателем?
Синхронный двигатель — это машина, у которой скорость вращения ротора и скорость магнитного поля статора равны. Асинхронный двигатель – это машина, ротор которой вращается со скоростью меньше синхронной. … Синхронному двигателю требуется дополнительный источник питания постоянного тока для первоначального вращения ротора, близкого к синхронной скорости.
Асинхронные двигатели | Электротехника и электрооборудование
Страница 5 из 39
РАЗДЕЛ ВТОРОЙ
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Электрические машины, действия которых основаны на электромагнитных явлениях и которые служат для преобразования механической энергии в электрическую, называют электромашинный и генераторами, а преобразующие электрическую энергию в механическую — электродвигателями. Применяют также электрические машины для преобразования электрической энергии одних параметров в другие, которые называют преобразователями. Преобразовываться могут: род тока, частота, напряжение, число фаз и другие параметры электроэнергии.
Преобразовываться могут: род тока, частота, напряжение, число фаз и другие параметры электроэнергии.
Электрические генераторы приводятся во вращение паровыми и водяными турбинами, двигателями внутреннего сгорания и др. Электродвигатели служат для приведения в действие станков, различных машин, транспортного оборудования и др. К электрическим машинам часто относят также трансформаторы — статические аппараты, не имеющие движущихся частей, но по своему устройству и принципу действия имеющие много общего с электрическими машинами. Электрические машины обладают свойством обратимости, т. е. могут работать генератором, если их вращать каким-либо двигателем или если к ним подводить электроэнергию, могут использоваться как электродвигатели. Однако при проектировании электромашин учитывают требования, предъявляемые особенностями их работы генератором или электродвигателем. Электрические машины подразделяются на машины переменного тока и машины постоянного тока. Электрические машины переменного тока разделяют на синхронные, асинхронные и коллекторные. Наибольшее применение имеют синхронные генераторы переменного трехфазного тока и трехфазные асинхронные электродвигатели. Коллекторные электродвигатели переменного тока имеют ограниченное применение вследствие сложности устройства, обслуживания и более высокой стоимости. Основным их преимуществом является возможность регулирования скорости вращения в широких пределах, что затруднительно в асинхронных двигателях. Электрические машины постоянного тока представляют собой сочетание машин переменного тока с механическим выпрямителем- коллектором, являющимся неотъемлемой частью этих машин. С помощью коллектора переменный ток преобразуется в постоянный ток. Электрические машины постоянного тока имеют ограниченную область применения вследствие более высокой стоимости этих машин и их эксплуатации по сравнению с машинами переменного тока.
Наибольшее применение имеют синхронные генераторы переменного трехфазного тока и трехфазные асинхронные электродвигатели. Коллекторные электродвигатели переменного тока имеют ограниченное применение вследствие сложности устройства, обслуживания и более высокой стоимости. Основным их преимуществом является возможность регулирования скорости вращения в широких пределах, что затруднительно в асинхронных двигателях. Электрические машины постоянного тока представляют собой сочетание машин переменного тока с механическим выпрямителем- коллектором, являющимся неотъемлемой частью этих машин. С помощью коллектора переменный ток преобразуется в постоянный ток. Электрические машины постоянного тока имеют ограниченную область применения вследствие более высокой стоимости этих машин и их эксплуатации по сравнению с машинами переменного тока.
ГЛАВА СЕДЬМАЯ
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА
АСИНХРОННЫЕ ДВИГАТЕЛИ
Асинхронные электродвигатели переменного тока были изобретены и впервые применены русским инженером М. О. Доливо-Добровольским в 1889 г. Асинхронные электродвигатели переменного трехфазного тока вследствие простоты устройства и эксплуатации, надежности действия и низкой стоимости по сравнению с электродвигателями других конструкций, получили самое широкое применение во всех отраслях народного хозяйства, в том числе и для привода строительных машин и механизмов. Питание электродвигателей переменного тока производят через трансформаторы непосредственно от районных электросетей, что уменьшает потери электроэнергии, имеющейся при применении двигателей постоянного тока. В последнем случае помимо трансформации высокого напряжения переменного тока применяется его преобразование в постоянный ток, связанное с дополнительными потерями электроэнергии.
О. Доливо-Добровольским в 1889 г. Асинхронные электродвигатели переменного трехфазного тока вследствие простоты устройства и эксплуатации, надежности действия и низкой стоимости по сравнению с электродвигателями других конструкций, получили самое широкое применение во всех отраслях народного хозяйства, в том числе и для привода строительных машин и механизмов. Питание электродвигателей переменного тока производят через трансформаторы непосредственно от районных электросетей, что уменьшает потери электроэнергии, имеющейся при применении двигателей постоянного тока. В последнем случае помимо трансформации высокого напряжения переменного тока применяется его преобразование в постоянный ток, связанное с дополнительными потерями электроэнергии.
Асинхронные электромашины, присоединенные к электросети, как и все электрические машины, обладают свойством обратимости, т. е. могут работать как двигатели и как генераторы.
В первом случае электроэнергия, получаемая из сети, расходуется на приведение электродвигателя во вращение, во втором случае вращение ротора асинхронной машины с помощью механического двигателя (внутреннего сгорания или парового) с определенной скоростью приводит к получению электроэнергии, передаваемой в электросеть.
Примером работы асинхронной машины в качестве электродвигателя и электрогенератора может быть подъемный кран. При подъеме груза машина работает как электродвигатель, потребляя электроэнергию из сети. Эта же машина может при известных условиях работать генератором, если под весом опускаемого груза ее ротор будет вращаться со скоростью, превышающей определенную величину. В последнем случае энергия будет передаваться в электросеть (рекуперация энергии).
§ 7.1. Принцип действия асинхронного электродвигателя
Принцип действия трехфазного асинхронного электродвигателя основан на явлении вращающегося магнитного поля, описанном в гл. 5.
Вращающееся магнитное поле может быть двухполюсным, четырехполюсным, шестиполюсным и т. д.
Скорость вращения поля определяется соотношением
(7.1)
где η — скорость вращения поля, об/мин;
f — частота трехфазного тока;
р — число пар полюсов,
В асинхронном электродвигателе катушки из провода, необходимые для получения вращающегося магнитного поля, размещаются на неподвижной части двигателя — его статоре. В качестве примера на рис. 7.1 схематически показано размещение шести катушек на статоре асинхронного электродвигателя.
В качестве примера на рис. 7.1 схематически показано размещение шести катушек на статоре асинхронного электродвигателя.
Принцип действия асинхронного двигателя состоит в следующем. Во вращающееся двухполюсное магнитное поле помещен один или несколько замкнутых витков (рис. 7.2).
Рис. 7.1. Схема расположения шести катушек на статоре асинхронного электродвигателя
Рис. 7.2. Принцип действия асинхронного электродвигателя
На рисунке вращающееся поле условно изображено в виде двух полюсов электромагнита, вращающегося по часовой стрелке. Магнитные силовые линии при вращении поля пересекают виток и по известному нам закону электромагнитной индукции наводят в нем э. д. с. Если замкнуть виток, в нем под действием э. д. с. будет протекать электрический ток.
Направление тока в проводах витка, определяемое по правилу правой руки*, показано на рисунке крестиком и точкой. Магнитный поток, создаваемый током вокруг витка, будет взаимодействовать с вращающимся магнитным полем статора и в результате этого взаимодействия проводник будет двигаться. Направление механических сил, действующих на проводники, составляющие виток, определяется по правилу левой руки. На рисунке эти силы показаны стрелками. Из рисунка видно, что под действием указанных сил виток будет вращаться в ту же сторону, в какую вращается магнитное поле. Скорость вращения витка оказывается близкой к скорости вращения магнитного поля, но не равной ей (несколько меньшей).
Направление механических сил, действующих на проводники, составляющие виток, определяется по правилу левой руки. На рисунке эти силы показаны стрелками. Из рисунка видно, что под действием указанных сил виток будет вращаться в ту же сторону, в какую вращается магнитное поле. Скорость вращения витка оказывается близкой к скорости вращения магнитного поля, но не равной ей (несколько меньшей).
Таков принцип действия асинхронного электродвигателя. Двигатель называется асинхронным потому, что его ротор вращается не синхронно с вращающимся магнитным полем, т. е. несколько отстает от него. Ни при каких условиях синхронного вращения ротора быть не может, так как в этом случае магнитные силовые линии поля не будут пересекать проводники ротора, а следовательно, в них не будет протекать ток, на взаимодействии которого с вращающимся магнитным полем основана работа электродвигателя.
§ 7.2. Конструктивное устройство асинхронных электродвигателей
Асинхронный электродвигатель состоит из следующих основных частей: неподвижной части — статора, вращающейся части — ротора и двух подшипниковых щитов, в которые помещают концы вала ротора (рис. 7.3).
7.3).
Короткозамкнутый ротор с обмоткой в виде беличьего колеса показан на рис. 7.3. Медные стержни «беличьего колеса» закладываются в пазы ротора и накоротко замыкаются двумя медными торцевыми кольцами (7.3, а).
* Пользуясь в данном случае правилом правой руки, следует учесть, что направление движении проводника относительно линий магнитного поля будет обратно направлению вращения поля, т. е. будет направлено против часовой стрелки.
Рис 7.3. Электродвигатель с короткозамкнутым ротором:
а — беличье колесо ротора; б — короткозамкнутый ротор; в — общий вид
Рис. 7.4. Стальной лист статора
Часто «беличье колесо» ротора выполняется из алюминия, путем заливки пазов ротора расплавленным алюминием (7.3, б).
В чугунный или алюминиевый корпус статора запрессовывается кольцеобразный сердечник, собранный из стальных листов (рис. 7.4), толщиной 0,5 мм, изолированных друг от друга слоем лака или тонкими листами бумаги. Из таких же стальных штампованных листов собирают ротор. Сердечники служат магнитопроводом для магнитного потока, создаваемого обмоткой статора и ротора, которая размещается в пазах, выштампованных в сердечниках. Устройство сердечников из тонких стальных листов приводит к уменьшению вихревых токов, образуемых в них при пересечении магнитными потоками.
Сердечники служат магнитопроводом для магнитного потока, создаваемого обмоткой статора и ротора, которая размещается в пазах, выштампованных в сердечниках. Устройство сердечников из тонких стальных листов приводит к уменьшению вихревых токов, образуемых в них при пересечении магнитными потоками.
Обмотка статора выполняется в виде катушек из изолированного провода, заранее заготовленных и уложенных в пазы.
Шесть концов трехфазной обмотки статора выводятся наружу и крепятся к контактным зажимам специального щитка на корпусе электродвигателя или снабжаются маркированными наконечниками.
Рис. 7.5. Щитки с зажимами асинхронного двигателя
Рис. 7.6. Электродвигатель с фазным ротором:
а — ротор с контактными кольцами; б — общий вид
Выведенные концы дают возможность соединить обмотку статора и в звезду и в треугольник. При наличии щитка концы фаз подводятся к его зажимам (для удобства пересоединения обмотки) по схеме, указанной на рис. 7.5. Пересоединяя металлические планочки, имеющиеся на щитке, в одном случае получается соединение обмотки в треугольник, в другом — в звезду. При конструкциях электродвигателя без выводного щитка соединение обмотки в звезду или в треугольник достигается соответственным соединением ее выведенных маркированных концов.
При конструкциях электродвигателя без выводного щитка соединение обмотки в звезду или в треугольник достигается соответственным соединением ее выведенных маркированных концов.
Рис. 7.8. Схема включения асинхронного- двигателя с контактными кольцами:
1 — обмотка статора; 2 — обмотка ротора; 3 — контактные кольца; 4 — щетки; 5 — реостат
Рис. 7.7. Пружинный щеткодержатель: а—общий вид; б —щетка
Пересоединение обмотки статора позволяет использовать один и тот же электродвигатель при двух напряжениях. Так, например, если электродвигатель рассчитан на работу при соединении обмоток статора в звезду под напряжением 380 В, то он может развивать ту же мощность и при тех же оборотах под напряжением 220 В при соединении обмоток статора в треугольник. Обмотки роторов асинхронных электродвигателей небольшой мощности выполняют короткозамкнутыми, а средней и большой мощности с трехфазной обмоткой из изолированных проводов так же, как и обмотка статора. На рис. 7. 6 показан электродвигатель с фазным ротором, трехфазные обмотки которого выполнены из изолированного провода. Обмотка уложена в пазы ротора так, что концы их соединены в звезду на самом роторе, а начала проводов присоединяются к трем контактным кольцам, насаженным на вал ротора и изолированным от вала и друг от друга. Ротор с контактными кольцами, называемый также фазным ротором, позволяет включать в свою цепь добавочное сопротивление реостата при пуске электродвигателя или для регулирования его оборотов. Обмотка ротора соединяется с кольцами изолированным проводом, пропущенным через отверстие, высверленное в валу. По кольцам скользят щетки, через которые обмотка ротора соединяется с реостатом. Щетки изготовляют из угля или смеси угля с графитом. Для машин с контактными кольцами применяются также щетки с содержанием меди или бронзы. На рис. 7.7 показан пружинный щеткодержатель со щеткой и часть контактного кольца. Схема включения асинхронного двигателя с фазным ротором (с контактными кольцами) представлена на рис.
6 показан электродвигатель с фазным ротором, трехфазные обмотки которого выполнены из изолированного провода. Обмотка уложена в пазы ротора так, что концы их соединены в звезду на самом роторе, а начала проводов присоединяются к трем контактным кольцам, насаженным на вал ротора и изолированным от вала и друг от друга. Ротор с контактными кольцами, называемый также фазным ротором, позволяет включать в свою цепь добавочное сопротивление реостата при пуске электродвигателя или для регулирования его оборотов. Обмотка ротора соединяется с кольцами изолированным проводом, пропущенным через отверстие, высверленное в валу. По кольцам скользят щетки, через которые обмотка ротора соединяется с реостатом. Щетки изготовляют из угля или смеси угля с графитом. Для машин с контактными кольцами применяются также щетки с содержанием меди или бронзы. На рис. 7.7 показан пружинный щеткодержатель со щеткой и часть контактного кольца. Схема включения асинхронного двигателя с фазным ротором (с контактными кольцами) представлена на рис. 7.8.
7.8.
§ 7.3. Синхронная скорость вращения и скольжения
При включении асинхронного двигателя в сеть по обмоткам статора начинает протекать ток, создающий вращающийся магнитный поток. Скорость вращения этого потока % определяется формулой, приведенной в § 7.1, и называется синхронной. Вслед за вращающимся магнитным потоком начинает вращаться ротор со скоростью n2< n1.
Отношение
(7.2)
называется скольжением, так как показывает, насколько скорость вращения ротора отстает от вращающегося магнитного поля.
В момент включения электродвигателя, когда его ротор еще не стронулся с места, n2 = 0 и s = 1. Если предположить, что ротор вращается со скоростью магнитного поля, то п2 = щ и s = 0. Таким образом, теоретически скольжение меняется от 0 до 1 и от 0 до 100%. При увеличении нагрузки на валу электродвигателя, т. е. тормозного момента, скольжение ротора возрастает потому, что только при этом будет увеличиваться э. д. с. в обмотке ротора и ток, обусловливающий вращающий момент. В зависимости от номинальной мощности и типов электродвигателей при полной нагрузке скольжение обычно колеблется в пределах от 2 до 8%. У выпускаемых промышленностью электродвигателей повышенного скольжения при полной нагрузке скольжение составляет 8—12%.
В зависимости от номинальной мощности и типов электродвигателей при полной нагрузке скольжение обычно колеблется в пределах от 2 до 8%. У выпускаемых промышленностью электродвигателей повышенного скольжения при полной нагрузке скольжение составляет 8—12%.
§ 7.6. Механическая характеристика асинхронного электродвигателя
Для электропривода машин, в том числе и строительных, большое значение имеют механические характеристики электродвигателей.
Механической характеристикой называют зависимость скорости вращения электродвигателя от нагрузки на его валу, т. е. п = f (М), или s = f (М), где п — скорость вращения, s — величина скольжения, М — момент вращения, развиваемый двигателем.
Рис. 7.10. Механическая характеристика асинхронного двигателя с короткозамкнутым ротором:
Рис. 7.11. Механические характеристики асинхронного электродвигателя с фазным ротором:
1 — естественная характеристика; 2 и 3 — искусственные характеристики
Механические характеристики подразделяются на естественные и и с к у с с т в е н н ы е. Естественной называют такую характеристику электродвигателя, которая образуется без какого-либо изменения схемы его включения (т. е. без введения дополнительного сопротивления в его цепи или изменения величины подводимого напряжения и др.). Искусственными же называют характеристики, получаемые изменением указанных выше величин (дополнительных сопротивлений, величины подводимого напряжения и т. д.).
Естественной называют такую характеристику электродвигателя, которая образуется без какого-либо изменения схемы его включения (т. е. без введения дополнительного сопротивления в его цепи или изменения величины подводимого напряжения и др.). Искусственными же называют характеристики, получаемые изменением указанных выше величин (дополнительных сопротивлений, величины подводимого напряжения и т. д.).
На рис. 7.10 приведены механические характеристики асинхронных электродвигателей. На рис. 7.10 показана естественная характеристика двигателя с короткозамкнутым ротором. На участке кривой характеристики а — б — в, соответствующей устойчивой работе двигателя при увеличении вращающего момента от нуля до максимального его значения, скорость вращения уменьшается незначительно. Такая ме ханическая характеристика называется жесткой. Итак, асинхронный двигатель с короткозамкнутым ротором обладает жесткой механической характеристикой.
На рис. 7.11 показаны механические характеристики асинхронного двигателя с фазным ротором. Кривая 1 — естественная характеристика этого двигателя аналогична рассмотренной выше характеристике двигателя с короткозамкнутым ротором. Остальные кривые 2 и 3 представляют собой искусственные (так называемые — реостатные) механические характеристики того же двигателя, получаемые введением в цепь ротора дополнительных сопротивлений: RY и /?2, причем /?2 > Rx. Как видно из рисунка, искусственные характеристики изменяют характер зависимости п = f (М): при увеличении момента М скорость вращения п значительно уменьшается и тем скорее, чем больше дополнительное сопротивление, вводимое в цепь ротора. Такого рода характеристики называются мягкими. Итак, у асинхронного электродвигателя с фазным ротором есть жесткая естественная механическая характеристика и мягкие искусственные механические характеристики, получаемые при введении в цепь ротора дополнительных сопротивлений: при одном и том же значении М скольжение s, а следовательно, и скорость вращения п могут быть различными. Это свойство двигателя используется в качестве одного из способов регулирования числа оборотов асинхронных двигателей (см.
Кривая 1 — естественная характеристика этого двигателя аналогична рассмотренной выше характеристике двигателя с короткозамкнутым ротором. Остальные кривые 2 и 3 представляют собой искусственные (так называемые — реостатные) механические характеристики того же двигателя, получаемые введением в цепь ротора дополнительных сопротивлений: RY и /?2, причем /?2 > Rx. Как видно из рисунка, искусственные характеристики изменяют характер зависимости п = f (М): при увеличении момента М скорость вращения п значительно уменьшается и тем скорее, чем больше дополнительное сопротивление, вводимое в цепь ротора. Такого рода характеристики называются мягкими. Итак, у асинхронного электродвигателя с фазным ротором есть жесткая естественная механическая характеристика и мягкие искусственные механические характеристики, получаемые при введении в цепь ротора дополнительных сопротивлений: при одном и том же значении М скольжение s, а следовательно, и скорость вращения п могут быть различными. Это свойство двигателя используется в качестве одного из способов регулирования числа оборотов асинхронных двигателей (см. следующий параграф).
следующий параграф).
- Назад
- Вперёд
Відмінності асинхронних двигунів від синхронних
Застосування електродвигунів в різних галузях промисловості і побуту широко поширена у зв’язку з економічністю і простотою підключення та обслуговування. Для різних механізмів, що застосовуються двигуни різної потужності і пристрої. У цій статті розглянемо, чим відрізняється синхронний двигун від асинхронного, в яких механізмах вони застосовуються і як правильно вибрати тип електричного мотора.
Асинхронні двигуни
Як і будь-які електричні двигуни асинхронні двигуни являють собою пристрої, які створюють крутний момент за допомогою перетворення електричного струму. Якщо говорити простими словами, асинхронний двигун – це електромотор з неравнозначной частотою обертання ротора і магнітного поля. Магнітне поле ротора в таких пристроях завжди обертається з меншою частотою, ніж поле статора.
Будова асинхронного двигуна в цілому аналогічно з синхронним. Він складається з:
Він складається з:
- Циліндричного статора з металевих пластин з пазами для обмотки;
- Фазного або короткозамкненого ротора;
- Рухомих і нерухомих деталей корпусу, таких як вал, підшипники, вентилятор охолодження, електричного обладнання.
Використовується тип двигуна асинхронний у різних приводах як у промисловості, так і в побуті. Наприклад, для забезпечення роботи конвеєрів, підйомних механізмів, кранів і екскаваторів, деревообробних верстатів та інших механізмів, як великогабаритних, так і невеликих побутових.
Обслуговування та ремонт такого типу електромоторів не вимагає великих витрат, проте, для трансформації обертального моменту і зниження частоти обертання необхідно використовувати редуктора різної складності, часто з великим передавальним числом.
Синхронні двигуни
Основна відмінність синхронного двигуна від асинхронного в тому, що частота обертання магнітних полів при його роботі збігається, тобто є синхронною. Для синхронізації частот обертання використовується додаткове джерело постійного живлення, що робить конструкцію синхронного електродвигуна складніше і частково обмежує сферу застосування такого виду машин. Крім того, робота такого типу двигуна можлива тільки з використанням частотного перетворювача.
Крім того, робота такого типу двигуна можлива тільки з використанням частотного перетворювача.
У сфері застосування, електродвигуни синхронні – це промислові двигуни великої потужності, які використовуються в різних промислових пристроях, устаткуванні, де необхідна підвищена потужність і виникають перевантаження.
Важливою особливістю такого типу електромоторів є те, що при роботі із перевантаженням пристрій віддає частину реактивної потужності в мережу, що сприяє підвищенню потужності, компенсує падіння потужності.
Синхронні двигуни бувають також таких типів:
- Гістерезисні двигуни використовуються в точних механізмах для створення обертання. Наприклад, у звукозапису, медичному обладнанні, машинобудуванні
- Крокові електродвигуни застосовуються в точних приладах і механізмах, таких як, наприклад, верстати з числовим програмним забезпеченням.
Переваги і недоліки синхронних і асинхронних електродвигунів
Що б визначити, який двигун краще синхронний або асинхронний, необхідно розглянути сферу застосування цих пристроїв.
Асинхронні двигуни дешевше у виробництві і не вимагають додаткового живлення і пристрої для запуску, на відміну від синхронних, тому їх використання більш поширене. Крім того, підключення і обслуговування таких двигунів також коштує дешевше, як і їх виробництво.
Синхронні двигуни, крім підвищеної потужності, володіють ще однією важливою перевагою – можливістю генерації низької частоти обертання без використання додаткових передач в редукторах. При цьому, потужність на вихідному валу залишається незмінною. Синхронний двигун має підвищений коефіцієнт корисної дії, більш повно трансформуючи електричну енергію в крутний момент.
Однак, синхронні двигуни мають і недоліки. Крім того, що потрібне додаткове харчування і обладнання запуску, в такому типі електродвигунів відбувається швидкий знос рухомих струмознімальних деталей, таких як щітки і контактні кільця. Для заміни зношеного обладнання потрібні кошти, що ще більше збільшує вартість використання синхронних двигунів.
Крім того, налагодження та обслуговування синхронних двигунів має ряд особливостей і потребує більш глибоких знань технічних особливостей.
Який тип двигуна вибрати
При выборе типа электрического двигателя следует учитывать такие факторы:
- Сферу применения и оборудование, которое приводится в движение электродвигателем;
- Стоимость оборудования и его обслуживания;
- Тип преобразующего редуктора, применяемого для понижения скорости вращения;
- Тип питания и электрической сети.
Учитывая эти факторы и принимая во внимание расчет механизма, можно подобрать тип двигателя, который будет обеспечивать бесперебойную работу устройства, максимально экономить электроэнергию и обеспечивать необходимую мощность.
При використанні будь-якого виду електричних двигунів варто пам’ятати, що термін їх служби залежить від дотримання технічного регламенту при підключенні, налагодження та подальшого обслуговування такого обладнання. При порушенні технічних вимог електродвигун вийде з ладу, незважаючи на його переваги і надійність.
Чем отличается синхронный двигатель от асинхронного
Для того чтобы заставить электричество совершать полезную работу, электрическую энергию необходимо преобразовать в механическую.
Для этого в промышленных электрических сетях переменного тока применяются электродвигатели двух типов — асинхронные (АД) и синхронные (СД).
Машины обоих типов имеют схожие конструктивные черты:
- оба типа машин состоят из неподвижного статора и вращающегося ротора;
- основу статора электродвигателей обоих типов составляет электромагнитная система (стальной сердечник с обмотками), заключённая в корпус из немагнитного материала;
- обмотки статора, подключенные к промышленной электросети, создают электромагнитное поле с круговым периодическим изменением вектора напряжённости.
Примечание.
Применительно к синхронному статор чаще именуется якорем, а ротор — индуктором. Между этими понятиями существует смысловая разница.
Определения статор и ротор применяются соответственно к неподвижной и подвижной части машины. Наименования якорь и индуктор имеют функциональное значение и применяются к машинам постоянного тока и синхронным.
В ГОСТ 27471-87 якорь определён как часть электродвигателя, в обмотке которой протекает ток нагрузки, а индуктор как ротор или статор синхронной машины с обмоткой возбуждения или постоянным магнитом.
То есть в общем случае, как статор, так и ротор могут быть и якорем и индуктором. Но поскольку исполнение синхронного со статором – индуктором и ротором – якорем можно отнести к исключениям, такие редкие конструкции в описаниях обычно не рассматривают.
КОНСТРУКТИВНЫЕ ОТЛИЧИЯ АСИНХРОННОГО И СИНХРОННОГО ДВИГАТЕЛЕЙ
Основные различия заключаются в конструкции роторных обмоток и принципе возникновения вращающего момента.
Асинхронный двигатель.
Роторная обмотка АД может быть замкнутой накоротко («беличья клетка»), либо через подключаемые дополнительные сопротивления, находящиеся вне двигателя.
Первый тип называют «электродвигателем с короткозамкнутым ротором», второй — «с фазным ротором». Дополнительные сопротивления в фазной роторной обмотке служат для облегчения запуска, по завершении которого шунтируются.
Блок сопротивлений соединяется с обмоткой фазного ротора скользящими контактами коллекторного механизма. Асинхронный двигатель с «беличьей клеткой» не имеет коллектора.
При подаче напряжения на обмотку статора, создаётся круговое магнитное поле, вращение которого вызывает появление ЭДС индукции и соответственно, ток в стержнях «беличьей клетки».
По закону Ампера на каждый стержень с током в магнитном поле статора действует сила, направленная перпендикулярно стержню, то есть, по касательной к поверхности ротора, которая и создаёт вращающий момент.
ЭДС индукции и ток в обмотке ротора возникают только при различии частоты, с которой вращается вал двигателя и магнитное поле статора.
Поэтому в асинхронном двигателе частота вращения поля всегда больше частоты вращения вала двигателя. Отсюда и название — асинхронный двигатель.
Синхронный двиратель.
На индукторе синхронного двигателя переменного тока располагается обмотка возбуждения, которая питается от стороннего источника постоянного тока через коллекторный механизм.
Для облегчения запуска электродвигателя на его роторе также располагается короткозамкнутая «беличья клетка», которую называют демпферной обмоткой.
Круговое поле статора вызывает появление силы Ампера, действующей на обмотку возбуждения. Но поскольку ток возбуждения СД не зависит от магнитного поля статора, а создаётся внешним источником, его индуктор раскручивается до частоты вращения поля. Поэтому двигатель называется синхронным.
Пуск производится с помощью демпферной обмотки в асинхронном режиме, обмотка возбуждения при этом отключена. Когда частота вращения достигает асинхронной, подаётся ток возбуждения и частота возрастает до синхронной величины.
РАЗНИЦА В ПРИМЕНЕНИИ
Синхронные двигатели в отличии от асинхронных имеют более сложную конструкцию и высокую цену, но обладают улучшенными эксплуатационными характеристиками:
- частота вращения более стабильна и не имеет ярко выраженной зависимости от нагрузки на валу и уровня сетевого напряжения;
- более высокая перегрузочная способность;
- двигатели с автоматическим регулированием тока возбуждения способны поддерживать оптимальное напряжение в сети.

Асинхронные потребляют наряду с активной большой объём реактивной энергии, которая транспортируется по линиям вместе с активной составляющей, увеличивая потери.
В крупных узлах потребления это приводит к дефициту реактивной мощности и значительной посадке напряжения. В этом случае используют батареи конденсаторов или синхронные компенсаторы, вырабатывающие реактивную мощность.
Применение СД вместо АД решает эту проблему, так как синхронные двигатели могут работать в широком диапазоне значений cos φ, не только не потребляя реактивную мощность, но и отдавая её в электрическую сеть.
* * *
© 2014-2022 г.г. Все права защищены.
Материалы сайта имеют ознакомительный характер, могут выражать мнение автора и не подлежат использованию в качестве руководящих и нормативных документов.
Синхронные двигатели | Эксплуатация электрических машин и аппаратуры | Архивы
6кВ
0,4кВ
трансформатор
эксплуатация
подстанция
10кВ
заземление
Содержание материала
Эксплуатация электрических машин и аппаратуры
Волокнистые, стеклянные и асбестовые материалы, бумага
Проводниковые материалы
Сведения об электрических машинах переменного тока
Однослойные трехфазные обмотки машин переменного тока
Трехфазные двухслойные обмотки машин переменного тока
Обмотки однофазных машин переменного тока
Асинхронные двигатели
Принцип работы асинхронного двигателя
Пуск трехфазных асинхронных двигателей
Регулировка скорости вращения асинхронных двигателей
Однофазные асинхронные двигатели
Синхронные машины
Принцип работы синхронного генератора
Характеристики синхронных генераторов
Синхронные двигатели
Трансформаторы
Работа трансформаторов
Трехфазные трансформаторы
Специальные трансформаторы
Другие специальные трансформаторы
Машины постоянного тока
Генераторы постоянного тока
Двигатели постоянного тока
Сварочные генераторы
Рубильники и пакетные выключатели
Контакторы и магнитные пускатели
Реостаты
Предохранители
Работа трехфазных асинхронных двигателей в однофазных сетях
Изменение скорости вращения ротора асинхронного двигателя
Особые режимы работы трехфазного асинхронного двигателя
Параллельная работа трансформаторов
Параллельная работа синхронных генераторов
Система технического обслуживания электрооборудования
Условия эксплуатации и выбор электрооборудования
Хранение, транспортировка и монтаж электрооборудования
Техническое обслуживание асинхронных двигателей
Проверка сети при пуске асинхронных двигателей
Эксплуатационные характеристики асинхронного двигателя
Дефектовка собранного асинхронного двигателя
Техническое обслуживание генераторов
Техническое обслуживание трансформаторов
Аварийные перегрузки, короткие замыкания, несимметричные режимы трансформаторов
Эксплуатация масла, влагообмен в трансформаторах
Текущий ремонт трансформаторов
Техническое обслуживание сварочного электрооборудования
Устранение неисправностей сварочного оборудования
Неисправности трехфазных асинхронных двигателей
Различные неисправности трехфазных асинхронных двигателей
Неисправности машин постоянного тока
Неисправности трансформаторов
Неисправности сварочных аппаратов
Неисправности реакторов, пускателей и контакторов
Сушка электромашин
Сушка обмоток силовых трансформаторов
Определение качества трансформаторного масла
Маркировка выводных концов электромашин и трансформаторов
Опытное определение группы трансформатора
Определение паспорта электромашин и трансформаторов
Механические неисправности электромашин
Неисправности коллекторов
Неисправности обмоток электромашин
Повреждения обмоток электромашин
Неисправности силовых трансформаторов
Мастерская электрика
Приборы, испытательные щиты, приспособлении и инструмент
Технологическая планировка мастерской
Техника безопасности, поражение током
Помещения и электрооборудование по признаку электробезопасности
Заземление электроустановок
Ответственность за безопасность при обслуживании и ремонте электроустановок
Эксплуатация электроустановок
Некоторые случаи травматизма
Страница 16 из 74
Конструкция синхронного двигателя аналогична конструкции синхронного генератора. Ротор обычно явнополюсной. На роторе, в его полюсных башмаках обязательно укрепляют пусковую обмотку, она подобна успокоительной обмотке генератора. Для улучшения пусковых характеристик воздушный зазор в двигателях делают несколько меньше зазора в генераторе.
Ротор обычно явнополюсной. На роторе, в его полюсных башмаках обязательно укрепляют пусковую обмотку, она подобна успокоительной обмотке генератора. Для улучшения пусковых характеристик воздушный зазор в двигателях делают несколько меньше зазора в генераторе.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного потока статора с магнитным потоком ротора (индуктора). При протекании трехфазного тока по трехфазной обмотке статора образуется вращающееся магнитное поле. Скорость вращения его при заданной частоте тока для данного двигателя величина постоянная. Магнитное поле статора жестко сцепляется с магнитным полем ротора; северный полюс статора будет против южного полюса ротора и увлечет в своем вращении ротор двигателя. Ротор двигателя вращается с постоянной скоростью независимо от величины нагрузки.
В синхронном генераторе магнитное поле статора следует за магнитным полем ротора, то есть в этом процессе ведущий — ротор. Поле статора — ведомое. Ось магнитного потока ротора в генераторе в пространстве опережает ось магнитного потока статора. Этот угол опережения увеличивается с ростом активной нагрузки генератора. В синхронном двигателе магнитное поле ротора следует за магнитным полем статора. Здесь поле статора ведущее, а ротор ведомый. В двигателе ось магнитного потока ротора в пространстве при своем вращении отстает от оси магнитного потока статора. Этот угол отставания возрастает с увеличением нагрузки двигателя (тормозного момента на валу).
Ось магнитного потока ротора в генераторе в пространстве опережает ось магнитного потока статора. Этот угол опережения увеличивается с ростом активной нагрузки генератора. В синхронном двигателе магнитное поле ротора следует за магнитным полем статора. Здесь поле статора ведущее, а ротор ведомый. В двигателе ось магнитного потока ротора в пространстве при своем вращении отстает от оси магнитного потока статора. Этот угол отставания возрастает с увеличением нагрузки двигателя (тормозного момента на валу).
В синхронных машинах угол раствора осей магнитного потока ротора и статора может увеличиться до 90°, при больших углах машина выпадает из синхронизма. В этом случае скорость ее уже не постоянная, она потребляет очень большой ток. защита должна быстро отключить двигатель от сети.
Синхронные двигатели характеризуются перегрузочной способностью, то есть отношением максимального момента к номинальному. Величина момента синхронных двигателей в отличие от асинхронных зависит от величины питающего напряжения в первой степени, то есть уменьшения напряжения, например вдвое, сопровождается уменьшением и максимального момента вдвое.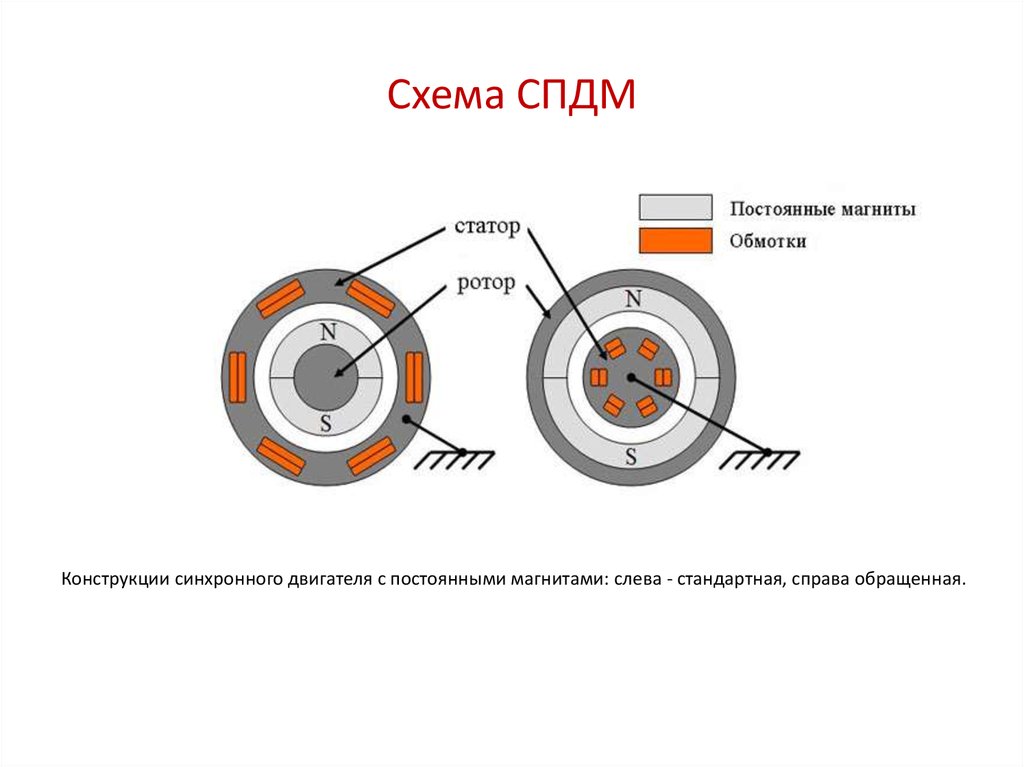 Перегрузочная способность синхронного двигателя очень существенно зависит от тока возбуждения. С уменьшением тока возбуждения уменьшается максимальный момент двигателя, а угол раствора осей потоков увеличивается. При некотором, предельно наименьшем токе возбуждения максимальный момент двигателя будет равен тормозному моменту, а угол раствора — 90. Дальнейшее уменьшение тока возбуждения приведет к тому, что максимальный момент двигателя будет меньше тормозного, двигатель выпадет из синхронизма.
Перегрузочная способность синхронного двигателя очень существенно зависит от тока возбуждения. С уменьшением тока возбуждения уменьшается максимальный момент двигателя, а угол раствора осей потоков увеличивается. При некотором, предельно наименьшем токе возбуждения максимальный момент двигателя будет равен тормозному моменту, а угол раствора — 90. Дальнейшее уменьшение тока возбуждения приведет к тому, что максимальный момент двигателя будет меньше тормозного, двигатель выпадет из синхронизма.
Коэффициент мощности синхронного двигателя может принимать разные значения в зависимости от тока возбуждения.
Коэффициент мощности и ток статора в синхронном двигателе регулируют изменением тока возбуждения. Если в асинхронных двигателях при постоянном напряжении, частоте и моменте сопротивления ток статора и коэффициент мощности вполне определенные величины, то в синхронных двигателях эти величины при тех же условиях можно изменить в широких пределах.
Можно ток возбуждения отрегулировать так, чтобы cos φ двигателя стал равным единице. Такой двигатель называют нормально возбужденным. При уменьшении тока возбуждения cos φ уменьшается, реактивную мощность двигатель потребляет из сети, которая и идет на покрытие недостатка собственного возбуждения.
Такой двигатель называют нормально возбужденным. При уменьшении тока возбуждения cos φ уменьшается, реактивную мощность двигатель потребляет из сети, которая и идет на покрытие недостатка собственного возбуждения.
Если ток возбуждения увеличивать ст значения, соответствующего нормальному возбуждению, cos φ уменьшается. В этом случае реактивная мощность отдается двигателем в сеть вследствие избытка возбуждения.
Возможность регулирования коэффициента мощности наряду с постоянством скорости вращения — важное качество синхронного двигателя в сравнении с асинхронным. При любой нагрузке синхронного двигателя сравнительно просто получить cos φ = 1, а при большем токе возбуждения он будет отдавать реактивную мощность в сеть, которую потребляют асинхронные двигатели и трансформаторы.
Ток статора синхронного двигателя в зависимости от тока возбуждения определяют (U-образной характеристикой.
U-образная характеристика представляет зависимость тока двигателя от тока возбуждения при постоянных величинах: напряжении, частоте и моменте нагрузки на валу.
Рис. 52/ U-образные характеристики синхронного двигателя:
1 — регулировочная характеристика при cos φ = L; 2 — линия статической устойчивости.
На рисунке 52 представлены (U-образные характеристики синхронного двигателя при трех значениях момента. Каждая U-образная характеристика имеет низшую точку, которая соответствует нормальному возбуждению двигателя, то есть здесь cos φ = 1. Ордината низшей точки U-образной характеристики представляет активную составляющую тока статора при данном моменте двигателя. Левая ветвь характеристики соответствует недовозбужденному режиму двигателя, когда он работает с отстающим током при потреблении реактивной мощности из сети. Правая ветвь характеристики соответствует режиму перевозбуждения двигателя, когда он работает с опережающим током при отдаче реактивной мощности в сеть.
Чем больше момент двигателя, тем выше U-образная характеристика и тем правее будет низшая ее точка. Кривая 1, соединяющая разгружена от реактивной мощности, cos φ станет близким к единице, пропускная способность линии увеличится.
С помощью компенсатора можно регулировать напряжение в конце линии передачи. Если напряжение в конце линии уменьшится, то перевозбуждением компенсатора можно напряжение довести до номинального. В случае повышения напряжения в конце линии свыше номинального, что может быть при малой нагрузке, недовозбуждением компенсатора можно снизить напряжение до требуемого уровня. Синхронный компенсатор даже при постоянном токе возбуждения способен в некоторой мере стабилизировать напряжение линии.
Синхронные компенсаторы — это крупные электрические машины мощностью в тысячи и десятки тысяч киловольт-ампер. Включают в сеть синхронные компенсаторы по методу асинхронного пуска синхронных двигателей. Очень крупные компенсаторы пускают разгонным двигателем.
Назад
Вперед
Назад
Вперед
- Вы здесь:
- Книги
- Архивы
Эксплуатация электрических машин и аппаратуры
 org/ListItem»>
org/ListItem»>Главная
Читать также:
Наладка электроустановок
Монтаж, эксплуатация и ремонт сельскохозяйственного электрооборудования
Электрооборудование сельского хозяйства
Электрические сети промышленных предприятий
Монтаж электрических установок
Синхронные и асинхронные двигатели
— где они используются?
Многие люди часто путаются в терминах «синхронные и асинхронные двигатели » и их точном назначении. Следующая информация описывает общие методы работы синхронных и асинхронных двигателей, их преимущества, их общее расположение и цели, которых может достичь каждый двигатель. Получить предложение.
Следующая информация описывает общие методы работы синхронных и асинхронных двигателей, их преимущества, их общее расположение и цели, которых может достичь каждый двигатель. Получить предложение.
Синхронный двигатель
Синхронные и асинхронные двигатели – как они работают
Синхронный двигатель
Это типичный синхронный двигатель переменного тока , способный генерировать синхронную скорость. В этих двигателях и статор, и ротор вращаются с одинаковой скоростью, благодаря чему достигается синхронизация. Основной принцип работы заключается в том, что когда двигатель подключен к источнику питания, в обмотки статора протекает ток, который создает вращающееся электромагнитное поле. Он снова индуцируется в обмотках ротора, а затем начинает вращаться.
Внешний источник питания постоянного тока требуется для блокировки направления и положения ротора относительно направления и положения статора. Из-за этой блокировки двигатели должны работать синхронно или вообще не работать.
Из-за этой блокировки двигатели должны работать синхронно или вообще не работать.
Асинхронный двигатель
Принцип работы асинхронного двигателя почти такой же, как у синхронного двигателя, за исключением того, что асинхронный двигатель не подключен к внешнему возбудителю. Короче говоря, асинхронные двигатели (также называемые асинхронными двигателями) также работают по принципу электромагнитной индукции. В этом случае ротор не получает электрической энергии за счет проводимости, как двигатель постоянного тока.
Единственная проблема заключается в том, что к асинхронному двигателю не подключено внешнее устройство для отключения ротора, поэтому скорость вращения ротора зависит от меняющейся интенсивности магнитной индукции. Это изменяющееся электромагнитное поле заставляет ротор вращаться медленнее, чем магнитное поле статора. Поскольку скорость вращения ротора и скорость магнитного поля статора изменяются, эти двигатели называются асинхронными. Разница в скорости называется скольжением.
Разница в скорости называется скольжением.
Синхронные и асинхронные двигатели – преимущества и недостатки
Синхронный двигатель работает с заданной частотой и постоянной скоростью независимо от нагрузки. Однако скорость асинхронного двигателя будет уменьшаться по мере увеличения нагрузки.
Синхронные двигатели могут работать с большими коэффициентами мощности, в том числе с запаздыванием и опережением, в то время как асинхронные двигатели всегда работают с запаздыванием p.f. Когда нагрузка уменьшается, отставание p.f может быть очень низким.
Синхронные двигатели не являются самозапускающимися, поскольку асинхронные двигатели могут запускаться самостоятельно.
Как и у асинхронного двигателя, на крутящий момент синхронного двигателя не влияют изменения напряжения.
Для запуска синхронного двигателя требуется внешнее возбуждение постоянного тока, но асинхронный двигатель может работать без внешнего возбуждения.
Синхронные двигатели, как правило, дороже и сложнее, чем асинхронные двигатели, в то время как асинхронные двигатели дешевле и удобны в использовании.
Синхронные двигатели особенно подходят для низкоскоростных приводов, поскольку их коэффициент мощности всегда можно отрегулировать до 1,0, а их эффективность высока. С другой стороны, асинхронные двигатели подходят для скоростей выше 600 об/мин.
В отличие от асинхронных двигателей, синхронные двигатели могут работать на сверхнизких скоростях благодаря использованию мощных электронных преобразователей, генерирующих очень низкие частоты. Их можно использовать для привода дробилок, вращающихся печей и шаровых мельниц с регулируемой скоростью.
Применение синхронного двигателя
Обычно используются на электростанциях для получения надлежащего коэффициента мощности. Они работают параллельно с шиной и обычно перевозбуждаются извне для достижения требуемого коэффициента мощности.
Они также используются в обрабатывающей промышленности, где используется большое количество асинхронных двигателей и трансформаторов для решения проблемы отставания коэффициента мощности.
Используется на электростанциях для выработки электроэнергии требуемой частоты.
Используется для управления напряжением путем изменения возбуждения в линии передачи.
Применение асинхронного двигателя
Более 90% двигателей в мире являются асинхронными двигателями, и асинхронные двигатели широко используются в различных областях. Некоторые из них:
Центробежные вентиляторы, воздушные панели и насосы
компрессор
Конвейер
Подъемники и тяжелые краны
Lathe
ПЕТКЕТ, Текстильные и бумажные мельницы
В заключение
В коротких, использование Syncrons 444. низкоскоростная или ультранизкоскоростная производительность и требуемый коэффициент мощности существует. Асинхронные двигатели в основном используются в большинстве вращающихся или движущихся машин, таких как вентиляторы, лифты, шлифовальные машины и т. д.
Связанные продукты
Слипковые кольцевые двигатели
Большие синхронные двигатели
Трехфазный асинхронный мотор
Высокоэффективная постоянная магнитная мотор
What Typors of Electric Motors? Коллекторные, асинхронные и синхронные устройства постоянного тока
Свяжитесь с Valin сегодня для получения дополнительной информации по телефону (855) 737-4716 или заполните нашу онлайн-форму.
Шоу управления движением
Я уже говорил о том, что такое электродвигатель, теперь я расскажу о нескольких различных типах электродвигателей. В частности, я собираюсь поговорить о коллекторных двигателях постоянного тока, асинхронных и синхронных. Я Кори Фостер из Valin Corporation. Посмотрим, чему мы можем научиться.
Есть много людей, которые знают о некоторых типах электродвигателей гораздо больше, чем я, поэтому я обратился к моему хорошему другу и коллеге Джону Брокоу, чтобы поделиться своим мнением о некоторых из этих типов.
КОРИ: Джон, что вы можете рассказать мне о коллекторном двигателе постоянного тока?
ДЖОН: Это старейший школьный грязный мотор из когда-либо созданных. Эта вещь была вокруг. Посмотрите прямо здесь, на слайдах, изобретенных Фарадеем в 1821 году. Итак, это технология на 200 лет. На самом деле он все еще используется во многих приложениях, потому что он относительно недорог. У него есть несколько известных проблем, о которых все знают. Чаще всего это износ щеток. У вас есть эти керамические угольные щетки, которые пропускают ток к вращающемуся ротору, и износ этих щеток они просто, как и все остальное, они в конечном итоге изнашиваются, и их нужно заменять. Это выводит из строя ваш двигатель, независимо от транспортного средства, над которым он работает, и это просто неприятность.
Чаще всего это износ щеток. У вас есть эти керамические угольные щетки, которые пропускают ток к вращающемуся ротору, и износ этих щеток они просто, как и все остальное, они в конечном итоге изнашиваются, и их нужно заменять. Это выводит из строя ваш двигатель, независимо от транспортного средства, над которым он работает, и это просто неприятность.
КОРИ: Итак, там, где щеточный двигатель постоянного тока здесь коммутируется обрывом проводов и этих щеток здесь, двигатель переменного тока на самом деле коммутируется синусоидальной частотой переменного тока, поступающего сюда и подаваемого на контакторы. Теперь это показывает, что катушка находится внутри, но на самом деле, обычно катушка представляет собой статор снаружи с ротором внутри, который вращается. Но это хорошо для сравнения. Разница между переменным и постоянным током и как они коммутируются.
Прежде чем я расскажу больше о двигателях переменного тока, давайте поговорим о синхронных и асинхронных двигателях. В асинхронном двигателе переменного тока нет магнитов, поэтому он фактически вращается медленнее, чем синхронная скорость поступающей в него частоты. Я уже говорил о том, как двигатель переменного тока коммутирует входную частоту переменного тока, 60 Гц здесь, в США, но асинхронный двигатель, поскольку у него нет магнитов, фактически будет отставать от этого, и он всегда будет работать до настигнуть. Итак, вы можете видеть здесь, что это частота, умноженная на 120, деленная на количество полюсов минус некоторое скольжение. Таким образом, он всегда будет работать, чтобы наверстать упущенное, в то время как в синхронном двигателе есть несколько постоянных магнитов, так что он привязан к управляемой частоте, которая поступает в него, и он всегда будет вращаться с этой синхронной скоростью.
Я уже говорил о том, как двигатель переменного тока коммутирует входную частоту переменного тока, 60 Гц здесь, в США, но асинхронный двигатель, поскольку у него нет магнитов, фактически будет отставать от этого, и он всегда будет работать до настигнуть. Итак, вы можете видеть здесь, что это частота, умноженная на 120, деленная на количество полюсов минус некоторое скольжение. Таким образом, он всегда будет работать, чтобы наверстать упущенное, в то время как в синхронном двигателе есть несколько постоянных магнитов, так что он привязан к управляемой частоте, которая поступает в него, и он всегда будет вращаться с этой синхронной скоростью.
Для этого мне нужно вернуться к Джону Брокоу. Джон, асинхронные и асинхронные двигатели переменного тока — это одно и то же?
ДЖОН: Все асинхронные двигатели переменного тока являются асинхронными. Но вы можете получить из них синхронные, псевдосинхронные приложения, соединив их с обратной связью и выполняя над ними векторное управление. Именно здесь вы фактически контролируете угол между этими двумя и контролируете частоту скольжения, чтобы она была именно такой, какой вы хотите, чтобы создать характеристики крутящего момента / скорости приложения.
Именно здесь вы фактически контролируете угол между этими двумя и контролируете частоту скольжения, чтобы она была именно такой, какой вы хотите, чтобы создать характеристики крутящего момента / скорости приложения.
А вот и внутренности асинхронного двигателя переменного тока. Вы можете видеть, что это классический асинхронный двигатель, в котором вы не видите никаких щеток или чего-либо еще. У вас есть ротор в сборе посередине, который привязан к валу, проходящему через него. Единственным изнашиваемым компонентом типичного асинхронного двигателя переменного тока являются подшипники, которые вы можете видеть на концах двигателя. Существует ряд аксессуаров, которые можно добавить к асинхронному двигателю в зависимости от области применения. Один из основных моментов, о котором следует подумать, — это охлаждение. У этого есть вентилятор. Это похоже на полностью закрытый двигатель с вентиляторным охлаждением. Вы также можете иметь невентилируемые двигатели, которые герметичны. У вас может быть открытый двигатель, через который фактически проходит воздух. Вы можете принудительно проветрить эти вещи. Вы можете поставить гидравлические рубашки охлаждения на двигатель. Есть много разных способов охладить двигатель. В конце концов, нужно помнить, что электродвигатель представляет собой медную катушку, через которую вы пропускаете электричество. Всякий раз, когда это происходит, это электрический обогреватель. Таким образом, вы собираетесь генерировать тепло в системе и каким-то образом вы должны отводить это тепло. Управление теплом является одним из ключевых вопросов при выборе, определении размеров и эксплуатации двигателей.
Вы можете принудительно проветрить эти вещи. Вы можете поставить гидравлические рубашки охлаждения на двигатель. Есть много разных способов охладить двигатель. В конце концов, нужно помнить, что электродвигатель представляет собой медную катушку, через которую вы пропускаете электричество. Всякий раз, когда это происходит, это электрический обогреватель. Таким образом, вы собираетесь генерировать тепло в системе и каким-то образом вы должны отводить это тепло. Управление теплом является одним из ключевых вопросов при выборе, определении размеров и эксплуатации двигателей.
Другими точками износа, которые вы можете увидеть, являются подшипники. Подшипники, как и любые подшипники, как и подшипники в вашей машине, рано или поздно вам придется их заменить, потому что они изнашиваются. Есть некоторые другие аксессуары, прокладки, уплотнения, разные вещи в зависимости от среды, в которой вы на самом деле размещаете свой асинхронный двигатель, и от того, каково приложение.
КОРИ: Давайте поговорим о двигателях переменного тока и частотно-регулируемых приводах, которые их приводят в действие. Что вы о них думаете?
Что вы о них думаете?
ДЖОН: ЧРП — это здорово. Это действительно зависит от приложения, потому что вы обычно говорите о нескольких разных вещах. Один — что ты хочешь? Как вы хотите запустить двигатель? И есть несколько разных способов сделать это. Вы можете начать через линию. Это означает, что, по сути, у вас просто есть выключатель, и вы, по сути, идете на YAK, и внезапно из электрической сети начинает дуть ток. Проблемы с этим. Это немного тяжело для двигателя, потому что вы создаете импульс в двигателе. Это также может повлиять на вашу локальную электросеть, и компьютерам в этой системе действительно не нравится, когда вы это делаете. Это действительно грубый способ запуска двигателя. Это сделано. Это сделано во многих разных местах, где это не имеет значения. Скажем, если вы используете насос для ирригационного сооружения, вы обычно подключаетесь к выделенной линии. Вокруг не так много компьютеров, которые будут чувствительны к этому. Вы просто бросаете вещь и запускаете насос.
Другой метод — плавный пуск. Это электронные компоненты, которые в основном медленно увеличивают напряжение в течение 5, 10, 15 секунд, чтобы сделать это закрытие более плавным. Это намного проще для двигателя, и гораздо меньше шума возвращается в вашу электрическую сеть. Это старый и грязный способ запуска электродвигателя, который применялся уже пару сотен лет.
С 60-х годов у нас есть частотно-регулируемые приводы. С появлением полупроводников мы можем выполнять различные широтно-импульсные модуляции для запуска управления частотой асинхронного двигателя переменного тока. Помните, двигатели следуют за поступающей в них частотой. Таким образом, регулируя частоту, вы можете регулировать скорость двигателя. Это имеет много преимуществ. Применение насоса: вы можете фактически контролировать, сколько воды вы накачиваете, где вы работаете с кривой двигателя насоса. Получает немного больше эффективности. Вы можете оптимизировать приложение. Затем вы также можете медленно увеличивать скорость, чтобы вы не просто замыкали линию, а делали ее более плавной и чистой для энергосистемы. Обратите внимание на некоторые частотно-регулируемые приводы, в которые вам может понадобиться установить фильтр, потому что они создают некоторые гармоники, которые могут вернуться в вашу электросеть, но в целом частотно-регулируемый привод намного чище с электрической точки зрения, способ установки и запуска двигателя.
Обратите внимание на некоторые частотно-регулируемые приводы, в которые вам может понадобиться установить фильтр, потому что они создают некоторые гармоники, которые могут вернуться в вашу электросеть, но в целом частотно-регулируемый привод намного чище с электрической точки зрения, способ установки и запуска двигателя.
КОРИ: Чтобы понять, что такое синхронный двигатель, он характеризуется постоянной скоростью вращения, которая не зависит от нагрузки, но связана с частотой сети или током в зависимости от типа привода. Вот откуда взялся термин «синхронный», и это в основном делается с помощью постоянных магнитов, которые там находятся. Если вы посмотрите на конструкцию, она немного отличается от асинхронного двигателя переменного тока. Я хочу, чтобы Джон Брокоу указал нам на кое-что.
ДЖОН: Обратите внимание, что в синхронном двигателе всегда есть пара вещей. У вас всегда будет обратная связь по синхронному двигателю. Вы делаете это, потому что вам нужно знать, где на самом деле находятся магниты, потому что они чередуют север, юг, север, юг вокруг ротора. Как вы можете видеть на диаграмме в правом нижнем углу, вы можете видеть все маленькие магниты, установленные на поверхности, и они на самом деле, если вы на самом деле поместите туда магнит, вы действительно увидите их чередующиеся север, юг, Север, Юг, Север, Юг, когда вы вращаетесь вокруг ротора. Это то, против чего катушки реагируют и могут фактически вращать это, чередуя. Без обратной связи на устройстве вы не будете знать, где вы должны включить или выключить нужную катушку, и вы можете в конечном итоге бороться с самой системой.
Как вы можете видеть на диаграмме в правом нижнем углу, вы можете видеть все маленькие магниты, установленные на поверхности, и они на самом деле, если вы на самом деле поместите туда магнит, вы действительно увидите их чередующиеся север, юг, Север, Юг, Север, Юг, когда вы вращаетесь вокруг ротора. Это то, против чего катушки реагируют и могут фактически вращать это, чередуя. Без обратной связи на устройстве вы не будете знать, где вы должны включить или выключить нужную катушку, и вы можете в конечном итоге бороться с самой системой.
КОРИ: Итак, Джон, возникает вопрос: синхронные и серводвигатели — это одно и то же?
ДЖОН: Все серводвигатели переменного тока являются синхронными. Все синхронные двигатели не являются серводвигателями. Есть несколько необычных синхронных двигателей, которые не являются серводвигателями; переключать реактивные двигатели, шаговые двигатели синхронны, потому что они следуют частоте, но они не являются серводвигателями.
КОРИ: Если поставить два типа двигателей рядом, вы увидите, насколько конструкция похожа, но также и чем она отличается. Асинхронные двигатели могут быть огромными. Они могут быть совершенно огромными, размером с небольшую комнату. Синхронные двигатели, магниты становятся слишком дорогими, так что они на самом деле не будут больше большой кошки, самое большее. Но есть некоторые сходства, некоторые различия.
Асинхронные двигатели могут быть огромными. Они могут быть совершенно огромными, размером с небольшую комнату. Синхронные двигатели, магниты становятся слишком дорогими, так что они на самом деле не будут больше большой кошки, самое большее. Но есть некоторые сходства, некоторые различия.
Теперь Джон действительно хотел убедиться, что я объяснил важность расчета лошадиных сил. Мощность равна крутящему моменту, умноженному на скорость. Мощность может быть в лошадиных силах или может быть в ваттах. Вычисление, которое я люблю использовать, просто по памяти, заключается в том, что лошадиные силы равны крутящему моменту в унциях-дюймах, умноженному на скорость в оборотах в секунду, деленному на 16 800. Теперь это важно, потому что асинхронные двигатели и двигатели переменного тока оцениваются в лошадиных силах, но если у вас есть серводвигатель, у нас есть кривые скорость / крутящий момент, которые часто выглядят так, где у вас есть крутящий момент здесь и скорость здесь. Это в значительной степени одна и та же мощность от начала до конца, но это производство крутящего момента и скорости, поэтому мы часто не говорим о мощности серводвигателя или синхронного двигателя с точки зрения мощности. Мы говорим об этом с точки зрения скорости и крутящего момента. (Один двигатель может иметь высокий крутящий момент, тогда как другой имеет высокую скорость, но одинаковую мощность.) Таким образом, если кто-то хочет перейти от двигателя переменного тока к серводвигателю, он не может просто сказать: «Эй, дайте мне 1 киловатт». мотор. Да, и мы пытаемся приспособиться, но на самом деле лучше узнать, какая скорость и крутящий момент вам нужны? Так что это действительно важно здесь. Одна лошадиная сила равна 756 Вт.
Мы говорим об этом с точки зрения скорости и крутящего момента. (Один двигатель может иметь высокий крутящий момент, тогда как другой имеет высокую скорость, но одинаковую мощность.) Таким образом, если кто-то хочет перейти от двигателя переменного тока к серводвигателю, он не может просто сказать: «Эй, дайте мне 1 киловатт». мотор. Да, и мы пытаемся приспособиться, но на самом деле лучше узнать, какая скорость и крутящий момент вам нужны? Так что это действительно важно здесь. Одна лошадиная сила равна 756 Вт.
Последнее сравнение. Важной частью этого графика являются различные типы приложений. Асинхронные двигатели действительно лучше подходят для приложений с постоянной скоростью, где синхронные двигатели необходимы для более точной скорости, а также для приложений типа позиционирования. Итак, я надеюсь, что это поможет.
Я Кори Фостер из Valin Corporation. Свяжитесь с нами здесь. Спасибо, Джон Брокоу, за помощь. Сегодня я многому научился. Надеюсь, это поможет.
Если у вас есть какие-либо вопросы или вам просто нужна помощь, мы будем рады обсудить с вами вашу заявку. Свяжитесь с нами по телефону (855) 737-4716 или заполните нашу онлайн-форму.
Свяжитесь с нами по телефону (855) 737-4716 или заполните нашу онлайн-форму.
Синхронные и асинхронные двигатели: обнаружение различий
Упрощенное разделение двигателей с дробной мощностью будет следующим: переменного тока, постоянного тока, бесщеточные и универсальные. Однако так же, как обувь можно разделить на рабочие ботинки, классические туфли, кроссовки и т. д., каждая двигательная категория имеет различные подгруппы. Например, двигатели переменного тока можно разделить на синхронные и асинхронные (также известные как асинхронные).
Хотя оба работают от сети переменного тока (хотя синхронный также использует постоянный ток), их создание, работа и использование сильно различаются.
Прежде чем разбить обсуждение на две категории переменного тока, важно помнить, что в типичном двигателе переменного тока (как более подробно описано в нашем блоге AC Motor Basics ) вращающееся магнитное поле создается статором, индуцируется входным током.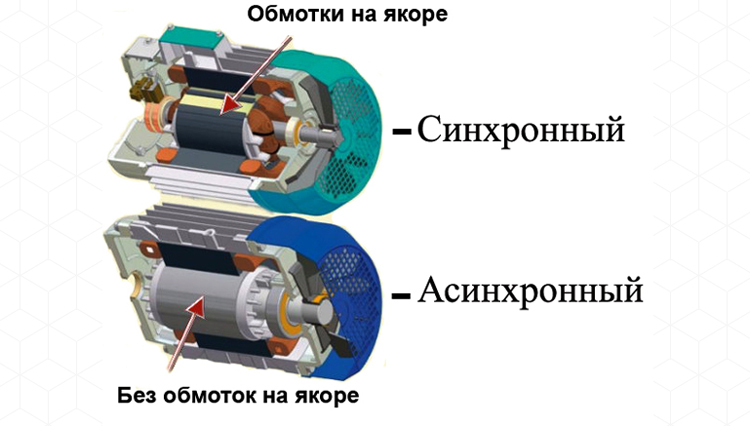 Скорость этого поля определяется частотой источника питания и числом полюсов машины и называется «синхронной скоростью», точнее, скоростью, возникающей одновременно.
Скорость этого поля определяется частотой источника питания и числом полюсов машины и называется «синхронной скоростью», точнее, скоростью, возникающей одновременно.
Асинхронный двигатель
Говоря об асинхронных двигателях, обычно имеют в виду асинхронные двигатели переменного тока. Наиболее распространенный тип, асинхронный двигатель переменного тока с короткозамкнутым ротором, обычно имеет стационарную обмотку, называемую статором, а также ротор, сделанный из электротехнической стали и токопроводящих стержней из алюминия или меди, которые закорочены на каждом конце.
Как указано выше, магнитное поле создается в статоре от сети переменного тока, которая, в свою очередь, индуцирует токи в токопроводящих стержнях ротора. Этот эффект индукции домино приводит к притяжению между вращающимся магнитным полем статора и индуцированным магнитным полем ротора. Простое уравнение может помочь проиллюстрировать это более четко.
Питание переменного тока + статор = вращающееся магнитное поле #1 (синхронная скорость)
Вращающееся магнитное поле #1 + ротор = вращающееся магнитное поле #2 (отставание от синхронной скорости)
Ротор, естественно, будет вращаться медленнее, чем синхронная скорость магнитного поля в статоре, но притяжение между компонентами статора и ротора ставит их в непрерывную игру в догонялки (за счет создания крутящего момента). Разница между этими двумя скоростями называется скольжением и обычно указывается в процентах от синхронной скорости.
Разница между этими двумя скоростями называется скольжением и обычно указывается в процентах от синхронной скорости.
Магнитное поле #1 (быстрее) – Магнитное поле #2 (медленнее) = Скольжение
Синхронный двигатель
синхронная скорость. Это возможно, потому что синхронные двигатели основаны на частоте и не зависят от постоянства начального входного тока.
Представьте себе синхронисток на соревнованиях по прыжкам в воду. Их движения точно совпадают с движениями другого члена команды по плаванию — их начало, середина и точки входа потенциально идентичны.
Синхронные двигатели работают примерно так же. Однако точно так же, как потребовалось бы много времени, чтобы достичь такого уровня единообразия в их методах погружения, синхронные двигатели не достигают одинакового вращения между магнитными полями ротора и статора только с начальным входным током. Мощность переменного тока индуцирует статор (как типичный асинхронный двигатель), но затем он достигает точки запаздывания, мощность постоянного тока подается через возбудитель — устройство, которое подает на двигатель ток намагничивания для создания потока.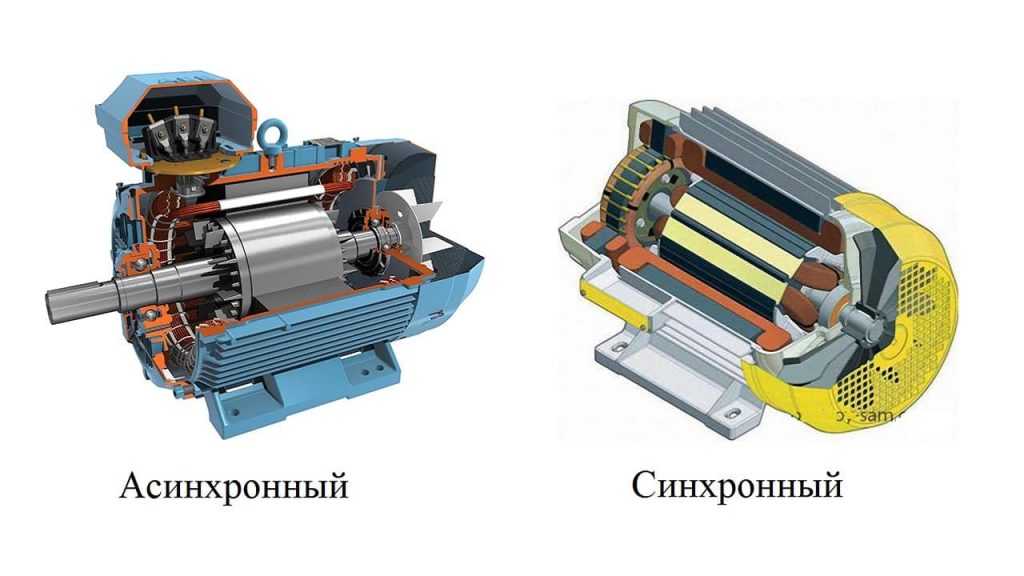 Это позволяет вращению увеличиваться и связываться с синхронной скоростью, и, если на это не воздействуют экстремальные условия, эти скорости будут оставаться синхронизированными, что позволяет использовать высокоточные функции с помощью используемого приложения.
Это позволяет вращению увеличиваться и связываться с синхронной скоростью, и, если на это не воздействуют экстремальные условия, эти скорости будут оставаться синхронизированными, что позволяет использовать высокоточные функции с помощью используемого приложения.
Это подводит нас к краткому обзору того, как различное устройство двигателей переменного тока позволяет каждому поддерживать свою индивидуальную и разнообразную работу и использование.
Синхронный:
- Более высокая начальная стоимость
- Требуется возбудитель
- Для высокоточных приложений (таких как часы или проигрыватель)
- Наиболее эффективен в больших промышленных двигателях
- Зависит от частоты (более согласованный)
Индукция:
- Потенциально более высокая стоимость жизненного цикла
- Специальные элементы управления обычно не требуются
- Более распространенный; используется во многих повседневных приложениях
- Наиболее эффективен в небольших приложениях
- Скорость зависит от крутящего момента
Как видите, асинхронные и синхронные двигатели, хотя и классифицируются как двигатели переменного тока, имеют довольно разные конструктивные и эксплуатационные характеристики, причем наиболее важным фактором является наличие скольжения. Из-за этого асинхронные двигатели обычно не могут поддерживать постоянную скорость в приложениях с переменным моментом нагрузки.
Из-за этого асинхронные двигатели обычно не могут поддерживать постоянную скорость в приложениях с переменным моментом нагрузки.
Синхронные двигатели лучше всего подходят для больших приложений, тогда как Groschopp специализируется на двигателях с дробной мощностью, которые обычно не требуют атрибутов синхронного двигателя. Однако, если требуется постоянство синхронности, этот недостаток асинхронных двигателей переменного тока можно преодолеть с помощью частотно-регулируемого привода (ЧРП) или векторного привода.
Асинхронный двигатель | Асинхронный двигатель
Наиболее часто используемым двигателем в мире является асинхронный двигатель или асинхронный двигатель. Это двигатель, который может работать без электрического подключения к ротору. В этом посте будут обсуждаться асинхронные двигатели (асинхронные двигатели), их типы, т. е. однофазные, трехфазные, короткозамкнутые, токосъемные и т. д., особенности, принципы работы, области применения, преимущества и недостатки.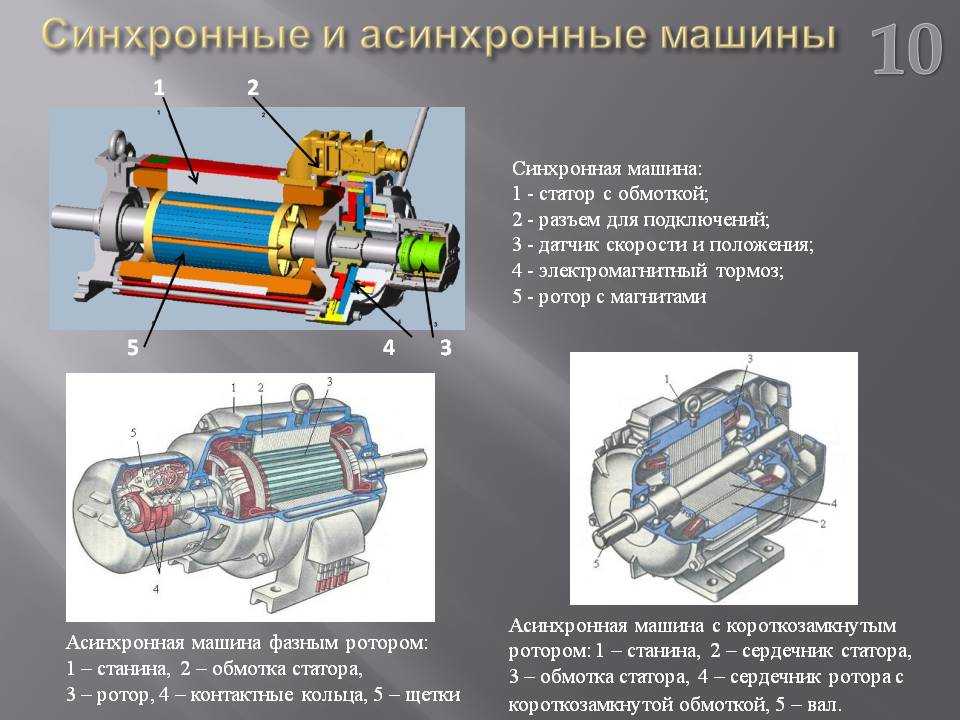
Что такое асинхронный двигатель (асинхронный двигатель)
Асинхронный двигатель или асинхронный двигатель — это самый простой и распространенный тип электродвигателя, который имеет только обмотку Armortisseur , что означает вспомогательную обмотку только на якоре. В асинхронном двигателе (или асинхронном двигателе) статорная часть двигателя обеспечивает электромагнитное поле своей обмоткой роторной части двигателя. Это генерирует электрический ток в роторе. Электрический ток создает крутящий момент, который приводит в движение.
Рис. 1. Знакомство с асинхронным двигателем (асинхронным двигателем)
Он называется «Асинхронный двигатель », поскольку он всегда будет работать со скоростью, меньшей, чем его синхронная скорость. Синхронная скорость определяется как скорость магнитного поля вращающейся машины, которая снова определяется количеством полюсов и частотой в машине.
Поскольку в этом типе двигателя ротор получает поток и вращение за счет магнитного поля в статоре, существует задержка между токами в статоре и роторе. Из-за этого ротор никогда не достигает своей синхронной скорости. Отсюда и термин «асинхронный двигатель». На рис. 2 показаны части асинхронного двигателя.
Из-за этого ротор никогда не достигает своей синхронной скорости. Отсюда и термин «асинхронный двигатель». На рис. 2 показаны части асинхронного двигателя.
Fig. 2 – Parts of Induction Motor (Asynchronous Motor)
Construction of Induction Motor (Asynchronous Motor)
It consists of mainly two parts namely:
- Stator
- Rotor
Stator
Стационарная часть электродвигателя. Эта часть обеспечивает электромагнитное поле, необходимое для привода вращающейся части двигателя. Он состоит из ряда штамповок с прорезями для трехфазной обмотки. Каждая обмотка отделена на 120 градусов от другой обмотки.
Ротор
Это вращающаяся часть двигателя. Более распространенным типом ротора в асинхронных двигателях (или асинхронных двигателях) является короткозамкнутый ротор. Ротор выполнен в виде якоря с сердечником цилиндрической формы. Вокруг сердечника расположены параллельные щели, через которые проходит проводимость. Сердечник имеет стержень из алюминия, меди или сплава.
Сердечник имеет стержень из алюминия, меди или сплава.
Рис. 3 – Основной ротор и статор
Типы асинхронных двигателей (асинхронных двигателей)
Он подразделяется на два типа:
- Однофазный асинхронный двигатель
- Трехфазный асинхронный двигатель
Однофазный асинхронный двигатель
Однофазный асинхронный двигатель не является самозапускающимся двигателем. Здесь двигатель подключен к однофазному источнику питания, который передает переменный ток на основную обмотку. Поскольку переменный ток представляет собой синусоидальную волну, он создает пульсирующее магнитное поле в обмотке статора.
Пульсирующие магнитные поля представляют собой два магнитных поля, вращающихся в противоположных направлениях; следовательно, крутящий момент не создается. Таким образом, после подачи тока ротор должен двигаться в любом направлении извне, чтобы двигатель начал работать.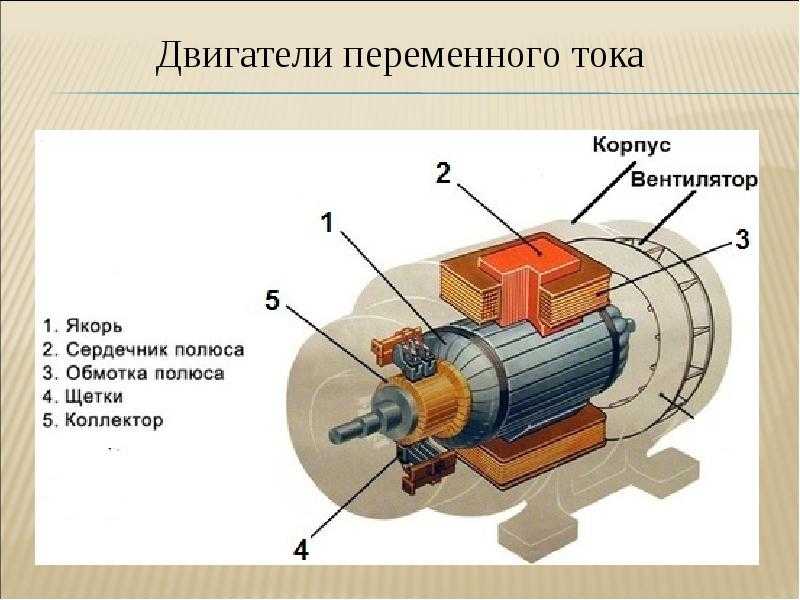 Следовательно, однофазный индуктор; могут иметь разные разновидности в зависимости от устройства, которое используется для пуска двигателя и составляют:
Следовательно, однофазный индуктор; могут иметь разные разновидности в зависимости от устройства, которое используется для пуска двигателя и составляют:
- Двигатель разделения фазы
- Заштрихованный полюсный двигатель
- Старт мотор конденсатора
- Пуск или конденсатор. Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель (асинхронный двигатель)
Это двигатели, для запуска которых не требуется никаких внешних устройств, таких как конденсатор, центробежный выключатель или пусковая обмотка. Принцип работы этого двигателя основан на трех одиночных фазах, между которыми разность фаз составляет 120 градусов. Таким образом, магнитное поле, вызывающее вращение, будет иметь одинаковую разницу фаз между ними, что заставит ротор двигаться без какого-либо внешнего крутящего момента.
Для дальнейшего упрощения предположим, что есть три фазы: фаза 1, фаза 2 и фаза 3. Таким образом, первая фаза 1 намагничивается, и ротор начинает двигаться в этом направлении, вскоре после этого возбуждается фаза 2, и затем ротор притягивается к фазе 2, а затем, наконец, к фазе 3.
Таким образом, ротор будет продолжать вращаться.Далее они делятся на категории в зависимости от типа используемого ротора:
- Асинхронный двигатель с короткозамкнутым ротором
- Асинхронный двигатель с контактным кольцом или двигатель с фазным ротором
Асинхронный двигатель с короткозамкнутым ротором
В этом типе ротор имеет форму короткозамкнутого ротора, отсюда и название. Ротор изготовлен из стали с металлами с очень высокой проводимостью, такими как алюминий и медь, на его поверхности. Очень легко изменить скорость этого типа асинхронного двигателя, просто изменив форму стержней в роторе.
Рис. 5 – Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с контактным кольцом или двигатель с фазным ротором
Также известен как асинхронный двигатель с фазовой обмоткой. Здесь ротор подключен к внешнему сопротивлению через токосъемные кольца. Скорость ротора регулируется путем регулировки внешнего сопротивления.
Поскольку этот двигатель имеет больше обмоток, чем асинхронный двигатель с короткозамкнутым ротором, его также называют асинхронным двигателем с фазным ротором.Рис. 6 – Асинхронный двигатель с контактными кольцами
Особенности асинхронного двигателя
Ниже приведены характеристики двух различных типов асинхронных двигателей.
Особенности однофазного асинхронного двигателя
- Здесь мы выделим некоторые характеристики, применимые только к однофазным асинхронным двигателям:
- Однофазные асинхронные двигатели не запускаются самостоятельно и используют однофазное питание. для вращения.
- Чтобы изменить направление вращения в однофазных двигателях, лучше всего остановить двигатель и изменить его, иначе существует вероятность повреждения двигателя из-за момента инерции, который действует против направления, на которое необходимо изменить вращение.
- Для запуска двигателя вам потребуется конденсатор и/или центробежный выключатель.
- У этих двигателей низкий пусковой момент.
- Они в основном используются дома или в бытовых приборах из-за низкого коэффициента мощности и эффективности.
Особенности трехфазного асинхронного двигателя
Ниже перечислены некоторые особенности трехфазного асинхронного двигателя, отличающие его от однофазного двигателя:
- Это двигатели с автоматическим запуском и не требуют специальных стартеров.
- Имеется три однофазных линии с разностью фаз 120 градусов.
- Имеет более простое подключение и более надежен, чем однофазные асинхронные двигатели.
- Пусковой момент этих двигателей выше, чем у однофазных двигателей.
- Они в основном используются на заводах и в промышленности из-за высокого коэффициента мощности и эффективности.
Как работает асинхронный двигатель (асинхронный двигатель) Работа
Явление, благодаря которому работают асинхронные или асинхронные двигатели, весьма интересно.
Двигатели постоянного тока нуждаются в двойном возбуждении для вращения, одно к статору, а другое к ротору. Но в этих двигателях нам нужно дать его только статору, что делает его уникальным. Как следует из названия, принцип работы этого двигателя основан на индукции. Давайте выполним ряд шагов, которые происходят при вращении этого двигателя:- Питание подается на обмотки статора, протекает ток и создается магнитный поток.
- Обмотка в роторе устроена таким образом, что каждая катушка замыкается накоротко.
- Короткозамкнутая обмотка ротора разрезается магнитным потоком статора.
Рис. 7 – Работа асинхронного двигателя
Согласно законам электромагнитной индукции Фарадея, магнитное поле взаимодействует с электрической цепью, создавая ЭДС (электродвижущую силу). Итак, на основании этого закона в обмотках ротора начинает течь ток.
- Ток в роторе создает другой поток.
- Теперь есть два потока, один в статоре, а другой в роторе.
- Поток ротора отстает от потока статора, что может создать крутящий момент в роторе в направлении магнитного поля.
Применение асинхронных двигателей
Области применения включают:
- Они широко используются в миксерах, игрушках, вентиляторах и т. д.
- Они также используются в насосах и компрессорах.
- Малые асинхронные двигатели используются в электробритвах.
- Они используются в буровых машинах, лифтах, кранах и дробилках.
- Они подходят для приводов текстильных и маслоэкстракционных заводов.
Преимущества асинхронного двигателя
Ниже приведены некоторые преимущества асинхронных двигателей:
- Высокоэффективный и простой в конструкции.
- Очень прочный и может работать в любых условиях.
- Низкие эксплуатационные расходы, так как в них нет многих деталей, таких как коллекторы или щетки.
- Они могут развивать очень высокую скорость, не беспокоясь об износе, так как у них нет щеток.
- Они просты в эксплуатации, так как не имеют электрических разъемов для ротора.
- Поскольку у них нет щеток, искры не опасны, поэтому их можно использовать в загрязненных или взрывоопасных средах.
- Изменение скорости от малой нагрузки до номинальной очень мало.
Недостатки асинхронного двигателя
Асинхронные двигатели имеют простую конструкцию, которая может иметь несколько недостатков, перечисленных ниже:
- Трудно контролировать скорость асинхронного двигателя, поэтому его нельзя использовать в местах, требующих точного контроля скорости. .
- Падение эффективности при малых нагрузках.
- Имеют высокие входные импульсные токи, что приводит к низкому напряжению при пуске двигателя.
См. также: Видео на Youtube по асинхронным двигателям
Читайте также: Маховик как накопитель энергии, расчеты и требования к ротору Повышающий трансформатор — работа, конструкция, применение и преимущества Синхронный двигатель - конструкция, принцип, типы, характеристики Что такое токоизмерительные клещи (тестер клещей) - типы, принцип работы и принцип работы
электродвигатель | Определение, типы и факты
трехфазный асинхронный двигатель
См.
все СМИ- Ключевые люди:
- Никола Тесла
Томас Давенпорт
Ипполит Фонтейн
Майкл Фарадей
- Связанные темы:
- синхронный двигатель
линейный двигатель
ротор
коммутатор
арматура
См. всю связанную информацию →
электродвигатель , любой из классов устройств, преобразующих электрическую энергию в механическую, обычно с использованием электромагнитных явлений.
Большинство электродвигателей развивают свой механический крутящий момент за счет взаимодействия проводников с током в направлении, перпендикулярном магнитному полю. Различные типы электродвигателей различаются способами расположения проводников и поля, а также управлением, которое может осуществляться над механическим выходным крутящим моментом, скоростью и положением. Большинство основных видов описаны ниже.
Простейший тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы в железе статора.
Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.Основу работы асинхронного двигателя можно разработать, если сначала предположить, что обмотки статора подключены к трехфазному источнику электропитания и что в обмотках статора протекает набор из трех синусоидальных токов формы, показанной на рисунке. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки. В данный момент t 1 ток в фазе a максимально положителен, а в фазах b и c вдвое меньше отрицательного значения.
Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую периода позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.Britannica Quiz
Электричество: короткие замыкания и постоянные токи
В чем разница между электрическим проводником и изолятором? Кто изобрел аккумулятор? Почувствуйте, как ваши клетки горят, пока вы перезаряжаете свою умственную батарею, отвечая на вопросы этой викторины.
Вращательное движение магнитного поля по отношению к проводникам ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент t 1 рисунка показан на этом рисунке. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т.
е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, как раз достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы.
токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить требуемую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подпишитесь сейчасБольшинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазной сети постоянного напряжения и постоянной частоты. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для мощных двигателей мощностью до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения во времени магнитного потока в статоре машины. Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки. При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера.
Эту разницу в скорости часто называют скольжением.Другие синхронные скорости можно получить с источником постоянной частоты, создав машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — число полюсов (которое должно быть четное число). Данную железную раму можно намотать для любого из нескольких возможных чисел пар полюсов, используя катушки, которые охватывают угол приблизительно (360/ р )°. Крутящий момент, доступный от корпуса машины, останется неизменным, так как он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
Синхронные двигатели | Двигатели переменного тока
Однофазные синхронные двигатели
Однофазные синхронные двигатели доступны в небольших размерах для приложений, требующих точной синхронизации, таких как хронометраж (часы) и магнитофоны. Хотя кварцевые часы с батарейным питанием широко доступны, часы с питанием от сети переменного тока имеют лучшую долгосрочную точность — в течение нескольких месяцев.
Это связано с тем, что операторы электростанций намеренно поддерживают долговременную точность частоты системы распределения переменного тока. Если он отстанет на несколько циклов, они восполнят потерянные циклы переменного тока, так что часы не потеряют время.
Большие и малые синхронные двигатели
Мощность свыше 10 л.с. (10 кВт) более высокий КПД и лучший коэффициент мощности делают большие синхронные двигатели полезными в промышленности. Большие синхронные двигатели на несколько процентов более эффективны, чем более распространенные асинхронные двигатели, хотя синхронный двигатель более сложен.
Так как двигатели и генераторы похожи по конструкции, должна быть возможность использовать генератор в качестве двигателя и, наоборот, использовать двигатель в качестве генератора.
Асинхронный двигатель похож на генератор переменного тока с вращающимся полем. На рисунке ниже показаны небольшие генераторы переменного тока с вращающимся полем постоянного магнита. На приведенном ниже рисунке могут быть либо два параллельно включенных и синхронизированных генератора переменного тока, приводимых в действие механическими источниками энергии, либо генератор переменного тока, приводящий в движение синхронный двигатель. Или это могут быть два мотора, если будет подключен внешний источник питания.
Дело в том, что в любом случае роторы должны работать с одинаковой номинальной частотой и находиться в фазе друг с другом. То есть их должно быть синхронизировано . Процедура синхронизации двух генераторов состоит в том, чтобы (1) разомкнуть выключатель, (2) запустить оба генератора с одинаковой частотой вращения, (3) опережать или замедлять фазу одного генератора до тех пор, пока оба выхода переменного тока не совпадут по фазе, (4) замкнуть переключатель до того, как они сдвинутся по фазе.
После синхронизации генераторы будут заблокированы друг относительно друга, и потребуется значительный крутящий момент, чтобы отделить один блок (рассинхронизироваться) от другого.
Синхронный двигатель работает синхронно с генератором
Учет крутящего момента синхронных двигателей
Если к ротору одного из вышеперечисленных вращающихся генераторов приложен больший крутящий момент в направлении вращения, угол ротора будет увеличиваться. (противоположное (3)) по отношению к магнитному полю в катушках статора, все еще синхронизированных, и ротор будет передавать энергию в линию переменного тока, как генератор переменного тока.
Ротор также будет сдвинут относительно ротора другого генератора. Если к одному из вышеперечисленных устройств приложена нагрузка, такая как тормоз, угол ротора будет отставать от поля статора, как в (3), извлекая энергию из линии переменного тока, как двигатель.
При чрезмерном крутящем моменте или сопротивлении ротор превысит максимальный угол крутящего момента опережения или отставания настолько, что синхронизация будет потеряна.
Крутящий момент развивается только при сохранении синхронизации двигателя.Разгон синхронных двигателей до скорости
В случае использования небольшого синхронного двигателя вместо генератора переменного тока нет необходимости выполнять сложную процедуру синхронизации генераторов переменного тока. Однако синхронный двигатель не запускается самостоятельно, и его необходимо довести до приблизительной электрической скорости генератора, прежде чем он заблокируется (синхронизируется) со скоростью вращения генератора.
После набора скорости синхронный двигатель будет поддерживать синхронность с источником питания переменного тока и развивать крутящий момент.
Синусоидальный двигатель синхронного двигателя в то время как верхняя южная катушка притягивает северный полюс этого ротора. Аналогичным образом южный полюс ротора отталкивается верхней южной катушкой и притягивается к нижней северной катушке.
К тому времени, когда синусоида достигает пика в точке (2), крутящий момент, удерживающий северный полюс ротора в верхнем положении, достигает максимума.
Этот крутящий момент уменьшается по мере того, как синусоида уменьшается до 0 В постоянного тока в точке (3) при минимальном крутящем моменте.Когда синусоида меняется на отрицательную между (3 и 4), нижняя южная катушка толкает южный полюс ротора, притягивая при этом северный полюс ротора. Аналогичным образом северный полюс ротора отталкивается верхней северной катушкой и притягивается к нижней южной катушке. В (4) синусоида достигает отрицательного пика с удерживающим моментом снова на максимуме. Когда синусоида меняется с отрицательной на 0 В постоянного тока на положительную, процесс повторяется для нового цикла синусоиды.
Обратите внимание: на приведенном выше рисунке показано положение ротора при отсутствии нагрузки (α=0°). На практике нагрузка на ротор приводит к тому, что ротор отстает от положения, показанного углом α. Этот угол увеличивается с нагрузкой до тех пор, пока максимальный крутящий момент двигателя не будет достигнут при α=90°.
Синхронизация и крутящий момент теряются за пределами этого угла.
Ток в катушках однофазного синхронного двигателя пульсирует при изменении полярности.Если скорость ротора с постоянными магнитами близка к частоте этого чередования, он синхронизируется с этим чередованием. Поскольку поле катушки пульсирует и не вращается, необходимо довести скорость ротора с постоянными магнитами до нужной скорости с помощью вспомогательного двигателя. Это небольшой асинхронный двигатель, подобный тем, что описаны в следующем разделе.
Добавление полюсов возбуждения снижает скорость
2-полюсный (пара полюсов север-юг минут) генератор генерирует синусоиду 60 Гц при вращении со скоростью 3600 об/мин. 3600 об/мин соответствует 60 оборотам в секунду. Аналогичный двухполюсный синхронный двигатель с постоянными магнитами также будет вращаться со скоростью 3600 об/мин.
Двигатель с меньшей скоростью может быть сконструирован путем добавления большего количества пар полюсов. 4-полюсный двигатель будет вращаться со скоростью 1800 об/мин, 12-полюсный — со скоростью 600 об/мин.
Показанный стиль конструкции (рисунок выше) приведен для иллюстрации. Синхронные двигатели с многополюсным статором с более высоким КПД и большим крутящим моментом фактически имеют несколько полюсов в роторе.Однообмоточный 12-полюсный синхронный двигатель
Вместо того, чтобы наматывать 12 катушек для 12-полюсного двигателя, намотайте одну катушку с двенадцатью встречно-штыревыми стальными полюсами, как показано на рисунке выше. Хотя полярность катушки меняется из-за приложенного переменного тока, предположим, что верхняя часть временно находится на севере, а нижняя — на юге.
Полюсные наконечники направляют южный поток снизу и снаружи катушки вверх. Эти 6 южных чередуются с 6 южными выступами, отогнутыми вверх от вершины стального полюсного наконечника катушки. Таким образом, стержень ротора с постоянным магнитом столкнется с 6-полюсными парами, соответствующими 6 циклам переменного тока за один физический оборот стержневого магнита.
Скорость вращения будет составлять 1/6 от электрической скорости переменного тока. Скорость ротора будет составлять 1/6 скорости вращения 2-полюсного синхронного двигателя. Пример: 60 Гц будет вращать 2-полюсный двигатель со скоростью 3600 об/мин или 600 об/мин для 12-полюсного двигателя.
Перепечатано с разрешения Westclox History на сайте www.clockHistory.com. Конструкция аналогична предыдущей фигуре с одной катушкой. Конструкция с одной катушкой экономична для двигателей с низким крутящим моментом. Этот двигатель со скоростью вращения 600 об/мин приводит в движение редукторы, двигающие стрелки часов.
В: Если бы двигатель Westclox работал со скоростью 600 об/мин от источника питания с частотой 50 Гц, сколько полюсов потребовалось бы?
A: 10-полюсный двигатель будет иметь 5 пар полюсов север-юг. Он будет вращаться со скоростью 50/5 = 10 оборотов в секунду или 600 об/мин (10 с-1 х 60 с/мин).
Перепечатано с разрешения Westclox History на сайте www.
clockHistory.com Ротор (рисунок выше) состоит из стержня с постоянными магнитами и стальной чашки асинхронного двигателя. Стержень синхронного двигателя, вращающийся внутри лепестков полюса, сохраняет точное время. Чашка асинхронного двигателя снаружи стержневого магнита устанавливается снаружи и над выступами для самостоятельного запуска. Одно время выпускались несамозапускающиеся двигатели без асинхронного двигателя.
Трехфазные синхронные двигатели
Трехфазный синхронный двигатель, как показано на рисунке ниже, создает электрически вращающееся поле в статоре. Такие двигатели не запускаются самостоятельно, если они запускаются от источника питания с фиксированной частотой, такой как 50 или 60 Гц, как в промышленных условиях.
Кроме того, ротор представляет собой не постоянный магнит для двигателей мощностью несколько лошадиных сил (мультикиловатт), используемых в промышленности, а электромагнит. Большие промышленные синхронные двигатели более эффективны, чем асинхронные двигатели.
Они используются, когда требуется постоянная скорость. Имея опережающий коэффициент мощности, они могут скорректировать линию переменного тока на отстающий коэффициент мощности.Три фазы возбуждения статора векторно складываются для создания единого результирующего магнитного поля, которое вращается f/2n раз в секунду, где f — частота сети питания, 50 или 60 Гц для промышленных двигателей, работающих от сети питания. Количество полюсов равно n. Для скорости ротора в об/мин умножьте на 60.
S = f120/n, где: S = частота вращения ротора в об/мин f = частота сети переменного тока n = количество полюсов на фазу мощности или 1500 об/мин при мощности 50 Гц. Если катушки запитываются по одной в последовательности φ-1, φ-2, φ-3, то ротор должен поочередно указывать на соответствующие полюса.
Поскольку синусоидальные волны на самом деле перекрываются, результирующее поле будет вращаться не ступенчато, а плавно. Например, когда синусоидальные волны φ-1 и φ-2 совпадают, пик поля будет направлен между этими полюсами.
Показанный стержневой магнитный ротор подходит только для небольших двигателей. Ротор с несколькими магнитными полюсами (внизу справа) используется в любом эффективном двигателе, приводящем в движение значительную нагрузку. Это будут электромагниты с токосъемными кольцами в больших промышленных двигателях. Крупные промышленные синхронные двигатели запускаются автоматически с помощью встроенных в якорь проводников с короткозамкнутым ротором, действующих как асинхронный двигатель.
На электромагнитный якорь подается питание только после того, как скорость вращения ротора будет близка к синхронной.
Трехфазный 4-полюсный синхронный двигатель
Малые многофазные синхронные двигатели . Многофазные управляющие сигналы генерируются электронными схемами и будут прямоугольными во всех приложениях, кроме самых требовательных.
Такие двигатели известны как бесщеточные двигатели постоянного тока. Истинные синхронные двигатели управляются синусоидальными сигналами.
Можно использовать двух- или трехфазный привод, поставив соответствующее количество обмоток в статоре. Выше показано только 3 фазы. Электронный синхронный двигатель
На блок-схеме показана электроника привода, связанная с низковольтным (12 В пост. тока) синхронным двигателем. Эти двигатели имеют датчик положения встроен в двигатель, который обеспечивает низкоуровневый сигнал с частотой, пропорциональной скорости вращения двигателя.
Датчик положения может быть таким же простым, как полупроводниковые датчики магнитного поля, такие как устройства на эффекте Холла , обеспечивающие синхронизацию коммутации (направление тока якоря) с электроникой привода. Датчик положения может быть угловым датчиком с высоким разрешением, например резольвером, индуктосином (магнитным энкодером) или оптическим энкодером.
Если требуется постоянная и точная скорость вращения, (как для дисковода) могут быть включены тахометр и фазовая автоподстройка частоты (рисунок ниже).
Этот сигнал тахометра, последовательность импульсов, пропорциональная скорости двигателя, подается обратно в контур фазовой автоподстройки частоты, который сравнивает частоту и фазу тахометра со стабильным источником опорной частоты, таким как кварцевый генератор. Контур фазовой автоподстройки частоты управляет скоростью синхронного двигателя
Бесщеточный двигатель постоянного тока
Двигатель, приводимый в действие прямоугольными волнами тока, который обеспечивается простыми датчиками на эффекте Холла, известен как бесщеточный двигатель постоянного тока . Этот тип двигателя имеет большее изменение пульсаций крутящего момента в зависимости от оборота вала, чем двигатель с синусоидальным приводом. Для многих приложений это не проблема. Хотя в этом разделе нас в первую очередь интересуют синхронные двигатели.
Пульсирующий крутящий момент двигателя и механический аналог
Пульсирующий крутящий момент или зубчатое зацепление вызывается магнитным притяжением полюсов ротора к полюсным наконечникам статора.
(Рисунок выше) Обратите внимание, что катушки статора отсутствуют. Ротор PM можно вращать вручную, но он будет испытывать притяжение к полюсным наконечникам, когда находится рядом с ними. Это аналогично механической ситуации. Будет ли пульсация крутящего момента проблемой для двигателя, используемого в магнитофоне? Да, мы не хотим, чтобы двигатель попеременно ускорялся и замедлялся, когда он перемещает аудиоленту мимо головки воспроизведения ленты. Будет ли пульсация крутящего момента проблемой для двигателя вентилятора? №
Обмотки, распределенные по ремню, создают более синусоидальное поле
генерируются ли сигналы возбуждения электронными средствами. Синхронный двигатель будет генерировать синусоидальную обратную ЭДС , если магнитное поле статора имеет синусоидальное распределение.
Будет более синусоидальным, если полюсные обмотки будут распределены в ленте по многим пазам, а не сосредоточены на одном большом полюсе (как показано на большинстве наших упрощенных иллюстраций).
Такая компоновка подавляет многие нечетные гармоники поля статора. Пазы с меньшим количеством витков на краю фазной обмотки могут находиться в одном пространстве с другими фазами. Намоточные ремни могут иметь альтернативную концентрическую форму, как показано на рисунке ниже.
Концентрические ремни
Для двухфазного двигателя, приводимого в движение синусоидой, крутящий момент остается постоянным на протяжении всего оборота по тригонометрическому тождеству:
9 sin2θ + cos2θ = 1
Генерация и синхронизация сигнала привода требуют более точной индикации положения ротора, чем обеспечивают датчики Холла, используемые в бесщеточных двигателях постоянного тока. А 9Резольвер 0005 или оптический или магнитный энкодер обеспечивают разрешение от сотен до тысяч частей (импульсов) на оборот.
Резольвер выдает аналоговые сигналы углового положения в виде сигналов, пропорциональных синусу и косинусу угла вала.
Энкодеры обеспечивают цифровую индикацию углового положения в последовательном или параллельном формате.Привод синусоидальной волны на самом деле может быть от ШИМ, широтно-импульсного модулятора , высокоэффективного метода аппроксимации синусоидальной волны цифровой формой волны. Для каждой фазы требуется электроника привода для этой формы волны, сдвинутая по фазе на соответствующую величину для каждой фазы.
ШИМ приближается к синусоиде
Преимущества синхронного двигателя
КПД синхронного двигателя выше, чем у асинхронных двигателей. Синхронный двигатель также может быть меньше, особенно если в роторе используются постоянные магниты высокой энергии. Появление современной твердотельной электроники позволяет управлять этими двигателями с переменной скоростью.
Асинхронные двигатели в основном используются на железнодорожной тяге. Однако небольшой синхронный двигатель, устанавливаемый внутри ведущего колеса, делает его привлекательным для таких применений.
высокотемпературная сверхпроводящая версия этого двигателя составляет от одной пятой до одной трети веса двигателя с медной обмоткой.Крупнейший экспериментальный сверхпроводящий синхронный двигатель, способный привести в движение корабль класса морского эсминца. Во всех этих применениях электропривод с регулируемой скоростью необходим. Привод с регулируемой скоростью также должен снижать напряжение привода на низкой скорости из-за уменьшения индуктивного сопротивления на более низкой частоте.
Для развития максимального крутящего момента ротор должен отставать от направления поля статора на 90°. Более того, он теряет синхронизацию. Гораздо меньше приводит к снижению крутящего момента. Таким образом, положение ротора должно быть точно известно. А положение ротора по отношению к полю статора необходимо рассчитывать и контролировать.
Этот тип управления известен как векторное фазовое управление . Он реализован с помощью быстрого микропроцессора, управляющего широтно-импульсным модулятором фаз статора.
 Таким образом, ротор будет продолжать вращаться.
Таким образом, ротор будет продолжать вращаться. Поскольку этот двигатель имеет больше обмоток, чем асинхронный двигатель с короткозамкнутым ротором, его также называют асинхронным двигателем с фазным ротором.
Поскольку этот двигатель имеет больше обмоток, чем асинхронный двигатель с короткозамкнутым ротором, его также называют асинхронным двигателем с фазным ротором.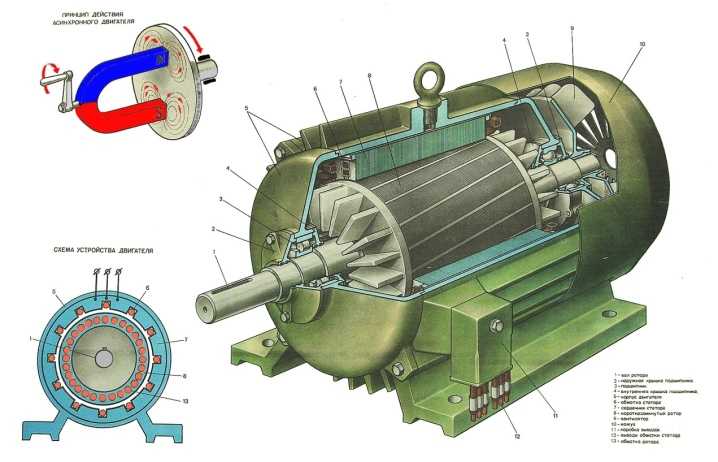
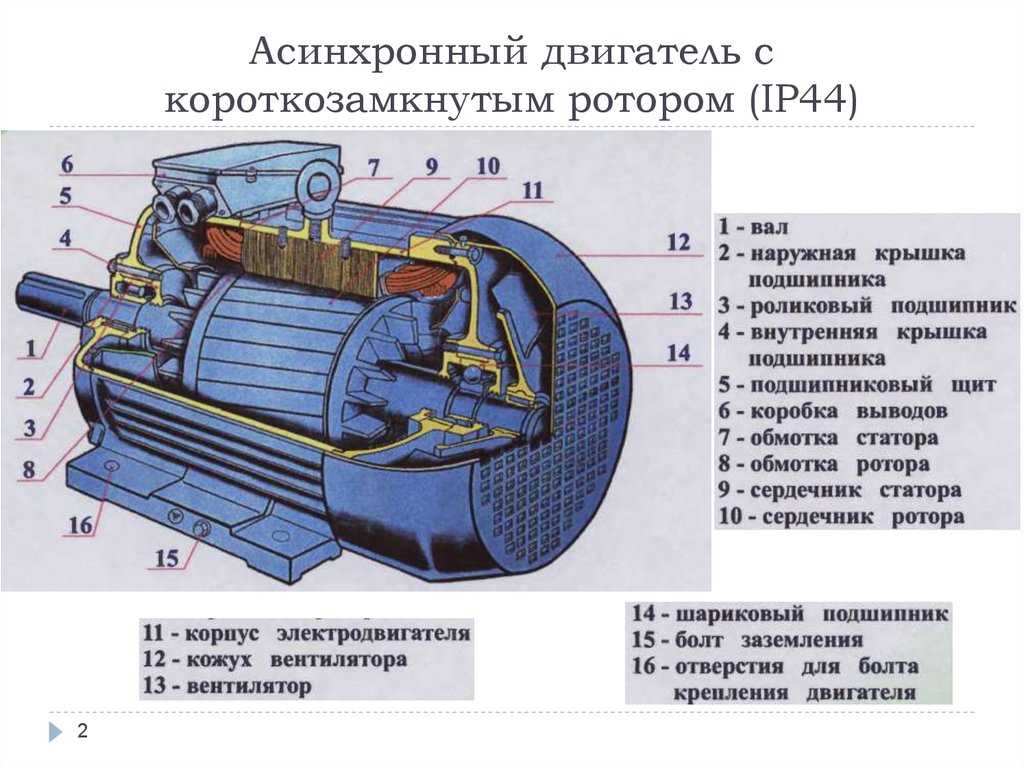 Двигатели постоянного тока нуждаются в двойном возбуждении для вращения, одно к статору, а другое к ротору. Но в этих двигателях нам нужно дать его только статору, что делает его уникальным. Как следует из названия, принцип работы этого двигателя основан на индукции. Давайте выполним ряд шагов, которые происходят при вращении этого двигателя:
Двигатели постоянного тока нуждаются в двойном возбуждении для вращения, одно к статору, а другое к ротору. Но в этих двигателях нам нужно дать его только статору, что делает его уникальным. Как следует из названия, принцип работы этого двигателя основан на индукции. Давайте выполним ряд шагов, которые происходят при вращении этого двигателя:
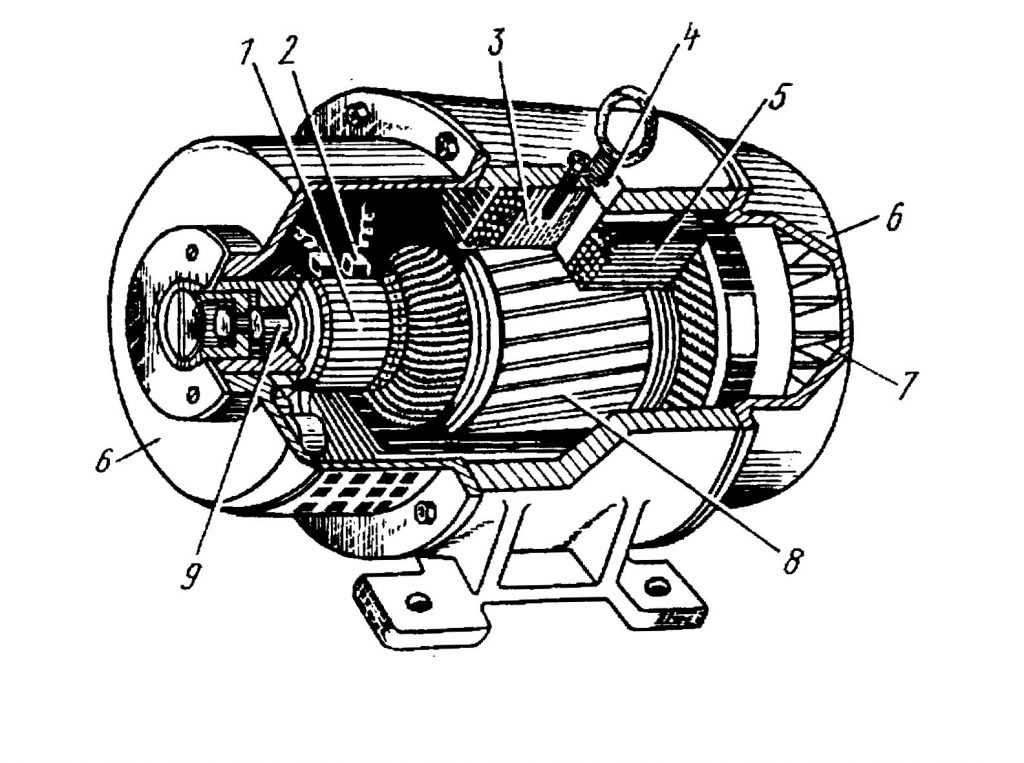
 все СМИ
все СМИ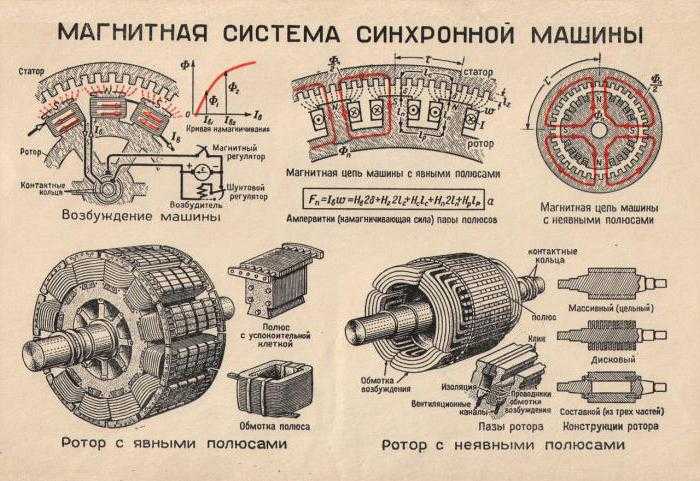 Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую периода позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую периода позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.