Содержание
Сила тяги реактивного (ракетного) двигателя
Тяга
– равнодействующая всех реактивных
сил, создаваемых агрегатами двигателя,
определяется по формуле:
где
– массовый секундный расход топлива
реактивного двигателя;Wa
– скорость газовой струи на срезе сопла;
Fa
– площадь среза сопла; ра
– давление на срезе сопла; рh
– давление
окружающей среды.
Первый
член данного уравнения характеризует
тягу, создаваемую за счет отбрасывания
от сопла газов и эта часть – реактивная
сила (статическая составляющая).
Второй
член характеризует тягу, которая
определяется разностью давлений на
срезе сопла и давления окружающей среды
и эта часть – переменная составляющая
реактивной тяги (зависит от высоты
полета).
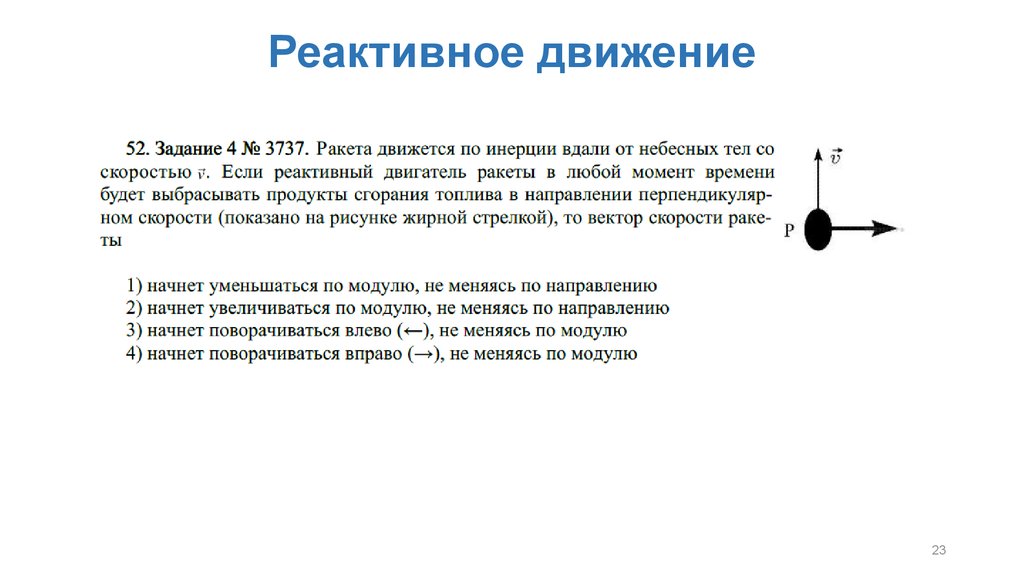
Реактивный момент
Пусть
есть ракета с однокамерной двигательной
установкой (ДУ) рис.29:
а) Если
вектор тяги двигателя Р
направлена вдоль оси, то реактивный
момент отсутствует (рис. 29,а).
29,а).
б) Если
вектор тяги (и результирующий вектор
тяги для многокамерной ДУ) действует с
некоторым эксцентриситетом относительно
центра тяжести (рис. 29,б),
то в этом случае действует реактивный
момент
.
Рис.29
Аэродинамические схемы ла
Планером
называется конструкция, объединяющая
корпус, крылья, органы управления и
стабилизации в единую аэродинамическую
схему. Он предназначен для создания
управляющих сил и размещения всей
аппаратуры ракеты. Корпус планера обычно
цилиндрической формы, за исключением
ракеты типа «несущий конус», с конической
(сферической) головной частью. Форма
корпуса и головной части выбирается в
целях получения наименьшей силы лобового
сопротивления ракеты при полете.
Материалом для корпуса служат легкие
прочные металлы и сплавы
Аэродинамические
поверхности планера служат для создания
подъемной и управляющих сил. Подъемная
сила, которая возникает при взаимодействии
ракеты с воздухом во время ее полета,
обеспечивает удержание ЛА в воздухе.
Управляющие силы необходимы для изменения
направления полета ракеты.
Различают
подвижные и неподвижные аэродинамические
поверхности (АП). Подвижные АП,
предназначенные для управления полетом
и стабилизацией ЛА, называются рулями,
поворотными крыльями. Свои функции они
выполняют путем поворота вокруг осей,
перпендикулярных продольной оси корпуса
ракеты, либо при выдвижении из корпуса
на определенное время и в определенной
последовательности.
Неподвижные
АП служат для стабилизации полета ЛА
(стабилизаторы) и для создания подъемной
силы (несущие крылья, поверхности). По
взаимному расположению рулей и неподвижных
аэродинамических поверхностей можно
выделить следующие аэродинамические
схемы ракет (рис.30):
—
нормальная или обычная;
—
«утка»;
—
«бесхвостка»;
—
«поворотное крыло»;
В
нормальной схеме рули и стабилизатор
располагаются позади крыльев в хвостовой
части ракеты.
Схема
«бесхвостка». Данная схема является
разновидностью нормальной схемы. Здесь
Здесь
крылья выполняют одновременно функции
крыльев и стабилизаторов и отличаются
большей стреловидностью и малым размахом.
С целью увеличения подъемной силы в
этой схеме увеличена площадь крыльев.
При этом рули оказываются расположенными
непосредственно за крыльями и связываются
с ними конструктивно.
В
аэродинамической схеме «утка» рули
находятся в головной части ракеты
(впереди центра масс), а крылья, выполняющие
и функцию стабилизатора, расположены
в хвостовой части корпуса ракеты. Эта
схема удобна с точки зрения компоновки
ракеты, так как рулевые машинки могут
быть расположены близко к рулям. При
такой компоновке ракеты подъемная сила
рулей совпадает по направлению с
подъемной силой крыльев и корпуса.
Однако расположение рулей в носовой
части ракеты и возникновение скоса
воздушного потока при отклонении рулей
приводит к потере подъемной силы на
крыльях и возникновению значительных
моментов крена. Чтобы избежать «момента
косой обдувки» крыльевой блок делается
вращающимся вокруг оси ракеты, что
позволяет избежать воздействия скоса
воздушного потока на них.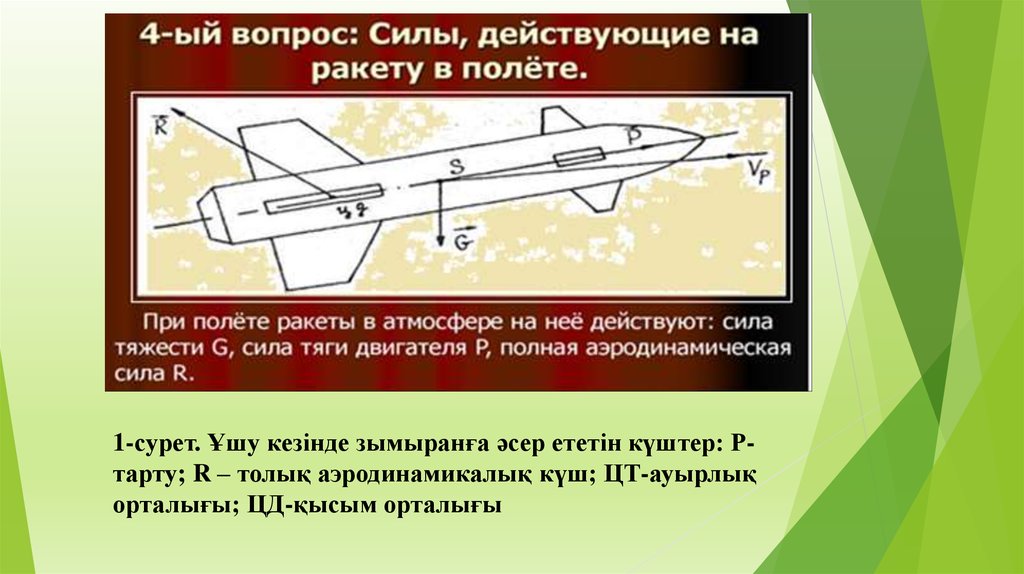
В схеме
«поворотное крыло» подвижные поверхности
(поворотные крылья) располагаются в
районе центра тяжести и наряду с функцией
крыла выполняют функцию рулей, а
неподвижные стабилизаторы расположены
в хвостовой части корпуса.
Рис.
30 Аэродинамические схемы: а)Нормальная;
б)»Бесхвостка»; в)»Утка»;
г)»Поворотное крыло».
Принципиально
не существует наилучшей аэродинамической
схемы. Выбор схемы аэродинамической
компоновки определяется требуемыми
высотами и дальностями полета ракеты,
маневренностью и составом бортовой
аппаратуры.
Таблица
Тяга — ракетный двигатель — Большая Энциклопедия Нефти и Газа, статья, страница 1
Cтраница 1
Тяга ракетного двигателя не зависит от скорости полета, лишь бы скорость истечения была постоянной.
[1]
УДЕЛЬНЫЙ ИМПУЛЬС тяги ракетного двигателя — отношение тяги РД к секундному массовому расходу рабочего тела. РД и рода топлива и является осн. УДЕЛЬНЫЙ ОБЪЕМ — величина v, равная отношению объема, занимаемого в-вом, к его массе: vtiV / um 1 / р, где dm — масса в-ва, заключенного в малом объемеdV, р — плотность в-ва.
УДЕЛЬНЫЙ ОБЪЕМ — величина v, равная отношению объема, занимаемого в-вом, к его массе: vtiV / um 1 / р, где dm — масса в-ва, заключенного в малом объемеdV, р — плотность в-ва.
[2]
Определим отношение начальной тяги ракетного двигателя к начальному весу самолета.
[3]
Определим далее отношение начальной тяги ракетного двигателя к начальному весу самолета.
[4]
Внешние действующие силы — это тяга ракетного двигателя, аэродинамическая и управляющая силы, сила притяжения, центробежная сила и силы Кориолиса. Эти силы изменяются в зависимости от условий окружающей среды. Летательному аппарату с ракетной силовой установкой свойственны очень высокие предельная и крейсерская скорости, независимо от того, представляет собой этот летательный аппарат самолет, ракету, снаряд, космический корабль или искусственный спутник. В период работы силовой установки или во время работы двигателя движение является динамическим. Поскольку многие параметры, включая управляющие силы, устойчивость, коэффициент подъема, коэффициент сопротивления, высоту, угол полета, время горения, уровень тяги и окружающую среду, обычно различны для каждого вида средств передвижения, общего решения быть не может. Скорость и высота, достигаемые вертикально подымающимися летательными аппаратами и ракетными двигателями, определяются из основных уравнений движения.
Поскольку многие параметры, включая управляющие силы, устойчивость, коэффициент подъема, коэффициент сопротивления, высоту, угол полета, время горения, уровень тяги и окружающую среду, обычно различны для каждого вида средств передвижения, общего решения быть не может. Скорость и высота, достигаемые вертикально подымающимися летательными аппаратами и ракетными двигателями, определяются из основных уравнений движения.
[5]
От каких факторов зависит сила тяги ракетного двигателя.
[6]
Между прочим, по этой формуле определяется тяга ракетного двигателя.
[7]
Из формулы (32.1) следует, что увеличение силы тяги ракетных двигателей теоретически можно получить различным путем: увеличивая либо площадь S выходного сечения, либо скорость истечения продуктов сгорания. Увеличение площади S выходного сечения приводит в то же время кг возрастанию силы сопротивления воздуха при движении ракеты через атмосферу и, следовательно, к торможению ракеты. Скорость истечения продуктов сгорания также не может быть увеличена беспредельно.
Скорость истечения продуктов сгорания также не может быть увеличена беспредельно.
[8]
Для управления полетом требуется изменять величину и направление вектора тяги ракетного двигателя. Изменение тяги по величине, или регулирование тяги, бывает желательным в разных пределах — от нескольких процентов для маршевых двигателей ускорителя до 1: 10 при посадке на Луну или другие планеты ( Рейнджер, лунный модуль КК Аполлон, ЖРД RL-10) и до 1: 100 при встрече и стыковке космических аппаратов. Управление вектором тяги позволяет изменять положение космического аппарата, создавая моменты по углам тангажа, рыскания и крена. Моменты, создаваемые по углу тангажа, поднимают или опускают нос аппарата, по углу рыскания поворачивают аппарат влево или вправо, по углу крена вызывают поворот относительно его продольной оси. В общем случае вектор тяги проходит через центр масс космического аппарата и направлен вдоль его оси, поэтому управление по каналам тангажа и рыскания можно осуществлять угловы.
[9]
Для управления полетом требуется изменять величину и направление вектора тяги ракетного двигателя. Изменение тяги по величине, или регулирование тяги, бывает желательным в разных пределах — от нескольких процентов для маршевых двигателей ускорителя до 1: 10 при посадке на Луну или другие планеты ( Рейнджер, лунный модуль КК Аполлон, ЖРД RL-10) и до 1: 100 при встрече и стыковке космических аппаратов. Управление вектором тяги позволяет изменять положение космического аппарата, создавая моменты по углам тангажа, рыскания и крена. Моменты, создаваемые по углу тангажа, поднимают или опускают нос аппарата, по углу рыскания поворачивают аппарат влево или вправо, по углу крена вызывают поворот относительно его продольной оси. В общем случае вектор тяги проходит через центр масс космического аппарата и направлен вдоль его оси, поэтому управление по каналам тангажа и рыскания можно осуществлять угловы.
[10]
Следует отметить, что хотя тяга ядерных ракетных двигателей невелика по сравнению с тягой химических ракетных двигателей, ядерный двигатель может работать в течение гораздо большего ( на много порядков) времени, чем ракетный двигатель с химическим топливом.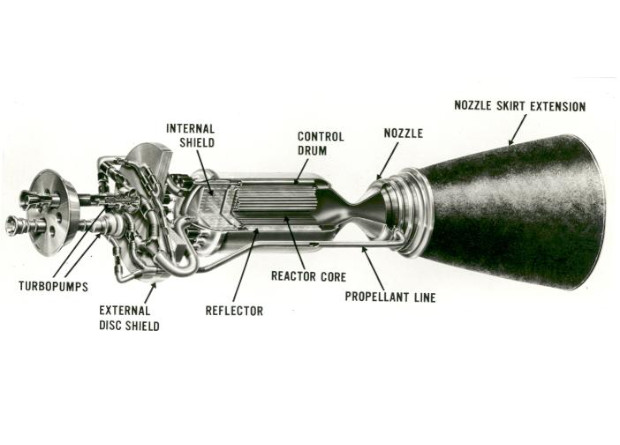 Поэтому ЯРД является весьма перспективным типом двигателя для управляемых межпланетных космических кораблей. Для старта такого корабля с Земли, по-видимому, должны быть использованы двигатели с химическим топливом, а ЯРД используется для полета за пределами земного притяжения.
Поэтому ЯРД является весьма перспективным типом двигателя для управляемых межпланетных космических кораблей. Для старта такого корабля с Земли, по-видимому, должны быть использованы двигатели с химическим топливом, а ЯРД используется для полета за пределами земного притяжения.
[11]
Практическая необходимость изучения течения с химическими реакциями в сопле связана с проведением точных расчетов тяги ракетного двигателя. Ракетный двигатель состоит из камеры для сжигания топлива с расположенным за ней соплом ( см. рис. 2), в котором горячие продукты горения разгоняются до высокой скорости. Важной характеристикой ракеты является удельный импульс Isp, представляющий собой импульс, полученный ракетой при истечении из сопла единицы массы. Желательно иметь такие топлива, для которых значения / sp велики. Следовательно, параметр потока vz представляет значительный практический интерес.
[12]
Это время кажется неправдоподобно большим, что указывает на практическую значимость полетов с оптимальным регулированием тяги ракетного двигателя.
[13]
Подсчитано, что 1 кг полезного груза, выведенного на орбиту искусственного спутника, требует 100 кг тяги ракетного двигателя. В результате, на каждый 1 кг спутника приходится несколько сот килограммов различных вспомогательных конструкций, горючего, окислителя и пр.
[14]
Как мы указывали [ см. формулу ( 32) ], при малых фо закон изменения массы, а следовательно, и закон программирования тяги ракетного двигателя определяется показательной функцией и зависит только от коэффициента Ка — совершенства самолета. При произвольных значениях фо закон изменения массы определяется проще всего графически.
[15]
Страницы:
1
2
Тяга это сила, которая перемещает Силы Все ракетные двигатели создают тягу за счет ускорения работающего В простейшем ракетном двигателе в качестве рабочего тела используется воздух. Модели ракет, Есть два основных типа химических ракетных двигателей; Новый тип ракетного двигателя — электродвигатель , также называемый Еще одним новым типом ракетного двигателя является Экскурсии с гидом
Деятельность: |



 Единственным пропеллентом является
Единственным пропеллентом является На этом слайде мы показываем схему ракетного двигателя. Величина тяги ракеты зависит Давление на выходе F = m точка * Ve + (pe — p0) * Ae Обратите внимание, что нет бесплатных Уравнение тяги, показанное выше, работает для обоих |