Содержание
Управление бесколлекторным двигателем по сигналам обратной ЭДС – понимание процесса / Хабр
Когда я начал разрабатывать блок управления бесколлекторным двигателем (мотор-колесом), было много вопросов о том, как сопоставить реальный двигатель с абстрактной схемой из трех обмоток и магнитов, на которой, как правило, все объясняют принцип управления бесколлекторными двигателями.
Когда я реализовал управление по датчикам Холла я еще не очень понимал, что происходит в двигателе дальше абстрактных трех обмоток и двух полюсов: почему 120 градусов и почему алгоритм управления именно такой.
Все встало на место, когда я начал разбираться в идее бездатчикового управления бесколлекторным двигателем — понимание процесса, происходящего в реальной железке, помогло разработать аппаратную часть и понять алгоритм управления.
Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока.
Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ.
Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления.
Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать.
Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока.
Синхронная машина
Синхронная машина управляется от трехфазной сети переменного тока. Двигатель имеет 3 электрические обмотки, смещенные между собой на 120 электрических градусов.
Запустив трехфазный двигатель в генераторном режиме, постоянным магнитным полем будет наводиться ЭДС на каждую из обмоток двигателя, обмотки двигателя распределены равномерно, на каждую из фаз будет наводиться синусоидальное напряжение и данные сигналы будут смещены между собой на 1/3 периода (рисунок 1).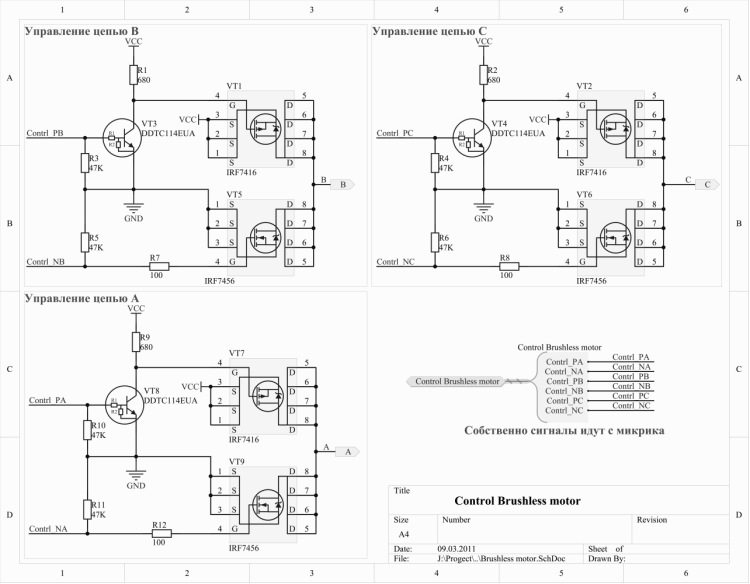 Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
При подаче на двигатель трехфазного напряжения в каждый момент времени на каждой обмотке будет некое значение силы тока.
Рисунок 1. Вид сигнала трехфазного источника переменного тока.
Каждая обмотка формирует вектор магнитного поля пропорциональный току на обмотке. Сложив 3 вектора можно получить результирующий вектор магнитного поля. Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.
Рисунок 2. Один электрический период трехфазного двигателя.
Один электрический период трехфазного двигателя.
На рисунке 2 изображен один электрический период трехфазного двигателя, на данном периоде обозначено 3 произвольных момента, чтобы построить в каждом из этих моментов вектора магнитного поля отложим данный период, 360 электрических градусов, на окружности. Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).
Рисунок 3. Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Вдоль каждой из фаз построен вектор магнитного поля, создаваемый обмоткой двигателя. Направление вектора определяется направлением постоянного тока в обмотке, если напряжение, прикладываемое к обмотке положительно, то вектор направлен в противоположную сторону от обмотки, если отрицательное, то вдоль обмотки. Величина вектора пропорциональна величине напряжения на фазе в данный момент.
Чтобы получить результирующий вектор магнитного поля необходимо сложить данные вектора по закону сложения векторов.
Аналогично построение для второго и третьего моментов времени.
Рисунок 4. Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Так, с течение времени, результирующий вектор плавно меняет свое направление, на рисунке 5 изображены получившиеся вектора и изображен полный поворот магнитного поля статора за один электрический период.
Рисунок 5. Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя.
За этим вектором электрического магнитного поля увлекается магнитное поле постоянных магнитов ротора в каждый момент времени (рисунок 6).
Рисунок 6. Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором.
Так работает синхронная машина переменного тока.
Имея источник постоянного тока необходимо самостоятельно формировать один электрический период со сменой направлений тока на трех обмотках двигателя. Поскольку бесколлекторный двигатель по конструкции такой же, как синхронный, в генераторном режиме имеет идентичные параметры, необходимо отталкиваться от рисунка 5, где изображено сформированное вращающееся магнитное поле.
Постоянное напряжение
Источник постоянного тока имеет только 2 провода «плюс питания» и «минус питания» это значит, что есть возможность подавать напряжение только на две из трех обмоток. Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Число перестановок из множества 3 равняется 6, следовательно, имеется 6 вариантов подключения обмоток.
Изобразим возможные варианты коммутаций и выделим последовательность, при которой вектор будет шаг за шагом проворачиваться далее пока не дойдет до конца периода и не начнет сначала.
Электрический период будем отсчитывать от первого вектора.
Рисунок 7. Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток.
На рисунке 5 видно, что при управлении трехфазным синусоидальным напряжением имеется множество векторов плавно проворачивающихся с течением времени, а при коммутации постоянным током возможно получить вращающееся поле только из 6 векторов, то есть переключение на следующий шаг должно происходить каждые 60 электрических градусов.
Результаты из рисунка 7 сведены в таблицу 1.
Таблица 1. Полученная последовательность коммутаций обмоток двигателя.
| Плюс питания | Минус питания | Обмотка не подключена |
| W | U | V |
| W | V | U |
| U | V | W |
| U | W | V |
| V | W | U |
| V | U | W |
Вид получившегося управляющего сигнала в соответствии с таблицей 1 изображен на рисунке 8. Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Рисунок 8. Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза W, синий – U, красный – V.
Однако реальная картина с фаз двигателя будет похожа на синусоидальный сигнал из рисунка 1. У сигнала образуется трапециевидная форма, так как в моменты, когда обмотка двигателя не подключена, постоянные магниты ротора наводят на нее ЭДС (рисунок 9).
Рисунок 9. Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме.
На осциллографе это выглядит так:
Рисунок 10. Вид окна осциллографа при измерении одной фазы двигателя.
Конструктивные особенности
Как было сказано ранее за 6 переключений обмоток формируется один электрический период 360 электрических градусов.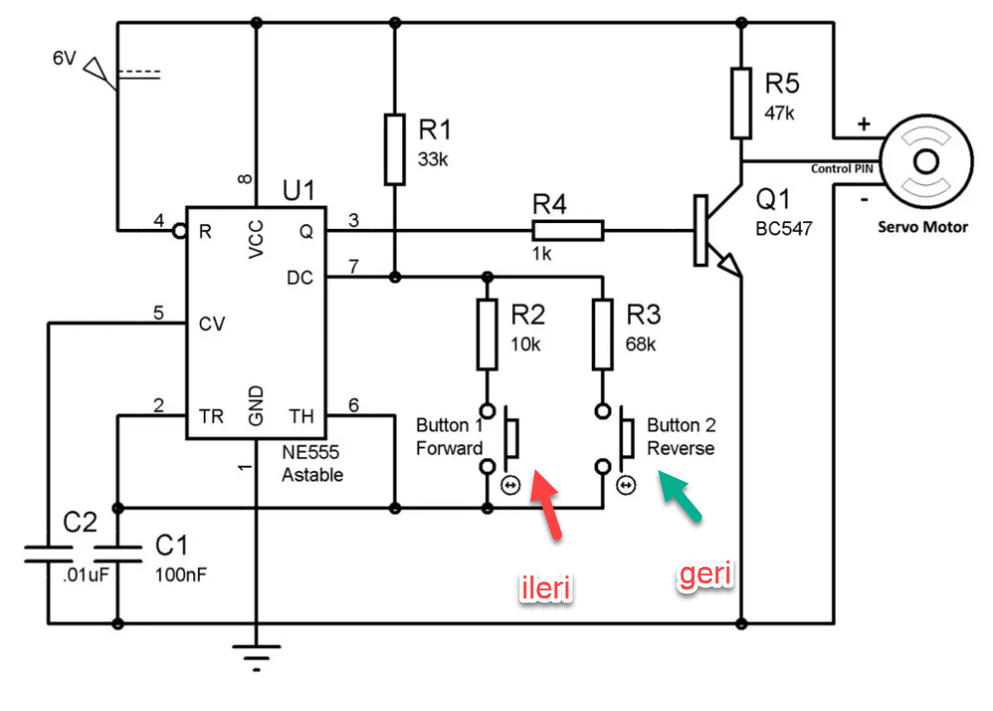
Необходимо связать данный период с реальным углом вращения ротора. Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
На рисунке 11 изображены модели двигателя с одной парой полюсов и с двумя парами полюсов.
а. б.
Рисунок 11. Модель двигателя с одной (a) и с двумя (б) парами полюсов.
Двигатель с двумя парами полюсов имеет 6 обмоток, каждая из обмоток парная, каждая группа из 3 обмоток смещена между собой на 120 электрических градусов. На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12, исходя из данных таблицы 1, изображены вектора для одной и двух пар полюсов.
а. б.
Рисунок 12. Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б) парами полюсов.
На рисунке 13 изображены вектора, созданные 6 коммутациями обмоток двигателя с одной парой полюсов. Ротор состоит из постоянных магнитов, за 6 шагов ротор провернется на 360 механических градусов.
На рисунке обозначены конечные положения ротора, в промежутках между двумя соседними положениями ротор проворачивается от предыдущего к следующему скоммутированному состоянию. Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.
Рисунок 13. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с одной парой полюсов.
В двигателях с N парами полюсов необходимо пройти N электрических периодов для полного механического оборота.
Двигатель с двумя парами полюсов будет иметь два магнита с полюсами S и N, и 6 обмоток (рисунок 14). Каждая группа из 3 обмотки смещены друг относительно друга на 120 электрических градусов.
Рисунок 14. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с двумя парами полюсов.
Определение положения ротора бесколлекторного двигателя
Как было сказано ранее для работы двигателя необходимо в нужные моменты времени подключать напряжение на нужные обмотки статора. Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Отслеживание положения ротора возможно несколькими способами:
1. По датчикам Холла
2. По обратной ЭДС
Как правило, датчиками Холла производители оснащают двигатель при выпуске, поэтому это самый распространённый метод управления.
Коммутирование обмоток в соответствии с сигналами обратной ЭДС позволяет отказаться от датчиков встроенных в двигатель и использовать в качестве датчика анализ свободной фазы двигателя, на которую будет наводиться магнитным полем противо-ЭДС.
Управление бесколлекторным двигателем с датчиками Холла
Чтобы коммутировать обмотки в нужные моменты времени необходимо отслеживать положение ротора в электрических градусах. Для этого применяются датчики Холла.
Поскольку имеется 6 состояний вектора магнитного поля необходимо 3 датчика Холла, которые будут представлять один абсолютный датчик положения с трехбитным выходом.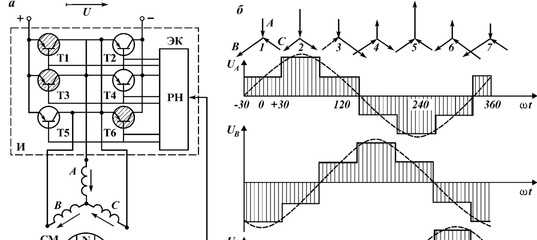 Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.
Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.
Рисунок 15. Сигналы с датчиков Холла за один электрический оборот двигателя.
Для вращения двигателя необходимо чтобы магнитное поле статора опережало магнитное поле ротора, положение, когда вектор магнитного поля ротора сонаправлен с вектором магнитного поля статора является конечным для данной коммутации, именно в этот момент должно происходить переключение на следующую комбинацию, чтобы не давать ротору зависать в стационарном положении.
Cопоставим сигналы с датчиков Холла с комбинацией фаз которые необходимо скоммутировать (таблица 2)
Таблица 2. Сопоставление сигналов датчиков Холла с коммутацией фаз двигателя.
| Положение двигателя | HU(1) | HV(2) | HW(3) | U | V | W |
| 0 | 0 | 0 | 1 | 0 | — | + |
| 1 | 0 | 1 | + | — | 0 | |
| 1 | 0 | 0 | + | 0 | — | |
| 1 | 1 | 0 | 0 | + | — | |
| 0 | 1 | 0 | — | + | 0 | |
| 360/N | 0 | 1 | 1 | — | 0 | + |
При равномерном вращении двигателя с датчиков поступает сигнал смещенный на 1/6 периода, 60 электрических градусов (рисунок 16).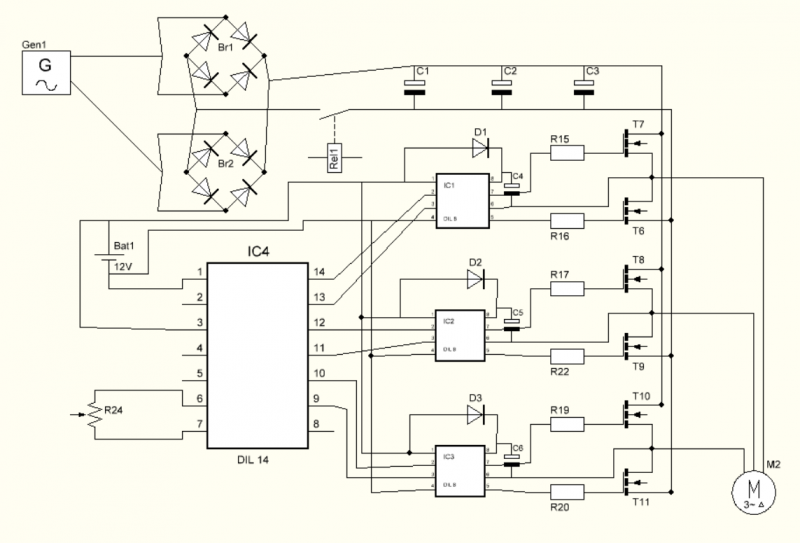
Рисунок 16. Вид сигнала с датчиков Холла.
Управление с помощью сигнала обратной ЭДС
Существуют бесколлекторный двигатели без датчиков положения. Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).
Рисунок 17. Изменение напряжения на фазе двигателя.
Сигнал с обмотки двигателя разбит на 4 момента:
1. Обмотка подключена к 0
2. Обмотка не подключена (свободная фаза)
3. Обмотка подключена к питающему напряжению
4. Обмотка не подключена (свободная фаза)
Сопоставив сигнал с фаз с управляющим сигналом, видно, что момент перехода на следующее состояние можно детектировать пересечением средней точки (половины питающего напряжения) с фазой, которая в данный момент не подключена (рисунок 18).
Рисунок 18. Сопоставление управляющего сигнала с сигналом на фазах двигателя.
После детектирования пересечения необходимо выдержать паузу и включать следующее состояние. По данному рисунку составлен алгоритм переключений состояний обмоток (таблица 3).
Таблица 3. Алгоритм переключения обмоток двигателя
| Текущее состояние | U | V | W | Следующее состояние |
| 1 | — | Ожидание пересечения средней точки из + в — | + | 2 |
| 2 | Ожидание пересечения средней точки из — в + | — | + | 3 |
| 3 | + | — | Ожидание пересечения средней точки из + в — | 4 |
| 4 | + | Ожидание пересечения средней точки из — в + | — | 5 |
| 5 | Ожидание пересечения средней точки из + в — | + | — | 6 |
| 6 | — | + | Ожидание пересечения средней точки из — в + | 1 |
Пересечение средней точки проще всего детектировать компаратором, на один вход компаратора подается напряжение средней точки, а на второй текущее напряжение фазы.
Рисунок 19. Детектирование средней точки компаратором.
Компаратор срабатывает в момент перехода напряжения через среднюю точку и генерирует сигнал для микроконтроллера.
Обработка сигнала с фаз двигателя
Однако сигнал с фаз при регулировании скорости ШИМ отличается видом, и имеет импульсный характер (рисунок 21), в таком сигнале невозможно детектировать пересечение со средней точкой.
Рисунок 20. Вид сигнала фазы при регулировании скорости ШИМ.
Поэтому данный сигнал следует отфильтровать RC фильтром чтобы получить огибающую, а так же разделить под требования компаратора. По мере увеличения скважности шим сигнал будет возрастать по амплитуде (рисунок 22).
Рисунок 21. Схема делителя и фильтра сигнала с фазы двигателя.
Рисунок 22. Огибающая сигнала при изменении скважности ШИМ.
Схема со средней точкой
Рисунок 23. Вид виртуальная средней точки. Картинка взята с avislab.com/
С фаз снимаются сигналы через токограничительные резисторы и объединяются, получается вот такая картина:
Рисунок 24. Вид осциллограммы напряжения виртуальной средней точки.
Из-за ШИМ, напряжение средней точки не постоянно, сигнал так же необходимо фильтровать. Напряжение средней точки после сглаживания будет достаточно большим (в районе питающего напряжения двигателя), его необходимо разделить делителем напряжения до значения половины питающего напряжения.
После прохождения сигнала через фильтр колебания сглаживается и получается ровное напряжение относительно которого можно детектировать пересечение обратной ЭДС.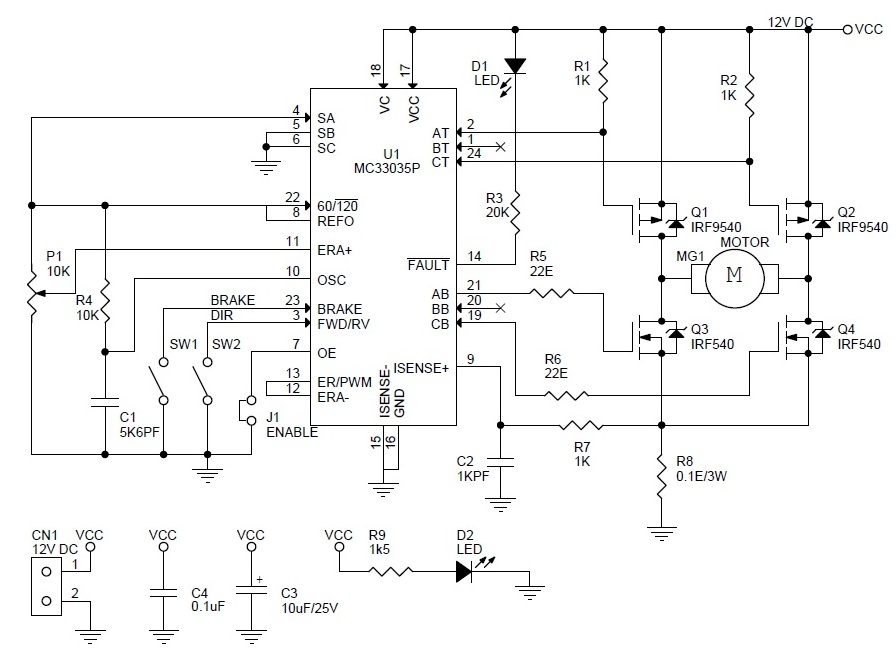
Рисунок 26. Напряжение после делителя и фильтра низких частот.
Средняя точка будет менять свое значение в зависимости от напряжения (скважности ШИМ), так же как и огибающая сигнала.
Полученные сигналы с компараторов заводятся на микроконтроллер, который их обрабатывает по алгоритму выше.
Пока на этом все.
Управление бесколлекторным двигателем схема
Данная статья сфокусирована на применении микроконтроллера с минимальными ресурсами для управления вентильным двигателем и скорости его вращения. Как микроконтроллер может управлять трехфазным БДПТ двигателем? Для того, чтобы ответить на этот вопрос требуется, чтобы были определены ресурсы микросхемы, которые в данном приложении будут взаимодействовать с внешней топологией и функциями управления двигателя БДПТ. Существуют сенсорные и безсенсорные конфигурации двигателей для определения положения ротора , которые имеют свои за и против.
Поиск данных по Вашему запросу:
Управление бесколлекторным двигателем схема
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Бесколлекторный двигатель постоянного тока
- Блок управления бесколлекторным двигателем BLSD
- Контроллер трехфазного бесколлекторного двигателя постоянного тока с минимальными ресурсами
- Бесколлекторный электродвигатель — что это такое?
- Драйверы от TI: Управляй любым электродвигателем
- Драйверы от TI: Управляй любым электродвигателем
- Бесколлекторные двигатели со встроенным блоком управления FL42BLS-IE
- Что такое бесколлекторный двигатель постоянного тока и его принцип работы
- Управление бесколлекторными двигателями
- AVR492: Управление бесколлекторным электродвигателем постоянного тока с помощью AT90PWM3
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Мотор колесо & СИНУС. Пример для STM32
Пример для STM32
Бесколлекторный двигатель постоянного тока
Бесколлекторные моторы рис. При этом конструкция двигателя проще, в ней нет щеточного узла, который постоянно трется с ротором и создает искры. Поэтому они практически не изнашиваются.
Двигатели inrunner имеют расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор. Двигатели outrunner имеют неподвижные обмотки, внутри двигателя, вокруг которых вращается корпус с помещенными на его внутреннюю стенку постоянными магнитами.
Коммутация в бесколлекторном двигателе БД осуществляется и контролируется с помощью электроники. Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору.
Для передачи энергии контроллер использует MOSFETы — силовые ключи, которые могут открываться и закрываться за долю секунды.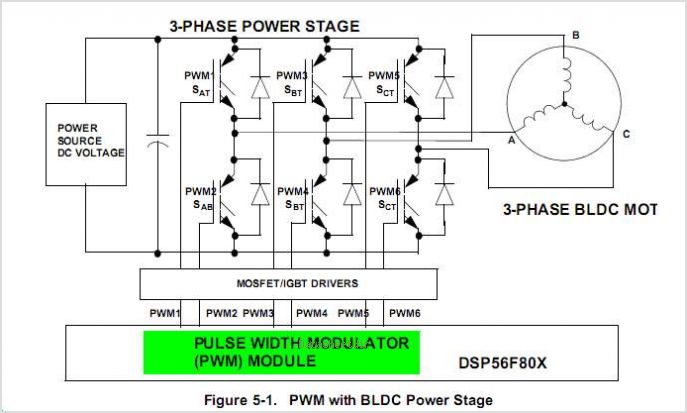 Если мощности одного ключа недостаточно, используется несколько ключей, включенных параллельно. За переключением фаз следит микроконтроллер регулятора.
Если мощности одного ключа недостаточно, используется несколько ключей, включенных параллельно. За переключением фаз следит микроконтроллер регулятора.
Функциональная схема ESC регулятора показана на рис. Схема подключения бесколлекторного двигателя с ESC-регулятором к плате Arduino показана на рис.
Для подключения регулятора к плате Arduino используется 2 провода:. Подключение бесколлекторного двигателя с ESC-регулятором к плате Arduino. Для управления регулятором будем использовать Arduino-библиотеку Servo. Минимальные и максимальные значения управляющего сигнала мксек и мксек. После загрузки скетча на плату Arduino видим что мотор не запускается и не реагирует на повороты потенциометра. Регулятор необходимо откалибровать, чтобы он знал минимальные и максимальное значения.
Для этого перед подачей питания на регулятор, выставляем потенциометр в максимальное значение. Подаем питание. Слышим «пиканье» двигателя. Переводим потенциометр в минимальное значение, слышим 3 «пика».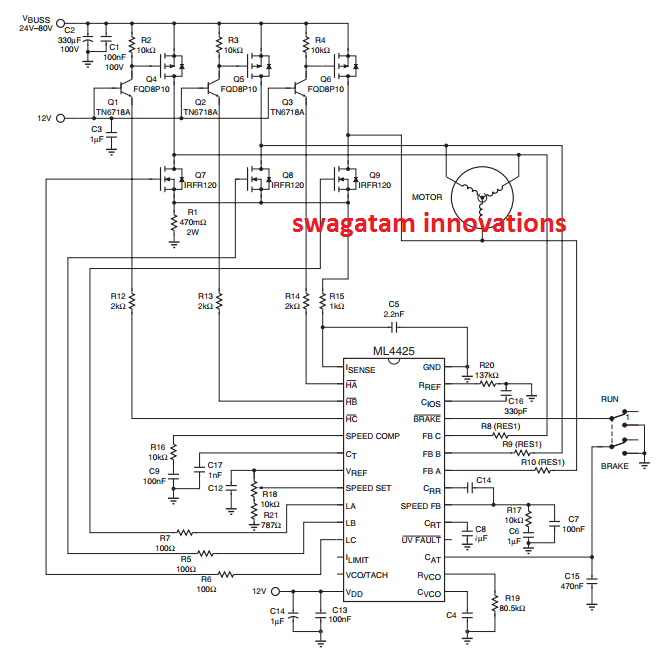 Регулятор откалиброван. Теперь поворотом потенциометра можем регулировать скорость двигателя. В качестве примера настроим автоматическую калибровку ESC-регулятора при запуске скетча Arduino.
Регулятор откалиброван. Теперь поворотом потенциометра можем регулировать скорость двигателя. В качестве примера настроим автоматическую калибровку ESC-регулятора при запуске скетча Arduino.
Нам потребуются следующие компоненты:. Для калибровки в процедуре setup производим эмуляцию перевода потенциометра м максимальное и минимальное положение. Содержимое скетча показано в листинге 2. После запуска Arduino в процедуре setup происходит калибровка регулятора, и в процедуре loop мотор крутится со скоростью, соответствующей положению потенциометра. База знаний. Вконтакте Instagram YouTube. Бесколлекторные моторы. Обзор бесколлекторных двигателей, подключение и пример использования одного из них.
К сожалению, раздел пуст В данный момент нет активных товаров. Содержание Обзор Подключение к Arduino Пример использования Часто задаваемые вопросы Обзор бесколлекторных моторов для Arduino Бесколлекторные моторы рис.
ESC регуляторы Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору. Для подключения регулятора к плате Arduino используется 2 провода: черный — «земля; белый — управляющий. Показания потенциометра будем использовать для управления скоростью мотора. Подключение бесколлекторного двигателя с ESC-регулятором к плате Arduino Для управления регулятором будем использовать Arduino-библиотеку Servo.
Для подключения регулятора к плате Arduino используется 2 провода: черный — «земля; белый — управляющий. Показания потенциометра будем использовать для управления скоростью мотора. Подключение бесколлекторного двигателя с ESC-регулятором к плате Arduino Для управления регулятором будем использовать Arduino-библиотеку Servo.
Содержимое скетча представлено в листинге 1. Листинг 1. Пример использования В качестве примера настроим автоматическую калибровку ESC-регулятора при запуске скетча Arduino. Листинг 2. Часто задаваемые вопросы 1. Проведите калибровку ESC-регулятора. Назад к списку Следующий проект. Услуги 3D печать Ремонт 3D принтеров. Блог 3D-печать 3D-принтеры.
Контакты Как до нас добраться.
Блок управления бесколлекторным двигателем BLSD
Преимущества бесколлекторных двигателей по сравнению с бензиновыми двигателями. Бесколлекторный двигатель также имеет и другие названия вентильный электродвигатель или шпиндельный электродвигатель. Данный тип двигателей был создан с целью улучшения свойств коллекторных электродвигателей постоянного тока. Бесколлекторный двигатель объединяет в себе лучшие качества безконтактных двигателей и двигателей постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками.
Бесколлекторный двигатель объединяет в себе лучшие качества безконтактных двигателей и двигателей постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками.
Примером бесколлекторного двигателя-маховика постоянного тока, Так как напряжения датчиков Холла пропорциональны возбуждающему их току управления то Конструктивная схема двигателя-маховика показана на рис.
Контроллер трехфазного бесколлекторного двигателя постоянного тока с минимальными ресурсами
Бесколлекторные моторы рис. При этом конструкция двигателя проще, в ней нет щеточного узла, который постоянно трется с ротором и создает искры. Поэтому они практически не изнашиваются. Двигатели inrunner имеют расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор. Двигатели outrunner имеют неподвижные обмотки, внутри двигателя, вокруг которых вращается корпус с помещенными на его внутреннюю стенку постоянными магнитами.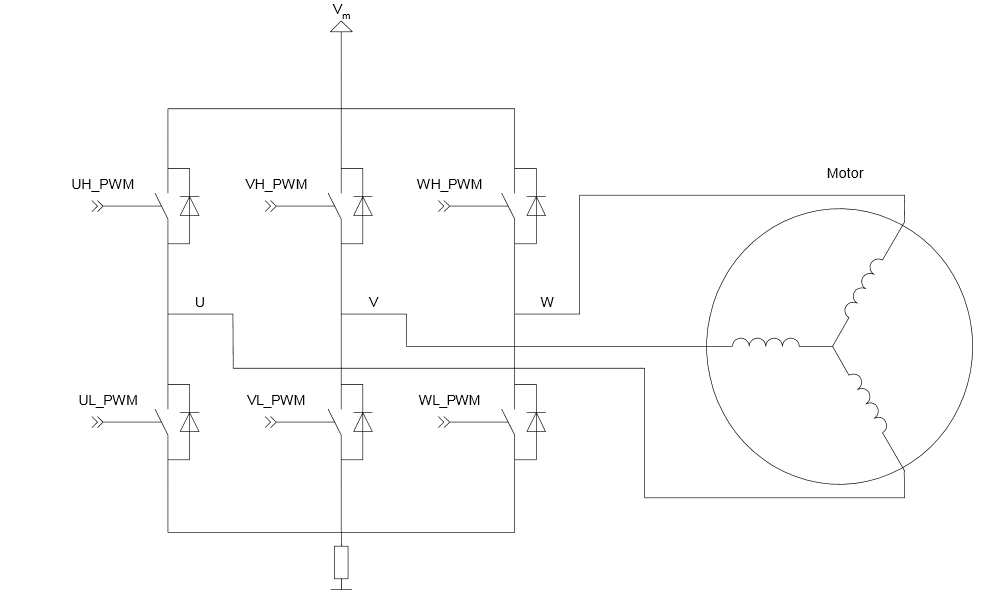 Коммутация в бесколлекторном двигателе БД осуществляется и контролируется с помощью электроники. Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору. Для передачи энергии контроллер использует MOSFETы — силовые ключи, которые могут открываться и закрываться за долю секунды. Если мощности одного ключа недостаточно, используется несколько ключей, включенных параллельно.
Коммутация в бесколлекторном двигателе БД осуществляется и контролируется с помощью электроники. Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору. Для передачи энергии контроллер использует MOSFETы — силовые ключи, которые могут открываться и закрываться за долю секунды. Если мощности одного ключа недостаточно, используется несколько ключей, включенных параллельно.
Бесколлекторный электродвигатель — что это такое?
Хочу им управлять с помощью ардуино. Но главное пока просто его запустить от розетки. У меня волосы дыбом встали когда я узнал что такое бесколлекторные надеюсь правильно написал двигатели и способы их управления. Это очень сложно, засим и прошу помощи. Думаю можно распаять заводскую схему управления кондиционером, но я не знаю вообще не шарю как.
На роторе бесколлекторного двигателя установлены постоянные магниты,.
Драйверы от TI: Управляй любым электродвигателем
Информацию о положении ротора электродвигателя можно передавать магнитным полем, используя для этого гальваномагнитные приборы, например магнитодиоды, или датчики Холла. Однако использование датчиков Холла приводит к усложнению конструкции электродвигателя, так как для формирования крутого фронта импульсов датчика положения датчики Холла должны быть расположены в специальном магнитопроводе с отдельным магнитом. Очень малкй к. Значительная зависимость параметров гальваномагнитных приборов от температуры резко уменьшает температурный диапазон работы электродвигателя. Тем не менее свойство датчиков Холла реагировать на знак и величину магнитного поля, на полярность питающего напряжения, а также практически неограниченное время работы определяют в некоторых случаях целесообразность их применения.
Однако использование датчиков Холла приводит к усложнению конструкции электродвигателя, так как для формирования крутого фронта импульсов датчика положения датчики Холла должны быть расположены в специальном магнитопроводе с отдельным магнитом. Очень малкй к. Значительная зависимость параметров гальваномагнитных приборов от температуры резко уменьшает температурный диапазон работы электродвигателя. Тем не менее свойство датчиков Холла реагировать на знак и величину магнитного поля, на полярность питающего напряжения, а также практически неограниченное время работы определяют в некоторых случаях целесообразность их применения.
Драйверы от TI: Управляй любым электродвигателем
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов — это далеко не полный перечень областей применения бесколлекторных двигателей БД постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки. Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2. Как видите, конструкция представляет собой ротор якорь и статор, на первом имеется постоянный магнит или несколько магнитов, расположенных в определенном порядке , а второй оборудован катушками В для создания магнитного поля. Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем именно такой тип конструкции можно увидеть на рисунке 2 , так и внешним см. Соответственно, каждая из конструкций имеет определенную сферу применения.
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2. Как видите, конструкция представляет собой ротор якорь и статор, на первом имеется постоянный магнит или несколько магнитов, расположенных в определенном порядке , а второй оборудован катушками В для создания магнитного поля. Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем именно такой тип конструкции можно увидеть на рисунке 2 , так и внешним см. Соответственно, каждая из конструкций имеет определенную сферу применения.
Brushless controller schematic mc Принципиальная Схема, Управление бесколлекторным двигателем постоянного тока(IR) Ардуино.
Бесколлекторные двигатели со встроенным блоком управления FL42BLS-IE
Управление бесколлекторным двигателем схема
Запросить склады. Перейти к новому. Управление бесколлекторным двигателем.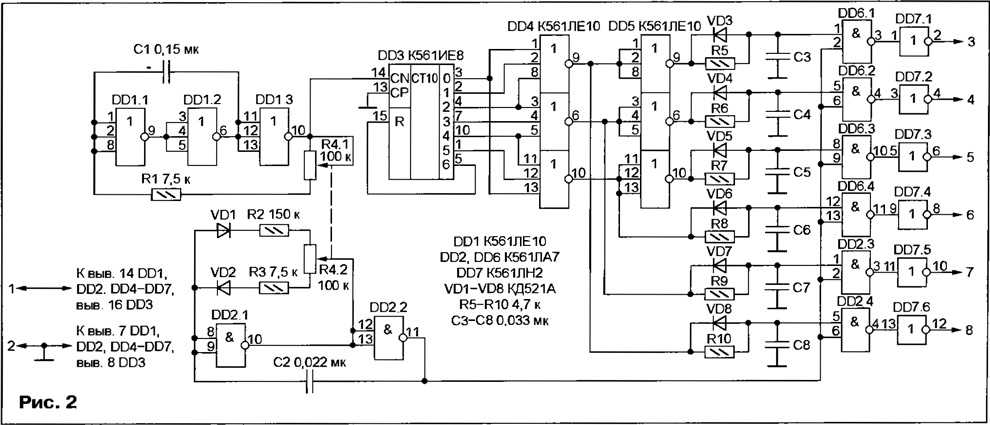
Что такое бесколлекторный двигатель постоянного тока и его принцип работы
ВИДЕО ПО ТЕМЕ: Бесколлекторный электродвигатель своими руками
Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора. Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока БДПТ эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера , за счет действия этой силы и образуется крутящий момент на валу электрических машин.
Двигателем постоянного тока называют электрический двигатель, питание которого обеспечивает постоянный ток.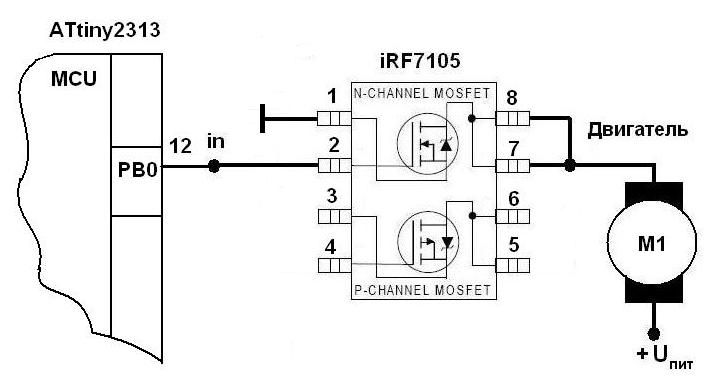 При необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами.
При необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами.
Управление бесколлекторными двигателями
Изобретение относится к бесколлекторным двигателям постоянного тока. Технический результат заключается в разработке схемы автоматического управления бесколлекторным двигателем, обеспечивающей режимы перестраиваемой стабилизированной скорости вращения двигателя и устойчивую его работу при запуске и колебаниях нагрузочного момента. Поставленная цель достигается тем, что в устройство автоматического управления двигателем, содержащее датчик положения ротора, регулятор длительности импульсов, электронный коммутатор и цепь обратной связи, в цепь обратной связи введены схема сравнения, формирователь напряжения установки, регулятор глубины обратной связи и интегратор, а выходы цепи обратной связи подсоединены к входам введенных в регулятор длительности импульсов компараторов, выходы которых через детекторы подключены к входам электронного коммутатора якорных обмоток двигателя. Изобретение относится к области средств автоматизации и робототехники и может быть использовано как в этих областях, так и в ряде других, где в качестве исполнительного элемента применяются управляемые бесколлекторные двигатели. Регистрация патентов.
Изобретение относится к области средств автоматизации и робототехники и может быть использовано как в этих областях, так и в ряде других, где в качестве исполнительного элемента применяются управляемые бесколлекторные двигатели. Регистрация патентов.
AVR492: Управление бесколлекторным электродвигателем постоянного тока с помощью AT90PWM3
Высокопроизводительное AVR-ядро микроконтроллера, которое содержит контроллер силового каскада, позволяет реализовать устройство управления высокоскоростным бесколлекторным электродвигателем постоянного тока. В данном документе дается короткое описание принципа действия бесколлекторного электродвигателя постоянного тока, а в деталях рассматривается управление БКЭПТ в сенсорном режиме, а также приводится описание принципиальной схемы опорной разработки ATAVRMC , на которой основаны данные рекомендации по применению. Обсуждается также программная реализация с программно-реализованным контуром управления на основе ПИД-регулятора.
(BLDC) Схема драйвера бесщеточного двигателя постоянного тока с использованием 555 IC
555 Timer ProjectsElectronics Circuits
AdminПоследнее обновление: 14 октября 2022 г.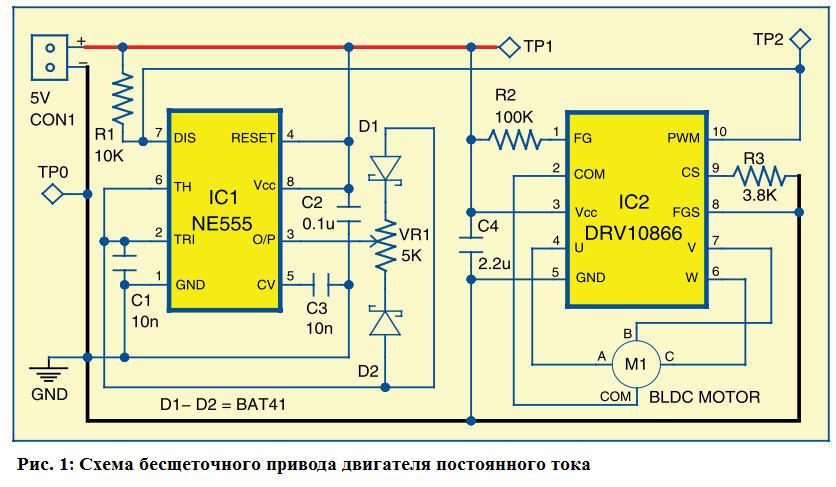
0 14 192 2 минуты чтения
СОДЕРЖАНИЕ
- 1 Обзор: безмолвная цепь двигателя постоянного тока с использованием 555 IC
- 2 Счел материалов
- 3 BLDC, бесщеточный DC Двигатель
- 4 DRV10866 IC
- 5 Без пустота DC Circuit
2
2
2
В этом проекте мы создадим BLDC, схему драйвера бесщеточного двигателя постоянного тока , используя 555 таймер IC и DRV10866 драйвер IC . Бесщеточные двигатели находят применение в компьютерной периферии, такой как дисководы, принтеры, ручные электроинструменты, самолеты, автомобили и дроны .
Блок управления BLDC обычно требует информацию о положении ротора для выбора подходящего угол коммутации .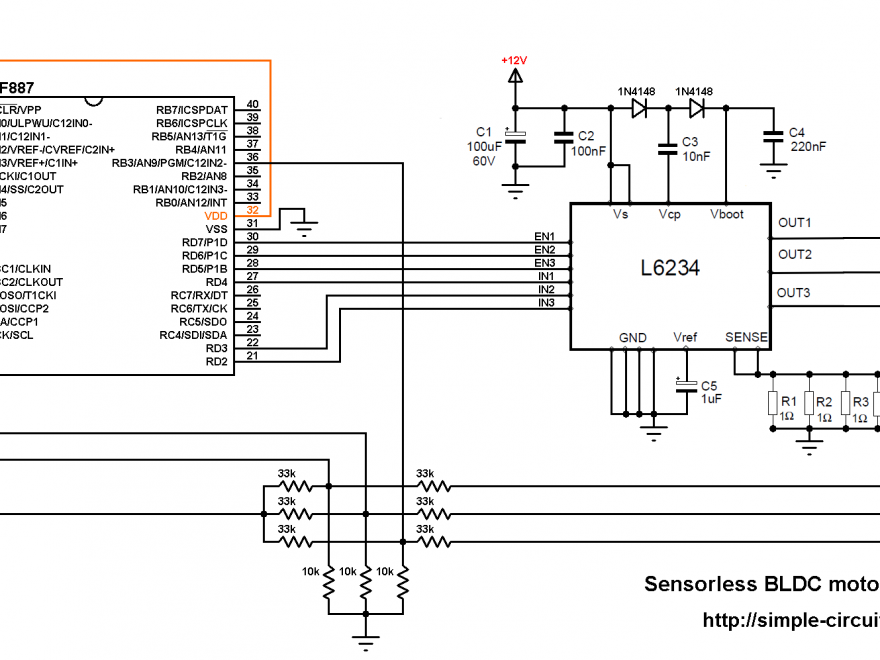 Итак, для этого мы используем Driver Circuit . В большинстве приложений используются датчики Холла , но здесь мы будем использовать схему на основе микросхемы таймера 555 и драйвера DRV10866 IC .
Итак, для этого мы используем Driver Circuit . В большинстве приложений используются датчики Холла , но здесь мы будем использовать схему на основе микросхемы таймера 555 и драйвера DRV10866 IC .
Спецификация
Ниже перечислены компоненты, необходимые для выполнения этого проекта. Все компоненты можно легко купить на Amazon.
| С.Н. | Компоненты | Описание | Количество |
|---|---|---|---|
| 1 | Резистор | 10 кОм | 1 |
| 2 | Резистор | 100 кОм | 1 |
| 3 | Резистор | 3,8 кОм | 1 |
| 4 | Переменный резистор | 5 кОм | 1 |
| 5 | Конденсатор | 10 нФ (керамический диск) | 2 |
| 6 | Конденсатор | 0,1 мкФ (керамический диск) | 1 |
| 7 | Конденсатор | 2,2 мкФ (керамический диск) | 1 |
| 8 | NE555 | 555 Таймер IC | 1 |
| 9 | BAT41 | Диод Шоттки | 2 |
| 10 | DRV10866 | DRV10866, 3-фазный двигатель BLDC | 1 |
| 11 | Блок питания 5 В | Батарея/адаптер постоянного тока | 1 |
BLDC, бесщеточный двигатель постоянного тока
A бесщеточный электродвигатель постоянного тока (двигатель постоянного тока или двигатель BL) представляют собой синхронные двигатели, питаемые от постоянного тока (постоянного тока) от электричества через импульсный инвертор или силовой инвертор источник , производящий электроэнергию в виде переменного тока (AC) для управления каждой фазой двигателя через контроллер с обратной связью .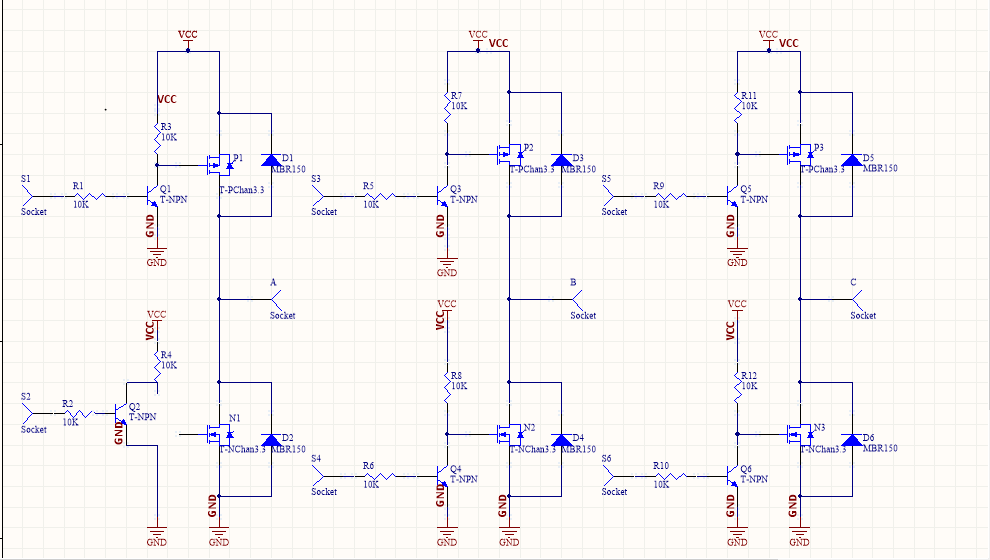 Контроллер подает импульсы тока на обмотки двигателя, которые управляют скоростью и крутящим моментом двигателя.
Контроллер подает импульсы тока на обмотки двигателя, которые управляют скоростью и крутящим моментом двигателя.
Преимущества бесщеточного двигателя по сравнению с щеточными заключаются в высоком соотношении мощности к весу, высокой скорости, электронном управлении и низких эксплуатационных расходах.
DRV10866 Драйвер IC
DRV10866 представляет собой трехфазный драйвер бездатчикового двигателя со встроенной мощностью МОП-транзисторов с допустимым током управления до 680 мА пик . DRV10866 специально разработан для малошумных приводов вентиляторов с малым количеством внешних компонентов . DRV10866 имеет встроенную защиту от перегрузки по току без необходимости использования внешнего токоизмерительного резистора.
Работает в диапазоне входного напряжения от 1,65 до 5,5 В .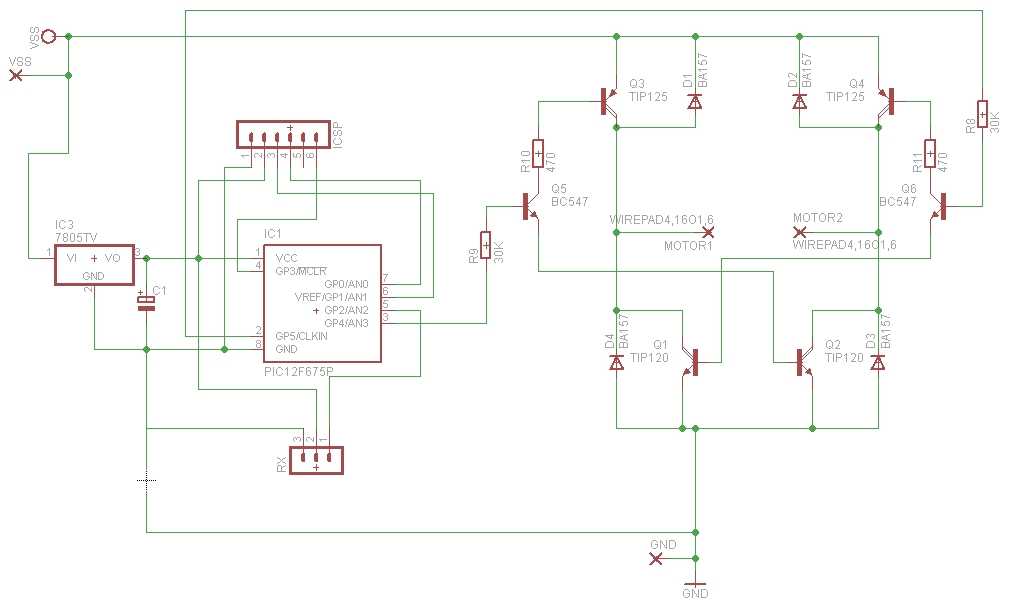 Он имеет очень продвинутые функции, такие как Обнаружение блокировки, защита от перенапряжения, UVLO, тепловое отключение и т. д.
Он имеет очень продвинутые функции, такие как Обнаружение блокировки, защита от перенапряжения, UVLO, тепловое отключение и т. д.
Схема драйвера бесщеточного двигателя постоянного тока
Схема для драйвера бесщеточного двигателя постоянного тока (BLDC) с использованием 555 IC и драйвера IC DRV10866. ниже.
Подтягивающий резистор 100k r используется на контакте 1 DRV10866. Затем мы подключаем контакты 2, 4, 7 и 6 DRV10866 к общей фазе A, фазе B и фазе C двигателя BLDC. Контакт 10 DRV10866 подключен к контакту 7 микросхемы таймера 555, чтобы получить p 9.0024 сигнал с широтно-импульсной модуляцией (ШИМ) сигнал от DRV10866. Это управляет скоростью двигателя BLDC.
Выходной сигнал (ШИМ) подается на контакт 7 микросхемы таймера 555. Чтобы отрегулировать сигнала ШИМ 25 кГц, вы можете настроить рабочий цикл с помощью потенциометра 5K. Рабочий цикл может варьироваться от 5% до 95%, который контролирует скорость двигателя BLDC.
Связанные статьи
Драйвер бесщеточного двигателя постоянного тока | BLDC двигатель
— Реклама —
Растет использование бесщеточных двигателей постоянного тока (BLDC). Но для их управления обычно требуется информация о положении ротора для выбора соответствующего угла коммутации. Обычно датчик Холла используется для определения положения ротора. Но в чувствительных к стоимости приложениях часто желательна схема коммутации без датчиков. Описанная здесь схема драйвера бесщеточного двигателя постоянного тока использует микросхему драйвера DRV10866 для управления небольшим вентилятором BLDC без использования каких-либо датчиков положения. Скорость вентилятора BLDC можно изменять плавно, без обычных шагов, связанных с обычным вентилятором переменного тока.
Схема драйвера бесколлекторного двигателя постоянного тока
На рис. 1 показана схема бессенсорного драйвера двигателя постоянного тока. Схема построена на NE555 (IC1), DRV10866 (IC2) и нескольких других компонентах.
Рис. 1: Схема драйвера бесщеточного двигателя постоянного тока Драйвер
DRV10866 IC от Texas Instruments используется для управления небольшим трехфазным бесщеточным двигателем постоянного тока (M1). Схема представляет собой трехфазный драйвер двигателя без датчика со встроенными силовыми полевыми МОП-транзисторами, обеспечивающими пиковый ток возбуждения до 680 мА. DRV10866 специально разработан для приводов вентиляторов с низким уровнем шума и малым количеством компонентов. Для управления трехфазным двигателем используется бессенсорная схема обратной ЭДС 150°.
— Реклама —
Подтягивающий резистор 100 кОм (R2) используется на выводе 1 микросхемы IC2. Контакты 2, 4, 7 и 6 IC2 подключены к общему проводу, фазе A, фазе B и фазе C двигателя BLDC соответственно. Контакт 10 IC2 подключен к контакту 7 IC1, чтобы получить сигнал с широтно-импульсной модуляцией (PWM) от IC1 для управления скоростью двигателя BLDC.
Выходной сигнал (ШИМ) поступает на контакт 7 (DIS) IC1, а не на обычный выходной контакт 3 IC. Рабочий цикл ШИМ-сигнала 25 кГц (прибл.) можно регулировать в диапазоне от 5% до 95% с помощью потенциометра VR1. Скоростью двигателя BLDC можно управлять, изменяя рабочий цикл ШИМ-сигнала. Поворот VR1 против часовой стрелки снижает рабочий цикл, что, в свою очередь, снижает скорость двигателя, и наоборот.
Конструкция и испытания
Односторонняя печатная плата для бесщеточного привода двигателя постоянного тока показана на рис. 2, а расположение компонентов — на рис. 3. Соберите схему на рекомендованной печатной плате, чтобы свести к минимуму ошибки сборки. IC2 должен быть установлен на стороне пайки печатной платы.
Рис. 2: Односторонняя печатная плата драйвера бесколлекторного двигателя постоянного токаРис. 3: Компоновка компонентов для печатной платы
Загрузите PDF-файлы с компоновкой печатной платы и компонентов: щелкните здесь
После сборки компонентов подключите источник питания 5 В постоянного тока к разъему CON1.