Содержание
Шаговый привод —
Новости
02.04.2019
Блок закачки и дозирования ингибитора коррозии на нефтяной платформе
Подробнее
28.02.2019
Установка дозирования гипохлорита натрия для Архангельского ЦБК
Подробнее
27.02.2019
Установка плавления и дозирования стеарина и олеина
Подробнее
26.08.2018
Поставка установок дозирования реагентов на «БОВ-3» ОАО «Славнефть-ЯНОС»
Подробнее
16.12.2015
Новое поколение цифровых дозировочных насосов SMART Digital
Подробнее
16.12.2015
Поставка оборудования для водоканала г. Череповца…
Подробнее
ЛЕНТА НОВОСТЕЙ
Рис. 1. Принципиальная схема шагового привода
1. Принципиальная схема шагового привода
Данный тип привода является одной из последних разработок в дозировочной технике. В данном приводе мембрана и шток жестко связанны с двигателем и ход мембраны контролируется двигателем в любой момент времени. Несмотря на то, что стоимость насосов с таким приводом несколько выше стоимости насосов с электромагнитным приводом, это полностью оправдывается дополнительными возможностями, которые позволяет реализовать шаговый двигатель.
У шагового двигателя существует возможность изменять скорость вращения в любой момент времени. Изменение производительности насоса осуществляется за счет изменения скорости вращения двигателя в цикле нагнетания. При этом длина хода мембраны и скорость всасывания остается постоянной. Это дает возможность при уменьшении производительности насоса существенно сужать зоны в которые не попал реагент, гарантируя при этом высокую точность дозирования и снижать вероятность завоздушивания дозировочной головки.
Рис. 2. Дозировочный насос с шаговым приводом в разрезе
Благодаря возможности изменения скорости вращения двигателя в широком диапазоне, данный тип привода позволяет изменять подачу от 100% до 0,1% (диапазон регулирования 1:1000) при сохранении постоянной высокой точности дозирования. При изменении значения подачи (например, при управлении от расходомера) или при изменении противодавления, насос не требует перекалибровки и сохраняет точность на уровне 1% автоматически компенсируя появившиеся отклонения.
К сожалению, насосы с таким типом привода недостаточно широко распространены на Российском рынке, но, тем не менее они начинают применяться все чаще в различных областях промышленности. Впервые, шаговый привод для дозировочных насосов применен компанией Grundfos.
При использовании шагового привода, мы получаем принципиальное отличие вида графика.
Шаговый привод всегда использует максимальную длину хода штока. Таким образом для насоса с шаговым приводом время задержки всегда равно нулю (Тзадержк = 0).
Рис. 3. Работа дозировочного насоса с шаговым приводом
Так как насос меняет скорость вращения электродвигателя только во время цикла нагнетания, время всасывания остается постоянным* (Твсас= const), а время нагнетания существенно увеличивается (Тнагн> ? ). Таким образом, с уменьшением производительности насоса, происходит все более равномерное распределение реагента в потоке (Тнагн >> Твсас+ Тзадержк).
*скорость всасывания может быть уменьшена при использовании функции для перекачивания высоковязких и загазованных жидкостей
Таким образом, при дозировании в поток, шаговый привод обеспечивает гораздо более равномерное распределение реагента в потоке.
Получить предложение на оборудование
2.
 Структурная схема контурной системы управления с шаговым приводом
Структурная схема контурной системы управления с шаговым приводом
Рис. Структурная схема контурной
системы управления с шаговым приводом
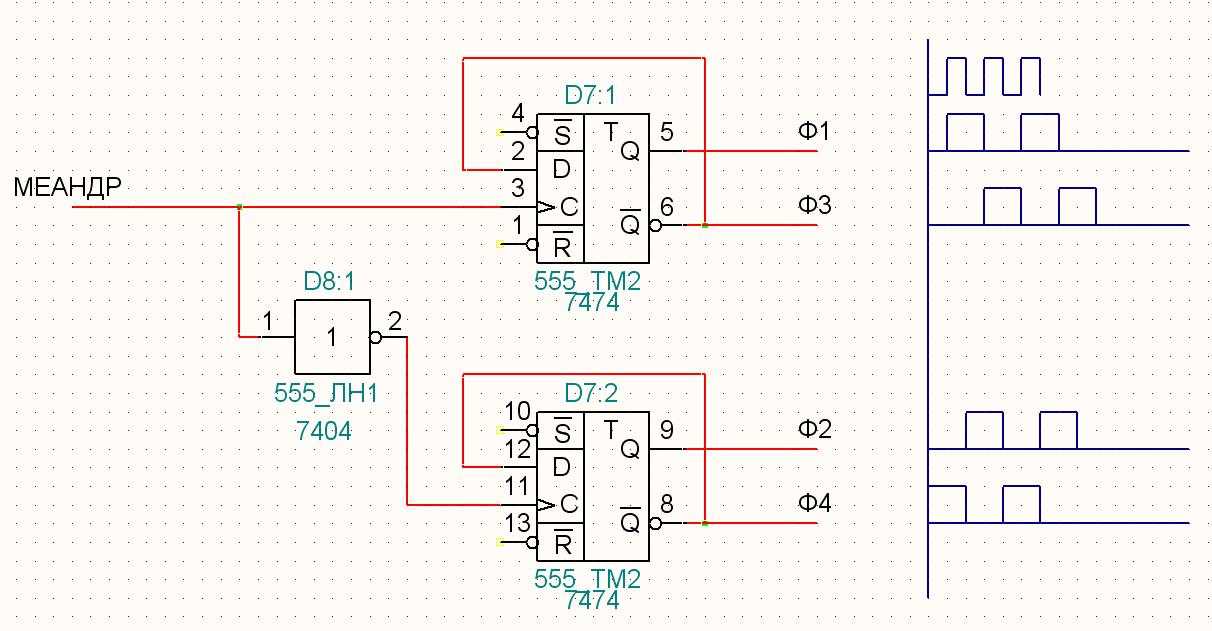
На вход шаговых двигателей поступают
электрические импульсы, вызывающие
повороты ротора.
Каждому импульсу на входе соответствует
определённый угол поворота ротора на
выходе, а частота следования импульсов
задает скорость вращения ротора шагового
двигателя. Эти двигатели выпускают с
шагом на валу в градусах: 1;
1,5; 3;
4; 5;
6.
Зависимость между шагом на валу и
разрешающей способностью системы
выражается соотношением:
,
где tn– шаг винта подачи.
Чтобы реализовать по каждой оси координат
требуемый закон перемещения, нужно
обеспечить определенный порядок
чередования импульсов. Если суммировать
величину перемещения по двум координатам
можно получить на плоскости любую
криволинейную траекторию. Технологические
Технологические
команды и размерная информация и
записываются на программоносителе.
Шаговые двигатели являются в основном
маломощными, поэтому для передачи
больших моментов применяют гидроусилители
крутящего момента.
3. Схема позиционной двухкоординатной системы управления станками
Рис. Структурная схема позиционной
двухкоординатной
Системы управления станками
Обратные связи обеспечиваются датчиками,
в которых имеются кодовые шкалы. Шкала
имеет участки двух разных качеств,
одному из которых присваивается значение
«1», а другому «0».
Состояние каждого элемента однозначно
определяется тем участком шкалы, с
которым данный элемент взаимодействует.
Состояние каждого считывающего элемента
однозначно определяется тем участком,
которому он соответствует. Каждому
дискретному значению датчика соответствует
своя кодовая комбинация. Шкала имеет
10 уровней квантования (или формирует
10 комбинаций).
Исходная информация записывается на
перфоленту. После считывания она
поступает в устройство управления (УУ).
Пусть требуется переместить исполнительный
орган (ИО), в определенном направлении,
на определенную величину:
устройство
управления выдаёт сигнал;посредством
привода начинают движение салазки
продольной подачи;устройство
обратной связи измеряет фактическое
положение салазок и информацию об этом
посылает в устройство управления.
Когда будет отработано перемещение,
заданное программой, произойдёт
совпадение кодовых комбинаций.
Исполнительный механизм остановится.
Произойдёт смена кадра и будет
отрабатываться новое перемещение.
4. Схема системы управления со следящим приводом (контурная)
Эта система является контурной.
В качестве приводов используются
асинхронные двигатели с фазным ротором.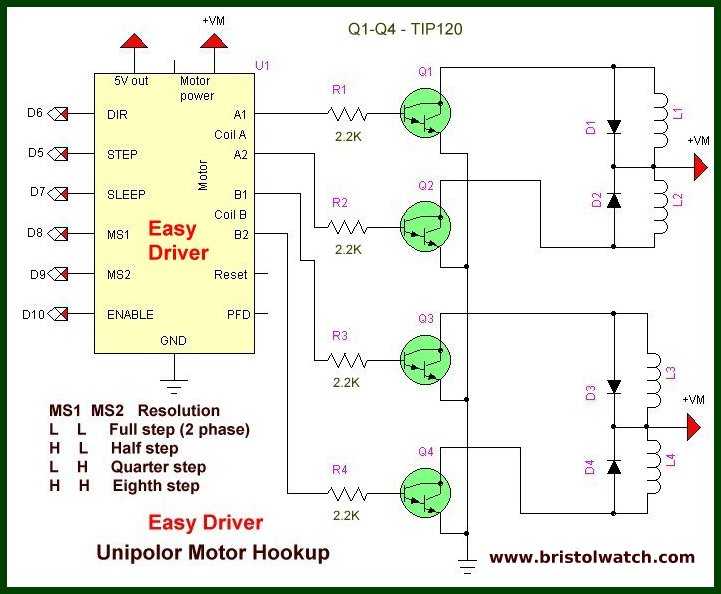
В цепи обратных связей включены различные
датчики, а именно вращающиеся трансформаторы
(ВТ),
вращающиеся индуктосины, линейные
индуктосины, опто-электронные
преобразователи.
Линейный индуктосин представляет
собой развернутый трансформатор,
сосотоящий из двух частей: линейки и
головки, в которых расположены линейные
обмотки со смещенным шагом.
Датчики обратных связей
устанавливаются на винтах и конечных
звеньях рабочих органов. Информация
от датчиков обрабатывается измерительными
устройствами и в виде сигналов обратной
связи поступает в устройство ЧПУ, в
котором сравнивается с заданной
прграммой.
Схема
устройства ЧПУ с программоносителем
в виде перфоленты
Устройство ЧПУ работает следующим
образом:
Перфолента 1, с записанной на ней
информацией на 8 дорожках устанавливается
в фотоэлектрическое считывающее
устройство (ФСУ). В процессе работы
перфолента протягивается на величину
1 кадра, и с неё считывается вся информация
со скоростью 200-300 строк в секунду. После
После
считывания информация передаётся вБЗУ(блок запоминающего устройства) строкой
считывания, где она заполняется в
соответствующих регистрах, количество
которых равно количеству строк в кадре.
После считывания всей информации
командойКВК(конец ввода кадра)ФСУостанавливается, и даётся команда на
передачу информации из регистровБЗУв интерполятор (И). Сигналы с выходов
интерполятора, в виде импульсов унитарного
кода передаются вЭФП(электронный
фазовый преобразователь), в котором
преобразуются в скачкообразное изменение
фазы переменного тока, которая затем
обрабатывается фазовым следящим
устройством (т.е. сигналы преобразуются
в смещение фазы). Сигналы с выходаЭФПв виде опорногоОСи рабочих
синусоидальных импульсовРСхиРСу,
подаются через соответствующие усилителиУсх, Усу и Усона фазовые приводы
подачиППхиППу.
Опорный
сигнал (ОС) формируется генератором
импульсов (ГИ).
Цепи привода шагового двигателя
A Цепи привода шагового двигателя обычно питаются от источника постоянного тока низкого напряжения. Когда фаза должна быть под напряжением, источник постоянного тока подключается к фазе с помощью полупроводникового переключателя S (рис. 8.9).
Фазный ток нарастает со скоростью, определяемой электрической постоянной времени фазной обмотки. Когда фаза должна быть обесточена, переключатель выключается, который передает ток на обратный диод D F . Ток падает до нуля, опять же со скоростью, определяемой постоянной времени фазной обмотки. Момент двигателя, который является функцией i ph , образуется и распадается одинаково. Чтобы максимизировать крутящий момент шагового двигателя, схемы привода шагового двигателя должны быть такими, чтобы ток нарастал и спадал как можно быстрее, в идеале, как показано пунктирными линиями на рис. 8.9(b). Это особенно важно, когда требуются высокие скорости шага, как показано на рис. 8.9(c). Схемы привода шагового двигателя разработаны с учетом этого требования.
8.9(c). Схемы привода шагового двигателя разработаны с учетом этого требования.
Униполярный привод для двигателей с переменным сопротивлением:
В случае двигателей с переменным реактивным сопротивлением необходимо только включить или выключить фазные токи, полярность тока не имеет значения. Достаточно униполярного привода, способного подавать ток только в одном направлении. Простая униполярная схема привода, подходящая для маломощного двухфазного двигателя с переменным сопротивлением, показана на рис. 8.10.
Когда переключатель S 1 замкнут, обмотка фазы А подключается к источнику постоянного тока V d и фазный ток нарастает, а при размыкании фазный ток спадает в цепи свободного хода, состоящей из фазы А, Д F и R F . Внешний резистор R E уменьшает электрическую постоянную времени, тем самым ускоряя нарастание тока. Величину внешнего резистора R E выбирают для фиксации значения электрической постоянной времени, а затем выбирают напряжение источника V d для получения номинального тока I R в фазной обмотке. Таким образом,
Таким образом,
, где R P — сопротивление фазной обмотки.
Во время включения переключателя фазный ток также протекает через внешний резистор R E , в результате чего большая часть энергии, получаемой от источника, рассеивается в R E . Кроме того, энергия, накопленная в индуктивности фазной обмотки в течение периода включения переключателя, полностью рассеивается в сопротивлениях цепи свободного хода, когда переключатель выключен. Из-за этих потерь энергии униполярная схема на рис. 8.10 очень неэффективна и, следовательно, подходит только для маломощных цепей привода шагового двигателя.
На рис. 8.11 показана эффективная униполярная схема возбуждения, обеспечивающая быстрое нарастание и затухание тока. Он использует принцип чоппера. Показанная цепь предназначена только для одной фазы. Каждая другая фаза будет использовать аналогичную схему. Напряжение источника постоянного тока теперь может быть намного больше, чем в схемах привода шагового двигателя на рис.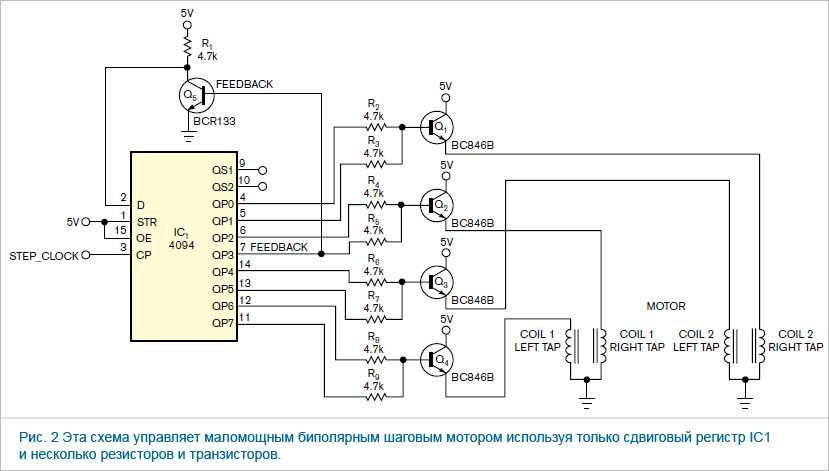 8.10.
8.10.
На рисунках 8.11(a), (b) и (c) показаны схема возбуждения, фазное напряжение и кривые тока соответственно. Для включения фазы полупроводниковые выключатели S 1 и S 2 замыкаются при t = t o . Это подключает фазную обмотку к источнику постоянного напряжения V d , и фазный ток i ph быстро нарастает. Когда он пересекает номинальный ток I R на заданную величину, S 1 отключается. Фазный ток свободно проходит через S 2 и Д 2 и уменьшается ниже I Р . Через фиксированный интервал включается S 1 . Ток фазы i ph увеличивается. При превышении им номинального тока I R на установленную величину снова отключается S 1 . Таким образом, при поочередном включении и выключении переключателя S 1 значение фазного тока поддерживается равным примерно I R . При t = t 0 + T фаза обесточивается отключением обоих S 1 и S 2 . Теперь фазный ток протекает по пути, состоящему из D 1 , источника V d и D 2 , и большая часть энергии, запасенной в индуктивности фазной обмотки, возвращается обратно к источнику V d . Поскольку фазный ток должен протекать против большого напряжения V d , он быстро спадает до нуля.
Теперь фазный ток протекает по пути, состоящему из D 1 , источника V d и D 2 , и большая часть энергии, запасенной в индуктивности фазной обмотки, возвращается обратно к источнику V d . Поскольку фазный ток должен протекать против большого напряжения V d , он быстро спадает до нуля.
Биполярный привод для двигателей с постоянными магнитами и гибридных двигателей:
Простая биполярная схема привода для одной фазы показана на рис. 8.12. Каждая другая фаза будет использовать аналогичную схему. По фазной обмотке протекает положительный ток, когда полупроводниковые переключатели S 1 и S 2 проводят ток, и он несет отрицательный ток, когда S 3 и S 4 проводят.
На фазную обмотку подается положительный ток при включении S 1 и S 2 . Внешнее сопротивление R E снижает электрическую постоянную времени, позволяя быстро нарастать фазному току. V d и R E выбраны так, чтобы удовлетворять уравнению. (8.1). Фаза обесточивается выключением S 1 и S 2 . Ток обмотки теперь протекает по пути, состоящему из D 3 , источника V d и D 4 . Большая часть энергии, запасенной в индуктивности фазной обмотки, возвращается обратно к источнику, и фазный ток быстро спадает до нуля. Из-за наличия внешнего сопротивления R E схема возбуждения малоэффективна, хотя и более эффективна, чем однополярная схема возбуждения рис. 8.10.
V d и R E выбраны так, чтобы удовлетворять уравнению. (8.1). Фаза обесточивается выключением S 1 и S 2 . Ток обмотки теперь протекает по пути, состоящему из D 3 , источника V d и D 4 . Большая часть энергии, запасенной в индуктивности фазной обмотки, возвращается обратно к источнику, и фазный ток быстро спадает до нуля. Из-за наличия внешнего сопротивления R E схема возбуждения малоэффективна, хотя и более эффективна, чем однополярная схема возбуждения рис. 8.10.
Путем исключения R E , и с использованием принципа прерывателя получается эффективная биполярная схема возбуждения. Затем схема работает следующим образом.
Для питания фазной обмотки положительным током включаются С 1 и С 2 . Фазный ток быстро нарастает. При превышении им номинального тока на заданную величину (рис. 8.11 (б) и (в)), S 1 отключается. Фазный ток проходит через S 2 и D 4 . Через фиксированный интервал S 1 снова включен. Таким образом, фазный ток колеблется около номинального значения I R . Когда фаза должна быть обесточена, оба S 1 и S 2 выключаются. Ток обмотки протекает по пути, состоящему из Д 3 , источника В , д и Д 4 . Фазный ток быстро затухает, и энергия, накопленная в индуктивности обмотки, восстанавливается источником питания.
Через фиксированный интервал S 1 снова включен. Таким образом, фазный ток колеблется около номинального значения I R . Когда фаза должна быть обесточена, оба S 1 и S 2 выключаются. Ток обмотки протекает по пути, состоящему из Д 3 , источника В , д и Д 4 . Фазный ток быстро затухает, и энергия, накопленная в индуктивности обмотки, восстанавливается источником питания.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Q444444444. 4030 IC3
Q444444444. 4030 IC3 
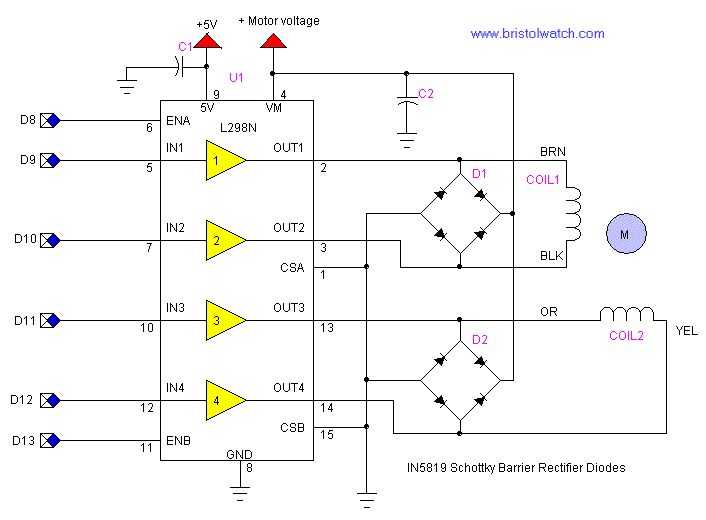
 Униполярные двигатели можно подключать как биполярные, не используя плюсовые провода.
Униполярные двигатели можно подключать как биполярные, не используя плюсовые провода.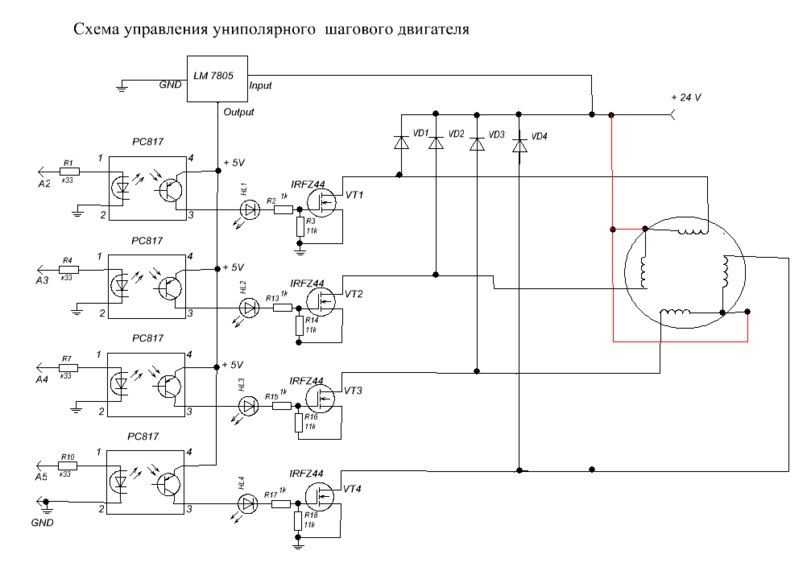

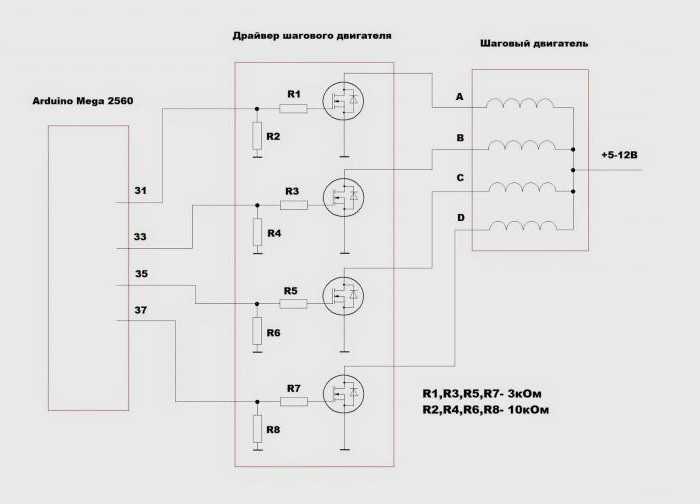 1). Шестипроводные двигатели выводят каждый центральный кран отдельно. Два центральных отвода необходимо соединить снаружи
1). Шестипроводные двигатели выводят каждый центральный кран отдельно. Два центральных отвода необходимо соединить снаружи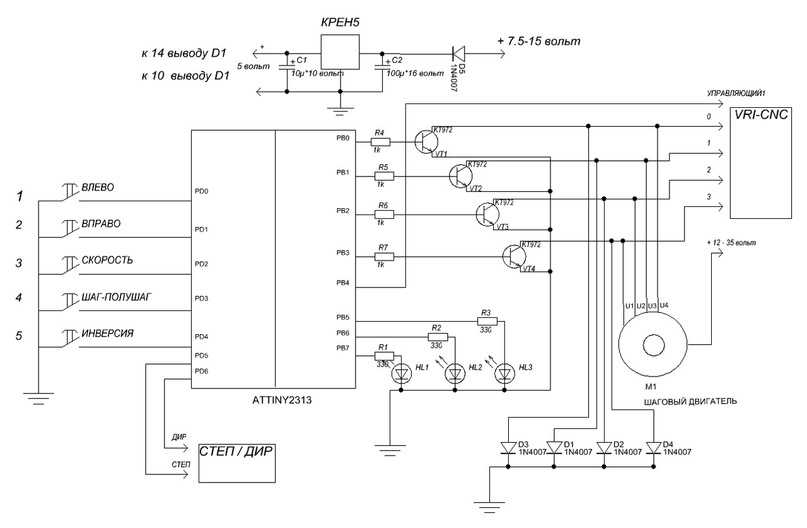
 Подайте питание. Убедитесь, что переключатель SPDT установлен в положение INTernal. Посмотрите, крутится ли мотор. Если нет, то поменяйте местами только провода M1B и M2B и проверьте еще раз. Теперь он должен вращаться. VR1 будет изменять скорость шага.
Подайте питание. Убедитесь, что переключатель SPDT установлен в положение INTernal. Посмотрите, крутится ли мотор. Если нет, то поменяйте местами только провода M1B и M2B и проверьте еще раз. Теперь он должен вращаться. VR1 будет изменять скорость шага.

 Этот LC-метр позволяет измерять невероятно малые индуктивности, что делает его идеальным инструментом для изготовления всех типов ВЧ-катушек и катушек индуктивности. LC Meter может измерять индуктивность от 10 нГн до 1000 нГн, 1 мкГн — 1000 мкГн, 1 мГн — 100 мГн и емкости от 0,1 пФ до 900 нФ. Схема включает автоматический выбор диапазона, а также переключатель сброса и обеспечивает очень точные и стабильные показания.
Этот LC-метр позволяет измерять невероятно малые индуктивности, что делает его идеальным инструментом для изготовления всех типов ВЧ-катушек и катушек индуктивности. LC Meter может измерять индуктивность от 10 нГн до 1000 нГн, 1 мкГн — 1000 мкГн, 1 мГн — 100 мГн и емкости от 0,1 пФ до 900 нФ. Схема включает автоматический выбор диапазона, а также переключатель сброса и обеспечивает очень точные и стабильные показания. Это очень полезное стендовое испытательное оборудование для тестирования и определения частоты различных устройств с неизвестной частотой, таких как генераторы, радиоприемники, передатчики, функциональные генераторы, кристаллы и т. д.
Это очень полезное стендовое испытательное оборудование для тестирования и определения частоты различных устройств с неизвестной частотой, таких как генераторы, радиоприемники, передатчики, функциональные генераторы, кристаллы и т. д. Его можно подключить к любому источнику стереозвука, такому как iPod, компьютер, ноутбук, CD-плеер, Walkman, телевизор, спутниковый ресивер, кассетная дека или другая стереосистема для передачи стереозвука с превосходной четкостью по всему дому, офису, двору или лагерная площадка.
Его можно подключить к любому источнику стереозвука, такому как iPod, компьютер, ноутбук, CD-плеер, Walkman, телевизор, спутниковый ресивер, кассетная дека или другая стереосистема для передачи стереозвука с превосходной четкостью по всему дому, офису, двору или лагерная площадка.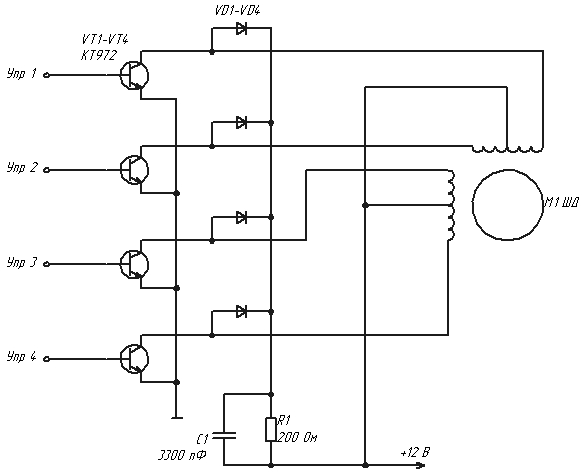 Он также анализирует характеристики транзистора, такие как напряжение и коэффициент усиления. Это незаменимый инструмент для устранения неполадок и ремонта электронного оборудования путем определения работоспособности и исправности электролитических конденсаторов. В отличие от других измерителей ESR, которые измеряют только значение ESR, этот измеряет значение ESR конденсатора, а также его емкость одновременно.
Он также анализирует характеристики транзистора, такие как напряжение и коэффициент усиления. Это незаменимый инструмент для устранения неполадок и ремонта электронного оборудования путем определения работоспособности и исправности электролитических конденсаторов. В отличие от других измерителей ESR, которые измеряют только значение ESR, этот измеряет значение ESR конденсатора, а также его емкость одновременно.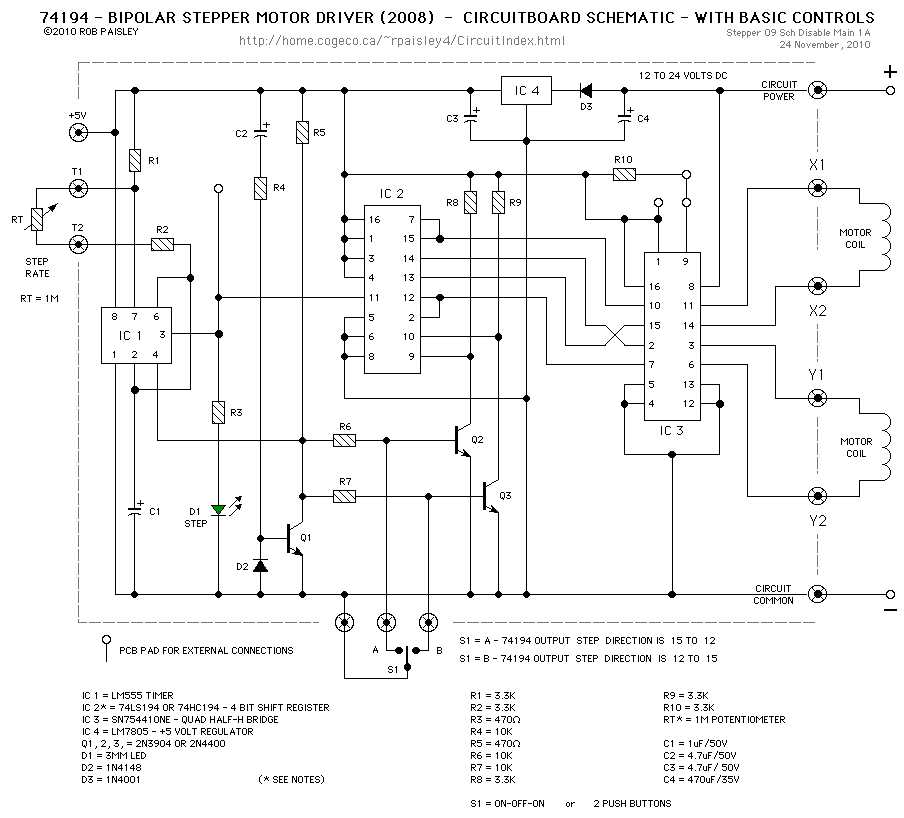 д. Усилитель для наушников достаточно мал, чтобы поместиться в жестяную коробку Altoids, а благодаря низкому энергопотреблению может питаться от одного 9батарея В.
д. Усилитель для наушников достаточно мал, чтобы поместиться в жестяную коробку Altoids, а благодаря низкому энергопотреблению может питаться от одного 9батарея В. Плата оснащена 28-контактным разъемом DIP IC, заменяемым пользователем микроконтроллером ATmega328, прошитым загрузчиком Arduino, кварцевым резонатором 16 МГц и переключателем сброса. Он имеет 14 цифровых входов/выходов (0-13), 6 из которых могут использоваться как выходы ШИМ и 6 аналоговых входов (A0-A5). Скетчи Arduino загружаются через любой адаптер USB-Serial, подключенный к разъему 6-PIN ICSP female. Плата питается напряжением 2-5 В и может питаться от батареи, такой как литий-ионный элемент, два элемента AA, внешний источник питания или адаптер питания USB.
Плата оснащена 28-контактным разъемом DIP IC, заменяемым пользователем микроконтроллером ATmega328, прошитым загрузчиком Arduino, кварцевым резонатором 16 МГц и переключателем сброса. Он имеет 14 цифровых входов/выходов (0-13), 6 из которых могут использоваться как выходы ШИМ и 6 аналоговых входов (A0-A5). Скетчи Arduino загружаются через любой адаптер USB-Serial, подключенный к разъему 6-PIN ICSP female. Плата питается напряжением 2-5 В и может питаться от батареи, такой как литий-ионный элемент, два элемента AA, внешний источник питания или адаптер питания USB.