Содержание
Шаговые двигатели 57 мм со встроенным драйвером SMD-2.8mini ver.2
Заказать
| Напряжение питания, В | 12 – 24 |
| Величина полного шага, град | 1,8 |
| Дробление шага | 1/1… 1/256 |
| Макс. осевое биение вала двигателя, мм/td> | 0.08 |
| Мин. осевое биение вала двигателя, мм | 0.02 |
| Управление шаговым двигателем | Импульсное STEP/DIR, команды по RS-232 |
Скачать паспорт .pdf
Шаговый двигатель с интегрированным драйвером SMD-2.8mini ver.2 – это готовое решение шагового привода компактных размеров. Шаговый привод предназначен для контролируемого вращения полезной нагрузки в соответствии с сигналами, поступающими на управляющие входы драйвера. Шаговые двигатели с фланцем 56 мм (NEMA 23) широко распространены в небольших ЧПУ станках, оборудовании для упаковки, робототехнике. Компактные размеры привода позволяют размещать его в небольших системах, не выделяя отдельное место для размещения драйвера. Подобрать кронштейн для крепления здесь
Шаговые двигатели с фланцем 56 мм (NEMA 23) широко распространены в небольших ЧПУ станках, оборудовании для упаковки, робототехнике. Компактные размеры привода позволяют размещать его в небольших системах, не выделяя отдельное место для размещения драйвера. Подобрать кронштейн для крепления здесь
Модели шаговых мини-двигателей
FL57STH76-2804А
с SMD-2.8mini ver.2
Фланец
57 x 57 мм
Момент
18.9 кгс*см
Напряжение
12 — 24 В
Шаг
1.8°
Инерция ротора
480 г*см2
Сопротивление
1,13 Ом
Индуктивность
3,6 мГн
Ток фаз
2,8 А
Заказать
ШД5776-3.
 0A
0A
с SMD-2.8mini ver.2
Фланец
57 x 57 мм
Момент
20 кгс*см
Напряжение
12 — 24 В
Шаг
1.8°
Инерция ротора
480 г*см2
Сопротивление
0.9 Ом
Индуктивность
3,5 мГн
Ток фаз
3,0 А
Заказать
Габаритные и присоединительные размеры
FL57STH76-2804А
с SMD-2.8mini ver.2ШД5776-3.0A
c SMD-2.8mini ver.2
Характеристики SMD‑2.8mini ver.2
Рабочее напряжение питания
12 – 48 В
Диапазон установки тока фазы
1,0 — 1,8 А
Дробление шага
1 — 1/256
Допустимый ток удержания
30%, 50%,
70%, 100%
Минимальная длина импульса «Шаг»
3 мкс
Входное напряжение управляющих
сигналов «высокого» уровня
5В/24В
Входное напряжение управляющих
сигналов «низкого» уровня
0…1В
Режимы управления
Импульсное управление
положением STEP/DIR,
Управление командами
по RS-232
Преимущества двигателей SMD–2.
 8mini ver.2
8mini ver.2
- Законченное изделие — двигатель + блок управления. Нет необходимости производить их взаимную коммутацию. Двигатель и блок подключены и настроены для оптимальной работы;
- Экономия места. Не нужно предусматривать дополнительное установочное место для блока управления;
- Отсутствие лишних проводов, которые могли бы понизить надежность конструкции, особенно в подвижных механизмах ЧПУ-станков.
Отличие драйвера от других исполнений
Принципиальное отличие этого драйвера от предыдущих исполнений — новая конструкция и улучшенная схемотехника, которые обеспечивают быстрый разгон и сохранение значительного крутящего момента на высоких скоростях. Разгон до скоростей 1000 об/мин и более может осуществляться за доли секунды. Рабочая скорость более 4000 об/мин с поддержанием крутящего момента, достаточного для выполнения полезной работы теперь доступна для большинства моделей шаговых двигателей.
Примеры подключения драйвера SMD–2.8mini ver.2
При управлении шаговым приводом импульсными логическими сигналами драйвер обрабатывает входные сигналы ШАГ (импульс), НАПРАВЛЕНИЕ (уровень) и РАЗРЕШЕНИЕ (уровень).Входы управления могут подключаться с общим катодом и общим анодом.
Для настройки параметров или управления шаговым приводом по RS-232 необходимо подключение по RS-232. Для большинства компьютеров без встроенного COMпорта необходимо использовать преобразователь интерфейса RS-232/USB.
Общая схема подключения
Схема подключения логических сигналов – общий катодСхема подключения логических сигналов – общий анод
Подключение преобразователя интерфейса к драйверу SMD–2.8mini ver.2
Соединение преобразователя интерфейса USB-UART c драйвером SMD–2.8mini ver.2 показано на схеме. Контакты RX и TX драйвера подключаются к контактам TXD и RXD преобразователя соответственно.
Программное обеспечение для параметризации и управления SMD–2.8miniver.2 по RS-232
Для настройки и управления шаговым приводом со встроенным драйвером SMD‑2.8miniver.2 по интерфейсу RS‑232 мы предоставляем две программы:CONFIG SMD‑2.8MINI/SMD‑2.8MINI (для настройки параметров привода) и SMD mini control (для настройки параметров и управления приводом)
Готовое программное обеспечение SMD mini control предназначено для быстрой параметризации блоков, а также для выполнения заданного перемещения, установки скорости и ускорения, запуска и остановки двигателя, включения/выключения фаз двигателя
Связаться с нами
Хотите узнать дополнительную информацию о продукции — задайте вопрос. Наш специалист свяжется с вами в ближайшее время.
Принцип работы шагового двигателя, схема подключения униполярного электродвигателя, пошаговое управление
Шаговым двигателем называют электромеханическое устройство, преобразующее электрические сигналы в дискретные угловые перемещения вала.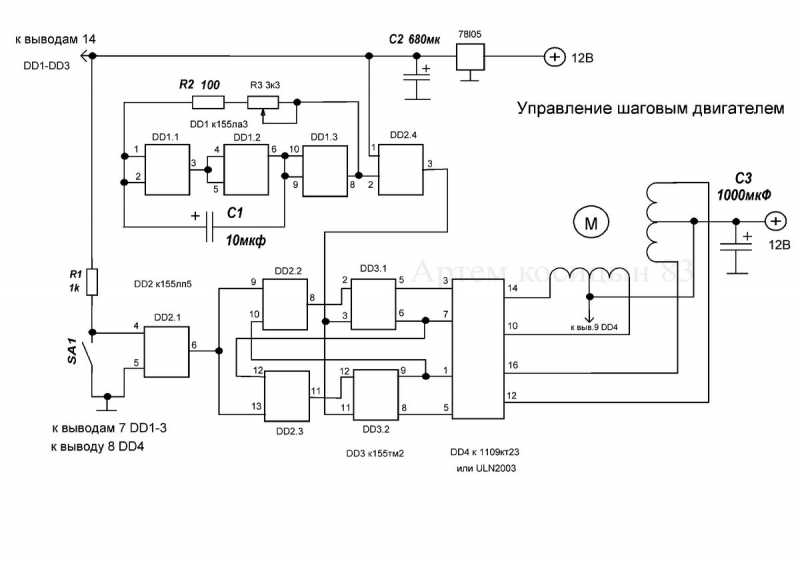 Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения.
Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения.
Применяются в станках с ЧПУ, робототехнике, где требуется дискретные движения, фиксация положения и небольшая скорость.
Содержание статьи
- 1 Отличие и разновидности шаговых двигателей
- 2 Конструкция и принцип работы
- 3 Методы управления фазами
- 4 Способы управления шаговым двигателем
- 5 Микрошаговый режим привода
Отличие и разновидности шаговых двигателей
По принципу работы они ближе к двигателям постоянного тока. Конструкция электродвигателей постоянно совершенствуется для уменьшения трудозатрат при изготовлении, повышения КПД и увеличения количество оборотов. У них по сравнению с двигателем постоянного тока нет щёток, коллектора, а обмотки с меньшим количеством витков.
Среди первых двигателей был создан миниатюрный двигатель для ручных часов и назван в честь французского инженера Мариус Лавета.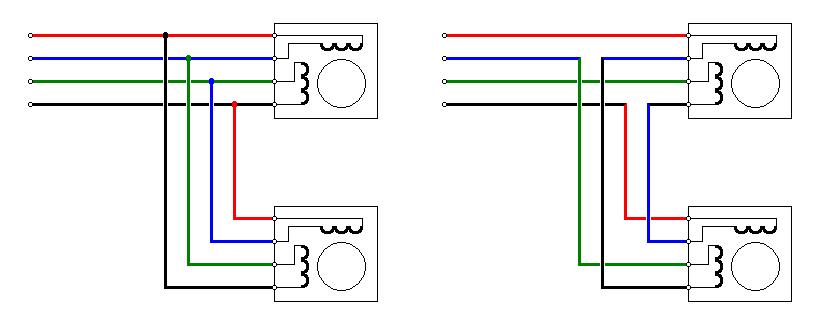 Статор расцеплен на краях или в районе ротора имеет небольшие сужения. Ротор диаметром 1.5 мм, магнитный на основе кобальта. Одна обмотка в один ряд питание 1.5 вольта. Угол поворота 90 градусов.
Статор расцеплен на краях или в районе ротора имеет небольшие сужения. Ротор диаметром 1.5 мм, магнитный на основе кобальта. Одна обмотка в один ряд питание 1.5 вольта. Угол поворота 90 градусов.
Моторчик лавета применяется также и в медицине для перекачки различной жидкости, а также часто используется в миксерах и блендерах.
В последнее время ведутся разработки пьезоэлектрических двигателей с использованием пьезомагнитного эффекта и применяя в конструкции ферромагнитные материалы. Совершенствуются линейные электродвигатели, у которых вал не вращается, а совершает линейные движения. Для оборудования точной механики российские производители выпускают двигатели с маркировкой серии:
- ДШ.
- ДШР.
- ДШГ.
- ДШЛ.
- ШД.
- ДШЭ
В производстве их участвуют такие предприятия, как НПО «АТОМ», ZETEK, компания Электропривод, Stepmotor, Вексон, НПО РИФ, Саратовский эл. механический, корпорация ВНИИЭМ, ЗАО Уралэлектромаш, АРК «Энергосервис». Производством ШД FL 203, FL 28, FL 57, 35 HS, 57 HS, 17 HD занимаются зарубежные фирмы: Fulling motor, Autonics, Motionking YUHA motor, Jlangsu, Phytron и другие. Ассортимент выпускаемых ШД разнообразный: по типоразмерам, мощности, со встроенным редуктором и платой управления.
механический, корпорация ВНИИЭМ, ЗАО Уралэлектромаш, АРК «Энергосервис». Производством ШД FL 203, FL 28, FL 57, 35 HS, 57 HS, 17 HD занимаются зарубежные фирмы: Fulling motor, Autonics, Motionking YUHA motor, Jlangsu, Phytron и другие. Ассортимент выпускаемых ШД разнообразный: по типоразмерам, мощности, со встроенным редуктором и платой управления.
Конструкция и принцип работы
Шаговый двигатель состоит из статора и вращающегося ротора. Сердечник статора выполнен в виде набора листов электротехнической стали (штампованных). Это уменьшает вихревые токи и соответственно нагрев. Статор по окружности разбит на 4.6.8 продольных пазов. Применяется и больше. На выступах между пазами располагаются обмотки в виде катушек. Количество пазов соответствует количеству полюсов двигателя. Чем больше полюсов, тем меньше угол поворота ротора, то есть шаг.
Ротор состоит из одного или двух постоянных магнитов, с торцов, металлические пластины которого закреплены с зубьями. При этом плюса S и N постоянного магнита разбиваются на n полюсов, что соответствует количеству зубьев. Это также влияет на величину шага вращения. По конструкции ШД выпускаются трёх типов в зависимости от конструкции ротора:
При этом плюса S и N постоянного магнита разбиваются на n полюсов, что соответствует количеству зубьев. Это также влияет на величину шага вращения. По конструкции ШД выпускаются трёх типов в зависимости от конструкции ротора:
- реактивный;
- ротор из постоянного магнита;
- гибридный.
Реактивный — ротор выполнен из ферромагнитного материала с продольными пазами, полюсами. Он используется редко, только для выполнения простых задач. В основном из-за того, что у него нет стопорящего момента. Гибридный — ротор изготовлен из двух половинок ферромагнитного материала, с продольными пазами и между ними расположен постоянный магнит. Пазы половинок относительно друг друга, сдвинуты на небольшой угол, для понижения шага. Они чаще всего применяются.
При подаче импульсного напряжения на обмотку статора образуется электромагнитное поле. Взаимодействуя, с ближайшим полюсом постоянного магнита создаётся крутящий момент.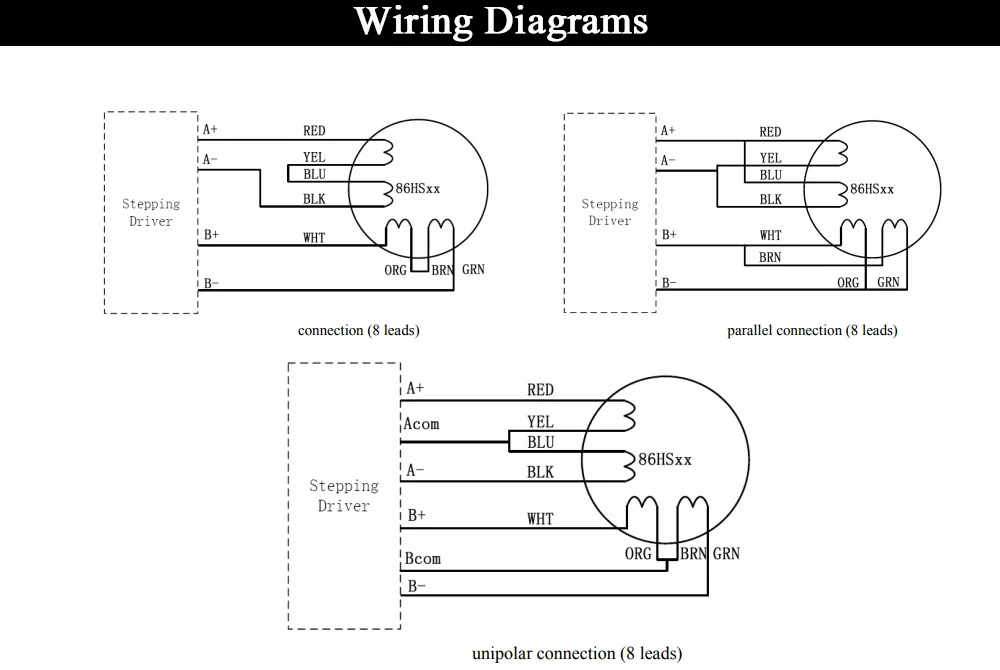 Вал двигателя поворачивается на определённый угол. Угол поворота в основном зависит от количества полюсов ротора.
Вал двигателя поворачивается на определённый угол. Угол поворота в основном зависит от количества полюсов ротора.
Такой двигатель и будет называться шаговым. Благодаря небольшим размерам ШД серии Em 422 применяется в матричных принтерах.
Методы управления фазами
Управление в основном зависит от количества полюсов и конфигурации обмоток статора. ШД выпускаются в основном со следующими обмотками:
- Две обмотки с 4 выводами.
- Две обмотки с 6 проводами со средним выводом.
- Четыре обмотки — 8 выводов.
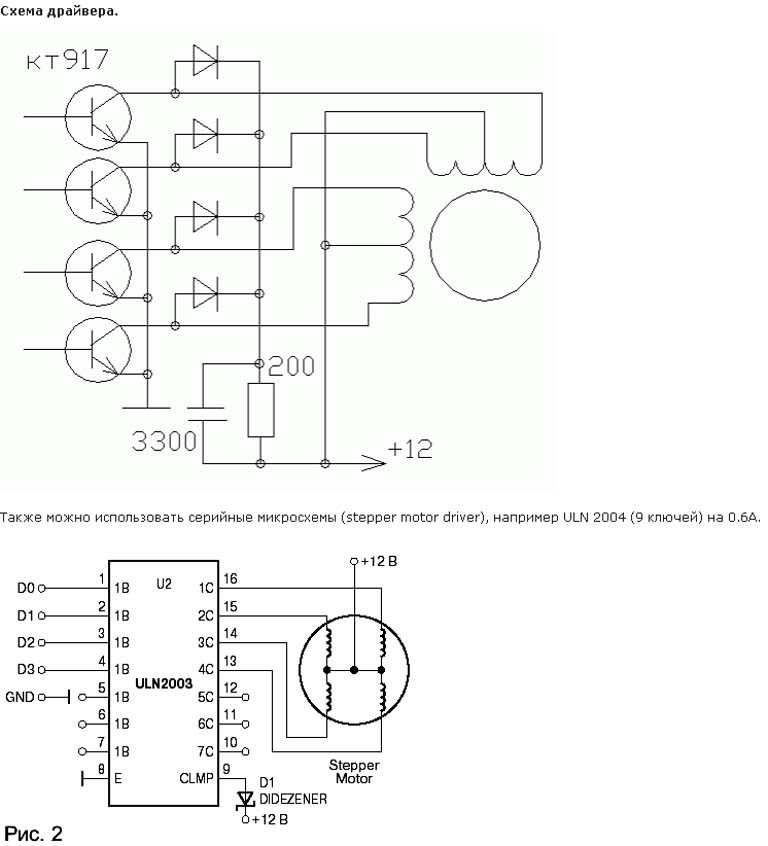
Управлять можно двумя методами, использовать однополярное напряжение — униполярное или двухполярное — биполярное. Униполярный шаговый двигатель имеет 4 полюса и 2 обмотки. У четырехфазного каждая обмотка разделена пополам и располагается на противоположных полюсах. Вращение осуществляется поочерёдной подачей напряжения на обмотки.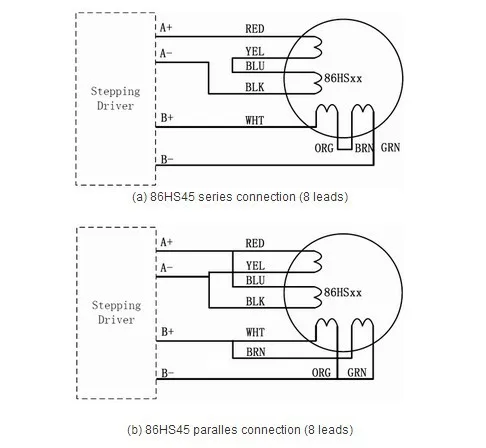 При 6 выводах или 5 тоже 2 обмотки, но с отводом от середины. Обычно средние выводы катушки соединяются вместе на минусовой провод, а плюсовой через управляемые ключи подаётся на обмотки.
При 6 выводах или 5 тоже 2 обмотки, но с отводом от середины. Обычно средние выводы катушки соединяются вместе на минусовой провод, а плюсовой через управляемые ключи подаётся на обмотки.
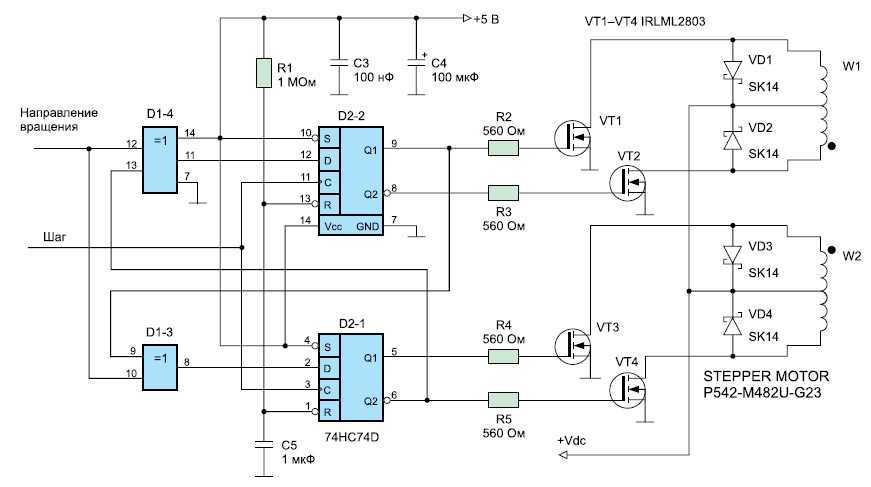
Двигатели с биполярным управлением имеют 4 обмотки, по 2 на каждую фазу. Управление происходит при смене полярности обмотки. При таком управлении усложняется схема подключения шагового двигателя, но крутящий момент при этом получается больше. Основные характеристики — напряжение питания, потребляемый ток фазы, шаг, мощность и размер фланца. Посадочные места стандартизированы и указываются как, например, Nema 23. Это соответствует расстоянию между отверстиями под крепление 57 мм.
Способы управления шаговым двигателем
Применение ШД в станках с ЧПУ конкурирует только с сервоприводами, например, в эрозионных станках или принтерах, они даже превосходят их по своим техническим возможностям, себестоимости и простым схемам управления.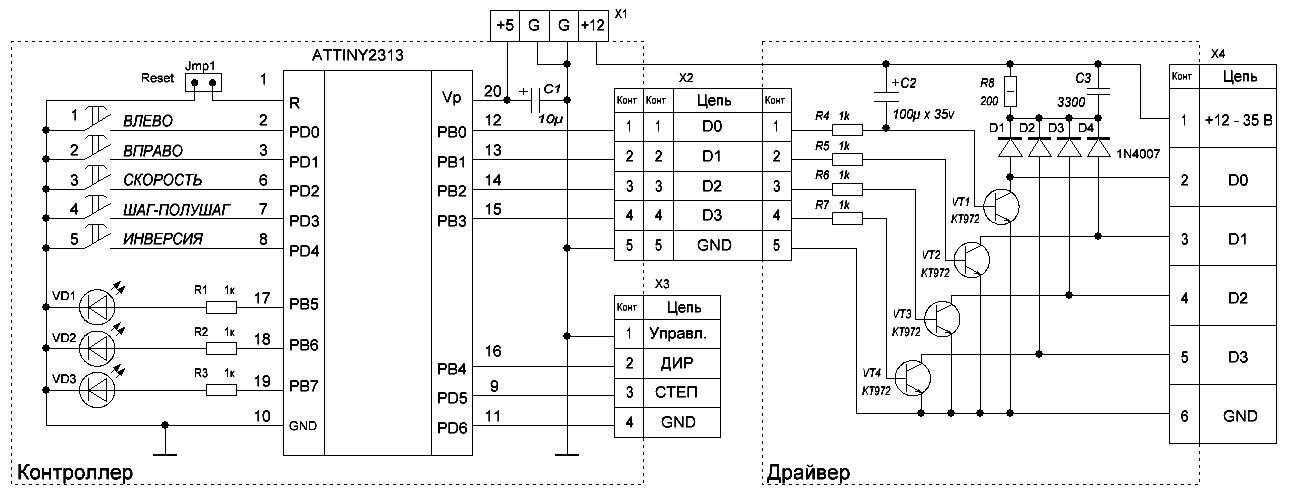 Управление можно осуществлять на цифровых микросхемах, специализированных — А3977, на программированной PIC16, через ключи или драйверы SMSD 1.5.
Управление можно осуществлять на цифровых микросхемах, специализированных — А3977, на программированной PIC16, через ключи или драйверы SMSD 1.5.
Большинство драйверов управляются компьютером через порты RS-232, USB и LPT. Они вырабатывают сигналы управления: шаг, направление, разрешение и обеспечивают дробление шага на ½ до 1/32 и работают с программами: MACh4, KCam, DeskCNC, Turbocnc и другими. Кабелем подключить двигатель к драйверу согласно описанию. Изучив работу программы, запустить в работу несложно. Для включения используется напряжение от 5 вольт до 48 вольт. Исключения составляют двигатели на 220/110 вольт.
Микрошаговый режим привода
Основное время работы ШД происходит в пошаговом или полушаговом режиме, а при пуске и остановке желательно использовать микрошаговый режим для точной фиксации. Пошаговый режим определён конструкцией и импульсным управлением. При микрошаговой работе на обмотки подаются синусоидальные напряжения с нужным сдвигом фаз.
При микрошаговой работе на обмотки подаются синусоидальные напряжения с нужным сдвигом фаз.
Ротор фиксируется при определённом соотношении фаз токов в обмотках. Расчёт точки равновесия произвести по формуле x = S *pi/2*arctg a/b где:
- a — момент, создаваемый первой фазой и b — второй фазой;
- x — точка равновесия ротора или микрошаг в радианах;
- S — угол шага.
А также надо учитывать максимальную частоту управляющего сигнала, при которой нет потери или добавления лишнего шага в процессе работы. Она является основным показателем переходного режима шагового двигателя и обозначается в характеристиках, как частота приёмистости двигателя.
В процессе эксплуатации необходимо следить за чистотой вокруг привода и не допускать попадания металлической стружки, возможен выход из строя ШД. Найти способ защитить привод. Ремонт аналогичен ремонту коллекторного двигателя, требует аккуратности.
После разборки взять и продуть сжатым воздухом статор и ветошью протереть ротор. Проверить отсутствие биения подшипников.
4.2. Подключение шагового двигателя и источника питания
Информация в этом разделе поможет вам подключить шаговый двигатель и источник питания к Tic.
Во избежание повреждений или травм внимательно прочтите следующие предупреждения по технике безопасности:
Предупреждение: Этот продукт не разработан и не сертифицирован для какого-либо конкретного стандарта безопасности при работе с высоким напряжением. Работа с напряжением выше 30 В может быть чрезвычайно опасной, и ее должны выполнять только квалифицированные специалисты с соответствующим оборудованием и средствами защиты.
Предупреждение: Подключение или отключение шагового двигателя при включенном источнике питания двигателя (VIN) Tic может вывести драйвер двигателя из строя.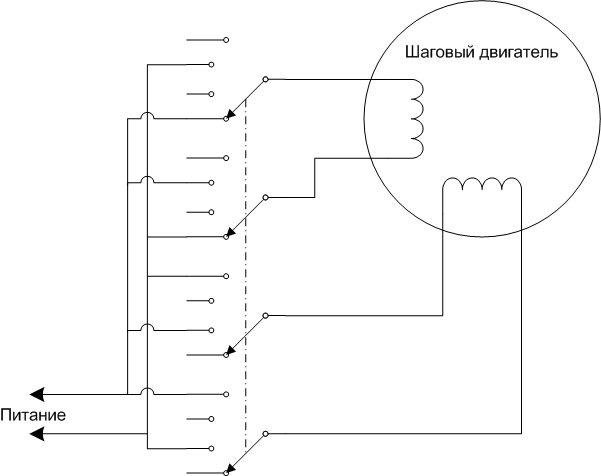 (В более общем смысле, переподключение чего-либо при включенном питании чревато неприятностями.)
(В более общем смысле, переподключение чего-либо при включенном питании чревато неприятностями.)
Предупреждение: Этот продукт может нагреваться настолько, что вы можете обжечься задолго до того, как микросхемы перегреются. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Прежде чем подключать что-либо к Tic, мы рекомендуем запустить программное обеспечение Tic Control Center, чтобы убедиться, что оно может подключаться к Tic через USB. Таким образом, вы можете убедиться, что Tic работает, прежде чем тратить время на пайку разъемов или подключение другой электроники, и, если что-то пойдет не так, вы будете лучше понимать, что вызвало проблему.
Подключение биполярного шагового двигателя с четырьмя или шестью выводами
Биполярные шаговые двигатели обычно имеют четыре или шесть выводов. Эти двухфазные шаговые двигатели имеют по одной катушке на фазу с одним проводом, подключенным к каждому концу каждой катушки. Версии с шестью выводами также обеспечивают доступ к центрам двух катушек, так что двигателем можно дополнительно управлять с помощью униполярного драйвера. При управлении шестивыводным шаговым двигателем с биполярным драйвером, таким как Tic, используются только концы катушек, а два центральных отвода следует оставить отсоединенными.
Версии с шестью выводами также обеспечивают доступ к центрам двух катушек, так что двигателем можно дополнительно управлять с помощью униполярного драйвера. При управлении шестивыводным шаговым двигателем с биполярным драйвером, таким как Tic, используются только концы катушек, а два центральных отвода следует оставить отсоединенными.
|
|
Замена A1 на A2 или B1 на B2 на приведенных выше схемах просто меняет направление вращения двигателя. Замена обоих оставит направление без изменений.
Подключение биполярного шагового двигателя с восемью выводами
В отличие от четырех- и шестивыводных шаговых двигателей, которые имеют одну катушку на фазу, восьмивыводной униполярный/биполярный шаговый двигатель имеет две катушки на фазу и дает вам доступ ко всем катушка ведет. У вас есть возможность использовать две катушки для каждой фазы параллельно или последовательно.
У вас есть возможность использовать две катушки для каждой фазы параллельно или последовательно.
При их параллельном подключении вы уменьшаете индуктивность катушки, что может привести к повышению производительности, если у вас есть возможность подавать больший ток. Однако, поскольку Tic активно ограничивает выходной ток по каждой фазе, вы получите только половину фазного тока, протекающего через каждую из двух параллельных катушек. При последовательном использовании фазных катушек это похоже на наличие одной катушки на фазу (например, типы двигателей, описанные выше). Обычно мы рекомендуем использовать последовательное соединение. На следующей схеме показано, как подключить такой шаговый двигатель к Tic с каждой парой фазных катушек параллельно (слева) или последовательно (справа):
|
|

Источник питания
Чтобы подключить источник питания к Tic, подключите отрицательную клемму или клемму заземления источника питания к контакту GND Tic на силовой стороне платы (рядом с выходом двигателя A1). Затем подключите положительную клемму вашего источника питания к контакту VIN рядом с ним.
Габаритные размеры шагового двигателя NEMA 17, разводка контактов
Шаговый двигатель NEMA 17 представляет собой бесщеточный электродвигатель постоянного тока, который делит полный оборот на равные шаги. Он подходит для приложений, где требуется точное движение. В этой статье мы обсудим шаговый двигатель NEMA-17, его применение и распиновку двигателя. Мы также подробно обсудим некоторые его технические характеристики.
Что такое NEMA?
NEMA расшифровывается как «Национальная ассоциация производителей электрооборудования». Это организация, которая устанавливает стандарты для компаний, производящих электротехническую продукцию и/или оборудование в различных секторах. Эта стандартизация устраняет некоторые распространенные недопонимания между пользователями и производителями электротехнической продукции и улучшает состояние электротехнического производства.
Содержание
- Что такое NEMA?
- NEMA 17 Stepper Motor
- Технические характеристики NEMA 17
- NEMA 17 Размеры шаговых двигателей
- NEMA 17 Шаповый мотор. Двигатель
Мигающая лампочка ПЛК — Включение и выключение управления
Включите JavaScript
Мигающая лампочка ПЛК — Время включения и выключения Пример программы
NEMA 17 представляет собой гибридный шаговый двигатель, который вращается с углом шага 1,8 градуса. Таким образом, чтобы совершить один оборот, вал делает 200 шагов.
 Термин «гибрид» означает, что это комбинация шагового двигателя с постоянным магнитом и переменным сопротивлением. Шаговые двигатели NEMA 17 с размерами 1,7 x 1,7 дюйма (42 x 42 мм) спроектированы так, чтобы обеспечивать больший крутящий момент, чем меньшие варианты, такие как шаговый двигатель NEMA 14.
Термин «гибрид» означает, что это комбинация шагового двигателя с постоянным магнитом и переменным сопротивлением. Шаговые двигатели NEMA 17 с размерами 1,7 x 1,7 дюйма (42 x 42 мм) спроектированы так, чтобы обеспечивать больший крутящий момент, чем меньшие варианты, такие как шаговый двигатель NEMA 14.Шаговый двигатель NEMA 17
Как и любой другой двигатель, шаговый двигатель NEMA 17 состоит из статора и ротора. Ротор двигателя NEMA 17 представляет собой постоянный магнит с 50 зубьями по окружности. Статор — это просто электромагнит с 48 зубьями. Они объединены в четыре пары групп, каждая из которых может управляться возбуждением постоянным током. Итак, когда мы возбуждаем пары катушек статора с помощью микроконтроллера, ротор вращается с плавным ступенчатым углом.
Технические характеристики NEMA 17
Спецификации для 6-фазовой (4 В, 1,2A) NEMA 17 Stepper Motor перечислены в таблице ниже:
Параметр Значение 9008 58 Напряжение 4V . Оцененный ток/фаза0,95A Угол шага 1,8 ° № ФАЗАС 4 № ФАЗА.0030 3.3ohm Inductance 4mH Length 33mm Rotor Inertia 35g-cm 2 Shaft Diameter Φ5mm Shaft Length 22 мм Размер корпуса 42 x 42 мм Униполярный удерживающий момент 2,59 кг-см (36 унций-дюйм) 39 Точность0030 10% Точность индуктивности 20% Пошаговый угол. (номинальный ток, 2 фазы) Температура окружающей среды -10°C ~ +50°C Сопротивление изоляции 100 МОм Мин. 500 В постоянного тока Диэлектрическая прочность 500 В переменного тока•5 мА в течение одной минуты Радиальный зазор вала 0,06 Макс. (нагрузка 450 г)Осевой зазор вала 0,08 Макс. (нагрузка 450 г) Характеристики шагового двигателя NEMA 17
Размеры шагового двигателя NEMA 17
Размеры шагового двигателя NEMA 17
Двигатель NEMA 17 имеет размеры лицевой панели 1,7 на 1,7 дюйма (43 мм × 43 мм). В зависимости от производителя другие размеры двигателя могут измениться, но размеры лицевой панели останутся прежними. Как и для описанного выше 6-проводного 2-фазного (4 В, 1,2 А) шагового двигателя NEMA 17, длина двигателя составляет 33 мм, диаметр вала — Φ5 мм, а длина вала — 22 мм. Если взять такой же мотор от другого производителя, то эти значения могут отличаться.
Схема контактов шагового двигателя NEMA 17
В зависимости от модели шаговый двигатель NEMA 17 может иметь 4, 5 или 6 проводов. Модели с 5 и 6 проводами являются униполярными шаговыми двигателями, а модель с 4 проводами — биполярными шаговыми двигателями.
Униполярные двигатели
Униполярный шаговый двигатель имеет два набора обмоток, расположенных перпендикулярно друг другу.
Такое расположение обмоток создает вращающееся магнитное поле для ротора.6-проводной шаговый двигатель
Если центральные ответвления берутся из каждой обмотки катушки, двигатель становится 6-проводным шаговым двигателем, и полученное таким образом расположение показано на рисунке ниже. Используя этот метод, мы создали четыре фазы вместо двух. Теперь каждая секция этой обмотки может быть запитана, исходя из необходимого для ротора угла шага.
Разводка 6-проводного шагового двигателя NEMA 17
В таблице ниже приведены выводы 6-проводного шагового двигателя.
Номер провода Wire type Wire color 1 The first end of Coil 1 Red 2 Centre-tap Black 3 The second Конец катушки 1 Красный/белый 4 Первый конец катушки 2 Зеленый 5 Центр-Тэп Белые 6 White 6 9930030 Второй конец катушки 2 Зеленый/белый Схема контактов 6-проводного шагового двигателя
5-проводного шагового двигателя
В приведенной выше конструкции каждый центральный отвод служит общим проводом для двух фаз.
Но если мы соединим оба центральных ответвления вместе, чтобы создать общий провод для всех четырех фаз, управление станет проще. Таким образом, двигатель становится 5-проводным шаговым двигателем, расположение обмоток которого показано на рисунке ниже.Распиновка 5-проводного шагового двигателя NEMA 17
В таблице ниже приведены выводы 5-проводного шагового двигателя.
Номер провода Тип проволоки Цвет провода 1 Первый конец катушки 1 . обе катушки) Черный 3 Второй конец катушки 1 Красный/белый 4 Первый конец катушки 2 Green 5 Второй конец катушки 2 Зеленая/белая Расхода из 5 проволочных мощно наборы обмоток без центральных ответвлений, поэтому у него всего 4 провода.
Управление биполярным двигателем становится затруднительным, поскольку для изменения направления тока в обмотке требуется Н-мост. (Подробнее)Схема обмотки 4-проводного шагового двигателя показана на рисунке ниже.
Выводы 4-проводного шагового двигателя NEMA 17
В таблице ниже приведены выводы 4-проводного шагового двигателя.
Wire Number Wire type Wire color 1 The first end of Coil 1 Red 2 The second end of Coil 1 Желтый 3 Первый конец катушки 2 Черный 4 Второй конец катушки 2 Оранжевый Выводы 4-проводного шагового двигателя
Примечание. Цвет провода, обозначающий каждую катушку/центральный отвод, может не соответствовать действительности для всех моделей.
В зависимости от производителя и типа модели цвет проводов может быть разным. Применение шагового двигателя NEMA 17
Как обсуждалось выше, шаговые двигатели NEMA 17 имеют высокий удерживающий момент. Несмотря на то, что некоторые двигатели имеют разомкнутую систему, их точность высока и подходит для приложений с высоким крутящим моментом и ускорением от низкого до среднего. Вот некоторые из распространенных применений этих двигателей:
- Факс -машины
- Маленькая робототехника
- Игровые машины
- Медицинская визуализация
- Mopiers
- 3D Printing Equipment
- . обсуждалось выше, шаговый двигатель NEMA 17 производится разными производителями. Если вы ищете общие и электрические характеристики для различных моделей NEMA 17, нажмите здесь.
Щелкните здесь, чтобы загрузить техническое описание шагового двигателя NEMA 17 производства Schneider Electric.
Часто задаваемые вопросы
Какая частота вращения у шагового двигателя NEMA 17?
Шаговые двигатели лучше всего работают при скорости примерно 1200 об/мин или ниже.
Хотя можно увеличить скорость небольшого шагового двигателя с помощью более мощного контроллера, это сократит срок службы двигателя.
Примечание: В шаговом двигателе максимальный крутящий момент создается при нулевой скорости. Однако крутящий момент падает по мере увеличения скорости.Максимальная скорость, с которой может работать шаговый двигатель NEMA 17 без обратной связи, составляет 2000 об/мин. Но рекомендуемый диапазон скоростей составляет 200-600 об/мин. В то время как для шагового двигателя NEMA 17 с замкнутым контуром максимальная скорость составляет 3000 об/мин. Для этого рекомендуемый диапазон скорости составляет 200-700 об/мин.
Насколько мощный шаговый двигатель Nema?
Двигатель считается надежным, если он обеспечивает высокий удерживающий момент. Для разных версий шагового двигателя NEMA 17 удерживающий момент варьируется от 2 кг-см до 5 кг-см. В то время как ток колеблется от 0,7 Ампер до 1,7 Ампер.
Благодаря более высокому крутящему моменту эти двигатели используются в 3D-принтерах, станках с ЧПУ, робототехнике и других промышленных приложениях. Все ли шаговые двигатели NEMA 17 одинаковы?
Номера NEMA обозначают стандартные размеры лицевой панели, на которой установлен двигатель. Никаких других характеристик мотора в нем не указывается. Это означает, что при наличии двух разных двигателей NEMA 17 они могут иметь совершенно разные технические характеристики и не могут использоваться вместо друг друга.
Стандартизация NEMA обеспечивает взаимозаменяемость, т. е. возможность перехода от одного производителя к другому без хлопот по замене различных частей двигателя, таких как муфты, монтажные кронштейны и т. д. Но, если мы возьмем шаговый двигатель NEMA 17, разработанный двух разных производителей, есть вероятность, что эти два двигателя могут иметь разные электрические или механические характеристики. Такие как длина и диаметр стержня, количество подводящих проводов и многое другое.
Поэтому перед установкой двигателя в каком-либо приложении рассмотрите все спецификации шагового двигателя NEMA от двух разных производителей.
Что означает NEMA 17?
Номер после двигателей NEMA указывает на размеры двигателя, указанные на паспортной табличке. В общем, для двигателя NEMA XX, разделив XX на 10, вы получите диаметр лицевой панели в дюймах. Следовательно, шаговый двигатель NEMA 17 имеет диаметр 1,7 дюйма. Размеры шагового двигателя NEMA 17 составляют 1,7 на 1,7 дюйма (43 мм × 43 мм).
В 3D-принтерах используются шаговые или серводвигатели?
Обычно в 3D-принтерах используются шаговые двигатели из-за их простого и точного управления. Это связано с тем, что шаговые двигатели имеют разомкнутую систему. Концевой выключатель можно использовать для создания исходного положения шагового двигателя, и, таким образом, путем подсчета шаговых импульсов можно управлять движением двигателя.
С другой стороны, серводвигатели работают в замкнутой системе.
 Термин «гибрид» означает, что это комбинация шагового двигателя с постоянным магнитом и переменным сопротивлением. Шаговые двигатели NEMA 17 с размерами 1,7 x 1,7 дюйма (42 x 42 мм) спроектированы так, чтобы обеспечивать больший крутящий момент, чем меньшие варианты, такие как шаговый двигатель NEMA 14.
Термин «гибрид» означает, что это комбинация шагового двигателя с постоянным магнитом и переменным сопротивлением. Шаговые двигатели NEMA 17 с размерами 1,7 x 1,7 дюйма (42 x 42 мм) спроектированы так, чтобы обеспечивать больший крутящий момент, чем меньшие варианты, такие как шаговый двигатель NEMA 14. Оцененный ток/фаза
Оцененный ток/фаза (нагрузка 450 г)
(нагрузка 450 г)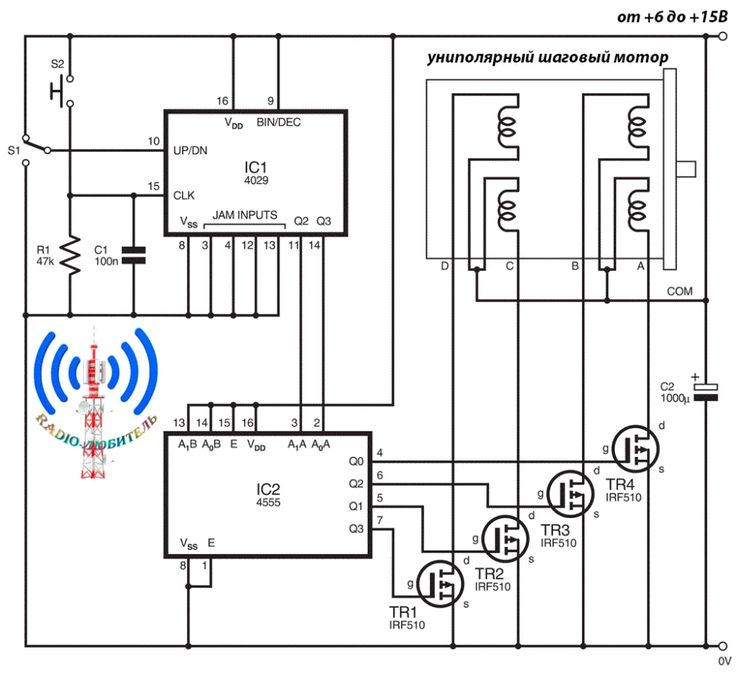 Такое расположение обмоток создает вращающееся магнитное поле для ротора.
Такое расположение обмоток создает вращающееся магнитное поле для ротора. Но если мы соединим оба центральных ответвления вместе, чтобы создать общий провод для всех четырех фаз, управление станет проще. Таким образом, двигатель становится 5-проводным шаговым двигателем, расположение обмоток которого показано на рисунке ниже.
Но если мы соединим оба центральных ответвления вместе, чтобы создать общий провод для всех четырех фаз, управление станет проще. Таким образом, двигатель становится 5-проводным шаговым двигателем, расположение обмоток которого показано на рисунке ниже. Управление биполярным двигателем становится затруднительным, поскольку для изменения направления тока в обмотке требуется Н-мост. (Подробнее)
Управление биполярным двигателем становится затруднительным, поскольку для изменения направления тока в обмотке требуется Н-мост. (Подробнее) В зависимости от производителя и типа модели цвет проводов может быть разным.
В зависимости от производителя и типа модели цвет проводов может быть разным.  Хотя можно увеличить скорость небольшого шагового двигателя с помощью более мощного контроллера, это сократит срок службы двигателя.
Хотя можно увеличить скорость небольшого шагового двигателя с помощью более мощного контроллера, это сократит срок службы двигателя.  Благодаря более высокому крутящему моменту эти двигатели используются в 3D-принтерах, станках с ЧПУ, робототехнике и других промышленных приложениях.
Благодаря более высокому крутящему моменту эти двигатели используются в 3D-принтерах, станках с ЧПУ, робототехнике и других промышленных приложениях.