Содержание
Режимы работы асинхронного двигателя | Мир инженера
Приветствую тебя, дорогой и уважаемый читатель сайта “world-engineer.ru”. В одной из статей посвященной шаровым кранам с электроприводом я затронул вопрос о работе асинхронного двигателя и пообещал рассказать о нём в другой статье. Так что в этой статье вы узнаете принцип работы асинхронного двигателя.
Асинхронный двигатель предназначен для работы в продолжительном режиме работы (условное обозначение S1), при котором нагрузка, приложенная к валу и условия охлаждения двигателя практически постоянны в промежутке времени, достаточном для нагрева двигателя до установившейся температуры.
Правильный расчет усредненных величин КПД и коэффициента мощности особенно важен при выборе геометрических размеров, расчета потерь, нагрева и охлаждения, и выборе установленной мощности стандартных двигателей, применяемых для работы в кратковременных и повторно-кратковременных режимах.
Для асинхронных двигателей совокупность кратковременных, повторно-кратковременных и перемежающихся режимов работы подразделяется на 7 групп с условными обозначениями S2…S8.
Кратковременный режим (S2), режим при, котором двигатель не успевает достигнуть номинальной температуры нагрева частей за время работы при постоянной нагрузке, и успевает охладиться до температуры окружающей среды за время пауз.
Повторно-кратковременный режим (S3) работы асинхронного двигателя, характерен для условий работы, при котором продолжительность цикла (10 мин) намного больше времени пуска (т.е. переходной процесс при пуске не влияет на нагрев двигателя и не учитываются). Продолжительность рабочего времени в течении цикла, задается в процентах от времени цикла 5%, 25%, 40% и 60%.
В режимах (S4), в отличие от (S3), продолжительность цикла настолько мала, что процессы, происходящие во время пуска (увеличение потерь из за многократного превышения величин пусковых токов над номинальным), оказывают непосредственное влияние на нагрев машины. Длительность цикла, в этом случае, определяется продолжительностью рабочего времени в процентах от времени цикла и числом включений в час. Поскольку характер переходного процесса во многом определяется динамической нагрузкой на валу, дополнительно задается допускаемый коэффициент инерции (отношение суммы моментов инерции ротора и приведенного к скорости вращения ротора, момента инерции приводного механизма к моменту инерции ротора), на который рассчитан двигатель из условий нормального нагрева.
Поскольку характер переходного процесса во многом определяется динамической нагрузкой на валу, дополнительно задается допускаемый коэффициент инерции (отношение суммы моментов инерции ротора и приведенного к скорости вращения ротора, момента инерции приводного механизма к моменту инерции ротора), на который рассчитан двигатель из условий нормального нагрева.
Режимы работы асинхронного двигателя, при которых в конце каждого цикла предусмотрено электрическое торможение двигателя обозначаются (S5). Продолжительности включения в этом случае, рассчитывается с учетом времени электрического торможения.
Перемежающийся режим (S6) повторяет условия работы режима (S3) с учетом того что, в этом режиме допускается реверс с электрическим торможением или переход на другую скорость вращения. Учет пусковых потерь на нагрев двигателя не производится.
Перемежающийся режим (S7) повторяет условия работы режима (S4) с учетом того что, в этом режиме допускается реверс с электрическим торможением или переход на другую скорость вращения.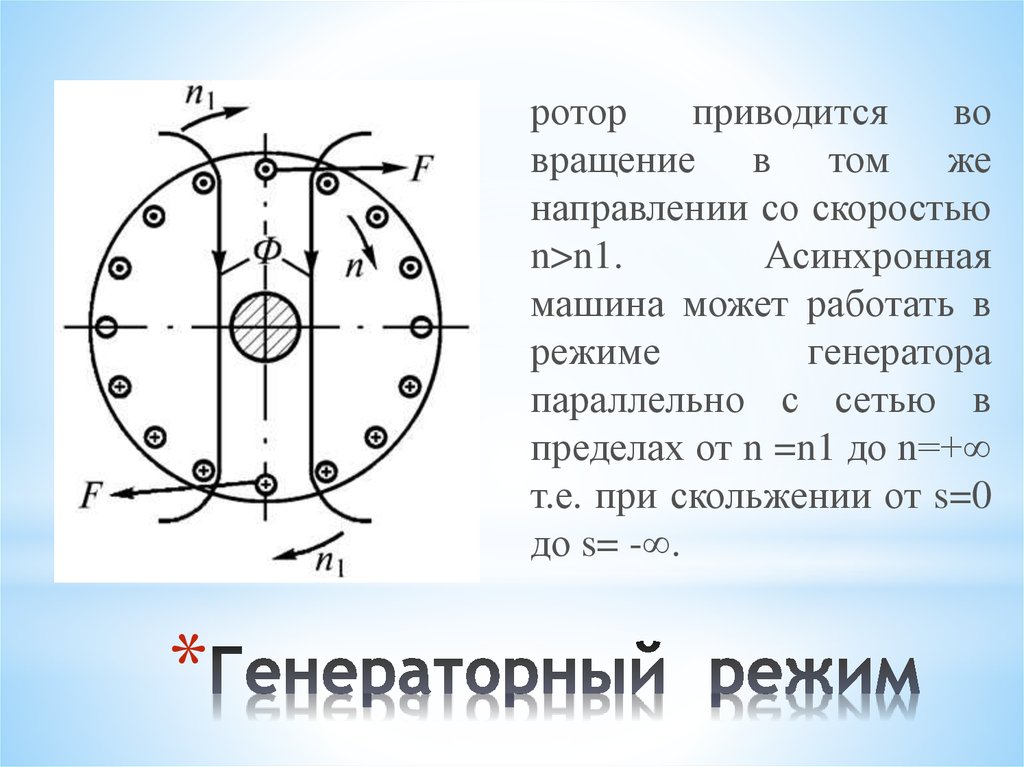
Перемежающийся режим (S8) повторяет условия работы режима (S7) с учетом того что, в этом режиме допускается работа двигателя на нескольких разных скоростях вращения с разными величинами нагрузки на валу.
Особенности определения установленной мощности в кратковременном (S2) и повторно-кратковременном режиме эксплуатации (S3, S6)
В кратковременном (S2) и повторно-кратковременных режимах эксплуатации (S3, S6) электродвигатели могут работать с большей установленной мощностью, чем в длительном режиме работы (S1).
Возможное значение величины превышения мощности рекомендуется определять из условия сохранения перегрузочной способности асинхронного двигателя по максимальному моменту в пределах:
МКР / (МN*KP) >= 1,6
При больших числах включения и больших маховых массах определение мощности рекомендуется производить исходя из:
- относительной продолжительности включения;
- частоты включения;
- величины внешнего момента инерции;
- нагрузочной диаграммы привода;
- типа торможения.

Рекомендуемые коэффициенты превышения установленной мощности
| S2 | Коэффициент превышения | S3 | Коэффициент превышения | S6 | Коэффициент превышения |
| 10 мин | 1,4 | 25% | 1,33 | 25% | 1,45 |
| 30 мин | 1,15 | 40% | 1,18 | 40% | 1,35 |
| 60% | 1,08 | 60% | 1,15 |
В настоящее время отменен ГОСТ 183-74 Машины электрические вращающиеся. Общие технические условия. И теперь взамен этого ГОСТ, действует ГОСТ Р 52776-2007 (МЭК 60034-1-2004) Машины электрические вращающиеся. Номинальные данные и характеристики.
Согласно, актуальному ГОСТ режим работы асинхронного двигателя (электрических машин) выбирается из типовых режимов от S1 до S10:
S1 – продолжительный режим. Работа асинхронного двигателя с постоянной нагрузкой и продолжительностью;
S2 – кратковременный режим. Работа асинхронного двигателя с постоянной нагрузкой в течении определенного времени. Вариант обозначения S2 60 мин;
Работа асинхронного двигателя с постоянной нагрузкой в течении определенного времени. Вариант обозначения S2 60 мин;
S3 – повторно-кратковременный периодический режим. Работа асинхронного двигателя при последовательных одинаковых рабочих циклах. Вариант обозначения S3 25%;
S4 – повторно-кратковременный периодический режим с пусками;
S5 — повторно-кратковременный периодический режим с электрическим торможением;
S6 — непрерывный периодический режим с кратковременной нагрузкой;
S7 — непрерывный периодический режим с электрическим торможением;
S8 — непрерывный периодический режим с взаимозависимыми изменениями нагрузки и частоты вращения;
S9 — режим с непериодическими изменениями нагрузки и частоты вращения;
S10 — режиме дискретными постоянными нагрузками и частотами вращения.
Более подробную информацию можете изучить в ГОСТ Р 52776-2007 (МЭК 60034-1-2004) Машины электрические вращающиеся. Номинальные данные и характеристики.
 youtube.com/embed/uXwamyaiUKo?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
youtube.com/embed/uXwamyaiUKo?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
Поделиться ссылкой:
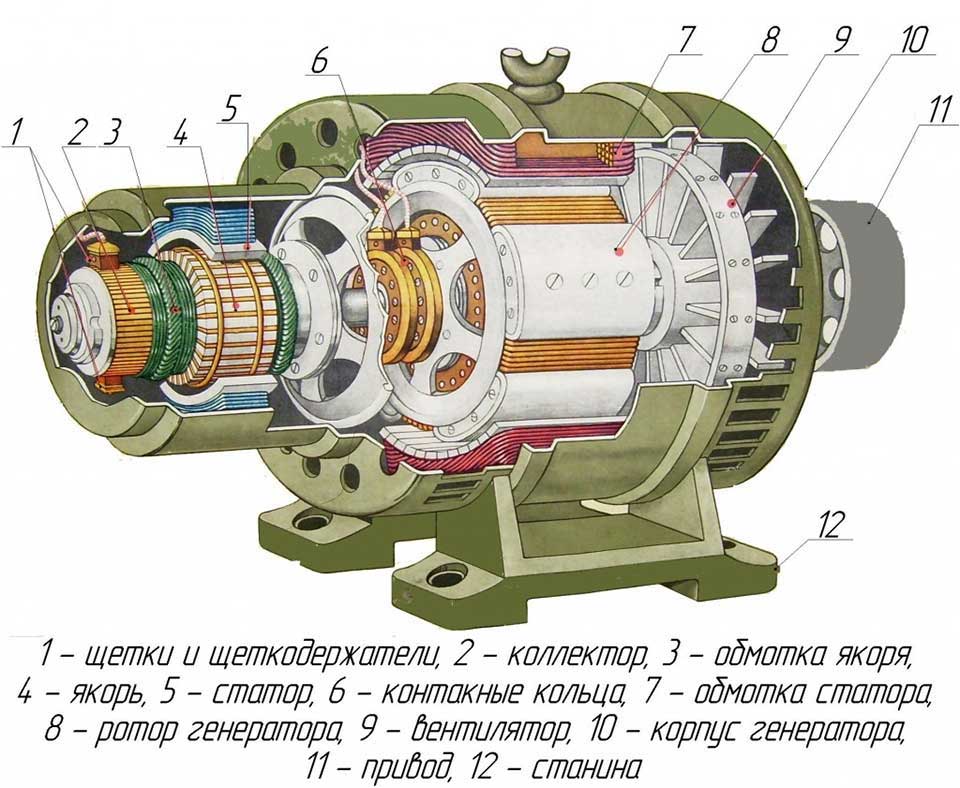
§78. Режимы работы асинхронных двигателей
Режимы работы асинхронных двигателей.
Холостой ход.
Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя при холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток.
Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры.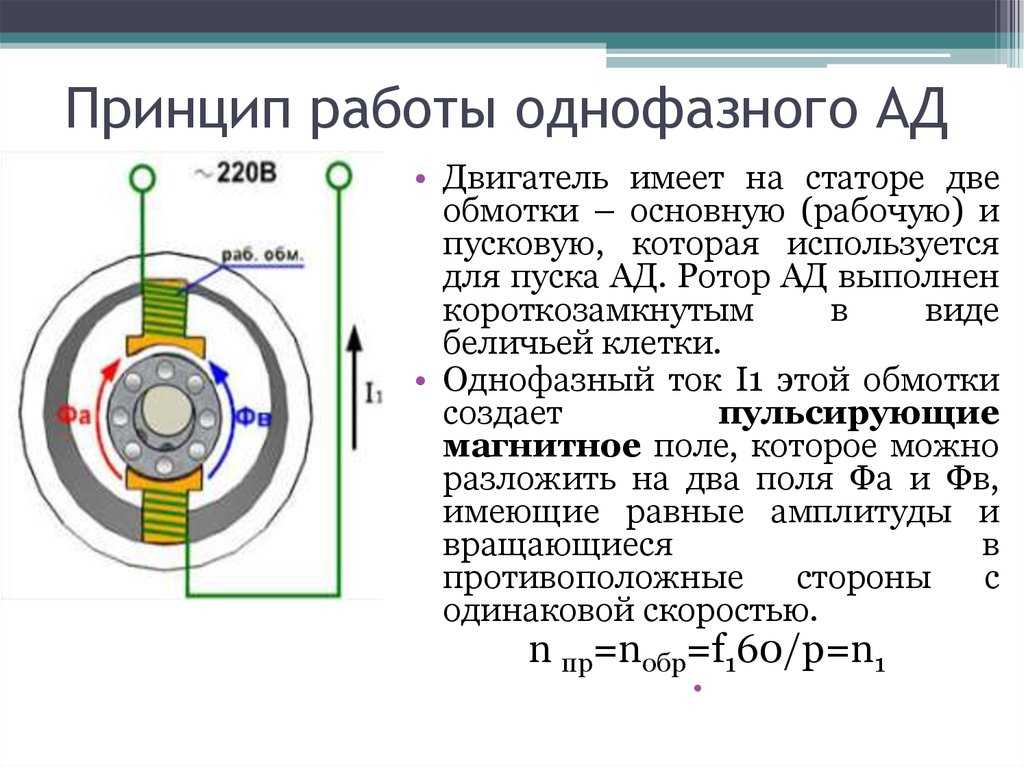
Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.
Нагрузочный режим.
Чем больше нагрузочный момент на валу, тем больше скольжение и тем меньше частота вращения ротора. Увеличение скольжения при возрастании момента объясняется следующим образом. При увеличении нагрузки на валу ротора он начинает тормозиться и частота его вращения т уменьшается.
Но одновременно увеличивается частота n1— n персечения вращающимся полем проводников обмотки ротора, а следовательно, э. д. с. Е2, индуцированная в этой обмотке, ток в роторе I2 и образованный им электромагнитный вращающий момент М. Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом Мвн.
Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом Мвн.
При достижении равенства моментов М = Мвн торможение прекратится и двигатель будет снова вращаться с постоянной частотой вращения, но меньшей, чем до увеличения нагрузки. При уменьшении нагрузочного момента Мвн частота вращения ротора по той же причине будет увеличиваться. Обычно при номинальной нагрузке скольжение для двигателей средней и большой мощности составляет 2—4 %, а для двигателей малой мощности от 5 до 7,5 %.
При работе двигателя под нагрузкой по обмоткам его статора и ротора проходят токи i1 и i2. Частота тока в обмотках статора f1 и ротора f2 определяется частотой пересечения вращающимся магнитным полем проводников соответствующей обмотки. Обмотка статора пересекается магнитным полем с частотой n1, а обмотка вращающегося ротора — с частотой n1 — n. Следовательно,
Следовательно,
f2/f1 = (n1— n)/n1= s или f2 = f1s (83)
Передача электрической энергии из статора в ротор происходит так же, как и в трансформаторе. Двигатель потребляет из сети электрическую мощность Pэл = 3U1I1cosφ1 и отдает приводимому им во вращение механизму механическую мощность Рмх (рис. 260).
Рис. 260. Энергетическая диаграмма асинхронного двигателя
В процессе преобразования энергии в машине имеют место потери мощности: электрические в обмотках статора ΔРэл1 и ротора ΔРэл2, магнитные ΔРм от гистерезиса и вихревых токов в ферромагнитных частях машины и механические ΔРмх от трения в подшипниках и вращающихся частей о воздух.
Из статора в ротор вращающимся электромагнитным полем передается электромагнитная мощность Pэм роторе она превращается в механическую мощность ротора Р’мх. Полезная механическая мощность на валу двигателя Pмх меньше мощности Р’мх на значение потерь мощности на трение ?Рмх.
Полезная механическая мощность на валу двигателя Pмх меньше мощности Р’мх на значение потерь мощности на трение ?Рмх.
При возрастании механической нагрузки на валу двигателя увеличивается ток I2. В соответствии с этим возрастает и ток I1 в обмотке статора.
Электромагнитный момент М создается в асинхронном двигателе в результате взаимодействия вращающегося магнитного поля с током I2, индуцируемым им в проводниках обмотки статора. Однако в создании его участвует не весь ток I2, а только его активная составляющая I2cosφ2 (здесь φ2 — угол сдвига фаз между током I2 и э. д. с. Е2 в обмотке ротора).
Поэтому
M = cмФтI2 cosφ2 (84)
где
Фт — амплитуда магнитного потока, созданного обмоткой статора;
cм — постоянная, определяемая конструктивными параметрами данной машины и не зависящая от режима ее работы.
Поясним физический смысл формулы (84). На рис. 261 изображен ротор двухполюсного асинхронного двигателя в развернутом виде, на котором кружками показаны поперечные сечения проводников.
Крестики и точки внутри проводников обозначают направление в них тока i2, а под проводниками — направление индуцированных э. д. с. e2, которые пропорциональны индукции В в данной точке воздушного зазора между статором и ротором. Кривая В показывает распределение вдоль окружности ротора индукции, создаваемой вращающимся магнитным полем, кривая i2 — распределение тока в проводниках, а кривая f — распределение электромагнитных сил, возникающих в результате взаимодействия тока (а с вращающимся магнитным полем.
Электромагнитный вращающий момент М, создаваемый в результате совместного действия всех сил f, будет пропорционален среднему значению электромагнитной силы fср. Легко заметить, что к проводникам, лежащим на дуге, равной 180° — φ2, приложены силы f, увлекающие ротор за вращающимся магнитным полем, а на дуге φ2 — тормозящие силы. Поэтому при неизменном токе I2 среднее значение электромагнитной силы fср, а следовательно, и электромагнитный момент М будут тем больше, чем меньше угол φ2. Электромагнитный момент М зависит от скольжения s.
Поэтому при неизменном токе I2 среднее значение электромагнитной силы fср, а следовательно, и электромагнитный момент М будут тем больше, чем меньше угол φ2. Электромагнитный момент М зависит от скольжения s.
Рис. 261. Распределение индукции В, тока i2 и электромагнитных сил f, действующих на проводники асинхронного двигателя
Так, при увеличении скольжения возрастает э. д. с. Е2 в обмотке ротора и ток I2. Однако одновременно уменьшается cosφ2, так как активное сопротивление обмотки ротора R2 остается неизменным, а реактивное Х2 увеличивается (возрастает частота тока f2 в обмотке ротора).
При s < 10-20% увеличение скольжения приводит к незначительному уменьшению cos φ2, вследствие чего активная составляющая тока в обмотке ротора I2cos φ2 и электромагнитный момент М возрастают.
При некотором критическом скольжении sкр двигатель развивает наибольший момент Мmax, который определяет его перегрузочную способность. При дальнейшем увеличении скольжения (большем sкр) происходит резкое уменьшение cos ?2, поэтому активная составляющая тока I2cos φ2 и электромагнитный момент М уменьшаются.
При дальнейшем увеличении скольжения (большем sкр) происходит резкое уменьшение cos ?2, поэтому активная составляющая тока I2cos φ2 и электромагнитный момент М уменьшаются.
Номинальный вращающий момент Мном двигатели средней и большой мощности развивают при скольжении Sном = 2-4%.
Согласно государственным стандартам на асинхронные двигатели отношение Mmax/Mном = 1,8-2,5. Критическое скольжение sкр для мощных двигателей составляет 5—10%, для двигателей средней и малой мощности — от 10 до 20 %.
Асинхронный двигатель, как и любая электрическая машина, может работать в генераторном режиме, создавая тормозной момент. Этот режим используется для электрического торможения приводов.
Режим пуска.
В начальный момент пуска ротор двигателя неподвижен: скольжение s=1, магнитное поле пересекает ротор с максимальной частотой, индуцируя в нем наибольшую э. д. с. Е2. Так как ток в роторе I2 определяется значением э. д. с. Е2, то в начальный момент пуска он будет наибольшим. Наибольшим будет и ток в статоре.
д. с. Е2. Так как ток в роторе I2 определяется значением э. д. с. Е2, то в начальный момент пуска он будет наибольшим. Наибольшим будет и ток в статоре.
Обычно пусковой ток двигателя в 5—7 раз больше номинального. Вращающий момент Мп при пуске называется пусковым. Он обычно меньше наибольшего момента, который может развить двигатель. Для двигателей различных типов и мощностей отношение Мп/Мном = 0,7 – 1,8.
Стратегия подавления помех для асинхронного двигателя электромобиля в режиме работы с разомкнутым контуром скорости
Главная Advanced Materials Research Advanced Materials Research Vols. 479-481 Стратегия подавления помех для асинхронных…
Предварительный просмотр статьи
Аннотация:
Для любого электромобиля на дороге неизбежно влияние неопределенности параметров и некоторых видов возмущающих крутящих моментов, которые представляют собой проблему для конструкции контроллера в электромобиле. Следовательно, управление электромобилем для достижения требований безопасности при эксплуатации становится важным. В этой статье мы исследуем метод управления системой электропривода электромобиля как с теоретической, так и с прикладной точек зрения, а затем предлагаем стратегию управления подавлением помех на основе обратного контура скорости. Предлагаемый подход иллюстрируется его реализацией на экспериментальной платформе. Результаты экспериментов показали, что предложенный метод управления позволяет добиться быстрой реакции на изменение тока на рабочей частоте электромобиля и существенно подавить неблагоприятное влияние изменения тока на высокой частоте.
Следовательно, управление электромобилем для достижения требований безопасности при эксплуатации становится важным. В этой статье мы исследуем метод управления системой электропривода электромобиля как с теоретической, так и с прикладной точек зрения, а затем предлагаем стратегию управления подавлением помех на основе обратного контура скорости. Предлагаемый подход иллюстрируется его реализацией на экспериментальной платформе. Результаты экспериментов показали, что предложенный метод управления позволяет добиться быстрой реакции на изменение тока на рабочей частоте электромобиля и существенно подавить неблагоприятное влияние изменения тока на высокой частоте.
Доступ через ваше учреждение
Вас также могут заинтересовать эти электронные книги
Предварительный просмотр
Рекомендации
[1]
Q. B. Юань, Ю.С. Сюй и Дж. Б. Цзоу: MICROMOTORS, Vol. 44 (2011), № 1, стр. 31-34.
B. Юань, Ю.С. Сюй и Дж. Б. Цзоу: MICROMOTORS, Vol. 44 (2011), № 1, стр. 31-34.
Академия Google
[2]
Ф.Дж. Лин, П.Х. Шен и С.П. Хсу: IEE Proceedings Electric Power Applications, Vol. 149(2002), № 3, стр. 184-194.
Академия Google
[3]
Ф.Дж. Лин и Р.Дж. Вай: IEEE Transactions on Energy Conversion, Vol. 17 (2002), № 4, стр. 507-513.
Google Scholar
[4]
Р. Дж. Вай и Х. Х. Чанг: IEEE Transactions on Neural Networks, Vol. 15 (2002), № 2, стр. 367-382.
Дж. Вай и Х. Х. Чанг: IEEE Transactions on Neural Networks, Vol. 15 (2002), № 2, стр. 367-382.
Академия Google
[5]
В.С. Ван, Ю.Д. Ли, Г.Х. Ван, Дж. Чен и М.К. Ли: ТРУДЫ КИТАЙСКОГО ЭЛЕКТРОТЕХНИЧЕСКОГО ОБЩЕСТВА, Vol. 17 (2002), № 1, стр. 1-6.
Академия Google
[6]
Дж. Ф. Ли, К. И и С.Ю. Ван: ТРУДЫ КИТАЙСКОГО ЭЛЕКТРОТЕХНИЧЕСКОГО ОБЩЕСТВА, Vol. 17 (2002), № 5, стр. 40-44.
Академия Google
[7]
А.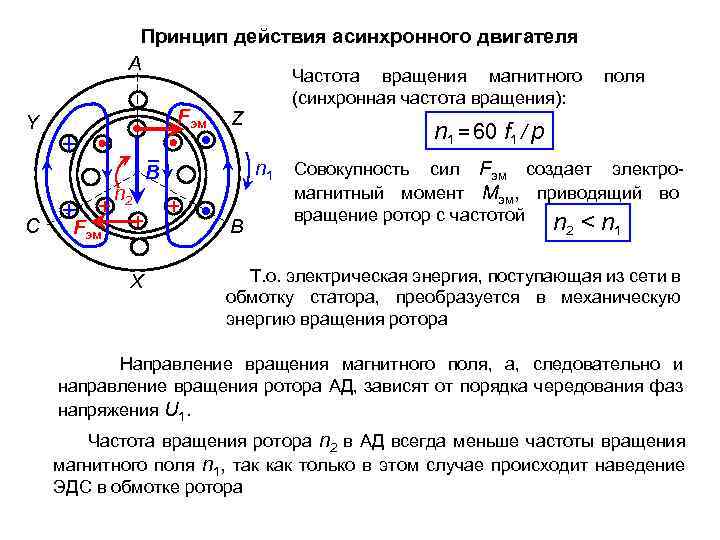 Гедтель и И.Н. да Силва, П.Дж.А. Серни: Международная конференция по силовой электронике, приводам и энергетическим системам (12-15 декабря 2006 г.), стр. 1-8.
Гедтель и И.Н. да Силва, П.Дж.А. Серни: Международная конференция по силовой электронике, приводам и энергетическим системам (12-15 декабря 2006 г.), стр. 1-8.
Академия Google
[8]
H.X. Ю и Дж.Т. Ху: КИТАЙСКИЙ ЖУРНАЛ НАУЧНЫХ ИНСТРУМЕНТОВ, Vol. 32 (2011), № 2, стр. 329-335.
Академия Google
[9]
А. Гедтель, И.Н. да Силва и П.Дж.А. Серни: Международная конференция IEEE по приложениям управления (1–3 октября 2007 г.), стр. 479.-484.
Академия Google
[10]
Л. Гаск, М. Фадель, С. Астье и Л. Калегари: Шестая международная конференция по электрическим машинам и системам, Vol. 2 (9-11 ноября 2003 г.), стр. 473-476.
Гаск, М. Фадель, С. Астье и Л. Калегари: Шестая международная конференция по электрическим машинам и системам, Vol. 2 (9-11 ноября 2003 г.), стр. 473-476.
Академия Google
[11]
Д.Дж. Сюй и Г. Ян: 35-я ежегодная конференция специалистов по силовой электронике IEEE, Vol. 5 (20-25 июня 2004 г.), стр. 3256-3259.
Академия Google
[12]
Г. Чжэн, Дж. К. Цзоу и Х. Б. Сюй: ACTA PHYSICA SINICA, 60 (6), (2011).
Академия Google
Цитируется
Разница между асинхронным двигателем и синхронным двигателем
Разница между асинхронным двигателем и синхронным двигателем объясняется с помощью различных факторов, таких как тип возбуждения, используемый для машины.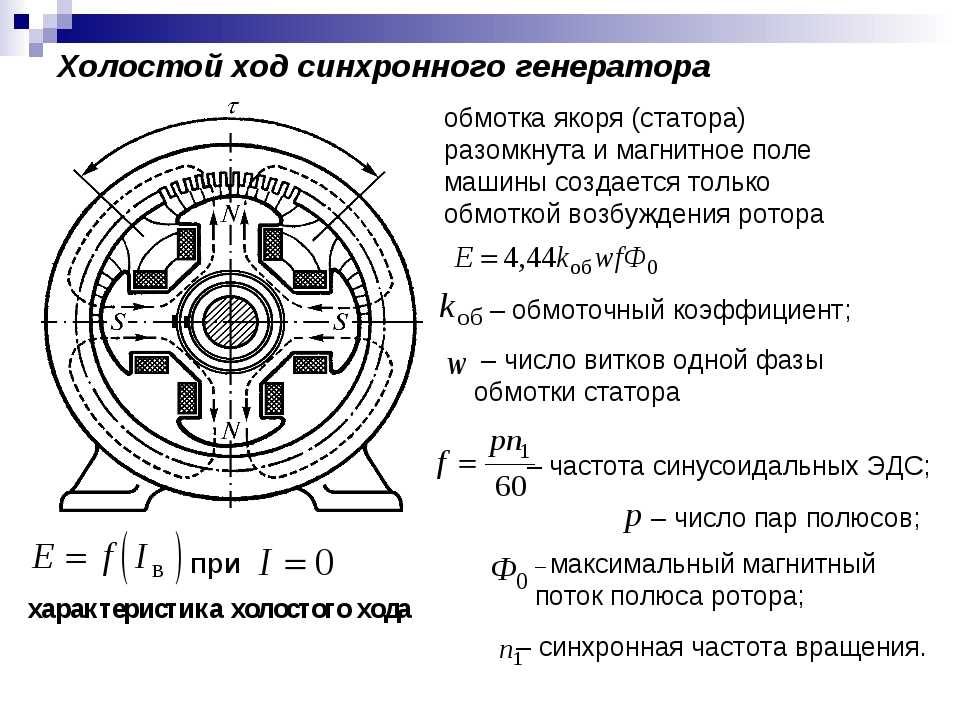 Скорость двигателя, запуск и работа, эффективность обоих двигателей, его стоимость, использование, области применения и частота.
Скорость двигателя, запуск и работа, эффективность обоих двигателей, его стоимость, использование, области применения и частота.
| ОСНОВА РАЗНИЦЫ | СИНХРОННЫЙ ДВИГАТЕЛЬ | АИНХРОННЫЙ ДВИГАТЕЛЬ |
|---|---|---|
| Тип возбуждения | Синхронный двигатель представляет собой машину с двойным возбуждением. | Асинхронный двигатель представляет собой машину с одним возбуждением. |
| Система питания | Обмотка якоря питается от источника переменного тока, а обмотка возбуждения — от источника постоянного тока. | Обмотка статора питается от источника переменного тока. |
| Скорость | Всегда работает на синхронной скорости. Скорость не зависит от нагрузки. | При увеличении нагрузки скорость асинхронного двигателя уменьшается. Она всегда меньше синхронной скорости. |
| Запуск | Самозапуск невозможен. Прежде чем синхронизировать его с источником переменного тока, его необходимо любым способом довести до синхронной скорости.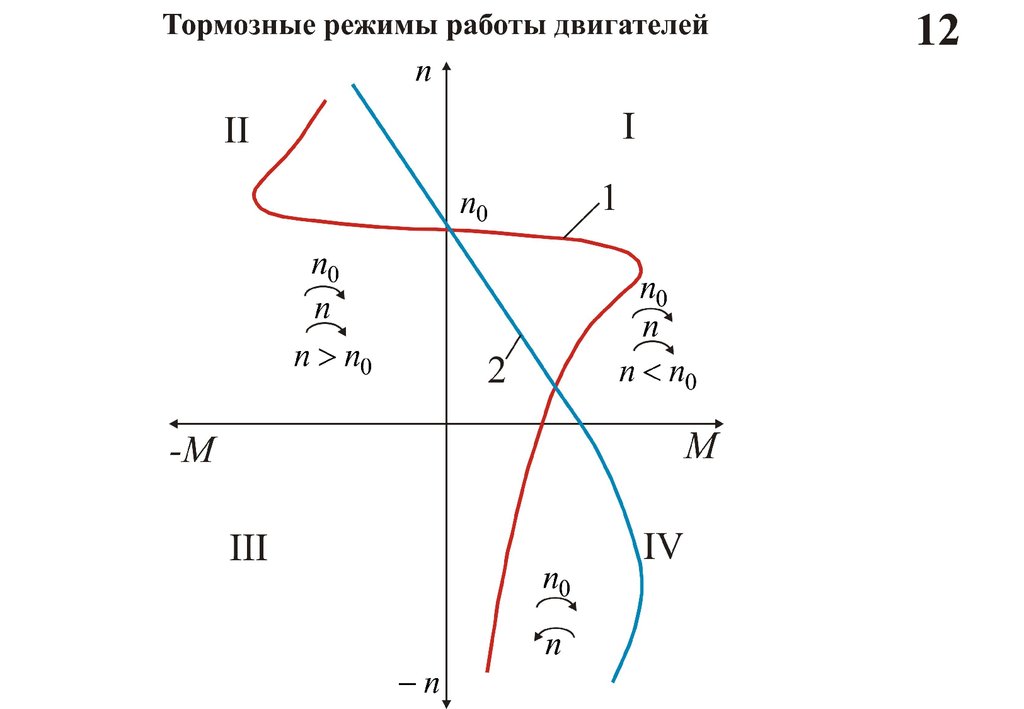 | Асинхронный двигатель имеет момент самозапуска. |
| Операция | Синхронный двигатель может работать с отстающей и опережающей мощностью путем изменения его возбуждения. | Асинхронный двигатель работает только с отстающим коэффициентом мощности. При высоких нагрузках коэффициент мощности становится очень низким. |
| Применение | Может использоваться для коррекции коэффициента мощности в дополнение к передаче крутящего момента для привода механических нагрузок. | Асинхронный двигатель используется только для привода механических нагрузок. |
| Эффективность | Он более эффективен, чем асинхронный двигатель той же мощности и номинального напряжения. | КПД ниже, чем у синхронного двигателя той же мощности и номинального напряжения. |
| Стоимость | Синхронный двигатель дороже, чем асинхронный двигатель той же мощности и номинального напряжения | Асинхронный двигатель дешевле, чем синхронный двигатель той же мощности и номинального напряжения. |
Асинхронный двигатель также известен как Асинхронный двигатель . Он так называется, потому что никогда не работает на синхронной скорости. т. е. N s = 120f/P . Асинхронный двигатель является наиболее широко используемым двигателем во всех бытовых и коммерческих двигателях. Синхронный двигатель всегда следует синхронной скорости. Скорость ротора поддерживается или синхронизируется с током питания.
- Трехфазный синхронный двигатель представляет собой машину с двойным возбуждением, тогда как асинхронный двигатель представляет собой машину с одним возбуждением.
- Обмотка якоря синхронного двигателя питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока. Обмотка статора асинхронного двигателя питается от источника переменного тока.
- Синхронный двигатель всегда работает на синхронной скорости, и скорость двигателя не зависит от нагрузки, но асинхронный двигатель всегда работает на меньшей скорости, чем синхронная.