Содержание
Реверс по цепи возбуждения машин постоянного тока независимого возбуждения
Дата Автор ElectricianКомментироватьПросмотров: 15 920
Для изменения направления вращения машин постоянного тока (реверс) необходимо изменить полярность питающего напряжения. Это можно сделать двумя способами – изменить полярность напряжения на якоре или обмотке возбуждения. В данной статье мы рассмотрим изменение направления вращения с помощью цепи возбуждения.
Главным преимуществом реверса по цепи возбуждения – это ее малая мощность даже для машин большой мощности. Мощность данной цепи не превышает нескольких десятков киловатт даже для машин большой мощности. Например, для ДПТ с номинальным током якоря 6000 А и напряжением 1000 В параметры обмотки возбуждения составляют U = 300 B, I = 250 A. Соответственно гораздо выгодней реверсировать такую машину по цепи возбуждения, чем по якорной цепи.
Однако при реверсе магнитного потока ухудшатся условия коммутации коллектора. Более того обмотка возбуждения имеет очень большую инерционность, по сравнению с якорной обмоткой. Для электроприводов большой мощности постоянная времени возбуждения может составлять порядка 1 – 3 секунд, а полный реверс при нормальных условиях может быть осуществлен за 10 и более секунд, что существенно влияет на быстродействие всей системы электропривода. Для ускорения процесса реверса осуществляют так называемую форсировку возбуждения. Для этого на обмотку возбуждения подают повышенное напряжение, превышающее номинальное в 2 – 5 раз. Ток при этом нарастает быстрее, чем при номинальном напряжении, и когда он достигает заданного значения, напряжения снижается до уровня номинального. При постоянной времени обмотки возбуждения в 2 секунды и при использовании форсировки можно осуществить реверс за 0,5 секунды.
Более того обмотка возбуждения имеет очень большую инерционность, по сравнению с якорной обмоткой. Для электроприводов большой мощности постоянная времени возбуждения может составлять порядка 1 – 3 секунд, а полный реверс при нормальных условиях может быть осуществлен за 10 и более секунд, что существенно влияет на быстродействие всей системы электропривода. Для ускорения процесса реверса осуществляют так называемую форсировку возбуждения. Для этого на обмотку возбуждения подают повышенное напряжение, превышающее номинальное в 2 – 5 раз. Ток при этом нарастает быстрее, чем при номинальном напряжении, и когда он достигает заданного значения, напряжения снижается до уровня номинального. При постоянной времени обмотки возбуждения в 2 секунды и при использовании форсировки можно осуществить реверс за 0,5 секунды.
Проведение реверса ДПТ НВ в цепи возбуждения может быть проведен с помощью реверсивного двухкомплектного тиристорного преобразователя (схема 4) или же с помощью контактного реверсора (схема 5).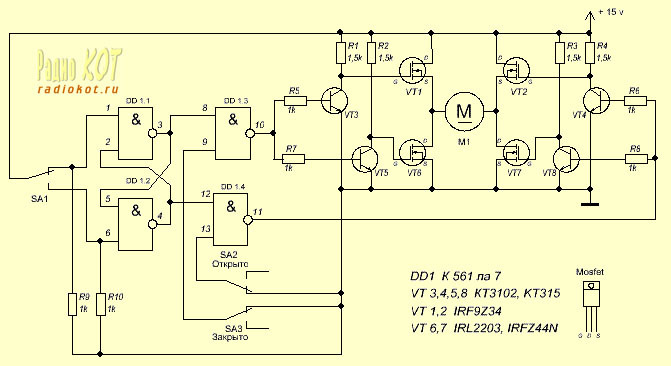 Также для ускорения реверсирования при уменьшения тока до нуля используют инверторный режим работы тиристорного преобразователя. При этом обмотка возбуждения выступает в качестве генератора, отдавая энергию в сеть через инвертор. После снижения тока до нуля его знак изменяется на противоположный. При этом тиристорный преобразователь якорной цепи переходит в рекуперативный режим работы (отдача энергии в сеть), поддерживая при этом заданный тормозной момент. После остановки электродвигатель начинает вращаться в обратную сторону.
Также для ускорения реверсирования при уменьшения тока до нуля используют инверторный режим работы тиристорного преобразователя. При этом обмотка возбуждения выступает в качестве генератора, отдавая энергию в сеть через инвертор. После снижения тока до нуля его знак изменяется на противоположный. При этом тиристорный преобразователь якорной цепи переходит в рекуперативный режим работы (отдача энергии в сеть), поддерживая при этом заданный тормозной момент. После остановки электродвигатель начинает вращаться в обратную сторону.
Процессы, происходящие в электродвигателе постоянного тока показаны ниже:
В прямом направлении двигатель будет вращаться без нагрузки в момент времени t1. При этом напряжение будет равно номинальному и подано оно из преобразователя 1, который будет находится в проводящем состоянии. Угол управления при этом будет равен 700. В таком случае UB = UBmaxcos700 = 0.34Umax. Umax – максимальное напряжение преобразователя при угле управления равном нулю.
В момент t2 начнется реверс. С начала напряжение силового канала снижается до нуля Uя = 0. При U<Eя в якорной цепи перестанет протекать ток, после чего угол преобразователя 1 изменится с 700 до 1700. Он перейдет в режим инвертора с напряжением случае UB = UBmaxcos1700 = — 0.98Umax. Данное напряжение практически в 3 раза превысит номинальное, чем обеспечится форсирование скорости нарастания тока. Ея снижается вместе с током возбуждения.
В момент t3 IВ и ЭДС якоря Ея будут равны нулю. В этот же момент времени блокируется подача импульсов управления на первый преобразователь (1) и до момента t4 обеспечивается пауза длительностью 10 – 20 мс, характерная для электроприводов с раздельным управлением.
В момент времени t4 начинается подача импульсов управления на преобразователь 2, который обеспечивает форсировку тока возбуждения.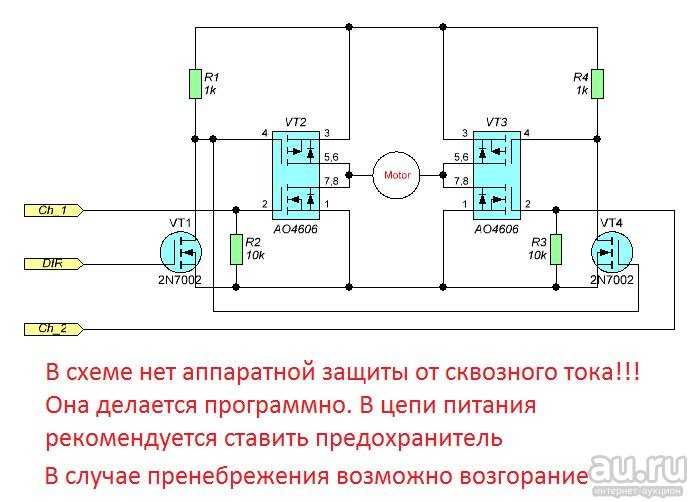 Его угол управления равен примерно 100, что соответствует UB = -UBmaxcos100 = -0.98Umax. С момента t4 начинается торможения машины постоянного тока с отдачей энергии в сеть при заданном токе якоре.
Его угол управления равен примерно 100, что соответствует UB = -UBmaxcos100 = -0.98Umax. С момента t4 начинается торможения машины постоянного тока с отдачей энергии в сеть при заданном токе якоре.
В t5 Iв достигает своего максимального отрицательного значения и угол управления преобразователя 2 снижается до 700, обеспечивая при этом номинальное напряжение и ток обмотки возбуждения.
В момент времени t6 скорость электродвигателя равна нулю. С этого момента он начинает свой разгон в обратном направлении вращения. В момент t7 скорость вращения вала достигает номинальной, а в момент t8 происходит наброс нагрузки.
Система управления электроприводом собранная по схеме 5, точно также как и собранная по схеме 4, несмотря на используемую форсировку напряжения, имеют быстродействие значительно ниже, чем при использовании схемы реверса по якорной цепи. Хотя стоит отметить, что общее время реверса электропривода во многом зависит от механической инерционности всей системы в целом.
Хотя стоит отметить, что общее время реверса электропривода во многом зависит от механической инерционности всей системы в целом.
Posted in Электропривод
Как правильно выполняется реверсивное управление двигателями постоянного тока электродвижка ардуино
Схема управления двигателем постоянного тока, реверсирование и реверсивное управление мотором
Реверсирование и замедление двигателей постоянного тока электронный механизм arduino и электронная схема управления.
Основная схема пластического запуска и остановки без содействия переключателей в обе стороны. Главной опорой данной схемы стоит простой резистор, который удерживает вращение прибора в среднем состоянии, а при крайних плавно начинает вращать электродвигатель в обоих направлениях. Такое применение подходит для 12в электромотора, его питания и схемы в целом, также управления при неизменном потоке, которое подробно описано далее.
Включение неизменчивого тока прямым запуском, возможно только с механизмами малой мощности (допустимый пик тока 4-6 кратно номинального).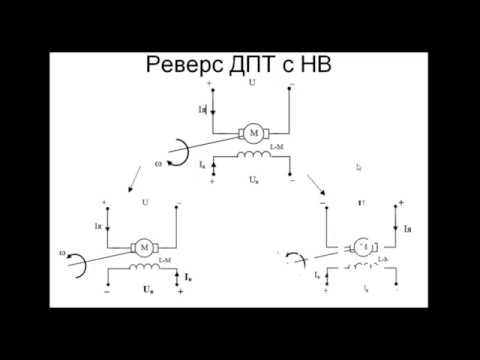 Пуск постоянного течения в носителях с более сильным мотором совершается с использованием пускового реостата, он же и регулирует допустимые значения для поддержки механической прочности, как это было описано в схеме.
Пуск постоянного течения в носителях с более сильным мотором совершается с использованием пускового реостата, он же и регулирует допустимые значения для поддержки механической прочности, как это было описано в схеме.
Нормальный ток необходим при запуске движок, должен развивать довольно большой разгон. Для этого акселерометр последовательно уменьшает сопротивление при перемене рычага с одного неподвижного контакта на другой. Снижение сопротивления также возможно замыкания ненадолго секций, с помощью контакторов. В противовес пускового, регулировочный реостат рассчитан на долговременное прохождение тока. Но, происходит большая потеря энергии во время работы инструмента, результатом чего кпд в моторе убавляется.
При ручном запуске или автомате, ток меняется от максимально допустимого, 1,8-2,5 – кратному номинальному в начале, и при противодействии аппаратуры до минимального, 1,1 – 1,5 кратному номинальному в конце. Также такие значения будут при переключении на другое положение пускового реостата.
Реверсирование
Реверсирование – смена вращений двигателя, в котором нужно переключиться на обмотку или якорь, но для верпа сила будет течь в другом направлении. Так званые регуляторы, которые используются для моторчиков с неизменным течением. Реверс используется переменой фаз в сети переменного тока. Возможно в автоматическом действии с заменой сигнала, и также после определения нужного действия на логический вход. В обоих случаях направление искры в якоре будет противоположным.
Основные тактики для возврата механизма:
- Контакторный, используется очень редко.
- Статический способ. В основном это изменение полярности или направления тока.
- Реверсирование с магнитным пускателем.
- Реверс электродвижка с асинхронными прямыми частотными преобразователями. Используется вместе с векторным управлением в замкнутой системе и датчиком обратной связи. Аналогично и регулирование аккумулятора с непрерывным током.
Реверс с постоянными магнитами производится с помощью изменения полярности питания пусковых устройств, тогда ротор начинает вращаться в другую сторону. В этом случае можно регулировать скорость вращения. В основном управление происходит по 2-х проводной линии (тиристорами). Также изменения реверсивности на большой мощности следует на якоре. Неправильное возбуждение обмотки производит к неисправностям, из-за повышенного напряжения возможна изоляция обмоток и выход аппарата из строя. Поэтому нужно правильно собрать оборудования по технической характеристике.
В этом случае можно регулировать скорость вращения. В основном управление происходит по 2-х проводной линии (тиристорами). Также изменения реверсивности на большой мощности следует на якоре. Неправильное возбуждение обмотки производит к неисправностям, из-за повышенного напряжения возможна изоляция обмоток и выход аппарата из строя. Поэтому нужно правильно собрать оборудования по технической характеристике.
Осуществляется реверс моторов последовательного возбуждения возможно с помощью переходов или обвиванием возбуждения якоря, потому что энергические запасы в якорях и обвивках не очень большие и время непрерывного переключения небольшие.
Возвращение с параллельным возбуждением в якоре сначала нужно отключить от питания, поэтому моторчик автоматически тормозится. Когда он заканчивает тормозить, якорь переключается, если он не переключился во время торможения, тогда запуск начинается при вращении в обратную сторону. В той же градации придерживается и реверсирование для последовательного возбуждения:
- Выключение
- Замедление
- Переключение
- Пуск в обратную сторону
Реверс основного инструмента с разнообразным включением нужно перевести на якорек или прямую обмотку разом с параллельной обмоткой.
Пуск и торможение
Торможение с постоянным током связано с, конечно же, мощностью. Поскольку прямое подключение возможно на малых мощностях сердца аппарата, во всех следующих обстоятельствах можно использовать только пусковой реостат. Он определяет позволенные значения и определяет допустимый ток.
Реостат представляет собою провод, рассортирован на секции с большим сопротивлением. В переходах зафиксированы медные кнопочки или контакты, к ним можно присоединять провод. При запуске сопротивление оборудования должно уменьшаться по порядку. Чтобы уменьшить время работы мотора, нужно замедление, так как при его отсутствии может быть слишком большое количество. Также замедление нужно для фиксирования приводимых приборов в нужном порядке положения.
Выключение возможно на двух типов: электрическое и механическое
Механистическая остановка в основном делается с помощью накладки колодок на тормозной шкив. Нехватка самопроизвольного тормоза: Момент остановки невозможно предугадать из-за случайностей. Если масло, или жидкость попадет на шкив тормоза данное замедление возможно, когда период времени и тормозного пути не ограничены.
Если масло, или жидкость попадет на шкив тормоза данное замедление возможно, когда период времени и тормозного пути не ограничены.
В аварийных ситуациях после прежнего электрического торможения на небольшом темпе движения можно сделать полную остановку инструмента. Зафиксировать положение прибора в определенном месте.
Электрическая остановка создает точный момент торможения. Так как фиксация невозможна в нужном месте, механическим путем оно дополняется и входит в работу после окончания работы электрического. Такой тормоз возможен, когда ток идет в траектории согласно ЭДС движка.
Доступные три вида торможения:
- Стоп мотора беспрестанного потока с возвращением энергии. Кинетическая энергия должна превратиться в электрическую, часть с которой попадает обратно в сеть. Стоп выполнено, когда напряжение уменьшается при любом загруженности машинного оборудования.
- При противоположном включении. С помощью вращающегося аппарата переключается на противоположное направление вращения.
 В нем напряжение складывается, следовательно, нужно включить резистор для ограничения силы с сопротивлением. Такое замедление берет большую затрату энергии.
В нем напряжение складывается, следовательно, нужно включить резистор для ограничения силы с сопротивлением. Такое замедление берет большую затрату энергии. - Динамическое. Делается при включении на зажимах в сердце резистора мотора. Кинетическая запасная энергия превращается в электрическую энергию и рассеивается. Такое замедление очень распространенный.
 В нем напряжение складывается, следовательно, нужно включить резистор для ограничения силы с сопротивлением. Такое замедление берет большую затрату энергии.
В нем напряжение складывается, следовательно, нужно включить резистор для ограничения силы с сопротивлением. Такое замедление берет большую затрату энергии.Пуск, возврат и замедление двигателей постоянного тока выполняется с соблюдением технологических требований и правилам безопасности.
Arduino возврат электромотора для 12 вольтовых инструментов
При собирании моделей часто используются малые щеточные электромоторы с постоянным током. Для их управления используется микроконтроллер arduino, который запрограммирован к ручному управлению.
Поэтому, если вращения в нем предполагается в одну сторону с небольшой мощностью в двигателе, а также напряжения от 3,3 до 5ти Вт, то схему можно упростить.
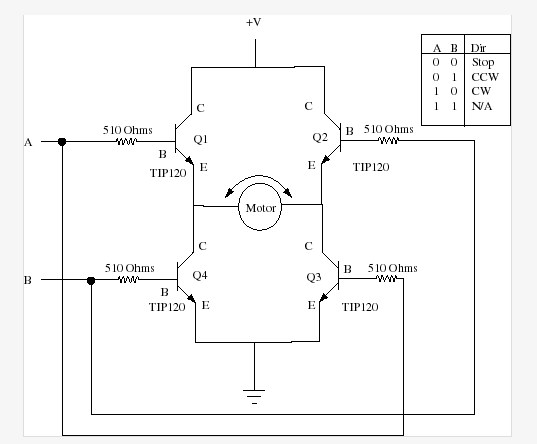
В такой модели дистанционного управления нужно использовать возвращение моторов с мощностью более 5 Вт. В данном микроконтроллере используют ключи, сделанные по мостовой схеме. Ниже на картинке можно увидеть универсальную схему подключения двигателя с реверсом на ардуино. Таким способом могут использоваться полевые транзисторы или драйвер (специально изготовление устройство), оно помогает подключить мощные моторчики. Собирать данную схему должен обученный специалист, при самостоятельном установлении нужно соблюдать меры безопасности.
В данном микроконтроллере используют ключи, сделанные по мостовой схеме. Ниже на картинке можно увидеть универсальную схему подключения двигателя с реверсом на ардуино. Таким способом могут использоваться полевые транзисторы или драйвер (специально изготовление устройство), оно помогает подключить мощные моторчики. Собирать данную схему должен обученный специалист, при самостоятельном установлении нужно соблюдать меры безопасности.
Заключение: Реверсирование и выключение приборов постоянного тока является очень гибким приводным приборам, которое используется там, где не нужны большие моменты при старте. Механизм имеет надежные цепи регулировки скорости вращения и простой при запуске в ход орудия.
Являются ли двигатели постоянного тока реверсивными? — Прецизионные микроприводы
Проще говоря, двигатели постоянного тока могут вращаться в любом направлении (по часовой стрелке или против часовой стрелки), и ими легко управлять, меняя полярность приложенного напряжения.
Строго говоря, двигатели могут создавать силу в любом направлении. Мы делаем это важное различие, потому что в некоторых приложениях, таких как тактильная обратная связь, используется «торможение» для управления двигателем без фактического вращения в противоположном направлении. Если двигатель уже находится в движении, приложенное напряжение может быть инвертировано, и двигатель будет быстро замедляться, в конечном итоге останавливаясь. Если напряжение продолжает поступать, двигатель снова начнет вращаться в соответствии с полярностью напряжения.
Правило левой руки Флеминга и двигатели постоянного тока
Направление силы и, следовательно, вращение объясняется с помощью правила левой руки Флеминга для двигателей.
Во-первых, мы будем использовать (очень) упрощенную модель двигателя — представьте два магнита с противоположными полюсами (N и S), разделенные небольшим воздушным зазором, с проводом между ними, по которому течет электрический ток. По сути, так устроен двигатель, хотя в этом упрощенном примере мы представляем однополюсные магниты бесконечной длины, чтобы не вводить такие усложнения, как коммутатор. Эта концепция прекрасно подходит для объяснения важной части теории.
Эта концепция прекрасно подходит для объяснения важной части теории.
Свяжитесь с нами по телефону
Поговорите с членом нашей команды.
Каталог двигателей
Ищете нашу продукцию?
Надежные, экономичные миниатюрные механизмы и двигатели, отвечающие вашим требованиям.
Когда проводу позволяют свободно двигаться и по нему протекает ток через магнитное поле, на провод действует сила, заставляющая его двигаться. В двигателе катушки могут быть прикреплены к ротору, поэтому, когда сила действует на провод, это вызывает вращение вала. На нашей упрощенной диаграмме мы можем сказать, что движение провода влево эквивалентно вращению двигателя против часовой стрелки, а движение вправо — по часовой стрелке.
Теперь применим правило левой руки Флеминга, чтобы определить направление силы. Результирующая сила перпендикулярна как магнитному полю, так и направлению тока. Используя положение руки на изображении в верхней части статьи, вы можете расположить свою левую руку как на изображении ниже. Возможно, вы захотите подождать, пока останетесь одни в офисе, потому что вы будете выглядеть довольно странно!
Возможно, вы захотите подождать, пока останетесь одни в офисе, потому что вы будете выглядеть довольно странно!
- Ваш указательный палец представляет собой магнитное поле, указывающее прямо на пол.
- Ваш средний палец представляет ток и указывает на экран компьютера.
- Большой палец представляет результирующую силу, которая указывает влево.
Это показывает нам, что ток, протекающий по проводу «в» экран компьютера, вызывает силу, толкающую влево, в нашей модели это эквивалентно вращению двигателя против часовой стрелки.
Теперь нас больше всего интересует, как изменить силу, чтобы проволока двигалась в противоположном направлении, заставляя наш двигатель вращаться «в обратном направлении». Мы можем снова использовать правило левой руки Флеминга с тем же магнитным полем, но на этот раз большим пальцем будем указывать вправо, а не влево. В результате ваш средний палец теперь должен указывать на вас, показывая ток, вытекающий из экрана.
Это показывает, что для того, чтобы заставить двигатель вращаться по часовой стрелке, мы должны изменить направление потока тока (т. е. изменение потока тока изменяет направление силы на 180 градусов).
Разумеется, направление тока определяется полярностью напряжения. Таким образом, чтобы изменить направление вращения, мы можем просто изменить напряжение, заставив ток течь в противоположном направлении, изменив силу на 180 градусов, и двигатель будет вращаться «назад».
Практические выводы – как изменить напряжение
Если вы не знакомы с электроникой, изменение полярности напряжения может показаться более сложным, чем оно есть на самом деле. На самом деле, вы, скорее всего, будете бороться с логикой управления — то есть решать и командовать, когда менять полярность. Вы можете легко управлять двигателем в любом направлении с помощью одного чипа, однако это зависит от вашего приложения.
Давайте возьмем два примера приложений, которые управляют двигателем в любом направлении, механизм блокировки и устройство тактильной обратной связи.
В запорном механизме используется мотор-редуктор, который приводится в движение в любом направлении, чтобы запереть или отпереть дверь. Когда двигателю необходимо фактически вращаться как по часовой стрелке, так и против часовой стрелки, одна из самых популярных управляющих микросхем называется Н-мост. Это дискретные компоненты, в которых размещены 4 транзистора, действующие как переключатели, одна пара переключателей используется для управления двигателем в одном направлении, а два других используются для обратного направления. Управление направлением двигателя (часто простые сигналы GPIO) осуществляется отдельно от напряжения привода, которое управляет скоростью, поэтому вы можете изменять их независимо друг от друга.
И наоборот, устройства с тактильной обратной связью реализуют «активное торможение», которое используется для более быстрой остановки двигателя и повышения четкости эффектов. Здесь двигатель фактически не вращается в противоположном направлении ни в какой точке, вместо этого мы используем эффекты обратного напряжения для более точного управления двигателем. Многие тактильные чипы реализуют активное торможение по умолчанию либо как настройку в чипе, либо как часть предварительно запрограммированной формы сигнала, что делает его очень простым в реализации.
Многие тактильные чипы реализуют активное торможение по умолчанию либо как настройку в чипе, либо как часть предварительно запрограммированной формы сигнала, что делает его очень простым в реализации.
Узнайте больше
Ресурсы и руководства
Ознакомьтесь с рекомендациями по применению наших продуктов, руководствами по проектированию, новостями и примерами из практики.
Прецизионные микроприводы
Нужен ли вам компонент двигателя или полностью проверенный и испытанный сложный механизм — мы здесь, чтобы помочь. Узнайте больше о нашей компании.
- Почему PMD
- О нас
- Двигатели
- Механизмы
- Карьера
Как изменить направление вращения двигателя постоянного тока
15 августа 2022 г.
Итак, вы приобрели двигатель постоянного тока, потратили время на его установку и при запуске заметили, что выходной вал вращается в неправильном для вашего применения направлении. Вы неправильно установили? Можете ли вы изменить направление вашего нового двигателя, или вам придется заменить его еще раз?
Вы неправильно установили? Можете ли вы изменить направление вашего нового двигателя, или вам придется заменить его еще раз?
Являются ли двигатели постоянного тока реверсивными?
Являются ли двигатели постоянного тока реверсивными? Да! Двигатели постоянного тока могут работать как по часовой, так и против часовой стрелки. Этим изменением направления можно легко управлять, просто инвертируя полярность приложенного напряжения. Мы обсудим это позже.
Зачем менять направление вращения двигателя постоянного тока?
Изменение полярности магнитного поля вашего двигателя постоянного тока можно использовать для замедления, остановки или изменения направления силы вращения двигателя. Но зачем кому-то это делать?
Электродвигатель гаражных ворот создает усилие в одном направлении, чтобы открыть дверь, а затем должен изменить направление, чтобы снова закрыть дверь. Подъемник должен двигаться как вверх, так и вниз. Ваша посудомоечная машина накачивает воду в чашу, а затем снова выливает ее в конце цикла. Некоторые вентиляционные вентиляторы движутся в обоих направлениях, либо нагнетая воздух в здание, либо выталкивая его из здания.
Некоторые вентиляционные вентиляторы движутся в обоих направлениях, либо нагнетая воздух в здание, либо выталкивая его из здания.
Могут даже возникнуть ситуации, когда вы захотите быстро остановить двигатель постоянного тока, но у вас не установлен электрический или механический тормоз. Изменение полярности напряжения питания создает силу в противоположном направлении, помогая двигателю быстро остановиться.
Как видите, существует множество практических ситуаций, когда можно изменить направление вращения типичного двигателя постоянного тока. Но как эти приложения делают его таким простым?
Как изменить направление вращения двигателя постоянного тока
Ваш двигатель постоянного тока можно настроить на вращение в любом направлении, просто изменив полярность подаваемого напряжения. Изменение потока тока меняет направление силы вращения, в результате чего вал двигателя начинает вращаться в противоположном направлении.
Вы можете изменить направление вращения двигателя постоянного тока двумя способами. Вы можете изменить полярность цепи на питании или в обмотках возбуждения. Или можно поменять полярность в обмотке якоря.
Вы можете изменить полярность цепи на питании или в обмотках возбуждения. Или можно поменять полярность в обмотке якоря.
Небольшое предостережение: ваш двигатель, скорее всего, оснащен угольными щетками со скошенными краями. Этот скошенный край помогает щетке легко проходить по коллектору.
Изменение направления вращения двигателя приведет к тому, что угольные щетки будут прижаты к коллектору, что приведет к большему трению, чем в другом направлении. Это может привести к более быстрому износу угольных щеток и, если их не обслуживать должным образом, может привести к повреждению важных сегментов коллектора, которые не являются взаимозаменяемыми. Техническое описание вашего двигателя предоставит вам спецификации по эксплуатации вашего двигателя в номинальных и уникальных условиях.
Управление двигателем постоянного тока
Вы можете управлять двигателем постоянного тока тремя способами:
Ручное управление
Ручное изменение направления выводов якоря изменит полярность цепи вашего двигателя. В техническом паспорте двигателя будет указано направление двигателя на заводе, и он предоставит вам схемы, на которых показано, какие клеммы какие (положительные «+» или отрицательные «-»).
В техническом паспорте двигателя будет указано направление двигателя на заводе, и он предоставит вам схемы, на которых показано, какие клеммы какие (положительные «+» или отрицательные «-»).
Использование переключателя
Установка тумблера или ползункового переключателя в цепь позволяет пользователю контролировать полярность двигателя. Щелчок переключателя изменит направление выходного вала двигателя.
Использование схемы Н-моста
Установка переключателя DPDT. Переключатель DPDT (двухполюсный, двухпозиционный) — это четыре переключателя в одном, которые образуют схему Н-моста. Это позволяет вам управлять вашим двигателем по-разному, в зависимости от того, какие переключатели открыты или закрыты в любой момент. Следовательно, их также можно использовать для управления скоростью, а не только для запуска и остановки.
Вы должны дать двигателю замедлиться и остановиться перед переключением направления, так как быстрая смена полярности на высоких скоростях может привести к повреждению цепи двигателя, особенно если это делается регулярно.