Содержание
Торможение асинхронного двигателя
Асинхронный двигатель схемы подключения
При использовании асинхронного двигателя, в качестве составной части какого-либо электропривода, часто возникает потребность в искусственной остановке двигателя. В настоящее время существует множество различных способов торможения асинхронного двигателя, вот некоторые из них.
Динамическое (электродинамическое) торможение
Если отключить двигатель от сети переменного тока и подключить его к источнику постоянного тока, то произойдет динамическое торможение. Обмотка статора, при протекании постоянного тока, создаст неподвижное магнитное поле. При вращении в таком поле, в роторе будет наводиться ЭДС, под действием которой будет протекать ток. Этот ток будет взаимодействовать с неподвижным полем статора и создавать тормозной момент, который будет направлен против направления вращения ротора. В итоге двигатель будет постепенно останавливаться, причем скорость его остановки будет зависеть от силы постоянного тока, протекающего по статору, ну и конечно же от запасенной кинетической энергии электропривода. Эта энергия, преобразовываясь в электрическую, рассеивается в виде тепла на роторе.
В итоге двигатель будет постепенно останавливаться, причем скорость его остановки будет зависеть от силы постоянного тока, протекающего по статору, ну и конечно же от запасенной кинетической энергии электропривода. Эта энергия, преобразовываясь в электрическую, рассеивается в виде тепла на роторе.
В двигателе с фазным ротором, величину тормозного момента, а следовательно, скорость торможения, можно изменять, изменяя величину добавочных сопротивлений в цепи ротора.
Рекуперативное (генераторное) торможение
Рекуперативное торможение применяется в основном в качестве подтормаживания перед основным торможением, либо при спуске груза, например в лифтах.
Чтобы наступило рекуперативное торможение, нужно чтобы частота вращения ротора превысила синхронную частоту вращения. В таком случае двигатель начнет отдавать энергию в сеть, то есть станет асинхронным генератором. При этом электромагнитный момент двигателя становится отрицательным, и оказывает тормозной эффект.
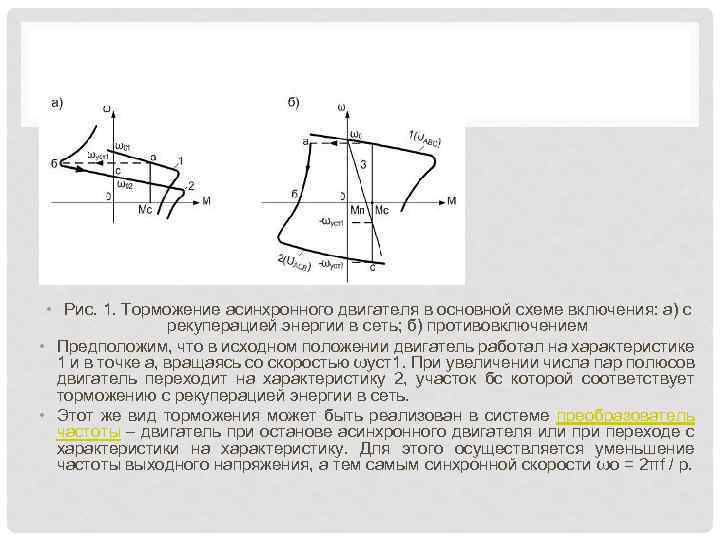
Добиться генераторного торможения можно несколькими способами. Например, в двухскоростных двигателях, при переключении с большей скорости на меньшую. При этом ротор вращается по инерции с частотой, выше, чем новая синхронная частота. Возникнет тормозной момент, который уменьшит скорость до новой номинальной.
Допустим, что в начальный момент времени наш двигатель работал на характеристике 1 в точке A, после переключения скорости на более низкую, он перешел на характеристику 2 в точку B, а затем под действием тормозного момента достиг точки С, с меньшей частотой оборотов.
Генераторное торможение можно осуществить, если уменьшать частоту питания двигателя. Это возможно, если двигатель питается от тиристорного преобразователя частоты. При уменьшении частоты напряжения, уменьшается синхронная частота вращения. Частота вращения ротора, который вращается по инерции, снова окажется выше, возникнет тормозной момент, который будет снижать частоту вращения ротора. Таким образом, двигатель можно довести до полной остановки.
Таким образом, двигатель можно довести до полной остановки.
Торможение противовключением
Торможение противовключением применяется для быстрой остановки двигателя. Оно может быть осуществлено несколькими способами. В первом способе, в работающем двигателе, меняют две фазы местами, с помощью выключения контактора K1 и включения K2. При этом направление вращения магнитного поля статора меняется на противоположное. Возникает большой тормозной момент, и двигатель быстро останавливается. Но для того чтобы ограничить большие токи в момент увеличения тормозного момента, необходимо вводить в обмотку статора или ротора дополнительное сопротивление.
Во втором способе двигатель используют как тормоз для груза. То есть, если груз спускается вниз, то двигатель должен работать, наоборот, на подъем. Для этого в цепь ротора двигателя вводится большое добавочное сопротивление. Но его пусковой момент оказывается меньше чем момент нагрузки, и двигатель работает при некоторой небольшой скорости, тем самым обеспечивая плавный спуск.
По сути, торможение противовключением осуществляется по схеме реверса двигателя.
Торможение при самовозбуждении
Если питание двигателя отключить, то его магнитное поле затухнет только через небольшой промежуток времени. Если в этот момент подключить к статорной обмотке двигателя батарею конденсаторов, то энергия магнитного поля будет переходит сначала в заряд конденсаторов, а затем снова возвращаться в обмотку статора. При этом возникнет тормозной момент, который остановит двигатель. Такое торможение часто называют конденсаторным.
Величина тормозного момента будет зависеть от емкости конденсаторов, чем больше емкость, тем больше момент
Конденсаторы могут быть включены постоянно, а могут отключаться во время работы двигателя с помощью контактора.
Можно обойтись и без конденсаторов, просто замкнув с помощью ключей SA, обмотку статора по схеме “звезда”, предварительно отключив ее от сети с помощью контактора K.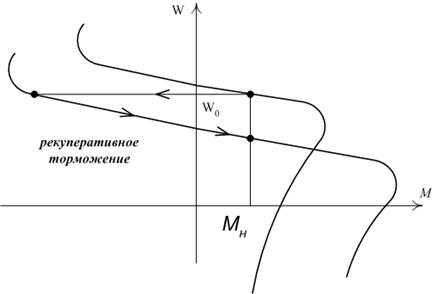 Тогда торможение произойдет значительно быстрее, за счет остаточного магнетизма двигателя. Такое торможение еще называется магнитным торможением.
Тогда торможение произойдет значительно быстрее, за счет остаточного магнетизма двигателя. Такое торможение еще называется магнитным торможением.
Рекомендуем к прочтению — регулирование скорости асинхронного двигателя
рекуперативное (генераторное) и при самовозбуждении. Тормозные характеристики.
Генераторное торможение асинхронного двигателя
Асинхронные двигатели используются с такими производственными механизмами, под действием которых их скорость вращения не может стать больше ω0, другими словами, двигатель не может перейти в генераторный режим под действием производственного механизма. Генераторный режим возникает в асинхронных двигателях, скорость которых регулируется изменением числа пар полюсов. В момент переключения с одного числа пар полюсов на другое в цепи статора двигателя происходит бросок тока, и он переходит в генераторный режим работы.
Характеристика асинхронного двигателя при рекуперативном (генераторном) торможении.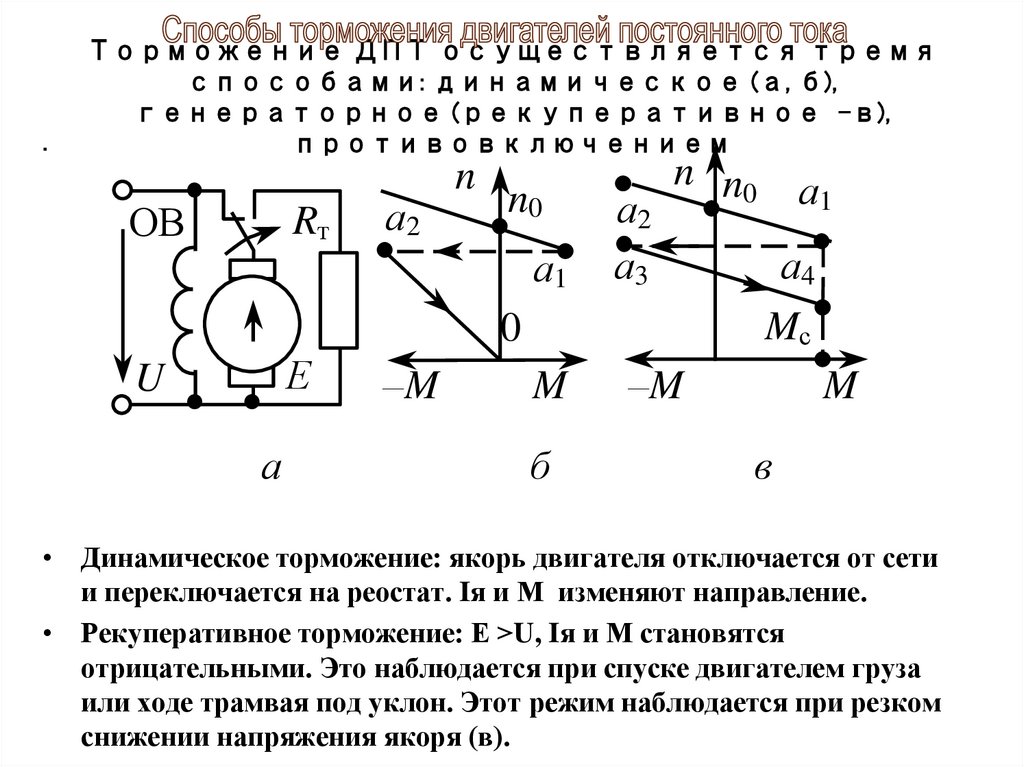
Торможение асинхронного двигателя при самовозбуждении
Торможение при самовозбуждении основано на том, что после отключения асинхронного двигателя от сети в воздушном зазоре магнитное поле будет затухать не мгновенно, а в течение какого-то промежутка времени. За счет энергии этого затухающего поля и использования специальных схем создается тормозной момент.
Одним из таких способов возбуждения является конденсаторное торможение. В момент отключения КМ1 конденсаторы C разражаются на обмотку статора.
Схема включения асинхронного двигателя при конденсаторном торможении.
Характеристика асинхронного двигателя при конденсаторном торможении, C1 < C2 < C3.
Интенсивность торможения зависит от емкости. Чем больше емкость, тем больше тормозной момент. Но так как емкости разряжаются очень быстро, то каким бы ни был тормозной момент, он очень быстро снижается и приблизительно при скорости, равной 0,5ωном тормозной момент становится равным нулю и двигатель останавливается методом свободного выбега. Можно применить в этом случае магнитное торможение, при котором асинхронный двигатель отключается от сети контактором КМ1 и замыкается накоротко контактором КМ2.
Можно применить в этом случае магнитное торможение, при котором асинхронный двигатель отключается от сети контактором КМ1 и замыкается накоротко контактором КМ2.
Схема включения асинхронного двигателя при магнитном торможении.
В этом случае за счет остаточного магнитного поля по обмотке статора протекает ток короткого замыкания, который создает тормозной момент.
Особенностью торможения с самовозбуждением является то, что это очень быстрое торможение при значительных тормозных моментах.
Возможности торможения асинхронного двигателя с короткозамкнутым ротором существенно расширились за счет использования тиристорных регуляторов напряжения, которые позволяют осуществлять плавный пуск и быстрое торможение.
Для остановки двигателя используется комбинированное торможение: динамическое с магнитным. Динамическое торможение осуществляется с помощью встречно включенных тиристоров VS1-VS4, а магнитное с помощью тиристора VS5.
Схема включения асинхронного двигателя при комбинированном торможении с помощью тиристорных регуляторов напряжения.
Устройства плавного пуска и торможения состоят из двух пар тиристоров VS1-VS2, VS3-VS4, включенных встречно-параллельно. Они служат при пуске для отключения и подключения двигателя к источнику питания, за счет односторонней проводимости тиристоров в цепь статора поступает выпрямленный ток и происходит динамическое торможение. Дополнительный тиристор VS5 замыкает накоротко две фазы статора, когда интенсивность динамического торможения снижается и с его помощью создается короткое замыкание между двумя фазами.
- Торможение асинхронного двигателя: противовключением и динамическое
Торможение асинхронного двигателя — рекуперативное, демпфирующее и динамическое торможение
Торможение – это процесс снижения скорости асинхронного двигателя. При торможении двигатель работает как генератор, развивающий отрицательный крутящий момент, противодействующий движению двигателя. Торможение асинхронного двигателя в основном подразделяется на три типа. Они
- Рекуперативное торможение
- Блокировка или торможение обратным напряжением
- Динамическое торможение
- Динамическое торможение переменным током
- Самодинамическое торможение
- Динамическое торможение постоянным током
- Торможение нулевой последовательности
Торможение асинхронного двигателя подробно описано ниже.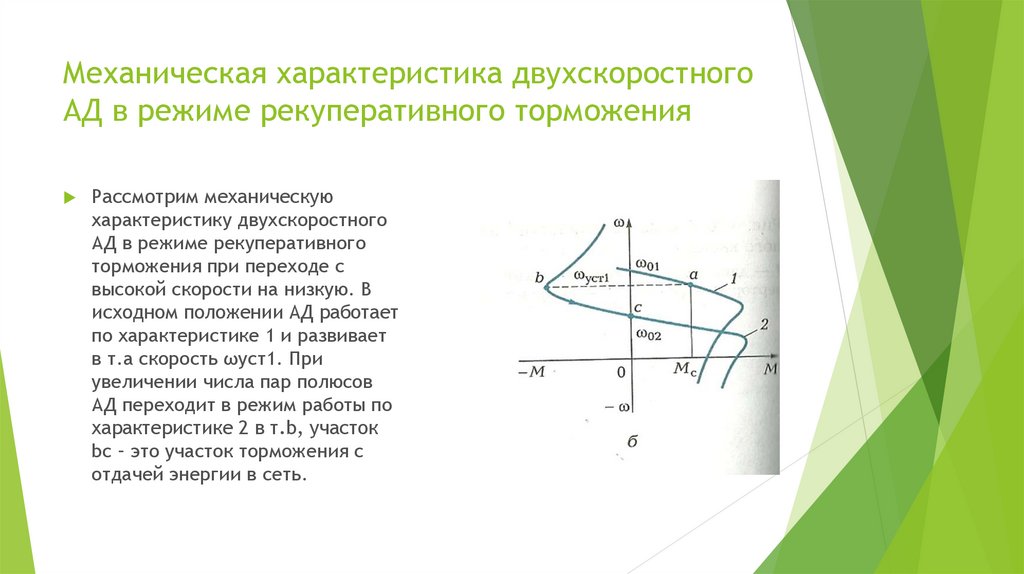
1. Рекуперативное торможение
Потребляемая мощность привода асинхронного двигателя определяется по формуле, показанной ниже
Где φ s – фазовый угол между фазным напряжением статора и фазным током статора I s . Для автомобильного режима фазовый угол всегда меньше, чем 9°.0º. Если скорость ротора становится больше синхронной скорости, то относительная скорость между проводником ротора и вращающимся полем воздушного зазора меняется на противоположную.
Этот обратный ротор индуцирует ЭДС, ток ротора и составляющую тока статора, которая уравновешивает ампер-витки ротора. Когда φ s больше, чем 90º, то поток мощности реверсируется и дает рекуперативное торможение. Ток намагничивания создавал поток в воздушном зазоре.
Характер кривой скорости и момента показан на рисунке выше. При фиксированной частоте питания рекуперативное торможение возможно только для скоростей выше синхронной. При переменной частоте скорость не может быть получена для скорости ниже синхронной скорости.
Основным преимуществом рекуперативного торможения является полное использование генерируемой мощности. И главный недостаток в том, что при питании от источника постоянной частоты двигатель не может развивать скорость ниже синхронной.
2. Заглушка
Когда последовательность фаз питания двигателя, работающего на скорости, меняется на противоположную путем перестановки соединения любых двух фаз статора на клемме питания, работа переключается с двигателя на заглушку, как показано на рисунке ниже. Подсоединение — это расширение двигательной характеристики для обратной последовательности фаз из третьего квадранта во второй. Изменение последовательности фаз меняет направление вращающегося поля на противоположное.
3. Динамическое торможение
- Динамическое торможение переменным током — Динамическое торможение достигается, когда двигатель работает от однофазного питания, отключая одну фазу от источника и либо оставляя ее разомкнутой, либо подключая ее к другой фаза.
 Два соединения соответственно известны как двух- и трехпроводное соединение.
Два соединения соответственно известны как двух- и трехпроводное соединение.
 Два соединения соответственно известны как двух- и трехпроводное соединение.
Два соединения соответственно известны как двух- и трехпроводное соединение.При подключении к однофазной сети двигатель можно рассматривать как работающий от трехфазного напряжения прямой и обратной последовательности. Общий крутящий момент, создаваемый машиной, представляет собой сумму крутящего момента, обусловленного напряжением прямой и обратной последовательности. Когда ротор имеет высокое сопротивление, то чистый крутящий момент отрицателен, и достигается операция торможения.
Предположим, что фаза A двигателя, соединенного звездой, разомкнута. Тогда ток через фазу А становится равным нулю, т. е. I a = 0, а ток через две другие фазы равен I B = – I C .
Компоненты прямой и обратной последовательности I p и I n представлены уравнением.
Где α = e j20°
- Торможение с самовозбуждением с использованием конденсатора – В этом методе три конденсатора постоянно подключены к двигателю. Емкость конденсатора подобрана таким образом, чтобы при отключении от сети двигатель работал как асинхронный генератор с самовозбуждением. Подключение торможения и процесс самовозбуждения показаны на рисунке ниже.
 Емкость конденсатора подобрана таким образом, чтобы при отключении от сети двигатель работал как асинхронный генератор с самовозбуждением. Подключение торможения и процесс самовозбуждения показаны на рисунке ниже.
Емкость конденсатора подобрана таким образом, чтобы при отключении от сети двигатель работал как асинхронный генератор с самовозбуждением. Подключение торможения и процесс самовозбуждения показаны на рисунке ниже.Кривая A представляет собой кривую намагничивания без нагрузки, а линия B представляет ток через конденсатор. E — индуцированное статором напряжение на фазу линии. Конденсатор обеспечивает необходимый реактивный ток для возбуждения.
- Динамическое торможение постоянным током — В этом методе индукционный статор подключается к источнику постоянного тока. Способ получения постоянного тока с помощью диодного моста показан на рисунке ниже.
Протекание постоянного тока через статор создает стационарное магнитное поле, а движение ротора в этом поле создает индуцируемое напряжение в стационарных обмотках. Таким образом, машина работает как генератор, а генерируемая энергия рассеивается на сопротивлении цепи ротора, создавая таким образом динамическую обмотку.
- Торможение нулевой последовательности — При этом торможении три фазы статора подключаются последовательно к одному источнику переменного или постоянного тока. Такой тип соединения известен как соединение нулевой последовательности, потому что ток во всех трех фазах является совпадающим по фазе. Характер кривой скорость-момент для питания переменного и постоянного тока показан на рисунке ниже.
При питании переменным током торможение можно использовать только до одной трети синхронной скорости. Тормозной момент, создаваемый этим соединением, значительно больше, чем у двигателя. Торможение постоянным током доступно во всем диапазоне скоростей, и торможение является важным динамическим торможением, поскольку вся генерируемая энергия тратится на сопротивление ротора.
Что такое торможение потоком и чем оно отличается от рекуперативного торможения?
Вы здесь: Домашняя страница / Часто задаваемые вопросы + основы / Что такое торможение магнитным потоком и чем оно отличается от рекуперативного торможения?
By Danielle Collins Оставить комментарий
Асинхронные двигатели переменного тока используются для привода таких нагрузок, как вентиляторы, насосы, лифты и конвейеры. Но в некоторых приложениях двигатель также используется в качестве тормоза для остановки нагрузки, изменения ее направления или удержания нагрузки и предотвращения ее перемещения. И хотя существует несколько методов торможения двигателей переменного тока, если приложение требует управляемой остановки, метод, известный как торможение магнитным потоком, часто является лучшим выбором.
В квадрантах II и IV направление вращения двигателя (n) противоположно направлению крутящего момента (T), то есть двигатель тормозит.
Изображение предоставлено: ABB
Торможение магнитным потоком
Для реализации торможения магнитным потоком привод переменного тока (преобразователь частоты или ЧРП) должен использовать прямое управление крутящим моментом (DTC), которое представляет собой схему управления, которая разъединяет ток, создающий магнитный поток.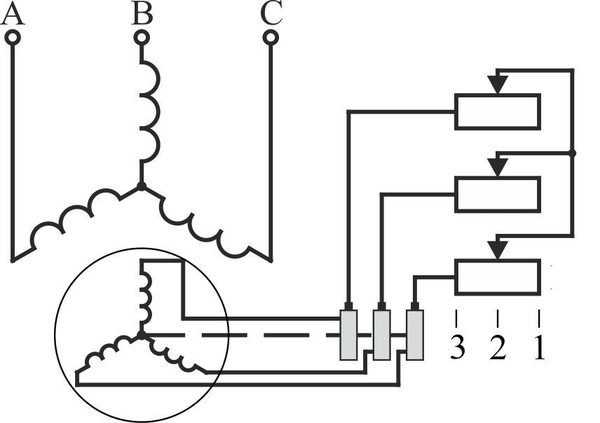 и ток, создающий крутящий момент к двигателю, и управляет ими независимо. Торможение магнитным потоком использует разделение тока, создающего поток, и тока, создающего крутящий момент, в DTC для управления торможением двигателя.
и ток, создающий крутящий момент к двигателю, и управляет ими независимо. Торможение магнитным потоком использует разделение тока, создающего поток, и тока, создающего крутящий момент, в DTC для управления торможением двигателя.
Когда двигатель работает как генератор — во время останова или выбега — торможение потоком увеличивает ток, создающий поток в двигателе. Вместо передачи дополнительной энергии на внешние резисторы, как в других методах, при торможении магнитным потоком в качестве тормозных резисторов используется двигатель. Увеличивая магнитный поток (и, следовательно, ток) в двигателе, можно быстро замедлить нагрузку, в то время как скорость двигателя и скорость остановки остаются контролируемыми.
При торможении магнитным потоком увеличивается нагрев внутри двигателя, поэтому этот метод лучше всего подходит для приложений, требующих лишь периодического торможения. Если приложение требует непрерывного торможения или требует частых капитальных ремонтов, лучшим выбором могут быть другие методы торможения, такие как рекуперативное торможение.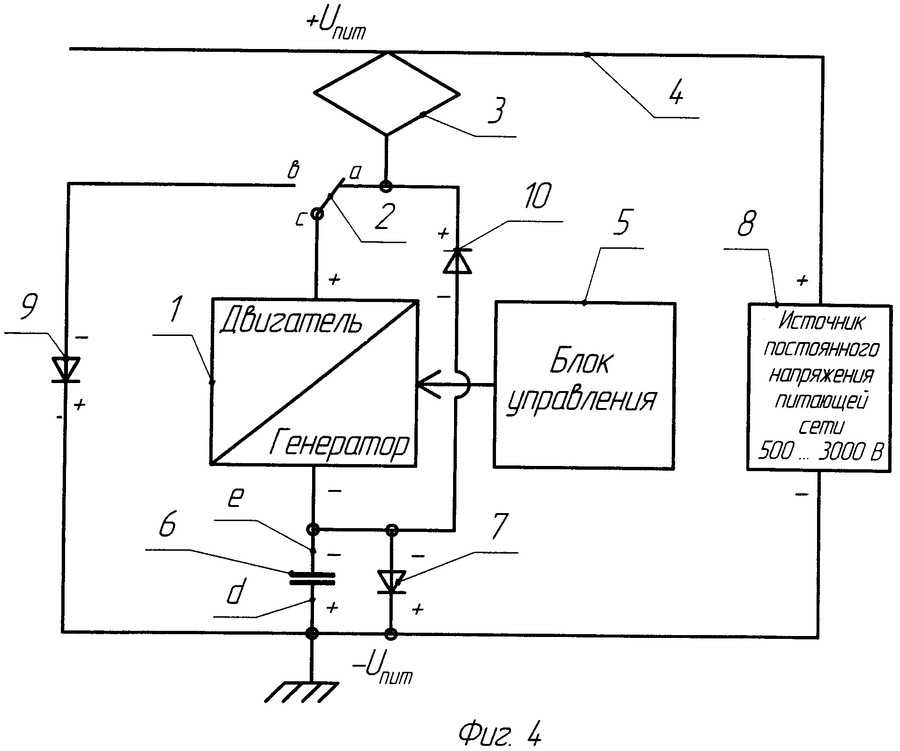
Отношение тормозного момента двигателя к номинальному моменту в зависимости от выходной частоты. Обратите внимание, что торможение магнитным потоком дает наибольшую выгоду для двигателей меньшего размера.
Изображение предоставлено: ABB
Регенеративное торможение
В отличие от торможения магнитным потоком, при рекуперативном торможении привод получает электроэнергию, вырабатываемую двигателем, и возвращает ее в источник переменного тока (или в общую шину, питающую несколько приводов). Таким образом, вместо потери энергии в виде тепла она может быть повторно использована источником питания. Рекуперативное торможение возможно благодаря IGBT, расположенному в приводе. Это позволяет приводу управлять потоком мощности в обоих направлениях — к двигателю и от него.
Поскольку рекуперативное торможение не увеличивает нагрев двигателя, оно лучше всего подходит для приложений, требующих частых остановок, постоянного замедления или капитального ремонта. Однако рекуперативное торможение обычно является более дорогостоящей альтернативой, хотя экономия на рекуперации энергии может свести на нет некоторые первоначальные затраты на оборудование.
Во время остановки двигателя или при капитальном ремонте нагрузки асинхронный двигатель переменного тока работает как генератор и вырабатывает электрическую энергию из механической энергии. При рекуперативном торможении эта электрическая энергия может быть возвращена в источник переменного тока.
Изображение предоставлено: Bonitron
Торможение постоянным током
Другим типом торможения, который часто сравнивают с торможением магнитным потоком, является торможение постоянным током. Этот метод торможения подает постоянное напряжение (от шины постоянного тока) в обмотки двигателя. Это приводит к тому, что магнитное поле в двигателе становится фиксированным, а не вращающимся. Торможение происходит, когда ротор работает, чтобы выровняться с этим стационарным полем. Как и при торможении магнитным потоком, энергия, генерируемая во время остановки, рассеивается двигателем в виде тепла. Торможение постоянным током является стандартной функцией большинства современных частотно-регулируемых приводов, но из-за отсутствия контроля потока двигателя оно может обеспечить только неуправляемое торможение.