Содержание
Регулятор оборотов с обратной связью по скорости , токовой отсечкой и плавным запуском для универсального коллекторного двигателя.
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
U1=4,44w1k1fΦ
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
U1/f1=U’1/f’1
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
Недостатки:
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.

Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
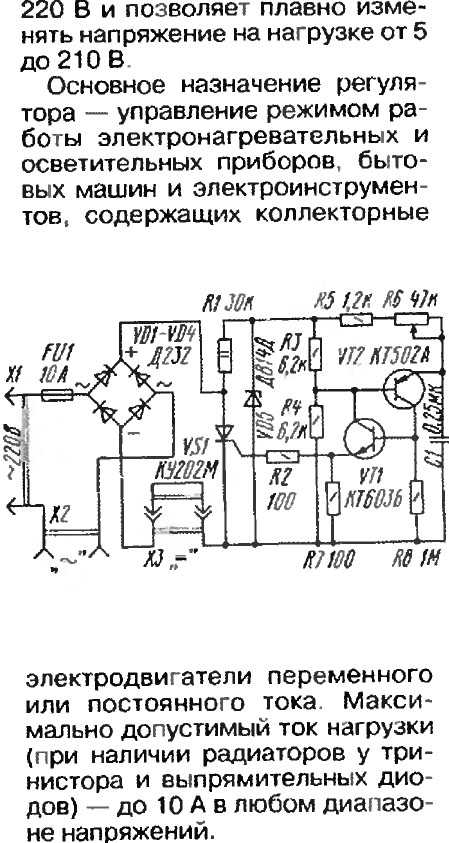
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
 Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
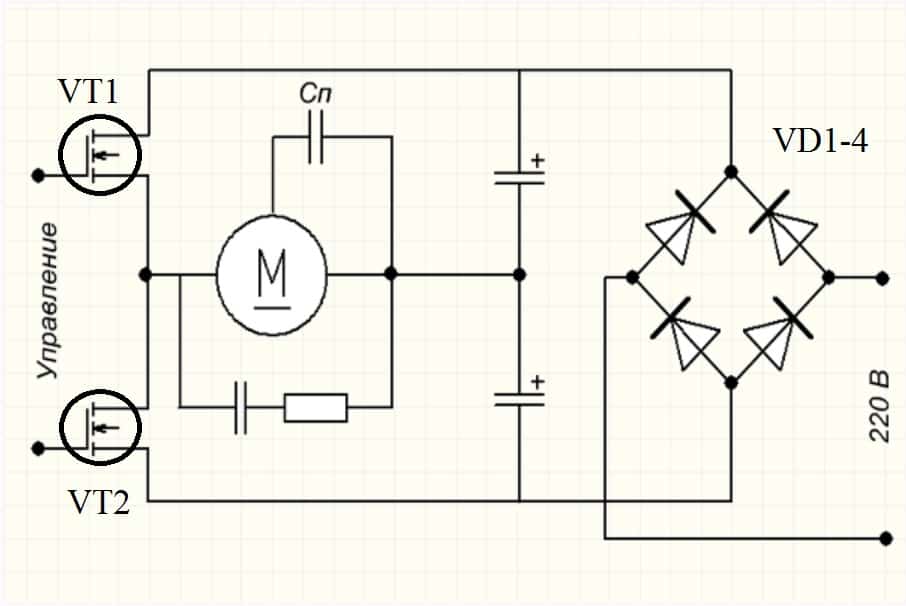
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая.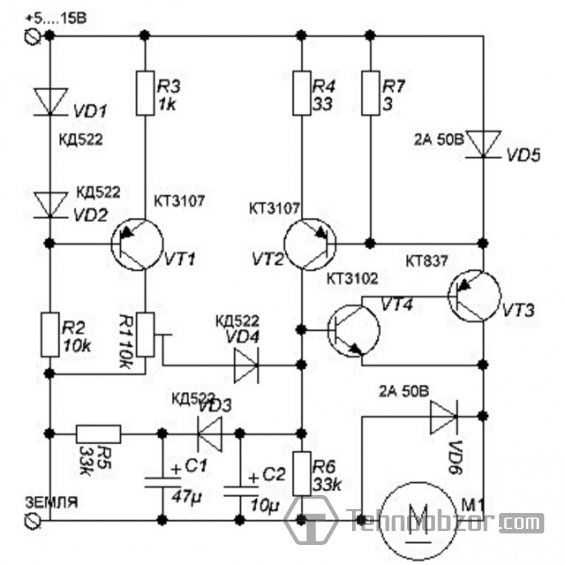 В основном такая электрическая схема используется для мощного электрического двигателя.
В основном такая электрическая схема используется для мощного электрического двигателя.
Читать также: Какой домкрат лучше подкатной или бутылочный
Видео: регулятор оборотов электродвигателя с ШИро V2
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
Достоинства:
- большой диапазон регулирования в сторону понижения скорости вращения.
Недостатки:
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Как сделать самодельный регулятор оборотов двигателя
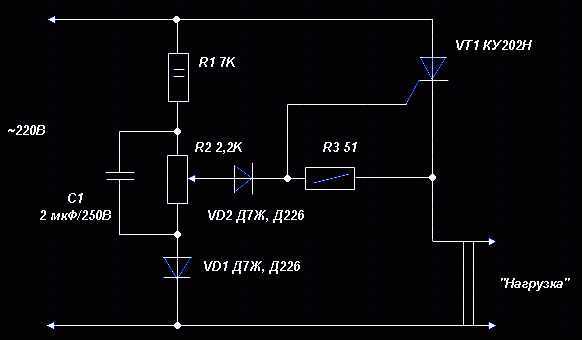
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
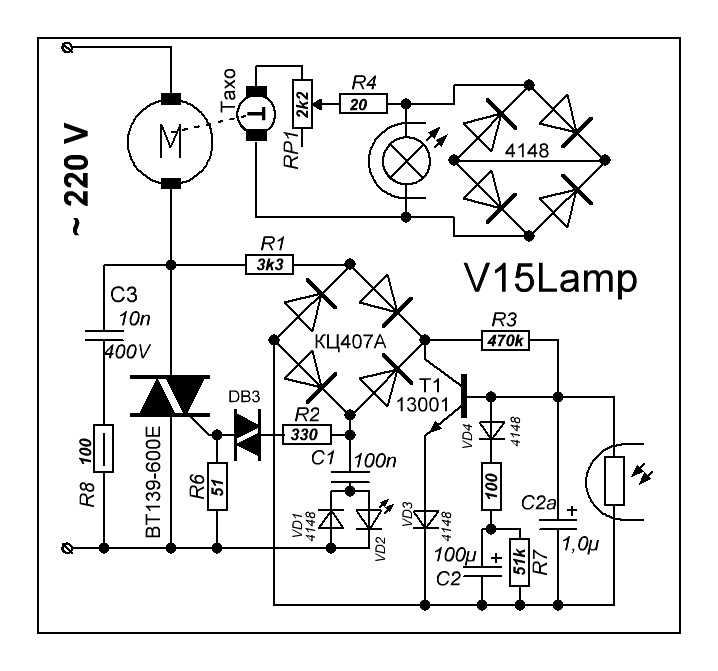
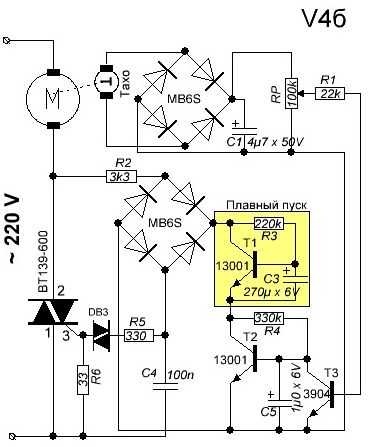
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Практически во всех бытовых приборах и электроинструментах используется коллекторныйдвигатель. В более новых моделях болгарок, шуруповертов, ручных фрезеров, пылесосов, миксеров и других присутствует регулировка оборотов двигателя, но в более поздних моделях такой функции нет. Такими инструментами и бытовыми приборами не всегда удобно работать, и поэтому существуют регуляторы оборотов с поддержанием мощности.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.

В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Устройство коллекторного двигателя
Коллекторный электродвигатель состоит из статора и ротора. Ротором называется часть, которая
вращается, а статор является неподвижным. Еще одной составляющей электродвигателя являются графитовые щетки, по которым ток течет к якорю. В зависимости от комплектации могут присутствовать датчики Холла, которые дают возможность плавного запуска и регулировки оборотов. Чем выше подаваемое напряжение, тем выше обороты. Этот тип может работать как от переменного, так и от постоянного тока.
По классификации коллекторные двигатели можно разделить на те, что работают от переменного и от постоянного тока. Их также можно разделить по типу возбуждения обмотки: двигатели с параллельным, последовательным и смешанным (параллельно-последовательным) возбуждением.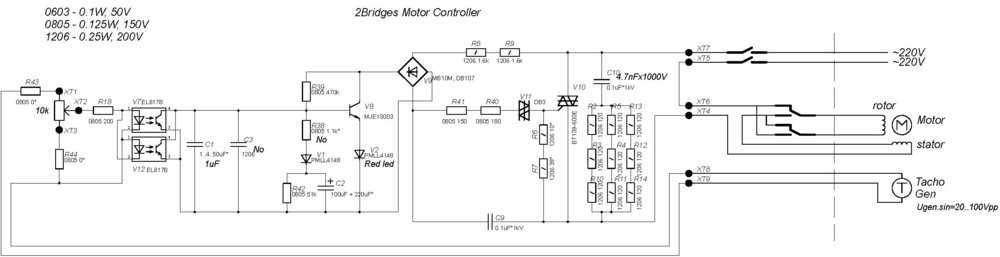
Производители контроллеров
Лидером в производстве профессиональных контроллеров для спортсменов является, конечно же Schulze Electronik – на этих контроллерах летает, плавает и ездит большинство спортсменов. Однако это и самые дорогие контроллеры.
Далее в списке популярности стоит Castle Creations – сравнительно молодая фирма (основана в 1997г), специализирующаяся исключительно на выпуске регуляторов хода. В Америке она является лидером по количеству продаж.
Также профессиональные, но опять-таки довольно дорогие контроллеры для спортсменов делает немецкая фирма Kontronik.
Продукция чешских фирм MGM Compro (это их контроллеры называются TMM) и Jeti Models (они же делают контроллеры для фирмы Hacker motors) ориентирована в основном на рынок хобби.
Американская фирма Astro Flight, специализирующаяся на выпуске электромоторов для моделизма, также делает контроллеры к своим моторам, однако отдельно от моторов найти их в продаже проблемматично…
При выборе контроллера главный совет — внимательно изучите все характеристики приглянувшейся вам модели.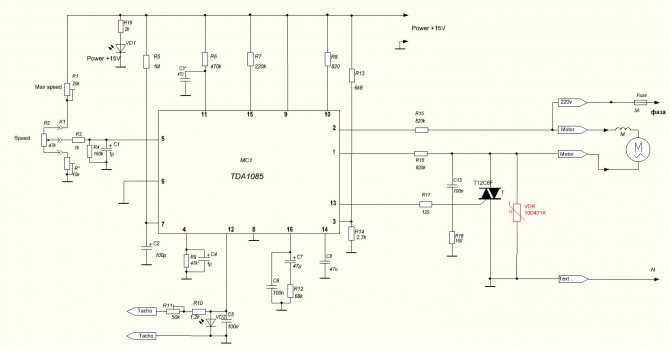 У некоторых фирм, например Jeti models и MGM Compro (TMM), контроллеры на один и тот же ток и напряжение могут быть с разными версиями программного обеспечения и иметь разное число настроек. Если вы планируете использовать литий-полимерные аккумуляторы — контроллер должен иметь соответствующие настройки. При больших токах 60-80А контроллер лучше выбирать с запасом на 10-15А больше.
У некоторых фирм, например Jeti models и MGM Compro (TMM), контроллеры на один и тот же ток и напряжение могут быть с разными версиями программного обеспечения и иметь разное число настроек. Если вы планируете использовать литий-полимерные аккумуляторы — контроллер должен иметь соответствующие настройки. При больших токах 60-80А контроллер лучше выбирать с запасом на 10-15А больше.
ШИМ регулятор оборотов двигателя 10-60В, 20А
ШИМ регулятор оборотов коллекторного двигателя постоянного тока DC 10-60В 40А с выносным регулятором.
ШИМ регулятор мощности имеет самое широкую область применения. Это регулятор хода коллекторных двигателей, диммер для светодиодов и светодиодных лент, реобас для майнинг фермы.
Регулятор напряжения постоянного тока изменяет значение выходного напряжения в диапазоне от 10 вольт до 60 Вольт с максимальной нагрузкой до 20 Ампер и мощностью до 1200 Ватт.
Профессиональная версия ШИМ-контроллера, адаптированная для непрерывной работы.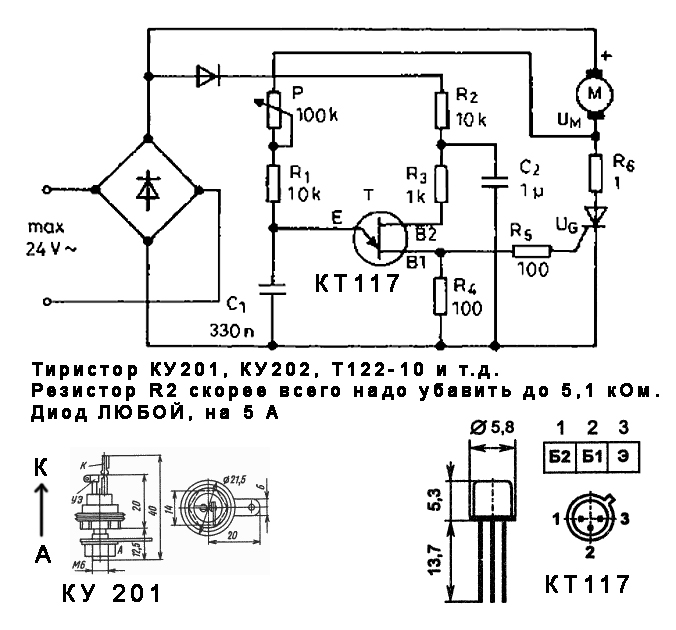
Применение:
- плавное регулирование частоты вращения коллекторных электродвигателей (вентиляторы, вакуумные масляные насосы, лопасти, двигатели стеклоочистителей и т. д.)
- реобас для майнинг фермы
- регулировка яркости свечения галогеновых ламп 12В/24В, или ламп накаливания 12В/24В/36В/48В
- регулировка силы света (диммер) (светодиоды и светодиодные ленты без мерцания)
- регулирование мощности нагревателей, резистивных проволочных нагревателей и других резистивных элементов
ШИМ регулятор оборотов используется для регулирования оборотов мощных вентиляторов, это реобас для майнинг фермы. Вентиляторы подключаются параллельно и для соединения вентиляторов используются только черный и красный провода.
Управление скоростью двигателя осуществляется с помощью выносного регулировочного резистора на 10 кОм с ручкой.
- Используется для точной регулировки скорости.
- Высокая эффективность, высокий крутящий момент, низкий нагрев.
- С защитой от обратной полярности, с высокой защитой по току.
- Предназначен для управления нагрузкой до 20 А. Рекомендуемая длительная нагрузка 10 A, 450 Вт.
- Внимание! При использование модуля для регулировки на нагрузках близких к 20 А необходимо дополнительное охлаждение.
- Потенциометр управления скважностью импульсов позволяет производить регулировку мощности от нуля до максимального значения
Характеристики
Напряжение питания: 10 – 60 В постоянного тока
Максимальный ток: 20 А
Непрерывный ток: 18 А
Максимальная мощность: 1200 Вт
Диапазон управления скоростью двигателя: от 0 до 100%
Частота ШИМ: 25 кГц
Размеры: 77 х 45 х 28 мм
Схема подключения:
На плате регулятора имеется 4 винтовых клеммы для подключения двигателя и питания. На задней стороне платы есть обозначения клемм.
Клеммы Power + и Power- подключаем к источнику питания соответственно + и — (например, к аккумулятору)
Клеммы Motor+ и Motor- подключаем к электродвигателю постоянного тока в соответствующей полярности (при смене полярности, двигатель будет вращаться в другую сторону).
Как управляются двигатели постоянного тока? — Регулирование скорости двигателей постоянного тока
Двигатели постоянного тока питаются от постоянного тока. Они имеют широкий спектр применения в таких продуктах, как бытовая техника, транспортные средства и заводы. Можно сказать, что они играют жизненно важную роль в нашей жизни.
Однако многие пользователи выражают неуверенность в том, как управлять скоростью двигателей постоянного тока. На этой странице представлено простое введение в то, как это делается.
Что такое двигатель постоянного тока?
Начнем с того, что электродвигатель — это машина, которая использует электричество для вращения вала, тем самым преобразуя электрическую энергию в механическую. Электродвигатели в целом делятся на следующие три типа.
Электродвигатели в целом делятся на следующие три типа.
- Двигатели постоянного тока
- Двигатели переменного тока
- Шаговые двигатели
Двигатели переменного тока приводятся в действие переменным током, а шаговые двигатели приводятся в действие импульсами электроэнергии. С другой стороны, двигатели постоянного тока питаются от постоянного тока и имеют следующие особенности.
- Высокий пусковой момент и возможность вращения на высоких скоростях
- Мощность двигателя пропорциональна приложенному напряжению
Двигатели постоянного тока подразделяются на щеточные двигатели постоянного тока и бесщеточные двигатели постоянного тока. Коллекторные двигатели постоянного тока имеют катушки в своем роторе и изменяют способ прохождения тока через катушки на основе механизма, использующего коммутаторы и щетки. Коллекторные двигатели постоянного тока создают электрические и акустические шумы и требуют частого обслуживания, поскольку их щетки и коллектор являются расходными частями.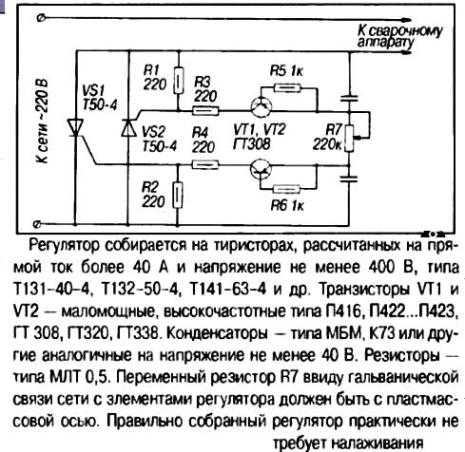 Но они также имеют простую конструкцию и могут работать без электронной схемы привода, если не требуется регулирование скорости.
Но они также имеют простую конструкцию и могут работать без электронной схемы привода, если не требуется регулирование скорости.
Бесщеточный двигатель постоянного тока, напротив, не требует коммутатора и щеток, поскольку в роторе имеется постоянный магнит. Это, однако, означает, что им требуется схема привода. Они также отличаются низким уровнем обслуживания, бесшумной работой и длительным сроком службы.
Характеристики двигателей постоянного тока
В отличие от двигателей переменного тока, двигатели постоянного тока очень просты в использовании благодаря простоте изменения их скорости. Итак, как это достигается на практике? Следующее объяснение начинается с рассмотрения характеристик двигателя постоянного тока.
Характеристики двигателя постоянного тока представлены кривой крутящий момент-скорость, которая наклонена вниз вправо, с крутящим моментом в качестве горизонтальной оси и скоростью в качестве вертикальной оси. Скорость самая высокая, когда нет нагрузки, спадает вправо, пока не будет достигнут максимальный крутящий момент при нулевой скорости.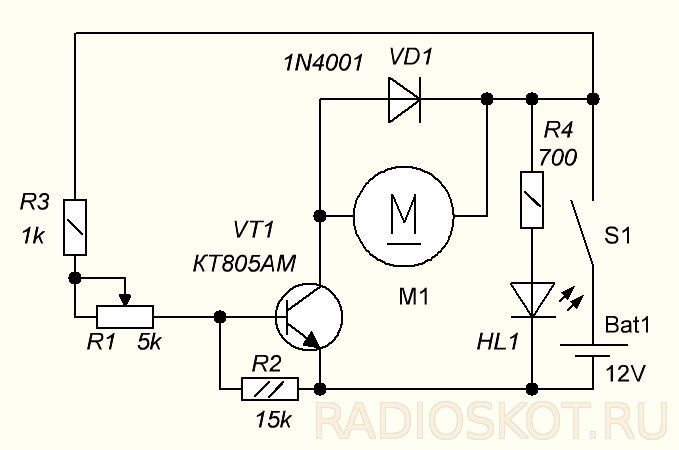
Крутящий момент и скорость изменяются в зависимости от нагрузки, как показано на этой кривой зависимости крутящего момента от скорости. Глядя на график ниже, давайте рассмотрим двигатель, вращающийся со скоростью ω0 с крутящим моментом T0. Если крутящий момент нагрузки затем увеличится до T1, скорость двигателя будет следовать за крутящим моментом до новой скорости ω1. Аналогичным образом, если момент нагрузки далее увеличивается до T2, скорость падает до ω2.
Крутящий момент и скорость двигателя постоянного тока
Взгляд на взаимосвязь между крутящим моментом и током показывает, что они пропорциональны друг другу. Соотношение между ними является постоянным для двигателя, при этом соотношение остается неизменным независимо от изменений скорости двигателя или напряжения привода. Это означает, что измерения тока двигателя достаточно для определения крутящего момента двигателя.
Момент-скорость двигателя постоянного тока и кривая момента-тока
Что происходит при изменении напряжения привода?
Итак, что происходит с кривой крутящий момент-скорость, когда изменяется напряжение, используемое для привода двигателя постоянного тока? На приведенном ниже графике показаны кривые крутящий момент-скорость для различных напряжений. Удвоение напряжения привода удваивает как скорость двигателя без нагрузки, так и пусковой момент (крутящий момент, когда двигатель зафиксирован). Другими словами, увеличение напряжения сдвигает кривую крутящий момент-скорость вверх, параллельно. Кривая крутящий момент-скорость для двигателя постоянного тока может быть скорректирована по желанию путем изменения напряжения, подаваемого на двигатель.
Удвоение напряжения привода удваивает как скорость двигателя без нагрузки, так и пусковой момент (крутящий момент, когда двигатель зафиксирован). Другими словами, увеличение напряжения сдвигает кривую крутящий момент-скорость вверх, параллельно. Кривая крутящий момент-скорость для двигателя постоянного тока может быть скорректирована по желанию путем изменения напряжения, подаваемого на двигатель.
Напряжение привода двигателя и кривая крутящего момента
Как заставить двигатель постоянного тока вращаться с необходимой скоростью
Теперь, учитывая эти характеристики, как вы можете вращать двигатель с требуемой скоростью при любом заданном моменте нагрузки?
Кривая момент-скорость двигателя постоянного тока преобразуется в зависимости от изменения напряжения привода. Это означает, что указанная выше цель может быть достигнута простой регулировкой напряжения возбуждения. Если посмотреть на график ниже, если требуется вращение со скоростью ω1, когда момент нагрузки равен, например, T0, напряжение привода V4 слишком низкое, что приводит к скорости ω2. Напряжение возбуждения V0 слишком велико, что приводит к скорости ω0. Однако управление двигателем при промежуточном напряжении V3 как раз подходит для достижения желаемой скорости ω1.
Напряжение возбуждения V0 слишком велико, что приводит к скорости ω0. Однако управление двигателем при промежуточном напряжении V3 как раз подходит для достижения желаемой скорости ω1.
Напряжение и скорость привода двигателя
Регулируя таким образом напряжение привода, можно заставить двигатель постоянного тока вращаться с желаемой скоростью независимо от крутящего момента нагрузки.
Методы управления напряжением привода
Два способа регулировки напряжения привода: линейное управление и ШИМ-управление.
Линейное управление работает путем включения переменного резистора последовательно с двигателем и регулировки сопротивления для изменения напряжения на двигателе. Хотя транзистор или другое полупроводниковое устройство можно использовать в качестве последовательно соединенного переменного резистора, этот подход имеет низкую эффективность из-за большого количества тепла, выделяемого сопротивлением (полупроводником), и поэтому в наши дни он используется редко.
Альтернативным методом является ШИМ-управление. Напряжение, подаваемое на двигатель, можно изменять, включая и выключая полупроводниковый переключатель (например, транзистор или полевой транзистор) на высокой скорости, при этом напряжение определяется шириной импульса включения и выключения. Высокая эффективность этого метода делает его наиболее распространенным в настоящее время.
Линейное управление
ШИМ-управление
Регулятор скорости двигателя
Использование этих методов позволяет гибко регулировать скорость двигателя постоянного тока. Однако для поддержания постоянной скорости вращения двигателя требуется дополнительное управление. Это связано с тем, что крутящий момент двигателя зависит от самой нагрузки, а также от других факторов, таких как температура, влажность и изменения во времени. Простое вождение двигателя с постоянным напряжением приведет к тому, что его скорость будет колебаться при изменении нагрузки.
Поддержание постоянной скорости, несмотря на переменную нагрузку, требует постоянной регулировки напряжения привода в ответ на эти изменения нагрузки. На приведенном ниже графике показан пример, когда момент нагрузки для двигателя, работающего со скоростью ω0, уменьшается с T1 до T0, и в этом случае снижение напряжения привода до V0 поддерживает скорость двигателя на уровне ω0. Если вместо этого крутящий момент увеличивается до T2, для поддержания постоянной скорости двигателя ω0 требуется, чтобы напряжение привода увеличилось до V2.
На приведенном ниже графике показан пример, когда момент нагрузки для двигателя, работающего со скоростью ω0, уменьшается с T1 до T0, и в этом случае снижение напряжения привода до V0 поддерживает скорость двигателя на уровне ω0. Если вместо этого крутящий момент увеличивается до T2, для поддержания постоянной скорости двигателя ω0 требуется, чтобы напряжение привода увеличилось до V2.
Контроль скорости
Скорость измеряется датчиком, прикрепленным к двигателю. Вычисляется разница между измеренной и требуемой скоростью двигателя (ошибка скорости), а напряжение привода регулируется таким образом, чтобы оно увеличивалось, если скорость была слишком низкой, и уменьшалась, если скорость была слишком высокой. При этом поддерживается постоянная скорость двигателя. В то время как в прошлом для управления напряжением возбуждения использовались операционные усилители или другие аналоговые схемы, в последние годы использование микрокомпьютеров стало нормой.
Схема управления скоростью двигателя постоянного тока
Схема управления скоростью бесщеточного двигателя постоянного тока
Датчик скорости
Выводит сигнал, указывающий скорость двигателя.
К устройствам, используемым для этой цели, относятся датчики Холла, энкодеры и тахогенераторы.Цепь определения скорости
Расчет скорости двигателя по сигналу датчика скорости.
Задание скорости
Выводит целевую скорость двигателя.
Компаратор
Вычисляет разницу между заданием скорости и измеренной скоростью.
Схема расчета напряжения привода
Вычисляет напряжение привода двигателя на основе расчетной ошибки скорости.
Цепь привода
Цепь, которая регулирует напряжение, подаваемое на двигатель, в соответствии с сигналом напряжения привода.
 К устройствам, используемым для этой цели, относятся датчики Холла, энкодеры и тахогенераторы.
К устройствам, используемым для этой цели, относятся датчики Холла, энкодеры и тахогенераторы. Двигатель постоянного тока может работать в устойчивом режиме, контролируя его скорость так, чтобы она оставалась постоянной независимо от изменений нагрузки.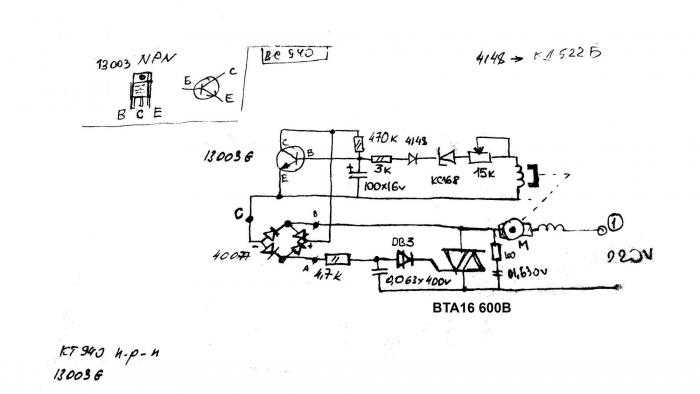 Эти двигатели также подходят для широкого спектра методов управления, которые могут быть реализованы с помощью микрокомпьютера. Двигатели постоянного тока находят применение во многих различных приложениях, в которых используется простота управления.
Эти двигатели также подходят для широкого спектра методов управления, которые могут быть реализованы с помощью микрокомпьютера. Двигатели постоянного тока находят применение во многих различных приложениях, в которых используется простота управления.
Двигатели постоянного тока: простые в использовании двигатели с простой регулировкой скорости
Двигатели постоянного тока питаются от постоянного тока, и, в отличие от двигателей переменного тока, их скорость легко регулируется. Характеристики двигателя постоянного тока представлены его кривой крутящий момент-скорость, в которой скорость и крутящий момент нагрузки обратно пропорциональны. Эта кривая крутящий момент-скорость преобразуется в зависимости от изменения напряжения привода. Соответственно, регулируя напряжение, подаваемое на двигатель постоянного тока, его можно заставить работать на любой скорости независимо от крутящего момента нагрузки.
Для изменения напряжения привода двигателя можно использовать линейное или ШИМ-управление. ШИМ-управление стало преобладать в последние годы из-за его превосходной эффективности. ШИМ-управление изменяет напряжение, включая и выключая полупроводниковый переключатель с высокой скоростью таким образом, что изменение ширины импульса включения и выключения изменяет напряжение.
ШИМ-управление стало преобладать в последние годы из-за его превосходной эффективности. ШИМ-управление изменяет напряжение, включая и выключая полупроводниковый переключатель с высокой скоростью таким образом, что изменение ширины импульса включения и выключения изменяет напряжение.
Решение проблем с бесщеточными двигателями постоянного тока
ASPINA поставляет не только автономные бесщеточные двигатели постоянного тока, но и системные продукты, включающие системы привода и управления, а также механические конструкции. Они подкреплены всесторонней поддержкой, которая простирается от прототипирования до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым в различных отраслях промышленности, областях применения и потребительских продуктах, а также для ваших конкретных производственных схем.
ASPINA поддерживает не только клиентов, которые уже знают свои требования или спецификации, но и тех, кто сталкивается с проблемами на ранних стадиях разработки. Вы боретесь со следующими проблемами?
Вы боретесь со следующими проблемами?
- Выбор двигателя
- У вас еще нет подробных спецификаций или проектных чертежей, но вам нужен совет по двигателям?
- У вас нет штатного специалиста по двигателям, и вы не можете определить, какой тип двигателя лучше всего подойдет для вашего нового продукта?
- Разработка двигателя и связанных с ним компонентов
- Хотите сосредоточить свои ресурсы на основных технологиях и заказать приводные системы и разработку двигателей?
- Хотите сэкономить время и силы на перепроектирование существующих механических компонентов при замене двигателя?
- Уникальное требование
- Вам нужен нестандартный двигатель для вашего продукта, но ваш обычный поставщик отказался?
- Не можете найти двигатель, который дает вам требуемый контроль, и почти теряете надежду?
Ищете ответы на эти вопросы? Свяжитесь с ASPINA, мы здесь, чтобы помочь.
Ссылки на глоссарий и страницы часто задаваемых вопросов
Питание и управление бесщеточными двигателями постоянного тока
Растущая популярность бесщеточных двигателей постоянного тока (BLDC) обусловлена использованием электронной коммутации. Это заменяет обычную механику, состоящую в том, что щетки трутся о коллектор для подачи питания на обмотки якоря двигателя постоянного тока.
Электронная коммутация обеспечивает более высокий КПД по сравнению с обычными двигателями постоянного тока с улучшением от 20 до 30% для двигателей, работающих с той же скоростью и нагрузкой. Поскольку Международное энергетическое агентство сообщает, что 40% всей электроэнергии в мире используется для питания электродвигателей, такое повышение эффективности становится убедительным.
Кроме того, двигатель BLDC более надежен. Он сохраняет свою высокую производительность, в то время как эффективность и мощность эквивалентного обычного двигателя снижаются из-за износа, вызывая плохой контакт щеток, искрение между щетками и коммутатором, рассеивая энергию, и грязь, ухудшающую электропроводность.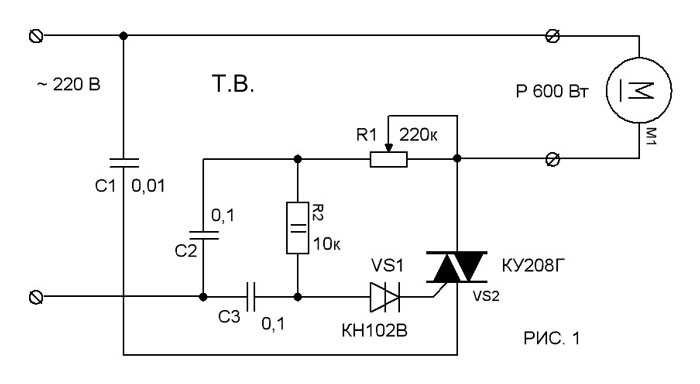
Повышение эффективности позволяет сделать двигатели BLDC меньше, легче и тише при заданной выходной мощности, что еще больше увеличивает их популярность в таких секторах, как автомобилестроение; бытовая техника; и отопление, вентиляция и кондиционирование воздуха (HVAC). Другие преимущества двигателей BLDC включают превосходные характеристики скорости по отношению к крутящему моменту (за исключением крутящего момента при запуске), более динамичный отклик, бесшумную работу и более высокие диапазоны скоростей.
Недостатком двигателей BLDC является их сложность и связанное с этим увеличение стоимости. Электронная коммутация требует контролирующих цепей, чтобы гарантировать точное время включения катушки для точного управления скоростью и крутящим моментом, а также для обеспечения работы двигателя с максимальной эффективностью.
К счастью, этот сектор быстро развивается, и поставщики полупроводников теперь предлагают широкий спектр высокоинтегрированных микросхем MOSFET с драйверами двигателей постоянного тока с внешними или встроенными микроконтроллерами, что упрощает процесс проектирования и снижает стоимость компонентов. В этой статье объясняется, как разработчик может воспользоваться преимуществами этих новейших микросхем для упрощения процесса проектирования. энергия. Ток через обмотку создает магнитное поле, которое в присутствии второго магнитного поля (обычно инициируемого постоянными магнитами) создает силу на этой обмотке, которая достигает максимума, когда ее проводники находятся под углом 90° ко второму полю. Увеличение количества катушек повышает мощность двигателя и выравнивает подачу мощности. (Monolithic Power Systems (MPS) выпустила рекомендации по применению (см. Ссылку 1), в которых хорошо изложены основные концепции двигателя.)
В этой статье объясняется, как разработчик может воспользоваться преимуществами этих новейших микросхем для упрощения процесса проектирования. энергия. Ток через обмотку создает магнитное поле, которое в присутствии второго магнитного поля (обычно инициируемого постоянными магнитами) создает силу на этой обмотке, которая достигает максимума, когда ее проводники находятся под углом 90° ко второму полю. Увеличение количества катушек повышает мощность двигателя и выравнивает подачу мощности. (Monolithic Power Systems (MPS) выпустила рекомендации по применению (см. Ссылку 1), в которых хорошо изложены основные концепции двигателя.)
Двигатель BLDC устраняет необходимость в механическом коммутаторе за счет изменения схемы двигателя; обмотки становятся статором, а постоянные магниты становятся частью ротора. Статор обычно состоит из стальных пластин с осевыми прорезями для размещения четного числа обмоток вдоль его внутренней периферии. Ротор состоит из вала и ступицы с постоянными магнитами, образующими от двух до восьми пар полюсов, которые чередуются между «N» и «S». На рис. 1 показан один из примеров обычного расположения магнитов, в данном случае две пары магнитов, прикрепленные непосредственно к втулке ротора.
На рис. 1 показан один из примеров обычного расположения магнитов, в данном случае две пары магнитов, прикрепленные непосредственно к втулке ротора.
Рисунок 1: В двигателе BLDC постоянные магниты прикреплены к ротору. Типичные конфигурации включают от двух до восьми пар, чередующихся между полюсами «N» и «S». (любезно предоставлено: MPS)
Поскольку обмотки являются стационарными, для их подачи можно установить постоянные соединения. Чтобы неподвижные обмотки двигали постоянный магнит, обмотки должны быть запитаны (или коммутированы) в контролируемой последовательности для создания вращающегося магнитного поля.
Поскольку вращающееся магнитное поле, создаваемое статором, заставляет ротор вращаться с той же частотой, двигатель BLDC известен как «синхронный» тип. Двигатели BLDC могут быть одно-, двух- или трехфазными. Трехфазные двигатели BLDC являются наиболее распространенными и будут предметом остальной части этой статьи.
Управление двигателем BLDC
На сегодняшний день наиболее распространенной конфигурацией для последовательной подачи тока на трехфазный двигатель BLDC является использование трех пар силовых МОП-транзисторов, расположенных в мостовой структуре, как показано на рис. 2. Каждая пара управляет коммутация одной фазы двигателя. В типичной схеме полевые МОП-транзисторы верхнего плеча управляются с помощью широтно-импульсной модуляции (ШИМ), которая преобразует входное постоянное напряжение в модулированное управляющее напряжение. Использование ШИМ позволяет ограничить пусковой ток и обеспечивает точный контроль скорости и крутящего момента. Частота ШИМ представляет собой компромисс между потерями при переключении, возникающими на высоких частотах, и пульсирующими токами, возникающими на низких частотах, которые в экстремальных случаях могут повредить двигатель. Обычно конструкторы используют частоту ШИМ, по крайней мере, на порядок превышающую максимальную скорость вращения двигателя.
2. Каждая пара управляет коммутация одной фазы двигателя. В типичной схеме полевые МОП-транзисторы верхнего плеча управляются с помощью широтно-импульсной модуляции (ШИМ), которая преобразует входное постоянное напряжение в модулированное управляющее напряжение. Использование ШИМ позволяет ограничить пусковой ток и обеспечивает точный контроль скорости и крутящего момента. Частота ШИМ представляет собой компромисс между потерями при переключении, возникающими на высоких частотах, и пульсирующими токами, возникающими на низких частотах, которые в экстремальных случаях могут повредить двигатель. Обычно конструкторы используют частоту ШИМ, по крайней мере, на порядок превышающую максимальную скорость вращения двигателя.
Рис. 2. Трехфазный бесконтактный двигатель постоянного тока обычно питается от трех пар полевых МОП-транзисторов, расположенных в мостовой конструкции и управляемых ШИМ. ШИМ обеспечивает точное управление скоростью и крутящим моментом двигателя. (Схема нарисована с помощью Digi-Key Scheme-it®)
Существует три схемы управления для электронной коммутации: трапециевидная, синусоидальная и полевой.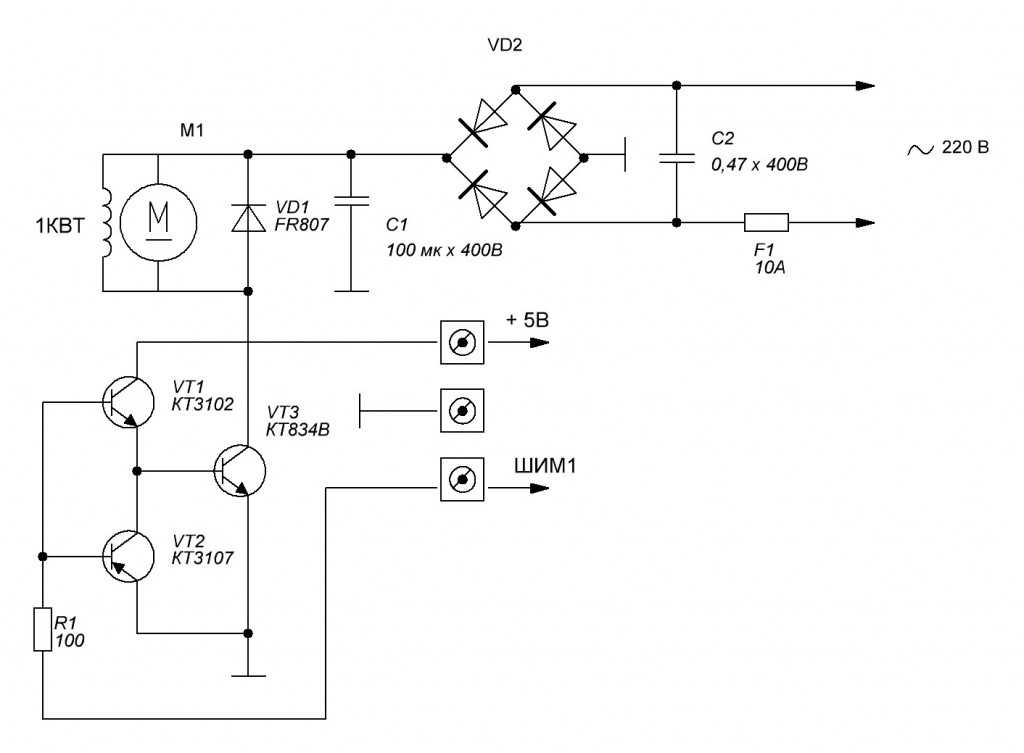 Трапециевидная техника (описанная в примере ниже) — самая простая. На каждом шаге две обмотки находятся под напряжением (одна «высокая» и одна «низкая»), а другая обмотка плавает. Недостатком трапециевидного метода является то, что эта «ступенчатая» коммутация вызывает «пульсацию» крутящего момента, особенно на низких скоростях.
Трапециевидная техника (описанная в примере ниже) — самая простая. На каждом шаге две обмотки находятся под напряжением (одна «высокая» и одна «низкая»), а другая обмотка плавает. Недостатком трапециевидного метода является то, что эта «ступенчатая» коммутация вызывает «пульсацию» крутящего момента, особенно на низких скоростях.
Синусоидальное управление более сложное, но снижает пульсации крутящего момента. В этом режиме управления все три катушки остаются под напряжением, при этом управляющий ток в каждой из них изменяется синусоидально на 120° друг от друга. Результатом является гораздо более плавная подача мощности по сравнению с трапециевидной техникой.
Управление, ориентированное на поле, основано на измерении и регулировке токов статора таким образом, чтобы угол между потоками ротора и статора всегда составлял 90°. Этот метод более эффективен на высоких скоростях, чем синусоидальный метод, и дает лучшие характеристики при динамических изменениях нагрузки по сравнению со всеми другими методами.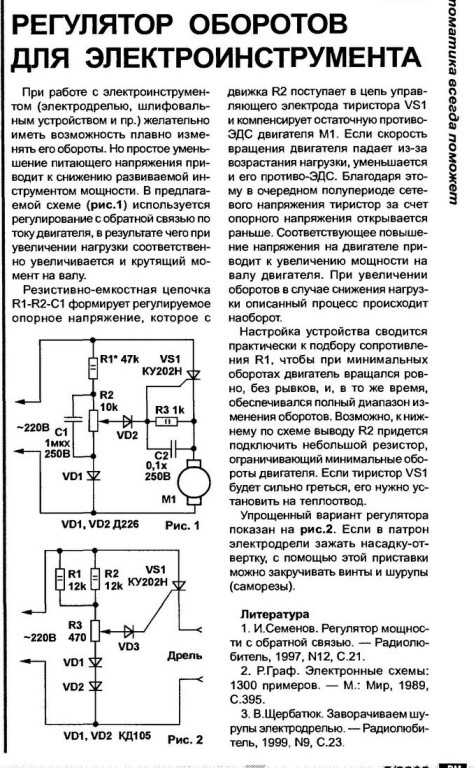 Пульсации крутящего момента практически отсутствуют, а более плавное и точное управление двигателем может быть достигнуто как на низких, так и на высоких скоростях.
Пульсации крутящего момента практически отсутствуют, а более плавное и точное управление двигателем может быть достигнуто как на низких, так и на высоких скоростях.
В этой статье остальная часть технического обсуждения будет ограничена трапециевидной техникой.
В двигателе, использующем трапециевидную схему управления, переключение моста MOSFET должно происходить в точно определенной последовательности, чтобы двигатель BLDC работал эффективно. Последовательность переключения определяется взаимным расположением пар магнитов ротора и обмоток статора. Трехфазному двигателю BLDC требуется шестиступенчатая последовательность коммутации для завершения одного электрического цикла. Количество механических оборотов за электрический цикл определяется количеством пар магнитов на роторе. Например, два электрических цикла потребуются для механического вращения ротора, состоящего из двух пар магнитов, на один оборот.
С датчиком и без датчика
Две технологии предлагают решение для обратной связи по положению.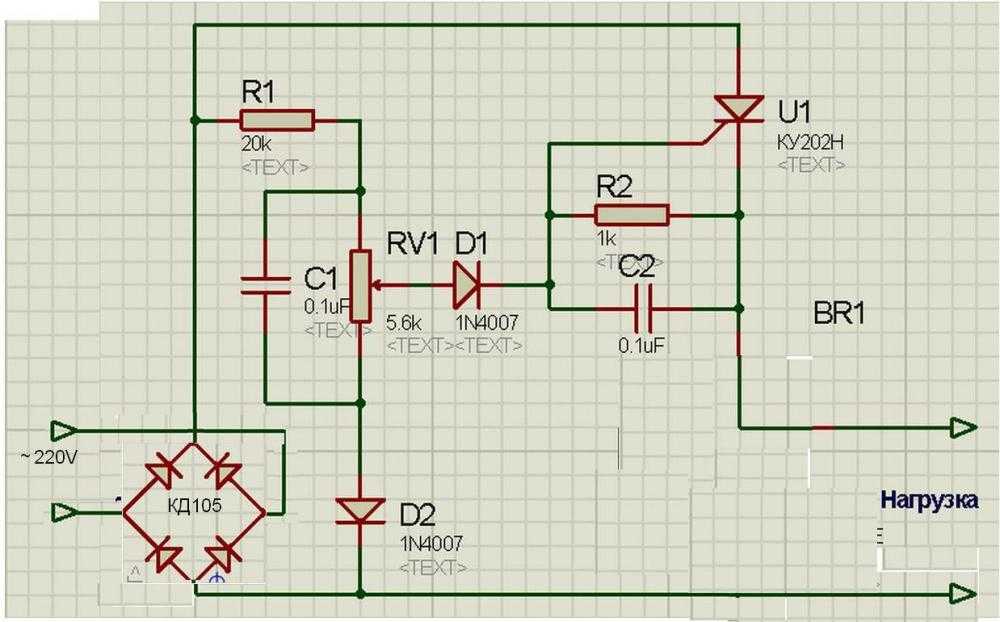 В первом и наиболее распространенном используются три датчика Холла, встроенные в статор и расположенные через равные промежутки времени, обычно 60° или 120°. Вторая, «бессенсорная» технология управления применяется для двигателей BLDC, требующих минимальных электрических соединений.
В первом и наиболее распространенном используются три датчика Холла, встроенные в статор и расположенные через равные промежутки времени, обычно 60° или 120°. Вторая, «бессенсорная» технология управления применяется для двигателей BLDC, требующих минимальных электрических соединений.
В оборудованном датчиком двигателе BLDC каждый датчик Холла объединен с переключателем, который генерирует логический «высокий» (для одного магнитного полюса) или «низкий» (для противоположного полюса) сигнал. Последовательность коммутации определяется путем объединения логических сигналов от датчиков Холла и соответствующих переключателей. В любой момент времени хотя бы один из датчиков срабатывает от одного из магнитных полюсов ротора и генерирует импульс напряжения.
На рис. 3 показана последовательность коммутации трехфазного бесконтактного двигателя постоянного тока с вращением против часовой стрелки. Датчики Холла устанавливаются в положениях «а», «б» и «в». Для каждого шага в последовательности коммутации одна обмотка (либо «U», «V» или «W») управляется высоким уровнем моста MOSFET, в то время как одна управляется низким, а третья остается плавающей. Например, в левом верхнем углу рисунка U высокий (образует N-полюс), V низкий (S) и W плавающий. Результирующее магнитное поле перемещает ротор против часовой стрелки, поскольку его постоянные магниты отталкиваются от одной обмотки и притягиваются к другой. Второй этап (ниже) показывает, что обмотка U остается на высоком уровне, в то время как V переключается на плавающий, а W переключается на низкий, таким образом поддерживая «вращение» магнитного поля и перемещая ротор вместе с ним. Остальные шаги коммутации, один электрический цикл, завершает половину механического оборота ротора.
Например, в левом верхнем углу рисунка U высокий (образует N-полюс), V низкий (S) и W плавающий. Результирующее магнитное поле перемещает ротор против часовой стрелки, поскольку его постоянные магниты отталкиваются от одной обмотки и притягиваются к другой. Второй этап (ниже) показывает, что обмотка U остается на высоком уровне, в то время как V переключается на плавающий, а W переключается на низкий, таким образом поддерживая «вращение» магнитного поля и перемещая ротор вместе с ним. Остальные шаги коммутации, один электрический цикл, завершает половину механического оборота ротора.
Рисунок 3: Последовательность электронной коммутации для трехфазного двигателя BLDC с использованием моста MOSFET и датчиков Холла. В этом случае ротор вращается против часовой стрелки, а датчики Холла («а», «b» и «с») устанавливаются с интервалом 60°. (Предоставлено MPS)
На рис. 4 показано состояние фазных обмоток по отношению к сигналам датчика Холла для двигателя, вращающегося против часовой стрелки, показанного на рис. 3 выше.
3 выше.
Рис. 4. Выход логического переключателя датчика Холла и временная диаграмма состояния обмотки для трехфазного двигателя BLDC с вращением против часовой стрелки. Обратите внимание, как минимум один логический переключатель и обмотка меняют состояние каждые 60°. (Предоставлено MPS)
Бессенсорный бессенсорный двигатель постоянного тока использует электродвижущую силу (ЭДС), которая вызывает появление тока в обмотках любого двигателя постоянного тока с магнитным полем, противодействующим исходному изменению магнитного потока в соответствии с законом Ленца. ЭДС имеет тенденцию сопротивляться вращению двигателя и поэтому называется «обратной» ЭДС. Для данного двигателя с фиксированным магнитным потоком и числом обмоток ЭДС пропорциональна угловой скорости ротора.
Контролируя обратную ЭДС, соответствующим образом запрограммированный микроконтроллер может определять относительное положение статора и ротора без использования датчиков Холла. Это упрощает конструкцию двигателя, снижает его стоимость, а также устраняет дополнительную проводку и соединения с двигателем, которые в противном случае были бы необходимы для поддержки датчиков, что повышает надежность.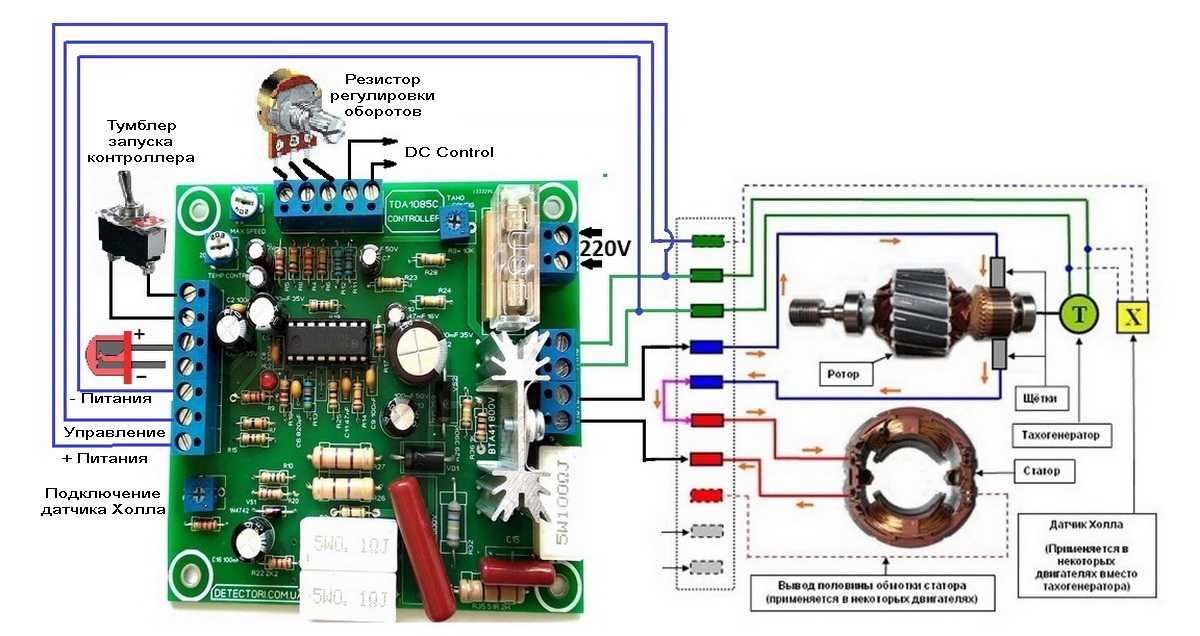
Однако, поскольку стационарный двигатель не создает противо-ЭДС, контроллер не может определить положение двигателя при запуске. Решение состоит в том, чтобы запустить двигатель в конфигурации с разомкнутым контуром до тех пор, пока не будет сгенерировано достаточное количество ЭДС, чтобы контроллер мог определить положение ротора и статора, а затем взять на себя управление. Более сложный режим управления используется, если двигатель используется в приложениях, где вращение в обратном направлении запрещено.
Обратная ЭДС, генерируемая каждой обмоткой описанного выше асинхронного двигателя постоянного тока, показана в нижней половине рисунка 5. Это сравнивается с выходным сигналом логического переключателя датчика Холла для сравнимого асинхронного двигателя постоянного тока, оснащенного датчиками. Из рисунка видно, что точки пересечения нуля ЭДС, генерируемой в обмотке, совпадают с изменениями состояния переключения логических ключей. Именно эту информацию о переходе через нуль микроконтроллер использует для запуска каждой стадии цикла коммутации в бессенсорном двигателе постоянного тока.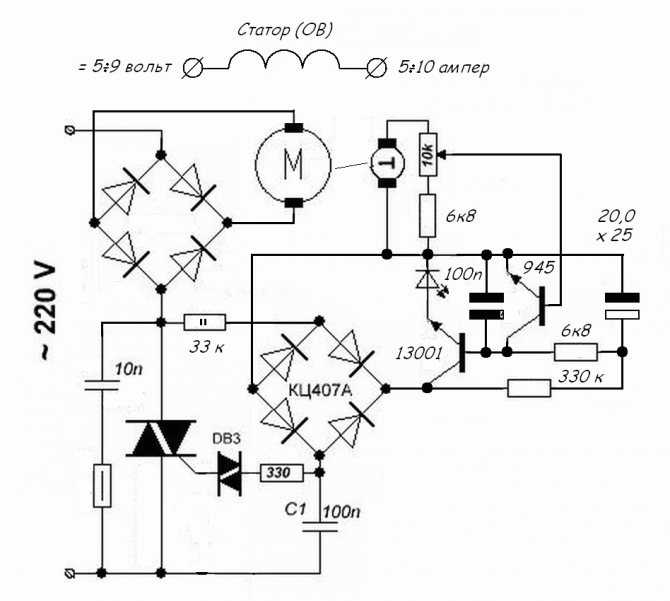 (См. статью в библиотеке «Управление бессенсорными двигателями постоянного тока с помощью обратной ЭДС».)
(См. статью в библиотеке «Управление бессенсорными двигателями постоянного тока с помощью обратной ЭДС».)
Рис. 5: Выход логического переключателя датчика Холла по сравнению с обратной ЭДС для двигателя BLDC с вращением против часовой стрелки. Обратите внимание, как точки пересечения нуля для информации об обратной ЭДС, используемой для управления двигателем BLDC без датчиков, совпадают с изменением состояния логических переключателей в двигателе BLDC, оборудованном датчиками. (Любезно предоставлено: MPS)
Проектирование двигателя BLDC
В то время как принципы коммутации двигателя BLDC задействованы, мощность двигателя BLDC и конструкция схемы управления не обязательны. На рынке имеется множество проверенных интегрированных продуктов, которые можно использовать в качестве строительных блоков для схем. Силовые модули BLDC, содержащие либо драйверы затворов, либо встроенные полевые МОП-транзисторы, лежат в основе схемы.
Трехфазный драйвер MOSFET A4915 компании Allegro Microsystems работает в качестве предварительного драйвера для шестимощного моста MOSFET для двигателя BLDC. Это устройство предназначено для продуктов с батарейным питанием. Одной из примечательных особенностей экономии энергии является спящий режим с низким энергопотреблением, который гарантирует, что устройство потребляет минимальный ток, когда двигатель не вращается. Устройство также оснащено синхронным выпрямлением — методом, заимствованным у импульсных регуляторов напряжения, для снижения энергопотребления и устранения необходимости во внешних диодах Шоттки.
Это устройство предназначено для продуктов с батарейным питанием. Одной из примечательных особенностей экономии энергии является спящий режим с низким энергопотреблением, который гарантирует, что устройство потребляет минимальный ток, когда двигатель не вращается. Устройство также оснащено синхронным выпрямлением — методом, заимствованным у импульсных регуляторов напряжения, для снижения энергопотребления и устранения необходимости во внешних диодах Шоттки.
Microchip также предлагает предварительный драйвер для шестимощного моста MOSFET для двигателя BLDC, но на этот раз для небольших бездатчиковых устройств, используемых в автомобилях, бытовой технике и товарах для хобби. В состав устройства MCP8025 входит понижающий импульсный стабилизатор для питания внешнего контроллера, а также два линейных регулятора с малым падением напряжения (LDO) и зарядный насос для питания моста MOSFET.
Этот чип упрощает работу, измеряя противоЭДС плавающей обмотки, которую затем сравнивают с нейтральной точкой двигателя.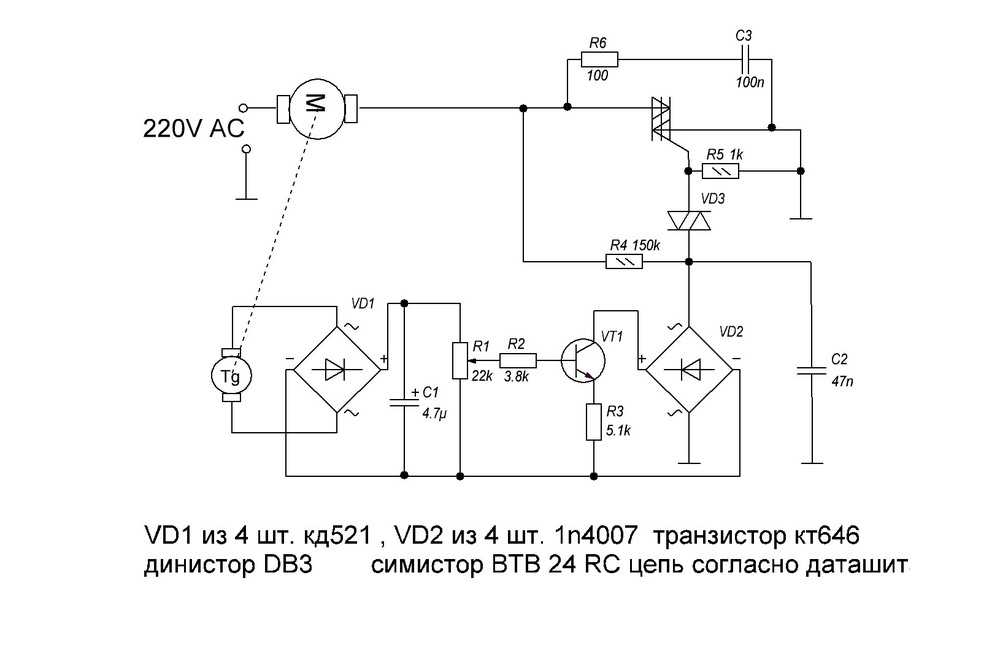 Когда обратная ЭДС пересекает нулевую точку, детектор пересечения нуля отправляет сигнал на главный контроллер, чтобы указать контрольную точку коммутации.
Когда обратная ЭДС пересекает нулевую точку, детектор пересечения нуля отправляет сигнал на главный контроллер, чтобы указать контрольную точку коммутации.
Компания Texas Instruments DRV8313 делает еще один шаг вперед, объединяя три индивидуально управляемых мостовых полупроводниковых драйвера. Преимущество этой компоновки заключается в том, что микросхема может использоваться не только для управления трехфазным двигателем постоянного тока, но и для управления двигателем с механической коммутацией (с использованием двух полукруглых мостов) или тремя независимыми соленоидами. Микросхема может подавать до 3,5 А от источника питания от 8 до 60 В.
DRV8313 не имеет входов датчиков. TI предполагает, что для сенсорной или безсенсорной работы чип должен быть объединен с микроконтроллером, таким как популярный MSP430. Такое расположение, как показано на рисунке 6, обеспечивает полную систему управления с обратной связью для трехфазного двигателя постоянного тока с датчиками.
Рис.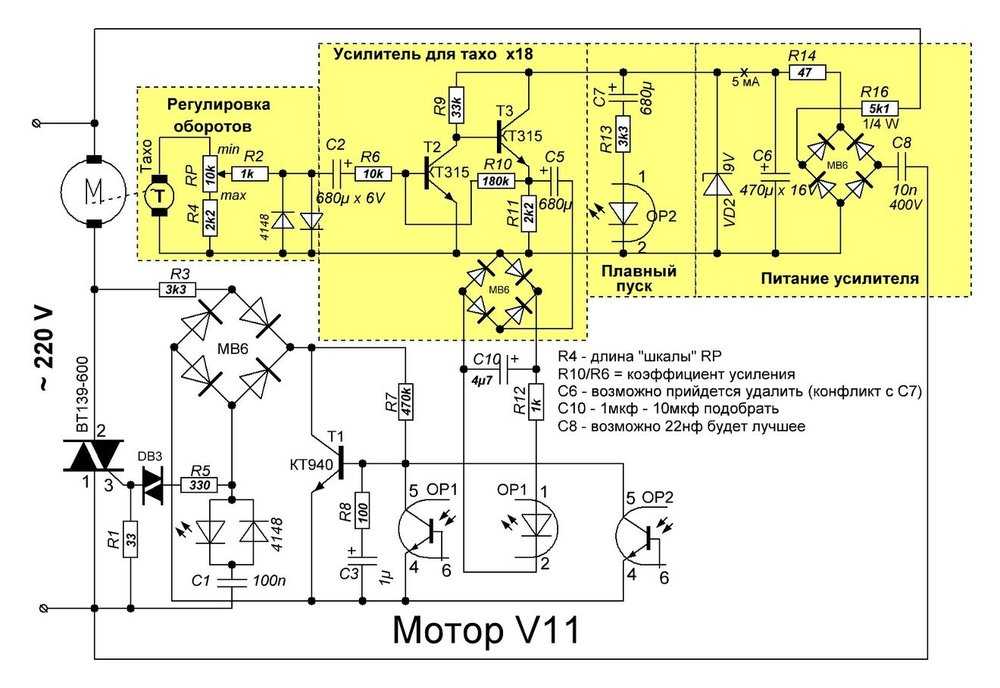 6: Полная система управления с обратной связью для трехфазного двигателя постоянного тока с датчиком. Схема включает в себя аналоговый вход скорости, микроконтроллер MSP430, контролирующий выходы ШИМ для мощных полевых МОП-транзисторов, мостовой драйвер с шестью полевыми МОП-транзисторами, мост МОП-транзисторов и двигатель постоянного тока BLDC. Положения статора и ротора двигателя определяются тремя датчиками Холла, которые подают сигналы на микроконтроллер. (Любезно предоставлено: Texas Instruments)
6: Полная система управления с обратной связью для трехфазного двигателя постоянного тока с датчиком. Схема включает в себя аналоговый вход скорости, микроконтроллер MSP430, контролирующий выходы ШИМ для мощных полевых МОП-транзисторов, мостовой драйвер с шестью полевыми МОП-транзисторами, мост МОП-транзисторов и двигатель постоянного тока BLDC. Положения статора и ротора двигателя определяются тремя датчиками Холла, которые подают сигналы на микроконтроллер. (Любезно предоставлено: Texas Instruments)
TI предлагает альтернативную часть, DRV8308, в которой не используются МОП-транзисторы. Однако он может напрямую принимать входные данные от трех датчиков Холла и, следовательно, при желании может использоваться без дополнительного микроконтроллера.
В то время как датчики Холла являются проверенным решением для обратной связи по положению, разработки в технологии датчиков положения обеспечивают большую точность и обещают более эффективную последовательность коммутации. Например, ADA4571 компании Analog Devices представляет собой угловой датчик и формирователь сигналов, который может заменить три датчика Холла типичной конструкции трехфазного двигателя BLDC одним устройством. Преимуществами являются экономия места и необходимость работы только с одиночным сигналом.
Например, ADA4571 компании Analog Devices представляет собой угловой датчик и формирователь сигналов, который может заменить три датчика Холла типичной конструкции трехфазного двигателя BLDC одним устройством. Преимуществами являются экономия места и необходимость работы только с одиночным сигналом.
ADA4571 использует технологию анизотропной магниторезистивной (AMR) технологии. Типичная реализация заключается в установке диаметрально намагниченного диска на конце вала двигателя BLDC (см. рис. 7). Магнитное поле диска проходит через плоскость датчика, и угол ротора определяется без контакта механических и электрических компонентов.
Рис. 7: Один анизотропный магниторезистивный датчик можно разместить рядом с дисковым магнитом, установленным на конце вала двигателя BLDC, заменив три датчика Холла для определения угла двигателя BLDC, сэкономив место и облегчив обработку сигналов.
ADA4571 выдает усиленные косинусоидальные и синусоидальные выходные сигналы, зависящие от угла поворота магнитного поля. Диапазон выходного напряжения пропорционален напряжению питания. Analog Devices предлагает объединить датчик с 12-разрядным АЦП AD7866 для преобразования аналоговых сигналов ADA4571 в цифровой сигнал, требуемый контроллером привода двигателя BLDC или внешним микроконтроллером.
Диапазон выходного напряжения пропорционален напряжению питания. Analog Devices предлагает объединить датчик с 12-разрядным АЦП AD7866 для преобразования аналоговых сигналов ADA4571 в цифровой сигнал, требуемый контроллером привода двигателя BLDC или внешним микроконтроллером.
Analog Devices утверждает, что использование одного датчика угла не влияет на точность коммутации, поскольку ADA4571 способен ограничивать измеренную угловую ошибку до максимума +/-0,25° для двигателей BLDC со скоростью до 25 000 об/мин.
Заключение
Электронная коммутация двигателей постоянного тока требует точного управления, что усложняет и удорожает схему двигателя. Однако отдача от эффективности, такая как снижение мощности, надежности и компактности, а также снижение веса конечного продукта, более чем компенсирует эти недостатки. Кроме того, широкий спектр проверенных интегрированных драйверов двигателей BLDC значительно упрощает процесс проектирования, добавляя гибкости разработчику для точной настройки конструкции для конкретного приложения.