Содержание
Регулировка оборотов асинхронного двигателя своими руками (схема, видео)
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками (расчет и сборку), используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее.
1
Что такое асинхронный двигатель?
1.1
Двигатели с короткозамкнутым ротором (АДКР)
1.2
Двигатели с фазным ротором
2
Принцип работы и число оборотов асинхронных двигателей
3
Способы изменения оборотов двигателя
4
Типичные схемы регуляторов оборотов
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».
Обмотка статора подключается с использованием схем «треугольника» или «звезды».
Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.
Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
- Расчет количества катушек. Полученное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),
- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
2p = Z1 / y,
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:
- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором,
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания.
 Используется для моделей с фазным ротором.
Используется для моделей с фазным ротором.
 Используется для моделей с фазным ротором.
Используется для моделей с фазным ротором.Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.
Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
Как можно регулировать обороты однофазного асинхронного двигателя
Содержание
- Как можно регулировать обороты асинхронного двигателя: обзор способов
- Изменение скорости АД с короткозамкнутым ротором
- Частотное регулирование
- Переключение числа пар полюсов
- Способы управления скоростью АД с фазным ротором
- Изменение питающего напряжения
- Активное сопротивление в цепи ротора
- Асинхронный вентильный каскад и машины двойного питания
- Плавный пуск асинхронных электродвигателей
- Как сделать устройство для изменения скорости вращения электродвигателя своими руками
- Способы регулировки оборотов вращения асинхронных двигателей
- Что такое асинхронный двигатель?
- Двигатели с короткозамкнутым ротором (АДКР)
- Двигатели с фазным ротором
- Принцип работы и число оборотов асинхронных двигателей
- Способы изменения оборотов двигателя
- Типичные схемы регуляторов оборотов
- Советы по изготовлению регулятора частоты вращения электродвигателя
- Регулирование напряжением
- Автотрансформаторное регулирование напряжения
- Тиристорный регулятор оборотов двигателя
- Транзисторный регулятор напряжения
- Частотное регулирование
- Преобразователи для однофазных двигателей
- Использование ЧП для трёхфазных двигателей
- Регулятор оборотов электродвигателя: как сделать
- Зачем нужен регулятор оборотов
- Принцип работы регулятора оборотов
- Как выбрать регулятор
- Как сделать самодельный регулятор оборотов двигателя
- Советы по изготовлению регулятора частоты вращения электродвигателя
- Схема регулятора оборотов коллекторного двигателя
- Зачем используют такой прибор-регулятор
- Регулятор оборотов электродвигателя 220в
- Как сделать регулятор своими руками
- Внедрение системы управления
- Регулировка работы
- Частотный регулятор для асинхронного двигателя-все функции
- Устройство и принцип работы, структура частотного регулятора
- Основные элементы, которые входят в структуру частотного преобразователя
- Структура частотного регулятора
- Частотные преобразователи для однофазного асинхронного электродвигателя
- Особенности использования регуляторов скорости для однофазных электродвигателей
- Популярные модели регуляторов скорости для однофазного двигателя
- 2 метода настройки, как понизить обороты двигателя асинхронного
- Однофазный АД
- Метод работы и число оборотов АД
- Подключение тока к обмотке
- Частота вращения
- Методы подстройки оборотов мотора
- Особенности частотного регулятора
- Схемы управления оборотами двигателя
- Схема тиристорного регулятора
- Схема регулятора оборотов коллекторного двигателя 220в
- Регулятор 220 В своими руками
- Усовершенствование преобразователя частоты для сети 380 в
- Видео
Как можно регулировать обороты асинхронного двигателя: обзор способов
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Существует несколько способов:
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором.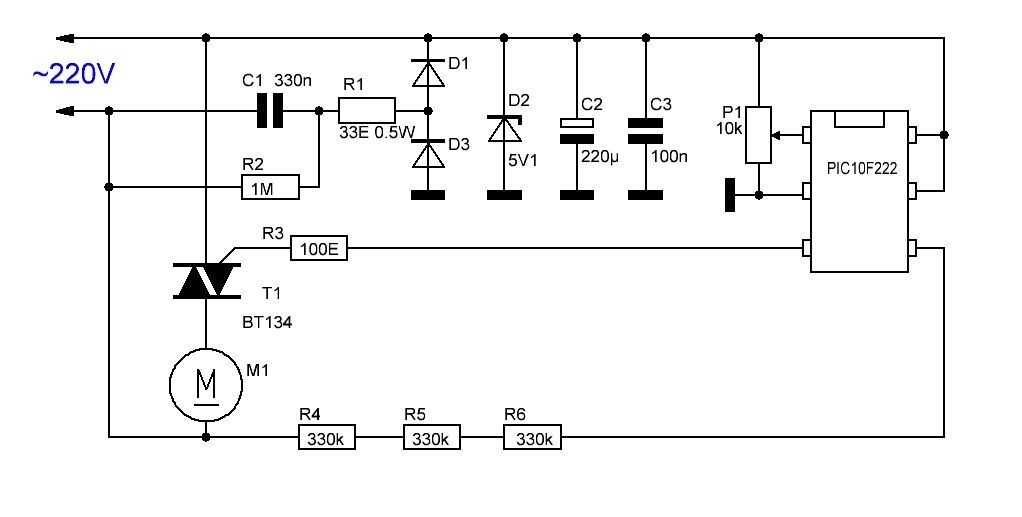 Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна.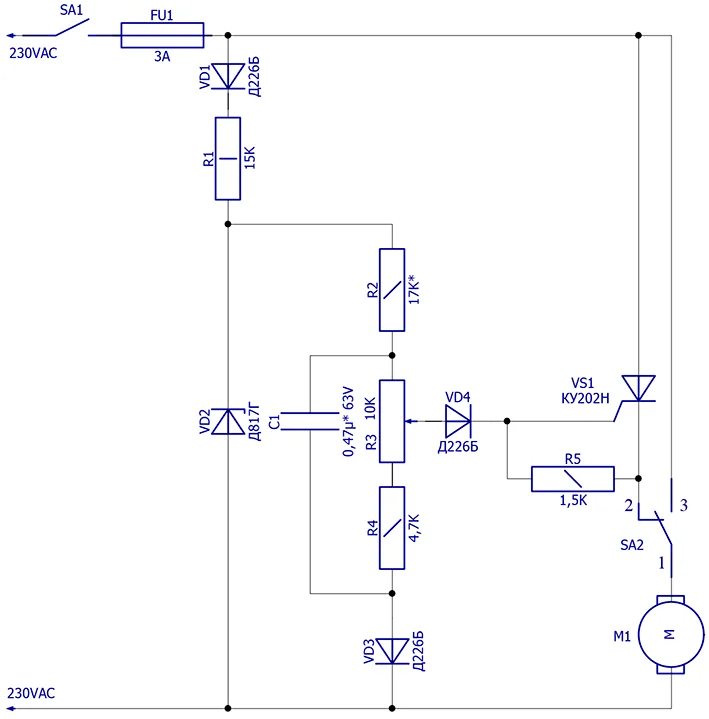 Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Источник
Способы регулировки оборотов вращения асинхронных двигателей
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками (расчет и сборку), используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании.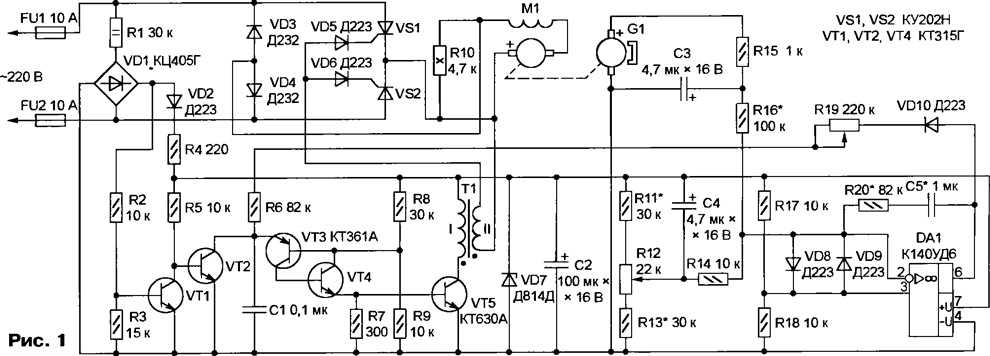 Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».
Обмотка статора подключается с использованием схем «треугольника» или «звезды».
Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.
Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.
Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
Источник
Советы по изготовлению регулятора частоты вращения электродвигателя
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
Регулирование напряжением
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Достоинства тиристорных регуляторов:
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
Преобразователи для однофазных двигателей
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Регулятор оборотов электродвигателя: как сделать
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото — мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии.
Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов.
При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото — регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото — шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз.
Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя.
Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото — схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии.
Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде.
Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Фото — синусоида нормальной работы электродвигателя
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото — схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото — схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Советы по изготовлению регулятора частоты вращения электродвигателя
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств.
Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого.
Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор.
При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер.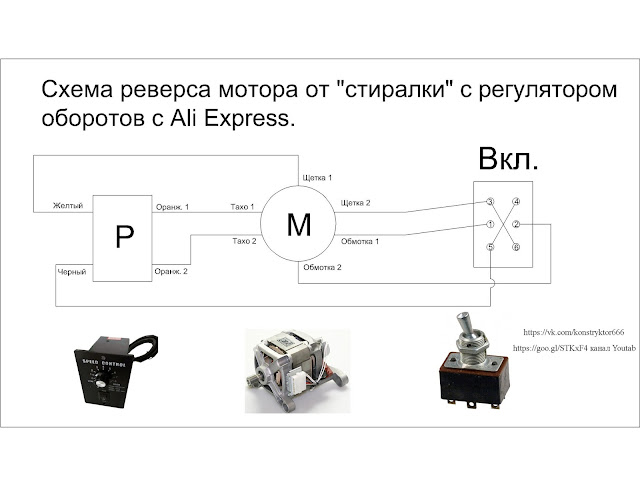 В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Регулировка работы
Теперь стоит поговорить о том, как можно осуществить регулировку оборотов в коллекторном двигателе. В связи с тем, что общая скорость вращения мотора может напрямую зависеть от величины подаваемого уровня напряжения, для этого вполне пригодны совершенно любые системы для регулировки, которые могут осуществлять такую функцию.
Стоит перечислить несколько разновидностей приборов:
Наиболее приемлемым вариантом станет выполнение функции регулировки оборотов при помощи применения тахогенератора.
Его чаще всего устанавливают на заводе.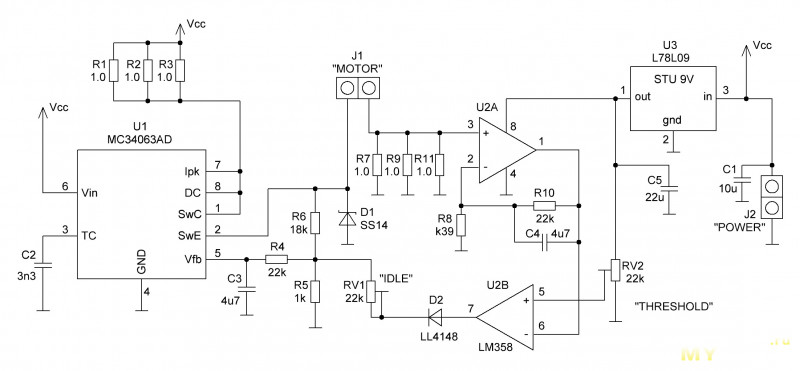 Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Как же это выглядит в виде конструкции? Больше всего используется именно реостатная регулировка процесса вращения, которая создана на основе применения полупроводника.
В первом случае речь пойдёт о переменном сопротивлении с использованием механического процесса регулировки. Она будет последовательно подключена к коллекторному электродвигателю.
Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора.
Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Во втором случае во время применения полупроводников происходит процесс управления мотором при помощи подачи определённого числа импульсов. Схема способна совершать изменение длительности таких импульсов, что, в свою очередь, будет изменять общую скорость вращения мотора без потери показателя мощности.
Частотный регулятор для асинхронного двигателя-все функции
Регулируемый асинхронный привод широко распространен и популярен так, что фактически заменил собой синхронные электродвигатели и привод постоянного тока.
Варианты регулировки скорости электродвигателя включают несколько существующих способов:
Во многом это произошло благодаря появлению частотных преобразователей, обеспечивающих энергетические и динамические показатели. Использование частотного регулятора скорости считается самым прогрессивным и востребованным методом, входящим в способы регулировки оборотов вращения асинхронных двигателей.
com/embed/pj0IJ_rHoaw?feature=oembed»>
Основное предназначение, которое выполняет частотный регулятор скорости для асинхронного двигателя основывается на осуществлении питания таким образом, чтобы рабочие характеристики агрегата радикально отличались от обычных параметров, получаемых из сети. При этом напряжение в сети и частота должны остаться неизменными.
Устройство и принцип работы, структура частотного регулятора
Принцип работы частотного регулятора для асинхронного двигателя заключается в питании электродвигателя переменным напряжением с меняющимися по необходимости, параметрами амплитуды и частоты. При этом поддержка соотношения напряжение/частота остаются четко определенными и неизменными. Генерирование переменного напряжения происходит благодаря силовому электронному преобразователю.
Рис. №1 Принципиальная схема преобразователя частоты.
Принцип работы подразумевает использование широтно-импульсной модуляции. Принцип подразумевает подачу импульсного напряжения на обмотки двигателя с амплитудой равной напряжению, полученному от выпрямителя.
Импульсы модулированы по ширине и создают напряжение переменного тока с изменяющейся амплитудой.
Наглядным примером могут считаться кривые междуфазного напряжения и тока в одной обмотке двигателя при соединении обмоток треугольником.
Рис. №2 График напряжения на выходе ШИМ и ток в двигательной обмотке при соединении трехфазного асинхронного двигателя в треугольник.
Основные элементы, которые входят в структуру частотного преобразователя
Частотный преобразователь состоит из следующих компонентов:
Структура частотного регулятора
В настоящее время детально разработаны и широко применяются две основные топологии многоуровневых частотных преобразователей. Это каскадные и преобразователи на базе многоуровневых частотных инверторов напряжения.
Рис. №3 Структурная схема частотного преобразователя многоуровневого типа высокого напряжения, построенная на базе IGBT-транзисторов с воздушным или водяным охлаждением.
В состав устройства включен многообмоточный трансформатор.
К особенностям схемы относится наличие силовых ячеек с последовательным соединением, благодаря чему на выходе устройства получается суммарное высокое напряжение.
Подобная схема служит для получения формы выходного напряжения практически приближенной к идеальному синусу. Наличие шунтируемых в момент неисправности ячеек обуславливает высокую надежность схемы.
Как продолжение предыдущей схемы рассмотрим схему преобразователя на базе трансформаторного многоуровневого инвертора напряжения с широтно-импульсной модуляцией с применением IGBT-модулей. Для устройства характерна фиксированная частота ШИМ – 3кГц. В структуру устройства включены система защиты с использованием микропроцессора.
Рис. 4 Структурная схема преобразователя.
На схеме видно, что все блоки функционально взаимосвязаны. На схеме показано как работает частотный регулятор для асинхронного двигателя, устройство и принцип работы.
В первом блоке находится входной трансформатор, в блоке осуществляется передача электроэнергии от трехфазного высоковольтного источника питания. От многоуровневого трансформатора производится распределение пониженного напряжения в шкаф инвертора на многоуровневый инвертор.
Шкаф инвертора включает в состав многоуровневый трехфазный инвертор, состоящий из ячеек – преобразователей.
В каждой находится шестиимпульсный фильтр для выпрямления звена постоянного тока и мостовой инвертор напряжения на IGBT-транзисторах.
По схеме происходит выпрямление входного переменного тока, который благодаря инвертору изменяется в переменный ток, обладающий регулируемыми показателями частоты и напряжения.
В шкафу защиты управления находятся микропроцессорный блок, обладающий многофункциональными возможностями и системой питания от ТСН преобразователя, устройство ввода преобразователя и первичные сенсоры, обозначающие режимы работы преобразователя.
Микропроцессор служит для формирования сигналов управления инвертором в зависимости от обозначенного алгоритма работы. Он служит для обработки сведений, собранных с датчиков напряжения и тока. Микропроцессор формирует сигналы для управления защитами и аварийными кнопками управления, корректирует алгоритм управления.
Для передачи сведений и связи используется оптоволоконный кабель. Для бесперебойной работы имеется независимый встроенный источник питания. Редактирование параметров выполняется пультом дистанционного управления.
Для надежного отключения и безопасного проведения различного рода работ преобразователь оборудован линейным разъединителем.
Рис. №5 Обобщенная схема ячейки преобразователя
Источники управляемого переменного напряжения формируют фазу напряжения для выполнения их последовательного соединения. Выходная схема питающей сети асинхронного двигателя происходит по схеме соединения обмоток «Звезда». Напряжение в трехфазном инверторе распределяется по схеме.
Рис. №6 Схема распределения напряжения в инверторе на три фазы.
Частотные преобразователи для однофазного асинхронного электродвигателя
Использование малогабаритных частотных преобразователей применяется при управлении скоростью вращения однофазных двигателей, применяемых в конструкциях бытовых устройств и для производства технологических процессов. Подробней про регулирование однофазного асинхронного двигателя с помощью частотного преобразователя смотрите здесь.
Частотный регулятор скорости для асинхронного двигателя будет необычайно актуальным в схемах управления такими приборами, как кондиционеры воздуха, холодильные камеры, электрические вентиляторы, насосы, все оборудование с использованием асинхронных электродвигателей.
Особенности использования регуляторов скорости для однофазных электродвигателей
В конструкцию частотного регулятора входит несколько элементов, обеспечивающих эффективность работы устройства, к ним относятся:
К преимущественным особенностям использования регуляторов скорости относятся инновационные технологии векторного управления. Значительная энергосберегающая эффективность – это функция, которая обеспечивается в автоматическом режиме. Управление регулятором скорости можно выполнять с помощью дистанционного пульта управления, минимальное расстояние для управления 5м.
Важно: в конструкции преобразователя частоты предусмотрена возможность автоматически регулировать выходное напряжение.
Популярные модели регуляторов скорости для однофазного двигателя
Среди многообразия устройств, выполняющих функцию управления электродвигателем, существуют две основные разновидности моделей регуляторов оборотов.
Это электронные тиристорные однофазные регуляторы скорости, которые работают за счет плавного изменения напряжения питания. Вторая разновидность моделей регуляторов оборотов – трансформаторный однофазный регулятор скорости.
Его работа заключается в изменении положения трехступенчатого кулачкового переключателя, с помощью которого происходит изменение комбинации переключения обмоток.
Частотное управление регулированием скоростью асинхронного электродвигателя в наше время является техническим стандартом. Использование частотного регулятора вытеснило очень многие способы управления. Симметричное и несимметричное управление напряжением и использование добавочных сопротивлений, изменение числа пар полюсов ушли в прошлое.
Частотник, частотный преобразователь 220 — 380 регулятор оборотов электродвигателя
2 метода настройки, как понизить обороты двигателя асинхронного
Однофазный АД
Используется в большей части электромоторов. Ротор короткозамкнутый. При подключении в основную обмотку поступает ток, ротор начинает вибрировать (для вращения ему нужен пусковой механизм).
Ротор короткозамкнутый. При подключении в основную обмотку поступает ток, ротор начинает вибрировать (для вращения ему нужен пусковой механизм).
Метод работы и число оборотов АД
Основными деталями асинхронного мотора являются ротор и статор. Напряжение, которое передается на обмотку стартера, образует магнитные потоки. Они отклонены геометрически на 1200С.
Магнитное поле и ток в обмотках формируют электромагнитный поток, который заставляет ротор крутиться. Кроме того, в проводниках ротора возникает ЭДС. В замкнутой электрической цепи обмотки ротора появляется ток, который взаимодействует с магнитным полем стартера. В результате создается момент, когда ротор начинает вращаться.
Подключение тока к обмотке
Обмотка стартера и ротора могут подключаться к различным источникам тока. о того, их соединяют параллельно или последовательно — именно поэтому АД встречаются в большинстве бытовых электроприборов.
Частота вращения
Обычно тех. характеристики указаны на корпусе двигателя. Если такой информации по какой-то причине нет, то число оборотов вычисляют по другим признакам:
Если такой информации по какой-то причине нет, то число оборотов вычисляют по другим признакам:
Методы подстройки оборотов мотора
Регулятор частоты вращения асинхронного двигателя позволяет установить необходимый режим работы более ровно, чем с механическим редуктором. В основном, применяется семь основных видов регулировки. Они подразделяются на два направления:
Регулировка оборотов асинхронного двигателя своими руками позволит точно настроить рабочие режимы. При использовании этих способов происходит варьирование скорости вращения без снижения мощности и потери коэффициента полезного действия.
Особенности частотного регулятора
Отрегулировать обороты двигателя можно с помощью частотного регулятора. На сегодняшний момент это основной способ регулировки мощности устройств, в которых приводом является электромотор. Регулятор частоты вращения двигателя позволяет изменять скорость с помощью полупроводниковых преобразователей.
Схемы управления оборотами двигателя
Схема тиристорного регулятора
Тиристорный регулятор оборотов двигателя постоянного тока используют для корректировки нагрузки в лампах накаливания и других электроприборах. Схема управления упорядочивает момент открытия/закрытия тиристоров относительно перехода фазы через ноль.
Схема управления упорядочивает момент открытия/закрытия тиристоров относительно перехода фазы через ноль.
Схема регулятора оборотов коллекторного двигателя 220в
Регулятор оборотов коллекторного двигателя работает от стандартного напряжения в сети. Используется в обычных бытовых приборах.
Регулятор 220 В своими руками
Регулятор оборотов коллекторного двигателя 220в своими руками сделать не сложно. Для этого следует придерживаться определенной схемы. Самодельный регулятор оборотов двигателя будет контролировать 1 полупериод. Для серьезной техники лучше приобрести магазинный вариант.
Усовершенствование преобразователя частоты для сети 380 в
Управление скоростью электродвигателя вентилятора осуществляется с помощью частотного регулятора РМТ, принцип работы которого основан на регулировке частоты. Чтобы узнать, как понизить обороты двигателя, следует обратить внимание на схему:
Источник
Видео
Регулировка оборотов асинхронного двигателя
Частотник и однофазный мотор? Никогда!
Регулировка оборотов на электродвигателе в сети 220 вольт
Как просто ограничить обороты вытяжки с асинхронным двигателем
Как подключить однофазный двигатель на примере ⚡ АИРЕ 80 С2 2,2кВт 3000об/мин
Регулятор оборотов электродвигателя 220В
Изменение направления вращения однофазного асинхронного двигателя.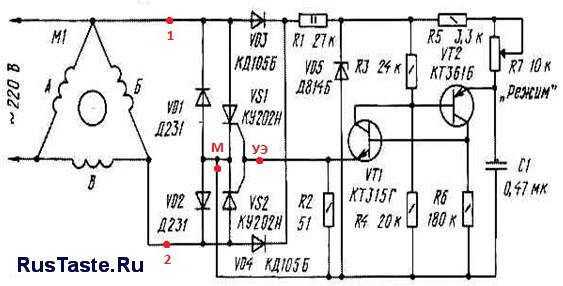
Диммер своими руками, регулятор мощности. Регулятор оборотов электродвигателя 220В.
Чем регулировать обороты коллекторного и асинхронного мотора стиральной машины.
Регулятор оборотов с сохранением мощности
Справочные материалы о кондиционерах
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
S=(n1-n2)/n2
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.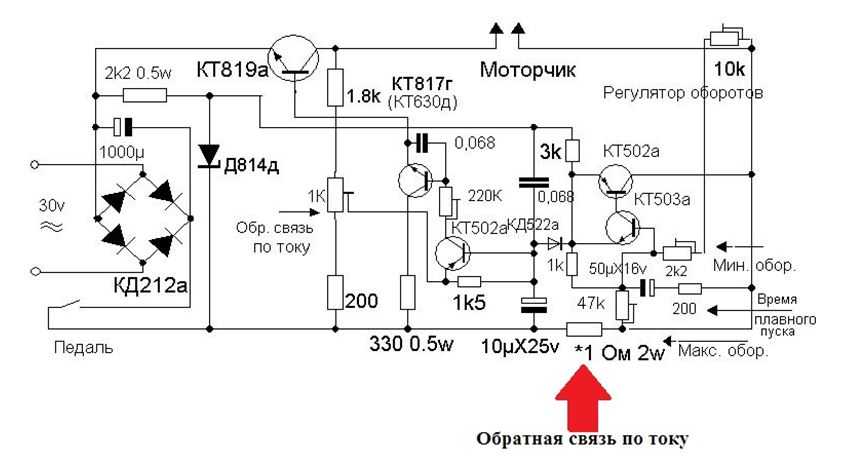
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
Xc=1/2πfC
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т. к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
 к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателямиустройство и принцип работы прибора, достоинства и недостатки
Типы регулировки
Существует довольно много вариантов регулировки оборотов. Вот основные из них:
- Блок питания с регулировкой выходного напряжения.
- Заводские устройства регулировки, которые идут изначально с электромотором.
- Регуляторы на кнопочном управлении и стандартные регуляторы, которые просто ограничивают напряжение.
Эти типы регулировки плохи тем, что с уменьшением или увеличением напряжения падает и мощность. В некоторых электроинструментах это допустимо, но, как показывает практика, в большинстве случаев это является неприемлемым из-за сильного падения мощности и, соответственно, КПД.
Наиболее приемлемым вариантом будет регулятор на основе симистора или тиристора. Мало того что такой регулятор не уменьшает мощность при уменьшении напряжения, он еще и позволяет осуществлять более плавный пуск и регулировку оборотов. К тому же такую схему можно сделать своими руками. Ниже изображен регулятор оборотов с поддержанием мощности. Схема собрана на базе симистора BTA 41 800 В.
К тому же такую схему можно сделать своими руками. Ниже изображен регулятор оборотов с поддержанием мощности. Схема собрана на базе симистора BTA 41 800 В.
Все номиналы электроэлементов обозначены на схеме. Это схема после сборки, работает довольно стабильно и обеспечивает плавную регулировку коллекторного двигателя. При уменьшении выходного напряжения мощность не уменьшается, что является весомым плюсом.
При желании можно собрать регулятор оборотов коллекторного двигателя 220 В своими руками. Эта схема собрана на базе симистора ВТА26−600, который предварительно необходимо установить на радиатор, так как при нагрузке этот элемент довольно сильно греется.
Схема выглядит следующим образом.
Она успешно справится с регулировкой таких электроинструментов, как дрель, болгарка, циркулярка, лобзик. При желании можно использовать схему в качестве регулятора мощности ТЭН-ов, обогревателей и в качестве диммера. К минусам можно отнести невозможность регулировки мощности приборов, которые питаются от постоянного тока.
https://youtube.com/watch?v=vVeR4jVfTIg
Виды устройств
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Измерения
Понятно, что число оборотов нужно как-то определять. Для этого используют тахометры. Они показывают число вращения на данный момент. Обычным мультиметром просто так измерить скорость не получится, разве что на автомобиле.
Они показывают число вращения на данный момент. Обычным мультиметром просто так измерить скорость не получится, разве что на автомобиле.
Как видно, на электрических машинах можно менять различные параметры, подстраивая их под нужды производства и домашнего хозяйства.
Декор дня рождения своими руками
Закрыть…
Ковбойские остроносые сапогиПринцип работы самодельного замка заключается в следующем. В одной его половине находится постоянный магнит. а в другой — металлическая пластина. Одна из них крепится к двери. Вторая, с удаленной металлической пластиной, оснащается герконом КЭМ-1 и крепится к дверной коробке. Если дверь находится в закрытом положении, две части замка прижимаются, магнит оказывает действие на геркон, замыкая его контакты. Если же дверь открывается, магнит уходит, и контакты геркона размыкаются.
Батарея, системный блок компьютера, даже блок питания для ноутбука — это все лучшие друзья. Я уже молчу, про такие хорошие грелки, как мы с мужем.
Берите наполнитель и набивайте куклу. Когда полностью равномерно распределите набивку, зашейте изделие. Ручки необходимо пришивать к туловищу практически около самой шеи.
Из одной паллеты, отшлифованной, пропитанной и лакированной, получается садовый столик вроде журнального, слева на рис. Если в наличии есть пара, из них буквально за полчаса можно сделать настенный рабочий стол-стеллаж, в центре и справа. Цепи для него также можно сплести самому из мягкой проволоки, обтянутой трубкой из ПВХ или, лучше, термоусаживаемой. Для полного поднятия столешницы мелкий инструмент укладывают на полку настенной паллеты.
Ну а если стеклянную чашу, вазу, конфетницу, сосуд для пунша или обыкновенные бокалы наполнить водой, разбросав на дне морскую гальку, и отпустить в «свободное плавание» свечи-таблетки, получим волшебную подсветку для романтического Нового года. Для более интересного и неожиданного эффекта можно поэкспериментировать с цветом воды.Как производится установка шипов на резину?
Игрушки ручной работы для детей — это красиво, дешево и приятно.![]() Каждый ребенок нуждается в оригинальных и обучающих игрушках, но не всегда есть возможность их приобрести. Сегодня мы покажем вам 5 примеров веселых игрушек, которые вы можете сделать самостоятельно. Они могут быть сделаны из картона, бумаги или дерева. В общем вдохновляйтесь и чаще радуйте своих детей.
Каждый ребенок нуждается в оригинальных и обучающих игрушках, но не всегда есть возможность их приобрести. Сегодня мы покажем вам 5 примеров веселых игрушек, которые вы можете сделать самостоятельно. Они могут быть сделаны из картона, бумаги или дерева. В общем вдохновляйтесь и чаще радуйте своих детей.
Для основания такой конструкции можно использовать толстую фанеру, а для её верхней части – поликарбонат. Найти в сети солнечные батареи сегодня тоже не проблема.
Внимание! При стыковке панелей не стоит прилагать слишком большие усилия, вы можете повредить место стыка. Именно столько ножей должно быть у хозяйки на кухне, чтобы процесс приготовления пищи всегда был простым и приятным.
Именно столько ножей должно быть у хозяйки на кухне, чтобы процесс приготовления пищи всегда был простым и приятным.
Для изготовления кормушки своими руками нам потребуется:
Расчет древесины. Доски, носящие название клепки, имеют двояковыпуклые стороны для придания бондарному изделию выпуклости.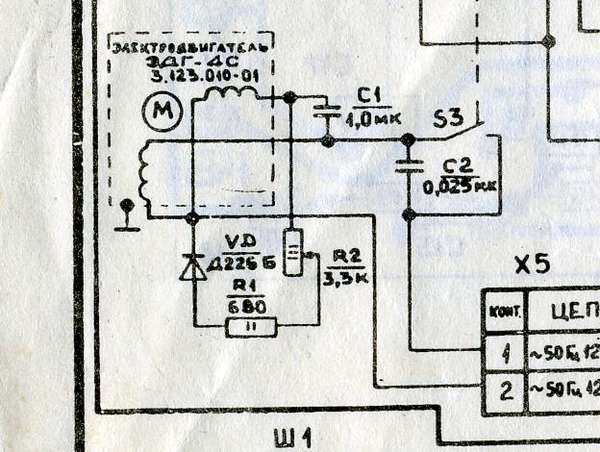 Чтобы их сделать такими, нужно взять нижнюю часть ствола дерева и расколоть подобием рубки дров. Если его аккуратно пилить, то нарушится природная целостность волокон, что плохо для такого изделия. Сразу приступать к фигурному выпиливанию не стоит – поленья нужно просушить в течение 2 месяцев. Причем сушить не под палящим солнцем, а в темном прохладном помещении.
Чтобы их сделать такими, нужно взять нижнюю часть ствола дерева и расколоть подобием рубки дров. Если его аккуратно пилить, то нарушится природная целостность волокон, что плохо для такого изделия. Сразу приступать к фигурному выпиливанию не стоит – поленья нужно просушить в течение 2 месяцев. Причем сушить не под палящим солнцем, а в темном прохладном помещении.
Как плести браслеты из шнурков
Тот факт, что большинство новогодних костюмов для детей дошкольного возраста легко шьются на основе комбинезона, может значительно сузить и облегчить творческий поиск. Если научится шить комбинезон — основу для новогоднего костюма и придумать (почерпнуть), смастерить своими руками декоративные элементы к нему, то можно сделать удивительные и довольно интересные модели новогодних нарядов для детей. Главное заранее все продумать до мелочей, вооружится знаниями по теме — чтобы результат труда приятно удивил и порадовал всех.
Проектирование шкафа-купе
Картинки
Подарок маме на день рождения своими руками фото инструкция
Похожие новости
.
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Изготовление самодельных реле
Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:
- Проволочные резисторы.
- Переключатель на несколько положений.
- Блок управления и реле.
Использование проволочных резисторов позволяет изменять напряжение питания, соответственно, и частоту вращения двигателя. Такой регулятор обеспечивает ступенчатый разгон двигателя, отличается простой конструкции и может быть выполнен даже начинающими радиолюбителями. Такие простейшие самодельные ступенчатые регуляторы можно использовать с асинхронными и контактными двигателями.
Принцип работы самодельного преобразователя:
- Питание от сети направляется на конденсатор.
- Используемый конденсатор полностью заряжается.
- Нагрузка передается на резистор и нижний кабель.
- Электрод тиристора, соединенный с положительным контактом на конденсаторе, получает нагрузку.
- Передаётся заряд напряжения.
- Происходит открытие второго полупроводника.
- Тиристор пропускает полученную с конденсатора нагрузку.
- Конденсатор полностью разряжается, после чего повторяется полупериод.
В прошлом наибольшей популярностью пользовались механические регуляторы, выполненные на основе вариатора или шестеренчатого привода. Однако они не отличались должной надежностью и часто выходили из строя.
Самодельные электронные регуляторы зарекомендовали себя с наилучшей стороны. Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.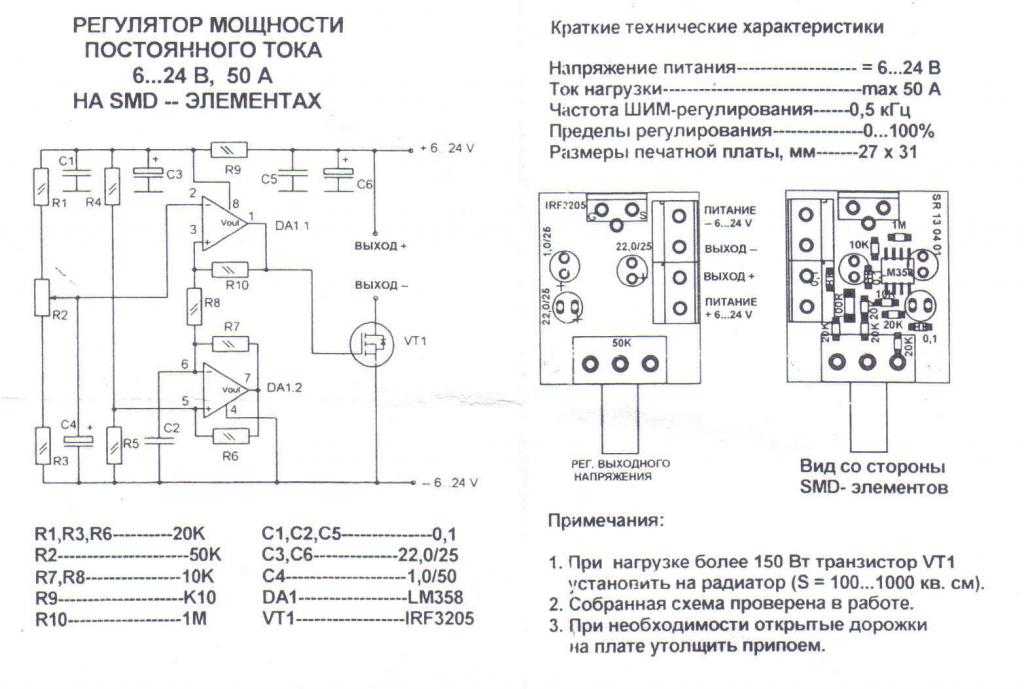
Дополнительное использование в схемах электронных регуляторов симисторов и аналогичных устройств позволяет обеспечить плавное изменение мощности напряжения, соответственно электродвигатель будет правильно набирать обороты, постепенно выходя на свою максимальную мощность.
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.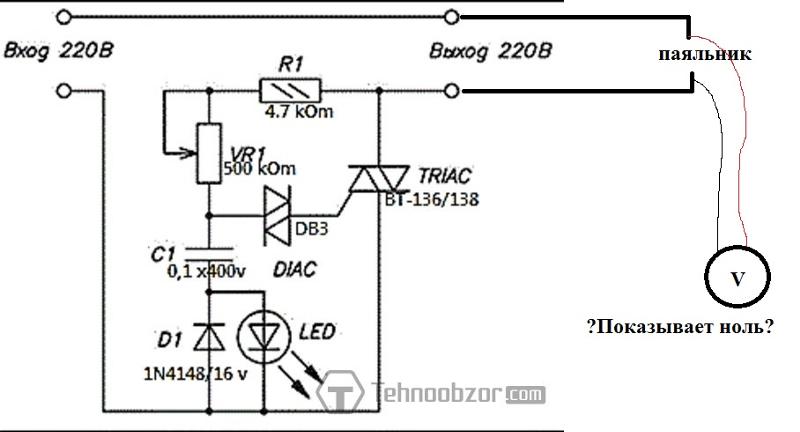
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Использование широтно-импульсной модуляции
Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа, можно использовать импульсный регулятор-стабилизатор напряжения (инвертор).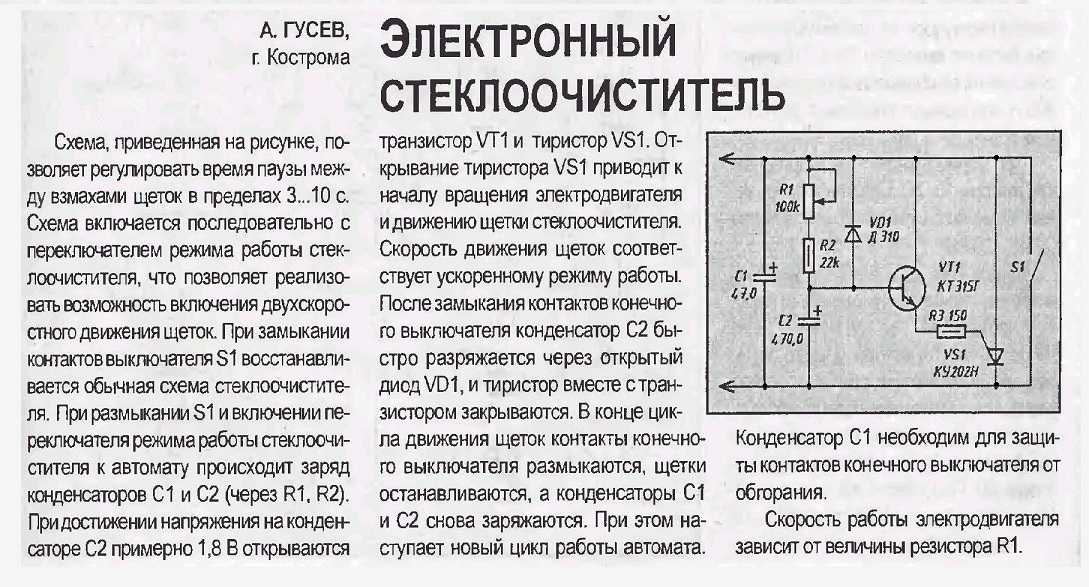 Он будет выполнять функцию источника питания. В его основу положено применение импульсного ШИМ-регулятора марки ТL494. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
Он будет выполнять функцию источника питания. В его основу положено применение импульсного ШИМ-регулятора марки ТL494. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
На рисунке выше изображена схема использования ШИМ-регулятора для трехфазного асинхронного двигателя, подключенного через конденсатор к однофазной сети.
Этот способ, несмотря на свою эффективность, имеет два существенных недостатка – это:
- невозможность реверсивного управления двигателем без использования дополнительных коммутирующих аппаратов;
- частотные преобразователи , использованные в регуляторе, отличаются высокой стоимостью и выпускаются ограниченным числом производителей.
Принцип работы однофазной асинхронной машины
При однофазном питании асинхронника в нем вместо вращающегося магнитного поля возникает пульсирующее, которое можно разложить на два магнитных поля, которые будут вращаться в разные стороны с одинаковой частотой и амплитудой. При остановленном роторе электродвигателя данные поля создадут моменты одинаковой величины, но различного знака. В итоге результирующий пусковой момент будет равен нулю, что не позволит двигателю запустится. По своим свойствам однофазный электродвигатель похож на трехфазный, который работает при сильном искажении симметрии напряжений:
При остановленном роторе электродвигателя данные поля создадут моменты одинаковой величины, но различного знака. В итоге результирующий пусковой момент будет равен нулю, что не позволит двигателю запустится. По своим свойствам однофазный электродвигатель похож на трехфазный, который работает при сильном искажении симметрии напряжений:
на рисунке а) показана схема асинхронной однофазной машины, а на б) векторная диаграмма
Основные виды однофазных электроприводов
Как упоминалось однофазный двигатель не может развивать пусковой момент, следствием чего становится невозможность его самостоятельного запуска. Для этого придумали несколько способов компенсации магнитного поля противоположного по знаку основному.
Двигатели с пусковой обмоткой
В данном способе пуска кроме основной обмотки Р, имеющей фазную зону 120 0 , на статор наматывают еще и пусковую П, которая имеет фазную зону 60 0 . Также пусковая обмотка сдвигается относительно рабочей на 90 0 электрических. Для того, чтоб создать фазовый сдвиг между токами обмоток Iр и Iп последовательно в пусковую обмотку подключают элемент, приводящий к сдвигу фаз ψ (фазосдвигающее сопротивление Zп):
Где: а) схема подключения машины, б) векторные диаграммы при использовании различных сопротивлений.
Наилучшими условиями для пуска будет включения конденсатора в пусковую обмотку. Но поскольку емкость конденсатора довольно велика, соответственно и его стоимость и габариты тоже возрастают. Зачастую его применяют для получения повышенного момента для пуска. Пуск с помощью индуктивности имеет наихудшие показатели и в настоящее время не используется. Довольно часто могут применять запуск с помощью активного сопротивления, при этом пусковую обмотку делают с повышенным активным сопротивлением. После запуска электродвигателя пусковая обмотка отключается. Ниже показаны схемы включений и их пусковые характеристики:
Где: а,б) двигатели с пусковой обмоткой, в,г) конденсаторные
Конденсаторный двигатель
Данный тип электродвигателя имеет две рабочие обмотки, в одну из которых подключают рабочую емкость Ср. Данные обмотки сдвинуты относительно друг друга на 90 0 электрических и имеют фазные зоны тоже 90 0 . При этом мощности обеих обмоток равны, но их токи и напряжения различны, также различны количества витков. Иногда величины конденсатора рабочего не достаточно для формирования нужного пускового момента, поэтому параллельно ему могут вешать пусковой, как это показано на рисунке выше. Схема приведена ниже:
Данные обмотки сдвинуты относительно друг друга на 90 0 электрических и имеют фазные зоны тоже 90 0 . При этом мощности обеих обмоток равны, но их токи и напряжения различны, также различны количества витков. Иногда величины конденсатора рабочего не достаточно для формирования нужного пускового момента, поэтому параллельно ему могут вешать пусковой, как это показано на рисунке выше. Схема приведена ниже:
Где: а) схема конденсаторного электродвигателя, б) его векторная диаграмма
В данном типе однофазных машин коэффициент мощности cosφ даже выше чем у трехфазных. Это объясняется наличием конденсатора. КПД такого электродвигателя выше, чем однофазного электродвигателя с пусковой обмоткой.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
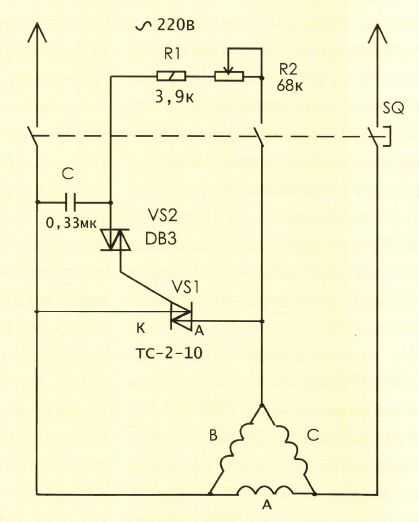
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.

Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.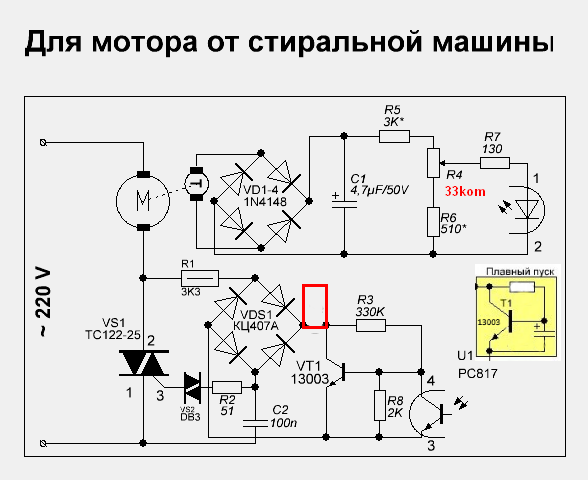
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
- Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
- Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
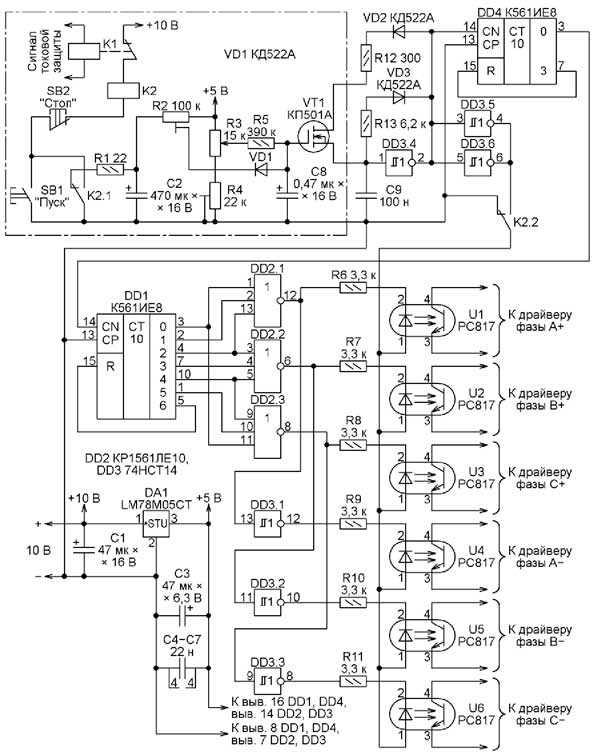 Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс.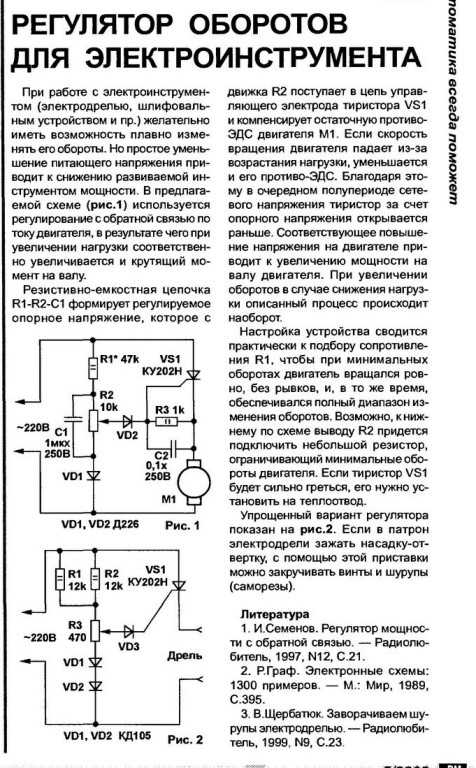 На рисунке не указано.
На рисунке не указано.
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2».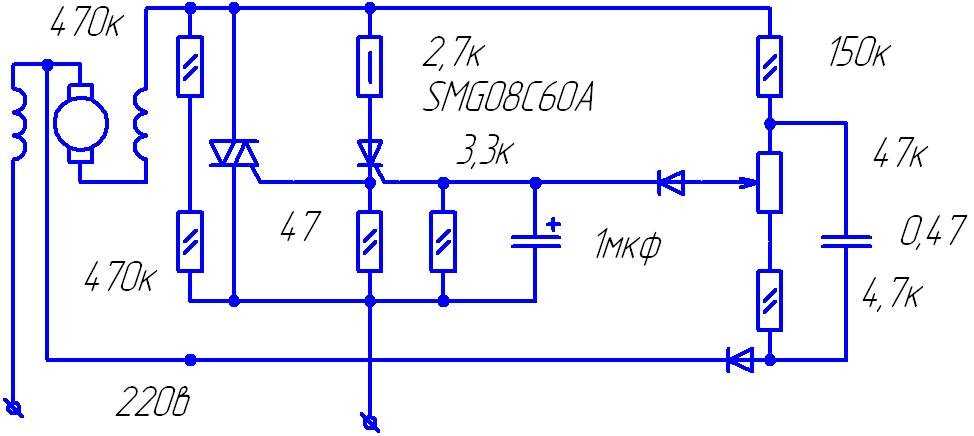 При разряде С2 симистор открывается в течение некоторого времени.
При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.

Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
 Скажем, для ручного фрезера будет достаточно 1000 Герц;
Скажем, для ручного фрезера будет достаточно 1000 Герц;Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Регулировка скорости вращения асинхронного электродвигателя 220в. Регулировка оборотов асинхронного двигателя
егулировка оборотов электродвигателя часто бывает необходима как в производственных, так и каких то бытовых целях. В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – . А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – . А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
Необходимо сразу сказать, что для разных типов однофазных и трехфазных электрических машин должны применяться разные регуляторы мощности. Т.е. для асинхронных машин применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей, недопустимо.
Лучший способ уменьшить обороты вашего устройства – не в регулировке частоты вращения самого движка, а посредством редуктора или ременной передачи. При этом сохранится самое главное – мощность устройства.
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением (для переменного тока применяется только первые два вида возбуждения).
Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через соединенные определенным образом обмотки статора и ротора, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается при помощи щеток из мягкого электропроводного материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
При одновременном
изменении подключения и ротора и статора реверсирования не произойдет. Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Электродвигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статорная) в двигателе с параллельным возбуждением состоит из большого количества витков тонкого провода и включена параллельно ротору, сопротивление обмотки которого намного меньше.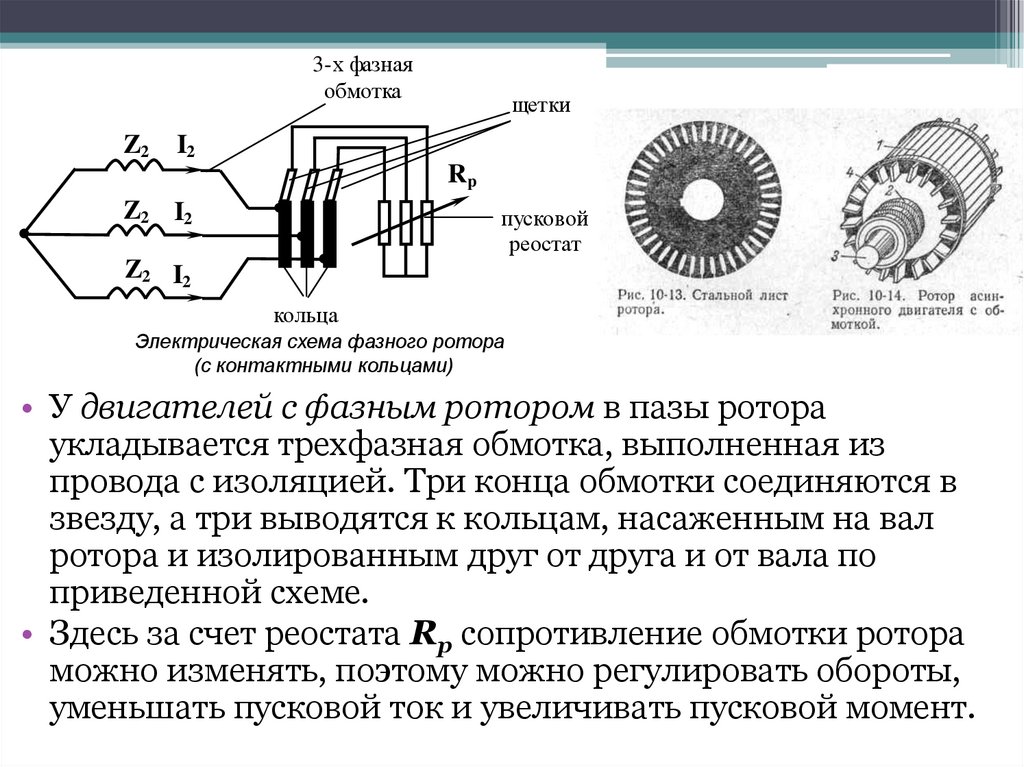 Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Если нагрузка мала, то при случайном обрыве обмотки статора при использовании такой схемы частота вращения превысит максимально допустимую и электродвигатель может пойти “вразнос”
Электродвигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет небольшое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаков. Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Регулировка оборотов электродвигателя постоянного тока с последовательно включенной обмоткой статора может производиться двумя способами:
- Подключением параллельно статору регулировочного устройства, изменяющего магнитный поток. Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
- Регулирование (снижение) оборотов с помощью уменьшения напряжения. Этот способ применяется практически во всех электрических устройствах – бытовых приборах, инструменте и т.д.
 Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.Электродвигатели коллекторные переменного тока
Эти однофазные моторы имеют меньший КПД, чем двигатели постоянного тока, но из за простоты изготовления и схем управления нашли наиболее широкое применение в бытовой технике и электроинструменте. Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе. Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Для улучшения характеристик в мощных (промышленных) коллекторных электродвигателях переменного тока применяются дополнительные полюса и компенсационные обмотки.
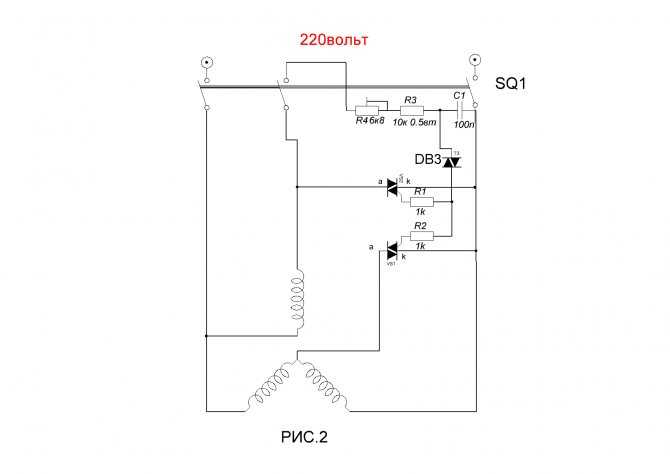 В двигателях бытовых устройств таких приспособлений нет.
В двигателях бытовых устройств таких приспособлений нет.Регуляторы оборотов электродвигателя
Схемы изменения частоты вращения электродвигателей в большинстве случаев построены на тиристорных регуляторах, ввиду своей простоты и надежности.
Принцип работы представленной схемы следующий: конденсатор С1 заряжается до напряжения пробоя динистора D1 через переменный резистор R2, динистор пробивается и открывает симистор D2, управляющий нагрузкой. Напряжение на нагрузке зависит от частоты открывания D2, зависящее в свою очередь от положения движка переменного сопротивления. Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью .
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного . Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования , мощности, эффективности использования, скорости и показателей энергосбережения.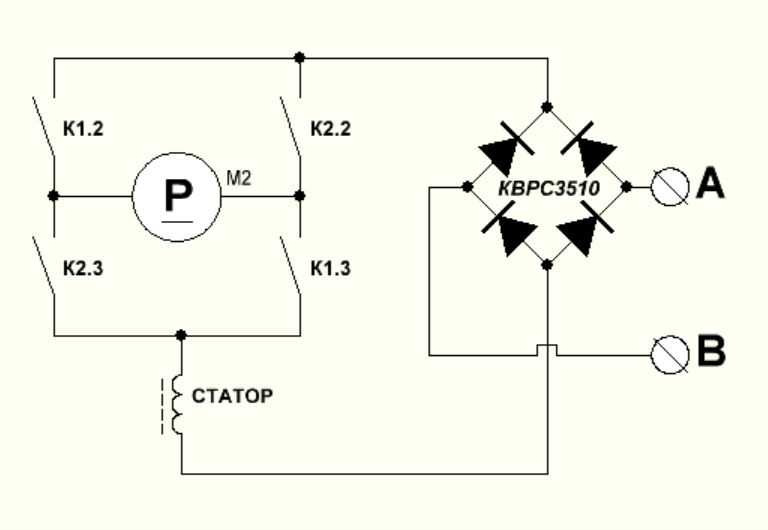
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты : выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
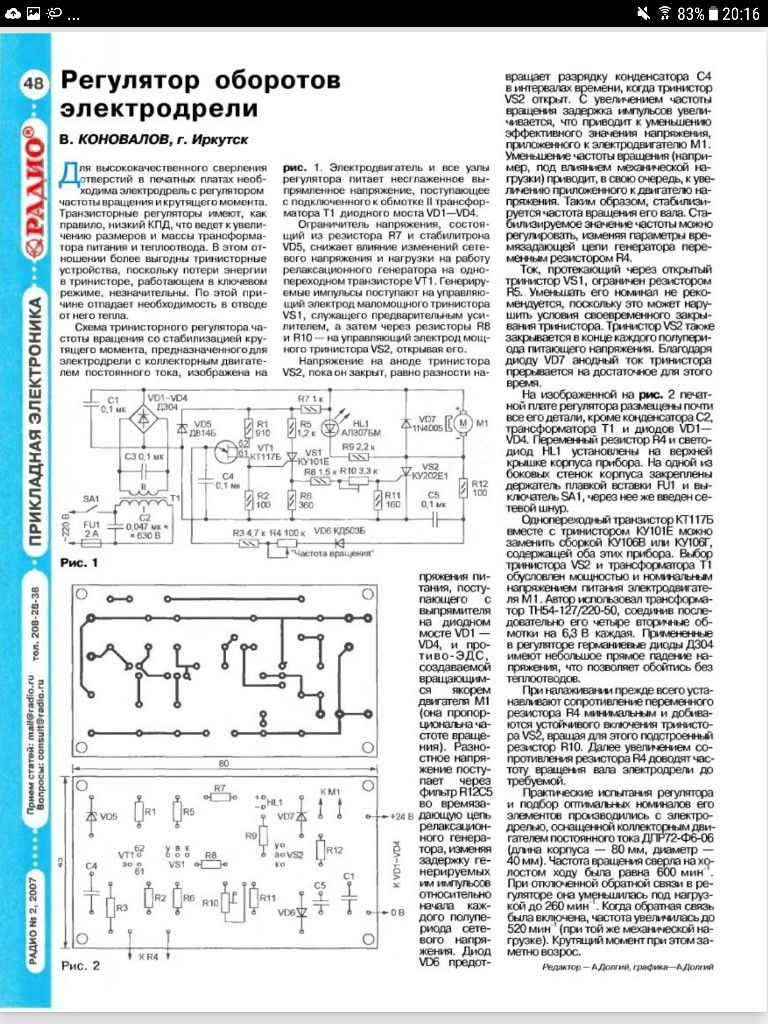 Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.
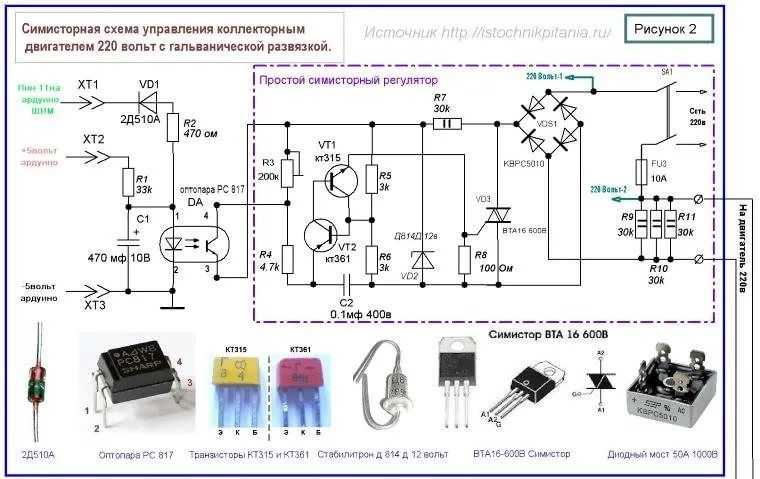
Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.

Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. в однофазную сеть 220В.
Данный регулятор оборотов электродвигателя 220в
позволяет изменять частоту либо электродвигателя, рассчитанных на работу от сети 220 вольт.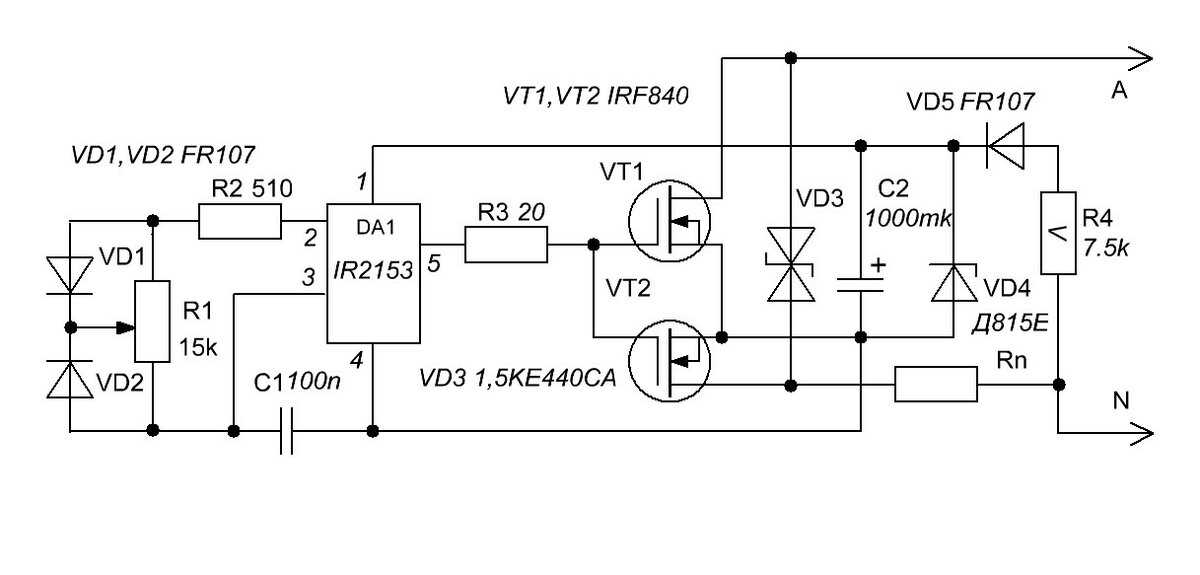
Достаточно популярным регулятором оборотов для электродвигателей на 220 вольт переменного тока является схема на тиристорах. Типовой схемой является подключение электродвигателя или вентилятора в разрыв анодной цепи тиристора.
Одно не маловажное условие при использовании подобных регуляторов, это надежный контакт во всей цепи. Что нельзя сказать про коллекторные электродвигатели, поскольку у них механизм щеток создает кратковременные обрывы электроцепи. Это существенно влияет на качество работы регулятора.
Описание работы схемы регулятора оборотов
Приведенная ниже схема
тиристорного регулятора оборотов
, как раз разработана для изменения частоты вращения коллекторных электродвигателей
(электродрель, фрезер, вентилятор
). Первое, что следует отметить, это то, что двигатель вместе с силовым тиристором VS2 подсоединен в одну из диагоналей диодного моста VD3, на другую же подается сетевое напряжение 220 вольт
.
Помимо этого, данный тиристор контролируется достаточно широкими импульсами, благодаря которым, непродолжительные отключения активной нагрузки, которыми характеризуется работа коллекторного двигателя, не влияют на устойчивую работу данной схемы.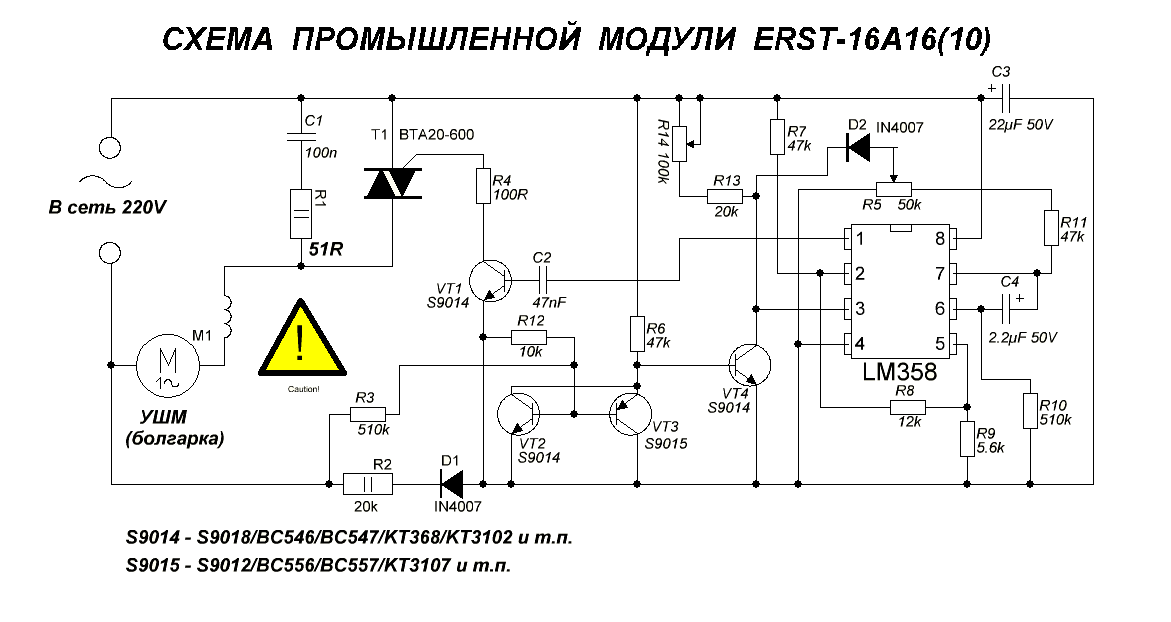
Для управления тиристором VS1 на транзисторе VT1, собран генератор импульсов. Питание данного генератор осуществляется трапециевидным напряжением, создающимся в результате ограничения положительных полуволн стабилитроном VD1 имеющих частоту 100 Гц. Конденсатор С1 разряжается через сопротивления R1, R2, R3. Резистором R1 осуществляется скорость разряда данного конденсатора.
При достижении на конденсаторе напряжения достаточного для открывания транзистора VT1, на управляющий вывод VS1 поступает положительный импульс. Тиристор открывается и теперь уже на управляющем выводе VS2 появляется длительный импульс управления. И уже с данного тиристора напряжение, которое фактически и влияет на величину оборотов, подается на двигатель.
Частоту оборотов вращения электродвигателя регулируют резистором R1. Так как в цепь VS2 подключена индуктивная нагрузка, то возможно спонтанное отпирание тиристора, даже при отсутствии управляющего сигнала. Поэтому для предотвращения данного нежелательного эффекта, в схему добавлен диод VD2 который подключается параллельно обмотке возбуждения L1 электродвигателя.
Детали регулятора оборотов вентилятора и электродвигателя
Стабилитрон – можно заменить на другой с напряжением стабилизации в районе 27 – 36В. Тиристоры VS1 – любой маломощный с прямым напряжением более 100 вольт, VS2 — возможно поставить КУ201К, КУ201Л, КУ202М. Диод VD2 – с обратным напряжением не меньше 400 вольт и прямым током более 0,3А. Конденсатор C1 – КМ-6.
Настройка регулятора оборотов
Во время наладки схемы регулятора желательно применить стробоскоп, который позволяет либо стрелочный вольтметр для переменного тока, который подсоединяют параллельно двигателю.
Вращая ручку резистора R1, определяют диапазон изменения напряжения. Путем подбора сопротивления R3 устанавливают данный диапазон в районе от 90 до 220 вольт. В том случае если при минимальных оборотах двигатель вентилятора работает неустойчиво, то необходимо немного уменьшить сопротивление R2.
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор –регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
- Область применения
- Выбираем устройство
- Устройство ПЧ
- Виды устройств
- Прибор триак
Для чего нужен частотный преобразователь оборотов
Функция регулятора в инвертировании напряжения 12, 24 вольт, обеспечение плавности пуска и остановки с использованием широтно-импульсной модуляции.
Контроллеры оборотов входят в структуру многих приборов, так как они обеспечивают точность электрического управления. Это позволяет регулировать обороты в нужную величину.
Область применения
Регулятор оборотов двигателя постоянного тока используется во многих промышленных и бытовых областях. Например:
- отопительный комплекс;
- приводы оборудования;
- сварочный аппарат;
- электрические печи;
- пылесосы;
- швейные машинки;
- стиральные машины.
Выбираем устройство
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
Устройство ПЧ
- двигатель переменного тока природный контроллер;
- привод;
- дополнительные элементы.
Схема контроллера оборотов вращения двигателя 12 в изображена на рисунке. Обороты регулируются с помощью потенциометра. Если на вход поступают импульсы с частотой 8 кГц, то напряжение питания будет 12 вольт.
Прибор может быть куплен в специализированных точках продажи, а можно сделать самому.
При пуске трехфазного двигателя на всю мощность, передаётся ток, действие повторяется около 7 раз. Сила тока сгибает обмотки двигателя, образуется тепло, на протяжении долгого времени. Преобразователь представляет собой инвертор, обеспечивающий превращение энергии. Напряжение поступает в регулятор, где происходит выпрямления 220 вольт с помощью диода, расположенного на входе. Затем происходит фильтрация тока посредством 2 конденсатора. Образуется ШИМ. Далее импульсный сигнал передаётся от обмоток двигателя к определённой синусоиде.
Существует универсальный прибор 12в для бесколлекторных двигателей.
Схема состоит из двух частей–логической и силовой. Микроконтроллер расположен на микросхеме. Эта схема характерна для мощного двигателя. Уникальность регулятора заключается в применении с различными видами двигателей. Питание схем раздельное, драйверам ключей требуется питание 12В.
Виды устройств
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Преобразователи на электронных ключах
Распространённые регулятор тиристор, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
К источнику напряжения 24 вольт. Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Процесс пропорциональных сигналов
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
Схема регулятора, с помощью которой осуществляется изменение частоту оборотов вращения двигателя или вентилятора, рассчитана на работу от сети переменного тока на напряжение 220 вольт.
Двигатель вместе с силовым тиристором VS2 подключен в диагональ диодного моста VD3, на другую же поступает сетевое напряжение переменного тока 220 вольт. Кроме того, этот тиристор осуществляет контроль достаточно широкими импульсами, благодаря чему, непродолжительные обрывы цепи, с которыми работают все коллекторные двигатели, не влияют на устойчивую работу схемы.
Управляет первым тиристором транзистор VT1, подключенный по схеме генератора импульсов. Как только напряжение на конденсаторе станет достаточным для открытия первого транзистора, на управляющий вывод тиристора поступит положительный импульс. Тиристор откроется и теперь уже на втором тиристоре появится длительный управляющий импульс. И уже с него напряжение, которое фактически и влияет на величину оборотов, поступает на двигатель.
Частоту оборотов вращения электродвигателя подстраивают переменным сопротивлением R1. Так как в цепь второго тиристора подсоединена индуктивная нагрузка, то возможно спонтанное открывание тиристора, даже в момент отсутствии управляющего сигнала. Поэтому для блокировки этого, в схему включен диод VD2 который подсоединен параллельно обмотке L1 двигателя.
Во время настройки схемы регулятора оборотов двигателя желательно использовать , которым можно измерить частоту вращения электродвигателя либо обычный стрелочный вольтметр для переменного тока, который подключают параллельно двигателю.
С помощью подбора сопротивления R3 задают диапазон изменения напряжения от 90 до 220 вольт. Если при минимальных оборотах двигатель работает некорректно, то требуется уменьшить номинал резистора R2.
Эта схема хорошо подходит для регулировки скорости вращения вентилятора в зависимости от температуры.
В роли чувствительного элемента используется . В результате его нагревания уменьшается его сопротивление, и поэтому на выходе операционного усилителя, наоборот напряжение увеличивается и через полевой транзистор управляет оборотами вентилятора.
Переменным сопротивлением P1 — можно задать наименьшую скорость вращения вентилятора при наименьшей температуре, а переменным сопротивлением P2 регулируют наибольшую скорость вращения при максимальной температуре.
В нормальных условиях настраиваем резистором P1 минимальные обороты двигателя. Затем нагревают датчик и сопротивлением P2 адают нужную частоту вращения вентилятора.
Схема управляет скоростью вентилятора в зависимости от показаний температур, с помощью обычного с отрицательным температурным коэффициентом.
Схема настолько проста, что в ней присутствует только три радиокомпонента: регулируемый стабилизатор напряжения LM317T
и два сопротивления, образующие делитель напряжения. Одно из сопротивлений — термистор с отрицательным ТКС, а другое — обычный резистор. Для упрощения сборки рисунок печатной платы привожу ниже.
В целях экономии, можно оснастить регулятором оборотов типовую болгарку. Такой регулятор для шлифования корпусов различной радиоэлектронной аппаратуры является незаменимым инструментом в арсенале радиолюбителя
Все современные дрели выпускают с встроенными в них регуляторами числа оборотов двигателя, но наверняка, в арсенале каждого радиолюбителя имеется старая советская дрель, у которых изменение числа оборотов не было задумано, что, резко снижает эксплуатационные характеристики.
Регулировать скорость вращения асинхронного безколлекторного двигателя можно с помощью настройки частоты питающего переменного напряжения. Данная схема позволяет регулировать скорость вращения в довольно широком диапазоне — от 1000 до 4000 оборотов в минуту.
Регулировка оборотов коллекторного электродвигателя 220в. Регулировка оборотов асинхронного двигателя
Не каждая современная дрель или болгарка оснащена заводским регулятором оборотов, и чаще всего регулировка оборотов не предусмотрена вовсе. Тем не менее, как болгарки, так и дрели построены на базе коллекторных двигателей, что позволяет каждому их владельцу, маломальски умеющему обращаться с паяльником, изготовить собственный регулятор оборотов из доступных электронных компонентов, хоть из отечественных, хоть из импортных.
В данной статье мы рассмотрим схему и принцип работы простейшего регулятора оборотов двигателя электроинструмента, и единственное условие — двигатель должен быть коллекторным — с характерными ламелями на роторе и щетками (которые порой искрят).
Приведенная схема содержит минимум деталей, и подойдет для электроинструмента мощностью до 1,8 кВт и выше, для дрели или болгарки. Похожая схема используется для регулировки оборотов в автоматических стиральных машинах, в которых стоят коллекторные высокоскоростные двигатели, а также в диммерах для ламп накаливания. Подобные схемы, в принципе, позволят регулировать температуру нагрева жала паяльника, электрического обогревателя на базе ТЭНов и т. д.
Потребуются следующие радиоэлектронные компоненты:
Резистор постоянный R1 — 6,8 кОм, 5 Вт.
Переменный резистор R2 — 2,2 кОм, 2 Вт.
Резистор постоянный R3 — 51 Ом, 0,125 Вт.
Конденсатор пленочный C1 — 2 мкф 400 В.
Конденсатор пленочный C2 — 0,047 мкф 400 вольт.
Диоды VD1 и VD2 — на напряжение до 400 В, на ток до 1 А.
Тиристор VT1 — на необходимый ток, на обратное напряжение не менее 400 вольт.
В основе схемы — тиристор. Тиристор представляет собой полупроводниковый элемент с тремя выводами: анод, катод, и управляющий электрод. После подачи на управляющий электрод тиристора короткого импульса положительной полярности, тиристор превращается в диод, и начинает проводить ток до тех пор, пока в его цепи этот ток не прервется или не сменит направление.
После прекращения тока или при смене его направления, тиристор закроется и перестанет проводить ток, пока не будет подан следующий короткий импульс на управляющий электрод. Ну а поскольку напряжение в бытовой сети переменное синусоидальное, то каждый период сетевой синусоиды тиристор (в составе данной схемы) станет отрабатывать строго начиная с установленного момента (в установленной фазе), и чем меньше во время каждого периода тиристор будет открыт, тем ниже будут обороты электроинструмента, а чем, соответственно, дольше тиристор будет открыт, тем выше будут обороты.
Как видите, принцип прост. Но применительно к электроинструменту с коллекторным двигателем, схема работает хитрее, и об этом мы расскажем далее.
Итак, в сеть здесь включены параллельно: измерительная цепь управления и силовая цепь. Измерительная цепь состоит из постоянного и переменного резисторов R1 и R2, из конденсатора C1, и диода VD1. Для чего нужна эта цепь? Это делитель напряжения. Напряжение с делителя, и что важно, противо-ЭДС с ротора двигателя, складываются в противофазе, и формируют импульс для открывания тиристора. Когда нагрузка постоянна, то и время открытого состояния тиристора постоянно, следовательно обороты стабилизированы и постоянны.
Как только нагрузка на инструмент, и следовательно на двигатель, увеличивается, то величина противо-ЭДС уменьшается, поскольку обороты снижаются, значит сигнал на управляющий электрод тиристора возрастает, и открывание происходит с меньшей задержкой, то есть мощность подводимая к двигателю возрастает, увеличивая упавшие обороты. Так обороты сохраняются постоянными даже под нагрузкой.
В результате совместного действия сигналов от противо-ЭДС и с резистивного делителя, нагрузка не сильно влияет на обороты, а без регулятора это влияние было бы существенным. Таким образом при помощи данной схемы достижима устойчивая регулировка оборотов в каждом положительном полупериоде сетевой синусоиды. При средних и малых скоростях вращения этот эффект более выражен.
Однако, при повышении оборотов, то есть при повышении напряжения, снимаемого с переменного резистора R2, стабильность поддержания скорости постоянной снижается.
Лучше на этот случай предусмотреть шунтирующую кнопку SA1 параллельно тиристору. Функция диодов VD1 и VD2 — обеспечение однополупериодного режима работы регулятора, так как напряжения с делителя и с ротора сравниваются лишь в отсутствие тока через двигатель.
Конденсатор C1 расширяет зону регулирования на малых скоростях, а конденсатор C2 снижает чувствительность к помехам от искрения щеток. Тиристор нужен высокочувствительный, чтобы ток менее 100 мкА смог бы его открыть.
Декор дня рождения своими руками
Закрыть… [X]
Такую коробку для вещей можно использовать на кухне, ванной или других комнатах для декора помещения своими руками.
Ковбойские остроносые сапогиПринцип работы самодельного замка заключается в следующем. В одной его половине находится постоянный магнит. а в другой — металлическая пластина. Одна из них крепится к двери. Вторая, с удаленной металлической пластиной, оснащается герконом КЭМ-1 и крепится к дверной коробке. Если дверь находится в закрытом положении, две части замка прижимаются, магнит оказывает действие на геркон, замыкая его контакты. Если же дверь открывается, магнит уходит, и контакты геркона размыкаются.
Батарея, системный блок компьютера, даже блок питания для ноутбука — это все лучшие друзья. Я уже молчу, про такие хорошие грелки, как мы с мужем.
Берите наполнитель и набивайте куклу. Когда полностью равномерно распределите набивку, зашейте изделие. Ручки необходимо пришивать к туловищу практически около самой шеи.
Из одной паллеты, отшлифованной, пропитанной и лакированной, получается садовый столик вроде журнального, слева на рис. Если в наличии есть пара, из них буквально за полчаса можно сделать настенный рабочий стол-стеллаж, в центре и справа. Цепи для него также можно сплести самому из мягкой проволоки, обтянутой трубкой из ПВХ или, лучше, термоусаживаемой. Для полного поднятия столешницы мелкий инструмент укладывают на полку настенной паллеты.
Ну а если стеклянную чашу, вазу, конфетницу, сосуд для пунша или обыкновенные бокалы наполнить водой, разбросав на дне морскую гальку, и отпустить в «свободное плавание» свечи-таблетки, получим волшебную подсветку для романтического Нового года. Для более интересного и неожиданного эффекта можно поэкспериментировать с цветом воды.Как производится установка шипов на резину?
Игрушки ручной работы для детей — это красиво, дешево и приятно. Каждый ребенок нуждается в оригинальных и обучающих игрушках, но не всегда есть возможность их приобрести. Сегодня мы покажем вам 5 примеров веселых игрушек, которые вы можете сделать самостоятельно. Они могут быть сделаны из картона, бумаги или дерева. В общем вдохновляйтесь и чаще радуйте своих детей.
Для основания такой конструкции можно использовать толстую фанеру, а для её верхней части – поликарбонат. Найти в сети солнечные батареи сегодня тоже не проблема.
Внимание! При стыковке панелей не стоит прилагать слишком большие усилия, вы можете повредить место стыка.
Именно столько ножей должно быть у хозяйки на кухне, чтобы процесс приготовления пищи всегда был простым и приятным.
Для изготовления кормушки своими руками нам потребуется:
Расчет древесины. Доски, носящие название клепки, имеют двояковыпуклые стороны для придания бондарному изделию выпуклости. Чтобы их сделать такими, нужно взять нижнюю часть ствола дерева и расколоть подобием рубки дров. Если его аккуратно пилить, то нарушится природная целостность волокон, что плохо для такого изделия. Сразу приступать к фигурному выпиливанию не стоит – поленья нужно просушить в течение 2 месяцев. Причем сушить не под палящим солнцем, а в темном прохладном помещении.
Как плести браслеты из шнурков
Тот факт, что большинство новогодних костюмов для детей дошкольного возраста легко шьются на основе комбинезона, может значительно сузить и облегчить творческий поиск. Если научится шить комбинезон — основу для новогоднего костюма и придумать (почерпнуть), смастерить своими руками декоративные элементы к нему, то можно сделать удивительные и довольно интересные модели новогодних нарядов для детей. Главное заранее все продумать до мелочей, вооружится знаниями по теме — чтобы результат труда приятно удивил и порадовал всех.
Проектирование шкафа-купе
Картинки
Подарок маме на день рождения своими руками фото инструкция
Похожие новости
.
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью .
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного . Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования , мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты : выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.
Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.
Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. в однофазную сеть 220В.
Данный регулятор оборотов электродвигателя 220в
позволяет изменять частоту либо электродвигателя, рассчитанных на работу от сети 220 вольт.
Достаточно популярным регулятором оборотов для электродвигателей на 220 вольт переменного тока является схема на тиристорах. Типовой схемой является подключение электродвигателя или вентилятора в разрыв анодной цепи тиристора.
Одно не маловажное условие при использовании подобных регуляторов, это надежный контакт во всей цепи. Что нельзя сказать про коллекторные электродвигатели, поскольку у них механизм щеток создает кратковременные обрывы электроцепи. Это существенно влияет на качество работы регулятора.
Описание работы схемы регулятора оборотов
Приведенная ниже схема
тиристорного регулятора оборотов
, как раз разработана для изменения частоты вращения коллекторных электродвигателей
(электродрель, фрезер, вентилятор
). Первое, что следует отметить, это то, что двигатель вместе с силовым тиристором VS2 подсоединен в одну из диагоналей диодного моста VD3, на другую же подается сетевое напряжение 220 вольт
.
Помимо этого, данный тиристор контролируется достаточно широкими импульсами, благодаря которым, непродолжительные отключения активной нагрузки, которыми характеризуется работа коллекторного двигателя, не влияют на устойчивую работу данной схемы.
Для управления тиристором VS1 на транзисторе VT1, собран генератор импульсов. Питание данного генератор осуществляется трапециевидным напряжением, создающимся в результате ограничения положительных полуволн стабилитроном VD1 имеющих частоту 100 Гц. Конденсатор С1 разряжается через сопротивления R1, R2, R3. Резистором R1 осуществляется скорость разряда данного конденсатора.
При достижении на конденсаторе напряжения достаточного для открывания транзистора VT1, на управляющий вывод VS1 поступает положительный импульс. Тиристор открывается и теперь уже на управляющем выводе VS2 появляется длительный импульс управления. И уже с данного тиристора напряжение, которое фактически и влияет на величину оборотов, подается на двигатель.
Частоту оборотов вращения электродвигателя регулируют резистором R1. Так как в цепь VS2 подключена индуктивная нагрузка, то возможно спонтанное отпирание тиристора, даже при отсутствии управляющего сигнала. Поэтому для предотвращения данного нежелательного эффекта, в схему добавлен диод VD2 который подключается параллельно обмотке возбуждения L1 электродвигателя.
Детали регулятора оборотов вентилятора и электродвигателя
Стабилитрон – можно заменить на другой с напряжением стабилизации в районе 27 – 36В. Тиристоры VS1 – любой маломощный с прямым напряжением более 100 вольт, VS2 — возможно поставить КУ201К, КУ201Л, КУ202М. Диод VD2 – с обратным напряжением не меньше 400 вольт и прямым током более 0,3А. Конденсатор C1 – КМ-6.
Настройка регулятора оборотов
Во время наладки схемы регулятора желательно применить стробоскоп, который позволяет либо стрелочный вольтметр для переменного тока, который подсоединяют параллельно двигателю.
Вращая ручку резистора R1, определяют диапазон изменения напряжения. Путем подбора сопротивления R3 устанавливают данный диапазон в районе от 90 до 220 вольт. В том случае если при минимальных оборотах двигатель вентилятора работает неустойчиво, то необходимо немного уменьшить сопротивление R2.
Это устройство, предназначенное для выполнения функции плавного увеличения или уменьшения скорости вращения вала электрического двигателя. Регулировку можно осуществлять методом широтно-импульсной модуляции и методом изменения фазного напряжения.
Использование широтно-импульсной модуляции
Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа, можно использовать импульсный регулятор-стабилизатор напряжения (инвертор). Он будет выполнять функцию источника питания. В его основу положено применение импульсного ШИМ-регулятора марки ТL494. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
На рисунке выше изображена схема использования ШИМ-регулятора для трехфазного асинхронного двигателя, подключенного через конденсатор к однофазной сети.
Этот способ, несмотря на свою эффективность, имеет два существенных недостатка – это:
- невозможность реверсивного управления двигателем без использования дополнительных коммутирующих аппаратов;
- частотные преобразователи , использованные в регуляторе, отличаются высокой стоимостью и выпускаются ограниченным числом производителей.
Блок управления и регулирования скорости вращения электродвигателей изменением фазного напряжения
Существует несколько видов блоков управления, изготовленных промышленным способом. Они используются для однофазных асинхронных двигателей, границы регулирования составляют от 25 до 100% от значения мощности, и от 1000 до 4000 об/мин. Это устройства с маркировкой РВС207, РВ600/900.
Работа блока регулировки происходит при изменении средней величины переменного напряжения на электродвигателе. Она производится с помощью метода фазового регулирования напряжения, при изменении угла открытия полупроводниковых приборов (тиристоров, симисторов и т. д.), при использовании которых осуществлена сборка схемы.
Управление блоком осуществляется посредством использования внешнего переменного резистора. В том случае, когда мощность менее 25%, двигатель отключается и переходит в дежурный режим ожидания.
Контроль за работой осуществляется при помощи светового индикатора. Отключенное состояние двигателя – изредка мигает красный цвет. Двигатель работает – скважность включения индикатора пропорциональна оборотам вращения (производительности) двигателя.
На рисунке схема подключения блока регулятора РВС 207.
Регулятор скорости асинхронного двигателя
Помимо образцов регуляторов, промышленных образцов регуляторов, существует возможность самостоятельного выполнения регуляторов скорости бесколлекторных двигателей, не уступающих промышленным образцам. За основу схемы берется пример регулятора промышленного производства, ее можно собрать своими силами.
На рисунке выше электрическая схема регулятора скорости вращения бесколлекторного двигателя.
Регулировать количество оборотов вращения вала бесколлекторного асинхронного электродвигателя допускается также при изменении значения переменного напряжения, подаваемого к двигателю.
В состав регулятора входит задающий генератор, он служит для изменения частоты в границах значений 50 – 200 Гц. Генератор состоит из мультивибратора, работа которого строится на микросхеме К561ЛА7 и счетчика-дешифратора марки К561ИЕ8 с коэффициентом пересчета – 8, она отвечает за формирование сигналов управления силовыми полевыми транзисторами полумоста.
В схеме присутствует выходной трансформатор Т-1. Он служит для развязки транзисторов полумоста.
Выпрямитель включает в свою конструкцию диодный мост и удваивающие напряжение питания – конденсаторы с большой емкостью.
Диодный мост подключен по нетрадиционной схеме. С4 и R7 выполняют роль демпфирующей цепи, она служит для сглаживания всплесков напряжения, которые представляют собой опасность для транзисторов VТ4.
Рекомендация
: для трансформатора управления транзисторными ключами, можно применить трансформатор от телевизионного блока питания. В этом случае, тип не играет большого значения, главное, чтобы первичная обмотка состояла из 120 витков провода 0,7 мм2, вторичная представляет собой 2 независимые друг от друга обмотки с количеством витков – 60, провод, применяемый во вторичной обмотке, аналогичен проводу первичной. Первичная обмотка имеет напряжение 2 х 12 В, вторичная обмотка – по 12 В каждая.
Необходимо помнить, что обе вторичные обмотки должны обладать хорошей изоляцией друг от друга, между обмотками присутствует высокий потенциал, он составляет 640 В, они подключаются к затворам транзисторных ключей в противофазе.
Такой регулятор может управлять вращением асинхронного двигателя с максимальным значением рабочей мощности – 500 Вт. Чтобы регулятор использовать для регулировки электродвигателей более высокой мощности, нужно применить большее количество силовых ключей, а также изменить в сторону увеличения емкость конденсаторов для питающего фильтра, это элементы схемы С3 и С4. Для регулятора достаточно использовать печатную плату размером 110 х 80 мм. Управляющий силовыми транзисторными ключами трансформатор монтируется отдельно от блока регулятора.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на , буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Методы управления скоростью асинхронного двигателя
Асинхронный двигатель практически является двигателем с постоянной скоростью, это означает, что для всего диапазона нагрузки изменение скорости двигателя довольно мало. Скорость шунтирующего двигателя постоянного тока можно очень легко изменять с хорошим КПД, но в случае асинхронных двигателей снижение скорости сопровождается соответствующей потерей эффективности и плохим коэффициентом мощности. Поскольку асинхронные двигатели широко используются, их регулирование скорости может потребоваться во многих приложениях. Ниже описаны различные методы управления скоростью асинхронного двигателя .
Регулятор скорости асинхронного двигателя со стороны статора
1. Изменением приложенного напряжения:
Из уравнения крутящего момента асинхронного двигателя,
Сопротивление ротора R 2 постоянно и если скольжение s мало, то (sX 2 ) 2 настолько мало, что им можно пренебречь. Следовательно, T ∝ sE 2 2 , где E 2 — ЭДС ротора, а E 2 ∝ В
Таким образом, T ∝ sV 2 , а значит, при уменьшении подаваемого напряжения развиваемый момент уменьшается. Следовательно, для обеспечения одного и того же момента нагрузки скольжение увеличивается с уменьшением напряжения и, следовательно, скорость уменьшается. Этот метод является самым простым и дешевым, но до сих пор применяется редко, т. к. для относительно небольшого изменения скорости требуется большое изменение напряжения питания.
2. При изменении приложенной частоты
Синхронная скорость вращающегося магнитного поля асинхронного двигателя определяется выражением
где, f = частота питания и P = количество полюсов статора.
Следовательно, синхронная скорость изменяется при изменении частоты питания. Фактическая скорость асинхронного двигателя определяется как N = Ns (1 — s) . Однако этот метод не получил широкого распространения. Его можно использовать там, где асинхронный двигатель питается от специального генератора (так что частоту можно легко изменять, изменяя скорость первичного двигателя). Кроме того, при более низкой частоте ток двигателя может стать слишком большим из-за уменьшения реактивного сопротивления. И если частота увеличивается сверх номинального значения, максимальный развиваемый крутящий момент падает, а скорость увеличивается.
3. Постоянная V/F-регулировка асинхронного двигателя
Это наиболее популярный метод управления скоростью асинхронного двигателя. Как и в описанном выше методе, если частота питания снижается при сохранении номинального напряжения питания, поток в воздушном зазоре будет стремиться к насыщению. Это вызовет чрезмерный ток статора и искажение волны потока статора. Следовательно, напряжение статора также должно быть уменьшено пропорционально частоте, чтобы поддерживать постоянный поток в воздушном зазоре. Величина потока статора пропорциональна соотношению напряжения статора и частоты. Следовательно, если отношение напряжения к частоте поддерживается постоянным, поток остается постоянным. Кроме того, при сохранении постоянной V/F развиваемый крутящий момент остается приблизительно постоянным. Этот метод дает более высокую эффективность во время выполнения. Поэтому в большинстве приводов переменного тока для управления скоростью используется метод постоянного напряжения/частоты (или метод переменного напряжения и переменной частоты). Наряду с широким диапазоном регулирования скорости этот метод также предлагает возможность «мягкого пуска».
4. Изменение количества полюсов статора
Из приведенного выше уравнения синхронной скорости видно, что синхронную скорость (и, следовательно, рабочую скорость) можно изменить, изменив количество полюсов статора. Этот метод обычно используется для асинхронных двигателей с короткозамкнутым ротором, поскольку ротор с короткозамкнутым ротором адаптируется к любому количеству полюсов статора. Смена полюсов статора достигается за счет наматывания двух или более независимых статорных обмоток на разное число полюсов в одних и тех же пазах.
Например, статор намотан двумя трехфазными обмотками, одна на 4 полюса, а другая на 6 полюсов.
для частоты питания 50 Гц
i) синхронная скорость при подключении 4-полюсной обмотки, Ns = 120*50/4 = 1500 об/мин
ii) синхронная скорость при подключении 6-полюсной обмотки, Ns = 120*50/6 = 1000 об/мин
Регулятор скорости со стороны ротора:
1. Управление реостатом ротора
Этот метод подобен способу управления якорным реостатом шунтового двигателя постоянного тока. Но этот метод применим только к двигателям с контактными кольцами, так как добавление внешнего сопротивления в ротор двигателей с короткозамкнутым ротором невозможно.
2. Каскадный режим
В этом методе управления скоростью используются два двигателя. Оба установлены на одном валу, поэтому оба работают с одинаковой скоростью. Один двигатель питается от трехфазного источника питания, а другой двигатель питается от ЭДС индукции в первом двигателе через токосъемные кольца. Расположение показано на следующем рисунке.
Двигатель А называется основным, а двигатель В — вспомогательным.
Пусть, N с1 = частота двигателя A
N с2 = частота двигателя B
P 1 = количество полюсов статора двигателя A
P 2 = количество полюсов статора двигателя B
N = скорость установки и одинаковая для обоих двигателей
Теперь f = частота питания 9008 двигателя A, S 1 = (N с1 — N) / N с1 .
частота ЭДС ротора в двигателе А, f 1 = S 1 f
Теперь на вспомогательный двигатель B подается ЭДС ротора
поэтому, N s2 = (120f 1 ) / P 2 = (120S 1 f) / P 2 .
Теперь введите значение S 1 = (N s1 — N) / N s1
На холостом ходу скорость вспомогательного ротора почти равна его синхронной скорости.
т.е. N = N s2 .
из приведенных выше уравнений можно получить, что
С помощью этого метода можно получить четыре различных скорости
1. когда работает только двигатель А, соответствующая скорость = .Ns1 = 120f / P 1
2. когда работает только двигатель B, соответствующая скорость = Ns2 = 120f / P 2
3. если выполняется накопительное каскадирование, скорость установки = N = 120f / (P 1 + P 2 )
4. если выполнено дифференциальное каскадирование, скорость установки = N = 120f (P 1 — P 2 )
3. Вводом ЭДС в цепь ротора
В этом методе скорость асинхронного двигателя регулируется путем подачи напряжения в цепь ротора. Необходимо, чтобы подаваемое напряжение (ЭДС) имело ту же частоту, что и частота скольжения. Однако ограничений на фазу инжектируемой ЭДС нет. Если мы введем ЭДС, которая находится в противофазе с ЭДС, индуцированной ротором, сопротивление ротора будет увеличено. Если мы введем ЭДС, которая находится в фазе с ЭДС, индуцированной ротором, сопротивление ротора уменьшится. Таким образом, изменяя фазу инжектируемой ЭДС, можно управлять скоростью. Основное преимущество этого метода заключается в том, что может быть достигнут широкий диапазон регулирования скорости (как выше нормы, так и ниже нормы). ЭДС может вводиться различными методами, такими как система Крамера, система Шербиуса и т. д.
ЧРП или симистор для асинхронных двигателей переменного тока?
Когда на асинхронный двигатель переменного тока подается напряжение, он работает с определенной скоростью. Требования к переменной скорости для асинхронных двигателей переменного тока обычно выполняются с помощью трехфазного двигателя и инвертора или частотно-регулируемого привода. Этот пост в блоге также представляет еще один вариант.
Во-первых, давайте поговорим о наиболее распространенном методе управления скоростью асинхронных двигателей переменного тока, которым является инвертор или частотно-регулируемый привод (ЧРП). Я больше всего знаком с серией Fuji Electric FRENIC Mini C2.
ЧРП Fuji Electric FRENIC Mini серии C2
Как это устройство управляет скоростью двигателя переменного тока? Давайте сначала поймем, почему двигатель будет работать с определенной скоростью. С математической точки зрения синхронная скорость двигателя рассчитывается по формуле:
Большинство промышленных асинхронных двигателей переменного тока являются 4-полюсными, поэтому скорость двигателя синхронизируется с частотой входного питания (Гц). При частоте 60 Гц двигатель будет работать со скоростью 1800 об/мин.
Преобразователь частоты управляет скоростью двигателя с помощью ШИМ (широтно-импульсной модуляции) для изменения частоты источника питания, подаваемого на двигатель. Обычно от двигателя не поступает обратной связи; хотя некоторые приводы используют обратную ЭДС в качестве обратной связи.
Вот блок-схема логики управления частотно-регулируемым приводом FRENIC Mini C2 (из руководства). Обратите внимание на его сложность только из-за огромного количества компонентов. Такие функции, как динамическое увеличение крутящего момента или управление компенсацией скольжения, обычно предлагаются для повышения производительности.
Один из недостатков использования частотно-регулируемых приводов заключается в том, что они могут стать дорогими и сложными для измерения. Также требуется 3-фазный асинхронный двигатель переменного тока с номинальным режимом работы инвертора или, по крайней мере, с режимом непрерывного режима работы. Если двигатель оснащен тормозным механизмом, он обычно снижает рабочий цикл. Раньше я видел на рынке частотно-регулируемые приводы для однофазных двигателей, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Другой способ управления скоростью однофазных асинхронных двигателей переменного тока?
Теперь рассмотрим еще один метод управления скоростью. Взгляните на кривую скорости крутящего момента однофазного асинхронного двигателя переменного тока, которая описывает, что двигатель будет делать после включения. Двигатель запустится со скоростью 0 об/мин, затем разгонится до номинальной скорости. Обратите внимание, как входное напряжение влияет на форму кривой скорости-крутящего момента. Если момент нагрузки остается прежним, а входное напряжение уменьшается со 100 В до 90 В, скорость двигателя уменьшается. Да, можно использовать напряжение для управления скоростью двигателя переменного тока .
ПРИМЕЧАНИЕ. Максимальная скорость составляет ~1500 об/мин, поскольку входная мощность составляет 50 Гц. Для двигателей с частотой 60 Гц 1500 об/мин будут равны 1800 об/мин.
Тем не менее, вы можете видеть, что скорость не сильно снижается при падении напряжения на 10В. Если напряжение уменьшится слишком сильно, двигатель может работать в нестабильной области (менее ~ 1000 об/мин) и, возможно, заглохнуть. В идеале вы действительно хотите, чтобы двигатель работал на оптимальной номинальной скорости для наилучшей и наиболее эффективной работы. Этот метод управления скоростью очень похож на метод управления скоростью щеточных двигателей постоянного тока. Однако диапазон оборотов регулирования скорости намного шире для коллекторных двигателей постоянного тока.
Чтобы этот метод управления был успешным, необходимо устройство обратной связи для замыкания контура между двигателем и регулятором скорости. Эта обратная связь необходима для предотвращения слишком сильных колебаний скорости двигателя (и входного напряжения).
Компания Oriental Motor использует тахогенераторы для замыкания контура между нашими двигателями с регулируемой скоростью переменного тока и регуляторами скорости, такими как серия DSC или серия US2. Тахогенератор, он же тахометр, генерирует напряжение, пропорциональное скорости. Он используется в непрерывном контуре обратной связи, чтобы поддерживать точность скорости на уровне ±1% или меньше.
Это упрощенная схема цепи управления для серии DSC.
Для всех, кто заинтересован, это схема цепи управления с более подробной информацией. Вы можете видеть, что мы используем симистор для управления напряжением. Мы также используем однополупериодный выпрямитель.
Здесь показано, как тахогенератор используется во время работы двигателя.
Поскольку схема управления намного проще, чем у ЧРП, двигатели переменного тока с регулированием скорости являются более экономичным вариантом по сравнению с двигателями переменного тока с ЧРП. Метод управления фазой также демонстрирует меньший электрический шум по сравнению с двигателями с частотно-регулируемым приводом, где частотно-регулируемый привод переключается с гораздо большей скоростью.
Еще одним преимуществом серии DSC является вертикальная работа. В прошлом двигатели с тахогенератором были проблемой для вертикального перемещения. Причина в гравитации.
В этом примере двигатель перемещает груз вниз по ленточному конвейеру. Когда груз опускается, сила тяжести будет тянуть груз вниз и увеличивать его скорость. С увеличением скорости увеличивается напряжение тахогенератора. Это заставляет контроллер скорости думать, что двигатель вращается слишком быстро, таким образом снижая его напряжение, чтобы попытаться снизить скорость. Однако при снижении напряжения двигатель теряет крутящий момент. Этот процесс повторяется до тех пор, пока крутящий момент двигателя не будет исчерпан и нагрузка не упадет. В серии DSC функция остановки при замедлении обеспечивает управляемое замедление с автоматическим электромагнитным торможением. |
Недостатком двигателей переменного тока с регулированием скорости с тахогенераторной обратной связью является то, что на низких скоростях двигатель имеет определенные ограничения по крутящему моменту. Кривая крутящего момента двигателя помечена, чтобы показать это. Убедитесь, что вы работаете ниже «линии безопасной работы». Типы комбинаций (мотор-редукторы) см. пунктирную линию «Допустимый крутящий момент для комбинированного типа».
Другими словами, чтобы избежать этой проблемы, используйте мотор-редуктор.
Чтобы узнать больше о серии DSC или методе управления скоростью, ознакомьтесь с информационным документом.
Подпишитесь в правом верхнем углу страницы!
| Есть ли другая альтернатива? | ||||||
Если требуется работа при более низкой температуре, более высокая энергоэффективность, лучшее регулирование скорости, постоянный выходной крутящий момент или более широкий диапазон скоростей, идеальны. Для таких применений, как двухленточные конвейеры, машины для полировки/удаления заусенцев или машины для перемешивания, слишком большие колебания скорости из-за нагрузки могут повлиять на конечный продукт. Если постоянный крутящий момент и регулировка скорости имеют решающее значение, а системы серводвигателей выходят за рамки бюджета, стоит рассмотреть бесщеточные двигатели.
Нажмите ниже, чтобы сравнить 3 доступные технологии управления скоростью. |
Управление скоростью трехфазного асинхронного двигателя
Синхронная скорость
Где f = частота, а P число полюсов
Скорость асинхронного двигателя определяется выражением
Где
N скорость ротора асинхронного двигателя
N s — синхронная скорость,
S — скольжение.
Крутящий момент, создаваемый трехфазным асинхронным двигателем, определяется как
Когда ротор находится в состоянии покоя, скольжение s равно единице.
Итак, уравнение крутящего момента:
Где, 4 — реактивное сопротивление ротора Скорость асинхронного двигателя изменяется как со стороны статора, так и со стороны ротора. Управление скоростью трехфазного асинхронного двигателя со стороны статора дополнительно классифицируется как: Регуляторы скорости трехфазного асинхронного двигателя со стороны ротора дополнительно классифицируются как: Всякий раз, когда трехфазное питание подается на трехфазный асинхронный двигатель, создается вращающееся магнитное поле, которое вращается с синхронной скоростью, заданной В трехфазном асинхронном двигателе ЭДС индуцируется индукцией аналогично трансформатору, который определяется как , где K — постоянная обмотки, T — количество витков на фазу, а f — частота. Теперь, если мы изменим частоту, синхронная скорость изменится, но с уменьшением частоты поток будет увеличиваться, и это изменение значения потока вызовет насыщение сердечников ротора и статора, что в дальнейшем приведет к увеличению тока холостого хода двигателя. Крутящий момент, создаваемый трехфазным асинхронным двигателем, определяется как В области малого скольжения (sX) 2 очень мал по сравнению с R 2 . Так что можно пренебречь. Таким образом, крутящий момент становится равным . Поскольку сопротивление ротора R 2 постоянно, уравнение крутящего момента сводится к . Полюса статора можно изменить двумя способами В этом методе управления скоростью трехфазного асинхронного двигателя мы предусматриваем две отдельные обмотки статора. В этом методе управления скоростью трехфазного асинхронного двигателя исходная синусоидальная МДС-волна модулируется другой синусоидальной МДС-волной, имеющей другое число полюсов. Пусть f 1 (θ) — исходная МДС волны асинхронного двигателя, скорость которого необходимо регулировать. После модуляции результирующая волна МДС Таким образом, мы получаем результирующую волну МДС Следовательно, результирующая волна МДС будет иметь два разных количества полюсов Следовательно, изменяя количество полюсов, мы можем легко изменить скорость трехфазного асинхронного двигателя . В этом методе управления скоростью трехфазного асинхронного двигателя реостат добавляется в цепь статора из-за того, что это напряжение падает. св 2 2 . Если мы уменьшим напряжение питания, крутящий момент также уменьшится. Но для обеспечения той же нагрузки крутящий момент должен оставаться прежним, и это возможно только в том случае, если мы увеличим скольжение, и если двигатель с увеличением скольжения будет работать на пониженной скорости. В этом методе управления скоростью трехфазного асинхронного двигателя внешние сопротивления добавляются со стороны ротора. Трехфазный асинхронный двигатель работает в области малого скольжения. В области малого скольжения член (sX) 2 становится очень малым по сравнению с R 2 . Так что можно пренебречь. а также E 2 является константой. Таким образом, уравнение крутящего момента после упрощения принимает следующий вид: Теперь, если мы увеличим сопротивление ротора, крутящий момент R 2 уменьшится, но для обеспечения того же момента нагрузки он должен оставаться постоянным. Таким образом, мы увеличиваем скольжение, что в дальнейшем приведет к уменьшению скорости вращения ротора. Таким образом, добавляя дополнительное сопротивление в цепь ротора, мы можем уменьшить скорость трехфазного асинхронного двигателя. Основное преимущество этого метода заключается в том, что при добавлении внешнего сопротивления увеличивается пусковой момент, но этот метод управления скоростью трехфазного асинхронного двигателя также имеет некоторые недостатки: В этом методе управления скоростью трехфазного асинхронного двигателя два трехфазных асинхронных двигателя соединены на общем валу и поэтому называются каскадным двигателем. Один двигатель называется основным двигателем, а другой двигатель называется вспомогательным двигателем. Трехфазное питание подается на статор основного двигателя, в то время как вспомогательный двигатель получает питание с частотой скольжения от контактного кольца основного двигателя. Вспомогательный двигатель питается от той же частоты, что и основной двигатель, т.е. Теперь введите значение Теперь без нагрузки скорость вспомогательного ротора почти равна его синхронной скорости, т.е. N = N S2 Теперь измените приведенное выше уравнение и найдите значение N, мы получим Этот каскадный набор из двух двигателей теперь будет работать с новой скоростью, имеющей количество полюсов (P 1 + P 2 ). В приведенном выше методе крутящий момент, создаваемый основным и вспомогательным двигателем, будет действовать в одном направлении, что приводит к количеству полюсов (P 1 + P 2 ). Когда управление скоростью трехфазного асинхронного двигателя осуществляется путем добавления сопротивления в цепь ротора, некоторая часть мощности, называемая мощностью скольжения, теряется в виде потерь I 2 R. Хотите учиться быстрее? 🎓 Каждую неделю получайте электротехнические товары на свой почтовый ящик. О Electrical4U Electrical4U посвящен обучению и распространению всего, что связано с электротехникой и электроникой. … Штанга DN | 13 декабря 2004 г. Смотреть этот веб-семинар Каждый день инженеры разрабатывают продукты, в которых используются однофазные асинхронные двигатели. Управление скоростью однофазных асинхронных двигателей желательно в большинстве приложений управления двигателем, поскольку оно не только обеспечивает переменную скорость, но также снижает потребление энергии и звуковой шум. Большинство однофазных асинхронных двигателей являются однонаправленными, что означает, что они предназначены для вращения в одном направлении. Двигатели с постоянными раздельными конденсаторами (PSC) являются наиболее популярным типом однофазных асинхронных двигателей. В этой статье обсуждаются различные методы и топологии привода для управления скоростью двигателя PSC в одном и двух направлениях. Микроконтроллер — это мозг системы. Часто контроллеры, используемые для приложений управления двигателем, имеют специализированные периферийные устройства, такие как ШИМ управления двигателем, высокоскоростные аналого-цифровые преобразователи (АЦП) и диагностические выводы. Эти функции встроены в PIC18F2431 и dsPIC30F2010 от Microchip. Наличие доступа к специализированным встроенным периферийным устройствам микроконтроллера упрощает реализацию алгоритмов управления. Каналы АЦП используются для измерения тока двигателя, температуры двигателя и температуры радиатора (подключены к переключателям питания). Третий канал АЦП используется для считывания уровней потенциометра, который затем используется для установки скорости двигателя. В конечном приложении можно использовать дополнительные каналы АЦП для считывания данных с различных датчиков, таких как бесконтактный переключатель, датчики мутности, уровня воды, температуры морозильной камеры и т. д. Входы и выходы общего назначения (I/O) могут использоваться для сопряжения переключатели и дисплеи в приложении. Например, в холодильнике эти входы/выходы общего назначения могут использоваться для управления ЖК-дисплеем, семисегментным светодиодным дисплеем, кнопочным интерфейсом и т. д. Каналы связи, такие как I2C (TM) или SPI (TM) используются для соединения платы управления двигателем с другой платой для обмена данными. Интерфейсы неисправности и диагностики включают входные линии со специальными функциями, такими как возможность отключения ШИМ в случае катастрофических сбоев в системе. Например, в посудомоечной машине, если привод заблокирован из-за накопленных отходов, это может помешать вращению двигателя. Эта блокировка может быть обнаружена в виде перегрузки по току в системе управления двигателем. Используя функции диагностики, эти типы неисправностей могут быть зарегистрированы и/или отображены, или переданы на ПК специалиста по устранению неисправностей. Часто это предотвращает серьезные сбои и сокращает время простоя продукта, что приводит к снижению затрат на обслуживание. ШИМ являются основными периферийными устройствами, используемыми для управления двигателем. Используя вышеуказанные входные данные, алгоритм управления двигателем микроконтроллера определяет рабочий цикл ШИМ и шаблон выходного сигнала. Управление VF в одном направлении делает топологию привода и алгоритм управления относительно простыми. Задача состоит в том, чтобы генерировать источник питания с переменным напряжением и частотой из источника питания с фиксированным напряжением и частотой (например, от настенной розетки). На рисунке на стр. 85 показана блок-схема этой топологии привода с тремя основными секциями построения, которые обсуждались ранее. Обмотки двигателя подключены к центру каждого полумоста на выходной секции инвертора. Многие двигатели, имеющиеся в наличии, имеют как основную, так и пусковую обмотки, соединенные вместе с конденсатором, включенным последовательно с пусковой обмоткой. При такой конфигурации двигатель может иметь только два выступающих провода (М1 и М2). MCU, показанный на блок-схеме, имеет модуль ШИМ управления питанием (PCPWM), который способен выводить до трех пар ШИМ с мертвой зоной между парами. Зона нечувствительности важна в приложении управления асинхронным двигателем, чтобы избежать перекрестной проводимости шины постоянного тока через силовые ключи, когда один отключается, а другой включается. Цепь диагностики может включать контроль тока двигателя, контроль напряжения на шине постоянного тока и контроль температуры радиатора, подключенного к силовым выключателям и двигателю. Большинство двигателей PSC предназначены для работы в одном направлении. Однако во многих приложениях требуется двунаправленное вращение двигателя. Исторически для достижения двунаправленного вращения использовались зубчатые механизмы или внешние реле и переключатели. Когда используются механические передачи, вал двигателя вращается в одном направлении, а шестерни для переднего и заднего хода включаются и расцепляются в соответствии с требуемым направлением. С помощью реле и переключателей полярность пусковой обмотки электрически меняется на противоположную в зависимости от требуемого направления. К сожалению, все эти компоненты увеличивают стоимость системы для базового управления включением и выключением в двух направлениях. В этом разделе мы обсудим два метода двунаправленного управления скоростью двигателей PSC с использованием привода на базе микроконтроллера. Обсуждаемые здесь топологии привода создают эффективные напряжения, которые управляют основной обмоткой и пусковой обмоткой со сдвигом фаз друг к другу на 90 градусов. В этом методе используется удвоитель напряжения на входе; на выходе используется Н-мост или двухфазный инвертор (см. рисунок выше). К каждому полумосту подключены по одному концу основной и пусковой обмоток; другие концы соединены вместе в нейтральной точке источника питания переменного тока, которая также служит центральной точкой для удвоителя напряжения. Для схемы управления требуется четыре ШИМ с двумя комплементарными парами и достаточной зоной нечувствительности между комплементарными выходами. PWM0-PWM1 и PWM2-PWM3 — пары ШИМ с зоной нечувствительности. С помощью ШИМ шина постоянного тока синтезируется для обеспечения двух синусоидальных напряжений на 90 градусов не по фазе с разной амплитудой и разной частотой в соответствии с профилем VF. Если напряжение, подаваемое на основную обмотку, отстает от пусковой обмотки на 90 градусов, то двигатель работает в прямом направлении. Этот метод инвертора H-моста для управления двигателем типа PSC имеет следующие недостатки. Основная и пусковая обмотки имеют разные электрические характеристики. Таким образом, ток, протекающий через каждый ключ, несимметричен. Это может привести к преждевременному выходу из строя коммутационных аппаратов в инверторе. Общая точка обмоток напрямую подключена к источнику питания нейтрали. Это может увеличить количество сигналов переключения, проникающих в основной источник питания, и может увеличить шум, излучаемый в линию. В свою очередь, это может ограничить уровень электромагнитных помех продукта, нарушая определенные цели и правила проектирования. Эффективное постоянное напряжение относительно высокое из-за схемы удвоения входного напряжения. Наконец, стоимость самой схемы удвоителя напряжения высока из-за двух конденсаторов большой мощности. Лучшим решением для минимизации этих проблем было бы использование трехфазного инверторного моста, как описано в следующем разделе. Входная секция заменена стандартным выпрямителем с диодным мостом. Выходная секция имеет трехфазный инверторный мост. Основным отличием от предыдущей схемы является способ подключения обмоток двигателя к инвертору. Один конец основной и пусковой обмоток соединены по одному полумосту. Остальные концы связаны вместе и соединены с третьим полумостиком. Благодаря такой топологии привода управление становится более эффективным. Чтобы иметь равные уровни нагрузки по напряжению на всех устройствах, что повышает эффективность использования устройства и обеспечивает максимально возможное выходное напряжение для данного напряжения на шине постоянного тока, все три напряжения фаз инвертора поддерживаются с одной и той же амплитудой, как указано : | Ва | = | Вб | = | ВК | Эффективное напряжение на основной и пусковой обмотках определяется по формуле: Vmain = Va-Vc Vstart = Vb-Vc Направление вращения можно легко контролировать с помощью фазового угла Vc относительно Va и Vb . На рисунках на стр. 87 показаны фазные напряжения Va, Vb и Vc, действующие напряжения на основной обмотке (Vmain) и пусковой обмотке (Vstart) для прямого и обратного направлений соответственно. Использование метода управления трехфазным инвертором на компрессоре мощностью 300 Вт дало 30-процентную экономию электроэнергии по сравнению с первыми двумя методами. Еще одно преимущество трехфазного метода управления заключается в том, что для управления трехфазным асинхронным двигателем можно использовать одну и ту же топологию приводного оборудования. В этом сценарии микроконтроллер должен быть перепрограммирован для вывода синусоидальных напряжений со сдвигом фаз друг к другу на 120 градусов, что приводит в действие трехфазный асинхронный двигатель. Однофазные асинхронные двигатели очень популярны в бытовой технике, а также в промышленности и быту. PSC являются наиболее популярным типом однофазных асинхронных двигателей. Управление скоростью двигателя имеет много преимуществ, таких как энергоэффективность, снижение звукового шума и лучший контроль над приложением. В этой статье мы обсудили различные методы управления скоростью, которые можно использовать с двигателем PSC в однонаправленном и двунаправленном направлениях. Управление двигателем PSC с использованием топологии трехфазного инвертора обеспечивает наилучшие результаты. Разработка и развертывание алгоритмов управления скоростью асинхронного двигателя с использованием Simulink Управление скоростью асинхронного двигателя — это процесс управления токами в асинхронном двигателе для регулирования скорости. Хотя асинхронные двигатели часто используются в приложениях с фиксированной частотой, они популярны для приложений с переменной частотой, таких как промышленные приводы и электромобили. Для работы с переменной частотой инвертор модулирует ток в обмотках статора. К сожалению, ваш браузер не поддерживает встроенные видео. Скольжение и результирующий крутящий момент для асинхронного двигателя Условные обозначения: Для асинхронного двигателя с короткозамкнутым ротором регулирование скорости с помощью управления по полю (FOC) регулирует I d и I q таким образом, что поток пропорционален I d , а крутящий момент пропорционален I д . Такой подход увеличивает диапазон скоростей и улучшает как динамические, так и установившиеся характеристики. Эта диаграмма Simulink иллюстрирует типичный алгоритм FOC для управления скоростью трехфазного асинхронного двигателя с короткозамкнутым ротором. Алгоритм FOC для управления скоростью асинхронного двигателя. Основные компоненты стратегий управления асинхронными двигателями Включают: Simscape Electrical™ и Motor Control Blockset™ предоставляют асинхронный двигатель и примеры управления, ориентированного на поле, для разработки имитационной модели для управления скоростью асинхронного двигателя. Моделирование управления скоростью асинхронного двигателя с помощью Simulink помогает сократить время тестирования прототипа и позволяет проверить устойчивость алгоритмов управления к неисправностям, которые нецелесообразно тестировать на оборудовании. Используя Simscape Electrical and Motor Control Blockset, инженеры по управлению двигателем разрабатывают управление скоростью асинхронного двигателя: Поле-ориентированное управление асинхронными двигателями с помощью Simulink и набора блоков управления двигателем. 5:34 Поле-ориентированное управление асинхронными двигателями с помощью Simulink и блока управления двигателем Поле-ориентированное управление асинхронными двигателями с помощью Simulink. 3 видео Поле-ориентированное управление асинхронными двигателями с помощью Simulink (3 видео) Как много вы знаете о конструкции управления силовой электроникой? Начать тест
E 2 — ЭДС ротора
Н s — синхронная скорость
R 2 — сопротивление ротора
X 2 Регулятор скорости со стороны статора
Управление V/f или управление частотой
Таким образом, важно поддерживать постоянный поток, φ, и это возможно только при изменении напряжения. то есть, если мы уменьшим частоту, поток увеличится, но в то же время, если мы уменьшим поток напряжения, он также уменьшится, не вызывая изменения потока, и, следовательно, он останется постоянным. Итак, здесь мы сохраняем отношение V/f постоянным. Отсюда и название метода V/f. Для управления скоростью трехфазного асинхронного двигателя методом V/f мы должны обеспечить переменное напряжение и частоту, которые легко получить с помощью преобразователя и набора инверторов. Управление напряжением питания
Мы знаем, что ЭДС ротора E 2 ∝ V. Итак, T ∝ sV 2 .
Приведенное выше уравнение ясно показывает, что при уменьшении напряжения питания крутящий момент также уменьшится. Но для обеспечения той же нагрузки крутящий момент должен остаться прежним, а это возможно только в том случае, если мы увеличим скольжение, а если скольжение увеличится, двигатель будет работать с пониженной скоростью. Этот метод управления скоростью используется редко, потому что небольшое изменение скорости требует большого снижения напряжения, и, следовательно, увеличивается ток, потребляемый двигателем, что вызывает перегрев асинхронного двигателя. Изменение количества полюсов статора:
Метод многократной обмотки статора.
Метод амплитудной модуляции полюсов (PAM)
Метод с несколькими обмотками статора
Эти две обмотки статора электрически изолированы друг от друга и намотаны на два разных числа полюсов. При использовании схемы переключения питание одновременно подается только на одну обмотку, и, следовательно, возможно регулирование скорости. Недостатки этого метода заключаются в том, что плавное регулирование скорости невозможно. Этот метод является более дорогостоящим и менее эффективным, так как требуются две разные обмотки статора. Этот метод управления скоростью может быть применен только к двигателю с короткозамкнутым ротором. Метод амплитудной модуляции полюсов (PAM)
f 2 (θ) — волна модуляции МДС.
P 1 число полюсов асинхронного двигателя, скорость которого необходимо контролировать.
P 2 число полюсов волны модуляции. Добавление реостата в цепь статора
Регулирование скорости со стороны ротора
Добавление внешнего сопротивления со стороны ротора
Уравнение крутящего момента для трехфазного асинхронного двигателя: Метод каскадного управления
Пусть N S1 будет синхронной скоростью главного двигателя.
N S2 — синхронная скорость вспомогательного двигателя.
P 1 число полюсов главного двигателя.
P 2 число полюсов вспомогательного двигателя.
F – частота питания.
F 1 – частота ЭДС ротора главного двигателя.
Н – это заданная скорость, и она остается одинаковой как для основного, так и для вспомогательного двигателя, так как оба двигателя установлены на общем валу.
S 1 — проскальзывание главного двигателя. Такой тип каскадирования называется кумулятивным каскадированием. Существует еще один тип каскадирования, при котором крутящий момент, создаваемый основным двигателем, направлен в противоположную сторону от вспомогательного двигателя. Такой тип каскадирования называется дифференциальным каскадированием; в результате скорость соответствует количеству полюсов (P 1 – P 2 ).
В этом методе управления скоростью трехфазного асинхронного двигателя можно получить четыре разные скорости Подача ЭДС частоты скольжения на сторону ротора
Следовательно, при таком способе управления скоростью КПД трехфазного асинхронного двигателя снижается. Эта потеря мощности скольжения может быть восстановлена и возвращена для повышения общего КПД трехфазного асинхронного двигателя, и эта схема восстановления мощности называется схемой восстановления мощности скольжения, и это делается путем подключения внешнего источника ЭДС частоты скольжения. к цепи ротора. Инжектируемая ЭДС может либо противодействовать ЭДС ротора, либо способствовать ЭДС ротора. Если она противостоит ЭДС, индуцированной ротором, общее сопротивление ротора увеличивается и, следовательно, скорость уменьшается, а если инжектируемая ЭДС помогает ЭДС главного ротора, общая уменьшается и, следовательно, скорость увеличивается. Поэтому, вводя ЭДС индукции в цепь ротора, можно легко управлять скоростью. Основное преимущество этого типа управления скоростью трехфазного асинхронного двигателя заключается в том, что возможен широкий диапазон управления скоростью, независимо от того, выше она или ниже нормальной скорости.
Кредитная карта не требуется — это абсолютно бесплатно. Три способа управления однофазным асинхронным двигателем
Либо путем добавления дополнительных обмоток, внешних реле и переключателей, либо путем добавления зубчатых механизмов можно изменить направление вращения. Используя системы управления на основе микроконтроллеров, можно добавить в систему изменение скорости. В дополнение к опции изменения скорости также может быть изменено направление вращения, в зависимости от используемых алгоритмов управления двигателем. Интерфейс микроконтроллера
Аппаратный интерфейс для PIC 18F2431 или dsPIC30F2010. К наиболее ценным функциям ШИМ относятся дополнительные каналы с программируемым мертвым временем. ШИМ могут быть выровнены по краю или по центру. Выровненные по центру ШИМ имеют то преимущество, что они уменьшают электромагнитный шум (ЭМП), излучаемый продуктом. Вариант №1: однонаправленное управление
Представление блок-схемы топологии привода с тремя основными секциями здания. При такой конфигурации двигатель может иметь только два выступающих провода (М1 и М2). Показанный микроконтроллер имеет модуль ШИМ, способный выводить до трех пар ШИМ с мертвой зоной между парами. Двунаправленное управление с помощью Н-моста. Двунаправленное управление
Это позволяет разработчику системы постоянно удалять из цепи конденсатор, включенный последовательно с пусковой обмоткой, тем самым снижая общую стоимость системы. Вариант № 2: инвертор H-Bridge
Для изменения направления вращения напряжение, подаваемое на основную обмотку, должно опережать напряжение, подаваемое на пусковую обмотку. Фазные напряжения при вращении двигателя в прямом и обратном направлении. Вариант №3: Использование трехфазного инверторного моста
Управление с помощью трехфазного инверторного моста. Однако алгоритм управления усложняется. Напряжения обмоток, Va, Vb и Vc, должны регулироваться для достижения разности фаз между действующими напряжениями на основной и пусковой обмотках, чтобы иметь сдвиг фаз друг к другу на 90 градусов. Требуемые ресурсы микроконтроллера Ресурс Однонаправленный Двунаправленный H-мост Двунаправленный с трехфазным мостом Примечания Память программ 1,5 Кбайт 2,0 Кбайт 2,5 Кбайт — Память данных ~20 байт ~25 байт ~25 байт — каналов ШИМ 2 канала 2 канала 3 канала Дополняет время простоя Таймер 1 1 1 8- или 16-битный Аналого-цифровой преобразователь 3-4 канала 3-4 канала 3-4 канала Ток двигателя, измерение температуры, потенциометр управления скоростью Цифровые входы/выходы от 3 до 4 от 3 до 4 от 3 до 4 Для пользовательских интерфейсов, таких как переключатели и дисплеи Входы ошибок 1 или 2 1 или 2 1 или 2 От превышения тока/перенапряжения/перегрева и т. д. Сложность алгоритма управления Низкий Средний Высокий — Сравнение стоимости Однонаправленный Двунаправленный с H-мостом Двунаправленный с трехфазным мостом Секция входного преобразователя Low — однофазный диодный мостовой выпрямитель Высокий — из-за цепи удвоителя напряжения Low — однофазный диодный мостовой выпрямитель Секция выходного инвертора Низкий — два полумоста Средний — два полумоста. Выключатели силовые повышенного напряжения Высокий — трехфазный инвертор. Использование встроенных силовых модулей (IPM) лучше, чем использование отдельных компонентов Двигатель Средний — требуется пусковой конденсатор Низкий уровень — пусковой конденсатор снят с двигателя Низкий уровень — пусковой конденсатор снят с двигателя Время разработки Короткий Средний диапазон Длинный Общая стоимость Низкий Средний Средний — Эффективный контроль за заданную стоимость Это сокращает время разработки. Фазное напряжение при вращении двигателя в прямом и обратном направлениях. Веб-ресурсы Обзор типов двигателей, классификации двигателей и приложений с использованием PIC и dsPIC от Microchip:
http://rbi. ims.ca/3860-559 Спецификации программирования и примечания по применению для микроконтроллера PIC 18FXX31:
http://rbi.ims.ca/3860-560 Средства разработки управления двигателем от Microchip:
http://rbi.ims.ca/3860-561 Управление скоростью асинхронного двигателя — MATLAB и Simulink
Управление скоростью асинхронного двигателя
Желтая стрелка – результирующий крутящий момент
Пурпурная стрелка – вращающееся магнитное поле статора связь магнитных полей в статоре и роторе. Токи в статоре создают вращающееся магнитное поле, которое индуцирует токи и отстающее магнитное поле в роторе. Взаимодействие магнитного поля заставляет ротор вращаться с угловой скоростью, меньшей, чем скорость вращения поля статора. Эта задержка вращения, называемая проскальзыванием, создает крутящий момент на валу двигателя. Увеличение нагрузки на двигатель увеличивает скольжение и выходной крутящий момент двигателя. Simulink ® позволяет использовать многоскоростное моделирование для проектирования, настройки и проверки алгоритмов FOC во всем рабочем диапазоне двигателя перед тестированием оборудования. Этот контур имеет более низкую частоту дискретизации по сравнению с внутренним контуром (управление током) и генерирует заданное значение крутящего момента. Заданное значение обрабатывается для создания опорного тока по осям d и q для внутреннего контура
Продолжительность видео 5:34. Примеры и инструкции
Ориентированное на поле управление асинхронными двигателями с помощью Simulink и блока управления двигателем (5:34)
— Видео
Прямое управление крутящим моментом асинхронной машины с модулятором пространственного вектора
— Пример
Бездатчиковое полеориентированное управление асинхронным двигателем
— Пример
Поле-ориентированное управление асинхронным двигателем с использованием датчика скорости
— Пример
Управление без обратной связи и калибровка двигателя переменного тока
— Пример
Полеориентированное управление индукционной машиной
— Пример
Справочник по программному обеспечению
Индукционный двигатель
— Документация
Опорные сигналы управления асинхронным двигателем, ориентированные на поле
— Документация
Оценщик скорости скольжения для асинхронного двигателя
— Документация
Поле-ориентированное управление приводом асинхронного двигателя
— Документация
Учебники и примеры глубокого обучения — MATLAB и Simulink.
Переходите от простых задач к более сложным маневрам, просматривая интерактивные примеры и учебные пособия.
Изучите примеры управления двигателем
Ознакомьтесь с примерами преобразования энергии
Ознакомьтесь с примерами питания от аккумуляторов
Ознакомьтесь с сообществом по управлению силовой электроникой
Сообщество MathWorks для студентов, исследователей и инженеров, использующих Simulink для применения управления силовой электроникой к электромобилям, возобновляемым источникам энергии, аккумуляторным системам, преобразованию энергии и управлению двигателем.
Начать обсуждение
Смотреть видео
Испытания.
Получите бесплатную пробную версию
30 дней исследования в ваших руках.
Загрузить сейчас
Понимание алгоритмов управления двигателем BLDC
Читать электронную книгу
Выберите сеть
Сайт
Выберите веб-сайт, чтобы получить переведенный контент, где он доступен, и посмотреть местные события и
предложения. На основе
ваше местоположение, мы рекомендуем вам выбрать: .
Вы также можете выбрать веб-сайт из следующего списка:
Европа
Обратитесь в местный офис
Регулятор скорости асинхронного двигателя
Скорость трехфазного асинхронного двигателя определяется выражением
N = N с (1 – с)
и N с = 120f/P
Это показывает, что скорость трехфазного асинхронного двигателя зависит от синхронная скорость (N s ) и скольжение(я). Синхронная скорость асинхронного двигателя зависит от частоты питания и количества полюсов статора.
Таким образом, изменяя частоту питания, количество полюсов статора и скольжение, мы можем изменить скорость трехфазного асинхронного двигателя. Следовательно, управление скоростью трехфазного асинхронного двигателя может быть достигнуто следующими способами:
Синхронная скорость может быть изменена путем изменения частоты питания статора (f). Но только изменение частоты питания при постоянном напряжении питания отрицательно влияет на поток в воздушном зазоре. Поскольку поток в воздушном зазоре пропорционален соотношению напряжения питания и частоты питания.
Следовательно, соотношение напряжения питания и частоты питания поддерживается постоянным за счет одновременного изменения напряжения и частоты статора. Это необходимо для поддержания постоянного потока в воздушном зазоре. Таким образом, этот метод также известен как постоянный (V/f) контроль.
В этом трехфазном методе управления скоростью двигателя вход переменного тока постоянного напряжения и постоянной частоты подается на выпрямитель, который преобразует переменный ток в постоянный. Выход выпрямителя фильтруется батареей конденсаторов и подается на схему инвертора. Инвертор преобразует постоянное напряжение в трехфазное переменное напряжение и переменную частоту.
Это питание подается на обмотку статора двигателя. Таким образом, мы получаем постоянное управление скоростью V/f асинхронного двигателя.
В этом методе поток в воздушном зазоре остается постоянным. Таким образом, можно получить плавное регулирование скорости. Таким методом можно получить максимальный крутящий момент на всех скоростях.
Из-за больших капитальных вложений эта система оправдана только для приводов, для которых важны прочные, не требующие обслуживания характеристики асинхронного двигателя. В противном случае двигатель постоянного тока с преобразователем частоты является логичной и дешевой альтернативой.
Управление скоростью асинхронного двигателя напряжением статора
В этом методе управления скоростью асинхронного двигателя для изменения скорости двигателя изменяется только напряжение статора, частота статора поддерживается постоянной. Мы можем изменять скорость двигателя, изменяя напряжение статора. С увеличением напряжения статора скорость двигателя будет увеличиваться.
В этом методе управления скоростью асинхронного двигателя , когда напряжение статора уменьшается, поток воздушного зазора и крутящий момент двигателя уменьшаются. Управление скоростью достигается за счет снижения крутящего момента двигателя.
В этом методе создается очень низкий пусковой момент. Следовательно, этот тип управления не подходит для нагрузок с постоянным крутящим моментом. Этот тип управления предпочтителен в таких приложениях, как вентиляторы, центробежные насосы и воздуходувки, где требуется низкий пусковой момент.
Этот метод применим только для небольших двигателей и нагрузок вентиляторного типа, когда крутящий момент нагрузки увеличивается с увеличением скорости. Двигатель имеет тенденцию перегреваться при других нагрузках. Это широко используемый метод для потолочных вентиляторов, приводимых в действие однофазными асинхронными двигателями, которые имеют большое сопротивление покоя, ограничивающее ток, потребляемый двигателем.
Регулирование скорости асинхронного двигателя с помощью полюсов статора
С помощью подходящего переключателя подключение статора можно изменить таким образом, чтобы изменить количество полюсов статора. Это изменяет фактическую скорость двигателя, поскольку фактическая скорость двигателя примерно обратно пропорциональна количеству полюсов.
При подходящих соединениях одна обмотка может давать две разные скорости. Если требуется более двух скоростей, в один и тот же паз помещаются две отдельные обмотки. Теперь каждая обмотка может дать две скорости, а две обмотки могут дать четыре разные скорости. В пружинном двигателе необходимо соответствующим образом изменить полюса ротора. Поэтому это трудно применить этот метод к двигателю с контактными кольцами.
Управление скоростью асинхронного двигателя по сопротивлению ротора
Как видно из названия, этот метод управления скоростью трехфазного двигателя применим только к асинхронному двигателю с контактными кольцами.
Как известно, на подсинхронных скоростях (скоростях ниже синхронной скорости) управление токосъемной индукцией возможно путем введения переменного сопротивления в цепь ротора двигателя. Этот метод основан на общем принципе, согласно которому скольжение асинхронного двигателя увеличивается (т. е. скорость уменьшается) по мере увеличения потерь мощности в цепи ротора.
Этот метод обеспечивает широкий диапазон скоростей и хороший пусковой момент. Максимальный крутящий момент при этом остается постоянным. Хорошая регулировка скорости может быть достигнута как для нагрузок с постоянным крутящим моментом, так и для нагрузок вентиляторного типа.
Традиционный метод управления сопротивлением ротора требует одновременного и точного изменения всех трех уравновешенных резисторов в каждой фазе. Часто этого трудно добиться.
Чтобы решить эту проблему, используется высокочастотный тиристорный прерыватель, который позволяет изменять внешнее сопротивление одновременно и беспрерывно.
На рисунке показана схема, в которой мощность скольжения ротора выпрямляется в трехфазном мостовом выпрямителе и подается через фильтрующий дроссель на внешнее сопротивление.
Тиристор (показан значком переключателя на рисунке) в прерывателе, подключенном через резистор, включается и выключается с высокой частотой. Отношение времени включения к времени выключения определяет действующее значение сопротивления цепи ротора и, таким образом, управляет скоростью двигателя, изменяя его скоростно-моментную характеристику.
Самым большим недостатком этого метода является его низкая эффективность из-за потери мощности на внешнем сопротивлении ротора. Поэтому этот метод применяется для узкого диапазона скоростей и, как правило, на короткое время.
Вместо того, чтобы тратить энергию скольжения на внешнее сопротивление ротора, можно использовать обратную связь для повышения эффективности этой схемы управления скоростью. Это достигается использованием преобразователя и инвертора в цепи ротора, как показано на рисунке.
При подаче электроэнергии в цепь ротора (отрицательные потери мощности ротора) становится возможной работа на сверхсинхронной скорости (т.