Содержание
Регулирование скорости вращения и реверсирование асинхронных электродвигателей
- Подробности
- Категория: Учеба
- электродвигатель
- электроснабжение
- сооружения
- оборудование
- подстанции
- обучение
- приборы
- среднее напряжение
Содержание материала
- Электротехника и электрооборудование
- Счетчики электрической энергии
- Мегомметры
- Измерение неэлектрических
- Асинхронные двигатели
- Пуск асинхронных двигателей
- Регулирование скорости асинхронных
- Данные асинхронных двигателей
- Синхронные машины
- Передвижные электростанции
- Синхронные электродвигатели
- Машины постоянного тока
- Генераторы постоянного тока
- Двигатели постоянного тока
- Электропривод генератор-двигатель
- Трансформаторы
- Конструкция трансформаторов до 10
- Данные трансформаторов до 10
- Специальные трансформаторы
- Измерительные трансформаторы
- Аппаратура управления и защиты
- Аппаратура автоматическая
- Реле защиты и управления
- Логические элементы
- Электропривод на строительстве
- Выбор электродвигателя
- Схемы электроприводы
- Электропривод строительных
- Сварочное электрооборудование
- Электрическое освещение
- Устройство освещения
- Нормы освещенности
- Электрические сети строительные
- Аппаратура подстанций
- Электрические сети
- Устройство электрических сетей
- Выбор сечения проводов
- Безопасность обслуживания
- Защитное заземление
Страница 7 из 39
Регулирование скорости вращения асинхронных двигателей производят несколькими способами. Формула скорости вращения асинхронных двигателей:
Формула скорости вращения асинхронных двигателей:
(7.7) где s — скольжение в долях единицы показывает, что скорость вращения может регулироваться изменением частоты тока f, числа пар полюсов р и скольжения s.
Регулирование скорости вращения изменением величины скольжения асинхронного электродвигателя возможно двумя способами:
- введением в цепь ротора дополнительного сопротивления, что возможно для двигателей с фазным ротором;
- изменением реактивных сопротивлений (дросселей насыщения), включаемых в обмотку статора.
Регулирование скорости асинхронных электродвигателей с фазным ротором введением в его цепь дополнительного сопротивления позволяет уменьшать его скорость практически не более чем на 40—50% номинальной скорости.
При таком регулировании с увеличением сопротивления реостата увеличивается величина скольжения, т. е. уменьшается число оборотов двигателя. В этом случае схема регулирования сходна со схемой пуска асинхронного электродвигателя с фазным ротором (см. рис.7.8) с той разницей, что регулировочный реостат должен быть рассчитай на длительную нагрузку током. Регулирование скорости с помощью добавочного сопротивления в цепи ротора приводит к неустойчивой работе электродвигателя на малых оборотах, так как при этом приходится включать большие сопротивления, что приводит к значительным колебаниям скорости при небольших изменениях момента сопротивления нагрузки. Кроме того, этот способ мало экономичен, так как увеличивает потери в роторной цепи.
рис.7.8) с той разницей, что регулировочный реостат должен быть рассчитай на длительную нагрузку током. Регулирование скорости с помощью добавочного сопротивления в цепи ротора приводит к неустойчивой работе электродвигателя на малых оборотах, так как при этом приходится включать большие сопротивления, что приводит к значительным колебаниям скорости при небольших изменениях момента сопротивления нагрузки. Кроме того, этот способ мало экономичен, так как увеличивает потери в роторной цепи.
Описанный способ регулирования асинхронных электродвигателей с фазным ротором применяется в тех случаях, когда работа электродвигателя с пониженной скоростью непродолжительна и когда не требуется большой точности регулирования, например для регулирования скорости движения механизмов подъемно-транспортных установок.
Регулирование скорости асинхронных электродвигателей при помощи дросселей насыщения состоит в том, что в цепь статора электродвигателя включаются реактивные сопротивления с переменной индуктивностью. Изменение индуктивности реактивных сопротивлений (дросселей) осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями (рис. 7.13, а).
Изменение индуктивности реактивных сопротивлений (дросселей) осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями (рис. 7.13, а).
Изменяемое индуктивное сопротивление в цепи статора электродвигателя позволяет получать на зажимах машины различное напряжение (рис. 7.13, б), чем достигается изменение скольжения, т. е. скорости вращения ротора. Достоинством описанного способа является плавное регулирование скорости вращения электродвигателя; недостатками — значительное уменьшение максимального вращающего момента, а также уменьшение коэффициента мощности и к. п. д. электродвигателя.
Регулирование скорости вращения асинхронного электродвигателя за счет изменения числа пар полюсов осуществляется переключением обмотки статора и является ступенчатым. Для этих целей применяют специальные асинхронные многоскоростные электродвигатели, выпускаемые промышленностью и рассчитанные на 2, 3 и 4 скорости. Так, например, четырех скорости ой электродвигатель может иметь синхронные скорости вращения 500, 750, 1000 и 1500 об/мин.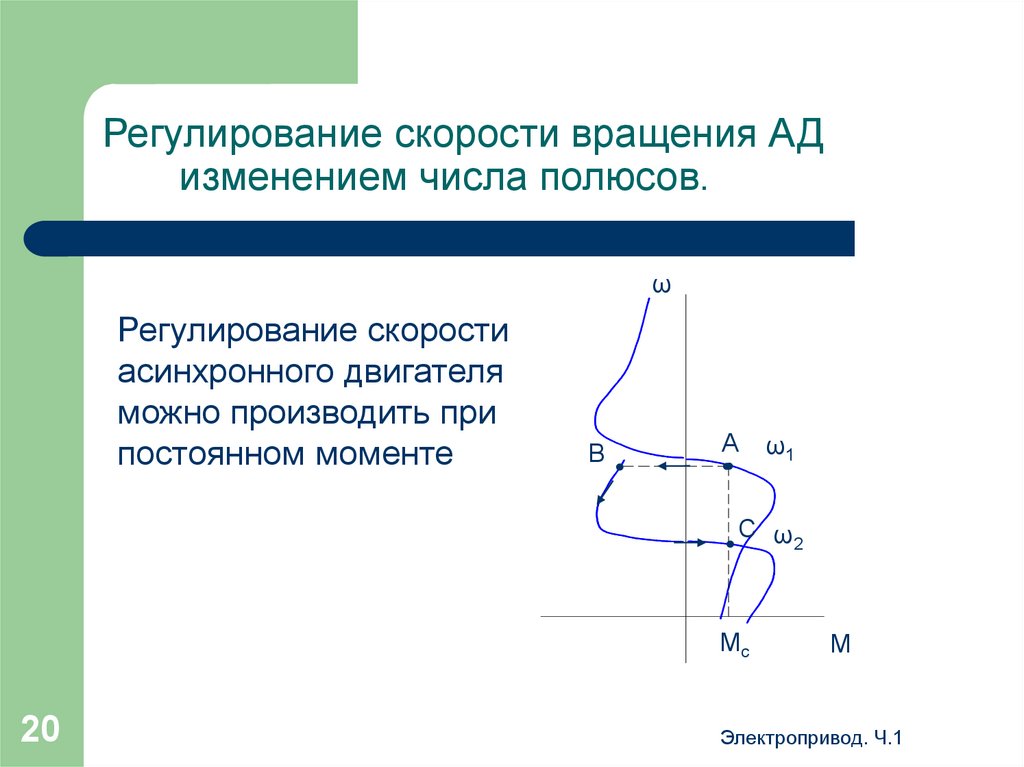
Рис. 7.13. Схема включения и регулирования скорости асинхронных двигателей с короткозамкнутым ротором при помощи дросселей насыщения:
а — схема включения; б — механические характеристики
Рис. 7.14. Переключение проводов для изменения направления вращения асинхронного двигателя
Изменение числа пар полюсов достигают наиболее простым способом при устройстве двух независимых обмоток на статоре асинхронного электродвигателя. Такие электродвигатели выпускают с синхронными скоростями вращения 1000/1500 об/мин.
Двухскоростные электродвигатели имеют шесть, трехскоростные— девять и четырехскоростные — двенадцать выводов к переключателю полюсов.
Регулирование скорости вращения асинхронного электродвигателя изменением частоты тока требует применения специального источника переменного тока с изменяемой частотой. Этот способ еще не нашел применения для регулирования скорости электроприводов строительных машин, но является весьма перспективным при использовании для статических преобразователей частоты управляемых, полупроводниковых вентилей-тиристоров, производство которых в настоящее время развивается (о тиристорах см. гл. 10).
гл. 10).
Изменение направления вращения асинхронного двигателя — реверсирование достигается изменением направления вращения магнитного
поля. Для этого достаточно переключить любые два провода трехфазной системы, подводящие ток к статору двигателя. На рис. 7.14 приведена схема такого переключения. При переключении трех проводов направление вращения магнитного поля статора, а следовательно, и ротора двигателя не изменится.
§ 7.9. Потери энергии и коэффициент полезного действия асинхронных электродвигателей. Коэффициент мощности двигателей
Электрическая энергия, расходуемая при работе асинхронного электродвигателя, затрачивается на полезную механическую работу и на покрытие потерь: электрических, магнитных и механических.
Потери в меди или электрические потери обусловлены нагреванием обмоток статора и ротора при протекании по ним тока. Потери в стали (магнитные потери) состоят из потерь на вихревые токи и на перемагничивание в стальных частях статора и ротора. Потери на вихревые токи пропорциональны квадрату частоты тока, а на перемагничивание — первой степени частоты тока. Магнитные потери главным образом происходят в статоре. Потери в стали ротора ничтожно малы вследствие малой частоты его тока и поэтому ими можно пренебрегать.
Потери на вихревые токи пропорциональны квадрату частоты тока, а на перемагничивание — первой степени частоты тока. Магнитные потери главным образом происходят в статоре. Потери в стали ротора ничтожно малы вследствие малой частоты его тока и поэтому ими можно пренебрегать.
Механические потери состоят из расхода энергии на трение в подшипниках, трение ротора о воздух и воздуха в вентиляционной системе электродвигателя. Эти потери зависят от скорости вращения ротора, его диаметра, типа подшипников и конструкции вентиляционной системы двигателя.
Коэффициентом полезного действия (к. п. д.) двигателя называют отношение полезной механической мощности Р3 на валу двигателя к затраченной мощности, потребляемой из сети P1
(7-8)
Так как разница между затраченной и полезной мощностью равна потерям, то формулу получения к. п. д. двигателя можно записать в следующем виде:
(7.9)
где рм — потери в меди или электрические потери; рс — потери в стали или магнитные потери;
Рмех — механические потери.
Потери в меди являются переменными, зависящими от нагрузки, вследствие того что с увеличением тока увеличивается назревание обмоток.
Потери в стали (магнитные) и механические потери являются постоянными, так как не зависят от нагрузки.
Коэффициент полезного действия двигателя изменяется в зависимости от нагрузки.
Наибольшей величины к. п. д. достигает при нагрузке, равной примерно 0,75 номинальной, а затем с увеличением нагрузки к. п. д. уменьшается вследствие увеличения электрических потерь на нагревание обмоток (рис. 7.15, а).
Большое магнитное сопротивление воздушного зазора между статором и ротором асинхронного двигателя приводит к значительной величине намагничивающего (реактивного) тока, составляющего примерно 0,4—0,7 от номинальной силы тока электродвигателя. В связи с этим двигатель всегда работает с cos φ, меньшим единицы. При полной нагрузке коэффициент мощности cos φ двигателей достигает максимальной величины 0,8—0,9 (рис. 7.15, б).
Рис.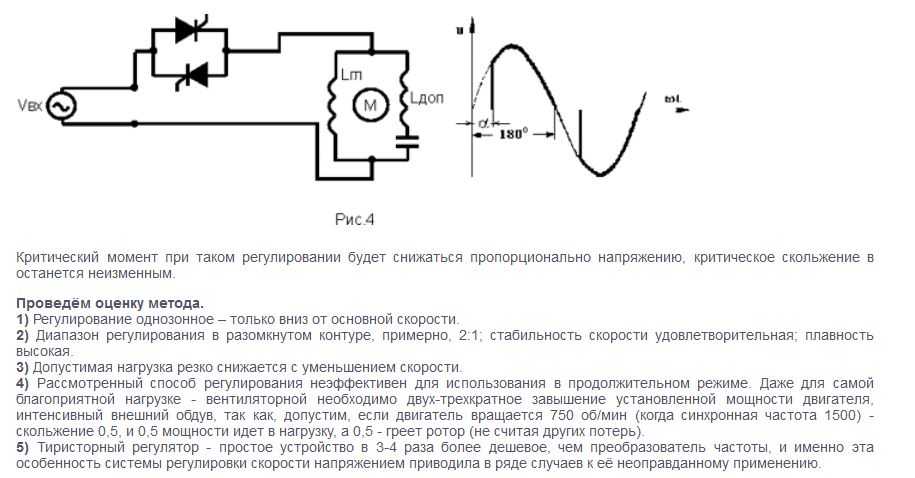 7.15. Зависимость коэффициента мощности асинхронного двигателя от его нагрузки
7.15. Зависимость коэффициента мощности асинхронного двигателя от его нагрузки
С уменьшением нагрузки коэффициент мощности снижается, что объясняется малой зависимостью от нагрузки намагничивающего (реактивного) тока. Сила тока двигателя складывается из двух величин: активного тока, зависящего от нагрузки, и реактивного тока, независимого от нагрузки. Поэтому при механической недогрузке активный ток уменьшается и, следовательно, увеличивается относительная величина реактивного тока, что приводит к снижению коэффициента мощности cos φ.
- Назад
- Вперёд
- Назад
- Вы здесь:
- Главная
- Книги
- Учеба
 org/ListItem»> Электротехника и электрооборудование
org/ListItem»> Электротехника и электрооборудованиеЕще по теме:
- В помощь сельскому электромонтеру
- Электроснабжение в строительстве
- Электромонтер строительной площадки
- Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Электрические аппараты и оборудование выше 1000В
Регулирование частоты вращения асинхронного двигателя изменением скольжения
Регулирование частоты вращения асинхронного двигателя изменением скольжения является одним из простых способов регулирования. В то же время при изменении (увеличении) скольжения в соответствии с формулами (32), (34) изменяются (увеличиваются) потери в обмотке ротора, что приводит к уменьшению КПД при регулировании. Регулирование скольжения можно осуществлять как со стороны статора, так и со стороны ротора. Естественно, что во втором случае ротор должен быть фазным и иметь выведенную на контактные кольца обмотку.
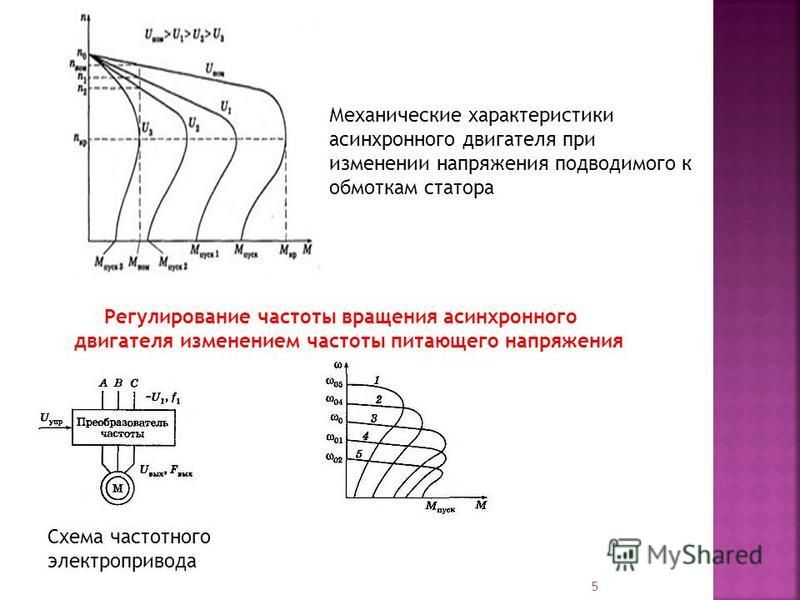
При регулировании со стороны статора изменяют приложенное к его обмотке напряжение. Увеличение напряжения сверх номинального приводит к насыщению магнитной цепи двигателя и потому не применяется. Для регулирования частоты вращения асинхронного двигателя уменьшают напряжение питания. При этом развиваемый двигателем момент изменяется пропорционально квадрату напряжения и соответственно изменяются механические характеристики двигателя (рис. 28,а), в результате чего изменяются и значения рабочих скольжений. Очевидно, что регулирование возможно в диапазоне изменения скольжения от 0 до sкр. Для получения достаточно большого диапазона изменения частоты вращения необходимо увеличивать sкр, т. е. применять двигатели с повышенным скольжением типа 4АС (рис. 28,б).
Рис. 28. Механические характеристики асинхронных двигателей при различных значениях первичного напряжения: а — двигатель нормального исполнения; б — двигатель с повышенным скольжением
Этот метод регулирования частоты вращения асинхронного двигателя применяется также для двигателей с фазным ротором, причем в этом случае в цепь ротора включаются добавочные сопротивления для увеличения sкр.
В связи с пониженным КПД и трудностями регулирования напряжения рассматриваемый метод применяется только для двигателей относительно малой мощности. При этом для регулирования U1 можно использовать регулируемые автотрансформаторы или резисторы, включенные последовательно в первичную цепь, а также реакторы насыщения, регулируемые путем подмагничивания постоянным током (магнитные усилители). При изменении постоянного тока подмагничивания индуктивное сопротивление реактора изменяется, что приводит к изменению напряжения на зажимах двигателя. Путем автоматического регулирования тока подмагничивания можно расширить зону регулирования частоты вращения в область s>sкр и получить при этом, жесткие механические характеристики.
Кроме магнитных усилителей применяются также управляемые и полууправляемые полупроводниковые регуляторы напряжения, также позволяющие в широком диапазоне регулировать приложенное напряжение и осуществлять автоматическое регулирование частоты вращения двигателя.
Частным случаем рассмотренного способа является импульсное регулирование частоты вращения, при котором асинхронный двигатель периодически подключается к сети и отключается от нее. При этом двигатель постоянно находится в переходном режиме ускорения (подключен к сети) или торможения (отключен от сети). Подбирая соотношение времени включения ко времени отсутствия питания, можно регулировать среднюю частоту вращения двигателя в широком диапазоне.
При регулировании со стороны ротора в основном применяется реостатное регулирование частоты вращения путем введения в цепь обмотки ротора добавочных активных сопротивлений (резисторов). При этом важно заметить, что изменение в широких пределах частоты вращения двигателя при данном способе регулирования не повлечет за собой изменения максимального (критического) момента Мmах (см. рис. 22). Таким образом, перегрузочная способность двигателя при регулировании не снижается.
Если асинхронный двигатель работает с некоторым приводимым механизмом на валу со статическим моментом сопротивления Мс (см. рис. 22), то на естественной характеристике установившемуся режиму его работы будет соответствовать точка 1. При введении добавочных сопротивлений — резисторов Rд1 — Rд3 — в цепь ротора произойдет соответствующий переход двигателя в новые режимы работы с меньшими частотами вращения: n1>n2>n3>n4. Характеристики двигателя по мере увеличения сопротивления резисторов в цепи ротора Rд становятся более мягкими. Наиболее жесткой характеристикой в данном случае будет естественная характеристика.
рис. 22), то на естественной характеристике установившемуся режиму его работы будет соответствовать точка 1. При введении добавочных сопротивлений — резисторов Rд1 — Rд3 — в цепь ротора произойдет соответствующий переход двигателя в новые режимы работы с меньшими частотами вращения: n1>n2>n3>n4. Характеристики двигателя по мере увеличения сопротивления резисторов в цепи ротора Rд становятся более мягкими. Наиболее жесткой характеристикой в данном случае будет естественная характеристика.
Работа двигателя на естественной характеристике в данном случае будет наиболее стабильной и устойчивой. Это означает, что при изменении момента сопротивления Мс в процессе работы производственного механизма отклонения частоты вращения двигателя будут минимальными.
Технические показатели данного способа регулирования следующие:
- диапазон регулирования сравнительно небольшой — порядка 2 : 1 и ограничивается вероятностью нестабильности работы двигателя при больших значениях сопротивлений резисторов Rд;
- плавность регулирования при реостатном регулировании небольшая и определяется числом ступеней регулирования.
 Переключение ступеней осуществляется, как правило, с помощью магнитных контроллеров, контакторов и реле.
Переключение ступеней осуществляется, как правило, с помощью магнитных контроллеров, контакторов и реле.
 Переключение ступеней осуществляется, как правило, с помощью магнитных контроллеров, контакторов и реле.
Переключение ступеней осуществляется, как правило, с помощью магнитных контроллеров, контакторов и реле.Кроме реостатного регулирования применяется регулирование частоты вращения путем введения добавочной ЭДС в обмотку ротора асинхронного двигателя.
Регулирование частоты вращения асинхронного двигателя путем увеличения его скольжения всегда связано с выделением во вторичной цепи двигателя значительной электрической мощности скольжения Ps= sPэм, большая часть которой при реостатном регулировании теряется в реостате. Поэтому, естественно, возникает мысль о полезном использовании этой мощности и о повышении таким образом КПД установки.
Полезное использование мощности скольжения возможно, если вместо реостата присоединить к контактным кольцам ротора двигателя приемник электрической энергии в виде вспомогательной электрической машины. Эта машина должна работать в режиме двигателя, обеспечивая требуемое напряжение на своих зажимах (и соответственно на контактных кольцах самого асинхронного двигателя).
Поясним, как влияет на работу асинхронного двигателя введение добавочной ЭДС Eд в обмотку ротора, при условии, что частота Eд всегда равна частоте токов ротора f2 = sf1.
Пусть в отсутствие ЭДС Eд по цепи ротора протекает ток I2, определяемый в соответствии с формулой (25) как I2=sE2/(r2+jsx2). Этот ток, взаимодействуя с полем обмотки статора, создает электромагнитный момент М, численно равный моменту сопротивления нагрузки Мс, так что двигатель работает при некоторой частоте вращения n.
Если теперь во вторичную цепь ввести ЭДС Eд встречно ЭДС скольжения E2s в этой же цепи, то вторичный ток
(56)
в первый момент времени уменьшится. Поэтому развиваемый двигателем момент М также уменьшится, двигатель начнет тормозиться, а скольжение s увеличиваться. При этом согласно равенству (56) ток I2, а вместе с ним и момент М будут увеличиваться. Это будет происходить до тех пор, пока опять не наступит равновесие моментов на валу: М=Мс. Двигатель при этом будет работать с увеличенным скольжением s. Очевидно, что регулированием Eд можно регулировать s и, следовательно, частоту вращения двигателя.
Это будет происходить до тех пор, пока опять не наступит равновесие моментов на валу: М=Мс. Двигатель при этом будет работать с увеличенным скольжением s. Очевидно, что регулированием Eд можно регулировать s и, следовательно, частоту вращения двигателя.
Предположим теперь, что ЭДС Ед имеет по сравнению с рассмотренным случаем противоположное направление и совпадает по фазе с ЭДС sE2. Тогда вместо (56) получаем
(57)
В первый момент после введения ЭДС Eд ток I2 и момент М возрастут, асинхронный двигатель будет ускоряться и s будет уменьшаться. При достаточной величине Ед величина s уменьшится до нуля, и если ток I2, создаваемый в этом случае только за счет действия Eд, все еще будет велик по сравнению с током, необходимым для создания момента М=Mс, то ускорение двигателя будет продолжаться и скорость превысит синхронную. Скольжение s и ЭДС E2s при этом изменят знаки и будут расти по абсолютной величине до тех пор, пока в соответствии с выражением (57) ток не упадет до необходимой величины.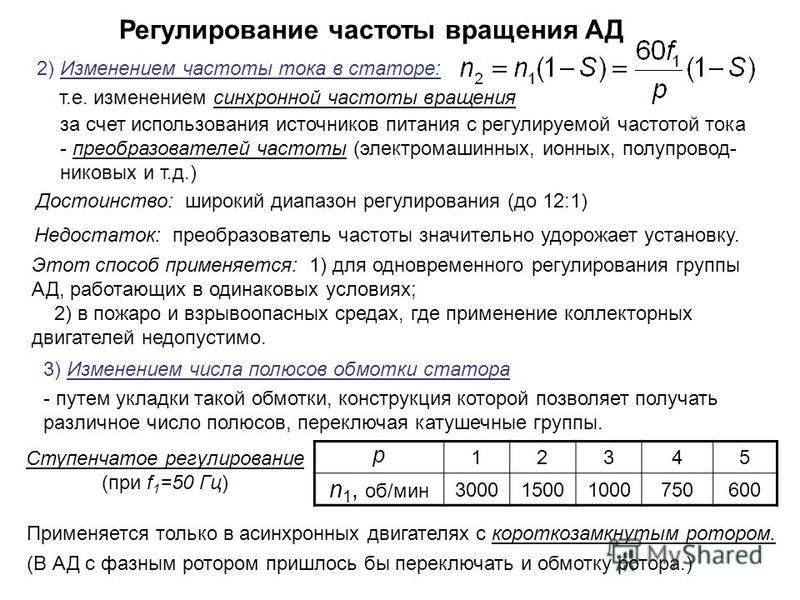 При s<0 угол отрицательный (см. векторную диаграмму вторичной цепи двигателя, показанную на рис. 18). Ток I2 при этом будет иметь составляющую, совпадающую с потоком Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos φ двигателя повысится.
При s<0 угол отрицательный (см. векторную диаграмму вторичной цепи двигателя, показанную на рис. 18). Ток I2 при этом будет иметь составляющую, совпадающую с потоком Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos φ двигателя повысится.
Таким образом, с помощью добавочной ЭДС Eд путем изменения ее значения и направления можно осуществить плавное двухзонное регулирование частоты вращения двигателя ниже и выше синхронной.
Реализация этого весьма экономичного способа регулирования частоты вращения сопряжена с усложнением схемы регулирования и требует применения электромеханического (электромашинного) или вентильного каскада для преобразования выделяемой при регулировании мощности потерь скольжения в полезную электрическую или механическую мощность. Каскадные установки выполняются на мощности до тысяч киловатт с диапазоном регулирования частоты вращения порядка 3 : 1.
РЕГУЛИРОВАНИЕ СКОРОСТИ ДВИГАТЕЛЕЙ | Wattco
Существует множество приборов, которые являются частью нашей жизни, от бытовых электроприборов, таких как пылесосы и фены, до насосов, конвейерных лент и станков на крупных промышленных предприятиях.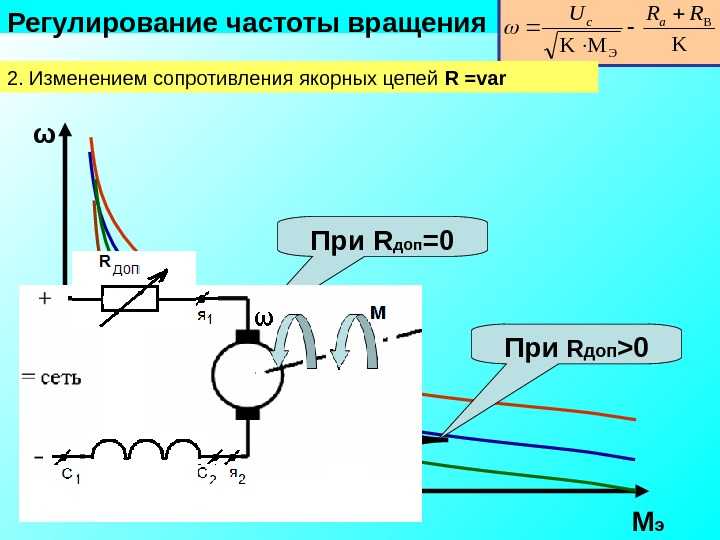 Везде, где в каких-либо машинах используются электродвигатели, некоторый тип управления скоростью двигателя неизменно является частью этой машины.
Везде, где в каких-либо машинах используются электродвигатели, некоторый тип управления скоростью двигателя неизменно является частью этой машины.
Регулятор скорости двигателей переменного тока
Асинхронный двигатель переменного тока по существу представляет собой устройство с постоянной скоростью. Скорость вращающегося магнитного поля называется синхронной скоростью. Синхронная скорость (S) двигателя определяется как S = 120(F) ÷ P, где (F) — частота входящей сети, а (P) — число полюсов в двигателе.
Поскольку в США частота сети переменного тока составляет 60 Гц при напряжении 120 В, поэтому асинхронный двигатель переменного тока с четырьмя полюсами будет иметь синхронную скорость 1800 об/мин. Однако в полевых условиях, когда к двигателю приложена нагрузка, он будет работать со скоростью менее 1800 об/мин. Эта разница в скорости называется скольжением и обычно выражается в процентах. Поскольку количество полюсов в машине фиксировано, единственная переменная, которую остается изменить, — это частота входящей линии — это основа работы регулятора скорости двигателя, известного как частотно-регулируемый привод (VFD).
ЧРП выполняет две функции: во-первых, он преобразует входящий сигнал переменного тока в сигнал постоянного тока путем выпрямления; во-вторых, он инвертирует выпрямленный сигнал постоянного тока обратно в сигнал переменного тока переменной частоты.
Скорость двигателя постоянного тока может изменяться за счет увеличения или уменьшения приложенного напряжения. Это не относится к двигателю переменного тока. Асинхронный двигатель переменного тока выйдет из строя, если входное напряжение питания значительно изменится.
Контроллер скорости двигателя переменного тока
Контроллер переменного тока, контролирующий скорость двигателя переменного тока, также называется частотно-регулируемым приводом (VFD), преобразователем частоты (ASD) и преобразователем частоты (FC). Двигатель переменного тока получает питание с переменной частотой, генерируемой контроллером переменного тока. Этот регулируемый выход позволяет точно контролировать скорость двигателя.
Компоненты регулятора скорости переменного тока
Регулятор скорости переменного тока состоит из трех основных компонентов:
- Выпрямитель
- Инвертор
- Звено постоянного тока
Входной переменный ток преобразуется в постоянный с помощью выпрямителя. Инвертор преобразует постоянное напряжение обратно в переменное на выходе с желаемой частотой.
Инвертор преобразует постоянное напряжение обратно в переменное на выходе с желаемой частотой.
Типы частотно-регулируемых приводов
Преобразователи частоты (ЧРП) бывают трех основных типов:
- Инвертор источника тока (CSI)
- Инвертор источника напряжения (VSI)
- Широтно-импульсная модуляция (ШИМ).
Секции частотно-регулируемого привода включают преобразователь, промежуточный контур и инвертор.
Инвертор источника тока (CSI)
Инвертор источника тока (CSI) преобразует входящее напряжение переменного тока, а также регулирует частоту и напряжение, подаваемые на асинхронный двигатель переменного тока. CSI преобразует входящее переменное напряжение в переменное постоянное напряжение, используя:
- Кремниевые управляемые выпрямители (SCR)
- Тиристоры с коммутацией затвора (GCT)
- Симметричные тиристоры с затвором (SGCT)
Преобразователь напряжения (VSI)
Преобразование преобразователя напряжения (VSI) аналогично функции CSI – преобразование входящего переменного напряжения в постоянное. Разница в том, что VSI использует диодный мостовой выпрямитель для достижения преобразования. В мосте используются конденсаторы для поддержания постоянного напряжения постоянного тока, а также для хранения энергии для системы привода.
Разница в том, что VSI использует диодный мостовой выпрямитель для достижения преобразования. В мосте используются конденсаторы для поддержания постоянного напряжения постоянного тока, а также для хранения энергии для системы привода.
В секции инвертора используются транзисторы и тиристоры многих типов, которые действуют как переключатели для создания выходного сигнала широтно-импульсной модуляции (ШИМ) для управления частотой и напряжением, подаваемым на двигатель.
Широтно-импульсная модуляция (ШИМ)
В широтно-импульсной модуляции (ШИМ) используется диодный мостовой выпрямитель, подобный VSI, преобразующий входящее переменное напряжение в постоянное. Пульсации, генерируемые выпрямителем, сглаживаются большими конденсаторами в звене постоянного тока. Это обеспечивает стабильное напряжение на шине постоянного тока.
Биполярные транзисторы с изолированным затвором (БТИЗ) высокой мощности используются в каскаде многоступенчатого инвертора драйвера для включения и выключения для управления как частотой, так и напряжением, подаваемым на двигатель в виде синусоидального выходного сигнала. Изменение ширины импульса напряжения приводит к среднему напряжению мощности, которое подается на двигатель. Количество переходов формы сигнала в секунду определяет частоту, необходимую двигателю.
Изменение ширины импульса напряжения приводит к среднему напряжению мощности, которое подается на двигатель. Количество переходов формы сигнала в секунду определяет частоту, необходимую двигателю.
Регулирование скорости двигателей постоянного тока
Двигатели постоянного тока используются в приложениях с точным регулированием скорости из-за их способности довольно легко и эффективно обеспечивать вращение от положения останова до полной скорости. Управление скоростью последовательного двигателя постоянного тока, когда поле включено последовательно с якорем, осуществляется путем увеличения или уменьшения приложенного к цепи напряжения.
В шунтирующем двигателе постоянного тока, где поле параллельно якорю, скорость регулируется увеличением или уменьшением приложенного к якорю напряжения с помощью реостата.
Вместо реостатов теперь используются кремниевые управляемые выпрямители (SCR), поскольку они могут работать с большим количеством энергии без проблем с рассеиванием тепла. Кроме того, SCR намного меньше по размеру и легко взаимодействуют с программируемыми логическими контроллерами (ПЛК).
Кроме того, SCR намного меньше по размеру и легко взаимодействуют с программируемыми логическими контроллерами (ПЛК).
Управление потоком
Скоростью двигателя постоянного тока можно управлять, изменяя прилагаемый к нему поток, поскольку скорость двигателя обратно пропорциональна потоку на полюс. Для управления потоком последовательно с обмоткой возбуждения добавляют переменный резистор или реостат. Увеличение сопротивления увеличит скорость, так как уменьшит поток. В шунтовых двигателях ток возбуждения очень мал, поэтому этот метод работает достаточно эффективно. Управление потоком является простым и удобным методом управления скоростью, так как потери мощности невелики из-за малого тока шунтирующего поля.
Управление якорем
Скорость двигателя постоянного тока прямо пропорциональна противо-ЭДС. Это означает, что при постоянном напряжении питания и сопротивлении якоря скорость прямо пропорциональна току якоря. Таким образом, если добавить сопротивление последовательно с якорем, ток уменьшится, а значит, уменьшится и скорость. Чем больше сопротивление последовательно с якорем, тем больше падение скорости. В методе управления якорем теряется большое количество энергии, и это полезно для небольших двигателей.
Чем больше сопротивление последовательно с якорем, тем больше падение скорости. В методе управления якорем теряется большое количество энергии, и это полезно для небольших двигателей.
Управление напряжением
Управление несколькими напряжениями
На шунтирующее поле подается фиксированное возбуждающее напряжение, но на якорь подаются различные напряжения. Это напряжение на якоре контролируется соответствующим распределительным устройством, а скорость двигателя обычно пропорциональна напряжению на якоре.
Система Ward-Leonard
Система управления скоростью вращения двигателей постоянного тока Ward-Leonard используется там, где требуется очень точное управление скоростью двигателя. В этом методе выходной сигнал генератора подается на якорь двигателя, скорость которого необходимо контролировать. Выходное напряжение генератора можно изменять с помощью регулятора поля от нуля до максимального значения, тем самым плавно изменяя напряжение якоря, что приводит к очень плавному управлению скоростью двигателя постоянного тока.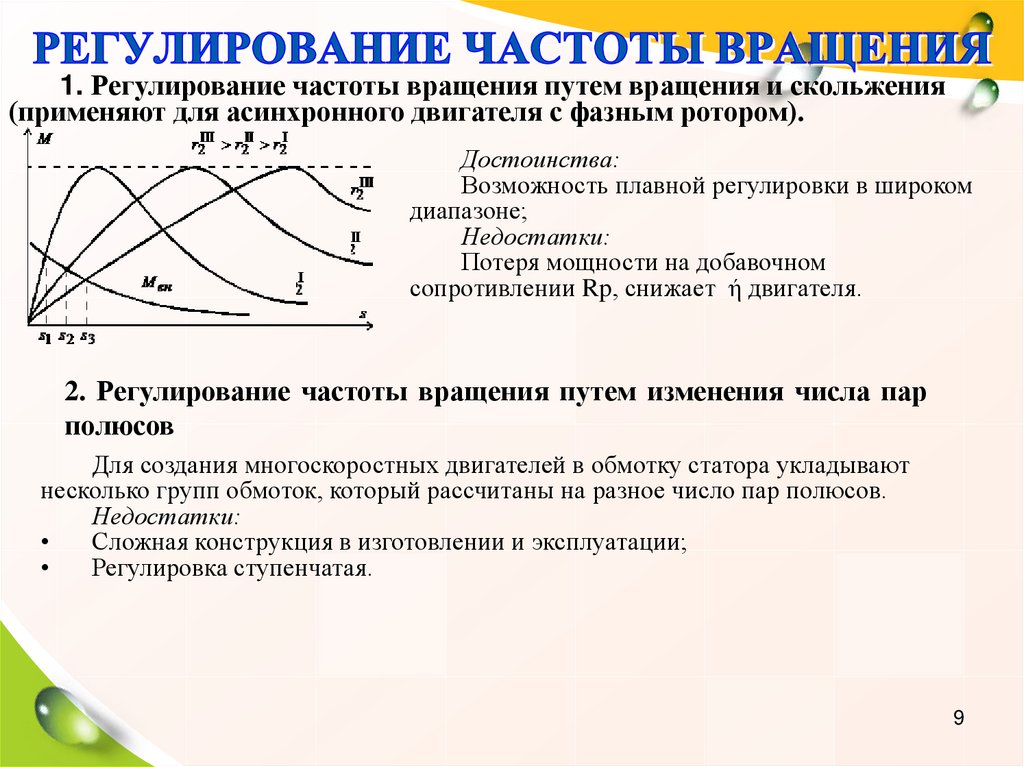
Электрические машины — асинхронные машины
Изменение скорости асинхронного двигателя
Машины с клеточным ротором
Анализ кривой скорости крутящего момента асинхронной машины показывает, что асинхронный двигатель найдет устойчивую равновесную рабочую точку на скорости между тяговой и синхронной скоростью. Для типичных двигателей класса B расчетное рабочее скольжение составляет менее 0,05. Хотя асинхронные машины могут работать в состоянии покоя, нормальный диапазон рабочих скоростей находится в небольшом диапазоне проскальзывания чуть ниже синхронной скорости. Чтобы изменить скорость асинхронной машины, синхронная скорость должна измениться. С
\[
n_s=\frac{120p}{f}
\]
есть два варианта: изменить количество полюсов или изменить частоту питания.
Замена полюсов
Изменение количества полюсов в машине дает набор дискретных рабочих скоростей. например если машина может иметь 2 или 6 полюсов, она может работать со скоростью примерно 1200 об/мин или 3600 об/мин (при частоте питания 60 Гц). Изменение количества полюсов может быть выполнено либо путем использования резервных обмоток статора и переключения между обмотками (что является дорогостоящим), либо путем повторного подключения катушек для изменения ориентации проводников для изменения количества магнитных полюсов. Смена полюсов не очень распространена в трехфазных машинах, и в основном ее заменяют источниками переменной частоты. Одно из наиболее распространенных применений двигателей с переключением полюсов было в традиционных стиральных машинах с вертикальной загрузкой для переключения между циклами стирки и отжима.
Изменение количества полюсов может быть выполнено либо путем использования резервных обмоток статора и переключения между обмотками (что является дорогостоящим), либо путем повторного подключения катушек для изменения ориентации проводников для изменения количества магнитных полюсов. Смена полюсов не очень распространена в трехфазных машинах, и в основном ее заменяют источниками переменной частоты. Одно из наиболее распространенных применений двигателей с переключением полюсов было в традиционных стиральных машинах с вертикальной загрузкой для переключения между циклами стирки и отжима.
Блок питания переменной частоты
Если доступен источник переменной частоты, синхронная скорость
индукционная машина теоретически может быть установлена на любое желаемое значение. Однако существуют практические и безопасные ограничения, ограничивающие работу. При работе с переменной частотой нам обычно интересно понять, как управлять машиной, чтобы обеспечить требуемый крутящий момент на определенной частоте.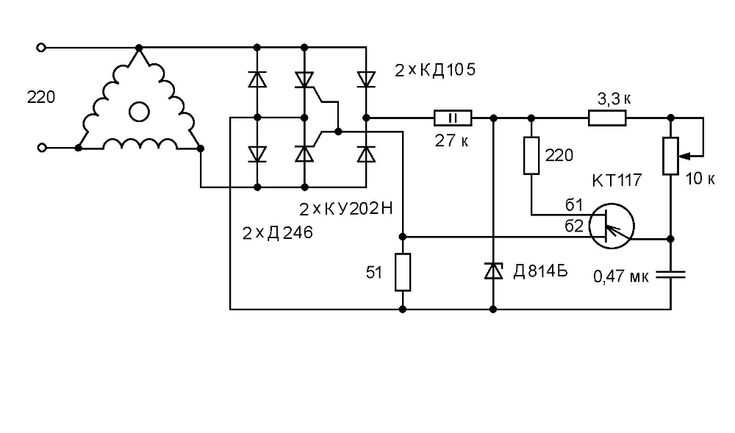 До сих пор мы рассчитывали отношения крутящий момент-скорость при одной частоте питания, теперь нам нужно подумать о том, как изменяется крутящий момент при изменении частоты. 92R_2}{с\омега_с}
До сих пор мы рассчитывали отношения крутящий момент-скорость при одной частоте питания, теперь нам нужно подумать о том, как изменяется крутящий момент при изменении частоты. 92R_2}{с\омега_с}
\]
Если напряжение на ветви ротора определяется как \(V_2\), то
\[
I_2=\frac{V_2}{\frac{R_2}{s}+j\omega_e L_2}
\]
Первое предположение при анализе работы привода с регулируемой скоростью состоит в том, что в установившемся режиме машина будет работать при малых значениях, и поэтому разумно сказать, что
\[
\frac{R_2}{s} \gg \omega_e L_2\textrm{ , } \quad R_2 \gg s\omega_e L_2
\]
Следовательно: 92 \ гидроразрыва {\ omega_ {sl}} {R_2}
\end{выровнено}
\]
Этот последний шаг показывает, что при определенных условиях создаваемый крутящий момент пропорционален частоте скольжения.
На самом деле, если соотношение \(\frac{V_2}{\omega_e}\) постоянно, крутящий момент будет пропорционален частоте скольжения. Рассмотрим другой подход к определению \(V_2\):
\[
V_2=j \omega_e L_m I_m
\]
и
\[
\начать{выравнивать*}
\влево| \frac{V_2}{\omega_e} \right| & = L_m I_m \\
\влево| \frac{V_2}{\omega_e} \right| & = \лямбда
\конец{выравнивание*}
\] 92 сн_с
\]
Рабочие области
Скорость ниже номинальной — область постоянного потока
Если мы хотим эксплуатировать асинхронную машину со скоростью ниже номинальной, то можно достичь полного крутящего момента, если поддерживать номинальный поток. Учитывая, что поток определяется зависимостью напряжения от частоты, для большей части рабочего диапазона скорости ниже номинальной скорости (частота вращения, указанная на паспортной табличке, т. е. при питании 60 Гц или 50 Гц), номинальный поток можно получить, сохраняя отношение напряжения к частоте постоянным. (По сути, если предположить, что константа \(\frac{V_1}{f}\) константа дает константу \(\frac{V_2}{f}\) .) Это называется постоянной операцией Вольт на Герц. Однако, если машина работает на низких частотах (например, менее 1/4 номинальной),
Учитывая, что поток определяется зависимостью напряжения от частоты, для большей части рабочего диапазона скорости ниже номинальной скорости (частота вращения, указанная на паспортной табличке, т. е. при питании 60 Гц или 50 Гц), номинальный поток можно получить, сохраняя отношение напряжения к частоте постоянным. (По сути, если предположить, что константа \(\frac{V_1}{f}\) константа дает константу \(\frac{V_2}{f}\) .) Это называется постоянной операцией Вольт на Герц. Однако, если машина работает на низких частотах (например, менее 1/4 номинальной),
падение напряжения на сопротивлении статора будет значительным. (Поскольку реактивные сопротивления становятся меньше,
р 1 становится пропорционально больше.) На низких частотах питание статора
напряжение должно быть компенсировано, чтобы обеспечить дополнительное падение напряжения на сопротивлении статора, в противном случае
крутящий момент упадет.
Скорость выше номинальной — область ослабления поля
Если машина должна работать на частоте выше номинальной, напряжение не может
будет увеличено выше номинального напряжения, и ток намагничивания в машине будет уменьшен. Этот
Этот
режим работы называется режимом ослабления поля.
Резюме
- При частоте ниже номинальной сохраняйте соотношение V/f постоянным при номинальных значениях.
- На низких частотах отношение V/f должно быть увеличено, чтобы поддерживать
номинальный крутящий момент. - Частота выше номинальной, поддерживайте номинальное напряжение.
Приведенные выше утверждения могут быть использованы в качестве основы для относительно простого управления скоростью без обратной связи. Это обычно называется управлением V/f с разомкнутым контуром.
Пример
Четырехполюсный двигатель 480 В, 60 Гц имеет номинальную скорость 1750 об/мин и номинальный крутящий момент 10 Нм. Если
нужен крутящий момент 10 Нм при механической скорости 1500 об/мин, найти синхронную скорость, частоту питания
и линейное напряжение питания.
При номинальном крутящем моменте скорость скольжения будет равна номинальному значению. Для 4-полюсной машины 60 Гц,
синхронная скорость 1800 об/мин, поэтому номинальная скорость скольжения =1800-1750=50 об/мин. При работе на
При работе на
1500 об/мин, 10 Нм, скорость скольжения по-прежнему будет 50 об/мин, а синхронная скорость задается
\[
\начать{выравнивать*}
n_s&=n_m+sn_s\
н_с & = 1500 + 50
\конец{выравнивание*}
\]
При синхронной скорости можно найти частоту сети
\[
\начать{выравнивать*}
n_s & = \frac{120 f_e}{p} \\
f_e & = \frac{n_s p}{120} = \frac{1550 \times 4}{120} \\
f_e & = 51,67 Гц
\конец{выравнивание*}
\]
Наконец, если V/f постоянно, напряжение питания должно быть:
\[
\начать{выравнивать*}
V_{{LL}_{новый}} & = 51,67 \frac{480}{60} \\
V_{{LL}_{новый}} & = 413,3 В
\конец{выравнивание*}
\]
Источник переменного напряжения и переменной частоты
Большинство современных приводов используют источники питания с широтно-импульсной модуляцией (ШИМ) для аппроксимации переменного напряжения и частоты.
синусоидальное питание. В источнике ШИМ напряжение постоянного тока быстро переключается, чтобы приблизиться к форме желаемой формы волны. В простейшей для понимания реализации желаемое (модулирующее) напряжение сравнивается с треугольной формой несущей волны. Если форма модулирующего сигнала на единицу больше, чем форма несущей на единицу, выход подключается к положительной клемме источника постоянного тока. Если форма модулирующего сигнала на единицу меньше, чем форма несущей на единицу, выход подключается к отрицательной клемме звена постоянного тока. Это показано на рис. 2 для случая, когда напряжения в звене постоянного тока определены как +VDC и 0V.
Если форма модулирующего сигнала на единицу больше, чем форма несущей на единицу, выход подключается к положительной клемме источника постоянного тока. Если форма модулирующего сигнала на единицу меньше, чем форма несущей на единицу, выход подключается к отрицательной клемме звена постоянного тока. Это показано на рис. 2 для случая, когда напряжения в звене постоянного тока определены как +VDC и 0V.
Рис. 2. Интерактивный график напряжений ШИМ для двух фаз трехфазной сети. В этой анимации несущая частота ограничена как минимум 11-кратной частотой модуляции.
Роторные машины для намотки
Если ротор асинхронной машины выполнен с полной трехфазной обмоткой, к которой можно получить доступ через токосъемные кольца, скорость машины можно регулировать, регулируя цепь ротора, в то время как
напряжение питания статора и частота остаются постоянными.
Рассмотрим эквивалентную схему асинхронной машины с фазным ротором, когда
цепь ротора не относится к статору, показанному на рис.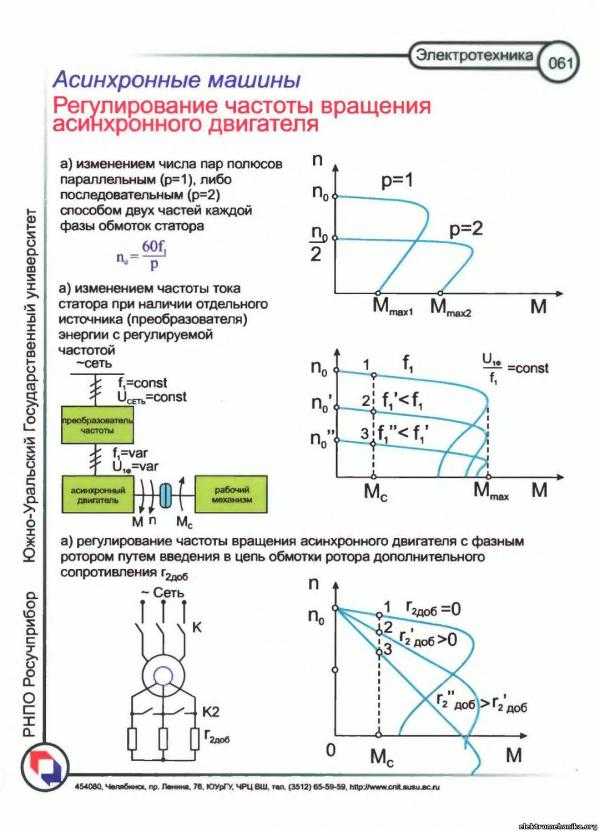 3.
3.
Индуцированное напряжение ротора \(E_R\) является функцией скольжения и частоты фактических цепей ротора (и величины \(X_R\)) также является функцией скольжения, как описано при разработке модели пофазной эквивалентной схемы. Однако в асинхронной машине с фазным ротором эффективное соотношение оборотов в состоянии покоя \(a_{eff}\) фактически известно. Его можно определить, измерив напряжение на клеммах ротора холостого хода, когда ротор неподвижен. Как и в процессе разработки традиционной модели пофазной эквивалентной схемы, компоненты ротора могут быть отнесены к стороне статора (первичной) трансформатора с делением на скольжение, чтобы учесть изменение индуцированных напряжений ротора при изменении скорости, как показано на рис. Рис. 4.
Фазное напряжение на клеммах ротора, относящееся к статору, можно рассматривать как напряжение, подаваемое в цепь ротора, и определяется как:
\[
V_i=a_{eff} V_R
\]
Рис. 3. WRIM с ротором в качестве вторичного контураРис. 4. WRIM на фазную цепь в установившемся режиме
4. WRIM на фазную цепь в установившемся режиме
Принцип действия и анализ
С учетом эквивалентной схемы, если подаваемое напряжение увеличивается, ток ротора будет уменьшаться, что приводит к уменьшению доступного крутящего момента, генерируемого двигателем. Если к двигателю приложена нагрузка, ротор замедлится, что приведет к увеличению скольжения. Учитывая модель схемы с использованием трансформатора между статором и ротором, по мере увеличения скольжения индуцированное напряжение ротора \(E_R\) увеличивается, а ток ротора \(I_R\) будет увеличиваться. Это представляет то, что физически происходит в машине. В модели схемы с переменными ротора, относящимися к статору, ток ротора, относящийся к статору \(I_2\), увеличивается по мере того, как эффективное инжектируемое напряжение, воспринимаемое статором \(V_i/s\), уменьшается по мере увеличения скольжения. Этот процесс позволяет машине найти новое устойчивое состояние, при котором индуцированный ток ротора создает достаточный крутящий момент, равный крутящему моменту нагрузки. {\ гидроразрыва {1} {2}}
{\ гидроразрыва {1} {2}}
\end{выровнено}
\] 9\frac{1}{2} — I_2 R_{TH}
\end{выровнено}
\]
Мощность и крутящий момент
Принимая во внимание приведенную выше диаграмму и помня, что подаваемое напряжение находится в фазе с током ротора, мощность воздушного зазора машины (полный поток мощности от статора к ротору) может быть записана как:
\[
P_{пробел}=3I_2\frac{V_i + I_2 R_2} {s}
\]
Учитывая, что для всех асинхронных машин
\[
\ тау = \ гидроразрыва {P_ {разрыв}} {\ omega_s}
\]
крутящий момент может быть записан как 9\frac{1}{2} — I_2 R_{TH}\right)
\end{выровнено}
\]
Первое из двух приведенных выше уравнений дает крутящий момент как функцию скольжения, тока ротора и подаваемого напряжения ротора. Второе уравнение показывает, что при заданном крутящем моменте ток ротора \(I_2\) должен быть постоянным. В свою очередь, это означает, что при постоянном крутящем моменте отношение
\[
\frac{V_i + I_2 R_2} {s} \rightarrow \textbf{константа}
\]
Наконец, рассмотрим компоненты потока мощности мощности воздушного зазора. Мощность воздушного зазора представляет собой сумму мощности, потерянной в цепи ротора, потока мощности, выходящего из вывода ротора, и мощности, преобразованной в механическую энергию. Поскольку предполагается, что подаваемое напряжение находится в фазе с током ротора, мощность на клеммах ротора будет просто \(3 V_i I_2\). Компоненты мощности воздушного зазора: 9\frac{1}{2} — I_2 R_{TH}}
Мощность воздушного зазора представляет собой сумму мощности, потерянной в цепи ротора, потока мощности, выходящего из вывода ротора, и мощности, преобразованной в механическую энергию. Поскольку предполагается, что подаваемое напряжение находится в фазе с током ротора, мощность на клеммах ротора будет просто \(3 V_i I_2\). Компоненты мощности воздушного зазора: 9\frac{1}{2} — I_2 R_{TH}}
\]
Если крутящий момент равен нулю, то ток ротора также будет равен нулю. Следовательно, при нулевом крутящем моменте
проскальзывание без нагрузки, \(s_0\), определяется как
\[
s_0 = \frac{V_i}{V_{TH}}
\]
КПД
Поскольку часть мощности, подаваемой на двигатель, рекуперируется из цепи ротора,
КПД нельзя рассчитать просто как выходную мощность над входной мощностью статора. Вместо этого в машине с фазным ротором с источником переменного напряжения и частоты, подключенным к ротору, КПД составляет
\[
\eta= \frac{P_{выход}}{P_{статор}-P_{ротор}}
\]
где \(P_{stator}\) и \(P_{rotor}\) — потоки мощности на клеммах статора и ротора соответственно.
Режимы работы асинхронной машины с фазным ротором
Как отмечалось выше, крутящий момент может быть записан как:
\[
\tau = 3I_2\frac{V_i + I_2 R_2} {s \omega_s}
\]
В двигателе крутящий момент положителен. Поэтому для любого заданного положительного крутящего момента, когда мы регулируем скорость, скольжение изменяется и \(I_2\) останется постоянным. Для двигателя, независимо от скольжения,
\[
\frac{V_i + I_2 R_2} {s} \gt 0
\]
Точно так же для генератора крутящий момент отрицателен. Независимо от скорости
\[
\frac{V_i + I_2 R_2} {s} \lt 0
\]
- Подсинхронный двигатель
В этом режиме скольжение и крутящий момент положительны, поэтому подаваемое напряжение должно быть в фазе с током ротора. Энергия поступает в статор и обратно из цепи ротора.
\[
s \gt 0 \mspace{24mu} \frac{V_i + I_2 R_2} {s} \gt 0 \mspace{12mu} \rightarrow \mspace{12mu} \ V_i + I_2 R_2 \gt 0
\] - Суперсинхронный двигатель
Скорость выше синхронной, скольжение отрицательное.
Чтобы крутящий момент был положительным,\[
s \lt 0 \mspace{24mu} \frac{V_i + I_2 R_2} {s} \gt 0\mspace{12mu} \rightarrow \mspace{12mu} \ V_i + I_2 R_2 \lt 0
\]Следовательно, напряжение и ток должны быть не в фазе друг с другом. Мощность вводится в
ротор от цепи привода подключен к токосъемным кольцам, помимо входной мощности, поступающей в статор - Суперсинхронная генерация
При генерации выше синхронной скорости скольжение и крутящий момент отрицательны, поэтому
\[
s \lt 0 \mspace{24mu} \frac{V_i + I_2 R_2} {s} \lt 0\mspace{12mu} \rightarrow \mspace{12mu} \ V_i + I_2 R_2 \gt 0
\]Подаваемое напряжение совпадает по фазе с током ротора. В этом случае механический ввод
мощность подается с вала, и обе цепи статора и ротора обеспечивают выходную мощность. - Подсинхронная генерация
Если требуется генерация ниже синхронной скорости, крутящий момент должен быть отрицательным, а скольжение положительным. Опять же,
\[
s \gt 0 \mspace{24mu} \frac{V_i + I_2 R_2} {s} \lt 0\mspace{12mu} \rightarrow \mspace{12mu} \ V_i + I_2 R_2 \lt 0
\]Следовательно, напряжение и ток должны быть не в фазе друг с другом.
Мощность вводится в
ротор от цепи привода соединен с контактными кольцами.
 Чтобы крутящий момент был положительным,
Чтобы крутящий момент был положительным,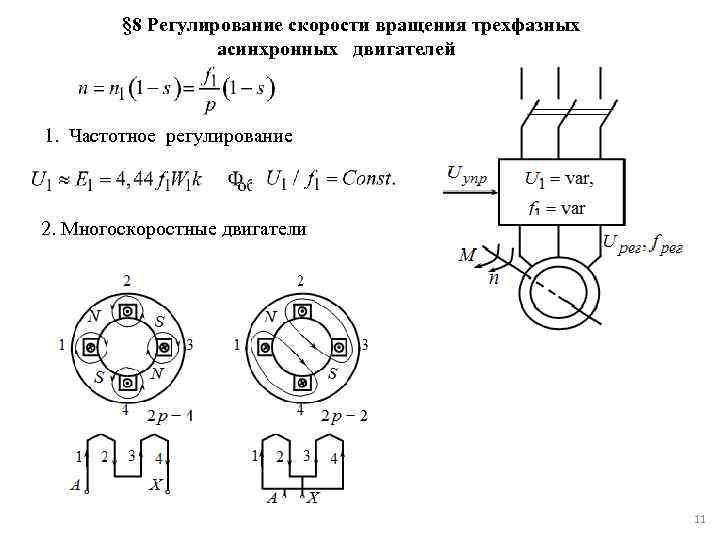 Мощность вводится в
Мощность вводится вКомментарий
В современной реализации управления приводом для асинхронной машины с фазным ротором приведенный выше анализ применим, если напряжение на клеммах ротора поддерживается в фазе с током ротора. Также возможно управлять работой машины, вводя реактивную мощность через клеммы ротора, уменьшая потребность в реактивной мощности обмотки статора. (Эффективно можно использовать клеммы ротора для обеспечения тока намагничивания). Реализация управления фазовым углом напряжения ротора является относительно сложной задачей, которая выходит за рамки этих заметок.
Асинхронные машины с фазным ротором способны работать до номинального крутящего момента при проскальзывании, не близком к синхронной скорости. При подаче напряжения в цепь ротора кривая скорости вращения смещается так, что скорость холостого хода не соответствует синхронной скорости. WRIM способны к субсинхронной генерации и суперсинхронному двигателю.