Содержание
Регулирование скорости асинхронного двигателя
Асинхронный двигатель
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
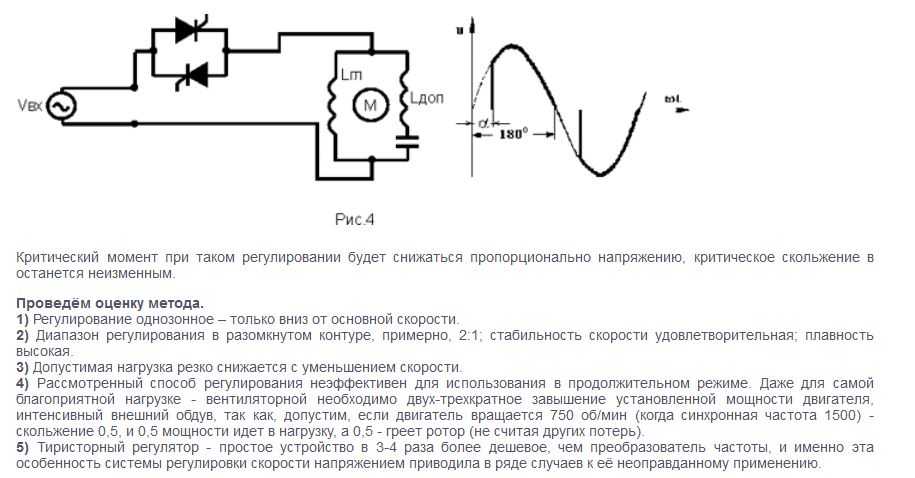
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.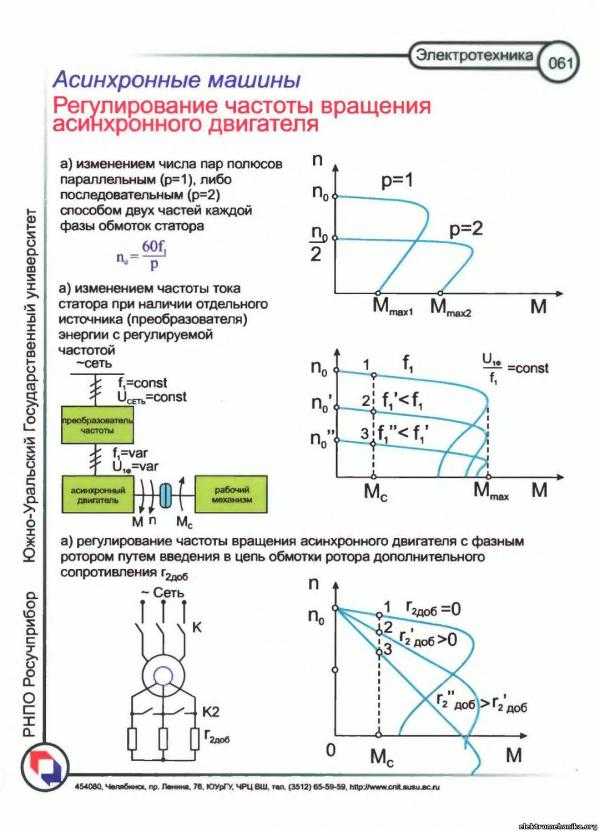
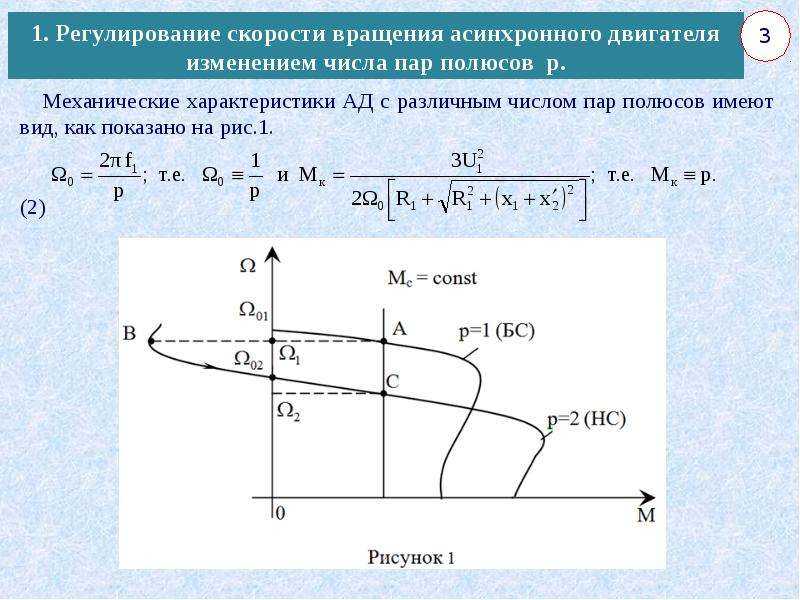
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда — звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Читайте также — Торможение асинхронного двигателя
Как можно регулировать обороты асинхронного двигателя: обзор способов
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя.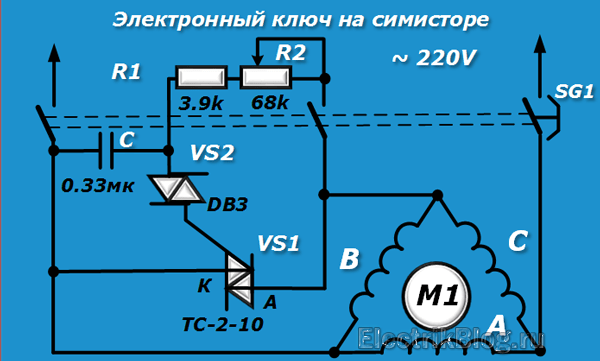 Электрическое управление производится за счет:
Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
- Изменение скорости АД с короткозамкнутым ротором
- Частотное регулирование
- Переключение числа пар полюсов
- Способы управления скоростью АД с фазным ротором
- Изменение питающего напряжения
- Активное сопротивление в цепи ротора
- Асинхронный вентильный каскад и машины двойного питания
- Плавный пуск асинхронных электродвигателей
- Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.


- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
U1=4,44w1k1fΦ
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
U1/f1=U’1/f’1
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
Недостатки:
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения.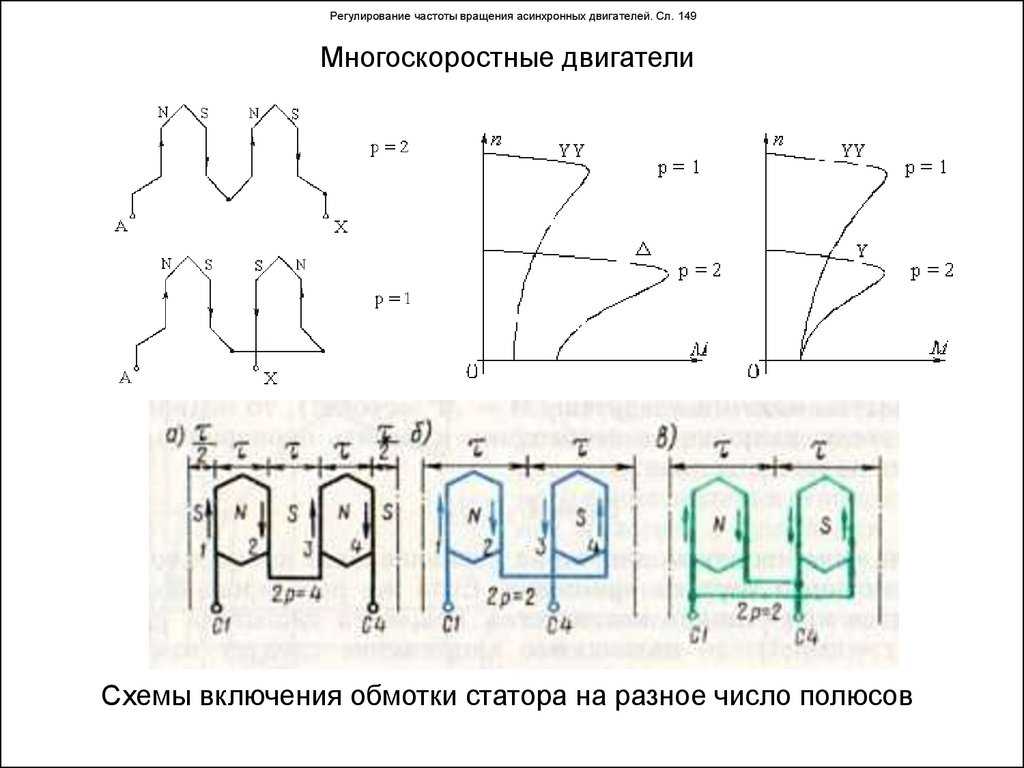 Рассмотрим основные варианты и способы.
Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
Достоинства:
- большой диапазон регулирования в сторону понижения скорости вращения.

Недостатки:
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.

В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Материалы по теме:
- Как подключить трехфазный двигатель на 220 и 380 Вольт
- Типовые схемы и способы пуска синхронных двигателей
- 5 схем сборки самодельного светорегулятора
- Как выбрать диммер
Опубликовано 16. 08.2019 Обновлено 17.06.2021 Пользователем Александр (администратор)
08.2019 Обновлено 17.06.2021 Пользователем Александр (администратор)
Управление скоростью асинхронного двигателя — MATLAB и Simulink
Разработка и развертывание алгоритмов управления скоростью асинхронного двигателя с использованием Simulink
Управление скоростью асинхронного двигателя — это процесс управления токами в асинхронном двигателе для регулирования скорости. Хотя асинхронные двигатели часто используются в приложениях с фиксированной частотой, они популярны для приложений с переменной частотой, таких как промышленные приводы и электромобили. Для работы с переменной частотой инвертор модулирует ток в обмотках статора.
К сожалению, ваш браузер не поддерживает встроенные видео.
Скольжение и результирующий крутящий момент для асинхронного двигателя
Условные обозначения:
Желтая стрелка – результирующий крутящий момент
Пурпурная стрелка – вращающееся магнитное поле статора связь магнитных полей в статоре и роторе.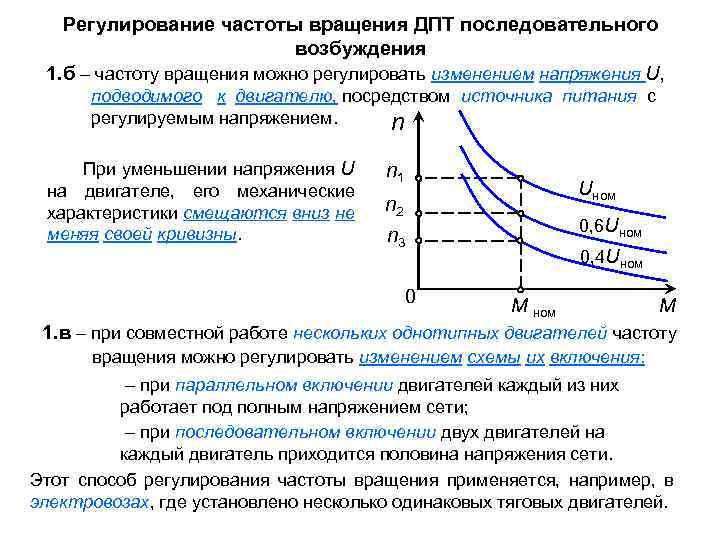 Токи в статоре создают вращающееся магнитное поле, которое индуцирует токи и отстающее магнитное поле в роторе. Взаимодействие магнитного поля заставляет ротор вращаться с угловой скоростью, меньшей, чем скорость вращения поля статора. Эта задержка вращения, называемая проскальзыванием, создает крутящий момент на валу двигателя. Увеличение нагрузки на двигатель увеличивает скольжение и выходной крутящий момент двигателя.
Токи в статоре создают вращающееся магнитное поле, которое индуцирует токи и отстающее магнитное поле в роторе. Взаимодействие магнитного поля заставляет ротор вращаться с угловой скоростью, меньшей, чем скорость вращения поля статора. Эта задержка вращения, называемая проскальзыванием, создает крутящий момент на валу двигателя. Увеличение нагрузки на двигатель увеличивает скольжение и выходной крутящий момент двигателя.
Для асинхронного двигателя с короткозамкнутым ротором регулирование скорости с помощью управления с ориентацией поля (FOC) регулирует I d и I q таким образом, что поток пропорционален I d , а крутящий момент пропорционален I д . Такой подход увеличивает диапазон скоростей и улучшает как динамические, так и установившиеся характеристики. Simulink ® позволяет использовать многоскоростное моделирование для разработки, настройки и проверки алгоритмов FOC во всем рабочем диапазоне двигателя перед тестированием оборудования.
Эта диаграмма Simulink иллюстрирует типичный алгоритм FOC для управления скоростью трехфазного асинхронного двигателя с короткозамкнутым ротором.
Алгоритм FOC для управления скоростью асинхронного двигателя.
Основные компоненты стратегий управления асинхронными двигателями Включают:
- Внутренний контур (пропорционально-интегральный или PI)
- Управление током по оси Q: регулирует ток по оси q для управления электрическим крутящим моментом, приложенным к двигателю
- Управление током по оси D: для управления ослаблением поля регулирует ток, чтобы уменьшить поток по оси d и позволить двигателю вращаться со скоростью выше базовой за счет крутящего момента
- Внешний контур (PI) : Контур управления скоростью асинхронного двигателя. Этот контур имеет более низкую частоту дискретизации по сравнению с внутренним контуром (управление током) и генерирует заданное значение крутящего момента. Заданное значение обрабатывается для создания опорного тока по осям d и q для внутреннего контура
- Преобразования Clarke, Park и Inverse Park : преобразование между стационарной и вращающейся синхронной рамой
- Оценка скорости скольжения : Поскольку асинхронные двигатели являются асинхронными, скольжение между частотой статора и ротора оценивается для расчета синхронной скорости и положения ротора
- Пространственно-векторная модуляция (SVM) : Генерирует модулированные импульсы для управления переключателями силовой электроники в инверторе
- Датчик скорости : Скорость асинхронного двигателя можно измерить с помощью квадратурного энкодера или другого датчика. Для бездатчикового управления асинхронным двигателем алгоритм на основе наблюдателя заменяет физический датчик и оценивает скорость двигателя в режиме реального времени.
.
Simscape Electrical™ и Motor Control Blockset™ предоставляют асинхронный двигатель и примеры управления, ориентированного на поле, для разработки имитационной модели для управления скоростью асинхронного двигателя. Моделирование управления скоростью асинхронного двигателя с помощью Simulink помогает сократить время тестирования прототипа и позволяет проверить устойчивость алгоритмов управления к неисправностям, которые нецелесообразно тестировать на оборудовании.
Моделирование управления скоростью асинхронного двигателя с помощью Simulink помогает сократить время тестирования прототипа и позволяет проверить устойчивость алгоритмов управления к неисправностям, которые нецелесообразно тестировать на оборудовании.
Используя Simscape Electrical and Motor Control Blockset, инженеры по управлению двигателем разрабатывают управление скоростью асинхронного двигателя:
- Моделирование асинхронных двигателей, инверторов и регуляторов скорости и тока
- Автонастройка усиления контура управления скоростью асинхронного двигателя с использованием методов проектирования управления
- Разработка алгоритмов наблюдения для оценки положения и скорости ротора.
- Моделирование режимов запуска, выключения и ошибок, а также разработка логики снижения номинальных характеристик и защиты для обеспечения безопасной работы
- Запуск моделирования двигателя и контроллера с обратной связью для проверки производительности системы в нормальных и нештатных режимах работы
- Генерация ANSI, ISO или оптимизированного для процессора кода C и HDL из модели для быстрого прототипирования, аппаратного тестирования в цикле и внедрения в производство
Поле-ориентированное управление асинхронными двигателями с помощью Simulink и набора блоков управления двигателем.
5:34
Продолжительность видео 5:34.
Поле-ориентированное управление асинхронными двигателями с помощью Simulink и блока управления двигателем
Поле-ориентированное управление асинхронными двигателями с помощью Simulink.
3 видео
Поле-ориентированное управление асинхронными двигателями с помощью Simulink (3 видео)
Как много вы знаете о конструкции управления силовой электроникой?
Начать тест
Примеры и инструкции
Ориентированное на поле управление асинхронными двигателями с помощью Simulink и блока управления двигателем (5:34)
— Видео
Прямое управление крутящим моментом асинхронной машины с модулятором пространственного вектора
— Пример
Бездатчиковое полеориентированное управление асинхронным двигателем
— Пример
Поле-ориентированное управление асинхронным двигателем с использованием датчика скорости
— Пример
Управление без обратной связи и калибровка двигателя переменного тока
— Пример
Полеориентированное управление индукционной машиной
— Пример
Справочник по программному обеспечению
Индукционный двигатель
— Документация
Опорные сигналы управления асинхронным двигателем, ориентированные на поле
— Документация
Оценщик скорости скольжения для асинхронного двигателя
— Документация
Поле-ориентированное управление приводом асинхронного двигателя
— Документация
Перейдите от простых задач к более сложным маневрам, пройдясь по интерактивным примерам и учебным пособиям.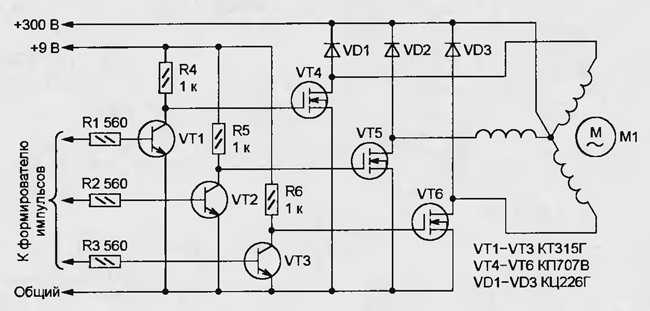
Ознакомьтесь с примерами управления двигателем
Ознакомьтесь с примерами преобразования энергии
Изучите примеры питания от батарей
Изучите сообщество Power Electronics Control Community
Сообщество MathWorks для студентов, исследователей и инженеров, использующих Simulink для управления силовой электроникой в электромобилях, возобновляемых источниках энергии, аккумуляторных системах, преобразовании энергии и управлении двигателем.
Начать обсуждение
Смотреть видео
Получите бесплатную пробную версию
30 дней исследования в ваших руках.
Загрузить сейчас
Понимание алгоритмов управления двигателем BLDC
Читать электронную книгу
Выберите веб-сайт
Выберите веб-сайт, чтобы получить переведенный контент, где он доступен, и увидеть местные события и
предложения. В зависимости от вашего местоположения мы рекомендуем вам выбрать: .
Вы также можете выбрать веб-сайт из следующего списка:
Европа
Свяжитесь с местным офисом
Формула и методы [Примечания GATE]
Серия испытаний
Автор: Айна Парашер|Обновлено: 7 ноября 2022 г. Однако скорость асинхронного двигателя может изменяться за счет изменения его синхронной скорости и скольжения. Для асинхронного двигателя с короткозамкнутым ротором скорость можно регулировать только через статор, но для асинхронного двигателя с контактными кольцами его скорость можно регулировать через статор и его ротор.
Управление скоростью асинхронного двигателя PDF [Примечания GATE]
Управление скоростью асинхронного двигателя осуществляется за счет потери эффективности и низкого коэффициента мощности. Здесь мы подробно рассмотрим управление скоростью асинхронного двигателя и обсудим различные методы управления скоростью, которые можно использовать.
Загрузить полные примечания к формуле теории сетей в формате PDF
Содержание
- 1. Управление скоростью асинхронного двигателя
- 2. Методы управления скоростью асинхронного двигателя
- 3. Метод управления напряжением
- 4. Метод управления частотой
- 5. Управление скоростью переключения полюсов
- 6. Метод сопротивления статора
- 7. Метод управления сопротивлением ротора
- 8. Метод восстановления мощности скольжения
 Управление скоростью асинхронного двигателя
Управление скоростью асинхронного двигателя9. Каскадирование или тандемное соединение
Читать статью полностью
Регулирование скорости асинхронного двигателя
Регулирование скорости асинхронного двигателя осуществляется для изменения токов в асинхронном двигателе для управления скоростью. Выражение для скорости (N) асинхронного двигателя равно
N=N с (1−с)
Следовательно, мы можем получить контроль над скоростью, изменяя ее синхронную скорость (N с ) или изменяя ее скольжение (с). Синхронная скорость асинхронного двигателя зависит от частоты питания и числа полюсов статора. Крутящий момент асинхронного двигателя во время работы определяется выражением
Крутящий момент асинхронного двигателя во время работы определяется выражением
T=[3×60/2πN с ]×sE 2 2 R 2 /R 2 2 ) 2
Следовательно, для данного крутящего момента и нагрузки мы можем изменять напряжение ротора и сопротивление ротора, чтобы изменять скольжение для управления скоростью асинхронного двигателя.
Методы управления скоростью асинхронного двигателя
Со стороны статора мы можем получить управление скоростью асинхронного двигателя, используя следующие методы, а именно.
- Метод управления напряжением
- Метод управления частотой
- Метод смены полюсов
- Метод сопротивления статора
Со стороны ротора регулирование скорости асинхронного двигателя может быть достигнуто следующими методами.
- Метод управления сопротивлением ротора
- Метод рекуперации мощности скольжения
- Каскадное (или) тандемное соединение
Кратко обсудим эти методы управления скоростью асинхронного двигателя.
Метод управления напряжением
В этом методе управления скоростью асинхронного двигателя напряжение питания изменяется с помощью автотрансформатора. Практически мы не можем увеличить уровни напряжения сверх номинального напряжения, так как напряжение изоляции увеличится и приведет к повреждению изоляции.
t = [3 × 60 /2πn S ] × SE 2 2 R 2 /R 2 2 +(SX 2 ) 2
9000. скольжение крошечное; следовательно (sX 2 ) 2 можно пренебречь
⇒T 𝛼 sE 2 2
⇒T 𝛼 sV 2 2
Из приведенного выше уравнения видно, что крутящий момент также падает при снижении напряжения питания.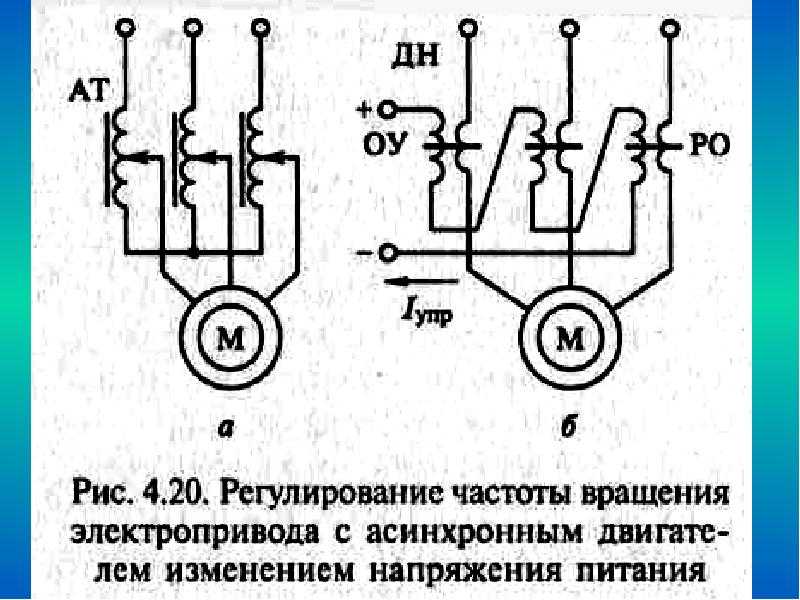 Если напряжение уменьшается для данной нагрузки, скольжение будет увеличиваться при снижении скорости, чтобы поддерживать постоянный крутящий момент нагрузки. Напряжение можно уменьшить до подходящего значения; двигатель станет нестабильным, если мы уменьшим напряжение ниже этого значения. Этот тип управления скоростью асинхронного двигателя используется редко, так как приводит к перегреву асинхронного двигателя, поскольку незначительное изменение скорости требует значительного снижения напряжения.
Если напряжение уменьшается для данной нагрузки, скольжение будет увеличиваться при снижении скорости, чтобы поддерживать постоянный крутящий момент нагрузки. Напряжение можно уменьшить до подходящего значения; двигатель станет нестабильным, если мы уменьшим напряжение ниже этого значения. Этот тип управления скоростью асинхронного двигателя используется редко, так как приводит к перегреву асинхронного двигателя, поскольку незначительное изменение скорости требует значительного снижения напряжения.
Метод управления частотой
Плотность потока сердечника статора обратно пропорциональна применяемой частоте. Чтобы уменьшить потери в сердечнике и улучшить работу двигателя, максимальная плотность потока (B m ) должна поддерживаться постоянной.
B m 𝛼 V/f
Таким образом, чтобы поддерживать максимальную плотность потока постоянной, мы должны изменять напряжение и частоту. Этот метод невозможен для частот выше номинальной частоты, поскольку необходимо также увеличить напряжение, что невозможно из-за ограничений по изоляции.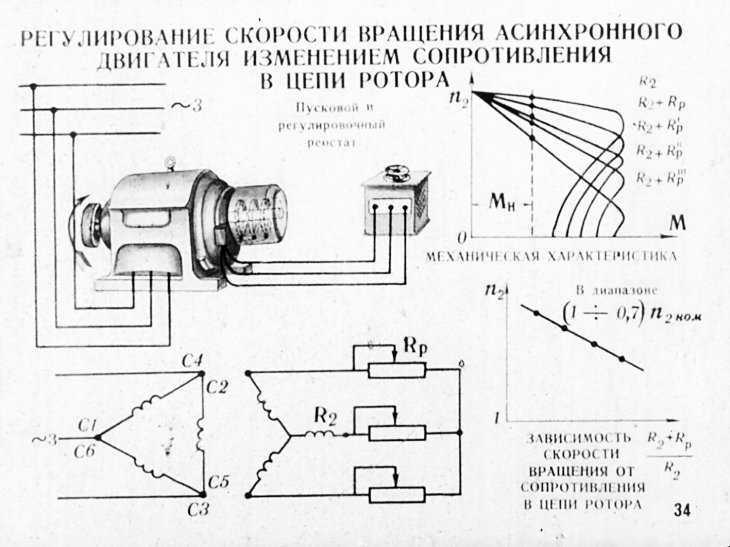 Этот метод требует преобразователей переменного напряжения и переменной частоты, что делает этот метод дорогостоящим. Тем не менее, этот метод предлагает широкий диапазон регулирования скорости, не влияя на КПД двигателя.
Этот метод требует преобразователей переменного напряжения и переменной частоты, что делает этот метод дорогостоящим. Тем не менее, этот метод предлагает широкий диапазон регулирования скорости, не влияя на КПД двигателя.
Управление скоростью переключения полюсов
Этот метод управления скоростью асинхронного двигателя может применяться только к асинхронному двигателю с короткозамкнутым ротором. Число полюсов в роторе асинхронного двигателя с контактными кольцами фиксировано, тогда как ротор с короткозамкнутым ротором может быть адаптирован к любому числу полюсов. Полюса асинхронного двигателя можно менять двумя способами.
- Несколько наборов обмоток
- Последовательная смена полюсов
В первом методе мы используем несколько наборов обмоток статора, предназначенных для разных наборов полюсов. Во время работы любой из них может быть подключен в соответствии с требованиями скорости пользователя, а другие наборы останутся открытыми.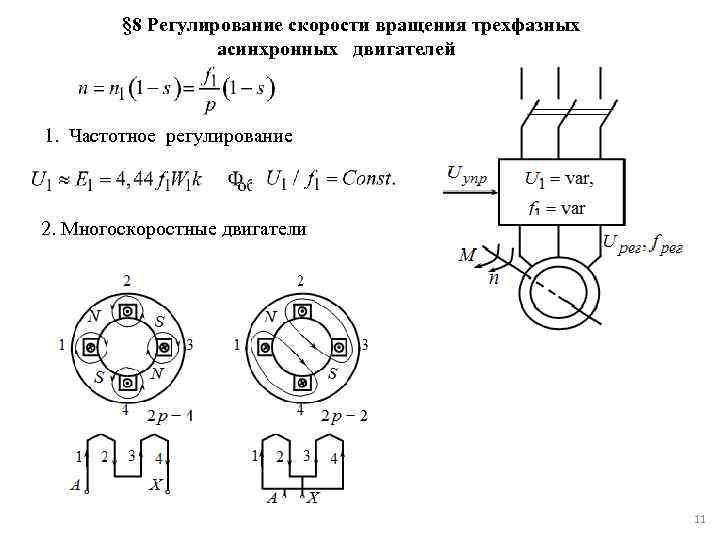 Мы знаем, что
Мы знаем, что
N с =120f/P
По мере увеличения числа полюсов скорость будет уменьшаться. Этот метод может изменять скорость только ступенчато, и он требует больших затрат, поскольку включает несколько обмоток статора.
В методе последовательной смены полюсов мы можем получить другой набор полюсов, поменяв местами катушки. Этот метод может дать только два набора скоростей.
Этот метод управления скоростью асинхронного двигателя аналогичен методу управления напряжением. Он требует последовательного включения трех реостатов с каждой фазой обмотки статора для снижения напряжения и достижения требуемой скорости. Поскольку из-за реостатов возникают некоторые потери мощности, этот метод будет предпочтительнее для машин с низким номиналом в течение небольшой продолжительности. Этот метод более выгоден при пуске, чем регулирование скорости.
Метод управления сопротивлением ротора
Этот метод управления скоростью асинхронного двигателя возможен только для асинхронного двигателя с контактными кольцами, поскольку мы не можем получить доступ к ротору асинхронного двигателя с короткозамкнутым ротором.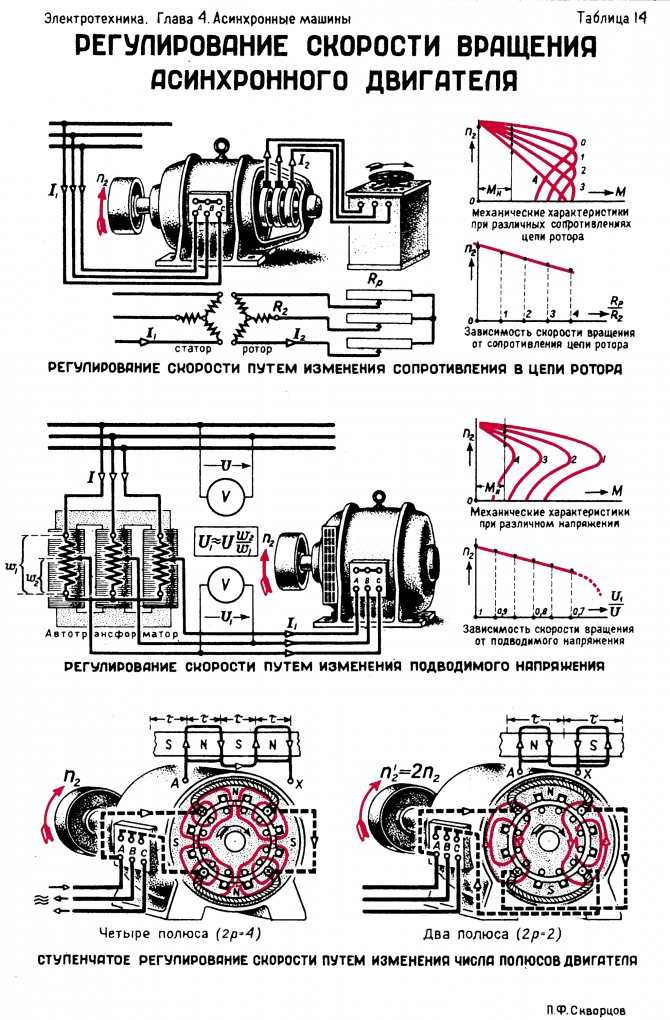 Этот метод подключает внешнее сопротивление к ротору через контактные кольца и щетки во время работы. Следовательно, это приводит к снижению крутящего момента.
Этот метод подключает внешнее сопротивление к ротору через контактные кольца и щетки во время работы. Следовательно, это приводит к снижению крутящего момента.
T=[3×60/2πN s ]×sE 2 2 R 2 /R 2 2 +(sX 2 ) 2
При заданном напряжении статора ЭДС, индуцируемая в роторе E 2 , постоянна, и во время работы скольжение незначительно; следовательно, (sX 2 ) 2 можно пренебречь.
⇒T 𝛼 s/R 2
Но для поддержания постоянного момента нагрузки скорость ротора будет уменьшаться, а скольжение увеличиваться. Поскольку рабочее скольжение увеличивается, этот метод неэффективен и непригоден для широкого круга приложений. Основное преимущество этого метода заключается в том, что пусковой момент увеличивается при добавлении внешнего сопротивления, но он также имеет существенные недостатки.
- Невозможно двигаться со скоростью выше обычной.
- Большие изменения скорости требуют больших значений сопротивления, однако добавление таких больших значений приведет к значительным потерям в меди и снижению эффективности схемы.
- Больше потерь в результате наличия сопротивления.
- Асинхронный двигатель с короткозамкнутым ротором не может работать с использованием этого метода.

Метод восстановления мощности скольжения
В этом методе управления скоростью асинхронного двигателя внешнее напряжение подается на ротор через контактные кольца и щетки с частотой скольжения (sf) для получения установившегося крутящего момента. Это можно сделать двумя способами.
В первом способе мы увеличиваем напряжение ротора, что приводит к увеличению скорости при заданной нагрузке. Мы знаем, что
T 𝛼 sE 2 2
Если напряжение ротора увеличить, крутящий момент увеличится; впоследствии скорость вращения ротора увеличится, а скольжение уменьшится.
Во втором способе уменьшаем напряжение в роторе, тогда уменьшится момент, увеличится скорость, уменьшится скольжение. Привод Шербиуса является лучшим примером такого рода операций.
Каскадное или тандемное соединение
В этом методе управления скоростью асинхронного двигателя нам нужны два асинхронных двигателя, один из которых представляет собой асинхронный двигатель с контактными кольцами, а другой представляет собой либо асинхронный двигатель с контактными кольцами, либо асинхронный двигатель с короткозамкнутым ротором. мотор. Обе машины будут механически соединены; первый двигатель представляет собой асинхронный двигатель с контактными кольцами, который питает второй двигатель через контактные кольца.
Скорость асинхронного двигателя с контактными кольцами
N S1 = 120 F/P 1
Скорость второго двигателя составляет
N S2 = 120S 1 F/P 2
В этом методе, это метод, это метод, есть скорость.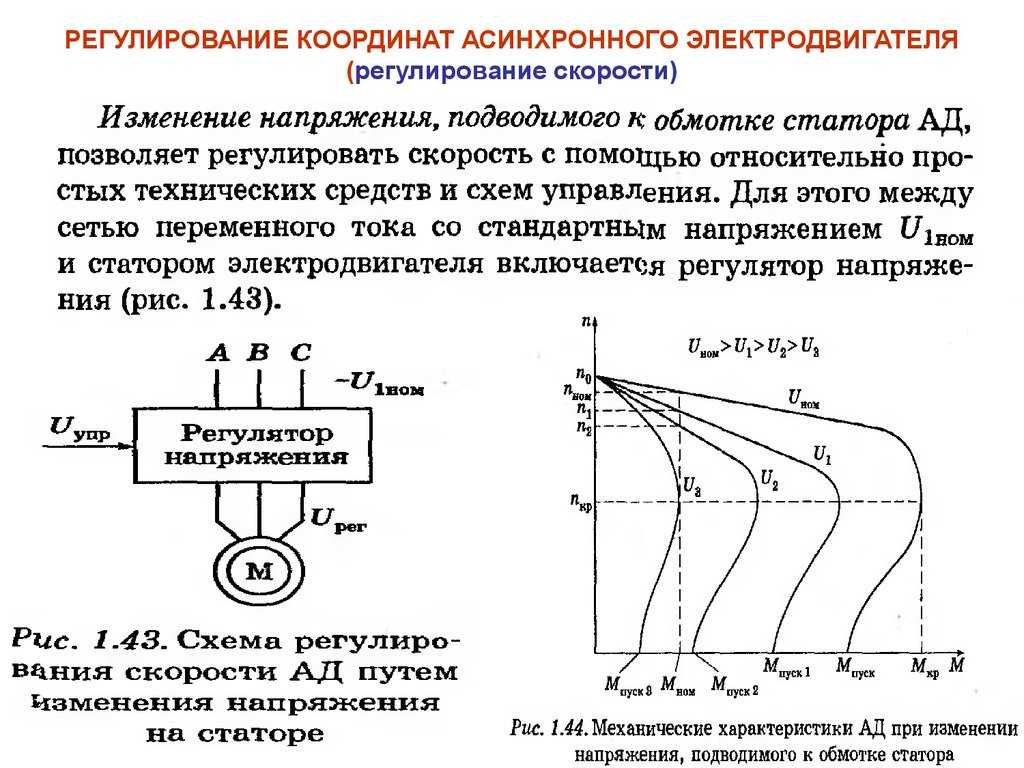 возможный. Они
возможный. Они
- 120 F/P 1 +P 2 в кумулятивном каскаде
- 120 F/P 1 -P 2 в дифференциальном каскаде
- 120 F/P 1 (Motor-Motor-Motor- (P/P 1 7 (P/P 1 (
- 120 F/P 1 (
- 120 F/P 1 . 1 только рабочий)
- 120 f/P 2 (При работе только двигателя 2)
При дифференциальном каскадировании количество полюсов обоих двигателей не должно быть одинаковым.
Часто задаваемые вопросы по управлению скоростью асинхронного двигателя
Какие существуют методы управления скоростью асинхронного двигателя?
Со стороны статора мы можем контролировать скорость, используя метод управления напряжением, метод управления сопротивлением, метод управления частотой и метод переключения полюсов. Со стороны ротора мы можем управлять скоростью, используя метод сопротивления ротора, метод рекуперации мощности скольжения и каскадное соединение.
Какими методами можно регулировать скорость асинхронного двигателя с короткозамкнутым ротором?
В асинхронном двигателе с короткозамкнутым ротором нет доступа к ротору, поэтому возможно только управление скоростью на основе статора, т. е. метод управления напряжением, метод контроля сопротивления, метод контроля частоты и метод переключения полюсов.
Что такое метод переключения полюсов для управления скоростью асинхронного двигателя?
Этот метод управления скоростью возможен двумя способами. Первый заключается в использовании нескольких наборов обмоток статора, в которых статор рассчитан на несколько наборов полюсов, поэтому мы можем соединить обмотку с набором полюсов, который соответствует нашим требованиям. Второй — последовательное изменение полюсов путем реверсирования катушек, поэтому мы можем получить еще одну другую скорость.
Что такое метод рекуперации мощности скольжения для регулирования скорости асинхронного двигателя?
В этом методе внешнее напряжение подается на ротор через контактные кольца и щетки с частотой скольжения (sf).