Содержание
Причины возникновения бросков тока при пуске асинхронных двигателей
Пуск асинхронного привода прямым включением в сеть связан с бросками тока в статорной цепи. Это общеизвестный факт. Но не все задумывались о том, в чем причина этого явления. Мы привыкли, что ток любого электродвигателя прямо пропорционален вращающему моменту на валу. А здесь, казалось бы, парадоксальная ситуация: момент двигателя при пуске ограничен, а ток может превышать номинальное значение в семь раз. Как же так получается?
Все дело в физике работы асинхронной машины. Переменное электромагнитное поле статора наводит ЭДС в обмотке ротора двигателя. Величина этой ЭДС, в соответствии с законами электромагнитной индукции, зависит от скорости изменения электромагнитного поля статора, то есть от частоты вращения этого поля относительно ротора (от скольжения).
Но если поле статора начинает вращаться сразу после подачи напряжения, то ротору необходимо какое-то время, для того, чтобы разогнаться. И чем мощнее и больше двигатель, тем больше времени требуется ротору для разгона – увеличенная масса способствует инерции.
И чем мощнее и больше двигатель, тем больше времени требуется ротору для разгона – увеличенная масса способствует инерции.
Величина скольжения, в свою очередь, имеет самое большое значение именно в первый момент пуска. В этот момент скольжение равно единице, ротор еще неподвижен, а поле уже вращается с максимальной скоростью. ЭДС в роторной цепи достигает максимального значения, так же как и ток ротора.
Ток ротора тоже является переменным, поэтому он тоже создает свое переменное электромагнитное поле. Это поле опять же наводит ЭДС уже в статорной цепи двигателя. А под воздействием упомянутой ЭДС в статоре начинает протекать дополнительная составляющая тока, компенсирующая МДС ротора.
Таким образом, ток в статоре всегда складывается из двух сонаправленных составляющих. Величина одной составляющей обусловлена собственным сопротивлением статорной обмотки. Эта составляющая имеет постоянное значение и на идеальном холостом ходу двигателя весь статорный ток сводится только к ней.
А вторая составляющая статорного тока зависит от тока в роторной цепи и своего максимума достигает в первый момент пуска двигателя, уменьшаясь до нуля по мере приближения к точке идеального холостого хода. За счет второй составляющей статорный ток двигателя и достигает таких огромных значений при пуске.
Остается невыясненным только один нюанс: почему большой пусковой ток асинхронного двигателя не обеспечивает столь же большого пускового момента, как это бывает у двигателей постоянного тока? Причина состоит в том, что момент двигателя создается только активной составляющей тока ротора, то есть той составляющей, которая совпадает по фазе с роторной ЭДС.
А соотношение активного и реактивного тока ротора зависит, прежде всего, от частоты ЭДС, наводимой в роторной обмотке. Чем выше частота, тем более «переменным» становится ток и тем большее значение приобретает индуктивное сопротивление обмоток ротора. А чем больше индуктивное сопротивление роторных обмоток, тем более реактивным становится роторный ток.
Максимальной частоты ЭДС ротора достигает именно в момент пуска, когда ротор неподвижен. В этот момент роторная ЭДС изменяется с частотой питающей сети – 50 герц. Впоследствии, когда двигатель выходит на рабочий участок характеристики, эта частота падает до нескольких герц, и индуктивное сопротивление обмоток перестает иметь значение, а ток ротора становится практически полностью активным.
Да, пусковой ток в роторной цепи асинхронного двигателя велик, но это преимущественно реактивный ток, он не может обеспечить большой электромеханический момент. Активный ток достигает необходимой величины только после снижения частоты ЭДС и выхода двигателя на рабочую характеристику. С этим и связаны две проблемы пуска асинхронных двигателей: ограниченный пусковой момент и, напротив, повышенный в несколько раз пусковой статорный ток.
Максимальной частоты ЭДС ротора достигает именно в момент пуска, когда ротор неподвижен. В этот момент роторная ЭДС изменяется с частотой питающей сети – 50 герц. Впоследствии, когда двигатель выходит на рабочий участок характеристики, эта частота падает до нескольких герц, и индуктивное сопротивление обмоток перестает иметь значение, а ток ротора становится практически полностью активным.
Впоследствии, когда двигатель выходит на рабочий участок характеристики, эта частота падает до нескольких герц, и индуктивное сопротивление обмоток перестает иметь значение, а ток ротора становится практически полностью активным.
|
Страница 2 из 2
Прямой пуск — самый распространенный метод пуска асинхронного двигателя с короткозамкнутым ротором. Двигатель подключается непосредственно к питающей сети через пускатель. При этом асинхронный двигатель с короткозамкнутым ротором развивает высокий пусковой крутящий момент с относительно малым временем разгона. Этот метод обычно используется для двигателей малой и средней мощности, которые достигают полной рабочей частоты вращения за короткое время.
К недостаткам прямого пуска асинхронных двигателей с короткозамкнутым ротором можно отнести:
— высокое потребление тока и соответствующее падение напряжения, что может повредить другим частям системы, подключенным к сети;
— интенсивное ускорение, которое оказывает негативное влияние на компоненты механических передач (ремни, цепи, механические соединения и т.
Электродвигатель — во время пуска на холостом ходу, когда происходит активное сопротивление его роторной цепи, начинает выделяться тепловая энергия, которая равна кинетической энергии маховых масс, которые приводятся в движение, а во время пуска под нагрузкой количество выделяемой электрической энергии увеличивается.
Выделение электрической энергии в любой цепи выбранного статора чаще всего несколько больше, чем в роторной. Во время частых пусков и во время довольно тяжелых условиях пуска, когда все маховые массы приводимых в движение механизмов большие, часто возникает опасность что электродвигатель перегреется. Количество пусков асинхронного двигателя за один час, допустимое по условиям его нагрева, будет больше, чем будет меньше номинальная мощность двигателя и соответственно, чем меньше соединение с его валом. Во время подачи полного напряжения на выбранный статор любой асинхронной машины имеют место два отрицательных фактора, а точнее: — колебательно затухающий характер данного пускового момента двигателя, — довольно большая кратность начального пускового тока двигателя [3, 4].
Последствия действий данных факторов.
Электродвигатель имеет значительный по величине пусковой ток, что приводит к сильным просадкам напряжения на питающих шинах выбранной подстанции (во время соизмеримой мощности двигателя и трансформатора), что может нарушить работу других потребителей и самого двигателя (торможение/пуска). Большой пусковой ток может вызвать также приличные термические перегрузки обмотки, в результате чего может появиться возможность ускорения старения всей изоляции, ее повреждение, в результате может образоваться межвитковое короткое замыкание. Чувствительным колебанием момента двигателя на самом начальном этапе пуска, которые могут быть выше 4-5 кратного значения заранее заданного (номинального) момента, могут создать лишние проблемы для работы данного механизма (любой кинематической цепи, вплоть до скручивания всех валов). Именно поэтому метод пуска электродвигателя, который напрямую подключен к сети, имеет три очень серьёзные недостатки – влияние на сеть, на сам двигатель и на технологический процесс.
Влияние на питающую сеть. Во время питания от автономных генераторов, особенно в самом конце линии электрических передач, падение напряжения на внутреннем сопротивлении выбранного источника питания и данной линии во время протеканий достаточно больших пусковых токов электродвигателя может привести к просадке напряжения в целой сети, что, конечно, отрицательно сказывается на работе любого другого подключенного к ней оборудования (терминалы релейной защиты, связь, компьютеры, контроллеры и другие), а сам электродвигатель имеет шанс не запуститься по причине уменьшения его момента пропорционально квадрату данной просадки напряжения.
Влияние на сам электродвигатель. Самые пиковые броски тока, которые происходят в переходном процессе пуска (от 6 до 10 по отношению к заданному (номинальному)), могут привести к значительным нагрузкам на всех проводниках, которые расположены в лобовой части обмотки электрического двигателя, что в результате приводит к ослаблению бандажирования обмотки, преждевременному выходу электродвигателя из рабочего состояния и постепенному нарушению изоляции по причине короткого замыкания всех витков обмотки [1].
Влияние на технологический процесс. Самые пиковые моменты переменного знака, которые развиваются электродвигателем во время пуска (от 4 до 5 кратные по отношению к заданному (номинальному)), могут привести к медленному повышению зазоров в механических соединениях между механизмом и электродвигателем, кроме этого, в другом ряде случаев вредно сказываются на всем технологическом процессе. Где данные нагрузки крайне недопустимы (к примеру, магистральные конвейеры, когда осуществляется вытягивание приводного ремня, смесители и вентиляторы в случае опасности деформирования, системы транспортировки развешанных, поломка рабочих колес и насосов, хрупких или уложенных материалов во время их раскачивания, рассыпания или падения и тому подобное) [2].
Электродвигатель и преимущества плавного пуска.
Использование устройств плавного пуска дает возможность: устранить все рывки в механической части привода в момент останова и пуска электродвигателя; увеличить период службы электродвигателя; уменьшить вероятность перегрева электродвигателя; снизить ударные перегрузки с помощью уменьшения пусковых токов электродвигателя.
Литература
Теги: рабочий механизм питающую сеть двигатель «ПерваяПредыдущая12СледующаяПоследняя» |
 д.), сокращая срок их службы.
д.), сокращая срок их службы.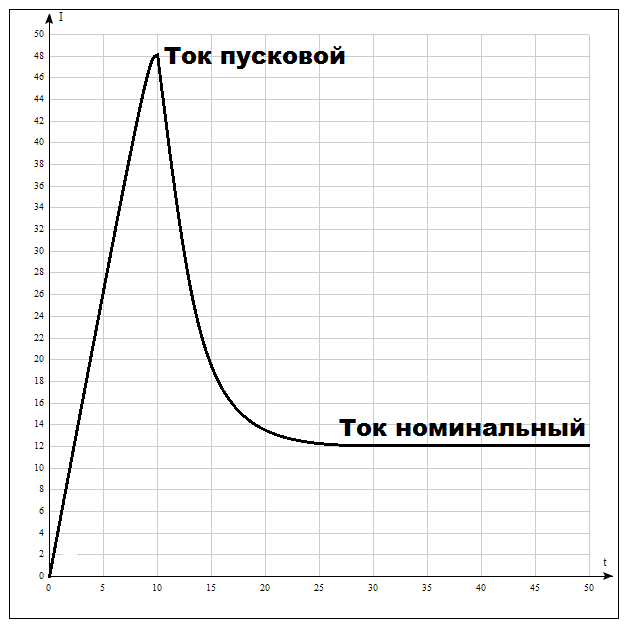


 Вместе с эффектом от плавного пуска данное устройство плавного пуска дает возможность уменьшить мгновенную активную используемую мощность, существенно уменьшить реактивную мощность, снизить шум, защитить электродвигатель, вибрацию и нагрев электродвигателя.
Вместе с эффектом от плавного пуска данное устройство плавного пуска дает возможность уменьшить мгновенную активную используемую мощность, существенно уменьшить реактивную мощность, снизить шум, защитить электродвигатель, вибрацию и нагрев электродвигателя. Служба поддержки призвана помочь пользователям в решении любых проблем, связанных с вопросами публикации своих работ и другими аспектами работы издательства «Проблемы науки».
Служба поддержки призвана помочь пользователям в решении любых проблем, связанных с вопросами публикации своих работ и другими аспектами работы издательства «Проблемы науки».почему асинхронный двигатель потребляет большой ток при запуске
Асинхронный двигатель потребляет большой пусковой ток по сравнению с рабочим состоянием. Пусковой ток асинхронного двигателя примерно в 5-6 раз превышает ток полной нагрузки двигателя. Асинхронный двигатель мощностью 11 кВт, 22 А, 440 В потребляет высокий пусковой ток около 132 А. Ток уменьшается по мере того, как двигатель разгоняется до своей базовой или синхронной скорости.
Причина 1: из-за индуктивных характеристик
Асинхронный двигатель можно рассматривать как трансформатор с первичной обмоткой и вторичной обмоткой, нагруженной нагрузкой, которая изменяет его импеданс.
Рисунок 1: Эквивалентная схема асинхронного двигателя
Вторичная обмотка обычно представляет собой одновитковую обмотку.
Импеданс нагрузки на роторе состоит из низкого сопротивления R и малой индуктивности L, следовательно,
Z=(R+jwL) куда, w - частота Р - Сопротивление L - индуктивность Z - Импеданс
, где W — частота, которая изменяется при вращении ротора до тех пор, пока не станет равной нулю, когда ротор достигнет синхронной скорости.
Когда ротор асинхронного двигателя неподвижен, ток в короткозамкнутых токопроводящих петлях ротора очень высок, так как сопротивление и индуктивность малы, а эффективная частота равна частоте сети.
Этот сильный ток в роторе создаст свое собственное магнитное поле, которое противодействует основному магнитному полю статора, это ослабляет магнитное поле статора, поэтому противо-ЭДС в статоре упадет, а напряжение питания будет намного выше, чем противо-ЭДС статора и поэтому ток питания увеличивается до высокого значения. Это стартовые условия.
Что касается импеданса, импеданс ротора определяется как Z=(R+jwL) w, частота высока при запуске, и когда ротор начинает вращаться, частота в роторе будет уменьшаться до нуля на синхронной скорости. Таким образом, полное сопротивление ротора уменьшается по мере увеличения скорости вращения ротора.
Таким образом, полное сопротивление ротора уменьшается по мере увеличения скорости вращения ротора.
Причина 2 : Из-за пускового скольжения двигателя
Напряжение, индуцируемое в роторе, зависит от относительной скорости синхронной скорости вращающегося магнитного поля и скорости ротора.
В начале ротор остановлен, поэтому его скорость равна нулю. При пуске разница между скоростью синхронной скорости вращающегося магнитного поля и скоростью ротора максимальна.
Разница между синхронной скоростью и скоростью вращения ротора называется скольжением двигателя.
Скольжение двигателя можно выразить как; S = (Ns-Nr)/Ns *100 ----------(1) Где, S = скольжение Ns= Синхронная скорость двигателя= 120 f/P Nr = скорость вращения ротора
Поскольку скорость ротора в начале равна нулю, проводник ротора отсекает максимальный поток, и в роторе индуцируется максимальное напряжение.
Когда двигатель начнет ускоряться, скорость ротора будет выравниваться в направлении синхронной скорости двигателя, и скольжение уменьшится.
Напряжение, индуцированное в проводнике ротора, можно выразить как;
Er = S* Es ------------(2) Где, Er = напряжение ротора S = скольжение Es = напряжение статора
При пуске скольжение двигателя равно единице, а индуцированное напряжение ротора равно напряжению статора. Индуцированное ротором напряжение продолжает уменьшаться по мере того, как двигатель разгоняется до своей базовой скорости.
Эр = Эс Когда Nr =0 и скольжение=1
Понятно, что индукционный ротор максимален при запуске двигателя.
Автотрансформаторный пускатель и приводы VFD, используемые для ограничения пускового тока асинхронного двигателя.
Недостатки высоких пусковых токов асинхронного двигателя
- Высокие пусковые токи
Высокие пусковые токи, потребляемые асинхронным двигателем во время пуска, могут привести к значительному падению напряжения на подключенной шине.
Это падение напряжения на шине может повлиять на работу других двигателей, работающих на шине. Провалы напряжения при пуске больших двигателей могут привести к отключению некоторых двигателей, работающих на той же шине.
Следует соблюдать осторожность, чтобы ограничить пусковые токи во время пуска двигателя, используя соответствующие методы пуска
2. Повышение температуры машины
Для больших двигателей срок службы машины зависит от количества пусков. Высокие пусковые токи могут привести к повышению температуры машины, повреждению изоляции и сокращению срока службы машины
Что такое пусковой ток в двигателе переменного тока и почему он важен?
Вы здесь: Домашняя страница / Часто задаваемые вопросы + основы / Что такое пусковой ток в двигателе переменного тока и почему это важно?
Даниэль Коллинз Оставить комментарий
Когда включается электрическое устройство, такое как асинхронный двигатель переменного тока, возникает очень высокий мгновенный скачок тока, называемый пусковым током.
При запуске асинхронного двигателя переменного тока подаваемое напряжение создает магнитное поле в статоре, которое индуцирует магнитное поле в роторе. Взаимодействие этих двух магнитных полей создает крутящий момент и заставляет двигатель вращаться. Согласно закону Ленца, создание магнитного поля вызывает индуцированное напряжение, которое противодействует напряжению питания. Это противоположное индуцированное напряжение — , известная как обратная ЭДС — , также работает для ограничения величины тока в двигателе.
Однако величина создаваемой противо-ЭДС прямо пропорциональна скорости двигателя. Таким образом, при запуске — , когда скорость двигателя близка к нулю, — обратная ЭДС очень мала, и допускается протекание высокого «пускового» тока.
На величину тока, потребляемого двигателем во время запуска, также влияет сопротивление обмоток статора. Более новые высокоэффективные двигатели, такие как версии с повышенной эффективностью IE3, имеют более низкое сопротивление обмотки (чтобы уменьшить I 2 R потери), поэтому пусковой ток может быть даже более серьезной проблемой в этих конструкциях, чем в более старых двигателях с низким КПД.
Самый высокий уровень пускового тока возникает во время первого полупериода работы двигателя и может более чем в 10 раз превышать ток полной нагрузки двигателя. Когда двигатель начинает двигаться, ток уменьшается до уровня тока заторможенного ротора двигателя, который часто в шесть-восемь раз превышает нормальный рабочий ток двигателя. Так как скорость двигателя — и, следовательно, обратная ЭДС — увеличивается, ток далее уменьшается, пока не будет достигнута нормальная рабочая скорость и нормальный рабочий ток.
Начальный всплеск тока — это пусковой ток, который быстро снижается до уровня тока заторможенного ротора двигателя (LRC), прежде чем, наконец, достичь нормального рабочего тока:
Изображение предоставлено: Электротехнический портал ток, потребляемый двигателем, когда ротор заблокирован или еще не начал двигаться. Термины «пусковой ток» и «ток заторможенного ротора» часто используются взаимозаменяемо, но в зависимости от контекста они могут относиться к разным явлениям.
Министерство энергетики США объясняет разницу между пусковым током и током заторможенного ротора следующим образом:
«Мгновенный пиковый пусковой ток — это мгновенный переходный ток, который возникает сразу (в течение половины цикла переменного тока) после замыкания контакта. Ток заторможенного ротора представляет собой среднеквадратический (RMS) ток, который устанавливается после пикового пускового тока; ток остается близким к значению заблокированного ротора во время разгона до тех пор, пока двигатель не достигнет своей рабочей скорости. Термины «пусковой ток» и «пусковой ток» часто используются для обозначения тока заторможенного ротора».
Высокий пусковой ток может вызвать ложное срабатывание защитных устройств или повреждение двигателя. Это также может вызвать провалы напряжения в линии питания (что может повлиять на другое оборудование) или даже помешать правильному запуску двигателя. Высокий пусковой ток также приводит к созданию высокого крутящего момента при запуске — , иногда в два раза превышающего номинальный крутящий момент — , что может вызвать резкое резкое ускорение, повреждающее механические нагрузки.