Содержание
Пропуск шагов ШД экструдера.
S3AL
Загрузка
10.01.2016
19023
Техничка
Подпишитесь на автора
Подписаться
Не хочу
1
Статья относится к принтерам:
Createbot MINI I
Доброго всем времени.
С момента покупки Createbot mini 1 экструдер была распечатана 1 модель и та убогонькая.
Остальное время тратилось на выискивание причины неудачных печатей. Грешил на пластик который был в комплекте, потом на температуру, потом на скорость печати, в итоге всё-равно косячит.
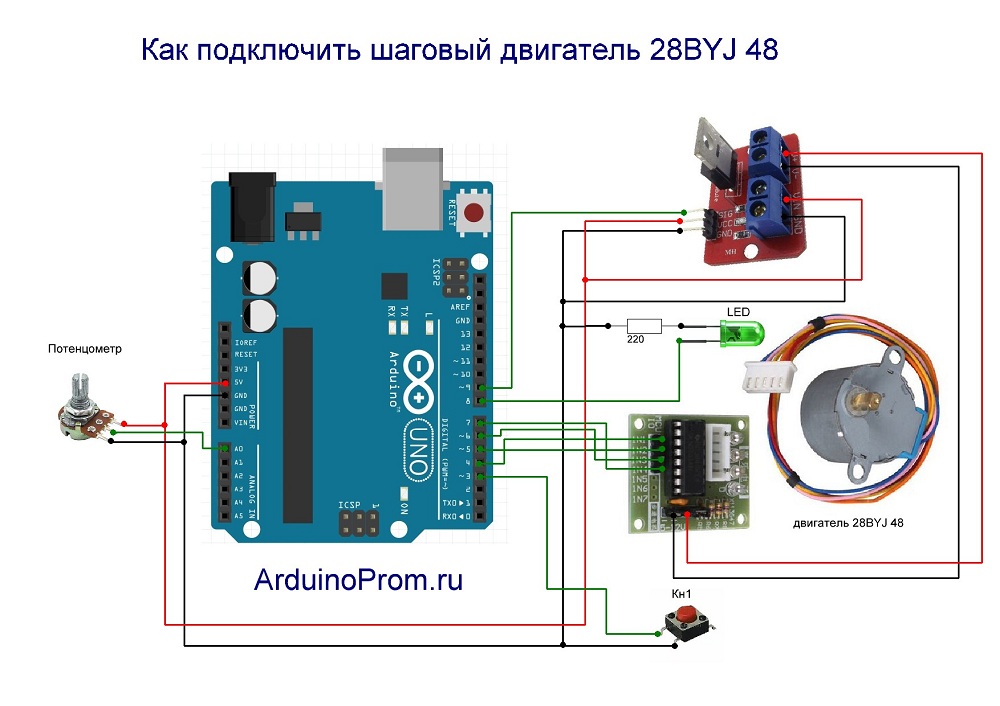
Что мы имеем — шаговый двигатель который расположен над экструдером для подачи филамента. Через меню принтера заходим в управление осями и выбираем экструдер с движением 1мм, крутим регулятор — без нагрузки крутится без проблем и туда и обратно. Вставляем пруток, крутим регулятор, а шестерня его пытается ухватить, но не хватает, а ШД начинает тупо пропускать шаги со звуком тыр-тыр-тыр. .. если при этом рукой проталкивать пруток, то ШД его хватает и проталкивает, но как только перестаешь помогать ему — опять тыр-тыр-тыр…
.. если при этом рукой проталкивать пруток, то ШД его хватает и проталкивает, но как только перестаешь помогать ему — опять тыр-тыр-тыр…
Нет, хотэнд не засран. Снимал ШД, разбирал обойму через которую протаскивается пруток — шестерня идеально чистая, прижимной ролик идеально чистый и легко вращается. Вручную, без ШД пруток филамента проталкивается как по маслу. На драйвере (последнее фото) винтик крутил по часовой стрелке на 90 и 180 градусов, даже в обратную сторону на 90 градусов пробовал — не помогло.
Еще, ради интереса, ручным управлением двигал оси X и Y — так-же пропускают шаги если удерживать каретки. А вот винт оси Y я как не пытался удержать — шаги не пропускает, упорно поднимает и опускает стол.
Итак. У кого какие мысли?
Подпишитесь на автора
Подписаться
Не хочу
1
Комментарии к статье
Еще больше интересных статей
Picavit
Загрузка
03. 12.2022
12.2022
2470
47
Подпишитесь на автора
Подписаться
Не хочу
Всем привет! Хочу поделиться с вами своей историей создания ручного шлифовального девайса на основе…
Читать дальше
DrProg
Загрузка
10.12.2022
5311
29
Подпишитесь на автора
Подписаться
Не хочу
Начну с того, что сам я печатные платы не делаю принципиально. Дело не только в кривых руках (хоть и…
Читать дальше
260
Подпишитесь на автора
Подписаться
Не хочу
Сопли. Кто с ними не сталкивался?!
Сколько раз этот вопрос поднимался. Сколько тем…
Сколько тем…
Читать дальше
Читайте в блогах
Зависимость момента шагового двигателя от скорости
Момент, создаваемый шаговым двигателем, зависит от скорости, тока в обмотках и схемы драйвера. На рис. 1а
показана
зависимость момента от угла поворота ротора.
Рис. 1. Возникновение мертвых зон в результате действия трения
У идеального шагового двигателя эта зависимость синусоидальная. Точки S являются положениями равновесия
ротора для
негруженного двигателя и соответствуют нескольким последовательным шагам. Если к валу двигателя приложить
внешний
момент, меньший момента удержания, то угловое положение ротора изменится на некоторый угол Ф.
купить шаговый двигатель
купить блок управления шаговым двигателем
Ф = (N/(2*pi))*sin(Ta/Th),
где Ф – угловое смещение,
N – количество шагов двигателя на оборот,
Ta – внешний приложенный момент,
Th – момент удержания.

Угловое смещение Ф является ошибкой позиционирования нагруженного двигателя. Если к валу двигателя приложить
момент,
превышающий момент удержания, то под действием этого момента вал провернется. В таком режиме положение
ротора является
неконтролируемым.
На практике всегда имеется приложенный к двигателю внешний момент, хотя бы потому, что двигателю приходится
преодолевать трение. Силы трения могут быть расделены на две категории: статическое трение или трение покоя,
для
преодоления которого требуется постоянный момент и динамическое трение или вязкое трение, которое зависит от
скорости.
Рассмотрим статическое трение. Предположим, что для его преодоления требуется момент в половину от пикового.
На рис.
1а штриховыми линиями показан момент трения. Таким образом, для вращения ротора остается только момент,
лежащий на
графике за пределами штриховых линий. Отсюда следуют два вывода: трение снижает момент на валу двигателя и
Отсюда следуют два вывода: трение снижает момент на валу двигателя и
появляются
мертвые зоны вокруг каждого положения равновесия ротора (рис. 1б):
d = 2 (S / (pi/2)) arcsin(Tf /Th) = (S / (pi/4)) arcsin(Tf / Th),
где d – ширина мертвой зоны в радианах,
S – угол шага в радианах,
Tf – момент трения,
Th – момент удержания.
Мертвые зоны ограничивают точность позиционирования. Например, наличие статического трения в половину от
пикового
момента двигателя с шагом 90 град. вызовет наличие мертвых зон в 60 град. Это означает, что шаг двигателя
может
колебаться от 30 до 150 град., в зависимости от того, в какой точке мертвой зоны остановится ротор после
очередного
шага.
Наличие мертвых зон является очень важным для микрошагового режима. Если, например, имеются мертвые зоны
величиной d,
то микрошаг величиной менее d вообще не сдвинет ротор с места. Поэтому для систем с использованием
Поэтому для систем с использованием
микрошагов очень
важно минимизировать трение покоя.
Когда двигатель работает под нагрузкой, всегда существует некоторый сдвиг между угловым положением ротора и
ориентацией магнитного поля статора. Особенно неблагоприятной
является ситуация, когда двигатель начинает торможение и момент нагрузки реверсируется. Нужно отметить, что
запаздывание или опережение относится только к положению, но не к скорости. В любом случае, если
синхронность работы
двигателя не потеряна, это запаздывание или опережение не может превышать величины двух полных шагов. Это
весьма
приятный факт.
Каждый раз, когда шаговый двигатель осуществляет шаг, ротор поворачивается на S радиан. При этом
минимальный момент
имеет в место, когда ротор находится ровно между соседними положениями равновесия (рис. 2).
2).
Рис. 2. Момент удержания и рабочий момент шагового двигателя.
Этот момент называют рабочим моментом, он означает, какой наибольший момент может преодолевать двигатель
при вращении
с малой скоростью. При синусоидальной зависимости момента от угла поворота ротора, этот момент Tr =
Th/(20.5). Если двигатель делает шаг с двумя запитанными обмотками, то рабочий момент равен
моменту
удержания для одной запитанной обмотки.
Параметры привода на основе шагового двигателя сильно зависят от характеристик нагрузки. Кроме трения,
реальная
нагрузка обладает инерцией. Инерция препятствует изменению скорости. Инерционная нагрузка требует от
двигателя больших
моментов на разгоне и торможении, ограничивая таким образом максимальное ускорение. С другой стороны,
увеличение
инерционности нагрузки увеличивает стабильность скорости.
Такой параметр шагового двигателя, как зависимость момента от скорости является важнейшим при выборе типа
двигателя, выборе метода управления фазами и выборе схемы драйвера. При конструировании высокоскоростных
драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность
определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не
будет прямоугольной. При низких скоростях (рис. 3а) время нарастания и спада тока не способно сильно повлиять на
момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках
двигателя не успевает достигнуть номинального значения (рис. 3б).
Рис. 3. Форма тока в обмотках двигателя на разных скоростях работы.
Для того, чтобы момент падал как можно меньше, необходимо обеспечить высокую скорость нарастания тока в
обмотках
двигателя, что достигается применением специальных схем для их питания.
Поведение момента при увеличении частоты коммутации фаз примерно таково: начиная с некоторой частоты среза
момент
монотонно падает. Обычно для шагового двигателя приводятся две кривые зависимости момента от скорости (рис.
4).
Рис. 4. Зависимость момента от скорости.
Внутренняя кривая (кривая старта, или pull-in curve) показывает, при каком максимальном моменте трения для
данной
скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой
максимальной
частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный
двигатель
может тронуться. На практике эта величина лежит в пределах 200 – 500 полных шагов в секунду. Инерционность
нагрузки
сильно влияет на вид внутренней кривой. Большая инерционность соответствует меньшей области под кривой. Эта
Эта
область
называется областью старта. Внешняя кривая (кривая разгона, или pull-out curve) показывает, при каком
максимальном
моменте трения для данной скорости шаговый двигатель способен поддерживать вращение без пропуска шагов. Эта
кривая
пересекает ось скоростей в точке, называемой максимальной частотой разгона. Она показывает максимальную
скорость для
данного двигателя без нагрузки. При измерении максимальной скорости нужно иметь в виду, что из-за явления
резонанса
момент равен нулю еще и на резонансной частоте. Область, которая лежит между кривыми, называется областью
разгона.
причин и мер по устранению пропущенных шагов шагового двигателя | Лю Люсиль
Шаговый двигатель может осуществлять управление положением и скоростью двигателя без обратной связи в зависимости от количества импульсов и частоты импульсов. Это дешевый, простой, но удобный в использовании двигатель-регулятор, который все шире используется в области автоматического управления. Однако, поскольку шаговый двигатель не является системой управления с обратной связью, неправильный выбор или неправильное использование 9Шаговый двигатель 0005 может легко привести к тому, что шаговый двигатель потеряет шаг, то есть шаговый двигатель не достигнет положения, которого он должен достичь в соответствии с инструкцией, что очень огорчает инженеров. Тогда в чем причина того, что шаговый двигатель выходит за пределы шага ? Какие контрмеры можно предпринять, чтобы не сбиться с пути?
Это дешевый, простой, но удобный в использовании двигатель-регулятор, который все шире используется в области автоматического управления. Однако, поскольку шаговый двигатель не является системой управления с обратной связью, неправильный выбор или неправильное использование 9Шаговый двигатель 0005 может легко привести к тому, что шаговый двигатель потеряет шаг, то есть шаговый двигатель не достигнет положения, которого он должен достичь в соответствии с инструкцией, что очень огорчает инженеров. Тогда в чем причина того, что шаговый двигатель выходит за пределы шага ? Какие контрмеры можно предпринять, чтобы не сбиться с пути?
Есть много причин, по которым шаговый двигатель теряет шаг . В фактическом процессе подачи заявки необходимо использовать метод исключения для анализа один за другим, чтобы выяснить реальную причину несоответствия. Как правило, есть несколько причин, ниже этой причины 9Шаговые двигатели 0005 для потери шага :
1. Сам шаговый двигатель постоянного тока имеет недостаточный рабочий крутящий момент и не способен управлять нагрузкой;
Сам шаговый двигатель постоянного тока имеет недостаточный рабочий крутящий момент и не способен управлять нагрузкой;
2. Если процесс ускорения и торможения шагового двигателя недостаточен при его запуске и остановке, шаговый двигатель склонен терять шаг в этом процессе;
3. Недостаточная мощность шагового двигателя приводит к тому, что входная мощность шагового двигателя слишком мала, что приводит к потере шага.
4. Недостаточное управляющее напряжение шагового двигателя или установлен слишком низкий управляющий ток;
5. Водитель или контроллер получает помехи сигнала;
6. Резонанс системы шагового двигателя приводит к снижению мощности нагрузки шагового двигателя и возникновению рассинхронизации;
7. Не совпадают сигналы драйвера и контроллера;
8. Ошибка люфта синхронного колеса или редуктора не компенсируется в программе или значение компенсации неправильное;
9. Проблема с самой управляющей программой.
Принимая во внимание причины вышеуказанных проблем, можно предпринять следующие контрмеры для решения проблемы шагового двигателя , выходящей из шага :
1. Рассчитайте крутящий момент нагрузки, сверяясь с диаграммой шага шагового двигателя . двигатель , чтобы наблюдать, имеет ли шаговый двигатель при соответствующей скорости достаточный крутящий момент для управления нагрузкой. Вы можете перейти на шаговый двигатель с большим крутящим моментом на соответствующей рабочей скорости для сравнительного теста.
2. Обычно рекомендуется, чтобы момент инерции нагрузки не превышал момент инерции шагового двигателя более чем в 10 раз, иначе процесс разгона и торможения будет относительно длительным.
3. В момент, когда шаговый двигатель запустится , мы проверим ток, который примерно в 1,6 раза превышает номинальный ток. Если мощности источника питания недостаточно, эффективный ток в двигателе будет слишком низким, что не приведет к нагрузке. Обычно рекомендуется, чтобы источник питания имел запас более 30%.
Обычно рекомендуется, чтобы источник питания имел запас более 30%.
4. Шаговый двигатель должен быстро запускаться или работать на высокой скорости. Ему требуется относительно высокое напряжение возбуждения и достаточно большое значение настройки рабочего тока, иначе он легко пропустит шаги.
5. Перейдите на другую модель драйвера и посмотрите, не нарушен ли его сигнал, или проконтролируйте движение двигателя А и двигателя В, чтобы определить, нарушен ли сигнал двигателя.
6. Выберите шаговый двигатель с соответствующими параметрами для повышения производительности привода или используйте физические методы, такие как амортизирующие прокладки, для снижения вибрации.
7. Если сигналы драйвера шагового двигателя и контроллера не совпадают, смещение положения будет равномерно увеличиваться с течением времени. Просто измените метод распознавания сигналов привода или контроллера, чтобы они совпадали.
8. Из-за проблем с точностью в синхронном колесе или редукторе будет накапливаться определенное количество ошибок, и в программе управления должна быть сделана разумная компенсация.
9. Программа управления также может привести к потере шага двигателя. Необходимо проверить, есть ли проблемы в управляющей программе.
Если причина проблемы не может быть найдена какое-то время, инженер заставит шаговый двигатель поработать в течение некоторого времени, чтобы снова найти причину, что повлияет на эффективность оборудования. В последние годы стали популярными шаговые двигатели с обратной связью . Это также решение с помощью управления с обратной связью для реализации полного управления шаговыми двигателями , но стоимость будет выше. Теперь некоторые приводные микросхемы шагового двигателя могут выводить сигнал рассогласования шага 9.Шаговый двигатель 0005 в соответствии с ненормальным изменением мгновенного тока для шагового двигателя вне шага .
Defy производит различные типы шаговых двигателей, а также предоставляет индивидуальные услуги для клиентов. Добро пожаловать в нашу компанию для расследования и сотрудничества.
Телефон/WhatsApp: +(86) 13838306720
Электронная почта: [email protected]
Адрес: №96, Ruida Road, Зона высоких технологий, Чжэнчжоу, Хэнань, Китай
Почему в шаговых двигателях с разомкнутым контуром теряются шаги и как решить эту проблему
Некоторые системы контроллеров/приводов могут коммутировать высокополюсные (шаговые) двигатели в бесщеточные двигатели переменного тока.
В идеальной системе движения двигатель вращает определенное заданное число оборотов на каждую единицу подаваемой ему электроэнергии. Но если нагрузка на двигатель становится слишком большой, не имеет значения, какую мощность вы пытаетесь на него подать. За пределами определенного предела — максимальный номинальный крутящий момент — двигатели больше не могут вращаться. Движения становятся беспорядочными, что серьезно снижает точность. Почему? Сервосистемы сразу улавливают возникшую ошибку, а системы с разомкнутым контуром — нет. Это наиболее проблематично, когда появляется в системах с технологией шагового привода. Шаговые системы предназначены для обеспечения управления положением без дорогостоящей обратной связи, где требуется точное движение. Превышение доступного крутящего момента или других ограничений приводит к потерянные шаги — неудачи продвижения в позиции, оставшиеся незамеченными .
Шаговые системы предназначены для обеспечения управления положением без дорогостоящей обратной связи, где требуется точное движение. Превышение доступного крутящего момента или других ограничений приводит к потерянные шаги — неудачи продвижения в позиции, оставшиеся незамеченными .
Как показано ниже, полушаговый режим производит восемь шагов за один электрический оборот — каждые 45° — в то время как микрошаг колеблется от 16 шагов за один оборот до сотен или даже тысяч точек за один электрический оборот.
Для перемещения двигателя токи в фазных обмотках статора изменяются так, чтобы создать вращающееся магнитное поле. Ротор пытается выровняться с магнитным полем, следуя вращению и производя движение. Большое количество полюсов большинства шаговых двигателей — 100 полюсов для обычного шагового двигателя 1,8° — требует 50 полных электрических оборотов фазных токов на один оборот ротора. Фазные токи управляются синусоидально-косинусным сигналом; то есть одна фаза управляется приближением синусоидального сигнала, а другая возбуждается приближением косинусоидального сигнала.
При полном шаге двигателя на один электрический оборот приходится четыре полных шага. Они могут располагаться под углами 0, 90, 180 и 270° в случае волнового степпинга (когда включена одна фаза) или под 45, 135, 225 и 315° при двухфазном степпинге. . Полушаговый режим производит восемь шагов за электрический оборот — каждые 45° — в то время как микрошаг колеблется от 16 шагов за оборот до сотен или даже тысяч точек за каждый электрический оборот. На самом деле, как мы обсудим далее, именно на этой возможности основаны «гибридные шаговые» решения для потерянных шагов. Гибридный шаговый двигатель на самом деле представляет собой синхронный двигатель переменного тока с постоянными магнитами с большим числом полюсов, который может работать вплоть до нулевой частоты.
Проблемы с резонансом
Двигатель создает крутящий момент только тогда, когда его ротор не выровнен с магнитным полем статора. Крутящий момент изменяется примерно по синусоиде с этим «углом ошибки». Две вещи в двигателе объединяются, чтобы эффективно сформировать нелинейный вращающийся маятник пружины/массы:
Две вещи в двигателе объединяются, чтобы эффективно сформировать нелинейный вращающийся маятник пружины/массы:
• Взаимодействие между полем статора шагового двигателя и ротором.
• Момент инерции ротора.
Каждый шаг или дробный шаг, применяемый к обмоткам двигателя, смещает точку равновесия маятника, устанавливая новый угол ошибки. Новый угол ошибки приводит к новой точке крутящего момента, и ротор, работающий как вращающийся маятник из пружины/массы, пытается следовать за ним. Если система слегка демпфирована (что является обычным явлением) и системе дается достаточно времени, ротор выходит за пределы точки равновесия, колеблясь взад-вперед, пока не стабилизируется. Если следующий шаг происходит, когда система имеет достаточную скорость при движении в в противоположном направлении, то доступный пиковый мгновенный крутящий момент может оказаться недостаточным для удержания ротора в пределах ±180 электрических градусов. Когда это происходит, система соскальзывает в соседний цикл синусоидальной волны момента ошибки. Когда это происходит, степпер фактически теряет четыре шага. Если ротор не сможет восстановить синхронизацию со статором, может быть потеряно еще много шагов.
Когда это происходит, степпер фактически теряет четыре шага. Если ротор не сможет восстановить синхронизацию со статором, может быть потеряно еще много шагов.
Двигатель создает крутящий момент только тогда, когда ротор не выровнен с магнитным полем статора, изменяясь примерно по синусоиде с углом ошибки.
Звон ротора в виде вращающегося маятника, связанный с провалами крутящего момента от шагового двигателя без обратной связи, обычно называют низкочастотным резонансом . Двигатель, приложенный ток и нагрузка влияют на эту резонансную частоту, что приводит к низкочастотному резонансу обычно от 50 до 150 об / мин, что соответствует примерно от 150 до 500 шагов в секунду.
Шаговая коррекция
Микрошаг уменьшает амплитуду колебаний крутящего момента между шагами, что снижает возбуждение маятникового резонанса и, следовательно, вероятность того, что угол ошибки станет достаточно большим, чтобы потерять шаги. (Обратите внимание, что микрошаговый режим наиболее эффективен с двигателями, оптимизированными для него. Чтобы проиллюстрировать это, многие шаговые двигатели, оптимизированные для полного шага, имеют фиксирующий момент , который способствует положению полного шага, но на самом деле вызывает значительное заедание при микрошаге.)
Чтобы проиллюстрировать это, многие шаговые двигатели, оптимизированные для полного шага, имеют фиксирующий момент , который способствует положению полного шага, но на самом деле вызывает значительное заедание при микрошаге.)
Разрешение микрошаговых драйверов часто падает с увеличением скорости вращения; снижение разрешения неизбежно из-за ограниченной пропускной способности как контроллера, так и драйвера. В качестве аргумента представьте, что разработчик попытался управлять микрошаговым контроллером с 40 000 шагов в секунду при 50 об/с (3 000 об/мин). Затем ему пришлось бы выдавать 2 000 000 микрошагов в секунду, чтобы сохранить все шаги. Даже если бы это было возможно, типичный драйвер ШИМ работает только на частоте от 20 до 40 кГц, поэтому точные интерполяции никогда не достигли бы двигателя. Чтобы устранить эту неспособность выполнить каждый микрошаг на более высоких скоростях, количество микрошагов в секунду часто уменьшается по мере увеличения скорости двигателя. Переходы между этими различными разрешениями могут вызвать импульс крутящего момента двигателя, вызывая звон, который может привести к потере шагов.
Переходы между этими различными разрешениями могут вызвать импульс крутящего момента двигателя, вызывая звон, который может привести к потере шагов.
Нестабильность
Существует еще одно снижение крутящего момента, происходящее на более высоких скоростях, примерно соответствующее скорости, при которой комбинация источник питания/драйвер становится неспособной контролировать ток. Это, в свою очередь, соответствует началу параболической «постоянной мощности» части кривой крутящего момента, называемой среднерезонансной нестабильностью . Потеря способности управлять током происходит, когда противо-ЭДС двигателя возрастает до точки, где напряжение питания подается на драйвер не может преодолеть как противо-ЭДС, так и резистивные и индуктивные перепады при требуемом токе . Ток отстает по фазе на 90° от заданного тока, когда драйвер переключается из режима управления током в режим управления напряжением.
Любой механический звон маятника ротора заставляет двигатель ускоряться и замедляться, изменяя как скорость, так и относительный угол между углом ведомого поля и углом ротора. Это меняет две вещи: звездная величина и угол противоЭДС по отношению к фазе управляемого тока. Почему это важно? Это может привести к тому, что драйвер будет переключаться между режимом напряжения (полное включение) и режимом тока (прерывание). занимает заданное положение и теряет шаги или вообще перестает вращаться. Работа в этом диапазоне скоростей может потребовать либо механического демпфирования, либо электрического демпфирования, чтобы стабилизировать работу двигателя и обеспечить полезный крутящий момент.
Это меняет две вещи: звездная величина и угол противоЭДС по отношению к фазе управляемого тока. Почему это важно? Это может привести к тому, что драйвер будет переключаться между режимом напряжения (полное включение) и режимом тока (прерывание). занимает заданное положение и теряет шаги или вообще перестает вращаться. Работа в этом диапазоне скоростей может потребовать либо механического демпфирования, либо электрического демпфирования, чтобы стабилизировать работу двигателя и обеспечить полезный крутящий момент.
Резкие движения, внешние силы
Низкочастотный резонанс и среднечастотная нестабильность — не единственные причины потери шагов. Вращающийся маятник также начинает раскачиваться (другими словами, возбуждается) внезапными изменениями заданной скорости и нагрузки. Нестабильности также могут быть механическими. Валы, муфты и компоненты передачи мощности между двигателем и нагрузкой также действуют как вращающиеся пружины.
Например, зубчатые передачи снимают нагрузку при изменении направления из-за люфта. Когда нагрузка отсоединена от системы, двигатель ускоряется (из-за меньшей инерции) до тех пор, пока не будет устранен люфт. Когда шестерни снова входят в зацепление, разница в скорости между двигателем и нагрузкой может отражать избыточный крутящий момент обратно на двигатель. Таким образом, система работает циклически: двигатель замедляется ниже скорости нагрузки, снова нагрузка разъединяется, а затем двигатель ускоряется. В некоторых случаях изменения скорости может быть достаточно, чтобы шестерни сначала ударили по одной стороне, а затем отскочили и ударили по противоположной стороне, и так несколько раз. Точное время реверсивного звона может варьироваться как в зависимости от положения зубчатой передачи, так и в зависимости от износа шестерен, что затрудняет выбор компенсирующей ступенчатой последовательности.
Когда нагрузка отсоединена от системы, двигатель ускоряется (из-за меньшей инерции) до тех пор, пока не будет устранен люфт. Когда шестерни снова входят в зацепление, разница в скорости между двигателем и нагрузкой может отражать избыточный крутящий момент обратно на двигатель. Таким образом, система работает циклически: двигатель замедляется ниже скорости нагрузки, снова нагрузка разъединяется, а затем двигатель ускоряется. В некоторых случаях изменения скорости может быть достаточно, чтобы шестерни сначала ударили по одной стороне, а затем отскочили и ударили по противоположной стороне, и так несколько раз. Точное время реверсивного звона может варьироваться как в зависимости от положения зубчатой передачи, так и в зависимости от износа шестерен, что затрудняет выбор компенсирующей ступенчатой последовательности.
Другая проблема стабильности возникает с линейными движителями с ременным приводом. Эти единицы испытывают резонанс, частота которого постоянно меняется . Любой, кто когда-либо играл на струнном инструменте (или на резиновой ленте, натянутой на чашку), может подтвердить, что высоту тона или резонансную частоту можно изменять, изменяя либо натяжение струны, либо ее длину. Движение линейного ременного механизма изменяет оба этих параметра. Линейная сила, приложенная к держателю и его нагрузке, представляет собой разницу между натяжениями двух половин ремня, а положение держателя изменяет длину этих участков ремня. (Обратите внимание, что эти же эффекты изменяют как резонансную частоту самого ремня, так и резонансную частоту системы нагрузки на ремень.) Это означает, что одно и то же движение с той же нагрузкой и двигателем может нормально работать с системой, начинающейся с положения 9.0115 A , но не в позиции B . А что, если система несет переменную нагрузку? Это только еще больше усложняет дело.
Любой, кто когда-либо играл на струнном инструменте (или на резиновой ленте, натянутой на чашку), может подтвердить, что высоту тона или резонансную частоту можно изменять, изменяя либо натяжение струны, либо ее длину. Движение линейного ременного механизма изменяет оба этих параметра. Линейная сила, приложенная к держателю и его нагрузке, представляет собой разницу между натяжениями двух половин ремня, а положение держателя изменяет длину этих участков ремня. (Обратите внимание, что эти же эффекты изменяют как резонансную частоту самого ремня, так и резонансную частоту системы нагрузки на ремень.) Это означает, что одно и то же движение с той же нагрузкой и двигателем может нормально работать с системой, начинающейся с положения 9.0115 A , но не в позиции B . А что, если система несет переменную нагрузку? Это только еще больше усложняет дело.
Повышение стабильности
Для стабилизации шаговых двигателей используются как механические, так и электрические подходы. Механические подходы обычно включают увеличение инерции вращения двигателя, чтобы сделать колебания нагрузки менее значительными, или добавление демпфирования в систему. Вращательная инерция увеличивается либо за счет изменения размера или конструкции двигателя, либо путем присоединения маховиков к валу двигателя как можно ближе к двигателю. Механическое демпфирование системы увеличивается за счет включения магнитных демпферов, вязких инерционных демпферов, феррожидкостных и эластичных опор двигателя, муфт и ремней.
Механические подходы обычно включают увеличение инерции вращения двигателя, чтобы сделать колебания нагрузки менее значительными, или добавление демпфирования в систему. Вращательная инерция увеличивается либо за счет изменения размера или конструкции двигателя, либо путем присоединения маховиков к валу двигателя как можно ближе к двигателю. Механическое демпфирование системы увеличивается за счет включения магнитных демпферов, вязких инерционных демпферов, феррожидкостных и эластичных опор двигателя, муфт и ремней.
С другой стороны, электронные подходы к повышению стабильности обычно измеряют (прямо или косвенно) положение и скорость двигателя. Затем ток в обмотках двигателя изменяется таким образом, чтобы демпфировать систему. Эти электронные методы включают в себя:
• Измерение или оценку противо-ЭДС каждой обмотки (включая информацию о скорости и положении) и добавление части сигнала противо-ЭДС к заданному току в каждой обмотке
• Изменение драйвера схемы
• Использование информации о положении/скорости для изменения последовательности импульсов, подаваемой на шаговый двигатель.
• Полное сервоуправление шаговым двигателем.
Дополнительные ресурсы — для дальнейшего чтения
Leenhouts, Albert. Справочник по проектированию шаговых двигателей. Kingman: Litchfield Engineering Co., 1990.
Лабриола, Дон и Дэн Джонс. «Использование характеристик магнитной передачи от компактного встроенного сервопривода». проц. 28-й Инкрементальные системы управления движением и устройства. Ливан: IMCSS, 19 лет.99.
Хауда, Акихико. «Двухфазный гибридный шаговый двигатель с функцией Keep-in-Step». 28-я сессия «Инкрементальные системы управления движением и устройства». проц. 28-й Инкрементальные системы управления движением и устройства. Ливан: IMCSS, 1999.
Rusu, Calin. «Управление на основе DSP для гибридного шагового двигателя с ориентацией поля». проц. 28-й Инкрементальные системы управления движением и устройства. Ливан: IMCSS, 1999.
Линхаутс, Альберт. «Шаговые двигатели и игра с шестернями». проц. 29-й Инкрементальные системы управления движением и устройства. Ливан: IMCSS, 19 лет.98.
проц. 29-й Инкрементальные системы управления движением и устройства. Ливан: IMCSS, 19 лет.98.
Нордквист, Джек. «Происхождение и средства защиты от резонансной активности в системах шаговых двигателей». проц. 26-й Инкрементальные системы управления движением и устройства. Ливан: IMCSS, 1997.
Радж, К., Б. Московиц, Дж. Торрес, Д. Купер, Т. Берк, Б. Трюдо. «Эксплуатационные характеристики шаговых двигателей с феррожидкостью». проц. 23-й Инкрементальные системы управления движением и устройства. Ливан: IMCSS, 1994.
Марусима, К. и Ральф Хорбер. «Разработка высокопроизводительного сенсомотора с датчиком и управляющими катушками». проц. 23-й Инкрементальные системы управления движением и устройства. Ливан: IMCSS, 19 лет.94.
Ом, Дал и Венкатеш Чава. «Торсионный резонанс в сервосистемах и цифровых фильтрах». проц. 23-й Инкрементальные системы управления движением и устройства. Ливан: IMCSS, 1994.
Круз, Дэвид. «Контроллер BLDC/шагового двигателя для высокопроизводительного инкрементного движения».