Содержание
Управляем шаговым двигателем с телефона. Двигатель 28byj 48.
Подключение очень простое. Сначала вставляем разъём идущий от шагового двигателя к драйверу ULN2003, а контакты с драйвера соединяем с платой ESP. Что бы было проще, я соединил так.
- IN1 – D1,
- IN2 – D2,
- IN3 – D3,
- IN4 – D4
Питание.
контакт – соединил с землёй на плате, а + с контактом VIN.
Это уже 4 видео из серии — Управляем устройствами с телефона. Посмотреть их, можно здесь.
А теперь пробежимся по скетчу.
Это установленные библиотеки. Вам ничего дополнительно устанавливать не придётся. Все они входят в комплект ARDUINO IDE.
- Сюда вставляем имя WIFI сети и пароль.
- Создаём переменные для хранения значений к каким контактам на плате ESP подключен драйвер двигателя, для удобного обращения к ним.

- Так как мы не используем никаких библиотек для работы с шаговым двигателем, то нам придётся самим управлять шагами, Вот здесь мы и указываем, что делать при об обращении к этим массивам.
- Это переменная для обращения к команде стоп. Если она равна 3, то остановить двигатель.
- Здесь я создал переменную отвечающую за скорость вращения.
- 1 это максимальная скорость. А 70 это очень медленное вращение. Эти цифра – это просто delay в цикле между шагами.
- А это названия которые будут выведены на кнопках.

Следующий код
- Весь этот HTML код отвечает за вывод на экран кнопок при включенном состоянии и выключенном.
- Это кодировка для распознавания русского шрифта.
- Это title страницы.
- Здесь все основные настройки. Такие как ширина и высота, размер шрифта и цвет шрифта. И другие. Всё это будет работать, если дальше в тексте не будут внесены изменения.
- Это вывод на экран заголовка. Заголовок 3 уровня и выравнивание по центру.
- Здесь мы показываем каким шрифтом, цветом фона и выравниванием по центру будет выведено состояние двигателя. Крутится ли он по часовой или против, или вообще остановлен.Этот код отвечает за состояние и цвет кнопок, во включенном или выключенном состоянии. Ширину кнопок я указал 310 пикселей.
 Заголовок 3 уровня и выравнивание по центру.
Заголовок 3 уровня и выравнивание по центру.
Такой setup мы уже рассматривали десятки раз. Указываем, что выводы ESP работают на выход. Подключаемся у WIFI сети и получаем IP адрес по которому будем заходить на web страницу и запускаем сервер.
В цикле loop обрабатываем значение нажатой кнопки.
Если статус 1, то поворачиваем двигатель по часовой, а если 2, то против часовой. А это тот delay который мы установили в начале кода, и который отвечает за скорость вращения.
Этот код устанавливает значения статуса двигателя в зависимости от полученных сервером значений.
Если на сервер пришёл ON, установить статус 1 и крутить мотор в одну сторону, если 2, то в другую, а если 3, то остановить двигатель.
А это сама команда на вращение или остановку.
Теперь давайте ещё раз посмотрим как работает наша схема.
При нажатии на кнопку, например по часовой, двигатель начинает вращаться по часовой стрелке. Если нажать против часовой, то двигатель сразу начнёт вращаться в другую сторону. Так, что остановка двигателя, пред сменой направления не обязательна.
Остановку можно произвести с помощью специальной кнопки или ещё раз нажав на активную в данный момент кнопку.
Состояние двигателя можно увидеть сверху или по красному фону кнопки.
Переключения происходят практически без задержек.
Если вам интересна эта тема, то я могу снять продолжение этого видео. Можно вывести на экран не только смену направления движения, но и скорость или количество градусов на которое повернётся двигатель.
Объём вашего интереса, я буду оценивать по количеству лайков и комментариев. Чем их будет больше, тем быстрее выйдет новое видео.
Ну, а если вам нравятся мои уроки, то ставьте лайк и делитесь моими видео, с другими.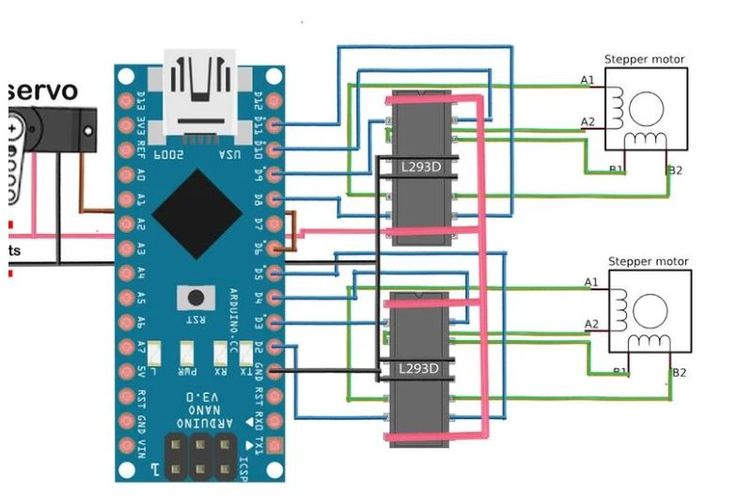 Это очень поможет мне в продвижении канала, а меня будет стимулировать выпускать уроки чаще и интереснее.
Это очень поможет мне в продвижении канала, а меня будет стимулировать выпускать уроки чаще и интереснее.
Вы видите ссылки на видео, которые, я думаю будут вам интересны. Перейдя на любое из этих видео вы узнаете что-то новое, а ещё поможете мне. Ведь любой ваш просмотр — это знак YOUTUBE, что это кому-то интересно и что его надо показывать чаще.
Спасибо.
А пока на этом всё.
Скетчи
Как подключить электродвигатель к Arduino
Существует множество способов, чтобы подключить малые электродвигатели к Arduino. И самым популярным, а также самым простым из них является подключение двигателя через мост типа H либо через транзисторы. Подключая электродвигатель к платформе Arduino, следует помнить о том, что подключение не должно осуществляться непосредственным способом, поскольку это может привести к повреждению программной платформы.
Зачем электродвигатели подключают к Arduino
Внедрение электродвигателей в создаваемые контуры и управление при помощи Arduino открывает много разнообразных возможностей. Основной целью подключения двигателей является возможность запуска в движение элементов создаваемых систем, создание транспортных средств и даже роботов. Благодаря Arduino, возможно управление как направлением вращения вала двигателя, так и скоростью вращения.
Основной целью подключения двигателей является возможность запуска в движение элементов создаваемых систем, создание транспортных средств и даже роботов. Благодаря Arduino, возможно управление как направлением вращения вала двигателя, так и скоростью вращения.
Подключение двигателя к Arduino должно осуществляться опосредствованно
Непосредственное подключение программной платформы не только грозит перегоранием выходного порта Arduino, но также ограничивает возможность управления, созданной таким образом системой, до минимума.
Arduino через каждый выходной порт может подавать ток силой около 20 мA, а каждый, даже самый маленький электродвигатель, доступный на рынке, для правильного функционирования требует от десятикратно до тысячекратно большего потребления. Поэтому необходимо подключение электродвигателя к Arduino опосредствованным способом, через соответствующий контроллер, который урегулирует силу подаваемого тока.
Какие двигатели можно подключить к Arduino и на что следует обращать внимание в процессе их выбора
Программная платформа Arduino обеспечивает включение всех низкоамперных электродвигателей, представленных на рынке.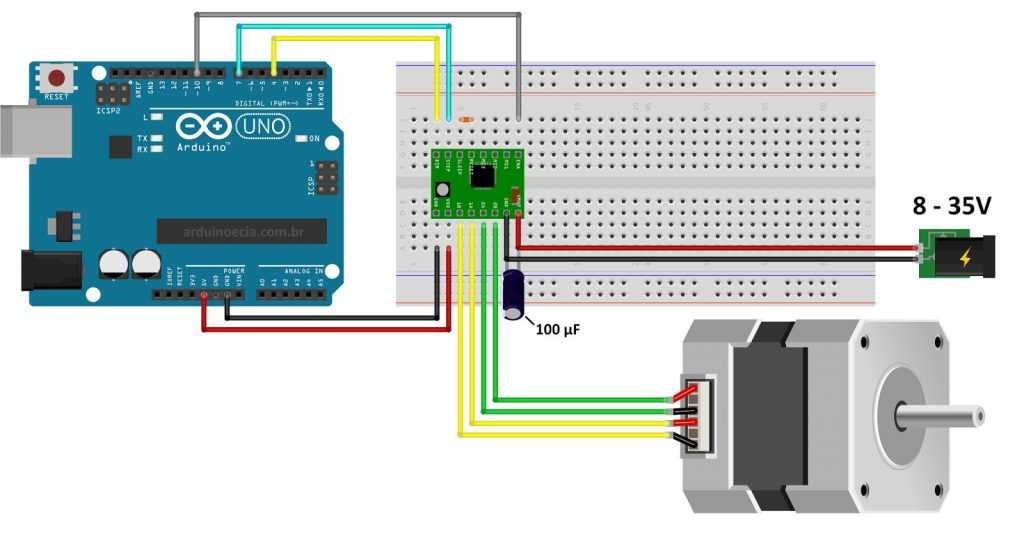 К Arduino можно подключить:
К Arduino можно подключить:
- бесщёточные двигатели BLDC с коммутатором,
- щёточные двигатели DC, которые являются самыми простыми электродвигателями с питанием током DC,
- вибрационные двигатели, которые посредством движения вала генерируют вибрацию,
- шаговые двигатели, обеспечивающие высокую точность управления посредством импульсного движения вала,
- туннельные приводы EDF, состоящие из ротора и двигателя с корпусом,
- линейные серводвигатели, обеспечивающие линейное движение,
- сервомеханизмы.
Параметры, на которые следует обратить внимание при выборе электродвигателя для Arduino, зависят от типа двигателя.
Несмотря на это, среди наиболее существенных из них следует указать:
- сила потребляемого тока [A]: параметр характеризует силу тока, который требуется для правильного запуска двигателя;
- номинальное напряжение [В]: это значение напряжения, на котором будет функционировать система; стандартно системы с Arduino работают на напряжении 12В;
- крутящий момент [Нм]: ключевой параметр электродвигателя (и не только), определяющий его мощность; чем больший крутящий момент генерирует двигатель, тем он мощнее;
- скорость вращения [об. /мин]: параметр, определяющий скорость вращения вала двигателя,
- масса и габариты [г и мм]: эти параметры являются существенными особенно при создании лёгких систем, в которых принимаются во внимание размеры двигателя,
- разрешающая способность [количество шагов]: этот параметр касается исключительно шаговых двигателей и определяет точность, с которой может двигаться вал шагового двигателя,
- линейная скорость [мм/с]: этот параметр касается исключительно линейных двигателей и характеризует скорость, с которой двигатель может выдвигать вал в линейном направлении.
 /мин]: параметр, определяющий скорость вращения вала двигателя,
/мин]: параметр, определяющий скорость вращения вала двигателя,
Как подключить электродвигатель к Arduino
Зная виды двигателей, которые можно подключить к Arduino, и параметры, на которые следует обратить внимание во время их подбора, мы можем приступить к работам по подключению. Легче всего подключить стандартные щёточные двигатели DC, вибрационные двигатели и сервомеханизмы. Несколько сложнее подключаются линейные серводвигатели, шаговые двигатели и насосы.
Щёточные двигатели DC и вибрационные двигатели являются наиболее простыми, они чаще всего бывают представлены в системах и одновременно являются самыми лёгкими в подключении электродвигателями. Стандартно к программной платформе подключаются двигатели с силой тока 1-5A, работающие на напряжении 5-9В. Для более мощных двигателей с большими параметрами применяются специальные контроллеры.
Щёточные двигатели DC и вибрационные двигатели можно подключить при помощи системы с транзистором либо через мост типа H. Первый метод позволяет осуществлять управление только скоростью вращения вала двигателя, а метод подключения через мост обеспечивает управление как скоростью, так и направлением вращения вала. Поэтому также следует подобрать соответствующий метод подключения согласно собственным потребностям и целям.
Подключение щёточного двигателя DC и вибрационного двигателя через транзистор
Подключение щёточного двигателя DC и вибрационного двигателя при помощи транзистора является очень простым и требует только трёх компонентов: ограничивающего резистора, выпрямительного диода и транзистора. В системе можно использовать, например: выпрямительный диод 1N4148 или 1N4007, транзистор 2N2222 и ограничивающий резистор с сопротивлением 10 кОм. Работы по подключению следует начать с выбора контакта Arduino с соответствующим выходным напряжением.
В системе можно использовать, например: выпрямительный диод 1N4148 или 1N4007, транзистор 2N2222 и ограничивающий резистор с сопротивлением 10 кОм. Работы по подключению следует начать с выбора контакта Arduino с соответствующим выходным напряжением.
Контакт Arduino подсоединяем на контактной плате к резистору и в самом конце — к базе транзистора. Эмиттер транзистора мы заземляем, а его коллектор подключаем к двигателю через параллельно подключённый выпрямительный диод. С другой стороны двигатель следует подключить к питанию. Резистор в схеме ограничивает силу тока, который поступает к транзистору, а выпрямительный диод ограничивает риск возникновения обратных токов и выбросов (скачков напряжения), которые имеют место при включении системы. Обратные токи и пики могли бы привести к повреждению программной платформы.
Подключение через мост типа H
Этот способ подключения гарантирует возможность управления не только скоростью, но и направлением вращения вала двигателя. Насколько в случае вибрационных двигателей управление направлением вращения их вала обычно является необоснованным (поскольку они будут генерировать вибрацию вне зависимости от направления вращения вала), настолько управление валом щёточного двигателя DC обычно является ключевой функциональностью системы.
Более того, через мост типа H можно также подключить линейный серводвигатель, если его конструкция основывается на двигателе DC. Мосты типа H можно самостоятельно построить из нескольких транзисторов либо приобрести готовые системы. Их основным заданием является приём сигнала, который посылается Arduino, и трансформация его параметров на выходе моста. Если мы хотим подключить щёточные двигатели DC, вибрационные либо линейные двигатели, необходимо оснастить его ограничивающим резистором (например, с сопротивлением 10 кОм), переключателем и готовой системой моста типа H (например, SN754410, L29NE или L293D).
Мост типа H следует подобрать к системе в плане интенсивности потребляемого двигателем тока во время его максимальной нагрузки – этот параметр носит название токовой эффективности моста. Каждый мост типа H может характеризоваться несколько отличным строением и выводом контактов, поэтому перед тем, как приступить к работам по подключению, следует верифицировать схему вывода контактов в техническом описании моста. Чтобы выяснить способ подключения электродвигателя к Arduino, мы используем мост L293D. Мост L293D оснащен следующими контактами:
Чтобы выяснить способ подключения электродвигателя к Arduino, мы используем мост L293D. Мост L293D оснащен следующими контактами:
- контакт 1: отвечает за управление скоростью двигателя,
- контакты 2 и 7: отвечают за направление вращения вала двигателя,
- контакт 8: питание VC до 36 В,
- контакт 9: может управлять скоростью второго подключённого двигателя,
- контакты 10 и 15: могут управлять направлением вращения вала второго подключённого двигателя,
- контакт 16: питание VCC до 5 В,
- контакты: 4, 5, 12 и 13: заземляемые (подключаемые к земле (GND)).
Первым шагом подключения является размещение моста типа H на контактной плате. После этого следует подключить массу моста к питанию, а затем подключить питание двигателя (или двигателей). Предпоследним этапом работ по подключению является электропитание логической системы управления мостом, последним этапом — подключение контактов, отвечающих за управление работой двигателя (либо двигателей).
Перед началом подключения следует помнить о том, что система моста типа H с электрическим двигателем может быть запитана от одного либо двух напряжений. Если мы запитаем её от одного напряжения, необходимо будет использование источника питания, имеющего соответствующую хорошую фильтрацию, которая ограничит риск возникновения помех.
Лучшим, более популярным и безопасным решением является питание системы от двух источников. Тогда работа двигателя будет запитана от моста, а логическая часть моста (управляющая рабой двигателя) будет запитана от другого независимого источника. Поэтому 5-вольтный контакт Arduino стоит подключить к логичной части моста, а остальное питание к контактам моста, которые отвечают за управление двигателем.
Подключение сервомеханизмов
Подключение сервомеханизмов является чрезвычайно простым, поскольку их выходы всегда одинаковы. Подключение сервомеханизма к Arduino следует начать с подключения массы питания двигателя и питания системы (обычно это два 5-вольтных источника питания).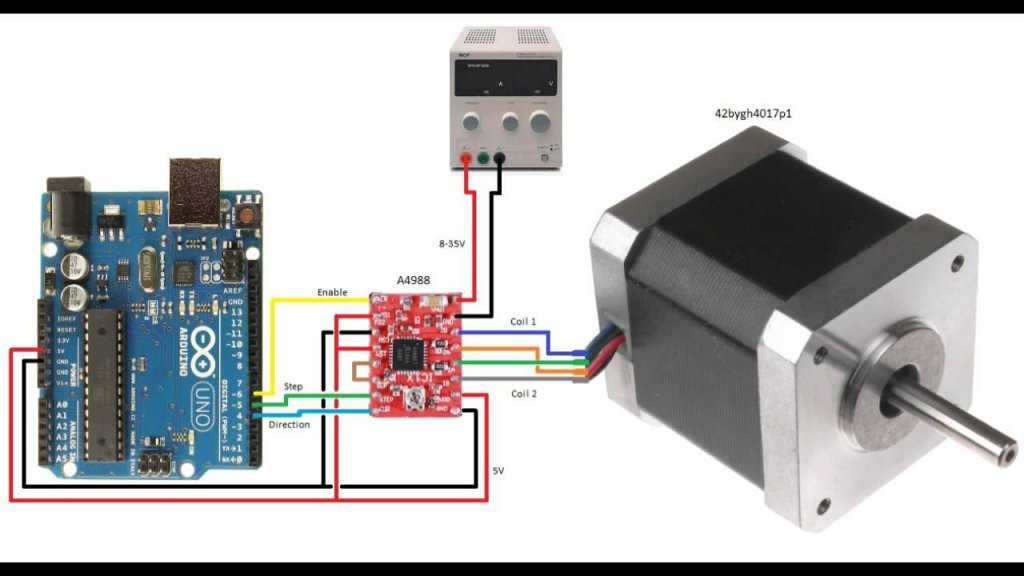
Следующим шагом является подключение выхода PWM Arduino (обозначенного знаком «~») к контакту, который управляет сервомеханизмом. После проведения работ по подключению, следует только записать соответствующую библиотеку. Подключение шаговых двигателей через выделенный контроллер Шаговые двигатели подключаются к Arduino опосредствованно через специальные контроллеры. Эти элементы следует подобрать друг к другу с учётом максимальной интенсивности тока и номинального напряжения, а сам контроллер должен соответствовать как напряжению питания двигателя, так и напряжению питания системы.
Токовая эффективность контроллера должна быть выше, чем максимальная интенсивность тока, потребляемого двигателем. Для потребностей текста следует исходить из того, что необходимо подключить к Arduino шаговый двигатель с напряжением 12В. К нему подходит, например, контроллер A4988.
Сначала мы устанавливаем контроллер на контактной плате, после чего контакты GND и VDD подключаем к питанию контроллера (3-5,5В). Контакты GMD и VMOT подключаются к питанию двигателя, а контакт SLP — к RST. Контакты 1A, 2A, 1B и 2B подключаются к двигателю.
Контакты GMD и VMOT подключаются к питанию двигателя, а контакт SLP — к RST. Контакты 1A, 2A, 1B и 2B подключаются к двигателю.
От вида шагового двигателя (того, является ли он биполярным или униполярным) зависит способ подключения контактов 1A, 2A, 1B и 2B. В биполярных двигателях контакт 1A подключается к чёрному кабелю двигателя, контакт 2A — к красному кабелю, контакт 1B — к зелёному кабелю, а контакт 2B — к голубому кабелю. Униполярные двигатели имеют шесть проводов, но жёлтый и белый кабель можно не подключать.
Правильное подключение шагового двигателя к Arduino приводит к тому, что для высокого положения вал двигателя вращается вправо, а для низкого положения — влево. Для нарастающего фронта вал двигателя делает один шаг, а его направление зависит от подключения контакта DIR.
Arduino — шаговый двигатель | Учебник по Arduino
ПРЕДУПРЕЖДЕНИЕ
Этот учебник в настоящее время обновляется.
| 1 | × | Arduino UNO or Genuino UNO | |
| 1 | × | USB 2. 0 cable type A/B 0 cable type A/B | |
| 1 | × | Arduino Моторный щит R3 | |
| 1 | × | Stepper Motor | |
| 1 | × | (Optional) 9V Power Adapter for Arduino | |
| 1 | × | (Optional) Screw Terminal Block Shield for Arduino |
Обратите внимание: это партнерские ссылки. Если вы покупаете компоненты по этим ссылкам, мы можем получить комиссию без каких-либо дополнительных затрат для вас. Мы ценим это.
Существует два типа шаговых двигателей: биполярный шаговый двигатель и униполярный шаговый двигатель. Они отличаются друг от друга внутренним устройством и принципом работы.
Невооруженным глазом они похожи друг на друга. Однако мы можем отличить их по количеству проводов. Биполярный двигатель обычно имеет четыре провода. Униполярный двигатель обычно имеет шесть проводов.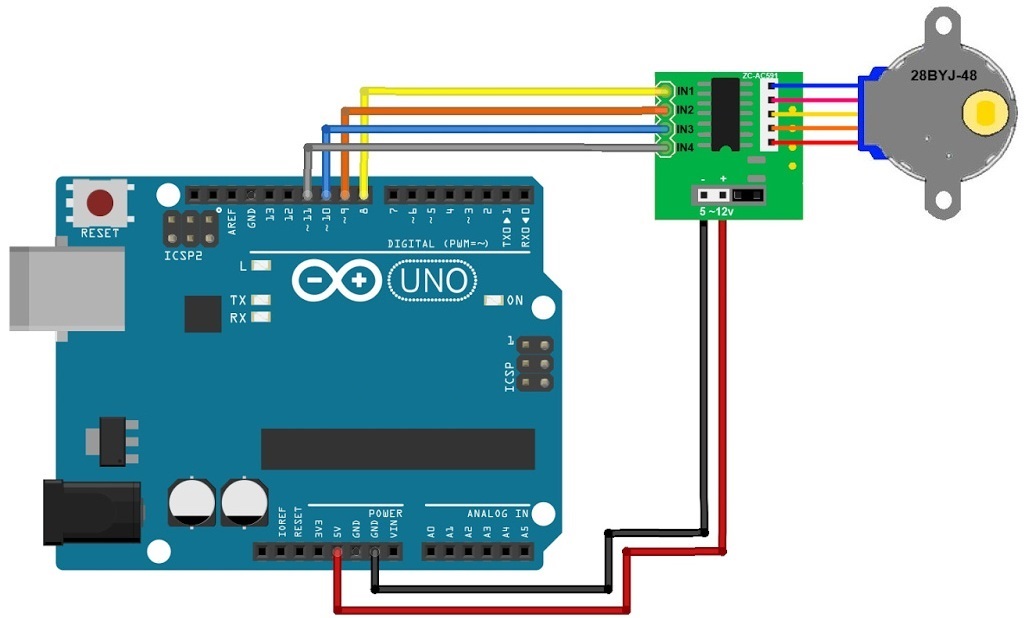
Управление биполярным и униполярным шаговым двигателями отличается. К счастью, мы можем управлять униполярным шаговым двигателем, как если бы это был биполярный шаговый двигатель, используя четыре из шести проводов.
Шаговый двигатель требует больше энергии, чем может ему дать плата Arduino, поэтому для него вам понадобится другой блок питания. В идеале в паспорте или руководстве по шаговому двигателю указано напряжение источника питания.
Мы НЕ МОЖЕМ подключить шаговый двигатель напрямую к Arduino. Мы ДОЛЖНЫ подключаться через драйвер двигателя или контроллер двигателя.
Драйвер двигателя и контроллер двигателя могут быть:
Чип (например, SN754410)
Модуль (например, A4988)
Shield (например, Arduino Motor Shield Rev3, контроллер шагового двигателя PES-2605, Adafruit Motor/Stepper/Servo Shield)
Чтобы облегчить задачу новичкам, мы рекомендуем использовать один из следующих щитов:
Arduino Motor Shield Rev3: это официальный шилд от Arduino.
Контроллер шагового двигателя PES-2605: очень прост в использовании. Кроме того, его библиотека поддерживает различные функции. Он поддерживает метод микрошагов, который обеспечивает плавное движение шагового двигателя. Компания, производящая этот щит, хорошо предоставила документацию и учебные пособия. Однако, чтобы использовать этот щит, нам нужно использовать его вместе с шилдом PHPoC WiFi. Это НЕ добавляет трудностей, но увеличивает стоимость.

Если стоимость для вас не имеет значения, мы рекомендуем использовать контроллер шагового двигателя PES-2605.
Если вам нужно сэкономить, мы рекомендуем использовать Arduino Motor Shield Rev3.
Стек Arduino Motor Shield Rev3 на Arduino Uno
Подключите шаговый двигатель к Arduino Motor Shield Rev3
Это изображение создано с помощью Fritzing. Нажмите, чтобы увеличить изображение
Загрузите или скопируйте приведенный выше код и откройте с помощью Arduino IDE
Нажмите кнопку «Загрузить» в Arduino IDE, чтобы загрузить код в Arduino
Откройте Serial Monitor, чтобы увидеть результат:
Автопрокрутка
Показать временную метку
Очистить вывод
9600 бод
Новая строка
Мы планируем сделать видеоуроки. Если вы считаете, что видеоуроки необходимы, подпишитесь на наш канал YouTube , чтобы дать нам мотивацию для создания видео.
Если вы считаете, что видеоуроки необходимы, подпишитесь на наш канал YouTube , чтобы дать нам мотивацию для создания видео.
НЕ беспокойтесь, если шаговый двигатель вибрирует во время движения. Это характеристика шагового двигателя. Мы можем уменьшить вибрацию, используя метод микрошагового управления.
Кроме того, из-за этой характеристики при правильном управлении шаговый двигатель может издавать музыкальные звуки, как если бы он был музыкальным инструментом. Вы можете увидеть этот проект на Arduino Project Hub.
Полный шаг: единицей перемещения является один шаг, который эквивалентен значению градуса, указанному в техническом описании или руководстве по шаговому двигателю.
Полушаг: каждый полный шаг делится на два меньших шага. Единицей перемещения является половина полного шага. Этот метод позволяет двигателю двигаться с двойным разрешением.
Микрошаг: каждый полный шаг делит на множество меньших шагов. Единицей перемещения является часть полного шага.
Дробь может быть 1/4, 1/8, 1/16, 1/32 и даже больше. Этот метод позволяет двигателю двигаться с более высоким разрешением. Это также делает двигатель более плавным на низких скоростях. Чем больше дивиденд, тем выше разрешение и плавнее движение.
 Дробь может быть 1/4, 1/8, 1/16, 1/32 и даже больше. Этот метод позволяет двигателю двигаться с более высоким разрешением. Это также делает двигатель более плавным на низких скоростях. Чем больше дивиденд, тем выше разрешение и плавнее движение.
Дробь может быть 1/4, 1/8, 1/16, 1/32 и даже больше. Этот метод позволяет двигателю двигаться с более высоким разрешением. Это также делает двигатель более плавным на низких скоростях. Чем больше дивиденд, тем выше разрешение и плавнее движение.Например, если в техническом описании двигателя указано 1,8 градуса/шаг:
Полный шаг: двигатель может двигаться с шагом 1,8 градуса/шаг <⇒ 200 шагов/оборот
Полушаг: Двигатель может двигаться с шагом 0,9 градуса/шаг <⇒ 400 шагов/оборот
Микрошаг: Двигатель может двигаться с шагом 0,45, 0,225, 1125, 0,05625 градуса/шаг <⇒ 800, 1600, 3200, 6400... шагов/оборот
Приведенный выше код использовал полношаговый метод управления.
Это расширенное использование. Новичкам не нужно обращать на это внимание. Это происходит в диапазоне скоростей, в котором скорость шага равна собственной частоте двигателя. Может быть слышно изменение шума двигателя, а также усиление вибрации. В реальных приложениях разработчик ДОЛЖЕН обратить внимание на этот вопрос.
В реальных приложениях разработчик ДОЛЖЕН обратить внимание на этот вопрос.
Посмотрите лучший комплект Arduino для начинающих
※ НАШИ СООБЩЕНИЯ
МОЖНО АРЕНДА. Узнайте, как нанять нас для создания вашего проекта
Если этот урок полезен для вас, пожалуйста, мотивируйте нас делать больше уроков.
Вы можете поделиться ссылкой на это руководство где угодно. Однако, пожалуйста, не копируйте контент для публикации на других сайтах. Мы потратили много времени и сил на создание содержания этого урока, пожалуйста, уважайте нашу работу!
Подписывайтесь на нас
Поделись с друзьями!
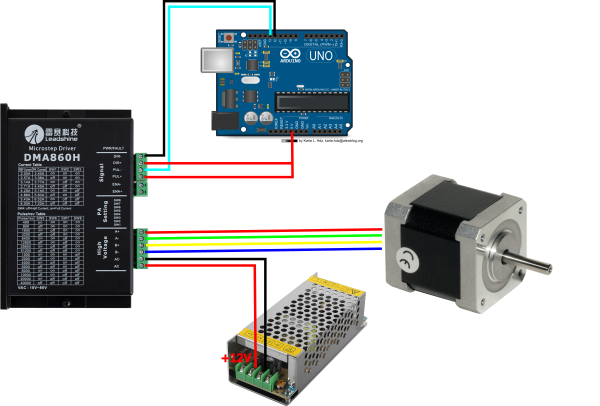
TB6600 Драйвер шагового двигателя Arduino
Введение
Что такое шаговый двигатель?
Шаговый двигатель представляет собой бесщеточный электродвигатель постоянного тока, который делит полный оборот на несколько равных шагов. Затем можно задать положение двигателя для перемещения и удержания на одном из этих шагов.
Затем можно задать положение двигателя для перемещения и удержания на одном из этих шагов.
Как управлять шаговым двигателем?
Быстрый способ управления шаговым двигателем — это использование драйвера (контроллера) шагового двигателя. И TB6600 arduino — это как раз то, что вам нужно.
TB6600 arduino — это простой в использовании профессиональный драйвер шагового двигателя, который может управлять двухфазным шаговым двигателем. Он совместим с Arduino и другими микроконтроллерами, которые могут выводить цифровой импульсный сигнал 5 В. Драйвер шагового двигателя TB6600 arduino имеет широкий диапазон потребляемой мощности, источник питания 9 ~ 42 В постоянного тока. И он способен выдавать пиковый ток 4А, чего достаточно для большинства шаговых двигателей.
Драйвер шагового двигателя поддерживает управление скоростью и направлением. Вы можете установить его микрошаг и выходной ток с помощью 6 DIP-переключателей. Имеется 7 видов микрошагов (1, 2/A, 2/B, 4, 8, 16, 32) и 8 видов контроля тока (0,5А, 1А, 1,5А, 2А, 2,5А, 2,8А, 3,0А). А, 3,5А) всего. И все сигнальные клеммы используют высокоскоростную изоляцию оптопары, что повышает ее способность противостоять высокочастотным помехам.
А, 3,5А) всего. И все сигнальные клеммы используют высокоскоростную изоляцию оптопары, что повышает ее способность противостоять высокочастотным помехам.
Как профессиональное устройство, он может управлять двухфазным, четырехфазным гибридным шаговым двигателем типа 57, 42.
Примечание: это новейшая обновленная версия драйвера шагового двигателя TB6600.
DIY Alarm с использованием домашнего помощника, Konnected и Sonoff RF Bridge
TB6600 5A Стап -мотор и Arduino
Hardwares You Tren Arduino
. текущий контроль
Спецификация