Содержание
Электродвигатель постоянного тока: схема подключения, принцип работы
Статьи
Автор Светозар Тюменский На чтение 3 мин. Просмотров 14k. Опубликовано
Обновлено
Электродвигатели постоянного тока действуют на основе использования принципа магнитной индукции и применяются на производстве в тех случаях, когда необходимо обеспечить регулировку скорости вращения в различных диапазонах, но с высокой точностью. На сегодняшний день существует множество вариантов исполнения электродвигателей постоянного тока. В зависимости от необходимой мощности их работа может обеспечиваться как за счет постоянных магнитов, так и за счет электромагнитов.
Содержание
- Схема подключения электродвигателя постоянного тока
- Устройство электродвигателя постоянного тока
- Принцип действия электродвигателя постоянного тока
- Электродвигатель постоянного тока 12 Вольт
- Электродвигатель постоянного тока П -11 С1 У4 работа
- Двигатель постоянного тока (часть 1)
- Электродвигатели постоянного тока
Схема подключения электродвигателя постоянного тока
Если попробовать отобразить устройство электродвигателя постоянного тока схематически, то у нас получится изображение с двумя цилиндрами, помещенными один в другой. Больший из цилиндров является полым и неподвижным и называется статор или же станина. Внутри станины помещается якорь – меньший из цилиндров, являющийся подвижным. При этом между цилиндрами внутри, в обязательном порядке, должно быть воздушное пространство и они не должны вплотную соприкасаться. Это необходимо, поскольку именно в воздушном зазоре формируется магнитное поле.
Устройство электродвигателя постоянного тока
Любой электродвигатель состоит из двух основных частей станины (статора) и якоря. На внутренней поверхности статора располагаются полюсы, которые изготавливаются из тонких листов электротехнической стали, изолируются друг от друга при помощи лака и заканчиваются расширениями – наконечниками. Эти наконечники предназначены для равномерного распределения магнитной индукции в воздушном зазоре. Уже непосредственно на самих полюсах располагаются несколько обмоток возбуждения. При этом некоторые из обмоток изготавливаются с большим количеством витков тонкого провода, в то время как конструкция других предполагает малое число витков толстого провода.
Якорь представляет собой зубчатый цилиндр, который устанавливается на валу внутри статора и состоит из пакетов тонких листов электротехнической стали изолированных друг от друга. Стоит отметить, что между каждым отдельным пакетом находятся специальные каналы, предназначенные для вентиляции.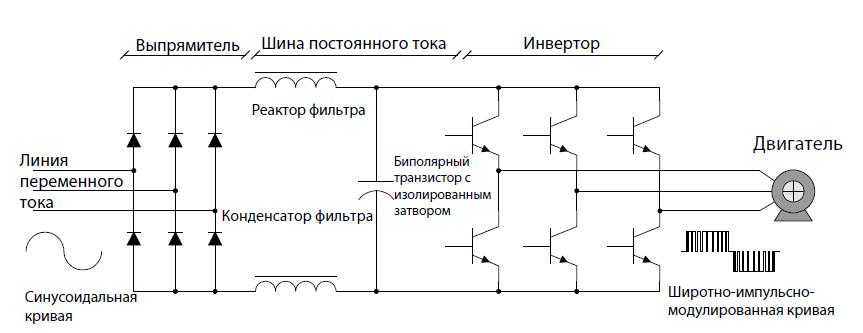 В то же время отдельные пазы якоря соединяются между собой проводниками, выполненными из меди. Также необходимым условием при изготовлении якоря является наличие двухслойной обмотки.
В то же время отдельные пазы якоря соединяются между собой проводниками, выполненными из меди. Также необходимым условием при изготовлении якоря является наличие двухслойной обмотки.
Принцип действия электродвигателя постоянного тока
В основе принципа работы любого современного электродвигателя постоянного тока лежит принцип магнитной индукции, а также «Правило левой руки». В том случае, если по верхней части обмотки якоря пропустить ток в одном направлении, а по нижней в другом, то он начнет вращаться. Это обусловлено тем, что по правилу левой руки, проводники, которые уложены непосредственно в пазах якоря, будут выталкиваться из магнитного поля, которое создается станиной.
Таким образом, верхняя часть будет выталкиваться влево, а нижняя – вправо, что приведет к вращению самого якоря, поскольку вся энергия от проводников будет передаваться и ему. Однако, в тот момент, когда проводники провернутся и части якоря поменяются местами расположения, его вращение остановится. Чтобы этого не случилось, в электродвигателе применяется коллектор, предназначенный для коммутирования обмотки якоря.
Чтобы этого не случилось, в электродвигателе применяется коллектор, предназначенный для коммутирования обмотки якоря.
Электродвигатель постоянного тока 12 Вольт
На сегодняшний день этот тип электродвигателей является одним из самых популярных. Это обусловлено тем, что именно двигатели с таким напряжением устанавливаются на большинство автомобилей и не только на них, но и на множество другой техники, которая применяется для решения самых разнообразных задач.
Электродвигатель постоянного тока П -11 С1 У4 работа
Двигатель постоянного тока (часть 1)
Электродвигатели постоянного тока
Оцените автора
Способы запуска электродвигателя постоянного тока: рабочие схемы
Хорошие тяговые характеристики электрических машин постоянного тока сделали их неотъемлемым элементом большинства устройств промышленной и бытовой механизации. Но вместе с тем возникает и существенная проблема значительных пусковых токов, в сравнении с асинхронными электродвигателями, работающих на переменном напряжении. Именно поэтому многие специалисты детально изучают способы запуска электродвигателя постоянного тока, прежде чем включить агрегат.
Но вместе с тем возникает и существенная проблема значительных пусковых токов, в сравнении с асинхронными электродвигателями, работающих на переменном напряжении. Именно поэтому многие специалисты детально изучают способы запуска электродвигателя постоянного тока, прежде чем включить агрегат.
Прямой пуск
Из всех электродвигателей постоянного тока основная градация при выборе способа их запуска должна учитывать мощность устройства.
В целом выделяют три вида пуска:
- малой мощности;
- средней;
- большой мощности.
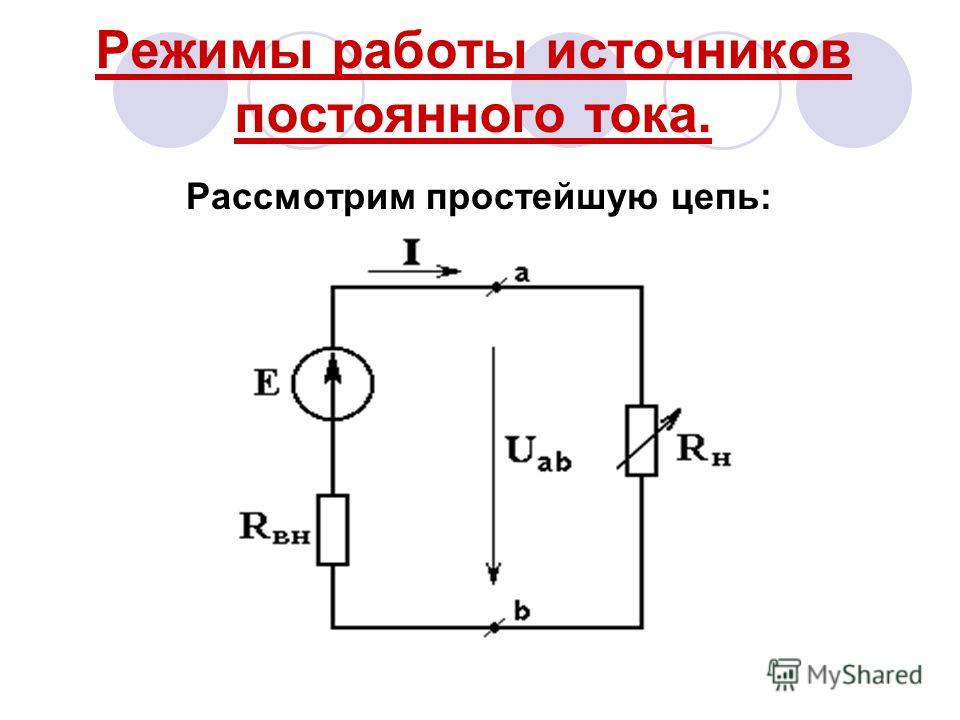
Для прямого запуска подойдут только маломощные электродвигатели, которые потребляют до 1кВт электроэнергии в сети. При прямых запусках электродвигателя все напряжение сразу подается на рабочую обмотку. Это обуславливает возникновение максимального пускового тока из-за отсутствия естественной компенсации за счет ЭДС противодействия.
С физической точки зрения ситуация в обмотках ротора будет выглядеть следующим образом: в момент подачи напряжения сила тока в обмотках равна нулю, поэтому его значение будет определяться по формуле:
I = U/Rобм, где
U – приложенная к выводам номинальное напряжение, Rобм – сопротивление катушки.
В этот момент величина токовой нагрузки электродвигателя постоянного тока является максимальной, он может отличаться от номинального значения в 1,5 – 2,5 раза. После этого протекание тока обуславливает генерацию ЭДС противодействия, которая компенсирует пусковую нагрузку до установки номинальной мощности, тогда ток станет:
I = (U – Eпрот)/Rобм
В мощных устройствах сопротивление обмоток якоря может равняться 1 или 0,5 Ом, из-за чего ток при запуске электродвигателя может достигнуть 200 – 500 А, что в 10 – 50 раз будет превышать допустимые величины. Это, в свою очередь, может привести к термическому отпуску металла, деформации проводников, разрушению колец или щеток скользящего контакта. Поэтому двигатели постоянного тока средней и большой мощности должны вводиться в работу реостатным запуском или путем подачи заведомо пониженного напряжения, прямой пуск для них крайне опасен.
Пуск с помощью пускового реостата
В этом случае в цепь вводится переменное сопротивление, которое на начальном этапе обеспечивает снижение токовой нагрузки, пока вращение ротора не достигнет установленных оборотов.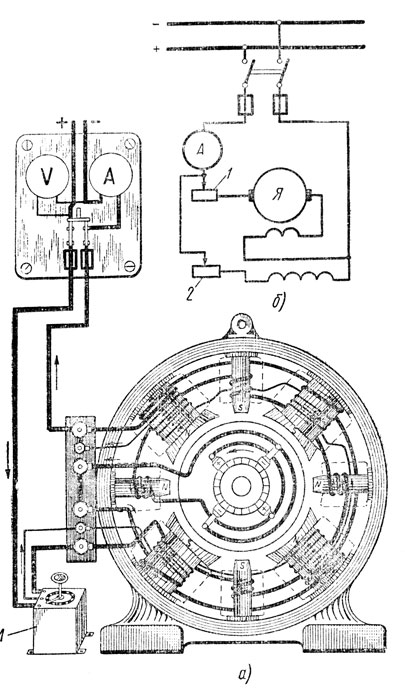 По мере стабилизации ампеража до стандартной величины в реостате уменьшается сопротивление от максимального значения до минимального.
По мере стабилизации ампеража до стандартной величины в реостате уменьшается сопротивление от максимального значения до минимального.
Расчет электрической величины в этом случае будет производиться по формуле:
I = U / (Rобм + Rреостата)
В лабораторных условиях уменьшение нагрузки может производиться вручную – посредством перемещения ползунка реостата. Однако в промышленности такой метод не получил широкого распространения, так как процесс не согласовывается с токовыми величинами. Поэтому применяется регулировка по току, по ЭДС или по времени, в первом случае задействуется измерение величины в обмотках возбуждения, во втором, на каждую ступень применяется выдержка времени.
Оба метода используются для запуска электродвигателей:
- с последовательным;
- с параллельным возбуждением;
- с независимым возбуждением.
Запуск ДПТ с параллельным возбуждением
Такой запуск электродвигателя осуществляется посредством включения и обмотки возбуждения, и якорной к напряжению питания электросети, друг относительно друга они располагаются параллельно. То есть каждая из обмоток электродвигателя постоянного тока находятся под одинаковой разностью потенциалов. Этот метод запуска обеспечивает жесткий режим работы, используемый в станочном оборудовании. Токовая нагрузка во вспомогательной обмотке при запуске имеет сравнительно меньший ток, чем обмотки статора или ротора.
То есть каждая из обмоток электродвигателя постоянного тока находятся под одинаковой разностью потенциалов. Этот метод запуска обеспечивает жесткий режим работы, используемый в станочном оборудовании. Токовая нагрузка во вспомогательной обмотке при запуске имеет сравнительно меньший ток, чем обмотки статора или ротора.
Для контроля пусковых характеристик сопротивления вводятся в обе цепи:
Рис 1. Запуск ДПТ с параллельным возбуждением
На начальном этапе вращения вала позиции реостата обеспечивают снижение нагрузки на электродвигатель, а затем их обратно выводят в положение нулевого сопротивления. При затяжных запусках выполняется автоматизация и комбинация нескольких ступеней пусковых реостатов или отдельных резисторов, пример такой схемы включения приведен на рисунке ниже:
Рис. 2. Ступенчатый пуск двигателя параллельного возбуждения
- При подаче напряжения питания на электродвигатель ток, протекающий через рабочие обмотки и обмотку возбуждения, за счет магазина сопротивлений Rпуск1, Rпуск2, Rпуск3 нагрузка ограничивается до минимальной величины.

- После достижения порогового значения минимума токовой величины происходит последовательное срабатывание реле K1, K2, K3.
- В результате замыкания контактов реле K1.1 шунтируется первый резистор, рабочая характеристика в цепи питания электродвигателя скачкообразно повышается.
- Но после снижения ниже установленного предела замыкаются контакты K2.2 и процесс повторяется снова, пока электрическая машина не достигнет номинальной частоты вращения.
Торможение электродвигателя постоянного тока может производиться в обратной последовательности за счет тех же резисторов.
Запуск ДПТ с последовательным возбуждением
Рис. 3. Запуск ДПТ с последовательным возбуждением
На рисунке выше приведена принципиальная схема подключения электродвигателя с последовательным возбуждением. Ее отличительная особенность заключается в последовательном соединении катушки возбуждения Lвозбуждения и непосредственно мотора, переменное сопротивление Rякоря также вводится последовательно.
По цепи обеих катушек протекает одинаковая токовая величина, эта схема обладает хорошими параметрами запуска, поэтому ее часто используют в электрическом транспорте. Такой электродвигатель запрещено включать без усилия на валу, а регулирование частоты осуществляется в соответствии с нагрузкой.
Пуск ДПТ с независимым возбуждением
Подключение электродвигателя в цепь с независимым возбуждением производится путем ее запитки от отдельного источника.
Рис. 4. Запуск ДПТ с независимым возбуждением
На схеме приведен пример независимого подключения, здесь катушка Lвозбуждения и сопротивление в ее цепи Rвозбуждения получают питание отдельно от обмоток двигателя током независимого устройства. Для обмоток двигателя также включается регулировочный реостат Rякоря. При этом способе запуска машина постоянного тока не должна включаться без нагрузки или с минимальным усилием на валу, так как это приведет к нарастанию оборотов и последующей поломке.
Пуск путем изменения питающего напряжения
Одним из вариантов снижения токовой нагрузки при запуске электродвигателя является уменьшение питающего номинала посредством генератора постоянного напряжения или управляемого выпрямителя.
С физической точки зрения установка реостата обеспечивает тот же эффект, но с увеличением мощности электродвигателя возрастает и постоянная токовая нагрузка, существенно повышаются потери на реостатах. Поэтому снижение постоянного напряжения выполняет отдельное устройство на базе микросхемы, пример которого приведен на рисунке ниже:
Рис. 5. Схема пуска с изменением питающего напряжения
Как подключить бесщеточные двигатели постоянного тока к электронному контроллеру
Подключение бесщеточных двигателей постоянного тока к электронным контроллерам двигателей осложняется тем фактом, что для правильной работы фазные провода двигателя и провода датчиков должны быть подключены к электронному контроллеру двигателя с точной конфигурацией фаз. . Во многих случаях информация, необходимая для определения правильного подключения датчика двигателя и фазного провода к электронному контроллеру двигателя, недоступна и должна быть получена путем измерения. В этой статье объясняется важность фазовой зависимости между датчиком двигателя и фазовыми выводами, а также то, как эту взаимосвязь можно измерить. Наконец, объясняется, как обеспечить правильное подключение фазы двигателя и сигнальных проводов к электронному контроллеру двигателя.
. Во многих случаях информация, необходимая для определения правильного подключения датчика двигателя и фазного провода к электронному контроллеру двигателя, недоступна и должна быть получена путем измерения. В этой статье объясняется важность фазовой зависимости между датчиком двигателя и фазовыми выводами, а также то, как эту взаимосвязь можно измерить. Наконец, объясняется, как обеспечить правильное подключение фазы двигателя и сигнальных проводов к электронному контроллеру двигателя.
Датчик
Датчики Холла на бесщеточных двигателях постоянного тока обеспечивают положение магнитного полюса на роторе двигателя (вращающийся элемент) относительно обмоток фазной катушки двигателя на статоре двигателя (неподвижный элемент). Датчики Холла используются для указания того, на какую фазную обмотку статора нужно подать питание, чтобы создать максимальный крутящий момент двигателя в желаемом направлении вращения.
Подача электрического тока в фазные катушки двигателя создает электромагнитный полюс на периферии статора, притягивая магнитный полюс к ротору, создавая крутящий момент и вращение на валу двигателя. Максимальный крутящий момент двигателя создается за счет создания электромагнитного полюса на периферии статора на расстоянии 90 градусов (в квадратуре) относительно магнитного полюса ротора. Вращающееся магнитное поле на периферии статора получается за счет последовательного возбуждения фазных катушек двигателя, по существу создавая вращающийся электромагнит на периферии статора. Электромагнитный полюс, генерируемый на периферии статора, должен синхронно вращаться вокруг периферии статора с той же скоростью вращения, что и магнитный полюс ротора, чтобы создавать постоянный крутящий момент. Вращающийся магнитный полюс ротора синхронно следует за вращающимся магнитным полюсом статора по периферии статора. Относительное положение между вращающимися магнитными полюсами статора и ротора в идеале остается фиксированным в квадратурном угловом положении, создавая максимальный постоянный крутящий момент, когда оба магнитных полюса вращаются с одинаковой скоростью. Ссылка на анимацию работы бесколлекторного двигателя постоянного тока приведена в глоссарии в качестве наглядного пособия для понимания этой концепции.
Максимальный крутящий момент двигателя создается за счет создания электромагнитного полюса на периферии статора на расстоянии 90 градусов (в квадратуре) относительно магнитного полюса ротора. Вращающееся магнитное поле на периферии статора получается за счет последовательного возбуждения фазных катушек двигателя, по существу создавая вращающийся электромагнит на периферии статора. Электромагнитный полюс, генерируемый на периферии статора, должен синхронно вращаться вокруг периферии статора с той же скоростью вращения, что и магнитный полюс ротора, чтобы создавать постоянный крутящий момент. Вращающийся магнитный полюс ротора синхронно следует за вращающимся магнитным полюсом статора по периферии статора. Относительное положение между вращающимися магнитными полюсами статора и ротора в идеале остается фиксированным в квадратурном угловом положении, создавая максимальный постоянный крутящий момент, когда оба магнитных полюса вращаются с одинаковой скоростью. Ссылка на анимацию работы бесколлекторного двигателя постоянного тока приведена в глоссарии в качестве наглядного пособия для понимания этой концепции.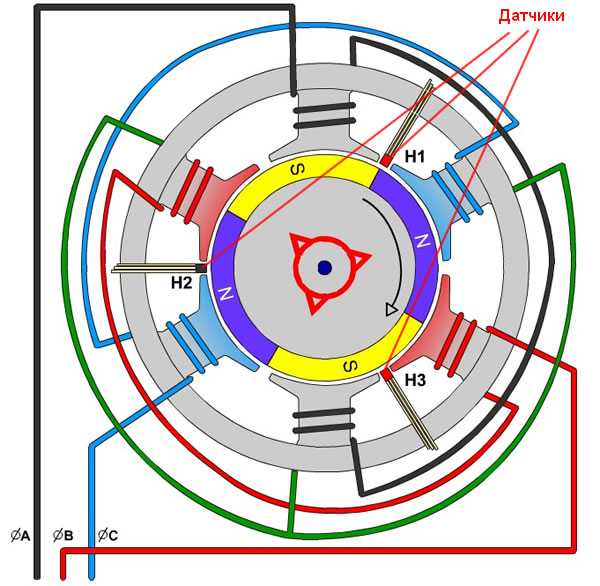
Три датчика Холла расположены на одинаковом угловом расстоянии друг от друга, чтобы определить положение магнитного полюса ротора относительно трех равноудаленных фазных обмоток двигателя (рис. 1). Три состояния переключателя датчика Холла используются для указания того, на какие обмотки фазы двигателя следует подавать питание для создания максимального крутящего момента на роторе.
| Рисунок 1 Иллюстрация размещения датчика Холла на периферии статора двигателя для определения положения магнитных полюсов ротора относительно полюсов статора двигателя |
Зависимость между состояниями переключателя на эффекте Холла и оптимальным возбуждением фазных катушек двигателя может быть представлена в табличной форме. Пример приведен ниже (рис. 2):
Рисунок 2. Таблица состояний датчика Холла и фазы возбуждения двигателя для создания максимального крутящего момента в требуемом направлении вращения. Таблица состояний датчика Холла и фазы возбуждения двигателя для создания максимального крутящего момента в требуемом направлении вращения. |
Методы
Существует множество различных номенклатур для обозначения трехфазных проводов бесщеточных двигателей постоянного тока. Типичные номенклатуры для обозначений фаз двигателя: [A,B,C], [R,S,T], [U,V,W] или [W1,W2, W3]. Для целей данного документа номенклатура маркировки [A, B, C] будет использоваться для обозначения фаз двигателя. Аналогичным образом, номенклатура датчика Холла, упоминаемая в этой статье, имеет вид [h2, h3 и h4], хотя другими типичными обозначениями являются [Hall 1, Hall 2 и Hall 3], [Hall A, B, C] или [Sensor 1, 2, 3].
Таблица взаимосвязи между состояниями датчика Холла, которая указывает положение ротора относительно фазных обмоток статора, может быть предоставлена изготовителем двигателя. Раздел № 1 описывает типичные форматы для этой информации. Если эта информация недоступна, то таблица должна быть создана путем измерения. Метод создания таблицы по измерению представлен в Разделе № 2. Раздел № 3 описывает, как использовать таблицы для правильного подключения двигателя к электронному контроллеру двигателя.
Если эта информация недоступна, то таблица должна быть создана путем измерения. Метод создания таблицы по измерению представлен в Разделе № 2. Раздел № 3 описывает, как использовать таблицы для правильного подключения двигателя к электронному контроллеру двигателя.
РАЗДЕЛЫ:
1. Информация в виде таблицы Холла
2. Использование метода подачи фазного тока для
Создание корреляционной таблицы датчика Холла двигателя
3. Подключение двигателя к электронному контроллеру
4. Другие методы измерения
5
Раздел 1: Таблица на основе Холла Предоставляется
Этот сценарий предпочтительнее, поскольку он не требует каких-либо прямых измерений двигателя или измерительного оборудования, но зависит от доступа к таблицам корреляции датчика Холла бесщеточного двигателя и электронного контроллера. Многие поставщики бесщеточных двигателей постоянного тока предоставляют информацию в паспорте двигателя, чтобы помочь определить правильную последовательность подключения двигателя к электронному контроллеру. Таблица корреляции бесщеточного двигателя и датчика Холла электронного контроллера обычно предоставляется в виде диаграммы или таблицы, которые могут иметь разные названия, такие как «Блоковая коммутация» или «Временная диаграмма бесщеточного двигателя постоянного тока». Обычно эти диаграммы иллюстрируют последовательность напряжения фазы двигателя или, альтернативно, состояние силовых переключателей фазы двигателя контроллера двигателя, коррелированное с состояниями датчика Холла в течение одного полного электрического цикла вращения. В таблице указано, на какие обмотки фазы двигателя следует подавать питание в зависимости от состояния переключателя датчика Холла, чтобы обеспечить оптимальный крутящий момент двигателя. Примеры каждого типа таблиц приведены ниже:
Таблица корреляции бесщеточного двигателя и датчика Холла электронного контроллера обычно предоставляется в виде диаграммы или таблицы, которые могут иметь разные названия, такие как «Блоковая коммутация» или «Временная диаграмма бесщеточного двигателя постоянного тока». Обычно эти диаграммы иллюстрируют последовательность напряжения фазы двигателя или, альтернативно, состояние силовых переключателей фазы двигателя контроллера двигателя, коррелированное с состояниями датчика Холла в течение одного полного электрического цикла вращения. В таблице указано, на какие обмотки фазы двигателя следует подавать питание в зависимости от состояния переключателя датчика Холла, чтобы обеспечить оптимальный крутящий момент двигателя. Примеры каждого типа таблиц приведены ниже:
| 120° ЭЛЕКТРИЧЕСКОЕ РАСПОЛОЖЕНИЕ (формы сигналов относительно земли) |
Если корреляционные диаграммы двигателя и контроллера идентичны для обоих направлений вращения, просто соедините двигатель и контроллер напрямую, используя одну и ту же назначенную номенклатуру.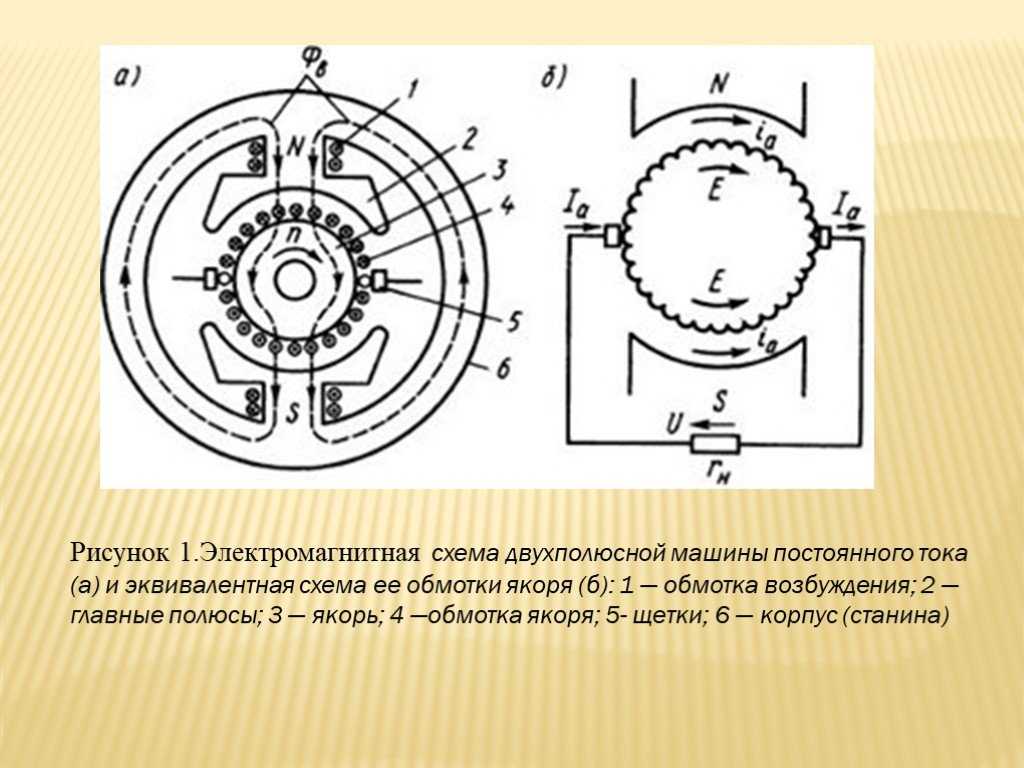 Например, провод фазы двигателя, обозначенный A, подключается к фазовому выходу электронного контроллера двигателя, обозначенному A, а провод датчика Холла двигателя, обозначенный 1, подключается к входу электронного контроллера двигателя, обозначенному датчиком Холла 1. Если они не совпадают точно, чем в таблице требуется манипуляция, чтобы определить, какие выводы фаз двигателя должны быть переназначены в соответствии с таблицей контроллера. Дополнительную информацию см. в разделе 3 «Подключение двигателя к электронному блоку управления».
Например, провод фазы двигателя, обозначенный A, подключается к фазовому выходу электронного контроллера двигателя, обозначенному A, а провод датчика Холла двигателя, обозначенный 1, подключается к входу электронного контроллера двигателя, обозначенному датчиком Холла 1. Если они не совпадают точно, чем в таблице требуется манипуляция, чтобы определить, какие выводы фаз двигателя должны быть переназначены в соответствии с таблицей контроллера. Дополнительную информацию см. в разделе 3 «Подключение двигателя к электронному блоку управления».
Раздел 2. Измерение фазного тока для создания таблицы Холла двигателя
Для этого метода требуется следующее электронное оборудование: Состояние напряжения сигнала датчика воздействия.
Этот метод можно использовать для измерения таблицы корреляции датчика Холла, если эта информация недоступна. Этот метод включает подачу фиксированного постоянного тока в фазные обмотки двигателя для создания фиксированного электромагнитного полюса на периферии статора, как показано ниже. Двигатель размещается на скамье без какой-либо нагрузки, подключенной к
Двигатель размещается на скамье без какой-либо нагрузки, подключенной к
вал, при этом вал двигателя может свободно вращаться. Когда фазные обмотки двигателя находятся под напряжением, магнитный полюс ротора притягивается к электромагнитному полюсу статора, и полюс ротора вращается, чтобы выровняться под фазной обмоткой двигателя, в которую подается ток и который создает электромагнитный полюс на периферии статора. Состояния датчика Холла
записываются для этого углового положения ротора. Процесс повторяется путем подачи тока в другую комбинацию фазных катушек статора, создавая электромагнитный полюс в другом угловом положении на периферии статора. Ток от источника питания постоянного тока должен быть ограничен максимальным номинальным постоянным током двигателя, чтобы гарантировать отсутствие повреждения двигателя.
| Соединение, создающее магнитный полюс, выровненный под обмоткой фазы А.  | Соединение, создающее магнитный полюс обратной полярности, выровненный под обмоткой фазы C . |
На фазные обмотки двигателя подается питание в такой последовательности, которая последовательно вращает электромагнитный полюс статора вокруг периферии статора, производя последовательное вращение ротора. Состояния датчика Холла и направление вращения вала записываются при каждой последовательности возбуждения, создавая сопоставленную таблицу корреляции.
Производная таблица должна обрабатываться для контроллеров моторов с помощью шестиступенчатой (блочной) коммутации. Последовательность возбуждения фаз в таблице создает магнитный полюс на периферии статора, который совпадает с магнитным полюсом ротора. Датчики Холла показывают положение магнитного полюса ротора, совмещенного с фазой под напряжением. Фактическая последовательность фазового возбуждения должна создавать магнитный полюс на периферии статора, отстоящий в квадратуре от магнитного полюса ротора для создания крутящего момента. Шестиступенчатый (блочный) метод коммутации включает только две фазы одновременно. Выключенная фаза — это фаза, по которой ротор выровнен, а остальные фазы создают полюс электромагнита на периферии статора в квадратуре с положением магнитного полюса ротора. Отметьте x, указывающий фазу выключения для каждой строки таблицы, которая имеет одинарную полярность.
Шестиступенчатый (блочный) метод коммутации включает только две фазы одновременно. Выключенная фаза — это фаза, по которой ротор выровнен, а остальные фазы создают полюс электромагнита на периферии статора в квадратуре с положением магнитного полюса ротора. Отметьте x, указывающий фазу выключения для каждой строки таблицы, которая имеет одинарную полярность.
Магнитный полюс, генерируемый на периферии статора, который находится в квадратуре к полюсу ротора, может быть расположен либо +/-90 градусов от магнитного полюса ротора, контролируя полярность инжектируемых фазных токов на двух фазах. Расположение магнитного полюса, образующегося на периферии статора, относительно магнитного полюса ротора определяет направление вращения, при котором крутящий момент действует на ротор. Следовательно, изменение полярности двух фаз под напряжением будет прикладывать крутящий момент в противоположном направлении вращения.
| Магнитный полюс, созданный на периферии статора , расположенный на одной линии с магнитным полюсом ротора, когда три катушки статора находятся под напряжением в соответствии со схемой | |||||
| Магнитный полюс на периферии статора, расположенный в квадратуре с ротором магнитный полюс для создания вращения против часовой стрелки , когда две катушки статора находятся под напряжением в соответствии с диаграммой | |||||
| Магнитный полюс на статоре периферия расположена в квадратуре с ротором магнитный полюс для создания вращения по часовой стрелке, когда две катушки статора находятся под напряжением в соответствии с диаграммой ниже: |
Последовательность фаз двигателя для подачи питания для обеспечения вращения против часовой стрелки при заданном положении ротора, обеспечиваемом состояниями датчика Холла, представлена ниже:
Последовательность инвертируется для вращения против часовой стрелки:
Результирующая таблица корреляции фаз возбуждения двигателя к состоянию датчика Холла показано ниже:
Раздел 3: Подключение двигателя к электронному блоку управления
Ниже приведены примеры таблиц датчика Холла для электронного контроллера и двигателя.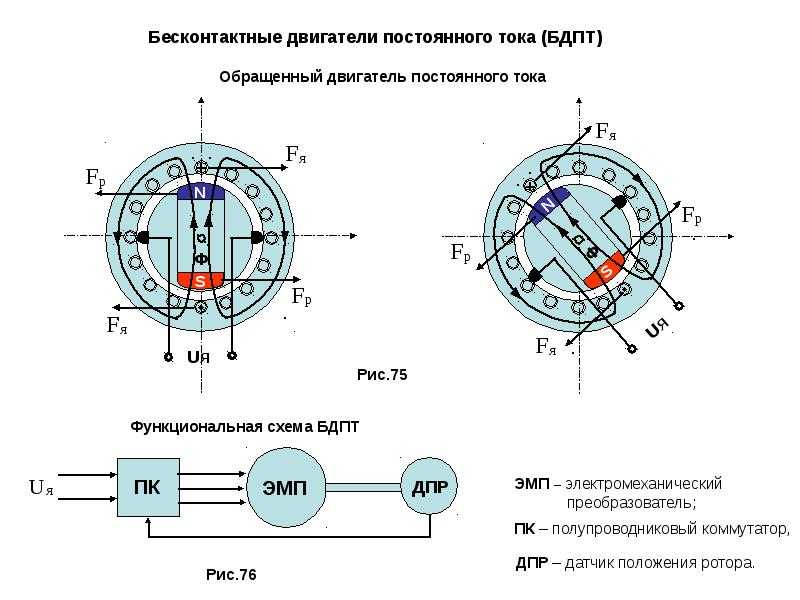
Первый шаг — корректировка строк таблицы до тех пор, пока части таблиц, относящиеся к датчику Холла, не станут идентичными:
Второй шаг — поменять местами столбцы обозначения фаз двигателя, пока таблицы не совпадут:
Переназначьте выводы фаз двигателя в соответствии с таблицей контроллера:
Диаграммы корреляции двигателя и контроллера теперь идентичны. Просто подключите двигатель и контроллер напрямую, используя одну и ту же обозначенную номенклатуру. Например, провод фазы двигателя, обозначенный буквой А, подключается к выходу фазы электронного контроллера двигателя, обозначенному буквой А, а провод датчика Холла двигателя, обозначенный цифрой 1, подключается к входу электронного контроллера двигателя, обозначенному датчиком Холла 1.
Раздел 4: Другие методы
Схема BEMF
Для этого метода требуется следующее оборудование:
4-канальный осциллограф заставляя двигатель BLDC работать в качестве генератора. Генерируемое двигателем напряжение между фазами A и B отслеживается на одном канале осциллографа, а состояния напряжения трех датчиков Холла отслеживаются на оставшихся трех каналах осциллографа. Корреляция генерируемых фазных напряжений двигателя и состояний датчика Холла обеспечивает взаимосвязь положения ротора фазы двигателя.
Генерируемое двигателем напряжение между фазами A и B отслеживается на одном канале осциллографа, а состояния напряжения трех датчиков Холла отслеживаются на оставшихся трех каналах осциллографа. Корреляция генерируемых фазных напряжений двигателя и состояний датчика Холла обеспечивает взаимосвязь положения ротора фазы двигателя.
Соединение методом проб и ошибок
Метод проб и ошибок включает в себя проверку всех возможных комбинаций подключения датчика Холла двигателя к электронному приводу до тех пор, пока не будет найдена оптимальная конфигурация. К сожалению, существуют комбинации, которые могут привести к очень неэффективному режиму работы двигателя. По этой причине может быть сложно определить оптимальную комбинацию подключения датчика Холла, поэтому этот метод не рекомендуется.
Многие электронные элементы управления содержат функции, помогающие обеспечить правильное подключение двигателя к электронному контроллеру. Примером может служить полностью программируемый на ПК привод IDEA от AMETEK Precision Motion Control, который предоставляет графическую информацию о фазировании двигателя и состояниях датчика Холла. Щелкните здесь, чтобы найти дополнительную информацию о программируемом приводе IDEA от Pittman для ПК.
Щелкните здесь, чтобы найти дополнительную информацию о программируемом приводе IDEA от Pittman для ПК.
Нажмите здесь, чтобы загрузить PDF-версию.
Двигатели постоянного тока как промышленные двигатели
ЦЕЛИ :
- Список применений двигателей постоянного тока.
- Описать электрические характеристики двигателей постоянного тока.
- Опишите структуру поля двигателя постоянного тока.
- Изменить направление вращения двигателя постоянного тока.
- Определите последовательные и шунтирующие поля, а также обмотку якоря с помощью
омметр. 903:50 - Соедините выводы двигателя, чтобы сформировать последовательный, шунтирующий или составной двигатель.
- Опишите разницу между дифференциальным и кумулятивным соединением
мотор.
Применение
Двигатели постоянного тока
используются в приложениях, где переменная скорость и большой крутящий момент
необходимы. Они используются для кранов и подъемников, когда грузы должны быть запущены
Они используются для кранов и подъемников, когда грузы должны быть запущены
медленно и быстро ускоряется. Двигатели постоянного тока также используются в печатных машинах,
сталелитейные заводы, трубопрокатные заводы и многие другие промышленные предприятия
где важен контроль скорости.
Регулятор скорости
Скорость двигателя постоянного тока можно контролировать, применяя переменное напряжение.
к арматуре или полю. Когда полное напряжение подается как на якорь, так и на поле, двигатель работает на своей базовой или нормальной скорости. Когда полный
на поле подается напряжение, а на якорь подается пониженное напряжение,
двигатель работает ниже нормальной скорости. При подаче полного напряжения на
на поле подается якорь и пониженное напряжение, двигатель работает
выше нормальной скорости.
Конструкция двигателя
Основными частями двигателя постоянного тока являются якорь, обмотки возбуждения, щетки и корпус (рис. 1).
1).
Арматура
Якорь — это вращающаяся часть двигателя. Он построен из
железный цилиндр с прорезями. Провод наматывается через
пазы для формирования обмоток. Концы обмоток соединены с
коммутатор, который состоит из изолированных медных стержней и установлен на
тот же вал, что и обмотки. Обмотки и коммутатор вместе образуют
арматура.
Угольные щетки, которые прижимаются к сегменту коллектора, подают питание
к якорю от сети постоянного тока. Коммутатор — механический.
переключатель, который заставляет ток течь через обмотки якоря в
то же направление. Это позволяет изменить полярность создаваемого магнитного поля.
в якоре оставаться постоянным при его вращении.
Сопротивление якоря поддерживается на низком уровне, обычно менее 1 Ом. Это потому что
регулирование скорости двигателя пропорционально сопротивлению якоря.
Чем ниже сопротивление якоря, тем лучше будет регулировка скорости.
быть. Там, где выводы щеток выходят из двигателя в клеммной коробке,
они обозначены A1 и A2.
Обмотки возбуждения
В двигателях постоянного тока используются обмотки возбуждения двух типов: последовательные и шунтирующие.
Последовательное поле создается несколькими витками большого провода. Он имеет низкое сопротивление и предназначен для последовательного соединения с якорем.
Маркировка клемм S1 и S2 идентифицирует последовательные обмотки возбуждения.
Шунтирующая обмотка возбуждения выполнена из множества витков тонкого провода. Оно имеет
имеет высокое сопротивление и предназначен для параллельного подключения к
арматура. Поскольку шунтирующее поле подключено параллельно якорю,
к нему подключено линейное напряжение. Ток через шунтирующее поле
следовательно, ограничивается его сопротивлением. Маркировка клемм для
поле шунта F1 и F2.
Рис. 1 Двигатель постоянного тока, полевая конструкция и якорь в сборе.
Рис. 2 подключения двигателя постоянного тока.
Рис. 3 Намотаны обмотки последовательного и шунтирующего возбуждения.
Идентификация обмоток
Обмотки двигателя постоянного тока можно определить с помощью омметра. Шунт
обмотку возбуждения можно отличить по тому, что она имеет высокое сопротивление
по сравнению с двумя другими обмотками. Последовательные обмотки возбуждения и якоря
имеют очень низкое сопротивление. Однако их можно определить, повернув
вал двигателя. Когда омметр подключен к последовательному полю и вал двигателя вращается, показания омметра не будут затронуты. Когда
омметр подключен к обмотке якоря, а вал двигателя
повернут, показания станут неустойчивыми, так как щетки контактируют друг с другом
с разными сегментами коммутатора.
Типы двигателей постоянного тока
Существует три основных типа двигателей постоянного тока: последовательные, параллельные и параллельные.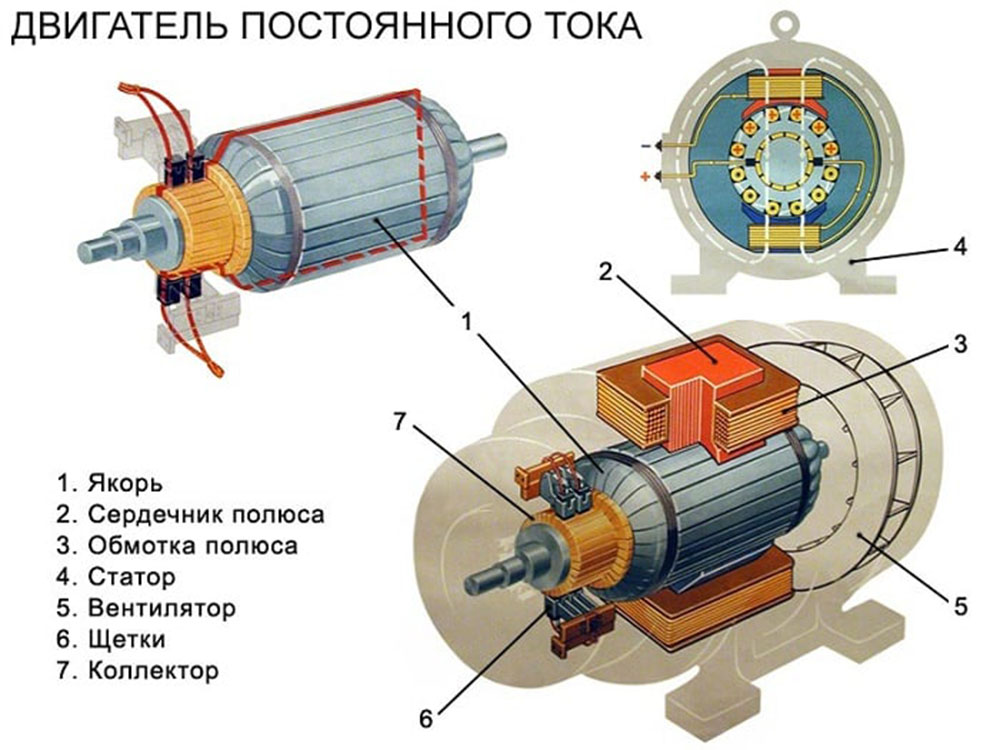
сложный. Тип используемого двигателя определяется требованиями
нагрузка. Серийный двигатель, например, может создавать очень высокий пусковой момент,
но его регулировка скорости плохая. Единственное, что ограничивает скорость
последовательного двигателя — это количество подключенной к нему нагрузки. очень распространенный
Применение серийного двигателя — это стартер, используемый в автомобилях.
Шунтирующие и комбинированные двигатели используются в приложениях, где регулирование скорости
важно.
На рис. 2 показаны основные соединения для последовательных, параллельных и комбинированных двигателей.
Обратите внимание, что последовательный двигатель содержит только последовательное поле, подключенное в
серия с арматурой. Шунтирующий двигатель содержит только шунтирующее поле
подключен параллельно якорю. Показан реостат, соединенный последовательно.
с шунтирующим полем для обеспечения контроля скорости выше нормальной.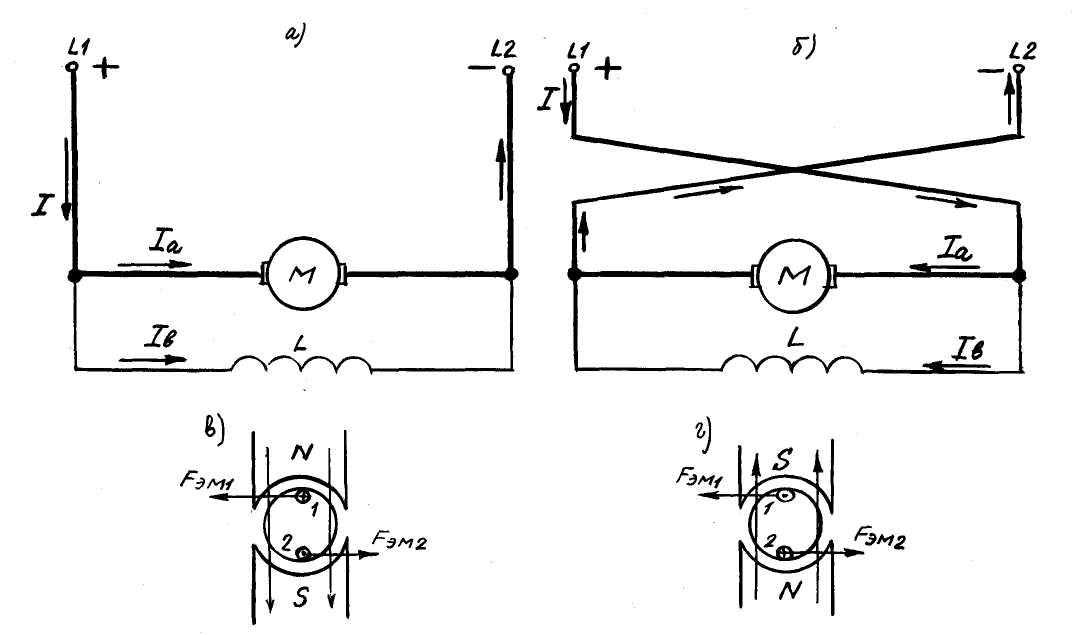
Составной двигатель имеет как последовательную, так и шунтирующую обмотки возбуждения. Каждый полюс
часть в двигателе будет иметь обе обмотки, намотанные на него (рис. 3). Там
различные способы соединения составных двигателей. Например, мотор
может быть подключен как длинный шунт или как короткий шунт
(ил. 4). Когда выполняется длинное шунтирующее соединение, шунтирующее поле подключается
параллельно как якорю, так и последовательному полю. При коротком шунте
соединение выполнено, поле шунта подключено параллельно якорю,
но последовательно с полем серии.
Составные двигатели
также могут быть подключены как накопительные или дифференциальные. Когда
двигатель подключен как кумулятивный компаунд, параллельное и последовательное поля
соединены так, что при протекании тока по обмоткам
они помогают друг другу в производстве магнетизма (илл. 5). Когда двигатель
соединен как дифференциальный состав, шунтирующая и последовательная обмотки возбуждения
соединены таким образом, что при протекании через них тока они
противодействуют друг другу в производстве магнетизма (илл. 6).
6).
Рис. 4 Составные соединения двигателя.
Рис. 5 Совокупное составное соединение.
Рис. 6 Дифференциальное составное соединение.
Рис. 7 Якорь вращается по часовой стрелке.
Направление вращения
Направление вращения якоря определяется соотношением
полярности магнитного поля якоря к полярности
магнитное поле полюсных наконечников. На рис. 7 показан двигатель, подключенный в
таким образом, что якорь будет вращаться по часовой стрелке из-за
к притяжению и отталкиванию магнитных полей. Если входные строки
к двигателю, магнитная полярность как полюсных наконечников, так и якоря будет изменена на противоположную, и двигатель будет продолжать работать.
в том же направлении (илл. 8).
Для изменения направления вращения якоря магнитная полярность
якоря и поля должны изменяться по отношению друг к другу.
На рис. 9 выводы якоря заменены, а выводы возбуждения заменены.
нет. Обратите внимание, что притяжение и отталкивание магнитных полей теперь
заставить якорь вращаться против часовой стрелки.
Если необходимо изменить направление вращения последовательного или параллельного двигателя,
можно поменять местами выводы возбуждения или якоря. Много маленьких шунтов постоянного тока
реверсирование двигателей осуществляется путем обратного подключения проводов шунтирующего поля.
Это сделано потому, что ток, протекающий через шунтирующее поле, намного ниже
чем ток, протекающий через якорь. Это позволяет небольшой переключатель,
вместо большого соленоидного выключателя для использования в качестве реверсивного выключателя. Больной.
10 показан двухполюсный двухпозиционный переключатель (DPDT), используемый в качестве реверсивного переключателя.
выключатель. Питание подключается к общим клеммам выключателя и
стационарные терминалы имеют перекрестное соединение.
При реверсировании составного двигателя меняются только выводы якоря.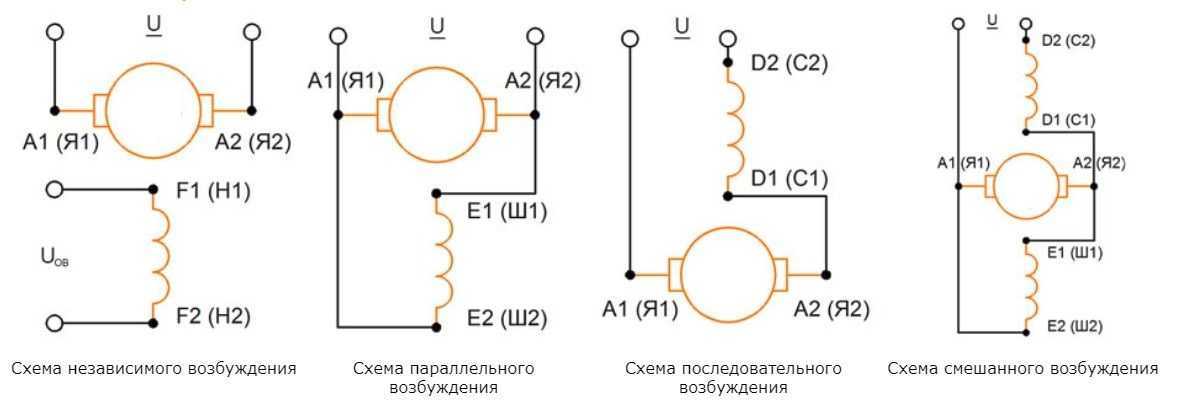
Если двигатель реверсируется путем замены проводов шунтирующего поля, двигатель
быть изменен с кумулятивного составного двигателя на дифференциальный составной
мотор. Если это произойдет, скорость двигателя резко упадет при нагрузке.
добавил в двигатель.
На рис. 11 показана схема реверсирования с использованием магнитных контакторов для переключения
направление тока, протекающего через якорь. Обратите внимание, что направление
тока через последовательное и шунтирующее поля остается одинаковым независимо от того,
контакты F или R замкнуты.
Рис. 8 Изменение входных строк не изменит направление вращения.
Рис. 9 При перепутывании выводов якоря направление вращения
изменен.
Рис. 10 Двухполюсный двухпозиционный переключатель, используемый для изменения направления
вращения шунтового двигателя.
Рис. 11 Контакторы меняют направление тока через
арматура.
Стандартные соединения
Когда двигатели постоянного тока намотаны, выводы клемм маркируются в стандарте.
способ. Это позволяет определить направление вращения, когда
обмотки двигателя соединены. Направление вращения определяется
обращенный к коллекторному концу двигателя, который обычно расположен на
задней части двигателя, но не всегда. На рис. 12 показаны стандартные соединения.
для серийного двигателя на рис. 13 показаны стандартные соединения для шунта
двигателя, а на рис. 14 показаны стандартные соединения для накопительного ком
фунт мотор.
Рис. 12 Стандартные соединения для серийных двигателей.
Рис. 13 Стандартные соединения для параллельных двигателей.
Рис. 14 Стандартные соединения для составных двигателей.
ВИКТОРИНА :
1. Как заставить двигатель постоянного тока работать со скоростью ниже нормальной?
2.